MACCHINE E AZIONAMENTI
ELETTRICI
Corso di Laurea in Ingegneria Industriale
La macchina sincrona
D
Docente
t Prof.
P f Francesco
F
Benzi
B
i
Università di Pavia
e-mail: [email protected]
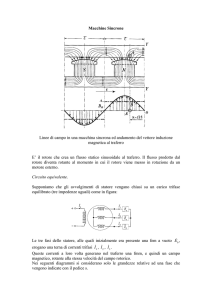
Principio di funzionamento
• Nella macchina sincrona la coppia deriva dall’interazione del campo
magnetico rotante generato da un avvolgimento (alternato trifase) di
statore (l’
(l armatura) e del campo di rotore prodotto dall
dall’avvolgimento
avvolgimento
monofase in continua disposto sul rotore e ruotante con esso
(avvolgimento di eccitazione o di campo).
• Condizione necessaria per lo sviluppo di una
coppia stabile è che si verifichi il
sincronismo fra la velocità del campo
magnetico rotante di statore e la
velocità meccanica del rotore.
ωs
ωr
• Per una data frequenza delle correnti di armatura
la macchina sincrona funziona a regime
g
a velocità
fissa definita dal numero di poli
ωm =
ωe
(pp)
ωe = 2πfe = Pulsazione delle correnti di statore
La macchina sincrona – Francesco Benzi
2
Operazione da generatore
• L’uso da generatore è quello prevalente sia come numero di macchine, sia
come potenza installata
• I generatori sincroni o alternatori sono impiegati nelle centrali elettriche
• Potenze fino a migliaia di MVA
• Richiede un motore primo per generare potenza elettrica alla frequenza di
sincronismo:
(pp) n
f=
[Hz]
60
Pe
Convenzione dei motori:
J
dω
= Ce - Cr
dt
Potenza uscente
La macchina sincrona – Francesco Benzi
Pm
ωm
Rete
Nell funzionamento
N
f
i
t d
da generatore
t
Ce e Cr risultano negative:
Pe = Ce ×ωm < 0
n velocità [giri/min]
Trasformatore
Alternatore
Ce
ωm
Cr
Motore
primo
3
Operazione da motore
• L’uso da motore è meno comune
• Taglie di potenza per motori industriali (fino a diverse migliaia di MW)
• Opera a velocità determinate dalla frequenza elettrica di alimentazione:
n=
60 f
[giri/min]
(pp)
• Un azionamento con inverter consente il funzionamento a velocità variabile
Pe
Pm
Rete
50 Hz
Inverter
f var.
ωm
Trasformatore
Motore
sincrono
Pe = Ce ×ωm > 0
La macchina sincrona – Francesco Benzi
Ce
ωm
Cr
Carico
Mecc.
Potenza entrante
4
Aspetti costruttivi – Lo statore
• TRIFASE – Avvolgimenti distribuiti
• LAMINATO - Sede di correnti
parassite
• CAVE – Aperte o semiaperte
Statore di un alternatore di centrale idroelettrica.
Particolare dello
statore dell'alternatore
con avvolgimento a
doppio strato.
http://picasaweb.google.com/cupertinof
La macchina sincrona – Francesco Benzi
5
Aspetti costruttivi – Il rotore
•Turboalternatori (trascinati da
turbine a vapore o gas)
-Rotore liscio, fuso
f
in acciao
-Elevate velocità 3000/1500 giri/min
(2/4 poli)
•Alternatori (trascinati da turbine
idrauliche)
-Rotore a poli salienti
salienti, espansioni
polari fissate al nucleo
-Basse velocità 1000/200 giri/min
(6/30 poli)
La macchina sincrona – Francesco Benzi
http://picasaweb.google.com/cupertinof
6
Aspetti costruttivi – Circuito di eccitazione
(Eccitatrice)
•Il circuito di eccitazione può essere
realizzato:
•con una dinamo
di
eccitatrice
it t i con contatti
t tti
striscianti
con un eccitatrice brushless (senza
•con
spazzole) con induttore e ponte di
conversione
http://picasaweb.google.com/cupertinof
La macchina sincrona – Francesco Benzi
7
Aspetti costruttivi – Avvolgimenti smorzatori
(Gabbia Smorzatrice)
•Sul rotore è spesso disposta una gabbia costituita da sbarre conduttrici
chiuse agli estremi in corto circuito,
circuito il cui funzionamento è simile a quello
di una gabbia di scoiattolo in una macchina asincrona.
•Gli avvolgimenti sono investiti da un campo variabile quando il campo
magnetico rotante di armatura ha una velocità diversa dal rotore (motore
fuori sincronismo): in questi casi si generano fem, correnti e una coppia.
•Gli avvolgimenti smorzatori intervengono:
•Allo SPUNTO, nel funzionamento da motore: consentono alla
macchina di avviarsi da ferma e portarsi alla velocità di sincronismo
•Ogni volta che viene meno il sincronismo e quindi la coppia, ad es.
a seguito di improvvise variazioni di carico
•A
A REGIME non intervengono:
i t
tensione
t
i
indotta
i d tt e corrente
t sono nulle.
ll
•Possono essere schematizzati come un gruppo di avvolgimenti trifase in
corto circuito.
http://picasaweb.google.com/cupertinof
La macchina sincrona – Francesco Benzi
8
Trasformazione della macchina su un unico sistema
di riferimento fisso
*
Q
Avvolgimenti trasformati
PSEUDOSTAZIONARI*
S U OS
O
t
e
D, Q e
-
s,t
-
s
•Si sceglie come sistema di riferimento (SdR)quello solidale
con il rotore, quindi in rotazione a velocità fissa legata alla
frequenza di alimentazione
•Gli avvolgimenti di statore sono trasformati sul nuovo SdR
come avvolgimenti in quadratura e le grandezze elettriche
passano da alternate a continue.
Gli avvolgimenti di rotore non modificano le proprie
•Gli
caratteristiche di frequenza (la corrente di eccitazione
rimane continua)
D
*
Avvolgimenti in quadratura, pseudostazionari, trasformati, corrispondenti agli avvolgimenti
A, B, C di statore
Avvolgimento monofase di eccitazione sul rotore
Avvolgimenti smorzatori, trasformati rispetto agli smorzatori reali disposti a gabbia in
quadratura
La macchina sincrona – Francesco Benzi
9
Equazioni elettriche della macchina nel sistema trasformato (5° ordine)
⎡v D ⎤ ⎡RD
⎢v ⎥ ⎢ 0
⎢ Q⎥ ⎢
⎢" ⎥ ⎢ "
⎢ ⎥=⎢
⎢v e ⎥ ⎢ 0
⎢v s ⎥ ⎢ 0
⎢ ⎥ ⎢
⎣vt ⎦ ⎣ 0
0
RQ
"
0
0
0
⎤ ⎡ i D ⎤ ⎡ LD
⎢ ⎥ ⎢ 0
#
0
0
0 ⎥ iQ
⎥⎢ ⎥ ⎢
" " " " ⎥ ⎢"⎥ ⎢ "
⎥ ⎢ ⎥ + ⎢M
# Re
0
0 ⎢ ie ⎥
⎢ De
⎥
#
0 Rs 0 ⎥ ⎢ i s ⎥ ⎢ M Ds
⎥⎢ ⎥ ⎢
#
0
0 Rt ⎦ ⎣ i t ⎦ ⎣ 0
#
0
0
0
0
#
M De
M Ds
LQ
#
0
0
"
"
"
"
0
#
Le
M es
0
#
M es
Ls
MQt
#
0
0
0
⎡ 0 -LQ #
⎢L
0
# M De
⎢ D
⎢" " " "
+ ωr ⎢
0
#
⎢0 0
⎢0 0
#
0
⎢
#
0
⎣0 0
La macchina sincrona – Francesco Benzi
0
⎤
MQt ⎥
⎥
"⎥ d
⎥
0 dt
⎥
0 ⎥
⎥
Lt ⎦
0
-MQt ⎤ ⎡ i D ⎤
M Ds
0
"
"
0
0
0
0
0
0
⎥ ⎢i ⎥
⎥⎢ Q⎥
⎥ ⎢"⎥
⎥⎢ ⎥
⎥ ⎢ ie ⎥
⎥ ⎢ is ⎥
⎥⎢ ⎥
⎦ ⎣ it ⎦
10
⎡ iD ⎤
⎢i ⎥
⎢Q⎥
⎢"⎥
⎢ ⎥+
⎢ ie ⎥
⎢ is ⎥
⎢ ⎥
⎣ it ⎦
Equazione della coppia
Ce = (pp) ⎣⎡ i D i Q
#
ie
is
⎡ LD
⎢ 0
⎢
⎢"
i t ⎦⎤ ⎢
⎢MDe
⎢MDs
⎢
⎣ 0
0
#
M De
M Ds
LQ
#
0
0
"
"
"
"
0
#
Le
M es
0
#
M es
Ls
MQt
#
0
0
= (pp) ⎡⎣( LD - LQ ) i D iQ + MDe i e iQ + MDs i s iQ - MQt i t i D ⎦⎤
0 ⎤ ⎡ iD ⎤
MQt ⎥ ⎢ i Q ⎥
⎥ ⎢ ⎥
" ⎥ ⎢"⎥
⎥⋅⎢ ⎥ =
0
⎥ ⎢ ie ⎥
0 ⎥ ⎢ is ⎥
⎥ ⎢ ⎥
Lt ⎦ ⎣ i t ⎦
Equazione meccanica
Jpωm = Ce - Cr
ωm = (pp)ωr
La macchina sincrona – Francesco Benzi
11
Equazioni elettriche della macchina sincrona a regime
-ωr LQ
M De p
M Ds p
-ωr MQt ⎤ ⎡ i D ⎤
#
⎡v D ⎤ ⎡RD + LD p
⎥ ⎢i ⎥
⎢v ⎥ ⎢ ω L
+
R
L
p
ω
M
ω
M
M
p
#
r De
r Ds
Q
Q
Qt
⎥⎢ Q⎥
⎢ Q⎥ ⎢ r D
"
"
"
"
" ⎥ ⎢"⎥
⎢" ⎥ ⎢ "
⎥⎢ ⎥
⎢ ⎥=⎢ M p
#
+
0
R
L
p
0
0
v
e
e
⎥ ⎢ ie ⎥
⎢ e ⎥ ⎢ De
⎥ ⎢ is ⎥
⎢ 0 ⎥ ⎢ MDs p
0
#
0
R s + Ls p
0
⎥⎢ ⎥
⎢ ⎥ ⎢
0
M
p
0
0
R
L
p
#
+
⎣0 ⎦ ⎣
Qt
t
t ⎦ ⎣ it ⎦
•A regime l’operatore p=d/dt si annulla, perché nel sistema di riferimento scelto le correnti
risultano costanti.
•A regime inoltre le correnti is e it risultano nulle e si annullano quindi le equazioni relative; il
sistema si riduce al 3° ordine e si semplifica come segue:
⎡v D ⎤ ⎡ RD
⎢v ⎥ = ⎢ω L
⎢ Q⎥ ⎢ r D
⎢⎣ v e ⎥⎦ ⎢⎣ 0
-ωr LQ
RQ
0
La macchina sincrona – Francesco Benzi
⎤ ⎡iD ⎤
ωr MDe ⎥⎥ ⎢⎢ iQ ⎥⎥
Re ⎥⎦ ⎢⎣ i e ⎥⎦
0
12
Equazioni meccaniche della macchina sincrona a regime
⇒
Jpωm = Ce - Cr
ωr
ωm =
(pp)
Ce = Cr
velocità di sincronismo
Equazione della coppia a regime
Ce = (pp) ⎡⎣( LD - LQ ) i D iQ + MDe i e i q ⎤⎦
•Le
Le correnti negli smorzatori non contribuiscono alla coppia a regime
Equazioni elettriche in forma sintetica
= RiD − X Q iQ
⎧v D = RiD − ω LQ iQ
⎪
⎨vQ = RiQ + ω LD iD + ω M Deie = RiQ + X D iD + ω M Deie
⎪
⎩ve = Reie
La macchina sincrona – Francesco Benzi
13
Equazioni della macchina sincrona in funzione dei flussi concatenati
ψD = LD i D + MDe i e + MDs i s
v D = RD i D + pψD - ωr ψQ
ψQ = LQ iQ + MQt i t
vQ = RQ iQ + pψQ + ωr ψD
ψe = Le i e + MDe
D i D + M es i s
v e = Re i e + p
pψ
ψe
ψs = Ls i s + MDs i D + Mes i e
v s = Rs i s + pψs
ψt = Lt i t + MQt iQ
v t = Rt i t + pψt
Equazioni della coppia in funzione dei flussi concatenati
Ce = (pp) ⎡⎣i D
iQ
ie
is
⎡-ψQ ⎤
⎢ψ ⎥
⎢ D⎥
i t ⎤⎦ ⋅ ⎢ 0 ⎥ = (pp) ⎡⎣ −ψQ i D + ψD iQ ⎤⎦ = (pp) ⎡⎣ψD iQ − ψQ iD ⎤⎦
⎢
⎥
0
⎢
⎥
⎢⎣ 0 ⎥⎦
•La coppia
pp viene q
qui vista come dovuta all’interazione delle componenti
p
dei campi
p
magnetici in quadratura
La macchina sincrona – Francesco Benzi
14
Equazioni della macchina nel sistema di riferimento naturale
⎡v A ⎤ ⎡R A
⎢v ⎥ ⎢ 0
⎢ B⎥ ⎢
⎢v C ⎥ ⎢ 0
⎢ ⎥=⎢
⎢v e ⎥ ⎢ 0
⎢v s ⎥ ⎢ 0
⎢ ⎥ ⎢
⎣v t ⎦ ⎣ 0
0
0
0
0
RB
0
0
0
0
RC
0
0
0
0
Re
0
0
0
0
Rs
0
0
0
0
⎤ ⎡i A ⎤
⎢ ⎥
0 ⎥ iB
⎥⎢ ⎥
0 ⎥ ⎢ iC ⎥ d
⎥⎢ ⎥+
0 ⎢ i e ⎥ dt
⎥
0 ⎥ ⎢ is ⎥
⎥⎢ ⎥
Rt ⎦ ⎣ i t ⎦
0
⎡ LA
⎢M
⎢ BA
⎢MCA
⎢
⎢ M eA
⎢ MsA
⎢
⎣ M tA
M AB
M AC
M Ae
M As
M At ⎤ ⎡ i A ⎤
LB
M BC
M Be
M Bs
MCB
LC
MCe
MCs
M eB
M eC
Le
M es
M sB
M sC
M se
Ls
M tB
M tC
M te
M ts
⎥⎢ ⎥
MCt ⎥ ⎢ i C ⎥
⎥⎢ ⎥
M et ⎢ i e ⎥
⎥
M st ⎥ ⎢ i s ⎥
⎥⎢ ⎥
Lt ⎦ ⎣ i t ⎦
⎢ ⎥
M Bt ⎥ i B
Per i p
passaggi
gg successivi si veda il file Macchina sincrona complementi
p
La macchina sincrona – Francesco Benzi
15
Modello della macchina sincrona a regime
Il modello della macchina sincrona a regime comprende l’equazione
elettrica di rotore (in c.c.) e le equazioni del circuito trifase di statore
((armatura),
), ridotto nei casi di costruzione e alimentazione simmetrica a
una singola equazione di fase. Valgono inoltre le equazioni meccaniche.
A’
Equazione del circuito di eccitazione:
tensioni e correnti continue a regime
ωr
Asse di statore
(Fase A)
Ve
t=0
Asse di rotore (asse D)
= Re I e
Equazione
E
i
del
d l circuito
i it di armatura:
t
tensioni e correnti alternate della fase A
Va = Ra I a +
A
jX s I a + E
E forza elettromotrice indotta sullo
statore dal flusso di rotore:
E=
ωΦae
2
=
ω M ae I e
2
Equazione meccanica (velocità di sincronismo:
ωm = ω
La macchina sincrona – Francesco Benzi
16
Modello della macchina sincrona a regime
Circuito equivalente,
equivalente diagramma vettoriale
Va = Ra I a + jX s I a + E
Ia
Convenzione
degli utilizzatori
Va
Ra I a
jX s I a
q
E
jX s I a
Va
Diagramma vettoriale di
Behn-Eshemburg, valido per
le macchine isotrope
Ra I a
E
Ia
I e , Φe
d