Politecnico di Milano – Polo Regionale di Lecco
Master in “Analisi e gestione del patrimonio paesistico”
Modulo 4: Disegno e rappresentazione
del territorio e del paesaggio
Elementi di Fotogrammetria
Ing. Marco Scaioni
Politecnico di Milano – Polo Regionale di Lecco
Lecco, 29 Gennaio 2004
Introduzione
Fotogrammetria: ricostruzione di oggetti 3D
a partire da due o più immagini.
Fondamento:
collinearità fra
punto immagine,
punto di presa e
punto oggetto.
Metodo: noti posizioni ed assetto dei fotogrammi, intersecando
i raggi omologhi si ottiene la posizione del punto oggetto
Vantaggi della fotogrammetria
•Rilievi a distanza a qualsiasi scala
•Possibilità di usare più fotogrammi, quindi ripresa di zone
molto ampie (cartografia)
•il dato acquisito (i fotogrammi) costituiscono una
descrizione (quasi) continua dell’oggetto ripreso e non solo
puntuale
•il contenuto dell’informazione è facilmente interpretabile e
classificabile
•gli aspetti analitici sono ben noti e facilmente modellizzabili
(a differenza delle immagini satellitari)
Principali applicazioni
Fotogrammetria dall’aereo:
•coordinate 3D di punti che descrivono l’oggetto
•cartografia numerica
•dati strutturati per GIS
•modelli digitali del terreno (DTM)
•ortofoto
Fotogrammetria da terra:
•rilievi architettonici
•misure di precisione in campo industriale
•raddrizzamenti
Elementi di aero-fotogrammetria
Argomenti presentati:
•il principio geometrico fondamentali
•le fasi del rilievo fotogrammetrico: acquisizione,
orientamento e restituzione
•la visione stereoscopica
•orientamento interno e caratteristiche dei fotogrammi
•orientamento esterno (relativo e assoluto)
•i punti d’appoggio
•gli strumenti restitutori
Il principio geometrico fondamentale
Se un punto risulta
visibile in almeno due
immagini, posso
ricostruire la sua
posizione 3D in un dato
sistema di riferimento.
L’operazione di ricostruzione del contenuto di un
fotogramma prende il nome di restituzione.
L’acquisizione dei fotogrammi
prese aeree
prese terrestri
L’orientamento dei fotogrammi
Un fotogramma è
assimilabile ad una
prospettiva centrale
su un piano.
La restituzione di un oggetto
comporta la ricostruzione
della geometria di presa:
ORIENTAMENTO INTERNO:
posizione del piano immagine
rispetto al centro di presa
ORIENTAMENTO ESTERNO:
assetto del fotogr. e posizione del
centro di presa nel sistema di
riferimento dell’oggetto.
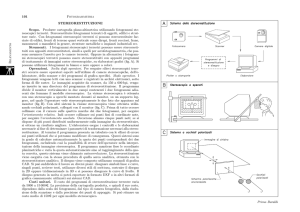
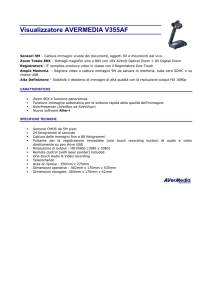
La stereoscopia
L2
C
P2
O1
b
O2
b = L (1 - p )
H
Se i fotogrammi sono quasi
nadirali (assi di presa paralleli e
rotazione relativa nulla), mediante
un stereoscopio posso ottenere
una visione 3D dell’oggetto
rilevato.
L1
P1
b
pL
L
Questo principio facilita la restituzione, perchè non dovrò
più collimare separatamente i punti su fotogrammi diversi,
ma collimerò un unico punto sul modello stereoscopico.
Inoltre, posso restituire i punti ad una quota prefissata
(curve di livello) mediante il principio della marca mobile
L’orientamento interno
I fotogrammi utilizzati in fotogrammetria aerea sono di
tipo metrico, cioè consentono di ricostruire
accuratamente la posizione del piano immagin rispetto
al centro di presa.
Questo avviene mediante la conoscenza di alcuni
elementi noti dalla calibrazione della camera, effettuata
periodicamente in laboratorio:
•punto principale
•coordinate delle marche fiduciali
•distanza principale
•curva di distorsione
I fotogrammi aerei
L’orientamento esterno
2 fasi:
orientamento relativo:
si restituisce un modello
dell’oggetto in una scala
e un sistema di
riferimento arbitrari
orientamento assoluto:
si scala opportunamente
il modello e lo si riporta
nel SdR voluto
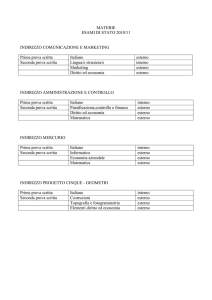
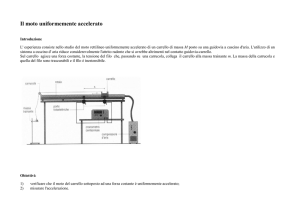
L’orientamento relativo
Y
b
3
4
a
Si considera una coppia
di fotogrammi
sovrapposti e si
misurano le coordinate
di 6 punti posti in
posizioni prefissate.
Per l’O.R. non è
necessario conoscere
punti sul terreno; infatti il
SdR verrà fissato con
l’O. assoluto
X
1
2
5
6
N. di incognite: 5
L’orientamento assoluto
Il modello restituito viene
scalato e rototraslato
utilizzando alcuni punti
d’appoggio noti sul terreno e
misurabili sui fotogrammi.
Le incognite da calcolare
sono 7 (3 angoli, 3 traslazioni
e la scala).
Per ogni coord. nota di un
punto d’appoggio posso
determinare una incognita.
N. min. di punti: 3
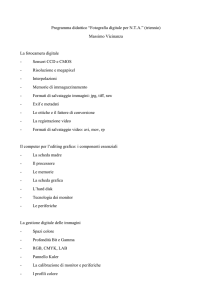
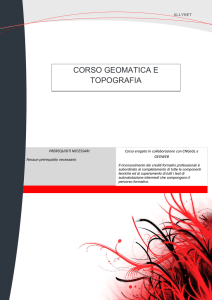
Il caso normale: precisioni ottenibili
E’ un caso
ideale, in cui
mediante
formule dirette
è possibile
calcolare la
posizione dei
punti incogniti e
la loro
precisione.
m
50000
10000
1000
100
25
B/Z = 1:1
σXY
σZ
0.36
0.25
0.72
0.50
0.72
0.50
0.72
0.50
0.18
0.13
B/Z = 1:3
σ XY
σZ
0.43
0.75
0.86
1.50
0.86
1.50
0.86
1.50
0.22
0.38
B/Z = 1:10
σ XY
σZ
0.90
2.50
1.81
5.00
1.81
5.00
1.81
5.00
0.45
1.25
B/Z =1:20
σ XY
σZ
1.70
5.00
3.41
10.00
3.41
10.00
3.41
10.00
0.85
2.50
m
dm
cm
mm
mm
Il rilievo per la cartografia
Le fasi di un rilievo per la produzione di cartografia
•progettazione del volo
•esecuzione del volo e acquisizione dei fotogrammi
•misurazione della rete per l’appoggio topografico
•triangolazione aerea
•restituzione
•completamento della cartografia numerica (ricognizione,
editing e disegno cartografico, preparazione degli elaborati
finali - le carte - su supporto informatico e cartaceo)
Scelta della scala fotogramma
Legame tra la scala della carta da realizzare e quella dei
fotogrammi da acquisire.
Criterio: per grandi scale, si deve garantire una restituzione
alla precisione richiesta.
Per piccole scale si deve garantire l’interpretabilità.
Scala carta
1:500 1:1000 1:2000 1:5000 1:10000 1:25000 1:50000
________________________________________________________________
Scala fotogr.
Min.
1:5000 1:8000 1:12000 1:18000 1:25000 1:45000 1:60000
Max.
1:3000 1:5000 1:8000 1:11000 1:18000 1:28000 1:40000
Il volo aero-fotogrammetrico
Ricoprimenti standard:
longitudinale: 60-65% trasversale: 20-30%
Esempio di blocco
Città di Lucera (Puglia) - scala media 1:8600
L’appoggio topografico del blocco
Per l’orientamento assoluto di tutti i modelli è necessario
conoscere un numero sufficiente di punti d’appoggio.
Questi devono essere determinati per via topografia
(classica o GPS) oppure derivare da altri rilievi
fotogrammetrici della stessa zona.
I punti d’appoggio
definiscono il SdR
nel quale verrà
restituita la
cartografia
La triangolazione aerea
La misura dei punti d’appoggio sul terreno è
un’operazione lunga e costosa, soprattutto nel caso di
blocchi di grandi dimensioni e in zone impervie.
In questi si fa ricorso alla triangolazione aerea.
Una volta eseguiti gli orientamenti relativi e quindi aver
legato i fotogrammi tra loro, non si utilizzano 3 punti
d’appoggio per orientare ogni singolo modello, ma si
orientano il blocco insieme utilizzando un numero ridotto
di punti d’appoggio. Si imposta in questo modo un unico
sistema di equazioni che fornisce i parametri di
orientamento assoluto di ogni modello.
T.A.: distribuzione dei punti di appoggio
I restitutori analitici
La restituzione viene eseguita una volta ultimato
l’orientamento interno ed esterno di tutti i fotogrammi del
blocco.
Lo strumento utilizzato per questa operazione, così come
pure per le fasi di orientamento, è il restitutore analitico.