GRUPPO DI LAVORO N°8:
OGGETTO.
Determinare la costante elastica della molla con relativo
errore di misura, verificare che il moto sperimentale
può essere trattato come armonico semplice, e verificare
le sue principali proprietà (isocronia, sfasamenti).
Calcolare il periodo del nostro moto con il relativo
errore, eseguire i grafici accelerazione verso posizione e
velocità verso posizione, da uno di questi ricavare la
rigidità della molla k, e confrontarla con quella trovata
per via statica. Esecuzione del grafico dell’energia totale
in funzione del tempo, ed interpretazione dei grafici
forza vero posizione e forza verso accelerazione, e
rappresentare graficamente le forze che agiscono sul
sistema individuando il significato della forza misurata
dal sensore di forza.
relazione 1
1
INDICE.
3
4-7
7
8
9-14
15-18
19-22
23
24-26
27
28
29
30
31-33
34
35
36-37
37-38
Descrizione dell’apparato sperimentale utilizzato nell’esperienza; operazioni
effettuate durante l’esperienza.
Dati sperimentali; analisi del comportamento statico della molla.
Grafico della elongazione verso la massa.
Grafico della elongazione verso la massa con retta di regressione.
Analisi del comportamento dinamico della molla
Grafici posizione verso tempo e velocità-accelerazione verso tempo di tutti i
comportamenti dinamici.
Verificare che il moto può essere trattato come armonico semplice.
Grafico del confronto tra l’andamento sperimentale e quello teorico,
determinazione del periodo del moto armonico con relativo errore.
Studio degli sfasamenti.
Grafico della velocità verso la posizione.
Grafico accelerazione verso la posizione.
Grafico dell’accelerazione verso la posizione depurato.
Grafico della velocità in modulo verso la posizione.
Determinazione dell’energia totale in funzione del tempo.
Grafico dell’energia totale in funzione del tempo.
Grafico dell’energia totale in funzione del tempo con l’indicazione dell’energia
totale media.
Grafico forza verso posizione e forza verso accelerazione, con interpretazione.
Rappresentazione grafica delle forze.
PROGRAMMI UTILIZZATI.
Per eseguire questa relazione sono stati utilizzati i seguenti programmi:
• Microsoft Excel→per quanto concerne tutta la parte numerica della relazione;
• Microsoft Word→per l’impaginazione della relazione, e per la scrittura del testo;
• Microcal Origin→per quanto concerne i grafici e il calcolo delle rette di regressione lineare;
• AutoCAD 14→per la rappresentazione grafica delle forze.
relazione 1
2
SVOLGIMENTO DELLA RELAZIONE.
• Descrizione dell’apparato sperimentale utilizzato nell’esperienza.
Il moto della molla è stato rilevato tramite l’ausilio di un sonar operante nel campo degli
ultrasuoni, il suo principio di funzionamento è di rilevare il tempo di andata e di ritorno
dell’impulso, conoscendo la velocità del suono a temperatura ambiente, che è pari a
343m/s. Tale velocità varia al variare della temperatura e delle condizioni ambientali,
quindi questa variabilità può determinare un certo grado di errore nella misurazione. Gli
impulsi che vengono messi dal sonar non sono direzionali ma divergono con una ampiezza
di 20° rispetto all’asse, quindi durante le operazioni di misurazione non ci devono essere
oggetti o persone nelle vicinanze dell’apparato. Il grado di errore del sonar sulla misura
effettuata è dell’ordine del millimetro. Oltre a tale parametro si deve tenere conto che il
sonar ha dei limiti di misurazione, infatti, l’oggetto da rilevare deve essere posto ad una
distanza compresa tra i 40cm e i 6m dal sonar, quindi noi durante le operazioni di
rilevamento dovevamo tenere conto soprattutto della prima limitazione. L’oggetto da
rilevare era un contenitore plastico, fissato tramite l’ausilio di fili ad una molla, che a sua
volta era agganciata al sensore di forza, il tutto era sostenuto da un tubo in alluminio
fissato al tavolo, al quale era fissato un’asta orizzontale. Il sensore di forza doveva essere
agganciato il più possibile vicino al montante, per evitare che durante l’oscillazione della
molla, entrasse in oscillazione tutto il sistema di sostegno, con la conseguente creazione di
una composizione di motti oscillatori, che non è certamente la situazione voluta. Tramite
l’aiuto di un filo a piombo il sonar è stato posizionato verticalmente al di sotto del cestello,
questo per evitare possibili errori di misurazione. Per quanto concerne il sensore di forza
abbiamo soltanto fatto attenzione che il commutatore posto posteriormente fosse
posizionato nella posizione ±10N, in quanto per la nostra esperienza abbiamo utilizzato
masse minori a un Kg. Il sensore di forza e il sonar sono stati collegati ad un’interfaccia,
che aveva il compito di salvare ed elaborare i dati provenienti dai due sensori.
• Operazioni effettuate durante l’esperienza.
La prima operazione è stata di configurare l’interfaccia per raccogliere i dati provenienti dai
due sensori. Dopo di che si è rilevata la messa del cestello e della molla per completezza
sperimentale anche se noi consideriamo la massa della molla trascurabile, o meglio molto
minore delle masse che andremmo ad applicare. La presa dati è partita dal
comportamento statico della molla, utilizzando 12 rilevazioni ovviamente con 12 masse
diverse a partire da 40g fino a 480g, questo perché la molla che abbiamo utilizzato poteva
reggere fino a 500g, ogni rilevazione è costituita da dieci misurazioni ottenute ad intervalli
di 0.5s per 5 secondi. In questa fase dell’esperienza si doveva fare attenzione che la
massa appesa alla molla fosse il più possibile immobile, in modo da ottenere una
rilevazione il più possibile fedele. La seconda parte dell’esperienza è consistita nel rilevare
il moto oscillatorio della molla con una massa di 250g, adatta alla nostra molla. Per
ottenere una moltitudine di dati sufficiente per l’analisi del comportamento oscillatorio
della molla, abbiamo fatto 4 prese dati. Ogni presa dati è costituita da 100 misurazioni
rilevate ad intervalli di 0.04s per 4s, di queste misurazioni ne abbiamo fatto calcolare le
derivate prime (velocità) e seconde (accelerazione) dalla stessa calcolatrice. In questa fase
dell’esperienza si doveva fare attenzione che il moto oscillatorio si svolga il più possibile
verticalmente, poi ad ogni rilevazione si controllava come venivano i vari grafici
direttamente dalla calcolatrice, soprattutto quello inerente all’accelerazione verso il tempo,
che possiamo definire il più problematico, in quanto le operazioni di derivazione hanno un
effetto alberante. Le prese dati che sono risultate migliori, sono state salvate nella
calcolatrice, dopo di che, questi file sono stati trasferiti al computer e ai floppy, per poterli
analizzare e studiare.
relazione 1
3
• Dati sperimentali.
Massa molla: 4.6g
Massa cestello: 10.1g
Riferimento: 0.614m
Il riferimento è stato utilizzato per determinare le varie elongazioni della molla, in modo
appropriato, tale dato è stato utilizzato anche per l’analisi del comportamento dinamico
della molla. Le masse sono state rilevate con l’ausilio di una bilancia elettronica con un
grado di errore nell’ordine di un decimo di grammo.
ANALISI DEL COMPORTAMENTO STATICO DELLA MOLLA.
L’obbiettivo di questa parte della relazione è di trovare la costate elastica k(N/m), con il
suo relativo errore. Nella seguente tabella sono riportate le 12 masse utilizzate (più la tara
che è costituita dal cestello che comunque deve essere considerato), e poi tutta una serie
di dati statistici che si riferiscono ad ogni singola presa dati per ogni massa presa in
considerazione. Per maggiore chiarezza è meglio analizzare quali sono i dati statistici presi
in considerazione, per prima cosa abbiamo la media aritmetica delle 10 misurazioni
effettuate. Nella terza colona sono riportati gli scarti dalla media definiti come la differenza
tra il valore misurato è la media. Dopo di che è stata determinata la varianza che è
definita come la somma degli scarti al quadrato diviso il numero delle misurazioni. Gli
ultimi due parametri statistici presi in considerazione sono forse i più fondamentali: lo
scarto quadratico medio definito come la radice quadrata della varianza, e l’errore della
media definito dalla relazione seguente δ/√n, dove δ è lo scarto quadratico medio, ed n è il
numero delle misurazioni.
SCARTI
MASSE
Scarti dalla
POSIZIONE
DATI STATISTICI
DALLA
APPLICATE+
media al qua.
(m).
MEDIA (m).
TARA (Kg).
0,007
-0,0008
0,00000064
MEDIA (m).
0,008
0,0002
0,00000004
0,0078
0,008
0,0002
0,00000004
VARIANZA (m)
0,008
0,0002
0,00000004
0,0000004
0,007
-0,0008
0,00000064
S.Q.M. (m)
0,0501
0,008
0,0002
0,00000004
0,0006
0,009
0,0012
0,00000144
ERRORE DELLA MEDIA (m)
0,008
0,0002
0,00000004
0,0002
0,007
-0,0008
0,00000064
MEDIA+ERRORE (m).
0,008
0,0002
0,00000004
0,0078+0,0002
0,022
-0,0009
0,00000081
MEDIA (m).
0,023
0,0001
0,00000001
0,0229
0,023
0,0001
0,00000001
VARIANZA (m).
0,023
0,0001
0,00000001
0,0000001
0,023
0,0001
0,00000001
S.Q.M. (m).
0,0901
0,023
0,0001
0,00000001
0,0003
0,023
0,0001
0,00000001
ERRORE DELLA MEDIA (m)
0,023
0,0001
0,00000001
0,0001
0,023
0,0001
0,00000001
MEDIA+ERRORE (m).
0,023
0,0001
0,00000001
0,0229+0,0001
0,1301
0,037
0,0000
0,00000000
MEDIA (m).
relazione 1
4
0,1701
0,2101
0,2501
0,2901
relazione 1
0,037
0,037
0,037
0,037
0,037
0,037
0,037
0,037
0,037
0,051
0,052
0,051
0,052
0,051
0,052
0,051
0,052
0,052
0,052
0,066
0,067
0,066
0,066
0,066
0,066
0,066
0,066
0,066
0,066
0,080
0,081
0,081
0,081
0,081
0,081
0,081
0,081
0,081
0,081
0,095
0,095
0,095
0,096
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
0,0000
-0,0006
0,0004
-0,0006
0,0004
-0,0006
0,0004
-0,0006
0,0004
0,0004
0,0004
-0,0001
0,0009
-0,0001
-0,0001
-0,0001
-0,0001
-0,0001
-0,0001
-0,0001
-0,0001
-0,0009
0,0001
0,0001
0,0001
0,0001
0,0001
0,0001
0,0001
0,0001
0,0001
-0,0003
-0,0003
-0,0003
0,0007
0,00000000
0,00000000
0,00000000
0,00000000
0,00000000
0,00000000
0,00000000
0,00000000
0,00000000
0,00000036
0,00000016
0,00000036
0,00000016
0,00000036
0,00000016
0,00000036
0,00000016
0,00000016
0,00000016
0,00000001
0,00000081
0,00000001
0,00000001
0,00000001
0,00000001
0,00000001
0,00000001
0,00000001
0,00000001
0,00000081
0,00000001
0,00000001
0,00000001
0,00000001
0,00000001
0,00000001
0,00000001
0,00000001
0,00000001
0,00000009
0,00000009
0,00000009
0,00000049
0,037
VARIANZA (m).
0,0000000
S.Q.M. (m).
0,0000
ERRORE DELLA MEDIA (m)
0,0000
MEDIA+ERRORE (m).
0,037+0,000
MEDIA (m).
0,0516
VARIANZA (m).
0,0000002
S.Q.M. (m).
0,0005
ERRORE DELLA MEDIA (m)
0,0002
MEDIA+ERRORE (m).
0,0516+0,0002
MEDIA (m).
0,0661
VARIANZA (m).
0,0000001
S.Q.M. (m).
0,0003
ERRORE DELLA MEDIA (m)
0,0001
MEDIA+ERRORE (m).
0,0661+0,0001
MEDIA (m).
0,0809
VARIANZA (m).
0,0000001
S.Q.M. (m).
0,0003
ERRORE DELLA MEDIA (m)
0,0001
MEDIA+ERRORE (m).
0,0809+0,0001
MEDIA (m).
0,0953
VARIANZA (m).
0,0000002
5
0,3301
0,3701
0,4101
0,4501
relazione 1
0,095
0,095
0,095
0,096
0,095
0,096
0,110
0,110
0,110
0,110
0,110
0,111
0,111
0,111
0,110
0,111
0,126
0,126
0,125
0,126
0,126
0,125
0,126
0,127
0,125
0,126
0,139
0,139
0,139
0,140
0,139
0,139
0,140
0,139
0,139
0,139
0,154
0,154
0,154
0,153
0,153
0,154
0,153
-0,0003
-0,0003
-0,0003
0,0007
-0,0003
0,0007
-0,0004
-0,0004
-0,0004
-0,0004
-0,0004
0,0006
0,0006
0,0006
-0,0004
0,0006
0,0002
0,0002
-0,0008
0,0002
0,0002
-0,0008
0,0002
0,0012
-0,0008
0,0002
-0,0002
-0,0002
-0,0002
0,0008
-0,0002
-0,0002
0,0008
-0,0002
-0,0002
-0,0002
0,0005
0,0005
0,0005
-0,0005
-0,0005
0,0005
-0,0005
0,00000009
0,00000009
0,00000009
0,00000049
0,00000009
0,00000049
0,00000016
0,00000016
0,00000016
0,00000016
0,00000016
0,00000036
0,00000036
0,00000036
0,00000016
0,00000036
0,00000004
0,00000004
0,00000064
0,00000004
0,00000004
0,00000064
0,00000004
0,00000144
0,00000064
0,00000004
0,00000004
0,00000004
0,00000004
0,00000064
0,00000004
0,00000004
0,00000064
0,00000004
0,00000004
0,00000004
0,00000025
0,00000025
0,00000025
0,00000025
0,00000025
0,00000025
0,00000025
S.Q.M. (m).
0,0005
ERRORE DELLA MEDIA (m)
0,0001
MEDIA+ERRORE (m).
0,0953+0,0001
MEDIA (m).
0,1104
VARIANZA (m).
0,0000002
S.Q.M. (m).
0,0005
ERRORE DELLA MEDIA (m)
0,0002
MEDIA+ERRORE (m).
0,1104+0,0002
MEDIA (m).
0,1258
VARIANZA (m).
0,0000004
S.Q.M. (m).
0,0006
ERRORE DELLA MEDIA (m)
0,0002
MEDIA+ERRORE (m).
0,1258+0,0002
MEDIA (m).
0,1392
VARIANZA (m).
0,0000002
S.Q.M. (m).
0,0004
ERRORE DELLA MEDIA (m)
0,0001
MEDIA+ERRORE (m).
0,1392+0,0001
MEDIA (m).
0,1535
VARIANZA (m).
0,0000003
S.Q.M. (m).
0,0005
ERRORE DELLA MEDIA (m)
6
0,153
0,154
0,153
0,168
0,169
0,168
0,169
0,169
0,168
0,169
0,168
0,169
0,169
0,4901
-0,0005
0,0005
-0,0005
-0,0006
0,0004
-0,0006
0,0004
0,0004
-0,0006
0,0004
-0,0006
0,0004
0,0004
0,00000025
0,00000025
0,00000025
0,00000036
0,00000016
0,00000036
0,00000016
0,00000016
0,00000036
0,00000016
0,00000036
0,00000016
0,00000016
0,0002
MEDIA+ERRORE (m).
0,1535+0,0002
MEDIA (m).
0,1686
VARIANZA (m).
0,0000002
S.Q.M. (m).
0,0005
ERRORE DELLA MEDIA (m)
0,0002
MEDIA+ERRORE (m).
0,1686+0,0002
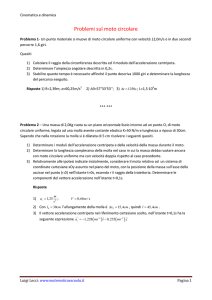
Da tale analisi puramente numerica, si può costruire un grafico elongazione-massa, dal
quale si possono fare alcune interessanti considerazioni.
ELONGAZIONE VERSO MASSA.
0,18
0,16
Elongazione (m).
0,14
0,12
0,10
0,08
0,06
0,04
0,02
0,00
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
0,50
0,55
Massa (Kg).
Come si può immediatamente osservare abbiamo considerato anche la situazione nella
quale la molla sia completamente a riposo, quindi la sua elongazione è nulla. Quindi da
questo abbiamo la formazione di un “ginocchio” nell’andamento del grafico, in altri termini
la molla in tale zona non rispetta la legge di Hooke, che al contrario afferma che la
relazione 1
7
deformazione deve essere proporzionale al carico agente, ma ovviamente questo vale per
una molla ideale, in quanto in una molla reale possono entrare dei fattori intrinseci alla
molla stessa per esempio la sua massa che non è certo trascurabile, la quale potrebbe
provocare un allungamento iniziale della molla. Quindi per la nostra analisi andremmo a
considerare solo quella parte di grafico che rispetta in modo approssimativo ma
sufficientemente adeguato la legge di Hooke che è stata evidenziata con un rettangolo
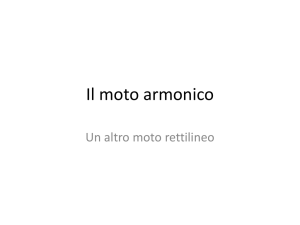
rosso. In questa parte del grafico determineremmo una retta di regressione lineare, dalla
quale ci determineremmo la costante elastica k con il suo relativo errore.
ELONGAZIONE VERSO MASSA.
0,18
0,16
Elongazione (m).
0,14
0,12
0,10
0,08
0,06
0,04
0,02
0,00
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
0,50
0,55
Massa (Kg).
Nella tabella seguente sono indicate le caratteristiche della retta di regressione lineare, in
altri termini i parametri a e b con i rispettivi errori μa e μb, la correlazione R, che
rappresenta il grado di dipendenza di due serie numeriche legate da una funzione, in
questo caso lineare, il suo valore al massimo può essere 1 che rappresenta la perfetta
correlazione e dipendenza, comunque in una rilevazione sperimentale discreta il suo valore
dovrebbe essere compreso tra lo 0.95 e l’1, anche se quest’ultimo è impossibile
raggiungerlo in una osservazione sperimentale. Dopo di che nella tabella seguente è
indicato il valore di k, determinato a partire dal coefficiente angolare della retta di
regressione b, in quanto la legge che regola il nostro sistema statico e la seguente:
kx=mg, dove x è la elongazione, m è la massa applicata alla molla e g è l’accelerazione di
gravità che noi supponiamo priva di errore e uguale a 9.806m/s2. Quindi k=g/b, dove b è
la pendenza della retta di regressione e rappresenta il rapporto x/m. L’errore Δk è stato
determinato a partire dalla seguente relazione: Δk/k=Δb/b.
relazione 1
8
RETTA DI REGRESSIONE
y=a+bx.
μa (m).
PARAMETRO.
VALORE.
a
-0,0104
b
0,3652
y=-0,0104+0,3652x
CORRELAZIONE.
0,99997
0,0003
μb (m/Kg).
Grandezza+errore.
Errore definito sul parametro a.
-0,0104+0,0003
Errore definito sul parametro b.
0,0009
0,3652+0,0009
COSTANTE ELASTICA k (N/m).
GRANDEZZE
VALORE NUMERICO
26,85
k (N/m).
0,06
Δk (N/m).
26,85+0,06
k+Δk (N/m).
ANALISI DEL COMPORTAMENTO DINAMICO DELLA MOLLA.
Qui di seguito riportiamo una lunga serie di dati, inerenti alle quattro rilevazioni effettuate
del moto oscillatorio della molla. Per ogni presa dati sono riportati tutti i parametri rilevati
durante l’esperienza e quelli determinati mediante le operazioni di derivazione. Quindi
abbiamo gli intervalli di tempo nella prima colonna, la forza rilevata dal sensore di forza
nella seconda ed infine abbiamo la posizione, questa è la serie di dati proveniente
direttamente dai sensori dello strumento; la velocità e l’accelerazione possono essere
determinate tramite il calcolo delle derivate direttamente dalla calcolatrice, ma ho
osservato che nei grafici inerenti all’accelerazione risultavano visibilmente delle situazioni
che non potevano altro che essere degli artefatti di calcolo delle derivate, in quanto non
potevano certo rapprese4ntare una situazione reale. Quindi le accelerazioni e le velocità
sono state determinate tramite l’ausilio del foglio di elettronico di calcolo (Origin), il quale
con molta probabilità ha una implementazione di calcolo delle derivate sensibilmente
migliore della calcolatrice. In definitiva i grafici risultano più vicini alle aspettative, anche
se comunque rimangono presenti dei “difetti” che molto probabilmente sono legati alla
situazione sperimentale, infatti, la molla potrebbe assumere un moto non perfettamente
verticale, quindi abbiamo la presenza di accelerazioni di natura tangenziale, oppure il
cestello ed i fili con cui esso è collegato alla molla, ha anch’esso un comportamento
elastico durante l’oscillazione, ed infine non è esclusa l’ipotesi di qualche errore di
rilevazione da parte dell’interfaccia, dovuto a cause ignote. La massa utilizzata per questa
parte dell’esperienza è pari alla metà della portata massima della molla (500g), quindi
250g. Gli obiettivi di questa parte della relazione sono innumerevoli e verranno illustrati via
via.
relazione 1
9
COMPORTAMENTO DINAMICO 1.
TEMPO FORZA POSIZ. VELOC.
(s).
(N).
(m).
(m/s).
0,00
2,50385 0,53116 0,62470
0,04
1,82778 0,55615 0,56571
0,08
1,27137 0,57642 0,40955
0,12
0,91838 0,58891 0,18395
0,16
0,81068 0,59113 -0,06595
0,20
0,97222 0,58364 -0,30195
0,24
1,39103 0,56698 -0,48938
0,28
1,97735 0,54449 -0,60391
0,32
2,64744 0,51867 -0,61779
0,36
3,30556 0,49506 -0,52407
0,40
3,82607 0,47674 -0,35054
0,44
4,13120 0,46702 -0,14925
0,48
4,16709 0,46480 0,12494
0,52
3,90983 0,47702 0,38179
0,56
3,43120 0,49534 0,52409
0,60
2,79701 0,51894 0,61085
0,64
2,12094 0,54421 0,59696
0,68
1,51068 0,56670 0,47549
0,72
1,06197 0,58225 0,27766
0,76
0,84658 0,58891 0,04165
0,80
0,90043 0,58558 -0,19784
0,84
1,21154 0,57309 -0,41649
0,88
1,72009 0,55226 -0,56226
0,92
2,36624 0,52811 -0,60739
0,96
3,04231 0,50367 -0,56572
1,00
3,61068 0,48285 -0,42342
1,04
4,01154 0,46980 -0,23254
1,08
4,15513 0,46425 0,00694
1,12
4,01752 0,47035 0,27071
1,16
3,63461 0,48590 0,47203
1,20
3,06624 0,50811 0,59350
1,24
2,40214 0,53338 0,63167
1,28
1,76197 0,55865 0,55185
1,32
1,24145 0,57753 0,37136
1,36
0,93034 0,58836 0,14230
1,40
0,87051 0,58891 -0,10411
1,44
1,07393 0,58003 -0,32972
1,48
1,51068 0,56254 -0,50674
1,52
2,09701 0,53949 -0,59696
1,56
2,76709 0,51478 -0,59002
relazione 1
ACCELE.
(m/s2).
-1,47469
-2,68938
-4,77203
-5,94375
-6,07375
-5,29281
-3,77453
-1,60516
0,99797
3,34063
4,68531
5,94344
6,63797
4,98937
2,86328
0,91094
-1,69203
-3,99125
-5,42297
-5,94375
-5,72672
-4,55531
-2,38625
-0,04328
2,29953
4,16484
5,37953
6,29062
5,81359
4,03484
1,99562
-0,52063
-3,25391
-5,11937
-5,94344
-5,90031
-5,03281
-3,34047
-1,04109
1,34484
COMPORTAMENTO DINAMICO 2.
TEMPO FORZA POSIZ. VELOC ACCELE.
(s).
(N).
(m).
(m/s).
(m/s2).
0,00
1,36111 0,56865 -0,5970 -0,78062
0,04
1,97137 0,54477 -0,6282 -0,47687
0,08
2,6594 0,51839 -0,6352 1,04156
0,12
3,32949 0,49395 -0,5449 3,25391
0,16
3,87393 0,47480 -0,3748 5,03250
0,20
4,19102 0,46397 -0,1423 6,24734
0,24
4,23291 0,46341 0,1250 6,37750
0,28
3,97564 0,47396 0,3679 5,20609
0,32
3,48504 0,49284 0,5414 3,38391
0,36
2,83291 0,51728 0,6386 0,99781
0,40
2,13889 0,54393 0,6213 -1,77875
0,44
1,51068 0,56698 0,4963 -4,12156
0,48
1,04402 0,58364 0,2915 -5,33625
0,52
0,82265 0,59030 0,0694 -6,16047
0,56
0,86453 0,58919 -0,2013 -6,50750
0,60
1,17564 0,57420 -0,4512 -4,68562
0,64
1,70812 0,55310 -0,5762 -2,25609
0,68
2,36624 0,52811 -0,6317 -0,13000
0,72
3,06026 0,50256 -0,5866 2,42953
0,76
3,65855 0,48118 -0,4373 4,59875
0,80
4,07735 0,46758 -0,2187 5,90016
0,84
4,24487 0,46369 0,0347 6,20375
0,88
4,10726 0,47035 0,2777 5,55328
0,92
3,71838 0,48590 0,4790 4,12172
0,96
3,12607 0,50867 0,6074 1,90891
1,00
2,45 0,53449 0,6317 -0,69438
1,04
1,77991 0,55920 0,5518 -3,08031
1,08
1,24145 0,57864 0,3853 -4,94563
1,12
0,90641 0,59002 0,1562 -6,11719
1,16
0,8406 0,59113 -0,1041 -6,20406
1,20
1,03803 0,58169 -0,3401 -5,16266
1,24
1,48077 0,56392 -0,5171 -3,51406
1,28
2,09103 0,54032 -0,6213 -1,34484
1,32
2,78504 0,51422 -0,6247 1,25828
1,36
3,4312 0,49034 -0,5206 3,60078
1,40
3,93376 0,47258 -0,3367 5,37953
1,44
4,19701 0,46341 -0,0902 6,37750
1,48
4,18504 0,46536 0,1735 6,16047
1,52
3,89786 0,47730 0,4026 4,81562
1,56
3,38333 0,49756 0,5588 2,77656
10
1,60
1,64
1,68
1,72
1,76
1,80
1,84
1,88
1,92
1,96
2,00
2,04
2,08
2,12
2,16
2,20
2,24
2,28
2,32
2,36
2,40
2,44
2,48
2,52
2,56
2,60
2,64
2,68
2,72
2,76
2,80
2,84
2,88
2,92
2,96
3,00
3,04
3,08
3,12
3,16
3,20
3,24
3,28
3,32
3,38333
3,86795
4,11325
4,08932
3,80214
3,30556
2,67137
2,01923
1,43889
1,04402
0,88248
0,97820
1,32521
1,86367
2,50983
3,15000
3,68846
4,02350
4,11325
3,93376
3,51496
2,92863
2,27650
1,66624
1,19359
0,94231
0,94231
1,18761
1,65427
2,24658
2,89872
3,47906
3,89188
4,08333
3,99957
3,67650
3,15598
2,53376
1,90555
1,37906
1,03803
0,93632
1,07992
1,45684
relazione 1
0,49229
0,47563
0,46758
0,46952
0,48118
0,50062
0,52394
0,54837
0,56948
0,58281
0,58780
0,58281
0,56837
0,54754
0,52366
0,49978
0,48118
0,47008
0,46674
0,47646
0,49312
0,51561
0,53977
0,56198
0,57920
0,58752
0,58614
0,57531
0,55698
0,53366
0,50950
0,48868
0,47424
0,46841
0,47258
0,48590
0,50395
0,52950
0,55282
0,57170
0,58364
0,58642
0,57920
0,56392
-0,48937
-0,30889
-0,07636
0,17006
0,38872
0,53450
0,59696
0,56919
0,43038
0,22907
0,00000
-0,24295
-0,44079
-0,55879
-0,59696
-0,53102
-0,37136
-0,18048
0,07982
0,32971
0,48937
0,58309
0,57961
0,49285
0,31930
0,08676
-0,15271
-0,36443
-0,52060
-0,59350
-0,56226
-0,44077
-0,25336
-0,02082
0,21865
0,39219
0,54491
0,61085
0,52755
0,38525
0,18395
-0,05552
-0,28114
-0,45120
3,51422
5,16266
5,98688
5,81359
4,55547
2,60297
0,43359
-2,08234
-4,25141
-5,37969
-5,90031
-5,50984
-3,94797
-1,95219
0,34703
2,82000
4,38187
5,63984
6,37734
5,11937
3,16719
1,12797
-1,12797
-3,25391
-5,07609
-5,90016
-5,63984
-4,59859
-2,86344
-0,52078
1,90906
3,86125
5,24937
5,90016
5,16266
4,07828
2,73328
-0,21703
-2,82000
-4,29500
-5,50969
-5,81359
-4,94594
-3,38375
1,60
1,64
1,68
1,72
1,76
1,80
1,84
1,88
1,92
1,96
2,00
2,04
2,08
2,12
2,16
2,20
2,24
2,28
2,32
2,36
2,40
2,44
2,48
2,52
2,56
2,60
2,64
2,68
2,72
2,76
2,80
2,84
2,88
2,92
2,96
3,00
3,04
3,08
3,12
3,16
3,20
3,24
3,28
3,32
2,73718
2,04316
1,45085
1,03803
0,85855
0,94829
1,30128
1,85171
2,52179
3,19188
3,74829
4,12521
4,22094
4,04145
3,61068
3,00641
2,33034
1,69615
1,19957
0,93034
0,91838
1,16966
1,64829
2,25855
2,93462
3,53291
3,97564
4,17906
4,11325
3,7782
3,24573
2,60556
1,95342
1,40897
1,04402
0,92436
1,06795
1,44487
2,00726
2,65342
3,28162
3,80214
4,10726
4,15513
0,52200
0,54754
0,56948
0,58392
0,58947
0,58475
0,57059
0,54949
0,52422
0,50006
0,47979
0,46785
0,46591
0,47396
0,49062
0,51367
0,53894
0,56198
0,57947
0,58836
0,58697
0,57586
0,55726
0,53366
0,50839
0,48646
0,47146
0,46536
0,46924
0,48285
0,50395
0,52811
0,55282
0,57281
0,58530
0,58808
0,58169
0,56642
0,54449
0,52033
0,49756
0,47924
0,46924
0,46869
0,6247
0,5935
0,4547
0,2499
0,0104
-0,2360
-0,4408
-0,5796
-0,6178
-0,5553
-0,4026
-0,1735
0,0764
0,3089
0,4963
0,6039
0,6039
0,5067
0,3297
0,0937
-0,1562
-0,3714
-0,5276
-0,6109
-0,5900
-0,4616
-0,2638
-0,0278
0,2187
0,4338
0,5657
0,6109
0,5588
0,4061
0,1909
-0,0451
-0,2707
-0,4651
-0,5761
-0,5866
-0,5137
-0,3540
-0,1319
0,1041
0,43375
-2,12562
-4,29484
-5,55328
-6,07391
-5,64000
-4,29500
-2,21250
0,30375
2,68969
4,77219
5,98719
6,03031
5,24937
3,68781
1,34500
-1,21484
-3,42750
-5,16266
-6,07359
-5,81344
-4,64219
-2,99359
-0,78094
1,86547
4,07812
5,42312
6,03031
5,77000
4,33844
2,21266
-0,08672
-2,55969
-4,59859
-5,64000
-5,77031
-5,24938
-3,81766
-1,51844
0,78094
2,90672
4,77203
5,72672
5,64016
11
3,36
2,00726 0,54310 -0,55184 -1,51844
3,36
3,93376 0,47757 0,3193 4,85891
3,40
2,63547 0,51978 -0,57267 0,73734
3,40
3,49102 0,49423 0,4928 3,38391
3,44
3,23974 0,49729 -0,49285 3,08031
3,44
2,88675 0,51700 0,5900 0,99797
3,48
3,73034 0,48035 -0,32625 4,68562
3,48
2,23462 0,54143 0,5727 -1,51844
3,52
4,01752 0,47119 -0,11800 5,50984
3,52
1,64231 0,56281 0,4686 -3,51422
3,56
4,05342 0,47091 0,11454 5,63984
3,56
1,19359 0,57892 0,2915 -5,07594
3,60
3,82607 0,48035 0,33319 4,68547
3,60
0,9782 0,58614 0,0625 -5,90016
3,64
3,38333 0,49756 0,48937 2,86344
3,64
1,00214 0,58392 -0,1805 -5,64000
3,68
2,79701 0,51950 0,56226 0,69406
3,68
1,27735 0,57170 -0,3887 -4,33844
3,72
2,16880 0,54255 0,54490 -1,43172
3,72
1,76197 0,55282 -0,5276 -2,47281
3,76
1,60043 0,56309 0,44772 -3,47063
3,76
2,37222 0,52950 -0,5866 -0,30375
3,80
1,17564 0,57836 0,26725 -5,07609
3,80
3,01239 0,50589 -0,5519 2,03891
3,84
0,97820 0,58447 0,04164 -5,68344
3,84
3,57479 0,48535 -0,4234 4,20828
3,88
1,02607 0,58169 -0,18742 -5,37938
3,88
3,96966 0,47202 -0,2152 5,51000
3,92
1,30726 0,56948 -0,38871 -3,55719
3,92
4,13718 0,46813 0,0174 4,33859
3,96
1,77991 0,55060 -0,47200 -2,08219
3,96
4,02949 0,47341 0,1319 2,86344
COMPORTAMENTO DINAMICO 3.
COMPORTAMENTO DINAMICO 4.
TEMPO FORZA POSIZ. VELOC. ACCELE. TEMPO FORZA POSIZ. VELOC ACCELE.
(s).
(N).
(m).
(m/s).
(m/s2).
(s).
(N).
(m).
(m/s).
(m/s2).
0,00
4,61581 0,45147 0,16655 4,07875
0,00
3,62265 0,48451 -0,2291 2,69031
0,04
4,41239 0,45814 0,32970 5,68391
0,04
3,89786 0,47535 -0,1215 4,16531
0,08
3,89786 0,47785 0,62126 5,33656
0,08
3,93974 0,47480 0,1041 5,37984
0,12
3,16197 0,50784 0,75662 1,51844
0,12
3,73632 0,48368 0,3089 4,38172
0,16
2,33034 0,53838 0,74274 -1,43172
0,16
3,32350 0,49951 0,4547 2,77641
0,20
1,54658 0,56726 0,64209 -3,90453
0,20
2,78504 0,52005 0,5310 0,86781
0,24
0,93034 0,58975 0,43038 -6,16063
0,24
2,19273 0,54199 0,5241 -1,38813
0,28
0,57735 0,60169 0,14924 -7,37531
0,28
1,65427 0,56198 0,4200 -3,38406
0,32
0,54145 0,60169 -0,15965 -7,37531
0,32
1,25940 0,57559 0,2534 -4,59875
0,36
0,83462 0,58891 -0,44079 -5,98719
0,36
1,06197 0,58225 0,0521 -5,29281
0,40
1,38504 0,56642 -0,63863 -3,64422
0,40
1,09786 0,57975 -0,1701 -5,11938
0,44
2,12692 0,53782 -0,73233 -0,95422
0,44
1,34914 0,56864 -0,3575 -3,86125
0,48
2,94658 0,50784 -0,71496 1,90891
0,48
1,79786 0,55115 -0,4790 -2,12578
0,52
3,70043 0,48063 -0,57961 4,59859
0,52
2,36026 0,53033 -0,5276 -0,26031
0,56
4,26282 0,46147 -0,34708 6,46437
0,56
2,94658 0,50895 -0,4998 1,82219
0,60
4,54402 0,45286 -0,06246 6,94141
0,60
3,45513 0,49034 -0,3818 3,77438
0,64
4,48419 0,45647 0,20824 6,85453
0,64
3,80812 0,47841 -0,1978 4,98906
0,68
4,10726 0,46952 0,48590 6,03047
0,68
3,93974 0,47452 0,0174 5,42312
0,72
3,46111 0,49534 0,69067 3,16703
0,72
3,83803 0,47979 0,2360 4,90250
0,76
2,68932 0,52477 0,73926 0,00016
0,76
3,50299 0,49340 0,4096 3,38391
0,80
1,88761 0,55448 0,69069 -2,42953
0,80
3,01239 0,51256 0,5067 1,47500
0,84
1,19359 0,58003 0,54490 -5,07625
0,84
2,43205 0,53394 0,5276 -0,56391
0,88
0,73291 0,59808 0,28459 -7,15828
0,88
1,86367 0,55476 0,4616 -2,60313
0,92
0,55940 0,60280 -0,02776 -7,37500
0,92
1,40897 0,57087 0,3193 -4,12156
0,96
0,69701 0,59586 -0,30541 -6,76797
0,96
1,12778 0,58031 0,1319 -5,03250
relazione 1
12
1,00
1,04
1,08
1,12
1,16
1,20
1,24
1,28
1,32
1,36
1,40
1,44
1,48
1,52
1,56
1,60
1,64
1,68
1,72
1,76
1,80
1,84
1,88
1,92
1,96
2,00
2,04
2,08
2,12
2,16
2,20
2,24
2,28
2,32
2,36
2,40
2,44
2,48
2,52
2,56
2,60
2,64
2,68
2,72
1,12179
1,78590
2,56367
3,35342
4,01154
4,42436
4,52009
4,28675
3,76624
3,04231
2,24658
1,50470
0,93034
0,63120
0,63120
0,93632
1,48675
2,21068
2,98846
3,70641
4,23291
4,47222
4,37650
3,98162
3,35342
2,59359
1,83974
1,18761
0,76282
0,62521
0,78077
1,21752
1,86367
2,62350
3,37735
3,99359
4,37051
4,43034
4,18504
3,65855
2,95855
2,18675
1,47479
0,94231
relazione 1
0,57836
0,55032
0,52061
0,49201
0,46897
0,45397
0,45453
0,46508
0,48562
0,51284
0,54255
0,56948
0,58891
0,59919
0,59780
0,58503
0,56309
0,53560
0,50673
0,48063
0,46258
0,45508
0,45703
0,47396
0,49840
0,52700
0,55532
0,58086
0,59586
0,59947
0,59197
0,57225
0,54699
0,51783
0,49062
0,46897
0,45564
0,45703
0,46785
0,48646
0,51450
0,54310
0,56920
0,58836
-0,56920
-0,72191
-0,72885
-0,64556
-0,47549
-0,18047
0,13882
0,38872
0,59696
0,71150
0,70802
0,57961
0,37137
0,11106
-0,17701
-0,43385
-0,61779
-0,70455
-0,68720
-0,55185
-0,31931
-0,06941
0,23601
0,51714
0,66291
0,71150
0,67332
0,50673
0,23254
-0,04859
-0,34014
-0,56226
-0,68026
-0,70456
-0,61085
-0,43730
-0,14924
0,15270
0,36790
0,58309
0,70802
0,68374
0,56573
0,35401
-5,20625
-1,99562
0,95437
3,16703
5,81359
7,67891
7,11500
5,72672
4,03469
1,38828
-1,64859
-4,20812
-5,85688
-6,85484
-6,81141
-5,50969
-3,38375
-0,86766
1,90875
4,59859
6,03047
6,94156
7,33187
5,33625
2,42953
0,13016
-2,55969
-5,50984
-6,94141
-7,15844
-6,42094
-4,25156
-1,77875
0,86766
3,34078
5,77016
7,37500
6,46422
5,37984
4,25156
1,25813
-1,77875
-4,12156
-6,07375
1,00
1,04
1,08
1,12
1,16
1,20
1,24
1,28
1,32
1,36
1,40
1,44
1,48
1,52
1,56
1,60
1,64
1,68
1,72
1,76
1,80
1,84
1,88
1,92
1,96
2,00
2,04
2,08
2,12
2,16
2,20
2,24
2,28
2,32
2,36
2,40
2,44
2,48
2,52
2,56
2,60
2,64
2,68
2,72
1,06197
1,24145
1,61838
2,13889
2,71923
3,25171
3,67650
3,89786
3,88590
3,63461
3,20385
2,65342
2,07906
1,57650
1,22949
1,08590
1,17564
1,48077
1,94744
2,50385
3,06026
3,52692
3,82607
3,89188
3,73632
3,37137
2,86282
2,30043
1,76795
1,36111
1,13974
1,13974
1,34914
1,75598
2,28248
2,85085
3,35940
3,71838
3,88590
3,82008
3,52692
3,07820
2,52778
1,98333
0,58142
0,57364
0,55809
0,53838
0,51645
0,49701
0,48285
0,47563
0,47730
0,48785
0,50450
0,52533
0,54643
0,56476
0,57697
0,58114
0,57642
0,56420
0,54615
0,52533
0,50450
0,48812
0,47785
0,47674
0,48368
0,49812
0,51728
0,53866
0,55782
0,57225
0,57947
0,57864
0,56892
0,55310
0,53283
0,51228
0,49395
0,48146
0,47674
0,48063
0,49229
0,50950
0,53033
0,55087
-0,0833
-0,2916
-0,4408
-0,5206
-0,5171
-0,4200
-0,2673
-0,0694
0,1527
0,3401
0,4686
0,5241
0,4928
0,3818
0,2048
-0,0069
-0,2117
-0,3783
-0,4859
-0,5206
-0,4651
-0,3332
-0,1423
0,0729
0,2672
0,4200
0,5067
0,5067
0,4200
0,2707
0,0798
-0,1319
-0,3193
-0,4512
-0,5102
-0,4859
-0,3853
-0,2152
-0,0104
0,1944
0,3610
0,4755
0,5171
0,4547
-5,29297
-4,46844
-2,86312
-0,95453
1,25797
3,12359
4,38188
5,24953
5,11922
3,94797
2,29953
0,30359
-1,77891
-3,60078
-4,85891
-5,20609
-4,64219
-3,42734
-1,77875
0,26031
2,34281
4,03469
5,07594
5,11922
4,33844
2,99359
1,08453
-1,08453
-2,95016
-4,25172
-5,03250
-4,98906
-3,99125
-2,38625
-0,43406
1,56188
3,38422
4,68547
5,11906
4,64203
3,51437
1,95234
-0,26047
-2,34266
13
2,76
2,80
2,84
2,88
2,92
2,96
3,00
3,04
3,08
3,12
3,16
3,20
3,24
3,28
3,32
3,36
3,40
3,44
3,48
3,52
3,56
3,60
3,64
3,68
3,72
3,76
3,80
3,84
3,88
3,92
3,96
0,67308
0,68504
1,00214
1,56453
2,27650
3,03632
3,71838
4,20299
4,40641
4,30470
3,89786
3,27564
2,52179
1,77991
1,16966
0,77479
0,66709
0,84658
1,29530
1,94744
2,70128
3,41923
3,99957
4,34060
4,36453
4,08333
3,54487
2,84487
2,08504
1,42094
0,91838
0,59752
0,59474
0,58142
0,55893
0,53227
0,50423
0,48007
0,46286
0,45703
0,46036
0,47785
0,50173
0,53033
0,55809
0,57975
0,59391
0,59697
0,58780
0,56920
0,54366
0,51561
0,48951
0,46730
0,45647
0,45786
0,46980
0,49090
0,51783
0,54560
0,57059
0,58891
0,07982
-0,20130
-0,44772
-0,61432
-0,68372
-0,65250
-0,51714
-0,28806
-0,03124
0,26030
0,51714
0,65597
0,70455
0,61779
0,44773
0,21519
-0,07635
-0,34707
-0,55185
-0,66985
-0,67679
-0,60391
-0,41301
-0,11800
0,16659
0,41301
0,60044
0,68374
0,65944
0,54144
0,45815
-6,94141
-6,59437
-5,16281
-2,95000
-0,47719
2,08234
4,55547
6,07375
6,85453
6,85469
4,94594
2,34266
-0,47734
-3,21031
-5,03250
-6,55094
-7,02828
-5,94375
-4,03469
-1,56172
0,82422
3,29719
6,07391
7,24500
6,63766
5,42312
3,38406
0,73750
-1,77875
-2,51609
-2,08219
2,76
2,80
2,84
2,88
2,92
2,96
3,00
3,04
3,08
3,12
3,16
3,20
3,24
3,28
3,32
3,36
3,40
3,44
3,48
3,52
3,56
3,60
3,64
3,68
3,72
3,76
3,80
3,84
3,88
3,92
3,96
1,52265
1,22949
1,13974
1,26538
1,60641
2,08504
2,64145
3,16197
3,58675
3,83205
3,85000
3,64658
3,25769
2,74915
2,19872
1,70812
1,33718
1,16966
1,20555
1,46880
1,89359
2,42607
2,96453
3,43718
3,75427
3,86795
3,75427
3,43718
2,96453
2,42009
1,89957
0,56670
0,57725
0,57947
0,57281
0,55976
0,54116
0,52061
0,50145
0,48646
0,47841
0,47868
0,48729
0,50256
0,52172
0,54255
0,56032
0,57309
0,57892
0,57559
0,56503
0,54865
0,52838
0,50839
0,49201
0,48090
0,47841
0,48368
0,49618
0,51450
0,53477
0,55393
0,3297
0,1597
-0,0555
-0,2464
-0,3957
-0,4894
-0,4963
-0,4269
-0,2881
-0,0972
0,1111
0,2985
0,4304
0,4998
0,4824
0,3818
0,2325
0,0312
-0,1735
-0,3367
-0,4581
-0,5033
-0,4547
-0,3436
-0,1701
0,0347
0,2221
0,3853
0,4824
0,4929
0,4790
-3,68766
-4,81578
-5,07594
-4,25156
-3,03672
-1,25812
0,78078
2,60312
4,12141
4,98906
4,94594
3,99125
2,51625
0,65094
-1,47516
-3,12375
-4,38172
-5,07594
-4,59875
-3,55750
-2,08234
0,04344
1,99547
3,55750
4,72906
4,90234
4,38172
3,25375
1,34500
-0,04312
-0,34687
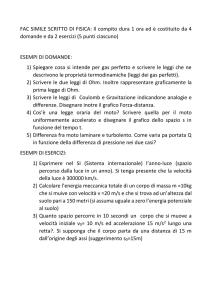
Nelle pagine seguenti verranno riportati tutta una serie di grafici che si riferiscono alle
nostre quattro rilevazioni effettuate. Per ogni rilevazione ci saranno due grafici: il primo è
posizione verso tempo, mentre il secondo accomuna in se due andamenti, quello della
velocità e della accelerazione entrambe ovviamente verso il tempo. Questi grafici sono
stati svolti sia per valutare in modo qualitativo quale rilevamento era il migliore, sia per
una completezza formale della elaborazione, in quanto ci permette di verificare
visivamente alcune proprietà del moto armonico semplice che andremmo a dimostrare
successivamente.
relazione 1
14
COMPORTAMENTO DINAMICO 1.
GRAFICO POSIZIONE VERSO TEMPO.
0,60
0,58
Posizione (m).
0,56
0,54
0,52
0,50
0,48
0,46
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
Tempo (s).
GRAFICO VELOCITA'-ACCELERAZIONE VERSO TEMPO.
VELOCITA'
ACCELERAZIONE
2
Velocità (m/s)-Accelerazione (m/s ).
8,00
7,00
6,00
5,00
4,00
3,00
2,00
1,00
0,00
-1,00
-2,00
-3,00
-4,00
-5,00
-6,00
-7,00
-8,00
0,00
relazione 1
0,50
1,00
1,50
2,00
2,50
Tempo (s).
3,00
3,50
4,00
4,50
15
COMPORTAMENTO DINAMICO 2.
GRAFICO POSIZIONE VERSO TEMPO.
0,60
0,58
Posizione (m).
0,56
0,54
0,52
0,50
0,48
0,46
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
Tempo (s).
VELOCITA'-ACCELERAZIONE VERSO TEMPO.
VELOCITA'
ACCELERAZIONE
2
Velocità (m/s)-Accelerazione (m/s ).
8,00
7,00
6,00
5,00
4,00
3,00
2,00
1,00
0,00
-1,00
-2,00
-3,00
-4,00
-5,00
-6,00
-7,00
-8,00
0,00
relazione 1
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
Tempo (s).
16
COMPORTAMENTO DINAMICO 3.
GRAFICO POSIZIONE VERSO TEMPO.
0,62
0,60
0,58
Posizione (m).
0,56
0,54
0,52
0,50
0,48
0,46
0,44
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
Tempo (s).
2
Velocità (m/s)-Accelerazione (m/s ).
GRAFICO VELOCITA'-ACCELERAZIONE VERSO TEMPO.
9,00
8,00
7,00
6,00
5,00
4,00
3,00
2,00
1,00
0,00
-1,00
-2,00
-3,00
-4,00
-5,00
-6,00
-7,00
-8,00
-9,00
0,00
0,50
1,00
1,50
2,00
2,50
3,00
VELOCITA'
ACCELERAZIONE
3,50
4,00
4,50
Tempo (s).
relazione 1
17
COMPORTAMENTO DINAMICO 4.
GRAFICO POSIZIONE VERSO TEMPO.
0,60
0,58
Posizione (m).
0,56
0,54
0,52
0,50
0,48
0,46
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
Tempo (s).
GRAFICO VELOCITA'-ACCELERAZIONE VERSO TEMPO.
VELOCITA'
ACCELERAZIONE
2
Velocità (m/s)-Accelerazione (m/s ).
7,00
6,00
5,00
4,00
3,00
2,00
1,00
0,00
-1,00
-2,00
-3,00
-4,00
-5,00
-6,00
-7,00
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
Tempo (s).
relazione 1
18
VERIFICARE CHE IL MOTO PUO’ ESSERE TRATTATO COME ARMONICO
SEMPLICE.
Il nostro primo obiettivo è di dimostrare che il moto del nostro sistema può essere trattato
come armonico semplice. Per avvallare questa ipotesi dobbiamo verificare le principali
proprietà che lo caratterizzano (isocronia, sfasamenti). Per questa analisi prendiamo in
considerazione il comportamento dinamico della molla n°4, in quanto sembra essere
qualitativamente il migliore. Il moto armonico semplice lungo un'asse rettilineo è un moto
vario la cui legge oraria è definita dalla relazione x(t)=A sen (ωt+φ), dove A è l'ampiezza
del moto, ω è la pulsazione e φ è la fase iniziale. Quindi A è il massimo spostamento
dall'origine. Derivando x(t), si ottiene la legge oraria della velocità del punto
v(t)=ω A cos (ωt+φ), e derivando ulteriormente si ottiene l'accelerazione del punto
a(t)= -ω2x. Prima di occuparci della isocronia e dei sfasamenti possiamo vedere
qualitativamente se la nostra ipotesi iniziale possa essere verificata, sovrapponendo al
grafico posizione-tempo (del quarto comportamento dinamico della molla), il grafico delle
oraria del moto armonico semplice, così come l’abbiamo definita precedentemente,
ovviamente per far questo ci dobbiamo trovare l’ampiezza A, ω e φ. A partire dai dati
numerici della nostra rilevazione.
Valori di 2A.
Valore medio di A.
0,10773
0,0519
0,10579
0,10440
0,10273
0,10106
0,10051
Per definizione A è il massimi spostamento del punto dall’origine, ma essendo il nostro un
moto reale è soggetto a un certo smorzamento (dovuto all’attrito viscoso dell’aria e alla
molla che non è certo ideale), quindi è forse più corretto prendere in considerazione il
valore medio di A.
A questo punto è arrivato il momento di determinare il valore di ω, ci dobbiamo ricordare
che essa è uguale a √(k/m), dove k è uguale a 26,85, e tale valore ci è fornito dall’analisi
del comportamento statico della molla. Per quanto concerne m in questo caso nella nostra
esperienza di laboratorio abbiamo utilizzato una massa da 250g, ma ci dobbiamo ricordare
anche della massa del cestello, pari a 10,1g. Ovviamente ω può essere calcolata andando
a considerare il grafico dell’accelerazione verso posizione, ma in questo modo
introduciamo una grandezza (l'accelerazione) nella quale gli errori sono stati amplificati
dalle operazioni di derivazione, comunque più avanti analizzeremmo anche questo grafico.
10,160193
Valore di ω.
Per determinare la fase iniziale φ, abbiamo utilizzato un metodo che può essere definito
empirico, ma che ha una sua logica, e per il nostro scopo è più che sufficiente.
relazione 1
19
TEMPO RIFERITO
x(t)=0,0519sen(10,1602t)
ALL'INTERVALLO
POSIZIO.
TEMPO (s).
SCELTO (s).
(m).
0,41
0,00
0,52840
0,42
0,04
0,54892
0,43
0,08
0,56609
0,12
0,57713
VALORE DI φ 4,1585
0,16
0,58022
0,20
0,57488
0,24
0,56196
0,28
0,54358
0,32
0,52272
0,36
0,50279
0,40
0,48703
0,44
0,47801
0,48
0,47720
0,52
0,48473
0,56
0,49938
0,60
0,51875
0,64
0,53969
0,68
0,55880
0,72
0,57295
0,76
0,57985
0,80
0,57836
0,84
0,56874
0,88
0,55254
0,92
0,53241
0,96
0,51163
1,00
0,49358
1,04
0,48120
1,08
0,47651
1,12
0,48028
1,16
0,49188
1,20
0,50943
1,24
0,53007
1,28
0,55044
1,32
0,56722
1,36
0,57768
1,40
0,58010
1,44
0,57411
1,48
0,56066
1,52
0,54197
1,56
0,52106
1,60
0,50135
1,64
0,48604
relazione 1
POSIZIONE
(m).
0,48406
0,48156
0,47953
x(t)=0,0519sen(10,1602t+4,1585)
TEMPO (s).
POSIZIO. (m).
0,00
0,04
0,08
0,12
0,16
0,20
0,24
0,28
0,32
0,36
0,40
0,44
0,48
0,52
0,56
0,60
0,64
0,68
0,72
0,76
0,80
0,84
0,88
0,92
0,96
1,00
1,04
1,08
1,12
1,16
1,20
1,24
1,28
1,32
1,36
1,40
1,44
1,48
1,52
1,56
1,60
1,64
0,48426
0,47706
0,47823
0,48757
0,50356
0,52360
0,54442
0,56263
0,57526
0,58026
0,57681
0,56548
0,54810
0,52752
0,50708
0,49011
0,47938
0,47663
0,48232
0,49552
0,51407
0,53496
0,55478
0,57030
0,57899
0,57945
0,57159
0,55669
0,53718
0,51625
0,49729
0,48340
0,47684
0,47868
0,48862
0,50504
0,52527
0,54600
0,56387
0,57596
0,58030
0,57619
20
1,68
1,72
1,76
1,80
1,84
1,88
1,92
1,96
2,00
2,04
2,08
2,12
2,16
2,20
2,24
2,28
2,32
2,36
2,40
2,44
2,48
2,52
2,56
2,60
2,64
2,68
2,72
2,76
2,80
2,84
2,88
2,92
2,96
3,00
3,04
3,08
3,12
3,16
3,20
3,24
3,28
3,32
3,36
3,40
3,44
relazione 1
0,47764
0,47750
0,48566
0,50078
0,52040
0,54132
0,56014
0,57379
0,58004
0,57788
0,56766
0,55105
0,53074
0,51006
0,49236
0,48053
0,47650
0,48093
0,49309
0,51100
0,53175
0,55195
0,56831
0,57818
0,57993
0,57329
0,55934
0,54034
0,51940
0,49993
0,48510
0,47731
0,47786
0,48663
0,50221
0,52206
0,54294
0,56145
0,57458
0,58018
0,57735
0,56655
0,54953
0,52907
0,50850
1,68
1,72
1,76
1,80
1,84
1,88
1,92
1,96
2,00
2,04
2,08
2,12
2,16
2,20
2,24
2,28
2,32
2,36
2,40
2,44
2,48
2,52
2,56
2,60
2,64
2,68
2,72
2,76
2,80
2,84
2,88
2,92
2,96
3,00
3,04
3,08
3,12
3,16
3,20
3,24
3,28
3,32
3,36
3,40
3,44
0,56429
0,54654
0,52584
0,50556
0,48900
0,47885
0,47678
0,48312
0,49683
0,51569
0,53661
0,55620
0,57126
0,57934
0,57912
0,57063
0,55527
0,53553
0,51463
0,49597
0,48259
0,47668
0,47919
0,48972
0,50655
0,52694
0,54757
0,56507
0,57660
0,58028
0,57551
0,56306
0,54497
0,52417
0,50407
0,48793
0,47838
0,47698
0,48396
0,49818
0,51732
0,53826
0,55760
0,57219
0,57963
21
3,48
3,52
3,56
3,60
3,64
3,68
3,72
3,76
3,80
3,84
3,88
3,92
3,96
0,49117
0,47991
0,47655
0,48163
0,49433
0,51259
0,53342
0,55343
0,56936
0,57862
0,57970
0,57243
0,55798
3,48
3,52
3,56
3,60
3,64
3,68
3,72
3,76
3,80
3,84
3,88
3,92
3,96
0,57874
0,56964
0,55382
0,53387
0,51302
0,49468
0,48183
0,47657
0,47975
0,49086
0,50808
0,52862
0,54911
Prima di tutto abbiamo determinato i valori di x(t)=0.0519sen(10,1602t), per t che vanno
da 0 a 3.96 ad intervalli di 0.04, nelle prime due colonne, in questa legge oraria del moto
armonico, la fase iniziale φ è 0, quindi il punto al momento x(0) si trova nell’origine.
Dobbiamo osservare che nel nostro moto sperimentale, al tempo t=0, il punto si trovava
nella posizione x(0)=0.48451, quindi si deve traslare la nostra curva così trovata di una
quantità pari a φ. Per fare questo prima di tutto dobbiamo osservare l’andamento di
entrambe le situazioni (quella determinata per via sperimentale e quella determinata a
partire dalla funzione x(t)), osserviamo che al tempo t=0.40, il nostro punto si trova nella
posizione 0.48703, e da tale posizione il punto scende ancora per un breve periodo di
tempo fino a raggiungere il minimo, quindi da qui in poi la funzione si comporta allo stesso
modo della curva sinusoidale sperimentale. Certamente è un valore che si avvicina a quello
voluto, ma non sufficiente, quindi si è reso necessario determinare la posizione del punto
in altri valori di t (0.41-0.42-0.43), operando in questa maniera ho cercato di avvicinarmi il
più possibile al valore voluto, certo si poteva continuare ulteriormente ma per i nostri
scopi, il valore di x(0.41)=0.48406, rispecchia fino alla terza cifra quello che noi vogliamo
cercare. Quindi in definitiva la curva sinusoidale deve essere traslata di 0.41s, da tale
valore ci si può calcolare quello di φ:
x(t)=0.0519sen(10.1602(t+0.41))
Quindi come si può facilmente notare per operare la traslazione noi sommiamo al tempo t
sempre una quantità costante pari a 0.41, quindi φ assume il seguente valore:
φ=10.1602×0.41=4.1585
Ed infine nelle ultime due colonne abbiamo determinato le varie posizioni x(t) al variare di
t della seguente legge oraria:
x(t)=0.0519sen(10.1602t+4.1585)
che dovrebbe approssimare il nostro andamento sinusoidale trovato sperimentalmente
nella rilevazione del quarto comportamento dinamico, quindi dimostrare in modo
qualitativo che la nostra legge oraria può essere trattata come un moto armonico
semplice, nel grafico che segue avremmo la conferma di questo.
relazione 1
22
CONFRONTO TRA L'ANDAMENTO SPERIMENTALE E QUELLO TEORICO.
ANDAMENTO SPERIMENTALE
ANDAMENTO TEORICO
0,60
0,58
Posizione (m).
0,56
0,54
0,52
0,50
0,48
0,46
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
Tempo (s).
Determinazione del periodo del moto armonico semplice con relativo errore.
Dopo aver dimostrato qualitativamente che la legge oraria da noi trovata approssima in
modo sufficientemente accurato il nostro andamento trovato sperimentalmente, passiamo
a considerazioni più specifiche che ci permetteranno di dimostrare non solo in modo
qualitativo la nostra ipotesi iniziale; cioè di dimostrare che il nostro moto può essere
trattato come armonico semplice. Quindi passiamo a trattare le proprietà specifiche di un
moto di questo tipo, in primo luogo la sua isocronia. Che consiste nel determinare il
periodo riferendoci a tutte e quattro le rilevazioni effettuate, in modo da migliorare il più
possibile la definizione di tale grandezza, con il relativo errore. Qui di seguito riportiamo il
risultato di tale analisi.
PERIODO
COMPORTAMEN.
Tmis (s).
n.
Tsp (s).
SPERIMENTALE
MEDIO
ΔT (s).
DINAMICO.
CON RELATIVO ERRORE.
1
3,68
6
0,613
0,007
0,613+0,007s
2
3,68
6
0,613
0,007
3
3,68
6
0,613
0,007
4
3,68
6
0,613
0,007
T (s).
Il periodo previsto per una molla ideale a partire dalla costante elastica è: 0,618
Questa tabella riporta nella prima colonna l’indicazione di quale comportamento dinamico
ci si sta riferendo, nella seconda colonna è riportato il tempo ricorrente tra le n oscillazioni,
dove n è indicato nella terza colonna. Dopo di che abbiamo Tsp, che è definito come il
tempo del periodo misurato sperimentalmente, ed è fornito dalla seguente relazione:
Tsp=Tmis/n
relazione 1
23
Mentre ΔT è l’errore definito su tale grandezza, ed esso è dato dalla seguente relazione:
⎛ δt ⎞
⎛ δt ⎞
ΔT = ⎜ ⎟ + ⎜ ⎟
⎝n⎠
⎝n⎠
dove δt è l’incertezza sull’istante di inizio e di fine misura, in altri termini il tempo di
campionamento che nel nostro caso è uguale a 0,04s. La media di tutto questo è riportata
nell’ultima colonna, ma è alquanto elementare, in quanto da tutti e quattro i
comportamenti dinamici abbiamo ottenuto lo stesso univo valore del periodo e sia
ovviamente dell’errore. Oltre a questo per una ulteriore conferma del valore così definito,
abbiamo determinato il periodo a partire dalla costante elastica k utilizzando la seguente
relazione dataci dalla teoria:
2
2
m
k
e come possiamo notare il periodo così definito si avvicina in modo considerevole al valore
del periodo sperimentale medio, e comunque si deve notare che è compreso nel suo
errore (nella sua variabilità), che dipende dal fattore di incertezza sull’istante di inizio e di
fine misura. Queste considerazioni fin qui fatte ci indicano che il nostro moto sperimentale
è senz’altro isocrono, sia perché abbiamo rilevato valori del periodo uguali, sia perché tale
periodo trovato sperimentalmente è stato verificato da un’altra relazione che introduce
grandezze diverse (la massa e la costante elastica k).
T = 2π
Studio degli sfasamenti.
Per dare una dimostrazione conclusiva che il nostro è un moto armonico si devono
dimostrare gli sfasamenti che lo caratterizzano. Prima di tutto è meglio chiarire cosa sono
questi sfasamenti, infatti, se noi osserviamo il grafico posizione verso tempo, e il grafico
velocità verso tempo, osserviamo che quando il punto si trova nell’origine la sua velocità è
massima (considerandola in modulo), quindi le due funzioni sono sfasate di π/2 (sono in
quadratura di fase). Mentre se facciamo le stesso confronto, ma in questo caso con il
grafico dell’accelerazione verso tempo, osserviamo che quando la posizione del punto è in
un massimo (o in un minimo), l’accelerazione è nel suo punto di minimo (o di massimo),
quindi in altri termini il grafico dell’accelerazione è simmetrico rispetto a quello della
posizione, quindi è in opposizione di fase (sfasato di π).
TEMPO POSIZ. POSIZ. RISPETTO VELOC. ACCEL. V. MODUL.
(s).
(m).
ALL'ORIGINE (m). (m/s).
(m/s2).
(m/s).
0,00
0,48451
-0,04380
-0,2291 2,69031
0,2291
0,04
0,47535
-0,05296
-0,1215 4,16531
0,1215
0,08
0,4748
-0,05351
0,1041
5,37984
0,1041
0,12
0,48368
-0,04463
0,3089
4,38172
0,3089
0,16
0,49951
-0,0288
0,4547
2,77641
0,4547
0,20
0,52005
-0,00826
0,531
0,86781
0,5310
0,24
0,54199
0,01368
0,5241 -1,38813
0,5241
0,28
0,56198
0,03367
0,4200 -3,38406
0,4200
0,32
0,57559
0,04728
0,2534 -4,59875
0,2534
0,36
0,58225
0,05394
0,0521 -5,29281
0,0521
0,40
0,57975
0,05144
-0,1701 -5,11938
0,1701
relazione 1
24
0,44
0,48
0,52
0,56
0,60
0,64
0,68
0,72
0,76
0,80
0,84
0,88
0,92
0,96
1,00
1,04
1,08
1,12
1,16
1,20
1,24
1,28
1,32
1,36
1,40
1,44
1,48
1,52
1,56
1,60
1,64
1,68
1,72
1,76
1,80
1,84
1,88
1,92
1,96
2,00
2,04
2,08
2,12
2,16
relazione 1
0,56864
0,55115
0,53033
0,50895
0,49034
0,47841
0,47452
0,47979
0,4934
0,51256
0,53394
0,55476
0,57087
0,58031
0,58142
0,57364
0,55809
0,53838
0,51645
0,49701
0,48285
0,47563
0,4773
0,48785
0,5045
0,52533
0,54643
0,56476
0,57697
0,58114
0,57642
0,5642
0,54615
0,52533
0,5045
0,48812
0,47785
0,47674
0,48368
0,49812
0,51728
0,53866
0,55782
0,57225
0,04033
0,02284
0,00202
-0,01936
-0,03797
-0,04990
-0,05379
-0,04852
-0,03491
-0,01575
0,00563
0,02645
0,04256
0,05200
0,05311
0,04533
0,02978
0,01007
-0,01186
-0,03130
-0,04546
-0,05268
-0,05101
-0,04046
-0,02381
-0,00298
0,01812
0,03645
0,04866
0,05283
0,04811
0,03589
0,01784
-0,00298
-0,02381
-0,04019
-0,05046
-0,05157
-0,04463
-0,03019
-0,01103
0,01035
0,02951
0,04394
-0,3575
-0,4790
-0,5276
-0,4998
-0,3818
-0,1978
0,0174
0,2360
0,4096
0,5067
0,5276
0,4616
0,3193
0,1319
-0,0833
-0,2916
-0,4408
-0,5206
-0,5171
-0,4200
-0,2673
-0,0694
0,1527
0,3401
0,4686
0,5241
0,4928
0,3818
0,2048
-0,0069
-0,2117
-0,3783
-0,4859
-0,5206
-0,4651
-0,3332
-0,1423
0,0729
0,2672
0,4200
0,5067
0,5067
0,4200
0,2707
-3,86125
-2,12578
-0,26031
1,82219
3,77438
4,98906
5,42312
4,9025
3,38391
1,4750
-0,56391
-2,60313
-4,12156
-5,0325
-5,29297
-4,46844
-2,86312
-0,95453
1,25797
3,12359
4,38188
5,24953
5,11922
3,94797
2,29953
0,30359
-1,77891
-3,60078
-4,85891
-5,20609
-4,64219
-3,42734
-1,77875
0,26031
2,34281
4,03469
5,07594
5,11922
4,33844
2,99359
1,08453
-1,08453
-2,95016
-4,25172
0,3575
0,4790
0,5276
0,4998
0,3818
0,1978
0,0174
0,2360
0,4096
0,5067
0,5276
0,4616
0,3193
0,1319
0,0833
0,2916
0,4408
0,5206
0,5171
0,4200
0,2673
0,0694
0,1527
0,3401
0,4686
0,5241
0,4928
0,3818
0,2048
0,0069
0,2117
0,3783
0,4859
0,5206
0,4651
0,3332
0,1423
0,0729
0,2672
0,4200
0,5067
0,5067
0,4200
0,2707
25
2,20
2,24
2,28
2,32
2,36
2,40
2,44
2,48
2,52
2,56
2,60
2,64
2,68
2,72
2,76
2,80
2,84
2,88
2,92
2,96
3,00
3,04
3,08
3,12
3,16
3,20
3,24
3,28
3,32
3,36
3,40
3,44
3,48
3,52
3,56
3,60
3,64
3,68
3,72
3,76
3,80
3,84
3,88
3,92
relazione 1
0,57947
0,57864
0,56892
0,5531
0,53283
0,51228
0,49395
0,48146
0,47674
0,48063
0,49229
0,5095
0,53033
0,55087
0,5667
0,57725
0,57947
0,57281
0,55976
0,54116
0,52061
0,50145
0,48646
0,47841
0,47868
0,48729
0,50256
0,52172
0,54255
0,56032
0,57309
0,57892
0,57559
0,56503
0,54865
0,52838
0,50839
0,49201
0,4809
0,47841
0,48368
0,49618
0,5145
0,53477
0,05116
0,05033
0,04061
0,02479
0,00452
-0,01603
-0,03436
-0,04685
-0,05157
-0,04768
-0,03602
-0,01881
0,00202
0,02256
0,03839
0,04894
0,05116
0,04450
0,03145
0,01285
-0,00770
-0,02686
-0,04185
-0,04990
-0,04963
-0,04102
-0,02575
-0,00659
0,01424
0,03201
0,04478
0,05061
0,04728
0,03672
0,02034
0,00007
-0,01992
-0,0363
-0,04741
-0,04990
-0,04463
-0,03213
-0,01381
0,00646
0,0798
-0,1319
-0,3193
-0,4512
-0,5102
-0,4859
-0,3853
-0,2152
-0,0104
0,1944
0,3610
0,4755
0,5171
0,4547
0,3297
0,1597
-0,0555
-0,2464
-0,3957
-0,4894
-0,4963
-0,4269
-0,2881
-0,0972
0,1111
0,2985
0,4304
0,4998
0,4824
0,3818
0,2325
0,0312
-0,1735
-0,3367
-0,4581
-0,5033
-0,4547
-0,3436
-0,1701
0,0347
0,2221
0,3853
0,4824
0,4929
-5,0325
-4,98906
-3,99125
-2,38625
-0,43406
1,56188
3,38422
4,68547
5,11906
4,64203
3,51437
1,95234
-0,26047
-2,34266
-3,68766
-4,81578
-5,07594
-4,25156
-3,03672
-1,25812
0,78078
2,60312
4,12141
4,98906
4,94594
3,99125
2,51625
0,65094
-1,47516
-3,12375
-4,38172
-5,07594
-4,59875
-3,5575
-2,08234
0,04344
1,99547
3,5575
4,72906
4,90234
4,38172
3,25375
1,3450
-0,04312
0,0798
0,1319
0,3193
0,4512
0,5102
0,4859
0,3853
0,2152
0,0104
0,1944
0,3610
0,4755
0,5171
0,4547
0,3297
0,1597
0,0555
0,2464
0,3957
0,4894
0,4963
0,4269
0,2881
0,0972
0,1111
0,2985
0,4304
0,4998
0,4824
0,3818
0,2325
0,0312
0,1735
0,3367
0,4581
0,5033
0,4547
0,3436
0,1701
0,0347
0,2221
0,3853
0,4824
0,4929
26
3,96
0,55393
0,02562
0,4790
-0,34687
0,4790
A questo punto possiamo costruire i grafici velocità verso posizione e accelerazione verso
posizione, in questo caso come posizione prendiamo quella riferita all’origine, e cerchiamo
di interpretarli.
GRAFICO VELOCITA' VERSO POSIZIONE.
0,60
Velocità (m/s)
0,40
0,20
0,00
-0,20
-0,40
-0,60
-0,06
-0,04
-0,02
0,00
0,02
0,04
0,06
Posizione (m).
relazione 1
27
GRAFICO ACCELERAZIONE VERSO POSIZIONE.
6,00
2
Accelerazione (m/s )
4,00
2,00
0,00
-2,00
-4,00
-6,00
-0,06
-0,04
-0,02
0,00
0,02
0,04
0,06
Posizione (m)
Dal primo grafico non si riesce a comprendere con precisione come si comporta la velocità
nei confronti della posizione assunta dal punto, comunque lo analizzeremmo da un altro
punto di vista più avanti. Invece dal grafico dell’accelerazione verso lo spostamento si
possono fare già molte considerazioni. Intanto si può affermare che nell’origine il punto ha
una accelerazione nulla, mentre l’accelerazione è massima quando il punto si trova nella
posizione di minimo, e viceversa l’accelerazione è massima con segno negativo quando il
punto si trova nella sua posizione di massimo. A questo punto dopo aver fatto queste
considerazioni, posso affermare con certezza che l’accelerazione è in opposizione di fase
rispetto alla posizione del punto, quindi è sfasata di una quantità pari a π. Oltre a questo si
deve dire che da tale grafico ci si può determinare ω, come avevamo già accentato
precedentemente, infatti, dalla teoria noi sappiamo che la legge oraria dell’accelerazione
nel moto armonico semplice è data dalla seguente relazione: a(t)=-ω2x. Allora è chiaro che
la pendenza della retta di regressione determinata sul grafico precedente ci fornisce -ω2, e
quindi ci possiamo determinare facilmente il valore di ω. Notiamo che nel grafico ci sono
quattro valori che si discostano dall’andamento generale di tutti gli altri, e notiamo che
questi punti sono i primi due e gli ultimi due, quindi è chiaro che sono affetti da un errore
determinato dal procedimento di derivazione. In conclusione la retta di regressione la
determineremmo facendo riferimento agli altri 96 valori, ma escludendo questi 4.
relazione 1
28
GRAFICO ACCELERAZIONE VERSO POSIZIONE DEPURATO.
6,00
2
Accelerazione (m/s )
4,00
2,00
0,00
-2,00
-4,00
-6,00
-0,06
-0,04
-0,02
0,00
0,02
0,04
0,06
Posizione (m).
La retta di regressione (y=A+Bx) è rappresentata dalla linea rossa, le sue caratteristiche
sono elencate di seguito:
Parametri
Valore
Errore
-----------------------------------------------------------A
0,01281
0,00625
B
-98,58976
0,16907
-----------------------------------------------------------Correlazione R: -0,99986
Quindi è facile determinare il valore di ω che è: 9,9292.
Da qui ci si può calcolare facilmente la rigidità della molla k, infatti, noi sappiamo dalla
teoria che ω=√(k/m), quindi k=ω2m=98,58976×0.2601=25.64.
Tale valore di k si avvicina a quello trovato per via statica che è pari a 26.85, certo che
esiste una certa discrepanza, ma sono anche certo che il valore trovato per via statica è
quello più attendibile, in quanto il valore della rigidezza trovata per via dinamica introduce
una grandezza (l’accelerazione) che nella sua determinazione è stata introdotta una
doppia derivazione, con la conseguente introduzione di errori dovuti all’amplificazione di
quelli già esistenti, e dovuti all’intrinseco metodo di calcolo delle derivate, che può portare
a una perdita di informazioni. Per avvallare ulteriormente la mia affermazione si possono
confrontare i coefficienti di correlazione che esprimono il grado di dipendenza tra due serie
di dati che per esempio sono legati da una relazione lineare. Nel primo caso il coefficiente
di correlazione vale 0.99997, mentre nel secondo vale in modulo 0.99986, certamente il
primo esprime un grado di dipendenza migliore del secondo: questo ci da la conferma che
relazione 1
29
il k determinato per via statica è certamente più attendibile rispetto a quello calcolato per
via dinamica. Comunque i due valori sono confrontabili anche se si devono fare le dovute
considerazioni.
A questo punto riprendiamo l’analisi del grafico velocità verso posizione, da questo risulta
un andamento ellissoidale, dal quale però non riusciamo a comprendere il suo significato
in modo completo, in quanto la velocità cambia di segno, ma possiamo osservare che
l’andamento della velocità quando essa è negativa, è speculare a quello di quando è
positiva. Quindi qui di seguito riportiamo il grafico della velocità in modulo verso la
posizione.
GRAFICO VELOCITA' (MODULO) VERSO POSIZIONE.
0,6
Velocità (m/s)
0,5
0,4
0,3
0,2
0,1
0,0
-0,06
-0,04
-0,02
0,00
0,02
0,04
0,06
Posizione (m)
In questo grafico l’interpretazione dell’andamento della velocità rispetto la posizione risulta
più comprensibile, in quanto si nota immediatamente che la velocità è massima quando il
punto si trova nell’origine del moto, e risulta essere uguale a 0 quando il punto si trova
alle estremità del moto (nella posizione di massimo e di minimo). Da queste riflessioni
posso affermare che il grafico della velocità (verso il tempo) risulta essere in quadratura di
fase rispetto a quello della posizione (sempre verso il tempo), cioè sfasati di π/2.
Dopo questa lunga disquisizione abbiamo dimostrato che il nostro moto rilevato
sperimentalmente può essere trattato come un moto armonico semplice, in quanto lo
abbiamo dimostrato in modo qualitativo, e quantitativo dimostrando le sue principali
proprietà (isocronia del moto, sfasamenti) applicate al nostro caso e verificate.
relazione 1
30
GRAFICO DELL’ENERGIA TOTALE IN FUNZIONE DEL TEMPO.
Affrontiamo in questa parte della relazione la determinazione del grafico dell’energia
totale, dobbiamo sottolineare che il nostro è un oscillatore armonico (come abbiamo
dimostrato), quindi dobbiamo prendere in considerazione l’energia cinetica del punto, e
l’energia potenziale elastica. La loro somma è sempre costante, in altri termini durante il
moto abbiamo un continuo scambio tra le due energie. Questo è facilmente comprensibile,
in quanto nell’origine la velocità è massima, e quindi ovviamente anche l’energia cinetica,
mentre l’energia potenziale elastica della molla è nulla, infatti, in questa posizione la molla
si trova in una condizione di equilibrio e non risulta ne compressa ne allungata da tale
posizione. La somma delle due energie nell’origine è uguale all’energia cinetica massima.
La situazione si ribalta agli estremi del moto, in questo caso l’energia potenziale è
massima, mentre l’energia cinetica è nulla, in quanto anche la velocità in tali posizioni e
nulla. La somma delle due energie cinetiche agli estremi del moto è uguale all’energia
potenziale elastica massima. Nelle tre posizioni principali l’energia totale è uguale a:
Etot=Ep.max=Ek.max
Mentre in una posizione generica del moto l’energia totale è data dalla somma dell’energia
cinetica con quella potenziale elastica:
1 2
1
mv ( x) + kx 2
2
2
Dove m è la massa che nel nostro caso è uguale a 0.2601Kg, mentre v è la velocità, k è la
rigidezza della molla (noi utilizziamo quella determinata per via statica pari a 26,85N/m),
ed infine x è la posizione del punto rispetto l’origine.
Etot = E k + E p =
relazione 1
TEMPO (s).
POSIZ. RISPETTO
ALL'ORIGINE (m).
VELOC.
(m/s).
ENERG.
TOTALE
0,00
0,04
0,08
0,12
0,16
0,20
0,24
0,28
0,32
0,36
0,40
0,44
0,48
0,52
0,56
0,60
0,64
0,68
0,72
0,76
0,80
-0,0438
-0,05296
-0,05351
-0,04463
-0,0288
-0,00826
0,01368
0,03367
0,04728
0,05394
0,05144
0,04033
0,02284
0,00202
-0,01936
-0,03797
-0,0499
-0,05379
-0,04852
-0,03491
-0,01575
-0,2291
-0,1215
0,1041
0,3089
0,4547
0,5310
0,5241
0,4200
0,2534
0,0521
-0,1701
-0,3575
-0,4790
-0,5276
-0,4998
-0,3818
-0,1978
0,0174
0,2360
0,4096
0,5067
0,0326
0,0396
0,0398
0,0391
0,0380
0,0376
0,0382
0,0382
0,0384
0,0394
0,0393
0,0385
0,0368
0,0362
0,0375
0,0383
0,0385
0,0389
0,0388
0,0382
0,0367
31
0,84
0,88
0,92
0,96
1,00
1,04
1,08
1,12
1,16
1,20
1,24
1,28
1,32
1,36
1,40
1,44
1,48
1,52
1,56
1,60
1,64
1,68
1,72
1,76
1,80
1,84
1,88
1,92
1,96
2,00
2,04
2,08
2,12
2,16
2,20
2,24
2,28
2,32
2,36
2,40
2,44
2,48
2,52
2,56
relazione 1
0,00563
0,02645
0,04256
0,052
0,05311
0,04533
0,02978
0,01007
-0,01186
-0,0313
-0,04546
-0,05268
-0,05101
-0,04046
-0,02381
-0,00298
0,01812
0,03645
0,04866
0,05283
0,04811
0,03589
0,01784
-0,00298
-0,02381
-0,04019
-0,05046
-0,05157
-0,04463
-0,03019
-0,01103
0,01035
0,02951
0,04394
0,05116
0,05033
0,04061
0,02479
0,00452
-0,01603
-0,03436
-0,04685
-0,05157
-0,04768
0,5276
0,4616
0,3193
0,1319
-0,0833
-0,2916
-0,4408
-0,5206
-0,5171
-0,4200
-0,2673
-0,0694
0,1527
0,3401
0,4686
0,5241
0,4928
0,3818
0,2048
-0,0069
-0,2117
-0,3783
-0,4859
-0,5206
-0,4651
-0,3332
-0,1423
0,0729
0,2672
0,4200
0,5067
0,5067
0,4200
0,2707
0,0798
-0,1319
-0,3193
-0,4512
-0,5102
-0,4859
-0,3853
-0,2152
-0,0104
0,1944
0,0366
0,0371
0,0376
0,0386
0,0388
0,0386
0,0372
0,0366
0,0367
0,0361
0,0370
0,0379
0,0380
0,0370
0,0362
0,0358
0,0360
0,0368
0,0372
0,0375
0,0369
0,0359
0,0350
0,0354
0,0357
0,0361
0,0368
0,0364
0,0360
0,0352
0,0350
0,0348
0,0346
0,0355
0,0360
0,0363
0,0354
0,0347
0,0341
0,0342
0,0352
0,0355
0,0357
0,0354
32
2,60
2,64
2,68
2,72
2,76
2,80
2,84
2,88
2,92
2,96
3,00
3,04
3,08
3,12
3,16
3,20
3,24
3,28
3,32
3,36
3,40
3,44
3,48
3,52
3,56
3,60
3,64
3,68
3,72
3,76
3,80
3,84
3,88
3,92
3,96
relazione 1
-0,03602
-0,01881
0,00202
0,02256
0,03839
0,04894
0,05116
0,0445
0,03145
0,01285
-0,0077
-0,02686
-0,04185
-0,0499
-0,04963
-0,04102
-0,02575
-0,00659
0,01424
0,03201
0,04478
0,05061
0,04728
0,03672
0,02034
0,00007
-0,01992
-0,0363
-0,04741
-0,0499
-0,04463
-0,03213
-0,01381
0,00646
0,02562
0,3610
0,4755
0,5171
0,4547
0,3297
0,1597
-0,0555
-0,2464
-0,3957
-0,4894
-0,4963
-0,4269
-0,2881
-0,0972
0,1111
0,2985
0,4304
0,4998
0,4824
0,3818
0,2325
0,0312
-0,1735
-0,3367
-0,4581
-0,5033
-0,4547
-0,3436
-0,1701
0,0347
0,2221
0,3853
0,4824
0,4929
0,4790
0,0344
0,0342
0,0348
0,0337
0,0339
0,0355
0,0355
0,0345
0,0336
0,0334
0,0328
0,0334
0,0343
0,0347
0,0347
0,0342
0,0330
0,0331
0,0330
0,0327
0,0340
0,0345
0,0339
0,0328
0,0329
0,0329
0,0322
0,0330
0,0339
0,0336
0,0332
0,0332
0,0328
0,0321
0,0386
33
ENERGIA TOTALE VERSO TEMPO.
0,040
0,039
Energia (J).
0,038
0,037
0,036
0,035
0,034
0,033
0,032
0,031
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
Tempo (s).
Come possiamo osservare da questo grafico dell’energia totale in funzione del tempo,
l’andamento che otteniamo è alquanto irregolare, ma nel suo complesso esso rimane
confinato tra lo 0.03J e 0.04J, quindi posso affermare entro certi limiti che l’energia totale
rimane costante. Ovviamente il nostro sistema sperimentale non rispecchia quello teorico,
in quanto come possiamo vedere l’andamento è si irregolare, ma in generale individua una
tendenza ben precisa alla diminuzione dell’energia totale con il passare del tempo. Questo
perché una parte dell’energia viene ad essere dissipata dagli attriti presenti nel sistema,
basti pensare all’attrito viscoso dell’aria, visivamente tale diminuzione di energia totale si
manifesta con lo smorzamento del moto. Possiamo determinare anche il valore medio
delle due forme di energia (cinetica e potenziale), e quindi determinarci il valore medio
dell’energia totale, infatti, dalla teoria abbiamo le seguenti relazioni.
1
1
1
1
( E k ) m = mω 2 A 2 = Etot
( E p ) m = kA 2 = Etot
4
2
4
2
Quindi i valori medi dell’energia cinetica e dell’energia potenziale sono uguali; allora in
media l’energia totale è per metà cinetica e per metà potenziale, ovviamente tutto questo
in teoria. Andando a sostituire nelle relazioni i valori adeguati otteniamo:
(Ek)m=0.018 J
(Ep)m=0.018J
Da questo abbiamo che l’energia media totale è pari a 0.036J. Possiamo evidenziare
visivamente questo risultato con il seguente grafico, dove la retta rossa rappresenta
l’energia totale media del nostro sistema.
relazione 1
34
ENERGIA TOTALE VERSO TEMPO.
0,040
0,039
Energia (J).
0,038
0,037
0,036
0,035
0,034
0,033
0,032
0,031
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
Tempo (s).
Devo ricordare che nel considerare l’energia totale in funzione del tempo, ho escluso il
primo valore e l’ultimo, in quanto erano ampiamente in disaccordo con l’andamento
generale.
relazione 1
35
STUDIO E ANALISI DEI GRAFICI FORZA-ACCELERAZIONE E FORZA-POSIZIONE.
Riportiamo qui di seguito entrambi i grafici.
GRAFICO FORZA VERSO POSIZIONE.
4,00
3,50
Forza (N).
3,00
2,50
2,00
1,50
1,00
-0,06
-0,04
-0,02
0,00
0,02
0,04
0,06
Posizione (m).
GRAFICO FORZA VERSO ACCELERAZIONE.
4,00
3,50
Forza (N).
3,00
2,50
2,00
1,50
1,00
-6,00
relazione 1
-4,00
-2,00
0,00
2,00
2
Accelerazione (m/s ).
4,00
6,00
36
Prima di tutto osserviamo che tra la forza e la posizione abbiamo un andamento lineare.
Come si potrà meglio comprendere nella rappresentazione grafica delle forze; la forza
misurata dal sensore è kx: nell’origine del moto detta anche posizione di equilibrio il
sensore misura mg, cioè la forza peso del corpo appeso alla molla, che con un semplice
calcolo è uguale a 2.55N (trascurando la massa della molla), che il grafico ci conferma. A
prima vista sembrano due grafici totalmente diversi, ma in realtà sono intimamente
correlati, infatti, possiamo analizzare la situazione agli estremi del moto:
• Quando il punto si trova nella posizione di minimo, la molla è nella sua massima
estensione, e l’accelerazione è massima, in questo caso il sensore di forza non
misurerà solamente la forza peso ma anche la componente ma portata
dall’accelerazione della massa. Allora F=kx=mg+ma, con a presa con il suo segno.
• Quando il punto si trova nella posizione di massimo, la molla avrà l’allungamento
minimo, l’accelerazione sarà massima in modulo ma avrà segno negativo; inizialmente
ho affermato che il sensore di forza misura Kx, dove x è l’allungamento totale della
molla, ma in questo caso x è minimo e allora la forza misurata dal sensore sarà
ovviamente minima.
Dal primo grafico tracciando la retta di regressione e determinandoci la pendenza (F/x)
ritroviamo –k, infatti, noi sappiamo che F=kx, in questo caso il foglio elettronico ci fornisce
un valore di k uguale a 26.81N/m, certamente un valore di k che si avvicina in modo
significativo a quello trovato per via statica pari a 26.85N/m. Dal grafico della forza verso
l’accelerazione individuiamo dalla pendenza della retta di regressione la massa m, infatti,
noi sappiamo che F=ma, in questo caso m risulta essere pari a 0.2722Kg, certamente un
valore che si avvicina a 0.2601Kg, ma che risente delle approssimazioni fatte nel calcolo
delle derivate (infatti il grafico è stato depurato da tre valori che esulavano completamente
dall’andamento generale) e della decisione (inevitabile comunque) di trascurare la massa
della molla (4.6g), e in ultima analisi si deve tenere conto che il moto da noi considerato
subisce uno smorzamento.
RAPPRESENTAZIONE GRAFICA DELLE FORZE CHE AGISCONO SUL SISTEMA.
Nel primo caso sono rappresentate le forze presenti in una situazione statica, cioè il corpo
di massa m ha una accelerazione uguale a 0, quindi la forza misurata dal sensore di forza,
è semplicemente mg (la forza peso del corpo), e la mola subisce un allungamento x in
ragione della costante elastica k, quindi in modo più completo la forza misurata dal
sensore sarà F=kx=mg.
Nel secondo caso l’accelerazione del corpo è diversa da 0, allora il sistema sarà regolato
dalla seguente legge:
F=kx=mg+ma
Questa è la forza misurata dal sensore di forza, che ancora una volta è uguale a kx, ma in
questo caso oltre a mg abbiamo una componente generata dall’accelerazione del punto
(che può essere positiva o negativa). Quindi in conclusione F è diversa da mg (tranne
nell’origine del moto), in quanto c’è l’apporto della componente ma dipendente
dall’accelerazione.
relazione 1
37
relazione 1
38