CARTA INTESTATA ISTITUTO
ALLEGATO B - CAPITOLATO TECNICO
LABORATORIO MOBILE PROFESSIONALIZZANTE PER
MECCATRONICA
PER SCUOLE SUPERIORI
Apparati richiesti
QUANTITA’
DESCRIZIONE
1
BANCO MOBILE SU RUOTE
Telaio portante e gambe in tubolare di acciaio. Quattro ruote di cui due con freno. Piano di
lavoro in legno bilaminato con spigoli smussati. Parti metalliche verniciate a forno con
trattamento antiruggine. Dimensioni 2.000 x 1.000 x 860 mm.
NOTEBOOK
di ultima generazione di marca internazionale:
Sistema Operativo Windows 8.1 64-bit - Italiano / Inglese, Processore Intel Celeron N2830 /
2.16 GHz (2.41 GHz) / 1 MB Cache, Memory 2 GB DDR3L, Memoria 500 GB HDD / 5400
rpm, Schermo 15.6” retroilluminazione a LED 1366 x 768 / HD, Scheda grafica Intel HD
Graphics
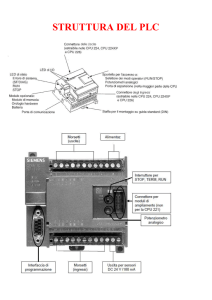
PLC TRAINING PANEL CON SOFTWARE DI PROGRAMMAZIONE PLC
Il trainer realizzato con componenti industriali che deve consentire lo sviluppo di una
sperimentazione solida e ad alto contenuto di conoscenze sulla programmazione dei PLC e
la soluzione delle più complesse problematiche legate all’automazione con particolare
riferimento al controllo di processo con software HMI e alla comunicazione in reti industriali.
Esso deve mettere a disposizione ingressi e uscite digitali e analogiche accessibili su
boccole di Ø = 4 mm e Ø = 2 mm inserite sul pannello frontale. Le uscite digitali devono
essere disponibili come uscite a relè o a transistor. Lo stato logico degli ingressi e delle
uscite digitali deve essere visualizzato da diodi LED presenti a bordo del PLC. Tramite
potenziometri rotativi deve essere possibile regolare il livello delle tensioni o correnti agli
ingressi analogici. Il pannello frontale del trainer deve riportare la rappresentazione sinottica
serigrafata degli schemi e dei componenti interni all’apparecchiatura, completa di ogni
minima nomenclatura. Un voltmetro digitale a 3 e 1/2 cifre visualizza la tensione degli
ingressi o delle uscite analogiche in base alla posizione di un selettore rotativo. Il software di
programmazione in ambiente WIN (32/64 Bit), consente lo sviluppo di programmi di
esercitazione con PLC nei più diffusi linguaggi dell’automazione industriale: KOP, FUP
secondo la norma IEC 61131-3. Completo di cavo d’interfaccia ethernet. Il PLC inoltre deve
essere predisposto per il collegamento a reti industriali di tipo ProfiNet. Infine, lo svolgimento
delle esercitazioni deve essere guidato efficacemente dalla manualistica teoricosperimentale fornita con il trainer.
MODULO NASTRO TRASPORTATORE
Modulo progettato per il trasporto di pezzi, nelle due direzioni, lungo un asse lineare. Il nastro
trasportatore deve essere mosso da un motore in CC, controllato da dei relè di marcia
diretta/inversa per il movimento del nastro. Un sensore a fibra ottica deve permettere di
rilevare il passaggio dei pezzi sul nastro. Assemblato su di una struttura d’alluminio profilato
facilmente trasportabile. Il controllo e la supervisione del modulo deve essere svolto da PLC
collegato al sistema tramite una scheda d’interfaccia I/O. Lo sviluppo delle esercitazioni,
inerenti all’automazione del modulo, deve essere reso possibile dall’utilizzo del software di
programmazione del PLC.
1
1
1
pag. 1
CARTA INTESTATA ISTITUTO
1
1
1
1
Il modulo deve permettere di svolgere il seguente programma di formazione: Principi di
controlli elettrici: il motore in CC; Operazioni con il nastro trasportatore; Il sensore a fibra
ottica.
MODULO ROBOT
Il modulo robot deve realizzare la funzione di trasporto dei pezzi in un’area circolare.
Costituito da un cilindro per la movimentazione alto/basso, un cilindro per la movimentazione
avanti/dietro, una ventosa per la presa del pezzo e da un motorino con encoder accoppiato
ad un riduttore per le operazioni di rotazione. La presenza dei sensori REED sul movimento
dei cilindri e di un sensore induttivo per la rotazione devono permettere di identificare i
movimenti del robot. Il controllo del modulo deve essere svolto da PLC collegato al sistema
tramite un box d’interfaccia I/O. Lo sviluppo delle esercitazioni inerenti all’automazione del
modulo deve essere reso possibile dall’utilizzo del software di programmazione del PLC.
Il modulo deve permettere di svolgere il seguente programma di formazione: Principi di
elettro-pneumatica; Funzionamento del circuito di generazione del vuoto accoppiato ad una
ventosa; Funzionamento delle elettrovalvole; Funzionamento del sensore REED e induttivo.
SIMULATORE DI PARCHEGGIO A DUE PIANI
Realizzato su contenitore metallico da tavolo. L’apparecchiatura deve simulare la
costituzione di un sistema di controllo di entrata, uscita e giacenza di autoveicoli per un
garage a 2 piani, con capienza massima di 100 autoveicoli.
I vari elementi del circuito elettrico da controllare mediante PLC devono essere fissati su un
pannello di alluminio serigrafato che riproduce la struttura dell’edificio con le relative
segnalazioni di ingresso, uscita e giacenza.
Tutte le lampade di segnalazione devono essere collegate in modo indipendente ad una
morsettiera costituita da boccole unificate di tipo didattico con foro diam. 4 mm. Deve
includere il sistema di visualizzazione digitale, che permette di controllare il traffico in entrata
ed uscita, come pure la quantità di autoveicoli in parcheggio, sia nel I° piano, nel II° piano
che totale.
SIMULATORE DI SEMAFORO INTELLIGENTE
Realizzato su contenitore metallico da tavolo. L’apparecchiatura deve simulare la
costituzione di un sistema semaforico per un incrocio di 2 strade, una delle quali con
possibilità di svincolo a destra indipendente.
I vari elementi del circuito elettrico, da controllare mediante PLC devono essere fissati su un
pannello di alluminio serigrafato, che riproduce l’incrocio delle strade, con i relativi punti
semaforici. Tutte le lampade di segnalazione devono essere collegate in modo indipendente
ad una morsettiera costituita da boccole unificate di tipo didattico, con foro diam. 4 mm.
Devono essere inoltre presenti sull’apparecchiatura degli elementi di comando per gestire
direttamente dal simulatore alcune funzioni di regolazione dei tempi di ciclo o determinare
manualmente il funzionamento del sistema.
SIMULATORE DI AUTOLAVAGGI
Contenitore metallico da tavolo, con struttura in lamiera d’acciaio trattata chimicamente e
verniciata a più mani con vernice epossidica. Pannello sinottico in alluminio serigrafato.
L’apparecchiatura deve simulare un tunnel di autolavaggio. I vari elementi devono essere
riprodotti su un pannello di alluminio serigrafato.
Le “corse” meccaniche, delle parti in movimento costituenti l’automazione, devono essere
riprodotte con barre a 10 led che pilotano i relativi finecorsa di controllo.
Tutte le lampade di segnalazione dello stato operativo e i dispositivi di comando della
macchina devono essere collegati a boccole unificate di tipo didattico per spinotti diametro 4
mm, cosicché l’utilizzatore può scegliere il tipo di collegamento tra i vari elementi e il PLC, in
funzione del programma di gestione.
pag. 2
CARTA INTESTATA ISTITUTO
1
1
COMPRESSORE SILENZIATO
Capacità: 9lt. Portata: 30lt/min. Pressione operativa: 8bar. Valvola di sicurezza. Rumorosità:
40dB/m. Potenza: 0.25 hp.
FORMAZIONE ALL’USO DELLE ATTREZZATURE FORNITE
Corso di addestramento all’utilizzo delle attrezzature fornite, riservato al personale che
gestirà gli apparati.
pag. 3