Dispositivi per il controllo diretto: dispositivi che implementano
algoritmi di controllo e che sono collegati direttamente ai sensori ed
agli attuatori presenti sul processo da controllare
Dispositivi per il controllo
Schema di anello di controllo digitale
r
e
A/D
-
Calcolatore
digitale
D/A
Attuatore
Sistema da
controllare
Clock (T)
y
Trasduttore
di misura
Dispositivi per il controllo
1
Dispositivi per il controllo
Caratteristiche fondamentali:
Capacità di rispondere a stimoli provenienti dal loro esterno sottoforma di
eventi o dati che arrivano ai sensori
Capacità di agire al loro esterno modificando il comportamento del
processo che controllano
Possibili funzionalità:
controllo a ciclo chiuso di variabili fisiche (regolazione o asservimento)
calcolo dei valori di riferimento per tali variabili
controllo logico sequenziale
gestione di allarmi ed anomalie
interfaccia operatore
comunicazione con altri dispositivi
Dispositivi per il controllo
Dispositivi per il controllo
Modalità di esecuzione dei compiti:
periodica, ad intervalli di tempo assegnati
ciclica, appena terminata l’esecuzione ricomincia daccapo
una sola volta, all’occorrenza di particolari eventi
Interazione:
processo fisico (trattamento segnali I/O)
altri dispositivi di controllo e supervisione
Dispositivi per il controllo
2
Dispositivi per il controllo
Esecuzione in tempo reale: un sistema di elaborazione a tempo reale
deve rispondere in modo certo ed entro tempi fissati ad eventi esterni
non prevedibili.
Requisiti hardware per l’esecuzione in tempo reale:
l’utilizzo di processori dotati di adeguata velocità di elaborazione
tempo di esecuzione delle istruzioni noto (almeno nei valori massimi)
accesso alla memoria ed ai dispositivi I/O veloce, affidabile e
deterministico
garanzia di una tempificazione certa
presenza di funzioni di autodiagnostica
ridondanze strutturali (per operare in caso di malfunzionamenti)
Dispositivi per il controllo
Dispositivi per il controllo
Ove presente, il sistema operativo del dispositivo di controllo si deve
occupare della pianificazione dell’esecuzione dei processi (scheduling)
e della gestione della comunicazione tra i processi.
Per essere in tempo reale, il sistema operativo deve:
avere una politica di pianificazione dell’esecuzione con meccanismo di
assegnazione priorità
essere multitasking pre-emptive (è possibile interrompere un processo per
trasferire risorse ad un processo che ne ha bisogno)
evitare situazioni di deadlock tra i processi
realizzare un meccanismo di sincronizzazione e comunicazione tra
processi che sia prevedibile
aver noti i tempi massimi necessari per sospendere un processo, lanciarne
un altro e realizzare una chiamata di sistema
gestire in maniera opportuna i malfunzionamenti
Dispositivi per il controllo
3
Dispositivi per il controllo
Controllori a logica programmabile (PLC)
Controllori per applicazioni generiche
Monolitici
A bus
Basati su PC
Controllori specializzati
Regolatori PID industriali
Controllori per motori elettrici
Controllori di macchine a controllo numerico e robot
Dispositivi per il controllo
PLC – Cenni storici
Prime applicazioni di automazione utilizzavano dispositivi
elettromeccanici (relè e temporizzatori). Lenti, costosi, difficilmente
riconfigurabili. Progettazione, installazione e manutenzione complesse.
L’avvento dell’elettronica (transistor e circuiti integrati) permise di
superare alcuni di questi problemi ma i sistemi risultavano ancora non
flessibili
L’avvento dei PLC risale al 1968 quando General Motors specificò le
caratteristiche di un nuovo dispositivo:
facilmente programmabile e riprogrammabile
facile manutenzione
robusto per ambienti industriali
dimensioni contenute
competitivo nei costi
PLC
4
PLC
Un controllore a logica programmabile (o PLC,
Programmable Logic Control):
un dispositivo flessibile
concezione modulare
architettura a bus
specializzato per il controllo logico sequenziale
gestisce migliaia di I/O
sistema operativo real-time multi-tasking
PLC
PLC
Definizione di PLC secondo lo standard IEC 61131-1:
Sistema elettronico a funzionamento digitale, destinato all’uso in
ambito industriale, che utilizza una memoria programmabile per
l’archiviazione interna di istruzioni orientate all’utilizzatore per
l’implementazione di funzioni specifiche, come quelle logiche, di
sequenziamento, di temporizzazione, di conteggio e di calcolo
aritmetico, e per controllare, mediante ingressi ed uscite sia digitali
sia analogici, vari tipi di macchine e processi
Definizione di Sistema PLC
configurazione realizzata dall’utilizzatore, formata da un
controllore a logica programmabile e dalle periferiche associate,
necessarie al sistema automatizzato previsto
PLC
5
PLC
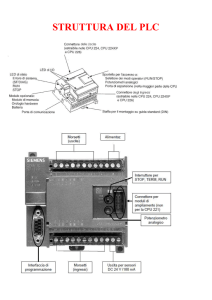
Configurazione minima:
Armadio
Modulo processore
Moduli ingresso/uscita
Modulo alimentatore
Terminale programmazione
PLC
PLC – Modulo processore
Scheda con uno o più processori che eseguono programmi
del sistema operativo o programmi utente
Memoria volatile e non volatile
Specializzato per eseguire operazioni su bit tipiche del
controllo logico/sequenziale
PLC
6
PLC – Modulo processore
Modalità di funzionamento ciclica:
aggiornamento area di memoria con i valori provenienti da ingressi fisici
esecuzione del programma utente
esecuzione dei programmi di gestione sistema (es. diagnostica)
scrittura sulle uscite fisiche dei valori in memoria
Tale ciclo è detto “ciclo a copia massiva degli ingressi e delle uscite”
il PLC è cieco fino alla successiva lettura ingressi
ritardo nella rivelazione del cambio ingresso (nel caso peggiore è pari al
tempo esecuzione di un ciclo)
il ciclo non ha durata prefissata ma dipende dalla lunghezza del
programma e dalla sua natura (presenza cicli)
PLC
PLC – Modulo processore
Eccezioni al ciclo a copia massiva
È prevista la possibilità di eseguire operazioni con accesso immediato ai
punti I/O (es. gestione emergenze). Allungano tempi di scansione
gestione intrrupt temporizzati (per algoritmi a controllo numerico) o
collegati allo stato di un segnale di ingresso
Velocità di elaborazione è descritta dal tempo di scansione
Tempo di scansione: tempo che intercorre tra due attivazioni
successive della stessa porzione del programma applicativo nella
modalità di funzionamento ciclico (compreso tempo aggiornamento
I/O)
Tempo di scansione legato a numero I/O ed a dimensione e
complessità del programma utente. Decina di millisecondi per
Kiloword (1 Kiloword=1024 parole) di programma
PLC
7
PLC – Modulo processore
Tempo di risposta: massimo intervallo di tempo che passa
dalla rivelazione di un certo evento e l’esecuzione
dell’azione di risposta programmata. Dipende anche da
ritardi introdotti dai moduli I/O.
Relazione tempo di scansione e tempo di risposta:
Tr ≈ 2 Te + TI/O
Tr
TI
Te
TO TI
Te
TO TI
Te
TO
t
PLC
PLC – Modulo processore
Funzioni di diagnostica interna:
watchdog timer sulle funzioni principali
controlli di parità sulla memoria e su linee di comunicazione
controllo tensione alimentazione
controllo stato batterie tampone
Modalità operative (attivate con chiave hardware):
esecuzione
convalida
programmazione
PLC
8
PLC – Modulo processore
Organizzazione memoria per aree:
area sistema operativo (non volatile a sola lettura)
area lavoro sistema operativo (RAM)
area ingressi/uscite (RAM)
area programmi utente (RAM- PROM)
area dati utente (RAM)
Alcune aree di memoria alimentate da batterie tampone
Dimensione memoria da mezzo Kiloword a centinaia di Kiloword (word di 816 bit)
Altre caratteristiche: numero strutture speciali (timer, contatori), possibilità
espansione, numero armadi I/O gestibili (direttamente o da remoto), numero e
tipologia porte comunicazione, linguaggi supportati, gestione multi-tasking ed
interrupt
PLC di sicurezza - Ridondanza strutturale (abilitazione uscita solo se accordo )
PLC
PLC – Moduli ingresso/uscita
I moduli di ingresso ed uscita, sia analogici che digitali, sono i moduli
con cui il PLC comunica con il processo fisico, rilevando eventi e dati
dai sensori e comandando azioni agli attuatori
Realizzano l’interfaccia tra livelli di tensione TTL o CMOS (con cui opera
il PLC) e le tensioni (o correnti) per la trasmissione di segnali
Permettono di connettere il PLC direttamente ai vari dispositivi presenti
sul campo
I/O sono isolati galvanicamente (tramite fotoaccoppiatori o trasformatori)
dall’elettronica interna per evitare danni dovuti ad impulsi di tensione
Garantiscono la modularità necessaria per dimensionare il PLC su misura
per l’applicazione
Modularità tipiche punti: 2, 4, 8, 12, 16, 32, 64, 128
Il loro indirizzamento da programma dipende da dove fisicamente il
modulo viene posto nell’armadio del PLC
PLC
9
PLC – Moduli ingressi digitali
Per collegare sensori che restituiscono
un’informazione binaria (ON-OFF)
Forniti di circuiti di filtraggio
contro rumore e rimbalzi
Caratteristiche:
numero di ingressi gestibili
tensioni di riferimento
ritardo di segnale
ON
OFF
ON
t
Valori tipici di riferimento per gli stati ON OFF:
0~24 V -- 0~220 V in corrente continua o alternata
0~5 V in corrente continua (livello TTL)
0~50 V in corrente continua
PLC
PLC – Moduli uscite digitali
Per collegare attuatori a cui dare comandi digitali (ON-OFF)
Un comando digitale per essere eseguito dalla CPU deve essere trasformato da
VALORE BINARIO delle memoria dati a TENSIONE DI COMANDO
Ad esempio la bobina di un contattore può assumere due stati:
BOBINA NON ALIMENTATA = CONTATTI DI COMANDO PLC APERTO =
0 Vcc all’uscita del PLC;
a questo stato l’interfaccia di uscita associa al valore BINARIO 0 (=OFF=FALSO), lo stato
aperto del contatto di uscita
BOBINA ALIMENTATA = CONTATTI DI COMANDO PLC CHIUSO = 24 Vcc
all’uscita del PLC; a questo stato l’interfaccia di uscita associa al valore BINARIO
1(=OFF=FALSO), lo stato chiuso del contatto di uscita
Protette mediante fusibili;
Realizzate attraverso transistori (cc), TRIAC o SCR (ca) o relè (cc e ca)
PLC
10
PLC – Moduli I/O Analogici
Per collegare sensori ed attuatori caratterizzati da un segnale
analogico, ovvero che varia con continuità in un certo range
Un segnale ANALOGICO (0…100% del fondoscala, 0…10V, ecc.)
per essere letto dalla CPU (che lavora con stringhe di bit di lunghezza
finita nel tempo discreto) deve essere trasformato in una stringa di bit
(segnale digitale) da consegnare alla memoria dati
I moduli I/O analogici realizzano le conversioni analogiche/digitali o
digitali/analogiche richieste per interfacciare direttamente segnali
analogici con il PLC
Caratteristiche:
Trattano un’ampia gamma di segnali
Intervalli di lavoro e caratteristiche filtranti selezionabili via software
Scalatura automatica del dato in unità ingegneristiche
Optoisolati
Possiedono indicatori di stato
PLC
PLC – I/O Analogici
Esempio si consideri un trasduttore di pressione 0…1 bar, con uscita
ANALOGICA 0…10V (ingresso analogico per il PLC):
se la pressione misurata è pari a 0 bar il segnale analogico misura 0 V
se la pressione misurata è pari a 0,5 bar il segnale analogico misura 5 V
se la pressione misurata è pari a 1 bar il segnale analogico misura 10 V
A ciascuno dei precedenti valori l’interfaccia analogica (risoluzione 12
bit) del PLC assegna i valori decimali:
0 bar = 0V = 000000000000
0,5 bar = 5 V = 100000000000
1 bar = 10 V = 111111111111
La CPU per eseguire i sui calcoli usa la notazione binaria del valore
(esempio 100000000000)
PLC
11
PLC – I/O Analogici
Informazioni disponibili per I/O analogici:
valori dei segnali da trattare
possibilità di accettare valori single-ended o differenziali
risoluzione di conversione
rappresentazione dei dati fornita
velocità di conversione dei dati
Valori tipici:
Segnali in tensione: ±5 V;
±10 V; 0~5 V
Segnali in corrente: 4~20 mA (trasmissione in corrente è meno
sensibile a disturbi elettromagnetici e cadute resistive in collegamenti
lunghi)
Modulo ingresso analogico costituito 1 ADC e 1 multiplexer
Alcuni moduli uscita hanno watchdog timer per malfunzionamenti
PLC
PLC – Modulo Alimentatore
Modulo alimentatore:
fornisce l’alimentazione elettrica stabilizzata necessaria per tutti i
moduli
robusta a microinterruzioni e fluttuazioni fornitura elettrica
trasformatore - circuito rettificatore - filtro - circuito stabilizzatore
circuito protezione da sovracorrenti e cortocircuiti
Caratteristiche:
potenza massima fornibile
possibilità connessione in parallelo
possibilità invio segnale shutdown
presenza indicatori di stato
PLC
12
PLC – Armadio
Armadio, cestello, o rack:
deve contenere i moduli ed assicurare la connessione elettrica e
meccanica (oltre che la schermatura)
architettura a bus (bus proprietario)
Caratteristiche:
numero slot
dimensioni di ingombro
modalità di fissaggio
PLC
PLC – Terminale di programmazione
Il PLC non prevede tastiere o monitor per la comunicazione col
programmatore
terminali a tastiera (per piccoli plc) con collegamento via cavo (es.
seriale) e display a cristalli liquidi
sistema di sviluppo su pc (modalità di programmazione fuori-linea)
con connessione al PLC diretta o tramite rete informatica
PLC
13
PLC – Moduli speciali
Moduli I/O remoto
Moduli per la connessione in rete
Moduli coprocessore
Moduli PID
Moduli di servo
Moduli encoder
Moduli interfaccia operatore
Moduli di backup
PLC
PLC – Classificazione
Micro
fino a 64 punti I/O (digitali); memoria fino a 2 Kword;
no architettura modulare; 1 linguaggio programmazione (limitato)
Piccoli
64-512 punti I/O(digitali + qualche analogica); memoria 4 Kword;
struttura modulare; capacità connessione in rete; + linguaggi
Medi
256-2048 punti I/O; memorie decine di Kword;
I/O remoti e moduli speciali; elevata possibilità programmazione; elevata
capacità comunicazione in rete;
Grandi
numerosi I/O; memorie da centinaia di Kword; supervisione di cella
interfacciamento PLC minori e calcolatori di gestione
PLC
14
Controllori per applicazioni generiche
Controllori per applicazioni generiche:
Monolitici, cioè realizzati da una singola scheda o addirittura da
una singolo circuito integrato
basati su bus e realizzati attraverso la combinazione di moduli con
differenti funzionalità
basati su personal computer
PLC
Controllori monolitici
Controllori che inglobano tutto ciò che serve su un’unica scheda o su
un singolo circuito integrato. (Es. dispositivi di controllo di
elettrodomestici, videoregistratori, lettori CD, stampanti, sistemi di
frenata ABS, climatizzatori …)
Un controllore monolitico possiede:
un’unità di elaborazione
una memoria non volatile che contiene i programmi
una memoria (anche volatile) per la conservazione delle variabili
un clock per generare i segnali di temporizzazione
dei dispositivi di interfaccia per l’acquisizione e la generazione di segnali
analogici e digitali
un sistema di gestione delle interruzioni
PLC
15
Controllori monolitici
La tecnologia attuale permette l’integrazione di tutti i componenti in
singoli circuiti integrati chiamati microcontrollori (system-on-chip)
I microcontrollori posso avere diverse caratteristiche:
numero di bit (da 8 a 32 bit); tipo di architettura, dimensioni memoria,
tipo di gestione degli interrupt, numero e tipo I/O
solitamente non è previsto il sistema operativo
sistema di sviluppo basato su pc (programmazione in linguaggi
assemblativi o di alto livello)
Se necessaria maggiore potenza di elaborazione o gestione I/O si può
ricorrere a controllori single-board
PLC
Controllori monolitici
Unità di processo:
processori CISC (Complex Istruction Set Computer)
processori RISC (Reduced Istruction Set Computer)
DSP (Digital Signal Processor)
Limitata (o assente) capacità di comunicazione con altri dispositivi
Interfaccia operatore ridotta (pulsanti o led)
Si prestano per soluzioni embedded
PLC
16
Controllori con architettura a bus
Adatti ad applicazioni che richiedono notevole capacità di
elaborazione, trattamento di numerosi I/O, comunicazione attraverso
reti informatiche, interfacce operatore sofisticate
Concetto di bus:
un bus è un insieme di linee elettriche, raggruppate per funzioni, che
connettono tra loro varie schede o moduli
un bus è costituito dal protocollo attraverso il quale i moduli posso usare
le linee elettriche per comunicare tra loro
un bus è definito dalle caratteristiche elettriche e meccaniche dei
connettori che servono per collegare i moduli
Le schede sono connesse al bus in parallelo
Lunghezza del bus di qualche decimetro
PLC
Controllori con architettura a bus
Modulo
Processore
Modulo
Memoria
Modulo
I/U digitali
Modulo
I/U analogici
Modulo
Gestione
Periferiche
Alimentazione
Dati
Indirizzi
Controllo
PLC
17
Controllori con architettura a bus
Moduli tipici:
modulo processore
moduli di ingresso e uscita analogici
moduli di ingresso e uscita digitali
moduli contatore ad alta velocità
moduli memoria di massa a stato solido
moduli per comunicazione su rete informatica
moduli per controllo periferiche (schermi, tastire…)
Moduli inseriti in armadi (rack) che li contengono meccanicamente e li
uniscono elettricamente attraverso un circuito stampato su cui sono
disposti i connettori
Solitamente necessario un sistema operativo
Programmazione tramite linguaggio alto livello (come il linguaggio
C); alcuni seguono standard IEC 61131-3
PLC
Controllori con architettura a bus
Caratteristiche dei bus:
dati elettrici e meccanici (livelli di segnale e disposizione fisica)
velocità di trasmissione dati
spazio indirizzabile
lunghezza dati
numero di linee di interrupt e modalità gestione
sincrono (necessita clock) - asincrono (prevede più segnali
sincronizzazione)
numero di master consentiti
legato o meno a tipologia di processore
autoconfigurazione del bus
PLC
18
Controllori con architettura a bus
Bus VME (Versa Module Europe)-IEEE 1014
linee indirizzo da16 a 64 bit
linea dati da16 a 64 bit
velocità massima trasferimento 500 MB/s
7 linee interrupt
4 livelli priorità per l’allocazione del bus
possibilità di trasferire fino a 256 word
64 linee utente
modo operativo asincrono
fino a 21 master
PLC
Controllori con architettura a bus
Bus EISA (Extended Industry Standard Architecture )
linee indirizzo 32 bit
linee dati da 8 a 32 bit
velocità massima di trasferimento 33 MB/s
6 linee di interrupt
supporto multimaster
modo operativo sincrono
Slot EISA
PLC
19
Controllori con architettura a bus
PCI (Peripheral Component Interconnect )
modo operativo sincrono
velocità massima trasferimento 132 MB/s
linea dati ed indirizzo a 32 bit
supporto multimaster
PC/104 e PC/104+
moduli connessi con connettori passanti (sandwich)
PC/104 (bus EISA)
PC/104+ (bus PCI)
PLC
Controllori basati su pc
Calcolatori general purpose
Vantaggi:
costi minori
minori professionalità richieste per l’utilizzo
ampia scelta fornitori hardware e software
semplicità manutenzione
funzionalità di base pre-istallate (interfaccia grafica, memorie di massa,
comunicazione con altri dispositivi)
Svantaggi:
limitata interfaccia di processo (non molti I/O)
non adatto ad ambienti ostili
Utilizzati per il controllo remoto
SO real-time o tradizionali.
Programmazione con linguaggi standard
Soft-PLC e Soft-CNC
PLC
20
Controllori specializzati
Controllori di macchine a controllo numerico
Regolatori PID
Controllori per motori elettrici
Controllori Specializzati
Controllori macchine CN
Macchina a controllo numerico: macchinario che esegue
lavorazioni e movimentazioni, con assi di rotazione e
traslazione controllati, dotata di un linguaggio di
programmazione ad alto livello orientato alla funzionalità
che svolge.
Es. Torni, frese, trapani, robot
Controllori Specializzati
21
Controllori macchine CN
Funzionalità dell’architettura di controllo:
controllo movimento di ogni singolo asse
generare i riferimenti (leggi orarie) per ogni asse
coordinare i movimenti degli assi
eseguire le istruzioni espresse nel linguaggio di programmazione
gestire logiche e sequenze della macchina ed altri dispositivi
interfaccia uomo-macchina per supervisione e programmazione
comunicazione con altri dispositivi
capacità di autodiagnostica
Architettura a bus:
modulo controllo posizione e velocità per ogni asse
modulo interpretazione programma e generazione traiettorie
modulo controllo logico/sequenziale macchina ed altri dispositivi
modulo interfaccia operatore
Controllori Specializzati
Regolatori PID
Regolatore Proporzionale – Integrale – Derivativo
Controllori Specializzati
22
Controllori per motori elettrici
Controllo di coppia o velocità (azionamenti elettrici) o controllo di
posizione (controllo d’asse)
Funzioni principali del sistema di controllo del moto:
acquisire informazioni sulle variabili di stato elettriche e meccaniche
attraverso misure o stime
implementazione algoritmo di controllo del moto e logica gestione motore
conversione di potenza
ricezione comandi di moto da altri dispositivi
Funzioni secondarie:
visualizzazione e comunicazione dello stato e segnali allarme
monitoraggio variabili
gestione condizioni allarme
esecuzione procedure di test per la regolazione dei parametri
Controllori Specializzati
23