Note di
Fisica Matematica II: Meccanica
Analitica
29 Settembre, 2008
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Le presenti NOTE di non vogliono in nessun modo essere un
testo ma un semplice ausilio per lo studio del corso, per questo
motivo la trattazione μe succinta. Anzi, μe opportuno approfondire
e studiare criticamente quanto svolto a lezione avvalendosi di testi
veri e propri. Tra i testi piμ
u noti si possono ricordare i seguenti:
- V.I. Arnold, Metodi Matematici della Meccanica Classica. Editori Riuniti 1986.
- G. Dell'Antonio, Elementi di Meccanica. I: Meccanica Classica.
Liguori Editore 1996.
- G. Gallavotti, Meccanica Elementare, Ed. Boringhieri 1986.
- A. Fasano, S. Marmi, Meccanica Analitica, Ed. Boringhieri
1994.
Meno moderni ma sempre ricchi di interessanti spunti ed osservazioni sono i seguenti:
- T. Levi-Civita, Lezioni di Meccanica Razionale, Ed. Zanichelli,
Ristampa anastatica 1974 (ed. 1929)
- E. Mach, La Meccanica nel suo Sviluppo Storico-Critico, Ed.
Boringhieri 1992 (prima edizione del 1883)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Sommario
1
Dinamica del punto : : : : : : : : : : : : : : : : : : : : : : : : : : : : : :
1.1 Dinamica del punto su traiettoria prestabilita . . . . . .
1.1.1 Equazioni di®erenziali del moto . . . . . . . . . . . . .
1.1.2 Caso di forze posizionali: soluzione per
quadrature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Oscillatore armonico smorzato e forzato . . . . . . . . . . .
1.2.1 Forze di richiamo e forze viscose . . . . . . . . . . . .
1.2.2 Oscillatore armonico smorzato . . . . . . . . . . . . . .
1.2.3 Oscillatore armonico smorzato e forzato . . . . . .
1.3 Analisi qualitativa del moto . . . . . . . . . . . . . . . . . . . . .
1.3.1 Studio del moto alla Weierstrass . . . . . . . . . . . .
1.3.2 Diagramma delle fasi . . . . . . . . . . . . . . . . . . . . . .
1.3.3 Analisi del moto alla Weierstrass per
l'oscillatore armonico . . . . . . . . . . . . . . . . . . . . . .
1.3.4 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Pendolo semplice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4.1 Equazione di®erenziale del moto . . . . . . . . . . . .
1.4.2 Piccole oscillazioni del pendolo semplice . . . . . .
1.4.3 Analisi del moto alla Weierstrass per il
pendolo semplice . . . . . . . . . . . . . . . . . . . . . . . . .
1.4.4 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Moto di un punto soggetto ad una forza centrale . . .
1.5.1 Integrali primi del moto . . . . . . . . . . . . . . . . . . .
1.5.2 Forza centrale . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.3 Integrazione delle equazioni del moto . . . . . . . .
1.5.4 Stabilitμa delle orbite circolari . . . . . . . . . . . . . . .
1
1
1
2
4
4
4
7
15
15
20
26
27
28
28
29
29
32
32
32
33
35
38
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
VIII
2
3
Sommario
1.5.5 Appendice: composizione di moti periodici . . .
1.5.6 Esempio di forza centrale attrattiva
direttamente proporzionale alla distanza . . . . .
1.5.7 Analisi del moto alla Weierstrass per il
problema di Keplero . . . . . . . . . . . . . . . . . . . . . .
1.5.8 Orbite chiuse e condizione sul potenziale . . . . .
1.6 Moto di un punto su una super¯cie prestabilita . . . .
1.6.1 Considerazioni preliminari. . . . . . . . . . . . . . . . . .
1.6.2 Moto di un punto pesante sopra una
super¯cie di rotazione ad asse verticale e
priva di attrito. . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.3 Pendolo sferico. . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7 Dinamica relativa del punto . . . . . . . . . . . . . . . . . . . . .
1.7.1 In°uenza della rotazione terrestre sul moto
dei gravi nel vuoto . . . . . . . . . . . . . . . . . . . . . . . .
1.7.2 Pendolo di Focault . . . . . . . . . . . . . . . . . . . . . . . .
1.7.3 Nozioni elementari di meccanica celeste . . . . . .
39
Dinamica dei solidi : : : : : : : : : : : : : : : : : : : : : : : : : : : : : :
2.1 Equazioni di Eulero . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 Solidi in rapida rotazione e fenomeni
giroscopici elementari . . . . . . . . . . . . . . . . . . . . . .
2.2 Solido pesante con un punto ¯sso . . . . . . . . . . . . . . . .
2.2.1 Integrali primi . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.2 Equazioni di®erenziali del moto . . . . . . . . . . . . .
2.3 Giroscopio pesante . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Terzo integrale primo . . . . . . . . . . . . . . . . . . . . . .
2.4 Rotazioni uniformi del giroscopio pesante . . . . . . . . .
2.4.1 Determinazione dell'angolo di nutazione . . . . .
2.4.2 Discussione del moto di precessione Ã(t) . . . . .
2.5 Trottola veloce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6 Stabilitμa del moto del giroscopio pesante. . . . . . . . . . .
2.6.1 Stabilizzazione giroscopica e trottola
"addormentata". . . . . . . . . . . . . . . . . . . . . . . . . . .
65
65
41
42
47
48
48
49
51
55
55
58
61
67
69
69
70
71
71
72
76
81
83
86
86
Equazioni di Lagrange : : : : : : : : : : : : : : : : : : : : : : : : : : : 91
3.1 Principio del d'Alembert e relazione simbolica della
Dinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Sommario
3.2 Equazioni di®erenziali del moto di un sistema
olonomo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Funzione Lagrangiana . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Coordinate cicliche e Lagrangiana ridotta . . . . . . . . .
3.5 Esempio: problema di Keplero. . . . . . . . . . . . . . . . . . . .
3.6 Integrazione per quadrature del giroscopio pesante . .
4
5
IX
92
94
94
97
100
Piccole oscillazioni : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : :
4.1 Teorema di Dirichlet . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Moto delle piccole oscillazioni . . . . . . . . . . . . . . . . . . . .
4.3 Caso unidimensionale . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Coordinate normali e frequenze proprie . . . . . . . . . . .
4.5 Schema riassuntivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6 Esempi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.1 Pendoli accoppiati: esempio di calcolo di
modi normali e battimenti . . . . . . . . . . . . . . . . .
4.6.2 Bipendolo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
103
103
105
107
108
111
112
Equazioni canoniche di Hamilton : : : : : : : : : : : : : : : :
5.1 Forma hamiltoniana dei sistemi lagrangiani . . . . . . . .
5.2 Trasformata di Legendre . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Funzione Hamiltoniana nel caso dinamico . . . . . . . . .
5.4 Esempi di funzione Hamiltoniana . . . . . . . . . . . . . . . .
5.4.1 Punto libero . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.2 Solido con punto ¯sso . . . . . . . . . . . . . . . . . . . . .
5.5 Signi¯cato ¯sico dei momenti coniugati . . . . . . . . . . .
5.5.1 Signi¯cato ¯sico della costante del moto
ph quando la coordinata ciclica qh μe una
coordinata cartesiana . . . . . . . . . . . . . . . . . . . . . .
5.5.2 Signi¯cato ¯sico della costante del moto ph
quando la coordinata ciclica qh μe un angolo . . .
5.6 Flusso Hamiltoniano e teorema di Liouville . . . . . . . .
5.6.1 Flusso Hamiltoniano . . . . . . . . . . . . . . . . . . . . . .
5.6.2 Flusso Hamiltoniano per l'oscillatore armonico
5.6.3 Teorema di Liouville . . . . . . . . . . . . . . . . . . . . . .
5.7 Coordinate cicliche | formalismo Hamiltoniano . . . .
5.8 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
117
117
120
122
123
123
124
125
112
115
126
127
128
128
130
131
134
135
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
X
Sommario
6
Principio variazionale di Hamilton. : : : : : : : : : : : : : :
6.1 Premesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Principio variazionale di Hamilton . . . . . . . . . . . . . . . .
6.3 Esempi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Moto di un grave . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.2 Oscillatore armonico . . . . . . . . . . . . . . . . . . . . . .
6.4 Equazioni di Eulero . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5 Esercizi (risolti) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
137
137
137
140
140
141
142
144
7
Trasformazioni canoniche : : : : : : : : : : : : : : : : : : : : : : : :
7.1 Struttura canonica delle equazioni di Hamilton . . . . .
7.1.1 Trasformazioni che conservano la struttura
canonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1.2 Determinazione della nuova Hamiltoniana
per e®etto di una trasformazione che conserva
la struttura canonica . . . . . . . . . . . . . . . . . . . . . .
7.2 Trasformazioni canoniche . . . . . . . . . . . . . . . . . . . . . . .
7.3 Generatrice di una trasformazione canonica . . . . . . . .
7.4 Esempio: trasformazione canonica per l'oscillatore
armonico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
151
151
8
Parentesi di Poisson : : : : : : : : : : : : : : : : : : : : : : : : : : : : :
8.1 De¯nizione della parentesi di Poisson . . . . . . . . . . . . .
8.1.1 Esempio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Proprietμa principali . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3 Applicazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
161
161
161
162
164
9
Equazione di Hamilton-Jacobi : : : : : : : : : : : : : : : : : : :
9.1 Equazione di Hamilton-Jacobi . . . . . . . . . . . . . . . . . . .
9.2 Hamiltoniana indipendente da t ed azione ridotta . .
9.3 Esempio: l'oscillatore armonico . . . . . . . . . . . . . . . . . .
9.4 Metodo di separazione delle variabili . . . . . . . . . . . . . .
9.5 Esempi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.5.1 L'equazione di Hamilton-Jacobi per il moto
centrale di un punto in un piano . . . . . . . . . . . .
9.5.2 Il metodo di Hamilton-Jacobi applicato al
problema di Keplero . . . . . . . . . . . . . . . . . . . . . .
167
167
169
170
171
173
151
153
155
156
158
173
175
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Sommario
A Complementi : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : :
A.1 Serie di Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.1 Serie di Fourier in forma trigonometrica . . . . . .
A.1.2 Serie di Fourier in forma esponenziale . . . . . . .
A.1.3 Stima dei coe±cienti cn . . . . . . . . . . . . . . . . . . . .
A.2 Teorema di annullamento degli integrali . . . . . . . . . . .
XI
179
179
179
180
181
182
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1
Dinamica del punto
1.1 Dinamica del punto su traiettoria prestabilita
1.1.1 Equazioni di®erenziali del moto
La dinamica di un punto P si fonda sull'equazione che deve essere
soddisfatta durante il moto
ma = F + Á
(1.1)
dove m μe la massa del punto, F μe la risultante di tutte le forze attive
agenti sul punto e Á la risultante di tutte le reazioni vincolari.
Supponendo nota la traiettoria ° del punto P soggetto alla (1.1)
allora per caratterizzare il moto non rimane che da determinare
la legge oraria. Piμ
u precisamente, se s (ascissa curvilea di P )
μe la lunghezza dell'arco ° fra una arbitraria origine e P , misurata
positivamente in un pre¯ssato verso, la (1.1) proiettata, in ciascun
punto della °, sulla rispettiva tangente, orientata nel verso delle s
crescenti, diventa:
mÄ
s = Ft + ©t
(1.2)
dove la componente tangenziale ©t di © μe, per lo piμ
u, incognita.
Tuttavia vi sono dei casi in cui la ©t μe preventivamente assegnabile.
In particolare: un punto vincolato a restare su di una curva
priva di attrito si muove su di essa come se fosse esclusivamente soggetto all'azione della forza attiva (tangenziale),
cio¶e ©t = 0. In tal caso la (1.2) prende la forma
mÄ
s = Ft
(1.3)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2
1 Dinamica del punto
dove la componente tangenziale Ft della forza totale μe una funzione
f(s;
_ s; t) nota, quindi la (1.3) assumerμa la forma
mÄ
s = f(s;
_ s; t)
(1.4)
e, nell'ipotesi di limitatezza, continuitμa e derivabilitμa nei tre argomenti della f, la (1.4) ammette una, ed una sola, soluzione (nel
dominio considerato) soddisfacente alle condizioni iniziali assegnate. La (1.3) (piμ
u precisamente nella forma (1.4)) prende il nome
di equazione di®erenziale del moto ed μe su±ciente per caratterizzare univocamente il moto di un punto vincolato a percorrere
una traiettoria assegnata in assenza di attrito.
1.1.2 Caso di forze posizionali: soluzione per quadrature
Nel caso di forze posizionali Ft = f(s) la (1.3) assume la forma
mÄ
s = f(s)
(1.5)
Per mostrare come la (1.5) si riduca con una quadratura ad una
equazione del I ± ordine ricordiamo che l'energia cinetica T del
punto μe qui de¯nita da 12 ms_ 2, da cui risulta: dT
= msÄ
_s. Osserdt
vando che, essendo f funzione della sola s, esiste un'altra funzione
U della sola s tale che
dU
= f (s):
ds
(1.6)
In virtμ
u della (1.5) segue che dT
= dU
s.
_ Il secondo membro, in
dt
ds
quanto si consideri U come funzione di t tramite s(t), non μe altro
che la derivata di U = U [s(t)] rispetto a t. Integrando rispetto a
t e designando con E la costante di integrazione, si ricava:
T ¡ U = E:
(1.7)
Questa relazione in termini ¯niti, tra la energia cinetica T del
punto P e la sua posizione sulla curva (caratterizzata dalla funzione U(s)), si chiama integrale delle forze vive. Esso fornisce,
in ultima analisi, una relazione fra s e s.
_
Nota. Nel caso in cui si suppone prestabilita la traiettoria si
perviene alla (1.7) senza bisogno di introdurre l'ipotesi che la forza
totale F sia conservativa, basta infatti che essa sia posizionale
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.1 Dinamica del punto su traiettoria prestabilita
3
perchμe la (1.6) valga limitatamente alla mobilitμa del punto sopra
la curva °.
Nota. Dalla (1.7) deriva che:
T1 ¡ T0 = U1 ¡ U0 ;
essendo T0 e U0 , T1 e U1 i valori di T e di U in due generici istanti
t0 e t1 . In particolare, consideriamo due punti materiali distinti
di egual massa che siano fatti partire con la medesima velocitμa da
una medesima posizione, oppure da due posizioni appartenenti alla
medesima super¯cie U = cost:. Se questi due punti si muovono
sotto l'azione di una forza derivante dal potenziale U, l'uno libero
e l'altro costretto a restare sopra una curva priva di attrito,
essi attraversano ciascuna super¯cie equipotenziale con equale velocitμa. Cosμ³, ad esempio, se due punti pesanti cadono, a partire
dalla quiete, uno liberamente, l'altro sopra un sostegno prestabilito (privo di attrito), dopo essere discesi di una stessa quota,
hanno la stessa velocitμ
a.
Torniamo al problema dell'integrazione della equazione (1.5)
del moto; ponendo
u(s) =
2
[U(s) + E] ;
m
(1.8)
l'equazione delle forze vive (1.7) si puμo scrivere
Ã
ds
dt
!2
= u(s);
da cui
q
ds
= § u(s);
dt
(1.9)
dove va preso il segno positivo o negativo secondo che la vesia positiva o negativa. La (1.9) μe una equazione
locitμa scalare ds
dt
di®erenziale del I ± ordine, sostanzialmente equivalente all'originaria equazione (1.5), che puμ
o essere integrata mediante una
quadratura e fornisce la cercata relazione in termini ¯niti
tra s e t. Le due costanti arbitrarie da cui essa deve dipendere
sono date l'una dalla costante additiva dell'ultima quadratura, l'altra dall'integrale E delle forze vive.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
4
1 Dinamica del punto
1.2 Oscillatore armonico smorzato e forzato
1.2.1 Forze di richiamo e forze viscose
Fra le forze posizionali meritano speciale attenzione le cosiddette
forze di richiamo, verso un'assegnata posizione O della curva
°. La proprietμa caratteristica di tali forze μe di annullarsi in O,
detta posizione di richiamo, e di esplicarsi, in ogni altro punto
della °, come attrazioni (tangenziali) verso O, crescenti quanto
piμ
u ci si allontana da O lungo la curva. In particolare si ha che
sf (s) < 0, supponendo che O abbia ascissa curvilinea s = 0 e
μ questo il comportamento tipico delle forze
dove f(s) = Ft (s). E
elastiche. Una espressione tipica di una forza elastica di richiamo
μe data da:
f (s) = ¡¸s
(1.10)
dove ¸ μe una assegnata costante positiva.
Le forze viscose dipendono, invece, dalla velocitμa del punto e
tendono, sempre, ad opporsi al moto del punto. La piμ
u semplice
espressione di una forza viscosa ha la forma
F = ¡bv
dove v μe la velocitμa del punto e b μe una assegnata costante positiva.
1.2.2 Oscillatore armonico smorzato
Si usa designare con questo nome un sistema meccanico costituito
da un punto materiale di massa m soggetto ad una forza elastica
e ad una forza viscosa. L'equazione di®erenziale del moto prende
la forma
mÄ
s + bs_ + ¸s = 0:
Ponendo poi h =
b
2m
e!=
q
¸
m
allora questa si scrive
sÄ + 2hs_ + ! 2s = 0;
(1.11)
che μe una equazione di®erenziale del II ordine, lineare, a coe±cienti costanti e omogenea. La soluzione generale μe, tranne un caso
particolare (in cui z1 = z2 ), data da
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.2 Oscillatore armonico smorzato e forzato
5
s(t) = C1ez1 t + C2 ez2 t
dove
z1;2 = ¡h §
p
h2 ¡ ! 2
sono le soluzioni, reali o complesse, della equazione di secondo
grado
z 2 + 2hz + ! 2 = 0:
Ai ¯ni della discussione che segue conviene porre la soluzione generale nella forma
s(t) = C1 e¡¯1 t + C2 e¡¯2 t ;
dove ¯1;2 = ¡z1;2 :
(1.12)
Nota. Mettiamo in luce la seguente proprietμa: qualunque siano
h e ! 2 , purch¶e sia h > 0, allora
<z1;2 < 0;
cio¶e <¯1;2 > 0:
(1.13)
Infatti, essendo z1;2 soluzioni dell'equazione di secondo grado,
segue che
z1 + z2 = ¡2h e z1z2 = ! 2:
(1.14)
Se z1;2 sono numeri reali allora, dalla seconda condizione (1.14),
essi hanno segno concorde e questo, dalla prima condizione (1.14),
μe negativo. Se, invece, z1;2 sono numeri complessi allora, essendo
i coe±cienti della equazione reali, essi sono tra loro complessi coniugati, cio¶e z2 = z¹1, e la condizione (1.14) si traduce in
2<z1 = ¡2h e jz1j2 = ! 2
(1.15)
che pone immediatamente al risultato cercato.
In virtμ
u della proprietμa (1.13) e ricordando che
e¡¯1;2 t = e¡<¯1;2 t e¡i=¯1;2 t
dove e¡i=¯1;2 t ha modulo 1, segue che la soluzione (1.12) s(t) della
equazione (1.11), per assegnate condizioni iniziali, tende asintoticamente a zero, per t crescente, in modo esponenziale.
Premesso questo risultato generale (e di importanza rilevante
nello studio della stabilitμa dei sistemi) andiamo a discutere in dettaglio la forma della soluzione generale in funzione dei valori dei
parametri. Si hanno i seguenti tre casi:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
6
1 Dinamica del punto
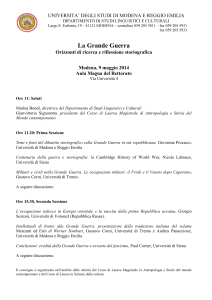
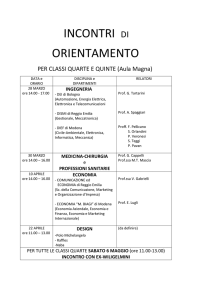
Moto aperiodico smorzato: h2 > ! 2 .
In questo caso abbiamo che ¯1;2 2 R+ ed il moto ha, al piμ
u, una
sola inversione del moto (Figura 1.1).
0.2
0.1
0
–0.1
–0.2
1
2
3
4
5
6
t
Fig. 1.1. Gra¯co della legge oraria nel caso di moto aperiodico smorzato.
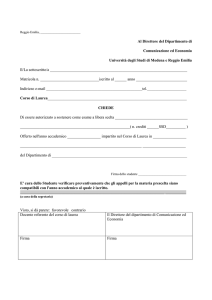
Moto oscillatorio smorzato: h2 < ! 2 .
In questo caso ¯1;2 sono complessipconiugati e si possono scrivere come ¯1;2 = h § ik dove k = ! 2 ¡ h2 ; con tale posizione
la soluzione generale prende la forma (prendendo le costanti arbitrarie C1 e C2 complesse coniugate tra loro e facendo un po' di
conti)
³
s(t) = C1e¡ht e¡ikt + C2e¡ht eikt = e¡ht C1 e¡ikt + C2 eikt
´
= Ce¡ht cos(kt + °):
Risulta quindi essere un moto oscillatorio, di pulsazione k, con
ampiezza data da Ce¡pt che decresce esponenzialmente. Il numero T = 2¼=k prende il nome di pseudo-periodo (Figura
1.2). Osserviamo che nel caso limite di assenza di smorzamento
h = 0 allora la soluzione generale prende la ben nota forma
s(t) = C cos(kt + °) caratteristica delle oscillazioni armoniche di
periodo 2¼=k.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.2 Oscillatore armonico smorzato e forzato
7
1
0.5
0
–0.5
–1
1
2
3
4
5
6
t
Fig. 1.2. Gra¯co della legge oraria nel caso di moto oscillatorio smorzato.
Moto aperiodico smorzato con smorzamento critico: h2 = !2 .
In questo caso z1;2 = ¡h sono reali e coincidenti; la soluzione
generale non ha piμ
u la forma (1.12) bensμ³
s(t) = C1 e¡ht + C2 te¡ht:
L'andamento della funzione s(t) presenta, sostanzialmente, le stesse
caratteristiche del primo caso (Figura 1.1).
1.2.3 Oscillatore armonico smorzato e forzato
Se ammettiamo la presenza di un termine forzante che dipende,
in modo periodico, dal tempo t allora l'equazione di®erenziale da
studiare risulta essere la seguente:
mÄ
s + bs_ + ¸s = Q(t)
(1.16)
dove Q(t) μe una funzione periodica assegnata e dove b ¸ 0 e ¸ 6= 0.
L'equazione di®erenziale (1.16) del II ordine, lineare, a coe±cienti
costanti e completa ha soluzione generale della forma
s(t) = s0 (t) + s?(t)
dove s0 (t) μe la soluzione generale della omogenea associata (1.11)
e dove s? (t) μe una soluzione particolare della completa.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
8
1 Dinamica del punto
Nota. In virtμ
u delle osservazioni fatte in precedenza possiamo
a®ermare che, a regime, la funzione s(t) μe data solamente dalla
soluzione particolare; infatti, comunque siano state assegnate le
costanti arbitrarie, la funzione so (t) decresce esponenzialmente e
quindi, dopo un certo intervallo di tempo (detto transitorio), segue
che s(t) ¼ s? (t).
Caso di forzante di tipo armonico
Supponendo, al momento, che il termine forzante Q(t) sia una
data da
funzione armonica di periodo T1 = 2¼
−
Q(t) = q sin(−t + ®);
dove q > 0, − > 0 e ® sono costanti assegnate. Ricerchiamo la
soluzione particolare della forma
s? (t) = p sin(−t + ')
(1.17)
dove p e ' sono da determinarsi sostituendo la (1.17) nella equazione
completa (1.16) e richiedendo che questa sia identicamente soddisfatta. Operando la sostituzione si ottiene
(! 2 ¡ − 2)p sin(−t + ') + 2h−p cos(−t + ') = q sin(−t + ®)=m
che, in virtμ
u delle formule trigonometriche di addizione, si trasforma
nella
a sin(−t + ®) + b cos(−t + ®) = 0
dove, ponendo Á = ® ¡ ',
a = p[(! 2 ¡ − 2 ) cos Á + 2h− sin Á] ¡ q=m
e
b = p[¡(! 2 ¡ − 2) sin Á + 2h− cos Á]:
Deve quindi essere veri¯cato il seguente sistema
(
a=0
b =0
)
(
p[(! 2 ¡ − 2 ) cos Á + 2h− sin Á] = q=m
:
¡p[(! 2 ¡ − 2 ) sin Á + 2h− cos Á] = 0
Quadrando e poi sommando si ottiene immediatamente:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.2 Oscillatore armonico smorzato e forzato
p=
9
A(− 2)q
1
(1.18)
dove A(− 2) = q
m
(! 2 ¡ − 2)2 + 4h2 − 2
mentre dalla seconda si ottiene immediatamente che deve essere
tan(Á) =
2h−
;
¡ −2
!2
con che l'angolo Á (ritardo di fase) risulta individuato subordinatamente alla condizione ¡¼=2 < Á · ¼=2. Risulta che tan(Á) μe
positiva o negativa, e quindi Á μe maggiore o minore di 0, secondo
che − 2 < ! 2 o − 2 > ! 2 .
μ immediato veri¯care che
Nota. E
lim A(− 2) =
−!0+
1
!2
e
lim A(− 2 ) = 0:
−!+1
Energia fornita al sistema vibrante
Osserviamo che nelle oscillazioni forzate viene fornita energia al
sistema vibrante per e®etto della sollecitazione addizionale Q(t).
In particolare l'energia e fornita durante un intero periodo T1 =
2¼=− μe data dal lavoro svolto dal termine forzante:
e=
Z
t+T1
t
Q(t0) ¢ v(t0 )dt0 =
Z
t+T1
Q[s(t0)]s(t
_ 0 )dt0 ;
(1.19)
t
e, sostituendo a Q l'equazione del moto (1.16), segue
e=
Z
t
t+T1
h
i
msÄ
_ s + bs_ 2 + ¸ss_ dt0
Z t+T1
i
mh 2
2 2 t+T1
=
s_ + ! s
+ 2hm
s_ 2dt0 :
t
2
t
A regime stabilito si ha che s = s0 + s? ¼ s? e, per la periodicitμa
di s? , la parte integrata va a zero e da ciμo
e ¼ 2hm
Z
t+T1
(s_? )2 dt0:
t
Questa formula mostra che l'energia fornita e risulta essenzialmente positiva, ossia che, per mantenere le oscillazioni forzate,
bisogna comunicare energia al sistema vibrante. Si puμo,
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
10
1 Dinamica del punto
in¯ne, aggiungere che a regime stabilito la soluzione μe data dalla
s? (t) (vedi (1.17)) e quindi e non dipende dall'istante t considerato
ma, solamente, dal periodo T1 = 2¼=−. Piμ
u precisamente:
e ¼ 2hm
Z
T1
0
= 2hmp2−
(s_ ? )2dt = 2hm
Z
Z
T1
p2 − 2 [cos(−t + ')]2 dt
0
2¼¡'
¡'
[cos(μ)]2 dμ = 2¼hmp2 −:
Caso ideale di uno smorzamento nullo
Mettiamoci nel caso dell'ipotesi ideale dell'assoluta assenza di ogni
resistenza passiva (h = 0) e cerchiamo di determinare per la corrispondente equazione
sÄ + ! 2s = q sin(−t)=m
(1.20)
una soluzione periodica della forma (1.17) (μe sempre possibile assumere la fase iniziale ® nulla in virtμ
u di una opportuna scelta
dell'origine dei tempi t ! t ¡ ®=−). Sostituendo e uguagliando si
ottiene
q
Á=0 e p=
2
m(! ¡ − 2)
purchμe ! 6= −.
Se poi si ha − = !, cio¶e se il periodo della forza addizionale
μe identico a quello delle vibrazioni spontanee del sistema, si ha
una contraddizione nel ricercare una soluzione periodica del tipo
(1.17); ma si veri¯ca che la (1.20), per ! = −, ammette l'integrale
particolare
q
t sin(!t);
s?(t) =
2m! 2
il quale corrisponde ad oscillazioni del medesimo periodo ma che
sono di ampiezza inde¯nitamente crescente col tempo.
Risonanza
Tenendo ¯sse le costanti h e ! caratteristiche del sistema vibrante
e l'intensitμa massima q della forza addizionale e facendone variare
la frequenza − vediamo come vari conseguentemente l'ampiezza p
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.2 Oscillatore armonico smorzato e forzato
11
dell'oscillazione forzata corrispondente o, equivalentemente, il fattore di ampli¯cazione A(− 2 ). In particolare la A(− 2 ) ammetterμa
un unico massimo raggiunto, se h μe piccola, per j−j in prossimitμa di
j!j. Da qui segue la spiegazione del fenomeno della risonanza.
Per studiare il fenomeno della risonanza riprendiamo la (1.18)
ponendo
−2
4h2
=
x;
= ²2 ;
!2
!2
da cui
A(− 2 ) =
1
1
f(x); f (x) = q
:
2
!
(1 ¡ x)2 + ²2 x
(1.21)
La funzione f (x) ammette punti di stazionarietμa x > 0 quando
¡2(1 ¡ x) + ²2 = 0; cio¶e x = 1 ¡ ²2 =2:
In particolare questo risulta essere un punto di massimo relativo
per f(x) (poich¶e la derivata seconda del radicando al denominatore
μe positiva e quindi il radicando ha un punto di minimo relativo).
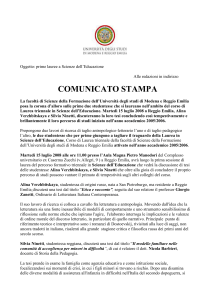
Quindi A(− 2 ) ammette un unico punto di massimo per − 2 =
! 2 ¡ 2h2 avente valore (Figura 1.3)
1
Amax = A(! 2 ¡ 2h2 ) = q
4h4 + 4h2 (! 2 ¡ 2h2 )
=
1
p
:
2h ! 2 ¡ h2
Nota. Nel caso di smorzamento lieve (h ¿ 1) il punto di massimo relativo si ha in corrispondenza di − 2 ¼ ! 2 , cio¶e quando la
frequenza del termine forzante μe prossima alla frequenza naturale
del sistema, ed inoltre
Amax ¼
1
À 1:
2!h
Battimenti
Il fenomeno noto con il nome di battimenti si veri¯ca per la
sovrapposizione di oscillazioni armoniche con frequenze diverse.
Tale caso si veri¯ca, ad esempio, quando consideriamo il caso ideale di smorzamento nullo (cio¶e h = 0) e soggetto ad un termine
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
12
1 Dinamica del punto
12
10
ε=0.08
ε =0.1
ε=0.2
ε=0.4
8
6
4
2
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
x
Fig. 1.3. Gra¯co della funzione (1.21) per diversi valori di ².
forzante oscillatorio. In questo frangente non posiamo piμ
u a®er?
mare che s(t) ¼ s (t) perch¶e il termine s0 (t) ha ampiezza che
rimane costante nel tempo. Piμ
u precisamente, volendo studiare il
termine
s(t) = s0 (t) + s?(t);
dove
s0 (t) = A1 cos(!t + ®1) e s? (t) = A2 cos(−t + ®2 )
dove prendiamo A1 = A2 = A (altrimenti poniamo A1 = A2 + A~2
e isoliamo il termine con coe±ciente A~2 ). Con tale ipotesi allora
dalle formule di prostaferesi segue che
s(t) = 2A cos(²t + ¯) cos(¹
!t + ®
¹)
dove
−+!
−¡!
®1 + ®2
®1 ¡ ®2
; ²=
; ®
¹=
; ¯=
:
2
2
2
2
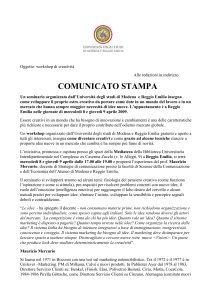
Il fenomeno diventa particolarmente evidente nel caso in cui − ¼
!; infatti si osserva che il fattore cos(¹
!t + ®
¹ ) produce una oscillazione che ha una frequenza molto vicina a quella dei moto
componenti. L'ampiezza di tale oscillazione risulta perμo modulata (lentamente) dal fattore cos(²t + ¯) la cui frequenza μe molto
minore di quella precedente (Figura 1.4).
!
¹=
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.2 Oscillatore armonico smorzato e forzato
13
1
0.5
0
–0.5
–1
20
40
60
80
100
t
Fig. 1.4. Battimenti.
Caso di forzante periodica
Ai ¯ni della ricerca della soluzione particolare nel caso generale in
cui il termine forzante sia una generica funzione periodica, consideriamo inizialmente il caso h(t) = ½ei−t , dove ½ 2 C e − = 2¼
. In tal
T1
?
caso cerchiamo una soluzione (se esiste) della forma s (t) = rei−t ,
da cui
s_ ? (t) = i−rei−t
e sÄ? (t) = ¡− 2 rei−t:
La sostituzione di s? nella equazione di®erenziale (1.11) porta a
¡− 2 rei−t + i2h−rei−t + ! 2rei−t = ½ei−t =m
che, dovendo essere identicamente soddisfatta per ogni t (a±nch¶e
s? sia soluzione dell'equazione di®erenziale), implica
r=
da cui
!2
½=m
¡ − 2 + 2ih−
1
½
ei−t :
m ! 2 ¡ − 2 + 2ih−
Prima di passare al caso generale consideriamo il caso in cui
la funzione periodica Q(t) ammetta sviluppo in serie di Fourier di
tipo esponenziale ¯nito:
s? (t) =
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
14
1 Dinamica del punto
Q(t) =
N
X
cn ei−nt
n=¡N
dove cn = c¹¡n a±nch¶e Q(t) sia a valori reali. Una soluzione particolare, periodica di periodo T , μe quindi data da
s? (t) =
N
X
s?n (t); s?n (t) =
n=¡N
cn
1
ei−nt
m ! 2 ¡ n2− 2 + in2h−
dove s?n (t) μe soluzione particolare della equazione di®erenziale
sÄ + 2hs_ + ! 2 s = cn ei−nt=m
da quanto abbiamo appena dimostrato. La veri¯ca μe immediata:
?
?
2 ?
sÄ + 2hs_ + ! s =
N
³
X
sÄ?n + 2hs_ ?n + ! 2 s?n
´
n=¡N
=
N
X
cn ei−nt =m = Q(t)=m:
n=¡N
Rimane da trattare il caso in cui Q(t) ammette sviluppo in serie
in¯nita di Fourier
Q(t) =
+1
X
cn ei−nt :
(1.22)
n=¡1
Come nel caso precedente prendiamo come possibile soluzione particolare la serie di Fourier (per il momento formale):
s? (t) =
+1
X
n=¡1
s?n (t); s?n (t) =
1
cn ei−nt
m ! 2 ¡ n2 − 2 + i2nh−
(1.23)
e cerchiamo di stabilire se questa serie converge e, nel caso in cui
converga, se μe una soluzione della equazione di®erenziale. Come
nel caso precedente si veri¯ca facilmente che questa serie μe una
soluzione purch¶e converga abbastanza velocemente in modo da
poterne calcolare la derivata prima e seconda derivando la serie
termine a termine. Ricordiamo che per potere derivare k volte la
serie termine a termine, deve convergere la serie
+1
X
X
dk s?n (t)
1 +1
cn (i−n)k
=
ei−nt
k
2 ¡ n2 − 2 + i2nh−
dt
m
!
n=¡1
n=¡1
(1.24)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.3 Analisi qualitativa del moto
15
uniformemente rispetto a t; ricordiamo inoltre la seguente stima
dei coe±cienti della serie di Fourier: jcn j · cn¡r quando la funzione
Q(t) μe di classe C r . In virtμ
u di queste considerazioni abbiamo che
il termine n|esimo della serie (1.24) puμo essere stimato come
¯
¯
¯ c (i−n)k ei−nt =m ¯
¯ n
¯
¯ 2
¯·
¯ ! ¡ n2 − 2 + i2nh− ¯
q
c− k nk
nr (! 2 ¡ n2 − 2 )2 + 4n2 h2 − 2
· Cnk¡r¡2
per una qualche costante C > 0 indipendente da n. Troviamo
quindi che la serie (1.24) converge uniformemente rispetto a t se
r + 2 ¡ k > 1; in particolare si ha che la serie (1.23) μe soluzione
dell'equazione di®erenziale (1.16) se r + 2 ¡ 2 > 1 (k = 2), cio¶e se
la funzione Q(t) μe, almeno, di classe C 2 .
Possiamo riassumere questo risultato nel seguente teorema:
Teorema: Sia data la equazione (1.16) dell'oscillatore armonico smorzato e forzato, sia Q(t) una funzione periodica, di periodo
T1 , di classe C 2 e avente sviluppo di Fourier in forma esponenziale (1.22) dove − = 2¼=T1 . Allora la serie di Fourier (1.23)
converge uniformemente per ogni t 2 [0; T1] ed μe una soluzione
della equazione (1.16).
Nota. Analiziamo ora in cosa si traduce il fenomeno della
risonanza nel caso generale in cui Q(t) ammette uno sviluppo di
Fourier del tipo (1.22). Sotto l'ipotesi che Q 2 C 2 si μe provato
che la soluzione particolare ha forma (1.23). Allora si vede subito
che, prendendo anche
h i qui h su±cientemente piccolo, le armoniche
di indice n§ = § −! , dove [¡] denota il numero intero piμ
u vicino,
vengono ampli¯cate, infatti per tali valori di n il denominatore
assume valore minimo, mentre le altre armoniche sono smorzate.
1.3 Analisi qualitativa del moto
1.3.1 Studio del moto alla Weierstrass
Consideriamo il caso in cui la forza F applicata al punto libero
P μe conservativa (o, almeno nel caso uni-dimensionale, sia posizionale); allora le equazioni (1.1) ammettono l'integrale (primo)
delle forze vive
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
16
1 Dinamica del punto
T ¡ U = E;
dove E μe l'energia totale costante. Riprendiamo la corrispondente
equazione delle forze vive (1.9)
s_2 = u(s);
(1.25)
dove
u(s) =
2
du
dU
[U(s) + E] e
=
= f(s) = Ft (s): (1.26)
m
ds
ds
La (1.25) μe una conseguenza necessaria della equazione fondamentale (1.5) mÄ
s = f(s). Perciμo l'andamento del moto si puμo
desumere dalla (1.25) anzich¶e dalla originaria (1.5).
Circa l'equazione (1.25) supponiamo, per ¯ssare le idee, che la
funzione u(s), per tutti i valori di s che volta a volta considereremo,
sia ¯nita e continua insieme con le sue derivate di tutti gli ordini.
Denotiamo con s0 e s_ 0 la ascissa curvilinea e la velocitμa scalare del
punto all'istante iniziale.
Dalla (1.25) distinguamo, in ordine alle condizioni iniziali, due
casi:
a) se s_ 0 = 0, ovvero s_ 20 = u(s0 ) = 0;
b) se s_ 0 6= 0, ovvero s_ 20 = u(s0 ) > 0.
Caso di velocitμ
a iniziale nulla: s_ 0 = 0.
Consideriamo inizialmente il caso a) s_0 = 0. In questo caso il moto,
al suo inizio, non μe completamente caratterizzato dall'equazione
delle forze vive (1.25) ed μe necessario fare un distinguo:
a1) s0 μe radice semplice di u(s), cio¶e
du(s0 )
f(s0 )
=2
6= 0:
ds
m
In virtμ
u della legge del moto incipiente (in base alla quale, per
l'annullarsi della velocitμa iniziale, il mobile segue il verso della
forza attiva Ft = m2 du
che, per s = s0 , μe non nulla) si ha che
ds
il mobile si mette in moto e, subito dopo l'istante iniziale, ci
troviamo nella condizione b).
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.3 Analisi qualitativa del moto
17
a2) s0 μe una radice multipla di u(s), cio¶e
f(s0 )
du(s0 )
=2
= 0:
ds
m
In questo caso s ´ s0 soddisfa l'equazione del II ± ordine (1.5)
_ 0 ) = 0. Quindi il mobile
con le condizioni iniziali s(t0) = s0 e s(t
rimane in equilibrio nella posizione iniziale s0.
Caso di velocitμ
a iniziale non nulla: s_ 0 6= 0.
Consideriamo ora il caso b) s_ 0 6= 0. In questo caso il moto, al suo
inizio, μe completamente caratterizzato dall'equazione delle forze
vive (1.25) scritta nella forma
q
s_ = § u(s)
(1.27)
Possiamo sempre assumere, senza perdere in generalitμa, che sia
s_0 > 0 (altrimenti μe su±ciente cambiare orientazione alla traiettoria) e quindi:
q
s_ 0 = + u(s0 ):
Prestabilito questo segno, resta determinato anche quello della
equazione di®erenziale del I ± ordine (1.27) che caratterizza il moto
¯no a tanto che la velocitμa non si annulla, cio¶e ¯no a quando s non
raggiunge una radice di u(s). Qui si presentano due sottocasi distinti:
b1) a partire da s0 ¯no a +1, nel verso della velocitμa s_0 , non
si incontra mai una radice di u(s):
u(s) 6= 0; 8s > s0 ;
b2) esiste, dalla parte indicata di s_ 0, una prima radice s? di
u(s):
9s? > s0 : (u(s?) = 0 ^ u(s) > 0 8s 2 [s0; s? )) :
Nel caso b1) l'equazione μe integrabile per separazione di variabili ottenendo
Z s
ds
d»
q
dt = q
; da cui t(s) =
+ t0
(1.28)
s0
u(s)
u(»)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
18
1 Dinamica del punto
funzione continua, monotona crescente al crescere di s e de¯nita
per ogni s > s0 . Essa rappresenta il tempo che il mobile impiega
ad arrivare in s > s0 . Si ricava che per ogni s > s0 il mobile
passa in s in un tempo ¯nito, in questo caso si parla di moto
diretto (o retrogrado se s_ 0 < 0) aperiodico. La funzione
inversa s(t), pur essa monotona, fornisce l'equazione oraria del
moto considerato.
Nel caso b2) si ha, come per il caso b1), la scomposizione (1.28)
che fornisce t(s) monotona crescente de¯nita per ogni s0 < s <
s? . Quindi il mobile, se s? μe la prima radice di u(s) nel verso
indicato da s_0 , va, sempre muovendosi in un medesimo senso, dalla
posizione iniziale s0 ad ogni posizione s < s? in un tempo ¯nito:
t(s) =
Z
s
s0
d»
q
u(»)
+ t0 ; s0 · s < s?:
(1.29)
Analizziamo il tempo impiegato per raggiungere s? . Si distinguono
due casi:
b21) s? μe radice semplice di u(s);
b22) s? μe radice multipla di u(s).
Nel caso b21) avremo, per il Teorema di Lagrange, che in un
intorno (sinistro) di s? μe de¯nita una funzione »(s) 2 (s; s? ) tale
che
u(s) = (s? ¡ s)u0 [»(s)]
(1.30)
dove u0(s) < 0 per s in un intorno di s? poich¶e u(s) > 0 per ogni
s 2 (s0 ; s? ) e s? μe radice semplice di u(s). L'integrale generalizzato
?
?
t = t(s ) =
Z
s?
s0
ds
q
u(s)
+ t0 =
Z
s?
s0
ds
q
+ t0
p ?
s ¡ s u0 [»(s)]
converge poich¶e u0 [»(s)] 6= 0 in un intorno di s? . La funzione
t(s) : [s0 ; s?] ! [t0; t?]
μe monotona crescente (e continua) e quindi essa μe invertibile e la
sua inversa
s(t) : [t0; t? ] ! [s0 ; s?]
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.3 Analisi qualitativa del moto
19
?
?
μe la legge del moto del mobile per
q t nell'intervallo [t0 ; t ]. Per t = t
si ha che s(t? ) = s? e s(t
_ ?) = u(s? ) = 0 e quindi nell'istante t?
il mobile μe nelle condizioni di tipo a). Piμ
u precisamente, essendo
0 ?
nelle condizioni di tipo a1) poich¶e u (s ) < 0, allora il mobile si
mette in moto per t > t? di moto retrogrado. In conclusione:
nel caso in cui s? μ
e una radice semplice allora per ogni
?
s 2 (s0; s ) il mobile passa in s in un tempo ¯nito, arriva
in s? all'istante ¯nito t? ; in corrispondenza ad s? il mobile
ha velocitμ
a nulla e si ha una inversione del moto.
Nel caso b22) avremo, per il Teorema di Lagrange, che in un
intorno (sinistro) di s? μe de¯nita una funzione »(s) 2 (s; s? ) tale
che
1
u(s) = (s? ¡ s)2 u00 [»(s)]
2
e quindi l'integrale generalizzato
t(s? ) =
Z
s?
s0
ds
q
u(s)
+ t0 =
Z
s?
s
s0
2
ds
+ t0
¡s
u00 [»(s)] s?
non converge. Quindi, se s? μ
e radice multipla il mobile,
pur sempre con moto costantemente progressivo, si avvicina inde¯nitamente a questa posizione, senza mai raggiungerla (moto a meta asintotica).
Caso di moto periodico
Merita particolare attenzione il caso in cui la posizione iniziale s0
sia compresa fra due radici semplici s+ > s¡ consecutive di u(s):
u(s§ ) = 0; s0 2 (s¡ ; s+ ) e u(s) 6= 0 8s 2 (s¡ ; s+ ):
In tal caso si dimostra la periodicitμ
a del moto e si calcola il
periodo come:
T =2
Z
s+
s¡
ds
q
:
(1.31)
u(s)
Infatti, una volta arrivato il punto in s+ in un tempo
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
20
1 Dinamica del punto
Z
t+ =
s+
ds
q
u(s)
s0
+ t0
qui si arresta e poi si inverte il moto; quindi il mobile si rimette in
moto a partire da s+ nel verso delle ascisse decrescenti. Ripetendo
l'analisi
q appena svolta prendendo il segno negativo nella equazione
s_ = § u(s) si ottiene che il mobile arriva in s¡ all'istante
t¡ =
Z
s¡
s+
ds
q
¡ u(s)
+ t+ :
In¯ne in s¡ il mobile inverte nuovamente il moto ed arriva in s0
all'istante
T + t0 =
Z
s0
Z
s0
=
s¡
s¡
ds
q
+ t¡ =
q
+
u(s)
ds
u(s)
Z
s¡
s+
Z
s0
s¡
ds
q
+
u(s)
ds
q
¡ u(s)
+
Z
s¡
¡ u(s)
ds
q
+ t0
u(s)
s+
Z
s+
s0
ds
q
+ t+
da cui segue l'espressione (1.31) per T . Si osserva che inqs0 per
t = t0 +T il mobile ha la stessa velocitμa iniziale data da s_ = u(s0)
e quindi, per il Teorema di unicitμa della soluzione del problema di
Cauchy, il moto si riproduce con le stesse modalitμa.
1.3.2 Diagramma delle fasi
Ripartiamo dal Teorema di conservazione dell'energia meccanica,
piμ
u precisamente si ha che la grandezza meccanica
1 2
ms_ + V (s) = E
2
(1.32)
si conserva durante il moto dove
1
E = ms_ 20 + V (s0 )
2
e dove
V (s) = ¡U(s) = ¡
Z
f (s)ds
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.3 Analisi qualitativa del moto
21
denota l'energia potenziale. Dalla (1.32) segue immediatamente
che il moto del punto P su una curva ° prestabilita avviene nei
tratti di ° per i quali vale la condizione V (s) · E; cio¶e le regioni
fs 2 R : V (s) > Eg
sono interdette al moto del punto P dovendo essere s_ 2 ¸ 0. Osserviamo inoltre che durante il moto t ! s(t) non si puμo passare
tra due regioni distinte per la proprietμa di continuitμa della legge di
moto. I valori s, per i quali V (s) = E, dividono le diverse regioni
e sono cruciali per la discussione sul tipo di moto.
Fig. 1.5. Il moto del punto P puμ
o avvenire solamente all'interno delle regioni per
le quali E ¸ V (s). Nell'esempio in questione abbiamo associato ad E due moti
possibili, uno dei quali μe un moto periodico tra s¡ < s+ .
De¯niamo spazio delle fasi l'insieme R2 avente elementi (s; s).
_
Ad ogni punto (s; s)
_ nel piano delle fasi si associa, in modo univoco,
una posizione ed una velocit¶a del punto materiale sulla traiettoria.
Possiamo quindi identi¯care il moto del punto materiale con la
traiettoria del punto (non materiale) nel piano della fasi.
Sia de¯nita ora la funzione nello spazio delle fasi
1
E(s; s)
_ = ms_ 2 + V (s):
2
Per il teorema di conservazione dell'energia meccanica ogni traiettoria f(s(t); s(t))
_
2 R2 ; t 2 Rg nel piano delle fasi (s coincide
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
22
1 Dinamica del punto
con il parametro lagrangiano) μe contenuta in una curva di livello
di equazione
E(s; s)
_ =E
dove E = E(s0 ; s_ 0) si determina in base alle condizioni iniziali. Lo
studio del mobile P su ° viene e®ettuato studiando l'andamento
del corrispondente punto (immaginario) sulle curve di livello nello
spazio delle fasi. Le curve di livello sono simmetriche rispetto
all'asse delle ascisse s ed μe importante individuare gli eventuali
punti critici, cio¶e le coppie (s; s)
_ in cui non μe ben de¯nito il
vettore tangente alla curva di livello, cio¶e tali che
@E
@E
=0 e
=0 )
@s
@ s_
(
dV
V 0 (s) = 0
; V 0 (s) =
= ¡f (s)
s_
=0
ds
Si nota quindi che tutti i punti critici sono le coppie del piano
delle fasi (s; 0) dove s μe un punto di massimo, di minimo o di
°esso dell'energia potenziale V ; questi punti si dicono anche punti
stazionari. In corrispondenza a tali punti, poich¶e v = 0 e Ft = 0,
abbiamo traiettorie stazionarie per il mobile. Notiamo che al di
fuori di questi punti non esistono traiettorie stazionarie poich¶e
v 6= 0 o Ft 6= 0 e quindi la con¯gurazione corrispondente non μe di
equilibrio.
Nota. Ogni arco di curva di livello, non contenente punti critici,
μe percorso dalla evoluzione (s(t); s(t)),
_
t 2 R. Piμ
u precisamente la
curva μe percorsa da sinistra verso destra nel semipiano superiore
s_ > 0, nel semipiano inferiore s_ < 0 μe invece percorsa da destra
verso sinistra.
Nota. Se, inoltre, la curva μe chiusa allora il moto μe periodico
ed il periodo del moto μe
T =2
Z
s+
s¡
q
d»
2
[E
m
¡ V (»)]
dove s§ sono tali che V (s§ ) = E (osserviamo che i punti (s§ ; 0)
sono l'intersezione tra la curva chiusa e l'asse delle ascisse).
Nota. Se la curva di livello contiene un punto critico (¹
s; 0) con
s¹ corrispondente ad un punto di minimo per il potenziale, allora
le traiettorie possibili sulla curva di livello (almeno in un intorno
¯nito di (¹
s; 0)) si riducono alla sola traiettoria stazionaria (¹
s; 0).
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.3 Analisi qualitativa del moto
23
Nota. Se la curva di livello contiene un punto critico (¹
s; 0)
con s¹ corrispondente ad un punto di massimo o di °esso per
il potenziale, allora, essendo tale punto critico, esso stesso sarμa
una traiettoria stazionaria, ma la curva di livello consterμa di piμ
u
traiettorie: una traiettoria stazionaria e almeno due asintotiche,
cio¶e tali che
s; 0) per t ! §1:
(s§ (t); s_§ (t)) ! (¹
Vediamo ora in dettaglio come si dispongono le traiettorie nell'intorno di un punto critico corrispondente ad un minimo ed a un
massimo.
Caso I: s¹ μ
e un punto di minimo per il potenziale V
Tenendo conto che V 00 (¹
s) > 0 (per comoditμa facciamo questa
ipotesi), allora
1
1
E(s; s)
_ = ms_ 2 + V (¹
s) + V 00 (¹
s)(s ¡ s¹)2 + O((s ¡ s¹)3 )
2
2
1
1
¼ ms_ 2 + V (¹
s) + V 00 (¹
s)(s ¡ s¹)2
(1.33)
2
2
dove O((s ¡ s¹)3) rappresenta il resto ed μe un in¯nitesimo di ordine
superiore al secondo per s¡ s¹ ! 0. Quindi per E = E(¹
s; 0) = V (¹
s)
l'equazione E = E si riduce a
1 2 1 00
ms_ + V (¹
s)(s ¡ s¹)2 ¼ 0; V 00 (¹
s) > 0;
2
2
quindi abbiamo f(¹
s; 0)g come unica curva di livello. Mentre per
E > V (¹
s) la (1.33) μe, a meno di in¯nitesimi d'ordine superiore,
l'equazione di un ellisse di centro (¹
s; 0):
1 2 1 00
ms_ + V (¹
s)(s ¡ s¹)2 ¼ E ¡ V (¹
s) > 0:
2
2
Abbiamo quindi una traiettoria periodica corrispondente alla curva
di livello chiusa approssimata da un ellisse (Figura 1.6) e il mobile
oscilla tra i due valori s§ tali che V (s§ ) = E, dove V 0(s¡ ) < 0 e
V 0(s+ ) > 0, con periodo
T (E) = 2
Z
s+ (E)
s¡ (E)
q
d»
2
[E
m
¡ V (»)]
:
(1.34)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
24
1 Dinamica del punto
Fig. 1.6. Comportamento delle curve di livello in un intorno di un punto di minimo
relativo. Per energia E1 minore del minimo relativo V (¹
s) dell'energia potenziale
non sono ammessi moti (in un intorno del punto di minimo); per energia E2 coincidente con il minimo relativo dell'energia potenziale μe ammesso solamente il moto
stazionario s(t) = s¹; per energia E3 maggiore del minimo relativo dell'energia potenziale si ha un moto periodico tra s¡ < s+ attorno alla con¯gurazione di equilibrio
s¹.
Caso II: s
¹μ
e un punto di massimo per il potenziale V
Tenendo conto che V 00 (¹
s) < 0 (per comoditμa facciamo questa
ipotesi), allora
1
1
E(s; s)
_ = ms_ 2 + V (¹
s) + V 00 (¹
s)(s ¡ s¹)2 + O((s ¡ s¹)3)
2
2
dove O((s ¡ s¹)3) rappresenta il resto ed μe un in¯nitesimo di ordine
superiore al secondo per s ¡ s¹ ! 0. Quindi la curva di livello per
E = E(¹
s; 0) = V (¹
s) contiene 4 traiettorie asintotiche a (¹
s; 0) oltre
che a quella stazionaria f(¹
s; 0)g:
1
E(s; s)
_ = E =) 0 = E2 ¡ V (¹
s) ¼ m[s_ 2 ¡ c2 (s ¡ s¹)2 ];
2
dove
1
c2 = jV 00 (¹
s)j:
m
Per E 6= V (¹
s) (e comunque prossima su±cientemente ad V (¹
s)) si
tratta di rami di iperbole (a meno di in¯nitesimi di ordine superiore)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.3 Analisi qualitativa del moto
25
i
1 h 2
m s_ ¡ c2 (s ¡ s¹)2 = E ¡ V (¹
s) 6= 0
2
corrispondenti a due traiettorie con inversione del moto se E <
V (¹
s) e a due traiettorie che superano il colle se E > V (¹
s) (Figura
1.7).
Nel caso di punto di massimo o di °esso ci si puμo rendere conto
della presenza di traiettorie asintotiche (s(t); s(t))
_
! (¹
s; 0) per
t ! +1 o per t ! ¡1 poich¶e l'integrale generallizato
t(¹
s) ¡ t(s0) = §
Z
d»
s¹
s0
q
2
[V
m
(¹
s) ¡ V (»)]
;
che esprime il tempo impiegato dal mobile per andare da s0 a s¹
(supponendo V (¹
s) ¡ V (s) > 0, 8s 2 [s0; s¹)), risulterμa non convergente a causa dell'ordine in¯nito dell'integrando (ad esempio: di
ordine almeno 1 per punti di massimo e 3=2 per punti di °esso).
Fig. 1.7. Comportamento delle curve di livello in un intorno di un punto di massimo
relativo. Per energia E2 coincidente con il massimo relativo dell'energia potenziale
sono ammessi, oltre al moto stazionario s(t) = s¹, moti asintotici; per energie E1 e
E3 , rispettivamente, minori e maggiori del massimo relativo dell'energia potenziale
si hanno, rispettivamente, due traiettorie con e senza inversione del moto.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
26
1 Dinamica del punto
1.3.3 Analisi del moto alla Weierstrass per l'oscillatore armonico
Studiamo il moto di un punto vincolato a scorrere senza attrito su
una retta e soggetto ad una forza elastica. L'equazione del moto μe
mÄ
x = ¡kx, m; k > 0. Dimostriamo, attraverso la formula (1.34)
che il periodo del moto μe indipendente da E. Sia
1
V (x) = kx2 + c
2
l'energia potenziale della forza attiva. L'equazione per determinare i punti critici V 0(x) = 0 ha soluzione x¹ = 0. Scegliendo
la costante c tale che V (¹
x) = 0 (cio¶e c = 0) abbiamo il seguente
diagramma delle fasi (Figura 1.8):
- per E = V (¹
x) = 0 abbiamo un minimo e quindi l'unica traiettoria μe la traiettoria stazionaria f(0; 0)g;
- per E < 0 tutti i valori di x sono non ammessi al moto poich¶e
si avrebbe E ¡ V (x) < 0 per ogni x 2 R;
- per E > 0 il moto della particella avviene nella regione (classicamente permessa) x¡ (E) · x · x+ (E) dove x§ (E) sono
soluzioni della equazione E = V (x§ ):
q
x§ = § 2E=k:
Le traiettorie (s(t); s(t))
_
nello spazio delle fasi sono ellissi per
ogni valore positivo dell'energia; infatti l'equazione per le curve di
livello μe esattamente
1
1
E = ms_ 2 + ks2 ;
2
2
cio¶e l'equazione di un q
ellisse conqassi coincidenti con gli assi coordinati e di lunghezza 2E=k e 2E=m rispettivamente. Quindi
per ogni E > 0 abbiamo un moto periodico di periodo
s
p
Z x+ (E)
dx
2m Z + 2E=k
dx
q
q
T (E) = 2
=
p
2
E ¡ 2E=k
x¡ (E)
[E ¡ V (x)]
1 ¡ kx2 =2E
r
m
r
r
m Z +1
dx
m
m
+1
p
=2
=
2
[
arcsin
x]
=
2¼
:
¡1
k ¡1
k
k
1 ¡ x2
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.3 Analisi qualitativa del moto
27
Fig. 1.8. Comportamento delle curve di livello dell'oscillatore armonico.
1.3.4 Esercizi
1) Studiare qualitativamente il moto uni-dimensionale di equazione
mÄ
x = ¡kx3, m; k > 0, e dimostrare che il periodo T (E) del
moto μe tale che
lim
E!min V (x)+0
T (E) = +1:
2) Studiare qualitativamente il moto uni-dimensionale di equazione
mÄ
x = ¡®x ¡ ¯x2, per (in grandezze adimensionali) m = 1,
® = 2 e ¯ = 3g, g > 0. Piμ
u precisamente, disegnare il diagramma delle fasi e, per i diversi possibili livelli di energia,
discutere quali sono i moti possibili.
3) Calcolare il periodo del moto di un punto soggetto alla forza
peso e vincolato a scorrere, senza attrito, su un arco di cicloide.
Dimostrare il perfetto isocronismo.
4) Discutere il problema dei due corpi introducendo il potenziale
e±cace e impostando la discussione del moto alla Weierstrass.
5) Sia dato un corpo puntiforme P di massa m vincolato a scorrere senza attrito lungo una circonferenza di centro O e raggio
` posta in un piano verticale che ruota attorno all'asse verticale
(O; z) con velocitμa angolare ! = μ_k^ con μ = μ(t) nota. Sia
(O1 ; x1 ; y1; z1 ) il sistema di riferimento relativo con O ´ O1 ,
l'asse (O1 ; z1 ) coincidente con l'asse di rotazione e con il piano
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
28
1 Dinamica del punto
(O1 ; x1 ; z1) contenente la circonferenza; il sistema μe ad un grado
di libertμa ed assumiamo come parametro lagrangiano l'angolo
formato dal segmento P ¡ O ed il semi-asse verticale discendente. Si domanda:
i) calcolare il potenziale e l'energia cinetica rispetto all'osservatore relativo;
ii) calcolare le con¯gurazioni di equilibrio relativo e studiarne
la stabilitμa;
iii)disegnare il diagramma delle biforcazioni per le con¯gurazioni di equilibrio relativo in funzione del parametro positivo adimensionale ° = !g2 ` ;
iv)assegnando, ad esempio, ° = 2:3 disegnare il diagramma
delle fasi e per i diversi possibili livelli di energia, discutere
quali sono i moti possibili.
1.4 Pendolo semplice
1.4.1 Equazione di®erenziale del moto
Trascurando il peso dell'asta possiamo assimilare il pendolo semplice ad un punto pesante vincolato a restare su una circonferenza
(Figura 1.9) non orizzontale. Sia ® l'angolo formato tra il piano
contenente la circonferenza ed il piano orizzontale e si ¯ssi sul piano inclinato un sistema di riferimento (O; x; y) dove O coincide
con il centro della circonferenza, l'asse x μe diretto normale alla
verticale e l'asse y ha la direzione della massima pendenza.
Il sistema μe a un grado di libertμa e possiamo assumere come
parametro lagrangiano l'angolo μ che l'asta forma con il semiasse
delle y negative, orientato verso il basso. L'equazione del moto
diventa, essendo s = `μ e Ft = ¡mg sin ® sin μ,
g sin ®
μÄ = ¡
sin μ
`
(1.35)
dove ` μe la lunghezza dell'asta. Questa μe una equazione di®erenziale del II ordine (non lineare) e non μe possibile ottenere in modo
semplice una sua soluzione. Si puμo procedere studiando il moto
delle piccole oscillazioni linearizzando l'equazione (1.35) oppure e®ettuando l'analisi del moto alla Weierstrass.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.4 Pendolo semplice
29
Fig. 1.9. Il pendolo semplice.
1.4.2 Piccole oscillazioni del pendolo semplice
Considerando il moto del pendolo semplice in un intorno della con¯gurazione μ = 0 possiamo, in prima approssimazione, assumere
sin μ ¼ μ. Con questa approssimazione (linearizzazione attorno ad
una con¯gurazione di equilibrio stabile) l'equazione (1.35) prende
la forma lineare
g sin ®
μÄ = ¡
μ
`
(1.36)
che
q ammette soluzione geneale μ(t) = A cos(!t + ') dove ! =
g sin ®
e dove A e ' dpendono dalle condizioni iniziali. Nel limte di
`
piccole oscillazioni si ottiene quindi un moto periodico con periodo
T = 2¼=! indipendente dall'ampiezza delle oscillazioni (isocronismo approssimato del pendolo semplice).
1.4.3 Analisi del moto alla Weierstrass per il pendolo semplice
L'integrale delle forze vive assume la forma T + V = E dove T =
1
m`2 μ_2 e V (μ) = ¡mg` sin ® cos μ + c, scegliamo c = mg` sin ® in
2
modo che sia V (0) = 0. Da ciμo segue che:
1 2 _2
m` μ ¡ mg` sin ®(cos μ ¡ 1) = E
2
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
30
1 Dinamica del punto
ovvero
2g sin ®
(cos μ + e);
μ_2 =
`
(1.37)
dove la costante e = E=(mg` sin ®) ¡ 1 viene determinata in base
alle condizioni iniziali. In base ai valori di e abbiamo i diversi moti
possibili (Figura 1.10).
Fig. 1.10. Diagramma delle fasi per il pendolo semplice.
Moti rotatori o rivolutivi
Per E > 2mg` sin ®, ovvero e > 1, sarμa sempre μ_ 6= 0. Quindi
il punto passa in¯nite volte per ciascun punto della circonferenza
con velocitμa angolare mai nulla. Si tratta di un moto rivolutivo.
Essendo la posizione del pendolo de¯nita da μ modulo 2¼, risulta
perμo essere un moto periodico.
Stati di equilibrio
Per E = 2mg` sin ® (rispettivamente E = 0), ovvero e = 1 (risp.
e = ¡1) il secondo membro della (1.37) ammette l'unica radice
doppia μ = 0 (per e = ¡1) o μ = ¼ (per e = +1). Quindi il
punto P , abbandonato senza velocitμa iniziale (μ_0 = 0) sia nella
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.4 Pendolo semplice
31
posizione piμ
u bassa sia nella posizione diametralmente opposta vi
permane inde¯nitamente. Si noti che il valore e = ¡1 μe compatibile soltanto con l'equilibrio (stabile) nella posizione piμ
u bassa.
Invece per e = +1 il moto puμo avvenire a partire dalla posizione
iniziale P0 , sempre nello stesso senso della velocitμa iniziale, verso
il punto corrispondente a μ = ¼, meta asintotica cui il mobile
tende al crescere inde¯nito del tempo.
Moti oscillatori
Passiamo ad esaminare il caso in cui si ha 0 < E < 2mg` sin ®,
ovvero ¡1 < e < 1. L'espressione a destra della (1.37) ammette
le due radici semplici μ+ = arccos(¡e) e μ¡ = ¡μ+ . Perciμo il
pendolo oscilla periodicamente fra le posizioni estreme P0 e P00 di
anomalia, rispettivamente, μ+ e ¡μ+ con periodo dato da
s
T =2
2` Z μ+
dμ
p
:
g sin ® 0
cos μ ¡ cos μ+
Per calcolare il periodo T si sostituisce sin(μ=2) = u sin(μ+ =2) e
ponendo k = sin(μ+ =2) < 1 si avrμa
s
` Z1
du
q
T =4
g sin ® 0
(1 ¡ u2 )(1 ¡ k 2 u2 )
si riduce quindi ad un integrale ellittico di prima specie che
si risolve sviluppando in serie di Taylor il termine (1 ¡ k 2u2 )¡1=2
essendo k 2u2 < 1 su tutto l'intervallo di integrazione. Piμ
u precisamente si osservi che
(1 ¡ k 2 u2 )¡1=2 =
1
X
cn (ku)2n
n=0
dove
c0 = 1; cn =
1 ¢ 3 ¢ 5 ¢ ¢ ¢ (2n ¡ 1)
:
2 ¢ 4 ¢ 6 ¢ ¢ ¢ 2n
(1.38)
Sostituendo questa espressione all'interno dell'integrale e integrando per serie si ottiene:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
32
1 Dinamica del punto
T =4
s
Z 1
1
` X
u2n du
q
cn k 2n
g sin ® n=0
0
(1 ¡ u2 )
s
s
1
1
` X
` X
μ0
= 2¼
c2n k 2n = 2¼
c2n sin2n
g sin ® n=0
g sin ® n=0
2
essendo
Z
0
1
u2n du
¼
= cn :
2
(1 ¡ u2 )
q
(1.39)
Se l'anomalia μ+ μe piuttosto piccola allora possiamo ottenere
con buona approssimazione
s
Ã
!
1
`
μ+
4
+ O(μ+
1 + sin2
) :
T = 2¼
g sin ®
4
2
Cio¶e il termine principale dello sviluppo asintotico μe dato dal periodo dell'oscillatore armonico ottenuto linearizzando la (1.35) attorno alla con¯gurazione di equilibrio stabile μ = 0. Da questo
risultato appare chiaro che, in generale, il periodo del pendolo semplice dipende dall'ampiezza delle oscillazioni; solamente nel limite di piccole oscillazioni possiamo sostenere la legge (approssimata) dell'isocronismo del pendolo semplice: il periodo di
oscillazione μe indipendente dall'ampiezza di oscillazione.
1.4.4 Esercizi
1) Dimostrare le formule (1.38) e (1.39).
1.5 Moto di un punto soggetto ad una forza centrale
1.5.1 Integrali primi del moto
Designamo con integrale primo ogni equazione della forma
g(x; y; z; x;
_ y;
_ z;
_ t) = costante arbitraria
(1.40)
la quale sia conseguenza necessaria della (1.1), cio¶e risulti identicamente veri¯cata (per un opportuno valore della costante) da
ogni terna di funzioni x(t); y(t); z(t) soddisfacenti alle (1.1).
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.5 Moto di un punto soggetto ad una forza centrale
33
Esempi di integrali primi.
a) Consideriamo il caso di una forza, applicata ad un punto materiale P libero, costantemente perpendicolare ad una retta
¯ssa. Assumendo l'asse z quale retta si ha Fz = 0, da ciμo
mÄ
z = 0 e quindi mz_ = c1 detto integrale della quantitμ
a di
moto rispetto all'asse z.
b) Consideriamo il caso di una forza, applicata ad un punto materiale P libero, costantemente incidente ad una retta ¯ssa.
Quindi il vettore F, pensato applicato nel punto, ha momento
nullo rispetto alla retta ¯ssa. In particolare, assumendo z quale
^ si avrμa
retta (avente direzione individuata dal versore k),
ma £ (O ¡ P ) ¢ k^ = m(xÄ
y ¡ y xÄ) = 0;
(1.41)
da cui
m(xy_ ¡ y x)
_ = cost:
Questo integrale primo prende il nome di integrale delle aree
o del momento della quantitμ
a di moto. In particolare se la
forza F μe centrale di centro O (una forza centrale μe una forza
sempre diretta verso un punto ¯sso detto centro), sarμa
v £ (O ¡ P ) = c = cost:
(1.42)
c) Consideriamo il caso in cui la forza F applicata al punto libero
P μe conservativa; allora le equazioni (1.1) ammettono l'integrale (primo) delle forze vive
T ¡ U = E;
dove E μe l'energia totale costante.
1.5.2 Forza centrale
Consideriamo il moto di un punto P , libero di muoversi nello
spazio tridimensionale R3 , soggetto unicamente ad una forza centrale (P; F). Ricordiamo che una forza (P; F) si dice centrale se
il vettore F della forza μe sempre diretto verso un punto ¯sso,
detto centro della forza, e se inoltre l'intensitμa della forza dipende
solo dalla distanza del punto P dal centro. Quindi, denotando con
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
34
1 Dinamica del punto
O il centro della forza, segue che ogni forza centrale si puμo scrivere
come
F = f (r)
(P ¡ O)
; r = jP ¡ Oj
jP ¡ Oj
(1.43)
dove f : R+ ! R μe una funzione assegnata.
Nel caso di un punto libero P soggetto ad una forza centrale, di
centro O, sussiste l'integrale primo vettoriale (1.42). Quindi il
moto avviene in un certo piano passante per il centro O della forza
e ortogonale al vettore c de¯nito nella (1.42), identi¯cato mediante
le condizioni iniziali v0 e P0 (μe possibile il caso particolare in cui
v0 μe parallelo a P0 ¡ O, in tale caso c = 0 ed il moto avviene su
una retta). Scegliendo il sistema di riferimento con centro in O in
modo opportuno identi¯chiamo tale piano con il piano z = 0 e la
(1.42) si riduce alla
xy_ ¡ y x_ = c e z ´ 0
(1.44)
fornendo una e®ettiva relazione fra le due coordinate incognite di
P e le loro derivate.
Inoltre ogni forza centrale (1.43) μe conservativa Rde¯nendo, a
meno di una costante additiva, il potenziale U (r) = rr0 f (r0 )dr0 e
da ciμo segue l'integrale primo delle forze vive
1 2
mv ¡ U(r) = E:
2
(1.45)
Come vedremo in seguito dalle (1.44) e (1.45) segue l'integrabilitμa per quadrature del problema (ridotto al piano xy).
Nota. Osserviamo che μe stato possibile derivare le (1.44) e
(1.45) dalle leggi di Newton; viceversa, escludendo il caso di traiettorie circolari, dalle (1.44) e (1.45) seguono le equazioni di®erenziali del moto. Infatti dall'integrale primo delle aree derivato si
ottiene che deve essere
xÄ
y ¡ xÄy = 0
mentre dall'integrale primo dell'energia meccanica derivato si ottiene che deve essere
xÄ
_ x + y_ yÄ = u(x; y; x;
_ y)
_
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.5 Moto di un punto soggetto ad una forza centrale
35
per una qualche funzione u. Queste due equazioni si possono risolvere rispetto a xÄ e yÄ (cosμ³ da pervenire alle equazioni newtoniane
del moto), purch¶e non sia identicamente nullo il determinante dei
coe±cienti di xÄ e yÄ nelle due equazioni. Questo determinante μe
dato da
¡xx_ ¡ yy_ = ¡
1 dr2
2 dt
che risulta diverso da zero ad esclusione del caso r = cost: che
corrisponde appunto alle eventuali traiettorie circolari. Da ciμo si
desume che, quando di un punto soggetto ad una forza centrale si
vogliono studiare le eventuali orbite circolari, non basta tener
conto degli integrali primi delle aree e della energia cinetica, ma
bisogna riprendere le originarie equazioni del moto.
Nota. Disponendo della costante additiva possiamo, se U(r)
tende ad un limite ¯nito per r ! 1, assumere tale valore 0. Se
l'energia totale μe negativa, allora dalla (1.45), sarμa U(r) ¸ ¡E > 0
durante il moto; quindi U non si annulla mai ed r deve ammettere
un limite superiore ¯nito. Cio¶e: se il potenziale U(r) di una
forza centrale si mantiene regolare all'in¯nito (annullandosi all'in¯nito) e l'energia totale del mobile μ
e negativa,
l'orbita si svolge tutta a distanza ¯nita.
1.5.3 Integrazione delle equazioni del moto
Passiamo ora alla integrazione del sistema (1.44), (1.45) riferendolo
a coordinate polari r e μ, aventi il polo in O e l'asse polare secondo
l'asse orientato delle x. Queste diventano:
(
r2 μ_ = c
:
1
m(r_ 2 + r2 μ_2 ) = U (r) + E
2
(1.46)
Si distinguono due casi:
a) c = 0;
b) c =
6 0.
Il caso a) corrispondente a c = 0 (costante delle aree nulla) darμa
luogo a due possibilitμa:
a1) r ´ 0 stato di quiete nel punto O;
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
36
1 Dinamica del punto
a2) μ_ ´ 0 moto rettilineo (lungo la retta avente inclinazione
μ0 = μ(0)) e la determinazione di r(t) si ridurrμa allo studio
dell'equazione uni-dimensionale delle forze vive, che assume la
forma
2
r_2 = [U(r) + E] :
m
Nel caso b) corrispondente a c 6= 0 si ha che μ_ mantiene sempre
lo stesso segno, che potremo supporre (senza perdere in generalitμa)
positivo; quindi μ(t) cresce con t. Da ciμo potremo procurarci l'equazione di®erenziale della traiettoria eliminando dalle (1.46)
il tempo e assumendo come variabile indipendente, in luogo di t, l'anomalia μ, il che μ
e lecito, in quanto μ μ
e funzione
monotona (crescente) di t. Integrando poi l'equazione di®erenziale cosμ³ ottenuta, si determina la traiettoria r = r(μ), allora la
legge temporale del moto verrμa in¯ne completamente determinata
risolvendo l'equazione di®erenziale del primo ordine μ_ = cr¡2 dove
r = r(μ).
Per dedurre dalle (1.46) l'equazione di®erenziale che caratterizza l'incognita r = r(μ) dell'orbita si elimina μ_ per mezzo dell'equazione delle aree, dove
dr
_ 2 d(1=r) = ¡c d(1=r) ;
r_ = μ_ = ¡μr
dμ
dμ
dμ
±
ottenendo l'equazione di®erenziale del I ordine
2Ã
mc2 4 d 1r
2
dμ
!2
3
1
+ 2 5 = U (r) + E:
r
(1.47)
Eseguendo il cambiamento di variabile u = r¡1 e ponendo
· μ ¶
¸
1
2
©(u) =
U
+ E ¡ u2 ;
(1.48)
mc2
u
la (1.47) assume la forma
Ã
du
dμ
!2
= ©(u):
(1.49)
Essa μe quindi integrabile con una sola quadratura. Pertanto il
problema del moto di un punto libero, sollecitato da una
forza centrale, μ
e sempre integrabile con due quadrature.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.5 Moto di un punto soggetto ad una forza centrale
37
In particolare, nel caso piμ
u interessante in cui il valore iniziale
u0 = r0¡1 , r0 = r(0), sia compreso (estremi inclusi) fra due radici
semplici u1 < u2 della ©(u), fra le quali ©(u) si mantenga regolare
e positiva, la funzione u(μ), al crescere di μ, andrμa inde¯nitamente
oscillando, in modo periodico, fra i valori estremi u1 ; u2 e ad ogni
passaggio μ si accrescerμa di
£=
Z
u2
u1
q
du
:
(1.50)
©(u)
L'orbita si svolge quindi tutta nella corona circolare, compresa
fra le due circonferenze concentriche in O, di raggi r2 = 1=u2 e
r1 = 1=u1 e tocca, alternativamente, l'una o l'altra. Questi punti
di contatto si dicono apsidi e l'angolo £ che li separa si dice
angolo apsidale. Quando £ μe commensurabile con 2¼, l'orbita μe
chiusa (Figura 1.11 a sinistra), mentre, nel caso opposto, si avvolge
in¯nite volte intorno al centro riempiendo densamente la corona
circolare (Figura 1.11 a destra).
Fig. 1.11. Nel caso in cui l'angolo apsidale μe commensurabile con 2¼ allora l'orbita μe chiusa (gra¯co a sinistra). Nel caso opposto, in cui l'angolo absidale μe non
commensurabile con 2¼, allora l'orbita riempie densamente una regione dello spazio
(gra¯co a destra); cio¶e ogni introno di ogni punto della corona circolare viene, prima
o poi, visitato dalla traiettoria.
Nel caso particolare, in cui il valore iniziale u0 di u sia radice
multipla della ©(u), la u conserva, comunque varii μ, il valore u0 e
si ha il caso semplice di un'orbita circolare di raggio r0 = 1=u0 ,
la quale, in virtμ
u della legge delle aree, risulta percorsa con velocitμa
angolare costante c=r02, e quindi di moto circolare uniforme.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
38
1 Dinamica del punto
1.5.4 Stabilitμ
a delle orbite circolari
Scrivendo che l'accelerazione (radiale) per un moto centrale deve
essere uguale alla analoga corrispondente della forza, cio¶e a f(r),
e applicando la formula del Binet otteniamo l'equazione del II ±
ordine
mc2
¡ 2
r
Ã
d2 1r
1
+
2
dμ
r
!
= f(r):
(1.51)
La (1.51), mediante il cambio di variabili u = 1=r, diventa
μ ¶
d2 u
1
1
= ª (u); dove ª (u) = ¡
f
¡u
2
2
2
dμ
mu c
u
(1.52)
Perch¶e esista un'orbita circolare soddisfacente a questa equazione,
la quale sia un cerchio di raggio r0 , occorre e basta che la (1.52)
sia soddisfatta dalla soluzione costante u0 = r0¡1, cio¶e si abbia
ª (u0 ) = 0. Ammessa l'esistenza di una tal radice u0 di ª (u) allora
questa orbita sarμa stabile se ª 0(u0 ) < 0 e instabile se ª 0 (u0 ) ¸ 0.
Infatti, consideriamo una orbita prossima all'orbita circolare:
u(μ) = u0 + ²(μ);
(1.53)
con ²(μ) funzione incognita che possiamo assumere in¯nitesima.
Essendo
ª (u) = ª (u0 ) + ²ª 0(u0 ) + O(²2) = ²ª 0(u0 ) + O(²2)
allora l'equazione linearizzata a partire dalla (1.52) ha forma
d2 ²
= ²ª 0(u0 )
dμ 2
che ha soluzione del tipo ² = p cos(!μ + q) dove abbiamo posto
! 2 = ¡ª 0 (u0) assumendo ª 0(u0 ) < 0. Osserviamo in¯ne che in
tale caso l'orbita (1.53) ha una angolo absidale dato da
£=
¼
¼
=q
:
!
¡ª 0 (u0 )
(1.54)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.5 Moto di un punto soggetto ad una forza centrale
39
Esempio
Se f (r) = kr ¡º , k < 0, allora le orbite circolari sono stabili se, e
solo se, º < 3. La veri¯ca μe immediata: la funzione ª (u) prende
la forma ª (u) = k 0 uº¡2 ¡ u dove k 0 μe una costante positiva. L'equazione ª (u) = 0 ha almeno una soluzione per º 6= 3, infatti:
a) se º > 3 allora limu!0+ ª (u) = 0¡ e limu!+1 ª (u) = +1;
b) se º < 3 allora limu!0+ ª (u) = 0+ e limu!+1 ª (u) = ¡1.
Abbiamo poi che ª 0 (u) = k 0(º ¡ 2)uº¡3 ¡ 1 e quindi ª 0 (u0) =
º ¡ 3 da cui segue la tesi.
1.5.5 Appendice: composizione di moti periodici
Consideriamo nel piano (O; x; y) la composizione di due moti periodici di periodo T1 e T2 . Possiamo ricondurci, senza perdere
in generalitμa, al caso del moto di un punto P nel piano (O; x; y)
avente leggi di moto:
x(t) = cos(!1 t); y(t) = cos(!2 t)
dove abbiamo posto !j =
2¼
.
Tj
Vale il seguente risultato:
Teorema. Il moto del punto P μe:
i) periodico se, e solo se, T1 e T2 sono commensurabili, cio¶e es; il periodo T
istono m; n 2 N primi tra loro tali che TT12 = m
n
del moto vale
T = nT1 = mT2;
ii) aperiodico se, e solo se, T1 e T2 sono incommensurabili e, in
tal caso, la traiettoria di P ricopre densamente il quadrato Q =
[¡1; +1] £ [¡1; +1]; cio¶e per ogni P0 = (x0; y0 ) 2 Q e per ogni
² > 0 esiste t 2 R+ tale che jP (t) ¡ P0 j · ².
Dimostrazione: Dimostriamo la prima parte dove, inizialmente,
supponiamo P (t) periodico di periodo T . Dovrμa essere
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
40
1 Dinamica del punto
x(t + T ) = cos(!1 t + !1 T ) = cos(!1 t) = x(t)
e
y(t + T ) = cos(!2 t + !2 T ) = cos(!2 t) = y(t)
per ogni t. Pertanto deve essere !1 T = 2n¼ e !2T = 2m¼ per un
qualche n; m 2 N. Vale immeditamente anche il viceversa. Da
ciμo segue la prima proposizione. Per ciμo che riguarda la seconda
proposizione da quanto detto prima segue che il moto μe aperiodico
se, e solo se, T1 e T2 sono incommensurabili. Per dimostrare che
la traiettoria di P riempe densamente il quadrato Q consideriamo
le funzioni
μ(t) = !1 t e Á(t) = !2 t
de¯nite modulo 2¼, ovvero sul toro bidimensionale. Fissato P0 in
Q esso corrisponde a due angoli μ0 e Á0 andiamo ora a determinare
in quale istante t il punto P , individuato dalle due funzioni μ(t) e
Á(t), ha μ(t) coincidente con il valore iniziale μ0. Se in tale istante
anche Á(t) coincide con Á0 allora P (t) coincide con P0. Se invece Á
μe diversa da Á0 ma su±cientemente vicino allora P (t) μe prossimo
a P0. L'equazione
μ(t) = μ0 (mod2¼)
ha in¯nite soluzioni
tn =
μ0
1
+ nT1 = (μ0 + 2n¼):
!1
!1
Consideriamo ora la dinamica discreta sul toro unidimensionale
(che, ricordiamo, μe un insieme compatto) rappresentata dalla successione di punti
·
¸
!2
!2
Án = Á(tn )(mod2¼) =
μ0 + 2n¼
(mod2¼):
!1
!1
Questi punti sono tutti distinti tra loro poich¶e le due frequenze
sono incommensurabili. Poich¶e il toro unidimensionale T 1 μe un
insieme compatto, esisterμa almeno un punto di accumulazione Á¹
per tale successione e quindi possiamo estrarre da Án una sottosuccessione di Cauchy . Quindi, per ogni ² > 0 esistono n1 e n2
(n2 > n1 ) tali che
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.5 Moto di un punto soggetto ad una forza centrale
41
0 < jÁn2 ¡n1 j = jÁn2 ¡ Án1 j = d · ²:
Cio¶e il punto Án2 ¡n1 sul toro uni-dimensionale ha distanza minore
di ² dall'origine del toro (posta in corrispondenza di Á = 0). Abbiamo cio¶e e®ettuato una rotazione sul toroh T 1i di apertura angolare
d < ². Ripetendo questa rotazione n
¹ = Ád0 volte allora il punto
Án¹ (n2 ¡n1 ) disterμa da Á0 a meno di d < ² e da ciμo la tesi.
1.5.6 Esempio di forza centrale attrattiva direttamente
proporzionale alla distanza
In questo caso f (r) = ¡kr dove k > 0 μe una costante positiva
assegnata. L'orbita μe un ellisse avente il centro coincidente con il
centro O di forza (o, caso degenere, il moto avviene su due rette
passanti per l'origine). La veri¯ca μe immediata. Basta risolvere
il sistema di equazioni di®erenziali
xÄ = ¡! 2 x; yÄ = ¡! 2 y; ! 2 =
k
;
m
che ammette soluzione generale
x(t) = A cos(!t + ®) e y(t) = B cos(!t + ¯)
dove A, B, ® e ¯ sono costanti da determinarsi a partire dalle
condizioni iniziali.
In questo caso si osserva anche che l'angolo apsidale vale
£=
Z
u2
u1
=
q
udu
2E 2
u
mc2
¡
k2
mc2
1 Z ½2
d½
q
=
2E
k2
2 ½1
2
¡ u4
½ ¡ mc
2 ¡ ½
mc2
1 Z ½2
d½
q
2 ½1
¡(½ ¡ ½1 )(½ ¡ ½2 )
dove ½1;2 sono le radici del radicando date da
½1;2
2
mc2 4 2E
=
§
2k 2 mc2
s
3
4E 2
4k 2 5
¡
:
m2 c4 mc2
2
Facendo il cambio di variabili z = 1 + 2 ½½¡½
si ottiene
2 ¡½1
1Z 1
d½
1
¼
+1
p
£=
=
[arcsin(z)]
=
:
¡1
2 ¡1 1 ¡ z 2
2
2
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
42
1 Dinamica del punto
Quindi l'angolo apsidale μe commensurabile con 2¼ ed il moto μe periodico. Questo risultato era evidente sapendo che il moto avviene
su ellissi e sull'ellisse si passa dal punto corrispondente al semi-asse
maggiore a quello corrispondente sul semi-asse minore dopo un incremento di ¼=2 dell'anomalia (Figura 1.12).
Fig. 1.12. Nel caso forza centrale attrattiva direttamente proporzionale alla distanza allora l'orbita μe sempre un ellisse (tranne il caso degenere in cui si riduce ad
un segmento rettilineo) e l'angolo absidale vale sempre 12 ¼.
1.5.7 Analisi del moto alla Weierstrass per il problema di Keplero
In questo caso la forza ha intensitμa che dipende inversamente dal
quadrato della distanza del punto P dal centro: f(r) = ¡ rk2 dove
k > 0 μe una opportuna costante positiva.
Potenziale e±cace
La legge di conservazione dell'energia meccanica puμo essere riscritta
come
r_2 =
2
[E ¡ Veff (r)]
m
dove Veff (r) =
mc2 mk
¡
2r 2
r
prende il nome di potenziale e±cace. Si veri¯ca immediatamente che il potenziale e±cace μe tale che
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.5 Moto di un punto soggetto ad una forza centrale
lim Vef f (r) = +1;
r!0+
43
lim Veff (r) = 0¡
r!+1
2 2
ed ha minimo in rmin = c2 =k di valore V (rmin ) = ¡ m2ck2 . Dal
gra¯co del potenziale e±cace (Figura 1.13) appare che quando
E < 0 il moto del punto avviene con r(t) che oscilla periodicamente
tra due valori r¡ < r+ ¯niti e non nulli (detti rispettivamente
perelio e afelio) tali che Veff (r§ ) = E.
V(r)
0
E
0
r-
r+
r
Fig. 1.13. Gra¯co del potenziale e±cace Vef f . Nel caso in cui l'energia E μe negativa
allora il moto avviene all'interno della corona circolare di raggio r§ .
Orbite circolari
Il caso in cui una orbita μe circolare (r = cost:) si esaurisce con
considerazioni dirette ed elementari. In tal caso la legge delle aree
implica la costanza della velocitμ
a orbitale (μ_ = costante),
cosicch¶
e si tratta di un moto uniforme. In particolare si
hanno orbite circolari per E corrispondente al minimo del poten2 2
ziale e±cace: E = V (rmin ) = ¡ m2ck2 .
Orbite degeneri
Consideriamo come caso particolare quello in cui si annulla la
costante c delle aree: c = 0. Escluso il caso r ´ 0 si ha μ_ = 0
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
44
1 Dinamica del punto
e quindi il moto ha luogo lungo una retta passante per il centro
di forza S. La legge temporale, secondo cui varia r su tale retta μe
de¯nita dall'integrale delle forze vive, che qui si riduce a:
1 2 mk
mr_ =
+ E:
2
r
(1.55)
Distinguiamo due casi:
a) E < 0, il moto si svolge tutto a distanza ¯nita r · ¡k=Em
cadendo, con al piμ
u una inversione del moto, nel centro di forza
S.
b) E ¸ 0, in questa ipotesi il secondo membro della (1.55), per
r > 0, non si annulla mai e si mantiene sempre positivo, quindi
il moto non puμo presentare inversioni di senso. Se la velocitμa iniziale μe diretta verso il centro (r_0 < 0) il mobile, dopo un tempo
¯nito, andrμa a cadere nel centro di forza con la sua velocitμa intensiva cresce oltre ogni limite (come nel caso a)). Se invece
r_0 > 0 il mobile, sulla sua traiettoria rettilinea, si allontana
inde¯nitamente dal centro.
Orbite generali
Supponiamo ora c 6= 0 e ricaviamo dalla seconda delle (??) (integrale delle aree) che la μ μe funzione monotona, e quindi univocamente invertibile, del tempo, e quindi si puμo assumere come
variabile indipendente. Si perviene cosμ³ all'equazione di®erenziale
Ã
d 1r
dμ
!2
=
2E
2k 1
1
+ 2 ¡ 2;
2
mc
c r r
(1.56)
che caratterizza l'equazione polare r = r(μ) dell'equazione generale
del moto essendo
r_ =
dr _ dr c
d1=r
μ=
= ¡c
:
2
dμ
dμ r
dμ
Qui μe particolarmente comodo porre u = 1r ¡ ck2 (anzich¶e r = 1=u
come nella teoria generale), con che la (1.56) assume la forma
Ã
du
dμ
!2
=
2E
k2
+
¡ u2 ;
mc2
c4
(1.57)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.5 Moto di un punto soggetto ad una forza centrale
45
2
2E
k
ma la costante mc
e somma di due
2 + c 4 , per la (1.57) stessa, μ
quadrati e quindi risulta necessariamente positiva, salvo quando
si annulla identicamente la u, il che si ha solamente nel caso di
orbite circolari (caso giμa discusso).
2E
k2
Ponendo q2 = mc
2 + c4 , con q > 0, si ottiene l'equazione differenziale dell'orbita sotto la forma de¯nitiva
Ã
du
dμ
!2
= q 2 ¡ u2 :
Il suo integrale generale, come si veri¯ca immediatamente per separazione di variabili, μe dato da u = q cos(μ ¡ μ0 ) dove μ0 μe la
costante di integrazione; quindi, sostituendo a u la sua espressione
otteniamo per l'orbita l'equazione polare
k
1
= 2 + q cos(μ ¡ μ0 ) ossia r =
r
c
1+
c2
k
c2 q
k
cos(μ ¡ μ0)
:(1.58)
Si osservi che ora μe possibile determinare con una quadratura la
legge oraria μ(t) soluzione della equazione di ®erenziale del primo
ordine
c
c
μ_ = 2 = 2 (1 + e cos μ)2:
r
p
L'equazione (1.58) μe l'equazione polare di una conica
avente un fuoco nel centro di forza, l'asse inclinato di μ0
2
sull'asse polare, il parametro p = ck e l'eccentricitμa
c2 q
e=
=
k
s
1+
2Ec2
:
mk 2
(1.59)
Pertanto: nel moto di un punto soggetto ad una forza centrale, inversamente proporzionale al quadrato della distanza, (esclusi i casi di moto rettilineo caratterizzati dall'annullarsi della costante delle aree), l'orbita μ
e sempre una conica;
e fra le costanti meccaniche di integrazione E e c (energia
totale e doppio della velocitμa areolare) e gli elementi geometrici
caratteristici dell'orbita e e p (eccentricitμa e parametro) intercedono le relazioni sopra descritte. Per dimostrare che μe una
conica passiamo dalle coordinate polari a quelle cartesiane. Dalla
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
46
1 Dinamica del punto
relazione (possiamo assumere μ0 = 0 con una opportuna scelta
degli assi coordinati)
(
p
x = r cos μ
; r=
y = r sin μ
1 + e cos μ
si ottiene
cos μ =
y
x
; sin μ =
p ¡ ex
p ¡ ex
e quindi, usando la relazione cos2 μ + sin2 μ = 1, si ottiene
y2 + (1 ¡ e2 )x2 + 2pex = p2
che risulta essere l'equazione di una conica dipendente dal parametro
e. Se ci restringiamo al caso e < 1 allora μe un ellisse che puμo essere
scritto nella forma
μ
¶2
pe
p2
2
2
y + (1 ¡ e ) x +
=
1 ¡ e2
1 ¡ e2
ovvero
con
pe
(x ¡ x0 )2 y2
+ 2 = 1; x0 = ¡
2
a
b
1 ¡ e2
a2 =
(1.60)
p2
p2
2
;
b
=
(1 ¡ e2 )2
(1 ¡ e2 )
La (1.59) mette in luce il risultato fondamentale che la specie
della conica descritta dal mobile dipende esclusivamente dal segno
della energia totale E. In particolare, essendo c 6= 0, risulta, per la
(1.59), e < 1 o e = 1 o e > 1 secondo che E < 0 o E = 0 o E > 0.
In altre parole l'orbita μ
e ellittica, parabolica o iperbolica
secondo che l'energia totale μ
e negativa, nulla o positiva.
Si noti che questo criterio risulta applicabile anche nel caso c = 0
inteso come criterio limite c ! 0.
Noi siamo arrivati alla determinazione della traiettoria (1.58) risolvendo una equazione di®erenziale del primo ordine data dall'integrale primo dell'energia (facendo anche uso dell'integrale primo
delle aree); μe possibile determinare la traiettoria risolvendo una
equazione di®erenziale del secondo ordine che deriva dalla equazione
di Newton dove facciamo uso delle formule di Binet.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.5 Moto di un punto soggetto ad una forza centrale
47
Caso Kepleriano
Fissiamoci sul moto ellittico proprio, caratterizzato da E < 0 e
μ facile riconoscere che, in questo caso, il moto
c 6= 0 per cui e < 1. E
del punto attratto dal centro P0 μe un moto Kepleriano, cio¶e un
moto soddisfacente alle prime due leggi di Keplero. Infatti: il moto
μe centrale rispetto ad 0, essendo tale la forza; l'orbita μe un ellisse
avente un fuoco in 0; ed in¯ne sussiste la legge delle aree. Che la
conica sia un ellisse segue dalle (1.60) che danno 0 < b < a. Per
veri¯care che P0 sia in uno dei fuochi ricordiamo che per
p un ellisse
di equazione (1.60) allora i fuochi
sono
posti
in
(x
§
a2 ¡ b2 ; 0)
0
p
pe
pe
2
2
e nel nostro caso si ha x0 + a ¡ b = ¡ 1¡e2 + 1¡e2 = 0 e quindi
0 coincide con uno dei due fuochi.
In¯ne,q si tratta di un moto periodico di periodo T , dove
3
T = 2¼ ak : Infatti, il periodo, per la legge di conservazione
del momento angolare di modulo K = mc (ovvero per la costanza
della velocitμa areolare), si ha che 2mA = T K dove A = ¼ab μe
l'area dell'ellisse e dove μe noto che
r
p
p
p
a
e b= p
= pa = c
a=
2
2
1¡e
k
1¡e
e quindi
2m¼ab
2m¼ca3=2
a3=2
T =
=
= 2¼ 1=2 :
K
k 1=2 K
k
1.5.8 Orbite chiuse e condizione sul potenziale
Da quanto mostrato segue che anche nel caso di potenziale Newtoniano tutte le orbite (limitate) sono chiuse. Questa proprietμa
osservata per il potenziale elastico e per il potenziale Newtoniano
non μe veri¯ca da altri tipi di forze centrali. Piμ
u precisamente μe
possibile dimostrare che:
Teorema. In un campo centrale tutte le orbite limitate sono
chiuse se, e solo se, l'energia potenziale V (r) ha una delle seguenti
forme
V (r) = kr 2 o V (r) = ¡
k
r
con k costante positiva.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
48
1 Dinamica del punto
1.6 Moto di un punto su una super¯cie prestabilita
1.6.1 Considerazioni preliminari.
Consideriamo il moto di un punto materiale P che, sotto la sollecitazione di forze attive di risultante F, sia costretto a muoversi
su di una super¯cie ¾ priva di attrito avente equazione
f (x; y; z; t) = 0:
(1.61)
L'equazione del moto μe data da
ma = F + ©
(1.62)
dove © μe la reazione vincolare esercitata dalla super¯cie al punto.
Si osserva che se la super¯cie μ
e ¯ssa e priva di attrito
allora vale il teorema delle forze vive: dT = dL dove dL μe il lavoro
in¯nitesimo compiuto dalle sole forze attive (in caso di attrito si
dovrebbe tenere conto anche del lavoro in¯nitesimo compiuto dalle
reazioni vincolari). Inoltre, se la forza sollecitante μe conservativa
ed U μe il suo potenziale, segue che dT = dU e, per integrazione:
1 2
mv ¡ U = E;
2
cio¶e l'energia totale del mobile rimane costante durante il
moto, ovvero essa μe un integrale primo del moto. In particolare,
denotando con v0 e U0 i valori delle velocitμa e del potenziale in
una generica posizione P0, l'equazione precedente dμa:
´
1 ³ 2
m v ¡ v02 = U ¡ U0:
2
(1.63)
Nota. Dalla (1.63) segue che se si fanno partire due punti materiali dotati di egual massa da una stessa posizione P0 con la
medesima velocitμa e sotto l'azione di una stessa forza conservativa, anche se uno si suppone libero e l'altro vincolato ad una
super¯cie priva di attrito, essi giungono in punti, nei quali il
potenziale ha lo stesso valore, con la medesima velocitμ
a.
Nella ipotesi che ¾ sia priva di attrito (sia poi ¾ indipendente
^ incognita, sarμa ortogo no dal tempo) allora la reazione © = ©N,
onale alla super¯cie, pertanto avrμa componenti
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.6 Moto di un punto su una super¯cie prestabilita
©=¸
49
@f
@f
@f ^
©
^³ + ¸ ^´ + ¸ k;
¸=
2R
@x
@y
@z
jgrad fj
dove ¸ designa un fattore di proporzionalitμa a priori incognito.
Proiettando la (1.62) sugli assi si ottengono le tre equazioni
8
x = Fx + ¸ @f
>
< mÄ
@x
>
:
mÄ
y = Fy + ¸ @f
@y
mÄ
z = Fz + ¸ @f
@z
F = Fx^³ + Fy^´ + Fz k^
(1.64)
che insieme alla (1.61) formano un sistema di quattro equazioni
nelle quattro incognite x; y; z (fondamentali) e ¸ (ausiliaria).
Moto spontaneo e geodetiche
Se si suppone che le forze attive siano nulle, cio¶e il moto di P
avviene su ¾ per e®etto della velocitμa iniziale v0 , ed in assenza
di attrito allora la traiettoria del punto μ
e una geodetica,
descritta con velocitμ
a costante. Infatti dalla (1.63) segue che
v μe costante e quindi sÄ = 0; da ciμo segue che l'accelerazione ha solo
componente normale: ak^
n. D'altra parte la (1.62) impone che sia
^
^ (o n
^ che μe
akN, essendo F = 0, e quindi deve essere n
^=N
^ = ¡N)
la proprietμa caratteristica delle geodetiche sulle super¯ci immerse
in R3 .
1.6.2 Moto di un punto pesante sopra una super¯cie di rotazione
ad asse verticale e priva di attrito.
Sia data una super¯cie di rotazione ad asse verticale de¯nita, in
coordinate polari, attraverso la funzione ½ = f (z), con f(z) ¸ 0
assegnata, e sia il punto pesante P mobile su questa super¯cie
senza attrito. Nel caso in cui sul mobile sia applicata la sola
forza peso μe possibile studiare il moto del punto attraverso l'uso
di integrali primi invece che ricorrere alle equazioni (1.64) che introducono una incognita ¸ ausiliaria. Orientando l'asse z verso la
verticale ascendente l'integrale delle forze vive assume la forma
1 2
mv + mgz = E:
2
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
50
1 Dinamica del punto
D'altra parte, la forza peso μe sempre parallela all'asse z, e quindi
sussiste sempre l'integrale delle aree relativo al piano z = 0:
xy_ ¡ yx_ = c:
Questi due integrali primi, espressi in coordinate cilindriche (μ; ½; z),
assumono la forma
8
h
i
< 1 m z_ 2 (1 + f 0 2 ) + f 2 μ_ 2 + mgz = E
2
: f 2 μ_ = c
(1.65)
dove ½ = f(z) de¯nisce la super¯cie di rotazione ed essendo
v2 = (½_2 + ½2μ_2 + z_ 2 ) = (z_ 2 f 02 + f 2 μ_2 + z_ 2):
Se si suppone c = 0, escludendo gli eventuali stati di equilibrio
in punti della super¯cie situati sull'asse (½ = 0), si ha μ = cost: e
quindi si tratta di un moto su una curva piana di equazione
z_ 2 =
2(E=m ¡ gz)
;
1 + f 02
che risulta integrabile per quadrature.
Sia c 6= 0, in particolare possiamo sempre supporre c > 0, e la
legge temporale si deduce con una quadratura dall'integrale delle
aree, non appena si μe determinata la traiettoria, per es. esprimendo
z in funzione di μ (cosa sempre possibile poich¶e μ_ > 0 per ogni t
e quindi la funzione μ(t) μe monotona crescente e, in particolare,
invertibile) dove
z_ =
dz _ dz c
μ=
:
dμ
dμ f 2
Per questa funzione z(μ) si trova la equazione di®erenziale
Ã
dz
dμ
!2
=
f 2 [2(E=m ¡ gz)f 2 ¡ c2 ]
³
c2 1 + f 02
´
(1.66)
integrabile con una quadratura.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.6 Moto di un punto su una super¯cie prestabilita
51
1.6.3 Pendolo sferico.
Il caso particolare in cui f (z) μe de¯nita dalla equazione ½2 = `2 ¡z 2
si denota con pendolo sferico ed μe il caso di un punto pesante
vincolato (o appoggiato) ad una sfera di raggio `. Ponendo f (z) =
p
`2 ¡ z 2 la (1.65) assume la forma
8
h
< 1m
i
`2 z_ 2
+
`2 ¡z 2
2 _
(`2 ¡ z2 )μ_2 + mgz = E
2
:
: (`2 ¡ z )μ = c
(1.67)
Nell'ipotesi c > 0, assumendo come variabile indipendente la
μ in luogo della t, la funzione z(μ), che basta a determinare sulla
sfera la traiettoria del pendolo, μe caratterizzata dall'equazione differenziale ricavata dalla (1.66), integrabile con una quadratura,
2 2
c`
dove 1 + f 02 =
`2
`2 ¡z 2
Ã
dz
dμ
!2
= ©(z)
e dove
©(z) = (`2 ¡ z 2 )2 ©1 (z); ©1 (z) = 2(¡gz + E=m)(`2 ¡ z 2) ¡ c2 :
Per lo studio quantitativo della soluzione z(μ) giocano un ruolo
importante le radici della funzione ©1 (z). Piμ
u propriamente, studiamo l'equazione
Ã
dz
dt
!2
=
Ã
dz
dμ
!2
μ_2 =
c2
1
1
©(z) = 2 ©1(z):
2
2
2
2
2
(` ¡ z ) c `
`
Osservando che ©1(z) μe un polinomio in z di grado 3 tale che
(Figura 1.14)
©1 (§`) = ¡c2 < 0 e
lim ©1(z) = +1
z!+1
allora esiste z3 > +` tale che ©1 (z3) = 0. Le altre due radici z1
e z2 sono comprese in (¡`; +`). Infatti notiamo che deve essere
jz0 j · `; piμ
u precisamente, poich¶e si μe escluso il caso c = 0, sarμa
jz0 j < `, dove z0 μe la quota della posizione iniziale. In particolare
la condizione di realtμa del moto ©(z0) ¸ 0 implica ©1 (z0) ¸ 0.
Discutiamo separatamente i due casi ©1 (z0) > 0 e ©1 (z0 ) = 0.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
52
1 Dinamica del punto
-l
l
z1
z2
z
z3
Fig. 1.14. Gra¯co del polinomio ©1 (z). Le 3 radici sono tali che z3 > +` mentre
¡` < z1 · z2 < +`.
a) ©1 (z0) > 0, in questa ipotesi la funzione z(μ) oscilla periodicamente tra due paralleli di quote z1 e z2 comprese nell'intervallo
(¡`; +`) dove z1 e z2 sono radici semplici di ©1 (z). Si osserva
che il piano equidistante dai due paralleli di quote z1 e z2
μ
e sempre al di sotto dell'equatore (di equazione z = 0).
Infatti la funzione ©1 puμo essere scritta come
©1 (z) = 2gz 3 ¡ 2E`=mz 2 ¡ 2g`2 z ¡ c2 + 2E`2 =m
= 2g(z ¡ z1)(z ¡ z2 )(z ¡ z3 )
da cui segue che deve essere
z1 z2 + z2 z3 + z1 z3 = ¡`2
cio¶e (z1 + z2)z3 = ¡(`2 + z1 z2 ):
Ricordando che z3 > 0 e che jzj j < `, j = 1; 2, segue z1 +z2 < 0,
cio¶e la tesi.
b) ©1 (z0) = 0, in questo caso se la radice μe semplice allora rientriamo nel caso a) ed il punto si trova inizialmente su uno dei due
paralleli che limitano la zona entro cui serpeggia la traiettoria.
Se, in¯ne, z0 non μe radice semplice (e quindi non puμo essere
che doppia) allora μe ben noto che durante il moto si conserva
z = z0 , cio¶e la traiettoria μe il parallelo di quota z0 (situato sotto
l'equatore); in quest'ultimo caso si ha anche μ_ = cost:, cio¶e si
ha un moto rotatorio uniforme. Il fatto che sia z0 < 0 segue
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.6 Moto di un punto su una super¯cie prestabilita
53
dal fatto che ©1 (z) = 2g(z ¡ z3)(z ¡ z0)2 da cui dovrμa essere
(poich¶e z0 ´ z1 = z2 ) 2z0 z3 = ¡(`2 z02 ) < 0 e quindi z0 < 0.
In ultima analisi segue che il moto del punto P avviene, ad
esclusione del moto rotatorio uniforme, tra due quote z1 e z2 e la
funzione z(μ) μe periodica ed impiega un angolo £ per raggiungere
la quota piμ
u bassa partendo dalla quota piμ
u alta (Figura 1.15
£ = c`
Z
z2
z1
q
dz
:
©(z)
Fig. 1.15. Il moto del pendolo sferico avviene, in generale, tra due quote z1 e z2
ruotando sempre nello stesso verso e toccando, in modo periodico, i due paralleli.
Come osservazione ¯nale notiamo che il moto di P sulla super¯cie sferica μe periodico se e solo se £ e ¼ sono commensurabili
tra loro.
Calcolo dei periodi
Escludendo il caso particolare di moto rotatorio uniforme si μe stabilito che il moto del punto sulla super¯cie sferica avviene tra due
quote z1 e z2 e la funzione z(t) μe una funzione periodica. Per
calcolarne il periodo ripartiamo dalla relazione
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
54
1 Dinamica del punto
Ã
dz
dt
!2
1
©1 (z);
`2
= Uc;E (z) dove Uc;E (z) =
questa equivale a studiare un moto su una retta con potenziale Uc;E
2
2
al livello di energia E 0 = 0. Equivalentemente, poich¶e ` ¡z
>
`2
0 8z 2 (¡`; `), si puμo studiare dal punto di vista qualitativo il
2
problema con energia potenziale e±cace 2gz + `2c¡z2 al livello di
energia 2E=m. In ogni caso la funzione z(t) risulta essere una
funzione periodica di periodo
Z
T1 ´ T1(c; E) = 2
z1
Z
=2
dz
z2
z2
z1
r³
q
2E
m
¡ 2gz ¡
dz
c2
`2 ¡z 2
´
`2 ¡z 2
`2
:
Uc;E (z)
Supponendo poi nota z(t) si ottiene
μ(t) =
Z
t
0 `2
c
d¿ + μ0 :
¡ z 2 (¿ )
Osserviamo che la funzione `2 ¡zc 2 (t) μe una funzione periodica di
periodo T1 e quindi ammetterμa uno sviluppo in serie di Fourier;
quindi, portando la serie fuori dall'integrale, otteniamo
μ(t) = μ0 + c0 t + Á(t):
Ponendo !1 = 2¼=T1 allora la funzione
Á(t) =
XZ
n6=0 0
t
cn ei!1 n¿ d¿ =
X cn !1 h
n6=0
n
i
ei!1 nt ¡ 1
μe una funzione periodica di periodo T1 . Inoltre la costante c0 vale
1 Z T1
c
dt
c0 =
2
T1 0 ` ¡ z 2 (t)
s
2 Z z2
c
`2 ¡ z 2
dz
q
=
2
2
2
2
2E
T1 z1 ` ¡ z
`
¡ 2gz ¡ `2c¡z2
m
2 Z z2
c`
q
=
dz:
T1 z1 (`2 ¡ z 2)3=2 2E ¡ 2gz ¡ 2c2 2
m
` ¡z
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.7 Dinamica relativa del punto
55
Quindi μ(t) (de¯nito modulo 2¼) μe dato dalla composizione di due
moti periodici; uno di periodo T1 ed uno di periodo T2 = 2¼=c0 .
Di conseguenza il moto del pendolo ¯sico μe periodico se, e solo se,
T1 e T2 sono commensurabili.
1.7 Dinamica relativa del punto
1.7.1 In°uenza della rotazione terrestre sul moto dei gravi nel
vuoto
Prescindiamo dalla resistenza dell'aria e degli altri corpi celesti (es.
il sole, la luna, etc.) e consideriamo il moto, rispetto alla Terra,
di un punto materiale P di massa m in prossimitμa di essa. Sotto
tali ipotesi la forza (assoluta) totale agente su P si riduce alla
attrazione terrestre che, assumendo m = 1, designeremo con G.
Perciμo rispetto ad un riferimento galileiano l'accelerazione a di P
μe data da
a = G:
(1.68)
Perμo a noi normalmente interessa il moto relativo di P rispetto
alla Terra, cio¶e piμ
u precisamente la sua accelerazione relativa a1:
a1 = G ¡ a¿ ¡ ac :
(1.69)
In ¡ma¿ riconosciamo quella forza F¿ chiamata forza di trascinamento, mentre la ¡mac dicesi forza di Coriolis. Ricordiamo
che mG ¡ ma¿ = mG + F¿ non μe altro che il peso del grave P ,
cio¶e la forza mg che si puμo de¯nire come direttamente opposta
a quella che occorrerebbe applicare al grave (in quiete) per impedirne la caduta.
Per intervalli di tempo piccoli, rispetto ad un anno, possiamo
ridurre F¿ alla forza centrifuga dovuta al moto diurno, la cui velocitμa angolare ! μe costante e diretta secondo l'asse polare della
Terra, da Sud a Nord. La forza peso mg = mG + F¿ , come ben
sappiamo, μe e®ettivamente variabile, di intensitμa e di direzione, da
luogo a luogo ma, entro un raggio di pochi chilometri, μe lecito ritenerla costante sia in grandezza che in direzione. Piμ
u in dettaglio,
consideriamo l'e®etto della rotazione della Terra sugli esperimenti
in un laboratorio. Dato che la terra ruota praticamente uniforme2¼
mente, si puμo supporre che !_ = 0 dove ! = 24¢3600
. Il rapporto
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
56
1 Dinamica del punto
tra la forza centrifuga e la forza peso assume il massimo valore
all'equatore, dove vale
(7:3 ¢ 10¡5)2 ¢ 6:4 ¢ 106
3
F¿ (P ) ! 2 R
=
=
¼
g
g
9:8
1000
dove R μe la distanza del punto dal centro della terra (cio¶e R coincide con il raggio della terra). Questo rapporto varia di poco nei
limiti di un usuale laboratorio. Piμ
u precisamente si ha che
F¿ (P + ¢P )
F¿ (P )
=
(1 + O(¢P=R)) :
g
g
Quindi μe lecito, in prima approssimazione, ritenere la forza centrifuga costante e la forza peso avente intensitμa costantemente
uguale a mg. Concludiamo quindi che all'equazione vettoriale
(1.69) del moto di P rispetto alla Terra si puμo dare la forma de¯nitiva
a1 = g ¡ 2! £ v1:
(1.70)
Moto dei gravi e deviazione verso oriente
Supponiamo che il moto avvenga nell'emisfero boreale e adottiamo
come riferimento terrestre la terna destra che si ottiene assumendo:
a) L'origine in un punto O solidale con la Terra, in prossimitμa del
luogo dove avviene il moto;
b) L'asse z sulla linea di azione della forza peso in O (verticale del
luogo) orientata verso l'alto, cio¶e la verticale ascendente;
c) L'asse x nel piano meridiano di O, orientato verso il Nord.
L'asse y risulta cosμ³ univocamente determinato; proiettando l'equazione vettoriale (1.70) su tali assi abbiamo g = (0; 0; g) e, se °
μe l'angolo (acuto) formato da g con il piano equatoriale (latitudine
geodetica), le componenti del vettore ! sono date da
p = ! cos °; q = 0; r = ! sin °;
(1.71)
cosicch¶e dalla (1.70) risulta
8
>
Ä = 2y!
_ sin °
<x
yÄ = 2! (¡x_ sin ° + z_ cos °) :
>
: zÄ = ¡g ¡ 2y!
_ cos °
(1.72)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.7 Dinamica relativa del punto
57
Sono queste, nella schematizzazione appena precisata, le equazioni
di®erenziali del moto di un grave (di massa qualunque) nel vuoto,
ove si tenga conto della rotazione della Terra. Queste equazioni
sono integrabili elementarmente e, restringendoci al caso piμ
u interessante, assumiamo le condizioni iniziali
x0 = y0 = z0 = 0 e x_ 0 = y_0 = z_0 = 0:
Sotto queste condizioni dalla prima e dalla terza delle (1.72) si
deduce che
x_ = 2y! sin °; z_ = ¡gt ¡ 2y! cos °
(1.73)
che sostituite nella seconda delle (1.72) segue che
yÄ + 4! 2 y = ¡2g!t cos °
che μe una equazione di®erenziale lineare completa, a coe±cienti
costanti, del II ± ordine il cui integrale generale vale
g cos °
t + r cos(2!t + μ0 ):
y(t) = ¡
2!
Imponendo le condizioni iniziali si determinano in¯ne r e μ0 ottenendo
μ
¶
g cos °
sin 2!t
y(t) = ¡
t¡
:
2!
2!
Sostituendo questa nelle (1.73) si perviene in¯ne alle
μ
¶
1 2 1 ¡ cos 2!t
t ¡
x(t) = ¡g sin ° cos °
;
2μ
4! 2
¶
1 2 1 ¡ cos 2!t
1 2
2
t ¡
z(t) = ¡ gt + g cos °
:
2
2
4! 2
Prendendo intervalli di tempo tali che !t ¿ 1 e sviluppando in
serie di Taylor le soluzioni trovate e trascurando i termini di ordine
superiore (o uguale) in !t al primo si trova
1
x(t) = O(! 2 t4); y(t) = O(!t3 ); z(t) = ¡ gt2 + O(! 2 t4 );
2
cio¶e si ritrovano le equazioni del moto dei gravi nel vuoto. Se
invece si prendono in considerazione i termini d'ordine superiore
in !t si ha che
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
58
1 Dinamica del punto
x(t) = O(! 2 t4)
i
g cos ° h
1
3
5 5
y(t) = ¡
(2!t)
=6
+
O(!
t
)
= ¡ g!t3 cos ° + O(! 3t5 )
2
4!
3
1 2
2 4
z(t) = gt + O(! t ):
2
Quindi rimane inalterata la legge per la quota del mobile ma il
moto avviene nel piano (O; y; z) secondo la legge
y2 = ¡
8 ! 2 cos2 ° 3
z :
9
g
Si osservi in¯ne che y < 0 per ogni t > 0; si prova quindi la
deviazione di un grave verso Est. Quindi, nell'emisfero settentrionale, la forza di Coriolis spinge verso oriente ogni corpo
che cade sulla Terra; nell'emisfero meridionale la forza di Coriolis
spinge verso la parte opposta.
Esempio
Un sasso viene gettato (senza velocitμa iniziale) dalla cima di una
torre alta 250 mt. alla latitudine 60±. Calcoliamo di quanto si
allontana dalla verticale:
7:3 ¢ 10¡5 q
2! cos ° q
3
2jzj =g =
2 ¢ 0:253 =9:8 ¼ 0:04345 metri:
y=
3
3
Invece, quanto si allontana dalla verticale una secchia viene gettata (senza velocitμa iniziale) dalla cima della torre Ghirlandina di
Modena.
1.7.2 Pendolo di Focault
Discutiamo ora il pendolo sferico considerando il contributo della
rotazione della terra. In particolare, il punto P , di massa m, si
muove come se fosse libero e sollecitato simultaneamente dalla
forza peso e dalla reazione vincolare ©; quindi, a partire da
quanto stabilito in merito al pendolo sferico nel paragrafo 1.6.3
la equazione di®erenziale del moto assume la forma vettoriale:
ma1 = © + mg ¡ 2m! £ v1
(1.74)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.7 Dinamica relativa del punto
59
dove riguardiamo il vettore g come costante in grandezza e direzione e dove assumiamo costante il contributo della accelerazione di trascinamento (questa attitudine μe giusti¯cata poich¶e, assumendo solamente il contributo della rotazione terrestre e assunto
questo uniforme, allora la variazione della forza di trascinamento
all'interno di un laboratorio μe trascurabile). Proiettando sugli assi
aventi origine nel centro M della sfera (assi scelti come nel caso
(1.72) orientando l'asse z diretto come la verticale ascendente) e
introducendo per le componenti della reazione il moltiplicatore di
Lagrange ¸ otteniamo le tre equazioni scalari:
8
>
x = ¸x + 2my!
_ sin °
< mÄ
mÄ
y = ¸y + 2m!(¡x_ sin ° + z_ cos °)
>
: mÄ
z = ¸z ¡ mg ¡ 2my!
_ cos °
(1.75)
dove il punto μe obbligato a muoversi sulla sfera di raggio ` e centro
M = (0; 0; 0) e ° μe la latitudine geodetica del luogo. Assumendo
piccole oscillazioni, quindi z ¼ ¡` e z_ ¼ zÄ ¼ 0 e 2y!
_ cos ° trascurabile di fronte a g poich¶e ! ¿ 1, si ha dalla terza delle (1.75)
¡¸` ¡ mg = 0; ¸ = ¡mg=`
dando alle prime due la forma
(
xÄ = ¡gx=` + 2y!
_ sin °
:
yÄ = ¡gy=` ¡ 2x!
_ sin °
(1.76)
Ponendo !1 = ¡! sin ° si conclude che le piccole oscillazioni
del punto P o, meglio, della sua proiezione Q sul piano orizzontale
z = 0, son de¯nite dalle due equazioni lineari
(
xÄ = ¡gx=` ¡ 2y!
_ 1
:
yÄ = ¡gy=` + 2x!
_ 1
(1.77)
Denotando con a = xÄ^³+ yÄ^´ e v = x^
_ ³ + y^
_ ´ l'accelerazione e la velocitμa
^
(orizzontali) di Q e con k il versore verticale ascendente, possiamo
riassumere la (1.77) nell'unica equazione vettoriale:
a = ¡g(Q ¡ M )=` + 2!1 k^ £ v:
(1.78)
Si consideri allora, nel piano z = 0, per l'origine M una coppia di assi ortogonali x1 y1 , congruente agli assi xy e che ruotino
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
60
1 Dinamica del punto
^ L'accelerazione
attorno ad M con velocitμa angolare costante !1 k.
a1, rispetto a x1 y1 della proiezione Q di P μe legata alla accelerazione a, rispetto a xy della proiezione Q di P , secondo il teorema
di composizione delle accelerazioni:
a1 = a + (¡!) £ [¡! £ (Q ¡ M )] + 2(¡!) £ v
μ
¶
g
= a ¡ !12(Q ¡ M) ¡ 2!1 ^k £ v = ¡
+ !12 (Q ¡ M ):
`
Quindi il moto della proiezione Q di P , nel piano x1 y1, μe un moto
armonico in due dimensioni avente integrale generale
μ r
μ r
¶
¶
g
g
x1 (t) = a cos t
+ !12 + ' ¼ a cos t
+'
l
l
e
μ r
μ r
¶
¶
g
g
y1 (t) = b cos t
+ !12 + Á ¼ b cos t
+Á :
l
l
Imponendo le codizioni iniziali x(0)
_
= y(0)
_
= 0 e x(0) = x0
e y(0) = 0, facendo coincidere gli assi x e y con gli assi x1 e y1
all'istante t = 0 si ottiene x_ 1(0) = 0 e y_1(0) = ¡!1 x0 e quindi
μ r ¶
s
μ r ¶
g
l
g
x1(t) = x0 cos t
; y1 (t) = ¡!1 x0
sin t
:
l
g
l
Cio¶e la traiettoria del punto Q sul piano orizzontale z = 0 (caso
del Pendolo
e un ellisse avente i semi-assi a = jx(0)j e
¯
q del
¯ Focault) μ
¯
¯
b = ¯!1 a `=g ¯ ¿ a; si tratta quindi di un'ellisse molto schiacciata
e quindi assimilabile ad un segmento dell'asse x1 . Quindi il moto
del punto μe sensibilmente quello di un moto oscillatorio ordinario
del piano zx1 ; ma questo piano non μe ¯sso bensμ³ animato di una
velocitμa angolare !1 = ! sin ° variabile con la latitudine che, per
quanto piccola, col tempo ¯nisce a rendersi manifesta.
Nota. Possiamo giungere alle stesse conclusiosi risolvendo la
equazione (1.77) nel seguente modo. Se poniamo w = x + iy
allora il sistema (1.77) prende forma
g
wÄ ¡ 2i!1 w_ + w = 0:
`
Per determinare la soluzione generale siano
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.7 Dinamica relativa del punto
q
¸1;2 = i!1 § i !12 + g=` ¼ i!1 § i
r
61
g
l
e la soluzione generale ha forma
w = c1e
¸1 t
+ c2e
¸2 t
¼e
i!1 t
μ
c1e
it
p
g=`
+ c2 e
¡it
p
g=`
¶
:
Quindi, per !1 = 0 si ottengono le consuete oscillazioni armoniche
del pendolo sferico e l'e®etto della forza di Coriolis consiste in una
rotazione uniforme di tutto il sistema con una velocitμa angolare
pari a !1 .
1.7.3 Nozioni elementari di meccanica celeste
Le leggi di Keplero
Per i moti dei pianeti intorno al Sole valgono le tre leggi di Keplero
determinate sperimentalmente:
1) Le orbite dei pianeti sono degli ellissi e il Sole ne occupa
uno dei fuochi.
2) Le aree descritte dal raggio vettore, che va dal Sole
ad un pianeta, sono proporzionali ai tempi impiegati a
percorrerli.
3) I quadrati dei tempi impiegati dai vari pianeti a percorrere le loro orbite (durante le rivoluzioni) sono proporzionali ai cubi dei semi-assi maggiori (nel senso che la
costante di proporzionalitμa non dipende dal pianeta).
Problema diretto di Newton
A causa della enorme distanza tra la stella piμ
u vicina e il sistema
solare e a causa della proponderanza della massa solare rispetto
agli altri pianeti si puμo ritenere che l'attrazione sulla Terra sia
sostenzialmente quella che proviene dal Sole. Trascurando le altre
si riguarda la coppia Terra-Sole come isolata nell'Universo. Per
il principio di azione e reazione le accelerazioni del Sole e della
Terra sono inversamente proporzionali alle loro masse; si
puμo pertanto trascurare la piccolissima accelerazione solare dovuta
alla Terra, il che equivale a considerare, in prima approssimazione,
il Sole come ¯sso. Perveniamo pertanto a schematizzare, in prima
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
62
1 Dinamica del punto
approssimazione, il moto della Terra intorno al Sole come quello di
un punto materiale P attratto da un centro ¯sso S con una forza
di intensitμa k mr02m , dove m0 ed m denotano le masse del Sole e
della Terra, r la loro distanza e k ¶e una costante positiva. Il moto
soggetto a questa legge dμa luogo, nel nostro caso (poich¶e il moto si
svolge tutto a distanza ¯nita dal Sole) ad una traiettoria ellittica
avente un fuoco nel Sole. Quindi la legge di Newton implica la
validitμa delle prime due leggi di Newton. Quanto alla terza risulta
4¼2
a3
= km0
T2
(1.79)
da cui si vede che il rapporto a3 =T 2 dipende solamente dalla
costante k e dalla massa del Sole.
Problema dei due corpi
Piμ
u in generale, consideriamo due corpi P0 e P , di masse m0 ; m,
che noi consideriamo isolati nell'Universo; indichiamo con F
il vettore della forza che P0 esercita su P , per il III ± principio
di Newton allora il vettore della forza esercitata da P su P0 sarμa
¡F ed entrambi saranno diretti sulla congiungente. L'equazione
di Newton sui due punti, rispetto ad un osservatore inerziale, sarμa
data da
m0
d 2 P0
d2 P
=
¡F;
m
=F
dt2
dt2
da cui emerge immediatamente che la quantitμa di moto (m0 +m)vG
si conserva e da cui segue che il baricentro dei due punti si muove
di moto rettilineo uniforme. Per determinare poi il moto dei due
punti rispetto al loro baricentro o, equivalentemente, il moto di un
punto rispetto all'altro (ad esempio il moto di P rispetto a P0 ),
introduciamo un osservatore relativo centrato in P0 e traslante;
allora la equazione
³ 2 ´del moto di P rispetto al nuovo osservatore
μe data da m ddtP2
= F ¡ ma¿ (P ). ricordando che il nuovo
P0
osservatore trasla allora a¿ (P ) =
la forma
mm0
m + m0
Ã
d2 P0
dt2
d2 P
dt2
e quindi la equazione prende
!
= F:
(1.80)
P0
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
1.7 Dinamica relativa del punto
63
Questa equazione di®erenziale del moto relativo di uno dei due
corpi rispetto all'altro si identi¯ca, come si vede, con quella che
reggerebbe il moto di P , se P0 fosse ¯sso (o animato di moto
rettilineo uniforme rispetto ad un osservatore assoluto), e, pur attraendo P secondo la legge F, avesse, anzich¶e la massa e®ettiva
mm0
. Questo problema rientra, come caso
m, la massa ridotta m+m
0
particolare di moto centrale, in quello generale discusso nella
Sezione precedente; quindi abbiamo che si tratta di un moto piano, per il quale sussistono simultaneamente l'integrale delle
forze vive e quello delle aree rispetto al centro di forza P0 .
Si dimostra che, nel caso in cui la forza di vettore F coincida
con la forza di attrazione gravitazionale, qualunque sia l'ordine di
grandezza di m rispetto a m0 l'orbita (relativa) di P rispetto a
P0 μe una conica; perciμo nel caso dell'orbita ellittica valgono per il
moto di P rispetto a P0 le prime due leggi di Keplero. Se poi,
in tal caso, si introducono il semi-asse maggiore a dell'orbita e la
durata T della rivoluzione, sussiste la relazione
4¼2
a3
= k(m0 + m);
T2
(1.81)
e per un altro corpo P 0 di massa m0 , che, come P , descriva, sotto la
esclusiva azione di P0 , un'orbita (relativa) ellittica, si ha analogamente, con ovvio signi¯cato dei simboli,
4¼ 2
a0 3
0
2 = k(m0 + m ):
0
T
(1.82)
In conclusione, quando nella trattazione newtoniana del moto dei
corpi celesti, si spinge la schematizzazione ¯no al problema dei
due corpi, si mantengono valide, in generale, soltanto le prime due
leggi di Keplero. La terza puμo sussistere solo in via approssimata.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2
Dinamica dei solidi
2.1 Equazioni di Eulero
Consideriamo un solido avente un suo punto O0 ¯sso. L'ipotesi
su O 0 suggerisce di scegliere in esso il centro di riduzione dei momenti e quindi le equazioni cardinali della dinamica, riferite ad un
osservatore (O; x; y; z), assumono la loro forma piμ
u semplice.
dQ
= Re + ©e ;
dt
(2.1)
dK(O0 )
= −e (O 0 )
dt
(2.2)
dove Re ed −e (O0 ) denotano il risultante e il momento risultante,
rispetto al punto ¯sso O 0, delle forze esterne direttamente applicate e dove ©e denota il risultante della reazione in O 0 , per
tale motivo segue che ªe (O0 ) = 0.
Poich¶e il solido con un punto ¯sso ha tre gradi di libertμa l'equazione vettoriale (2.2) corrisponde a 3 equazioni scalari e quindi
basta da sola a caratterizzare il moto. La (2.1) serve per determinare le reazioni incognite in O0 noto il moto.
L'equazione cardinale dei momenti risulta, talvolta, piμ
u signi¯cativa se riferita ad una terna solidale (O0 ; x0 ; y0 ; z 0 ) avente origine
in O 0 :
Ã
dK(O 0)
dt
!
O0
+ ! £ K(O 0 ) = −e (O 0);
(2.3)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
66
2 Dinamica dei solidi
dove ! designa la velocitμa angolare della ³terna solidale,
cio¶e del
´
dK(O 0 )
la derivata di
corpo stesso, rispetto agli assi (O; x; y; z) e
dt
O0
0
K(O ) rispetto a t e®ettuata rispetto all'osservatore (O0 ; x0; y 0; z 0 ).
La (2.3) diventa particolarmente signi¯cativa quando si assume
come terna (O 0; x0; y 0; z 0 ) quella dei tre assi principali di inerzia del
solido nel suo punto O 0, in questo caso K(O 0 ) ha componenti
Kx0 = Ap; Ky 0 = Bq; Kz 0 = Cr:
(2.4)
Denotando con −x0 ; −y0 e −z 0 le componenti secondo gli assi solidali del momento risultante −e (O 0 ), rispetto ad O 0 , delle forze
attive esterne la (2.3) conduce alle equazioni scalari
8
>
< Ap_ ¡ (B ¡ C)qr = −x0 ;
B q_ ¡ (C ¡ A)rp = − 0 ;
y
>
: C r_ ¡ (A ¡ B)pq = − 0 :
z
(2.5)
Le (2.5) si dicono equazioni di Eulero del moto di un solido
intorno ad un suo punto ¯sso. Si noti che le componenti di −e (O 0)
vanno considerate, nel caso piμ
u generale, come note in funzione,
oltre che del tempo, delle velocitμ
a dei singoli punti del solido e, in
piμ
u, delle loro posizioni nello spazio o, che μe lo stesso data l'ipotesi
di rigiditμa, della orientazione del solido intorno ad O0 . Tramite
la formula fondamentale della cinematica rigida abbiamo che le
velocitμa dei punti dipendono dai parametri di orientazione e dalle
p; q; r; inoltre le p; q; r stesse sono legate a questi parametri
di orientazione da relazioni di tipo di®erenziale. Scegliendo, ad
esempio, come parametri lagrangiani gli angoli di Eulero μ; '; Ã
della terna solidale rispetto alla ¯ssa allora aggiungeremo alle (2.5)
le note equazioni, puramente cinematiche
8
_
_
>
< p = μ cos ' + Ã sin ' sin μ
(2.6)
q = ¡μ_ sin ' + Ã_ cos ' sin μ
>
:
_
r = Ã cos μ + '_
si ottiene un sistema di equazioni di®erenziali del primo ordine
nelle 6 incognite μ; '; Ã; p; q e r.
Moto di un solido libero intorno al baricentro
μ noto che la (2.3) sussiste anche nel caso del moto di un solido
E
libero intorno al baricentro poich¶e ªe (G) = 0 in quanto non
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2.1 Equazioni di Eulero
67
ci sono reazioni vincolari. La (2.3) proiettata sulla terna principale di inerzia (con G = O0 ) dμa ancora luogo alla (2.5) ma con
una di®erenza fondamentale: il momento −e (G), al pari della sollecitazione attiva, va considerato dipendente non solo dagli argomenti μ; '; Ã; p; q e r (e t), tutti inerenti al moto relativo al
baricentro, ma anche dalla posizione e dalla velocitμ
a (assolute) del baricentro stesso. Inoltre la (2.1) assume la forma
dQ
= Re e va ad aggiungersi alle (2.3) per la determinazione del
dt
moto.
2.1.1 Solidi in rapida rotazione e fenomeni giroscopici elementari
Consideriamo un solido con punto O 0 ¯sso e dove l'ellissoide d'inerzia rispetto a questo punto μe rotondo: cio¶e sia tale che A = B,
chiameremo (O 0; z 0 ) asse giroscopico.
Equazioni di Eulero per un solido a struttura giroscopica
La terza delle (2.5), essendo A = B si riduce a
C r_ = −z 0
(2.7)
mentre le altre due, ove si denoti con −1 il componente equatoriale del momento risultante delle forze esterne rispetto ad O0 , si
possono unire nell'unica equazione vettoriale:
0
Ae_ ¡ (C ¡ A)rk^ £ e = −1
(2.8)
dove abbiamo posto e = p^³0 +q^´0. Quindi nel caso in cui −z0 = 0,
ad esempio quando le forze esterne sono equivalenti ad
una unica forza applicata in un punto dell'asse (O 0; z 0 ),
allora si ha che r = r0 = costante.
Fenomeni giroscopici
Si hanno le seguenti proprietμa:
a) Principio della permanenza o tenacia degli assi giroscopici: cio¶e se imprimiamo una rapida rotazione del solido intorno al suo asse giroscopico (O0 ; z 0 ) allora si vede che per e®ettuare uno spostamento (pre¯ssato) dell'asse giroscopico (O 0; z 0 ),
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
68
2 Dinamica dei solidi
in rapida rotazione, l'intensitμa della sollecitazione, applicata all'asse giroscopico, necessaria a tale spostamento μe tanto piμ
u
grande quanto maggiore μe la velocitμa di rotazione dell'asse giroscopico.
b) Principio della tendenza al parallelismo: cio¶e se applichiamo un data forza F in un generico punto A dell'asse giroscopico (O 0; z 0 ) (riuscendo a vincere la tenacia e farlo deviare),
avente momento −(O 0) rispetto al punto ¯sso, allora l'asse
tende a disporsi nella direzione e nel verso di −(O 0) (questa
proprietμa μe veri¯cata non solo nel caso di un solido a struttura
giroscopica ma basta supporre che l'asse intorno a cui avviene
la rapida rotazione coincida con un asse principale d'inerzia del
solido).
Per dimostrare tali proprietμa supponiamo, per ¯ssare le idee,
che sia (O 0 ; z0 ) l'asse giroscopico e che gli assi (O 0 ; x0 ) e (O 0; y 0)
siano principali di inerzia dove A = B. Quindi possiamo scrivere
0
! = e + rk^ dove e = p^³0 + q^´0 e consideriamo uno spostamento che
0
0
0
sposti k^ , cio¶e l'asse giroscopico. Poich¶e K(O) = Ae +Cr ^k ¼ Crk^
per r À 1 segue che
0
0
de
d(r ^k )
d(rk^ )
dK(O 0 )
=A +C
¼C
dt
dt
dt
dt
ricordando che r μ
e costante nel caso in cui la forza sia applicata in un punto dell'asse, allora, facendo uso della seconda
equazione cardinale della dinamica, si ha che
0
dk^
1 dK(O 0 )
1
¼
=
−e (O 0 ):
dt
Cr dt
Cr
Da ciμo appare che quando si vuole e®ettuare uno spostamento pre¯ssato di un corpo ruotante intorno all'asse
giroscopico bisogna applicare all'asse di riduzione sforzi
riducibili ad una coppia tanto piμ
u intensi quanto piμ
u rapida μ
e la rotazione; inoltre si osserva pure che lo spostamento μe
caratterizzato dal momento −e (O 0 ), cio¶e se un corpo ruota intorno ad un asse, una coppia giacente nel piano dell'asse
tende a spostarlo in direzione normale al piano stesso.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2.2 Solido pesante con un punto ¯sso
69
2.2 Solido pesante con un punto ¯sso
2.2.1 Integrali primi
Consideriamo il caso di un corpo solido pesante con punto ¯sso O 0
^ p = ¡mg. Escludiamo il caso G = O0 poich¶e, in
e peso p = pk,
tal caso, si ricadrebbe su di un moto alla Poinsot.
Integrali primi
Supponendo che nella terna ¯ssa (O; x; y; z) l'asse z sia verticale
(di versore ^k) e orientato verso l'alto e che la terna (O 0 ; x0 ; y0 ; z 0)
solidale con il corpo coincida al solito con la terna principale di
inerzia allora per la omogra¯a di inerzia si ha
0
K(O0 ) = Kx0^³0 + Ky 0^´0 + Kz 0 k^ ;
dove
Kx0 = Ap; Ky 0 = Bq; Kz 0 = Cr:
(2.9)
Le forze esterne (e la reazione in O 0) hanno momento nullo
rispetto alla verticale (O 0; z) quindi
Kz = Kz;0 = cost:
in virtμ
u della equazione dei momenti della quantitμa di moto. Essendo °1; °2 e °3 i coseni direttori della terna solidale rispetto alla
0
terna ¯ssa, cio¶e k^ = °1^³0 + °2^´0 + °3k^ , si ha
Kz ´ K(O 0) ¢ k^ ´ Kx0 °1 + Ky0 °2 + Kz 0 °3 = Kz;0 = cost:;
ossia per le (2.9)
Ap°1 + Bq°2 + Cr°3 = Kz;0 :
(2.10)
In secondo luogo poich¶e il peso μe una forza conservativa (e i
vincoli non dipendono dal tempo), vale l'integrale delle forze vive
T ¡ U = E cio¶e, essendo p = ¡mg il peso del corpo (m ne denota
0
; zG0 le coordinate del baricentro
la massa) e x0G ; yG
´
1³ 2
Ap + Bq 2 + Cr2 ¡ pzG = E;
2
(2.11)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
70
2 Dinamica dei solidi
dove
0
0
+ ° 3 zG
:
zG = °1 x0G + °2 yG
μ da notare che dai teoremi generali sul moto dei sistemi non
E
si possono trarre altri integrali primi oltre alla energia meccanica totale ed alla componente verticale del momento
della quantitμ
a di moto (2.10) e (2.11) ¯nch¶e non si introducono
ulteriori ipotesi sulla distribuzione delle masse e in relazione al
punto ¯sso O0 . Poich¶e si tratta di un problema di tre gradi di libertμa, vale a dire in tre incognite essenziali, μe manifesto che questi
due integrali primi non bastano a caratterizzarlo completamente.
2.2.2 Equazioni di®erenziali del moto
Essendo −e (O0 ) = pk^ £ (O0 ¡ G) allora la (2.3) diventa
Ã
dK(O 0)
dt
!
O0
+ ! £ K(O0 ) = pk^ £ (O0 ¡ G):
(2.12)
Inoltre, essendo k^ ¯sso rispetto agli assi (O; x; y; z) si ha
0=
Ã
dk^
dt
!
O
´
Ã
dk^
dt
!
O0
+ ! £ k^
(2.13)
Le equazioni (2.12) e (2.13) proiettate sugli assi principali di inerzia x0; y 0; z 0 danno luogo alle sei equazioni di®erenziali scalari
8
0
0
>
< Ap_ ¡ (B ¡ C)qr = ¡mg(yG °3 ¡ zG °2 )
(2.14)
8
>
< °_ 1 = °2 r ¡ °3 q
(2.15)
Bq_ ¡ (C ¡ A)rp = ¡mg(z 0 ° ¡ x0 ° )
G 1
G 3
>
: C r_ ¡ (A ¡ B)pq = ¡mg(x0 ° ¡ y 0 ° )
G 2
G 1
°_ = ° p ¡ ° r
2
3
1
>
: °_ = ° q ¡ ° p
3
1
2
di cui le prime tre sono, naturalmente, le equazioni di Eulero relative al nostro caso. Complessivamente si ha un sistema di sei
equazioni di®erenziali (2.14), (2.15) del primo ordine fra le sei funzioni incognite del tempo p; q; r; °1 ; °2; °3 che, unitamente alla
condizione °12 +°22 +°32 = 1, dipende da cinque costanti arbitrarie.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2.3 Giroscopio pesante
71
Supponendo risolto il sistema (2.14), (2.15) si trovano gli angoli
di Eulero Ã; μ; ' che risolvono completamente il problema. Infatti
dalle solite equazioni fondamentali
°1 = sin ' sin μ; °2 = cos ' sin μ; °3 = cos μ
(2.16)
si traggono le espressioni di μ e ' in termini ¯niti di °1 ; °2 ; °3 e
quindi del tempo. Dopo di che l'angolo di precessione à si ottiene
con una quadratura dalla equazione (se °1 6= 0)
p = °1Ã_ + μ_ cos ':
(2.17)
La quadratura, che fornisce la Ã, introduce una nuova costante
arbitraria che, insieme con le 5 dell'integrale generale del sistema,
dμa le sei costanti da cui deve dipendere il piμ
u generale moto del
solido pesante con punto ¯sso (sistema olonomo a tre gradi di
libertμa).
2.3 Giroscopio pesante
2.3.1 Terzo integrale primo
Denominiamo giroscopio ogni solido il cui ellissoide baricentrale di inerzia sia rotondo, cio¶
e tale che, ad esempio,
0 0
A = B e che l'asse giroscopico (O ; z ) contenga il baricentro; in tal caso l'ellissoide d'inerzia risulta rotondo anche
rispetto ad ogni altro punto dell'asse.
Consideriamo un giroscopio pesante, ¯ssato in un generico
punto O0 , appartenente all'asse giroscopico e distinto dal baricentro G. Perciμo, rispetto alla solita terna solidale (O 0 ; x0 ; y0 ; z 0), in cui
(O 0 ; z0 ) sia l'asse giroscopico, le ipotesi strutturali caratteristiche
del problema, si traducono nelle condizioni
0
A = B; x0G = yG
= 0;
(2.18)
0
dove abbiamo orientato l'asse giroscopico in modo che sia zG
> 0.
0 0
0
Il punto della semiretta (O ; z ) che dista 1 da O si chiama vertice
del giroscopio e si denota con V .
Il momento delle forze attive si riduce alla forma
0
0 ^
−e (O0 ) = pzG
k £ ^k;
(2.19)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
72
2 Dinamica dei solidi
dove p = ¡mg denota il peso della trottola, da questa segue immediatamente che −z0 = 0. Le equazioni di®erenziali, prese sotto la
forma (2.14) e (2.15), danno l'ulteriore integrale primo Kz 0 ;0
che implica
C r_ = 0 ) r ´ r0 :
(2.20)
Abbiamo dunque, intanto, provato che in ogni moto del giroscopio pesante la velocitμ
a angolare giroscopica si mantiene
costante.
Inoltre i due integrali primi del momento verticale delle quantitμa
di moto (2.10) e dell'energia meccanica (2.11) qui, in base alle
prime due della (2.18), assumono la forma
A (p°1 + q°2 ) + Cr°3 = Kz;0 ;
(2.21)
´
1 ³ 2
1
0
A p + q2 + Cr2 ¡ P zG
°3 = E;
2
2
(2.22)
con r costante. Osserviamo che in questo problema abbiamo i 3 integrali primi del moto Kz , Kz 0 ed E dati dalle
(2.20), (2.21) e (2.22) e ciμ
o rende possibile l'integrazione
per quadrature del problema.
2.4 Rotazioni uniformi del giroscopio pesante
Si noti subito che sotto le ipotesi di simmetria (2.18) qui ammesse
abbiamo il seguente risultato:
Teorema. Il giroscopio pesante μe suscettibile di in¯nite rotazioni uniformi attorno all'asse giroscopico nelle quali
l'asse giroscopico μ
e verticale e la velocitμ
a angolare ! =
0
0
^
^
^
! k , k = k, ha verso ed intensitμ
a completamente arbitraria. Ogni altra retta del giroscopio (non necessariamente coincidente con l'asse giroscopico) passante per O diventa asse di
rotazione permanente soltanto quando sia disposta lungo
la verticale in uno, ben de¯nito, dei due versi possibili, dopo
di che risulta determinato univocamente il valore assoluto della
corrispondente velocitμa angolare (mai inferiore ad un dato valore
critico).
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2.4 Rotazioni uniformi del giroscopio pesante
73
Dimostrazione: Ricordiamo ora che il moto del giroscopio pesante μe caratterizzato dall'equazione dinamica (equazione cardinale dei momenti)
Ã
dK(O0 )
dt
!
O
Ã
!
dK(O 0 )
=
dt
0
= P zG0 k^ £ k^
O0
+ ! £ K(O 0)
(2.23)
e dalla equazione cinematica
Ã
d^k
dt
!
=
Ã
O
dk^
dt
!
O0
+ ! £ k^ = 0;
(2.24)
subordinatamente alle ipotesi strutturali, speci¯che nel nostro
caso,
0
= 0;
A = B; x0G = yG
(2.25)
0
nonch¶e alla condizione convenzionale zG
> 0. Tenendo conto che
sussiste l'integrale r = cost: allora per la velocitμa angolare ! vale
l'espressione vettoriale
A ¡ C ^0
1
K(O0 ) +
rk ;
(2.26)
A
A
con r costante. Le rotazioni uniformi richiedono l'esistenza per
la (2.24) di momenti K(O 0) per cui la espressione (2.26) della !
risulti costante (indi®erentemente riferibile agli assi ¯ssi e solidali). Quindi derivando (rispetto all'osservatore assoluto) rispetto
al tempo la (2.26) e tenendo presente le (2.23) e (2.24) e la formula
^0
0
di Poisson dk = ! £ ^k si ottiene
!=
dt
h
i
0
! = costante , (A ¡ C)r! ¡ P zG0 k^ £ k^ = 0
(2.27)
dalla quale risulta che il vettore
0 ^
(A ¡ C)r! ¡ P zG
k
(2.28)
per ogni eventuale rotazione uniforme del giroscopio pesante, deve
0
risultare parallelo a k^ o nullo. Osserviamo che tale vettore μe
costante rispetto all'osservatore ¯sso, poich¶e per una rotazione uniforme si ha ! costante.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
74
2 Dinamica dei solidi
Consideriamo prima il caso in cui questo vettore costante sia
0
0
parallelo a k^ ; questo implica che k^ deve essere ¯sso rispetto allo
0
0
spazio e quindi ! = rk^ , allora la (2.27) si riduce a k^ £ k^ = 0.
Da ciμo si conclude che: il giroscopio pesante μ
e suscettibile di
in¯nite rotazioni uniformi (o permanenti) attorno all'asse
giroscopico, le quali hanno tutte per asse, nello spazio, la
verticale del punto ¯sso. Se lungo questa verticale si dispone
l'asse giroscopico, indi®erentemente all'ingiμ
u o all'insμ
u, la velocitμa
angolare μe il verso della rotazione restano completamente arbitrari.
Consideriamo ora il caso in cui il vettore (2.28) sia nullo, cio¶e
si abbia
(A ¡ C)r! = P zG0 k^
da cui segue che l'asse di rotazione permanente deve essere disposto verticalmente, cio¶e ! = ! k^ e dove, denotando al solito con
μ l'angolo di nutazione (assunto diverso da 0 e ¼ per non ricadere
nel caso precedente) vale la relazione
r = ! cos μ:
Pertanto si trova che deve valere la condizione
0
(A ¡ C)! 2 cos μ = P zG
e viceversa, tutte le volte che tale relazione μe soddisfatta per due
valori μ e !, allora il corrispondente momento K(O 0 ) sodisfa alla
seconda equazione cardinale della Dinamica. Osserviamo ora che,
pre¯ssata la direzione ed il verso, cio¶e μ, solo un solo valore di ! μe
permesso e viceversa. In ogni caso il valore assoluto della velocitμa
angolare non puμo scendere mai al di sotto di un dato valore critico
v¯
¯
u¯
0 ¯
u¯ P zG
¯
t¯
¯:
¯A ¡ C ¯
Inoltre si osserva anche che nelle rotazioni uniformi del giroscopio pesante (quando l'asse giroscopico non μ
e verticale)
il baricentro si mantiene sempre al di sotto o sempre al
di sopra del piano orizzontale del punto ¯sso, secondo che
l'ellissoide rotondo d'inerzia, rispetto ad O μ
e allungato
A > C o schiacciato A < C.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2.4 Rotazioni uniformi del giroscopio pesante
75
Precessioni regolari del giroscopio pesante
Cerchiamo qui le precessioni regolari del giroscopio pesante, aventi
per asse di precessione la verticale del punto ¯sso e per asse
0
di ¯gura l'asse giroscopico. Poniamo dunque ! = ¹k^ + º ^k
denotando con ¹ e º le componenti costanti di ! secondo l'asse
giroscopico e la verticale ascendente (dette rispettivamente velocitμ
a angolare propria e velocitμ
a angolare di precessione
del corpo). Sostituendo nella (2.26) e risolvendo rispetto al momento K(O 0), si trova
0
^
K(O 0 ) = (A¹ ¡ [A ¡ C]r) ^k + Aº k;
(2.29)
quindi tutto si riduce a cercare se sia possibile soddisfare con una
tale espressione di K(O 0), dove r, ¹ e º siano costanti, all'equazione
dinamica (2.23) del moto del giroscopio pesante. Sostituendo la
(2.29) nella (2.23) e ricordando che
0
0
1
0
0
dk^ A
@
= ! £ k^ = º k^ £ ^k
dt
O
si ottiene
0
0
g ^k £ k^ = 0
f(A¹ ¡ [A ¡ C]r) º + P zG
dove in ogni precessione regolare, che non si riduca ad una semplice
0
rotazione intorno all'asse giroscopico, deve essere k^ £ k^ 6= 0, si
ottiene quindi la seguente equazione scalare
0
(A¹ ¡ [A ¡ C]r) º + P zG
= 0:
(2.30)
Esplicitando, oltre che rispetto ai caratteri intrinseci del giroscopio A, C, p e zG0 , rispetto ai parametri caratteristici della precessione e in particolare rispetto all'angolo costante μ di nutazione
0
si ottiene r = ! ¢ ^k = ¹ + º cos μ e la (2.30) diventa
0
(A ¡ C) º 2 cos μ ¡ C¹º + P zG
= 0:
(2.31)
μ questa la condizione necessaria e su±ciente perch¶
E
e i
parametri ¹; º; μ de¯niscano per il dato giroscopio pesante una precessione regolare. Notiamo che ¯ssando arbitrariamente (entro certi limiti) due dei tre parametri ¹; º; μ si
determina univocamente il terzo.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
76
2 Dinamica dei solidi
In particolare si ottiene che risolvendo l'equazione di II ± grado
(2.31) in º, essendo ¯ssati μ e ¹ con ¹ À 1, si ottengono le due
soluzioni che, trascurando le potenze di ¹¡1 con esponente maggiore di 1, sono date da:
º1 ¼
C¹
P z0
; º2 ¼ ¡ G ¹¡1 :
(A ¡ C) cos μ
C
Abbiamo quindi ottenuto il seguente risultato:
Teorema. Qualunque sia la semiretta per O 0, solidale con il
corpo (e diversa dall'asse giroscopico) che (in un dato istante) si
disponga verticalmente (all'ingiμ
u o all'insμ
u), per ogni valore abbastanza grande della velocitμa propria ¹ intorno all'asse giroscopico,
sono possibili per il giroscopio due diverse precessioni regolari, per
le quali la rotazione precessionale μe rapida nell'una (º dello stesso
ordine di ¹), lenta nell'altra (º dell'ordine di ¹¡1 ).
Osserviamo che le precessioni corrispondono, nell'analisi fatta
in precedenza, alle soluzioni s = s1 = s2 doppie della equazione
f(s) = 0 interne all'intervallo (¡1; +1).
2.4.1 Determinazione dell'angolo di nutazione
Tenendo conto degli integrali (2.21) e (2.22) e delle equazioni generali (2.15) (basta la terza), si ottiene la equazione di®erenziale
del primo ordine
s_ 2 = ©(s);
dove s = °3 = cos μ:
In particolare ponendo
0
E
Kz;0
C
2P zG
= c; ¡
= ½2 ; ¡ 0 = h;
= ½k; r = ½¸;(2.32)
A
A
P zG
A
dove c e ½ sono due costanti positive dipendenti esclusivamente
dalla distribuzione delle masse nel corpo; mentre h; k; ¸ (al pari
di E; Kz;0 e r da cui di®eriscono per un coe±ciente di omogeneitμa)
sono costanti di integrazione ridotti a numeri puri. Con tali posizioni gli integrali primi (2.21) e (2.22) assumono la forma
p°1 + q°2 = ½(k ¡ c¸s);
(2.33)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2.4 Rotazioni uniformi del giroscopio pesante
p2 + q2 = ½2 (¡s + h ¡ c¸2 );
onde sostituendo nella identitμa
³
77
(2.34)
´
(p°1 + q°2)2 + (p°2 ¡ q°1 )2 = p2 + q 2 (1 ¡ °32 )
³
´
= p2 + q 2 (1 ¡ s2 )
(2.35)
e tenendo conto della terza delle equazioni (2.15), si ottiene per la
s l'equazione preannunciata
s_2
= (1 ¡ s2 )(¡s + h ¡ c¸2) ¡ (c¸s ¡ k)2 :
2
½
(2.36)
Essa costituisce la risolvente del problema del moto del giroscopio pesante perch¶e non appena si μe determinata l'espressione
s = °3 dalla (2.36) in funzione del tempo, si trovano (vedremo
poi come) con eliminazioni e quadrature le analoghe espressioni
degli altri elementi incogniti del moto, cio¶e di °1 ; °2 ; p; q (r μe
costante) o, addirittura, dei due angoli di Eulero Ã; '. Resta
cosμ³ stabilita la integrabilitμ
a per quadrature del problema
del moto del giroscopio pesante.
Discussione della equazione risolvente
Escludiamo il caso ¸ = 0 (cio¶e il caso r = 0 che ci riporterebbe al
caso caso di rotazione nulla attorno all'asse giroscopico e quindi al
pendolo sferico) e studiamo l'andamento qualitativo delle soluzioni
della equazione risolvente (2.36). Tale discussione si fonda sulla
indagine delle radici (reali) del polinomio di terzo grado che compare nella (2.36):
f (s) = f (s; ¸; h; k)
= (1 ¡ s2)(¡s + h ¡ c¸2 ) ¡ (c¸s ¡ k)2 :
(2.37)
Anzitutto si osservi che
lim f(s) = §1:
s!§1
Inoltre si hanno i seguenti casi:
a) c¸ 6= §k allora f (§1) = ¡(§¸c ¡ k)2 < 0 e quindi f(s) ammette certamente una radice s3 > +1; inoltre, a seconda del
valore che f (s0) ¸ 0 assume (s0 μe il valore iniziale), si ha che:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
78
2 Dinamica dei solidi
a1 )f(s0 ) > 0 allora il trinomio f(s) ammette tre radici reali
semplici s1 ; s2 ; s3 con s3 > +1 e s1; s2 appartenenti all'intervallo (¡1; +1);
a2 )f(s0 ) = 0, se s0 μe radice doppia s1 = s2 = s0 allora la terza
radice s3 μe comunque maggiore di +1 e la funzione f (s) si
mantiene negativa in tutto l'intervallo (¡1; +1) ¡ fs0g;
a3 )se invece f(s0 ) μe semplice allora, come nel caso a1 ) la funzione f(s) ammette due radici s1 e s2 interne all'intervallo
(¡1; +1) e la terza s3 maggiore di +1.
b) Per c¸ = ¡k, il polinomio f(s) assume valore negativo in +1
ed μe nullo in ¡1, quindi f (s) ammette certamente una radice
s3 > +1; inoltre, si hanno due possibilitμa:
b1)¡1 μe radice doppia, s1 = s2 = ¡1, allora il polinomio f(s) μe
negativo all'interno dell'intervallo (¡1; +1] ed ha una terza
radice s3 > +1;
b2)se invece s1 = ¡1 μe radice semplice allora deve essere necessariamente s2 interna all'intervallo (¡1; +1).
c) In¯ne nel caso c¸ = +k il polinomio f(s) ammette la radice
+1; ma, all'infuori di questa circostanza si possono presentare
per le altre due radici tutti i casi possibili:
c1)f(s) ha una radice tripla e questa μe necessariamente +1;
c2)f(s) ha una radice semplice in +1 ed una radice doppia
all'interno di (¡1; +1);
c3)f(s) ha una radice doppia in +1 ed ha una radice semplice
esterna all'intervallo (¡1; +1);
c4)f(s) ha una radice doppia in +1 ed ha una radice semplice
interna all'intervallo (¡1; +1).
Caso delle radici semplici: moti con nutazione dell'asse giroscopico
Nel caso di due radici semplici ¡1 < s1 < s2 < +1 la funzione
s = cos μ, al trascorrere del tempo, oscilla inde¯nitamente fra i due
valori estremi s1 ed s2 ; il che, nei riguardi del giroscopio, vuol dire
che l'asse descrive nello spazio una super¯cie conica sempre compresa fra i due coni di rotazione ad asse verticale di semi-apertura
cos¡1 s1 = μ1 > μ2 = cos¡1 s2 , e raggiunge alternativamente l'uno
e l'altro (moto di nutazione dell'asse giroscopico). In particolare la traiettoria (sferica) del punto V (detta traiettoria del
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2.4 Rotazioni uniformi del giroscopio pesante
79
vertice) μe tutta compresa fra i due paralleli μ1 e μ2 e va, alternativamente dall'uno all'altro in modo periodico.
Andamento della curva al vertice
Sempre nel caso di due radici semplici ¡1 < s1 < s2 < +1 siamo
interessati ora a studiare l'andamento della curva del vertice V
sulla super¯cie sferica con particolare riguardo al caso in cui tocca
i paralleli. Si ricerca l'angolo ® che la tangente alla curva al vertice,
in un suo generico punto, forma con il meridiano passante per essa
0
di versore u. Questo versore, come ortogonale a k^ e parallelo al
^ k^0 , risulta parallelo al componente equatoriale
piano verticale k;
^ cio¶e a °1^³0 + °2^´0 , quindi si puμo scrivere
di k,
°1^³0 + °2^´0
°1^³0 + °2^´0
u= q
= p
:
1 ¡ s2
1 ¡ °32
(2.38)
D'altra parte la velocitμa del vertice V , estremo libero del versore
^k0 applicato in O 0 , μe data da
0
¯
¯
¯
¯
¯ = p2 + q 2 :
¯
¯
0 ¯2
^
¯ dk
0
dk^
= ! £ k^ ) ¯¯
dt
¯ dt
Per la de¯nizione di prodotto scalare si ha
¯ 0
¯2
^
¯ dk
¯
¯
¯
¢
u
¯ dt
¯
s_ 2
2
:
cos ® = ¯ 0 ¯2 =
^ ¯
¯ dk
(1 ¡ s2 )(p2 + q2 )
¯
¯
¯ dt ¯
(2.39)
dalle (2.38) e dalla terza delle equazioni (2.15). Quindi nell'istante in cui il vertice va a trovarsi sull'uno o sull'altro dei paralleli
estremi, essendo s_ = 0 ed essendo s1;2 6= §1 si ha cos ® = 0
(supponendo inoltre che nell'istante considerato p e q non sono
entrambi nulli); il che vuol dire che in generale la curva del
vertice risulta tangente ai paralleli estremi nei punti, in
cui alternativamente, li raggiunge.
Resta il caso eccezionale in cui p = q = 0 quando il vertice
raggiunge un parallelo estremo. Dalla (2.39) segue che per s_ 6= 0
devono essere, necessariamente, p e q non nulli. Poich¶e poi, in
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
80
2 Dinamica dei solidi
corrispondenza di una delle due radici s = s1 o s = s2 sia p = q = 0
μe necessario che per una tale radice sussistano simultaneamente
dalle (2.33) e (2.34) le due equazioni
k ¡ c¸s = 0; ¡s + h ¡ c¸2 = 0:
Se poniamo s¹ = k=c¸ allora la condizione necessaria a±nch¶e
sia p = q = 0 in corrispondenza a s = s1 o s = s2 μe che sia
k
= h ¡ c¸2
c¸
(2.40)
e che s1 = s¹ o s2 = s¹. Nel caso sia veri¯cata la condizione (2.40)
le (2.34) e (2.36) prendono la forma
p2 + q 2 =
½2
(¡c¸s + k)
c¸
e
s_ 2 =
½2
(1 ¡ s2 )(¡cs¸ + k) ¡ ½2(cs¸ ¡ k)2;
c¸
e la (2.39) in questo caso si puμo scrivere
cos2 ® = 1 + c¸
c¸s ¡ k
(1 ¡ s2 )
e mostra che, quando s tende al suo valore estremo s¹ = k=c¸,
cos ® tende a 1; quindi, dato il carattere oscillatorio della s, la
curva del vertice, nei punti che ha comuni con il parallelo
considerato, presenta una cuspide a tangente meridiana.
Si aggiunge, in¯ne, che una tale eventualitμ
a puμ
o presentarsi
soltanto sul parallelo superiore. Infatti, la soluzione s1;2 =
s¹ = k=c¸ μe, per il polinomio f(s) la maggiore delle due radici
semplici comprese tra ¡1 e +1 poich¶`e
f 0(s = k=c¸) = ¡½2 (1 ¡ k 2 =c2 ¸2 ) < 0:
k
Quindi, per ¡1 < s1 < s2 < +1 e ad esclusione del caso c¸
=
2
h ¡ c¸ , il vertice tocca i paralleli minimo e massimo in
k
modo tangente; nel caso particolare c¸
= h ¡ c¸2 il vertice
tocca in modo tangente il parallelo minimo e forma una
cuspide verticale quando tocca il parallelo massimo.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2.4 Rotazioni uniformi del giroscopio pesante
81
2.4.2 Discussione del moto di precessione Ã(t)
Andiamo a studiare l'andamento dell'angolo di precessione à durante il moto. Dalla (2.21) e dal fatto che Cr = Kz 0 ;0 μe un integrale
primo del moto si ottiene che
Kz;0 ¡ Kz 0 ;0 cos μ
:
A
D'altra parte le (2.6) e le (2.16) danno
p°1 + q°2 =
p°1 + q°2 = (μ_ cos ' + Ã_ sin ' sin μ) sin ' sin μ +
+(¡μ_ sin ' + Ã_ cos ' sin μ) cos ' sin μ
= Ã_ sin2 μ
ottenendo in¯ne
k ¡ c¸s
a ¡ bs
Kz;0 ¡ Kz 0 ;0 cos μ
=
=½
Ã_ =
2
2
A sin μ
1¡s
1 ¡ s2
K
z ;0
dove s = cos μ, a = KAz;0 = ½k e b = A
= cr = ½c¸.
Se s¹ = c¸=k μe interno all'intervallo (s1 ; s2 ) allora la velocitμa di
precessione sui paralleli, de¯niti da μ1 e μ2 , μe opposta e il vertice V
si muove sulla super¯cie sferica tracciando una curva con dei nodi;
se invece μe esterno allora il moto di precessione μe monotono; in¯ne
abbiamo il caso limite in cui uno dei due valori s1 o s2 coincide con
s¹, questo caso μe giμa stato visto in precedenza e la curva presenta
una cuspide quando tocca una delle due quote (necessariamente
quella corrispondente al parallelo massimo).
0
Caso delle radici multiple e moti Merostatici
Esaminiamo il caso in cui il polinomio f(s) ammetta nell'intervallo da ¡1 a +1 (estremi inclusi) una radice multipla s0. Esclusa
l'eventualitμa c¸ = k, sappiamo che non puμo trattarsi se non di una
radice doppia s0, isolata nel senso che il polinomio f (s) in ogni altro punto dell'intervallo risulta negativo. Il moto corrispondente
μe di necessitμa un moto merostatico, in cui conserva inde¯nitamente il suo valore iniziale s0 . Ciμo vuol dire che l'asse
giroscopico appartiene costantemente al cono di rotazione intorno
μ facile veri¯care che
alla verticale di angolo μ0 = cos¡1 s0 . E
il moto del solido si riduce ad una precessione regolare:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
82
2 Dinamica dei solidi
0
e
e°3
1
0
A^
!=q
k^ + @r ¡ q
k;
2
2
1 ¡ °3
1 ¡ °3
dove r = r0 e °3 = s0 sono costanti. Infatti, dalla costanza di
°3 = s0 risulta pure costante la somma jej2 = p2 + q2 . D'altra
parte la costanza di °3 implica l'ulteriore relazione °2p ¡ °1q = 0,
cio¶e p=q = °1 =°2, da cui segue che deve essere
³
0´
e
e
(°1^³0 + °2^´0 ) = q
e= q
k^ ¡ °3 ^k
1 ¡ °32
1 ¡ °32
da cui segue la tesi.
Determinazione completa del moto
Facciamo in¯ne vedere che, una volta determinata °3 integrando
la (2.36), anche gli altri elementi (p, q, °1 e °2 ) si possono calcolare
con quadrature. Dalle (2.33) e (2.35) segue che
p°1 + q°2 = £1 (t) e q°1 ¡ p°2 = £2 (t)
dove £1 e £2 denotano due funzioni note una volta sia noto s =
s(t). Denotando ³ = p + iq e ¹ = °1 + i°2 segue che
³ ¹ = £1 + i£2
ovvero ³ = ¹
£1 + i£2
:
1 ¡ °32
(2.41)
D'altra parte dalle (2.15) risulta
¹_ = ¡ir¹ + i°3³
che, unitamente alla (2.41) dμa
£1 + i£2
d log ¹
= ¡ir + i°3
dt
1 ¡ °32
che, mediante una quadratura, permette di determinare ¹ = ¹(t)
e quindi °1 (t) = <¹ e °2 = =¹. Inoltre, nota ¹(t), μe possibile
determinare poi ³(t), e quindi p(t) e q(t), dalla (2.41).
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2.5 Trottola veloce
83
2.5 Trottola veloce
Ipotizziamo che la componente costante r della velocitμa angolare
giroscopica sia, durante tutto il moto, rilevante non solo di fronte
alle altre due componenti p e q, ma anche di fronte alla costante
strutturale ½ de¯nita dalla relazioni (2.32); da quest'ultima ipotesi
segue che anche la costante ¸ de¯nita dalle (2.32) va ritenuta molto
grande. Quindi una trottola si dice "veloce" se l'energia cinetica
di rotazione μe molto maggiore dell'energia potenziale, cio¶e se
1 2
0
Cr À mgzG
:
2
Inoltre dall'integrale primo dell'energia nella forma (2.34) segue
che
h = c¸2 + h1 ; h1 =
p2 + q 2
+s
½2
(2.42)
dove h1 μe indipendente da ¸ e molto piccolo rispetto a ¸ stesso.
Analogamente l'integrale primo (2.33) del momento assiale della
quantitμa di moto si puμo scrivere
k = c¸s + R1 ; R1 =
p°1 + q°2
½
(2.43)
dove il termine R1 μe un termine indipendente da ¸; cosicch¶e se ne
trae
s = °3;0 ¡
R1
;
c¸
(2.44)
dove R1=c¸ si mantiene trascurabile di fronte alla grandezza
costante s¹ = °3;0 = k=c¸. Riconosciamo cosμ³ che, quando il
giroscopio μe animato di una rotazione rapida intorno al suo asse,
questo conserva sensibilmente un'inclinazione costante
sulla verticale (cos μ¹ = s¹ = k=c¸).
Piccole oscillazioni del moto di nutazione
Porremo quindi come valore approssimato di k
k = c¸¹
s;
(2.45)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
84
2 Dinamica dei solidi
e riterremo s¹ 6= §1, cio¶e escluderemo k 6= §c¸. Per studiare le
piccole oscillazioni di s intorno ad s¹, cio¶e il moto di nutazione,
porremo
s = s¹ + ¾;
(2.46)
dove ¾ = O(¸¡1) va trattato come una quantitμa del primo ordine.
Se s¹ (6= §1) μe esattamente radice doppia del polinomio f(s), il
moto del giroscopio si riduce ad una precessione regolare e si ha
rigorosamente s ´ s¹, cio¶e ¾ = 0. Esclusa questa eventualitμa s_
non si annulla identicamente e, derivando la (2.36) rispetto a t e
dividendola per s,
_ si ricava
2Ä
s
= f 0(s);
½2
e basta sostituirvi s¹ +¾ ad s e tenere conto che ¾ va trattato quale
una quantitμa del primo ordine per ottenere, come caratteristica di
¾, l'equazione lineare
1
1
s)¾ ¡ ½2 f 0 (¹
s) = 0:
¾Ä ¡ ½2 f 00 (¹
2
2
Questa equazione di®erenziale prende la forma
¾
Ä + c2 r2 ¾ ¡ a½2 = 0;
dove abbiamo posto
2a = f 0(¹
s) = ¡2¹
s(¡¹
s + h1 ) ¡ (1 ¡ s¹2) = ¡1 ¡ 2h1 s¹ + 3¹
s2
e
f 00 (¹
s) = ¡2c2 ¸2 ¡ 2h1 + 6¹
s ¼ ¡2c2 ¸2 :
Ponendo, in¯ne, ¾1 = ¾ ¡
a½2
=¾
c2 r 2
¡
a
c2 ¸2
assume la forma ¯nale
¾Ä1 + c2 r2 ¾1 = 0;
che μe quella caratteristica dei moti armonici e che ha integrale
generale
¾1(t) = ²0 cos[cr(t ¡ t0)]
dove ²0 e t0 sono due costanti. Quindi
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2.5 Trottola veloce
s = s¹ + ²0 cos[cr(t ¡ t0)] +
85
a
c2 ¸2
da cui, essendo s(0) = s¹+O(¸¡1 ) e s(0)
_
= s¹_ si ottiene ²0 = O(¸¡1 ).
In particolare, essendo s¹ 6= §1, il divario angolare ² = μ ¡ μ¹ si puμo
porre sotto la forma ² = ²1 + ²2 dove il primo addendo
a
²1 = ¡ 2 2
(2.47)
c ¸ sin μ¹
μe un numero dipendente dalle costanti iniziali e, in ogni caso piccolo per e®etto del denominatore c2 ¸2 ; mentre il secondo addendo
μe dato da:
¾1
²0
²2 = ¡
= ~²0 cos[cr(t ¡ t0)]; ~²0 =
= O(¸¡1): (2.48)
¹
sin μ
sin μ¹
Si ottiene la formula
μ ¡ μ¹ = ²1 + ~²0 cos [cr(t ¡ t0 )] ¼ ~²0 cos [cr(t ¡ t0 )] ;
(2.49)
la quale fornisce l'espressione approssimata della nutazione, tanto
piμ
u attendibile quanto piμ
u μe rilevante ¸. La frequenza delle piccole
oscillazioni attorno a s¹ μe data da
C
!nut = cr = r:
A
Moto di precessione e di nutazione nel caso di piccole oscillazioni
Da quanto μe noto le espressioni degli altri due angoli di Eulero Ã
e ' soddisfano alle due equazioni
½(k ¡ c¸s)
_
; '_ = r ¡ Ãs:
Ã_ =
1 ¡ s2
(2.50)
Poich¶e s di®erisce da s¹ = k=c¸ per termini dell'ordine 1=¸ e ½¸ =
r, la Ã_ assume la forma
s ¡ s¹
cr²0
¼¡
cos[cr(t ¡ t0)] + º
Ã_ = ¡cr
2
1¡s
1 ¡ s¹2
dove abbiamo posto º =
à = ºt +
½a
.
c¸(1¡¹
s2 )
Da qui si desume
²0
sin [cr(t ¡ t0)] + cost:
1 ¡ s¹2
(2.51)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
86
2 Dinamica dei solidi
Come si vede, Ã risulta dalla somma di due termini, di cui il primo,
proporzionale al tempo, corrisponde ad una rotazione uniforme
dell'asse di ¯gura, lenta di fronte alla rotazione giroscopica (di velocitμa angolare r), mentre il secondo, periodico (di periodo 2¼=cr),
dμa luogo a piccole oscillazioni intorno a tale moto precessionale.
Resta da valutare '. Sostituendo anche nella espressione (2.50)
di '_ a s il suo valore medio s¹, si ottiene
_ s;
'_ ¼ r ¡ ù
da cui
' = (r ¡ º¹
s)t ¡
s¹²0
sin [cr(t ¡ t0 )] + cost:
sin μ¹
(2.52)
che in prima approssimazione si riduce a ' ¼ rt.
2.6 Stabilitμ
a del moto del giroscopio pesante.
2.6.1 Stabilizzazione giroscopica e trottola "addormentata".
Ci proponiamo di discutere la stabilitμa, ridotta ai parametri
p; q; r; s, delle rotazioni permanenti del giroscopio pesante intorno
all'asse giroscopico diretto verticalmente all'insμ
u (s = +1; ¸
arbitrario) essendo manifesta la stabilitμa nel caso dell'asse verticale disposto all'ingiμ
u. Faremo vedere che per velocitμa abbastanza
grandi si ha stabilitμa (fenomeno di stabilizzazione giroscopica)
mentre per velocitμa inferiori di un certo valore si ha instabilitμa.
Un esempio classico di questo risultato μe costituito dalla trottola.
Infatti, mentre per una trottola, appoggiata al suolo con l'asse
disposto verticalmente all'insμ
u, μe instabile, al pari dello stato di
equilibrio, ogni rotazione lenta, basta imprimerle una velocitμa angolare rilevante perch¶e essa risulti stabile; questo caso prende il
nome di trottola addormentata o dormiente; infatti per rotazioni molto veloci essa appare "ferma" (relativamente al moto
dell'asse giroscopico) e non appena, per e®etto dell'attrito, la velocitμa di rotazione diminuisce sotto una certa soglia la trottola si
"sveglia", cio¶e il moto dell'asse giroscopico diventa osservabile.
Per studiare la stabilizzazione giroscopica assumiamo come
soluzione (merostatica) campione ¾
¹ una qualsiasi delle rotazioni
uniformi intorno all'asse giroscopico, diretto verticalmente all'insμ
u,
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2.6 Stabilitμ
a del moto del giroscopio pesante.
87
cio¶e una ¾
¹ per cui sia s = +1; p = 0; q = 0 mentre a ¸ e, quindi,
ad r compete un valore costante generico. Consideriamo ora una
generica ¾ inizialmente prossima a ¾
¹ ; cio¶e tale che il valore iniziale s0 di s sia prossimo a +1 e i valori iniziali p0 e q0 di p e
q siano prossimi a zero (r coincide sempre con r0 e lo prendiamo
coincidente con quello di ¾
¹ ). Ora dall'integrale delle forze vive
p2 + q2 = ½2 (¡s + h ¡ c¸2 );
(2.53)
valida sia per la ¾ che per ogni altra soluzione, si deduce che la
stabilitμ
a relativa alle s; p; q (ed r) non si diversi¯ca da
quella ridotta all'unico parametro s. Infatti, se la s di ¾
si mantiene prossima al suo valore iniziale s0 , allora altrettanto
avviene per p2 + q2 che inizialmente ha il valore di p20 + q02 che μe
prossimo a zero e quindi sia p che q si mantengono piccoli. Conseguentemente possiamo limitarci a controllare il divario tra s e
+1.
Come sappiamo l'andamento della s(t) corrispondente a tale
¾ si rileva dalla posizione (e dalla molteplicitμa) delle radici che il
polinomio
f(s; ¹̧ + ¸1 ; ¹h + h1 ; k¹ + k1 )
(2.54)
eventualmente ammette nell'intervallo da s = ¡1 ad s = 1. ¸1 =
h1 = k1 = 0 corrispondono al caso ¾
¹ e le costanti di integrazione
¹h; k¹ sono date in termini della corrispondente ¹̧ dalle
¹h = c ¹̧ 2 + 1;
k¹ = c ¹̧ ;
(2.55)
¹ k)
¹ ha per s = 1 soluzione almeno
poich¶e p¹ = q¹ = 0 e f(s; ¹̧ ; h;
doppia. Quindi la (2.37) si riduce a
¹ = (1 ¡ s)2(1 ¡ c2 ¹̧ 2 + s)
f (s; ¹̧ ; ¹h; k)
(2.56)
μ manifesto che, per
che ha radici s¹1 = s¹2 = +1 e s¹3 = c2 ¹̧ 2 ¡ 1. E
ragioni di continuitμa, per ¸1 ; h1 ; k1 prossimi a zero il polinomio
(2.54) avrμa due radici s1 ; s2 prossime entrambe a +1 e, in piμ
u,
una terza radice s3 prossima a s¹3 = c2 ¹̧ 2 ¡ 1. Si prova che:
a) Ogni rotazione permanente ¾
¹ , la cui velocitμa angolare renda
soddisfatta la disuguaglianza
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
88
2 Dinamica dei solidi
j¹̧ j >
p
2
c
(2.57)
μe stabile; infatti, in tal caso s¹3 > +1 e quindi il polinomio (2.54)
ha due radici s1 e s2 prossime a +1 ed una s3 > +1; quindi il
moto avviene con s(t) che oscilla tra s1 e s2, cio¶e in prossimitμa
di +1;
b) Altrettanto puμo dirsi nel caso limite
p
2
j ¹̧ j =
;
(2.58)
c
in cui s¹3 = +1, che dμa luogo alla radice tripla s = +1, giacch¶e
qui ancora la piμ
u grande delle tre radici corrispondenti ad una
generica ¾, inizialmente prossima a ¾
¹ , μe di necessitμa vicina a
+1.
c) Se
invece la s¹3 μe interna all'intervallo (¡1; +1), cio¶e se j ¹̧ j <
p
2
, quindi la ¾ ha tre radici ¡1 < s3 < s1 · +1 · s2 e quindi
c
la s oscilla inde¯nitamente tra s1 ed s3 e quindi si scosta da +1
per un intervallo ¯nito dando luogo alla instabilitμa di ¾¹ .
Si puμo concludere che: delle rotazioni uniformi del giroscopio pesante intorno all'asse giroscopico, disposto verticalmente con il baricentro al di sopra del punto ¯sso, quelle
veloci (c2¸2 ¸ 2) sono stabili. La velocitμ
a critica, al di sotto
della quale si perde la stabilitμa μe data da
jrj =
2q
0
AjpjzG
:
C
Instabilitμ
a delle precessioni regolari del giroscopio pesante
Si assuma come soluzione campione ¾¹ una generica precessione
regolare per cui la s = cos μ conserva, durante tutto il moto, il
suo valore iniziale s¹0 = cos μ¹0 dove s¹0 μe una radice doppia del
polinomio f(s) interna all'intervallo (¡1; +1) (μe interna altrimenti
si rientrerebbe nel caso precedente). Il polinomio f(s) ammette
quindi, per ogni altra soluzione ¾ prossima a ¾
¹ , due radici reali
prossime a s¹0 e quindi nei riguardi del solo parametro s ogni
precessione regolare risulta stabile. Ma questa stabilitμ
a ridotta
non implica, a di®erenza del caso precedente, la stabilitμ
a globale
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
2.6 Stabilitμ
a del moto del giroscopio pesante.
89
relativa ai parametri p e q. Infatti in virtμ
u dell'integrale delle forze
vive
p2 + q2 = ½2 (¡s + h ¡ c¸2 );
(2.59)
la somma p2 + q2 si mantiene prossima al suo valore iniziale p20 +q02
e quindi a p¹20 + q¹02 (che non μe arbitrariamente piccolo) ma ciμo non
implica che p e q si mantengano, rispettivamente prossimi a p0 e
q0 .
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
3
Equazioni di Lagrange
3.1 Principio del d'Alembert e relazione simbolica della
Dinamica
Distinguendo tra forze attive e vincolari durante il moto varranno le equazioni fondamentali
mas = Fs + Ás ; s = 1; : : : ; N;
(3.1)
che si possono scrivere
Fs ¡ mas = ¡Ás :
(3.2)
Per sistemi a vincoli perfetti la relazione
N
X
s=1
Ás ¢ ±Ps ¸ 0 =)
N
X
s=1
(Fs ¡ ms as ) ¢ ±Ps · 0
(3.3)
μe da considerarsi valida per tutti e soli gli spostamenti virtuali
±Ps , a partire dalla con¯gurazione assunta dal sistema, durante il
suo moto, nel generico istante che si considera. La (3.3) prende
il nome di relazione simbolica della Dinamica; nel caso di
spostamenti invertibili va sostituita alla corrispondente equazione
N
X
s=1
(Fs ¡ ms as ) ¢ ±Ps = 0
(3.4)
detta equazione simbolica della Dinamica.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
92
3 Equazioni di Lagrange
3.2 Equazioni di®erenziali del moto di un sistema
olonomo
Riferiamo il nostro sistema olonomo ad una n¡upla qualsiasi di
coordinate lagrangiane indipendenti qh , dove n denota il grado di
libertμa del sistema. Le relazioni Ps = Ps (q; t) derivate rispetto al
tempo danno le velocitμa
vs =
n
X
@Ps
h=1
@qh
q_h +
@Ps
@t
(3.5)
e gli spostamenti virtuali
±Ps =
n
X
@Ps
h=1
@qh
±qh ;
(3.6)
dove le n componenti ±qh sono arbitrarie e indipendenti.
Riprendendo la equazione simbolica della Dinamica, considerata
valida per tutti gli spostamenti virtuali invertibili, si ha:
N
X
s=1
ms as ¢ ±Ps =
N
X
s=1
Fs ¢ ±Ps :
(3.7)
Il secondo membro μe il lavoro virtuale ±L delle forze attive e vale
l'identitμa
N
X
s=1
Fs ¢ ±Ps =
n
X
Qh ±qh
h=1
dove
Qh =
N
X
s=1
Fs ¢
@Ps
@qh
(3.8)
μe la componente della sollecitazione attiva secondo la coordinata Lagrangiana qh . Quanto al primo membro della (3.7)
esso si puμo scrivere, dalla (3.6), come
N
X
s=1
ms as ¢ ±Ps =
n
X
h=1
¿h ±qh ;
dove ¿h =
N
X
s=1
ms as ¢
@Ps
: (3.9)
@qh
In base alla arbitrarietμa dei termini ±qh e alle due identitμa (3.8)
e (3.9) l'equazione simbolica della Dinamica (3.4) equivale alle n
equazioni:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
3.2 Equazioni di®erenziali del moto di un sistema olonomo
¿h = Qh ;
h = 1; 2; : : : ; n:
93
(3.10)
Si conclude cosμ³ che per ogni sistema olonomo, a vincoli lisci
e bilateri le n equazioni (3.10) equivalgono alla equazione
simbolica della Dinamica e devono essere soddisfatte durante il moto.
Le (3.10) si possono poi scrivere nella seguente forma, dette
equazioni di Lagrange:
@T
d @T
¡
= Qh ; h = 1; 2; : : : ; n:
dt @ q_h @qh
(3.11)
La dimostrazione μe immediata e segue ricordando che
T =
N
1X
ms v s ¢ v s
2 s=1
e notando che dalla (3.5) risulta
@vs
@Ps
=
@ q_h
@qh
e
d @Ps
@ dPs
@vs
=
=
;
dt @qh
@qh dt
@qh
allora
N
X
@T
@vs
=
ms v s ¢
@qh s=1
@qh
e
N
N
X
@T
@vs X
@Ps
=
ms v s ¢
=
ms vs ¢
:
@ q_h s=1
@ q_h s=1
@qh
Derivando quest'ultima rispetto al tempo si ottiene che
d
dt
Ã
@T
@ q_h
!
=
N
X
s=1
ms as ¢
N
@Ps X
@vs
@T
+
ms v s ¢
= Qh +
:
@qh s=1
@qh
@qh
Notiamo che, nelle (3.11), tutto ciμo che dipende dalla sollecitazione attiva μe riassunto nelle sue componenti lagrangiane Qh ,
tutto quello che attiene alla struttura materiale del sistema μe sintetizzato nell'unico elemento globale T , cio¶e nella forza viva. Esse
danno la completa impostazione del problema del moto di un
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
94
3 Equazioni di Lagrange
sistema olonomo; sotto l'aspetto analitico, costituiscono un sistema di®erenziabile del II ± ordine nelle n funzioni incognite qh (t),
riducibile a forma normale.
Noti i valori qh0 e q_h0 di qh e q_h in un determinato istante, cio¶e
assegnate la con¯gurazione iniziale del sistema e le velocitμa iniziali
dei singoli punti, allora avremo, per i noti teoremi di esistenza ed
unicitμa delle equazioni di®erenziali, una unica soluzione qh = qh (t)
delle (3.11) che darμa, necessariamente, il moto del sistema. Cio¶e:
assumendo i vincoli perfetti, bilateri e olonomi e le necessarie condizioni di regolaritμ
a sulle forze e sulle relazioni che
de¯niscono le con¯gurazioni del sistema a partire dalle coordinate lagrangiane, dai teoremi di esistenza e unicitμa delle soluzioni
delle equazioni di®erenziali segue che le soluzioni delle equazioni
di Lagrange, assegnate le condizioni iniziali, sono uniche e quindi
devono necessariamente coincidere con le leggi del moto; ovvero
le soluzioni delle equazioni di Lagrange danno il moto del
sistema.
3.3 Funzione Lagrangiana
Supponiamo che le forze
attive Fs derivino da un potenziale Us ;
P
quindi U = U(q; t) = N
s=1 Us (Ps ) e, in coordinate lagrangiane,
@U
Qh = @qh . Da ciμo, e dalla indipendenza di U da q_h , le equazioni
di Lagrange assumono la forma
@L
d @L
¡
= 0; h = 1; 2; : : : ; n;
dt @ q_h @qh
(3.12)
_ q; t) = L = T + U = T ¡ V:
L(q;
(3.13)
dove si μe posto
Alla funzione L si dμa il nome di funzione Lagrangiana.
3.4 Coordinate cicliche e Lagrangiana ridotta
_ q; t), de¯niamo moAssegnata la funzione Lagrangiana L = L(q;
@L
menti cinetici le derivate ph = @ q_h .
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
3.4 Coordinate cicliche e Lagrangiana ridotta
95
Se supponiamo che la funzione Lagrangiana L sia indipendente
da una (o piμ
u) delle variabili qh , per esempio dalla q1, allora l'equazione (3.12) di indice h = 1 fornisce immediatamente l'integrale primo
p1 =
@L
= Cost::
@ q_1
(3.14)
Gli integrali di questo tipo si dicono integrali primi dei momenti e le coordinate qh , che non comparendo nella funzione Lagrangiana danno luogo a tali integrali, si chiamano ignorabili o
cicliche.
Se nella funzione Lagrangiana L alcune (per ¯ssare le idee le
prime m) coordinate qk , k = 1; : : : ; m, sono cicliche, cio¶e
L = L(q_1 ; : : : ; q_n ; qm+1; : : : ; qn ; t) = L(q;
_ q0 ; t); q0 = (qm+1 ; : : : ; qn )
allora il corrispondente sistema lagrangiano ammette gli m integrali primi dei momenti
pk =
@L
= ck = cost:; k = 1; 2; : : : ; m:
@ q_k
(3.15)
Supponiamo che il sistema delle m equazioni (3.15) sia risolubile
rispetto ad m delle q;
_ ciμo μe sempre vero quando il rango della
matrice Hessiana
Ã
@2L
@ q_h @ q_k
!
h=1;:::;n; k=1;:::;m
μe uguale a m. Nel caso particolare in cui L = T + U allora l'Hessiano μe una matrice de¯nita positiva e quindi il minore formato
dalle prime m righe e colonne ha determinante non nullo; cosicch¶e
le equazioni (3.15) sono risolubili rispetto alle derivate q_k delle m
coordinate cicliche qk ottenendo
q_k = q_k (q_ 0 ; q0 ; t); q0 = (qm+1 ; : : : ; qn ):
(3.16)
Le ultime n ¡ m equazioni di Lagrange
d @L
@L
¡
= 0; h = m + 1; : : : ; n;
dt @ q_h @qh
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
96
3 Equazioni di Lagrange
che giμa per ipotesi non contengono le q1 ; : : : ; qm , si possono quindi
rendere indipendenti anche dalle componenti q_k ; qÄk , k = 1; : : : ; m,
sostituendo a ciascuna di queste l'espressione in termini delle qh ,
q_h , qÄh (h > m) e delle ck fornita dalle (3.16). Si perviene cosμ³ ad
un sistema di®erenziale del secondo ordine, che coinvolge soltanto
le n ¡ m incognite qh (h = m + 1; : : : ; n).
μ possibile provare che questo sistema nelle residue n ¡ m coE
ordinate lagrangiane conserva ancora la forma Lagrangiana dove
per Lagrangiana si ha la funzione Lagrangiana ridotta data
da
L? = L ¡
m
X
ck q_k ;
(3.17)
k=1
dove alle q_k vanno sostituite le loro espressioni in termini delle
qh ; q_h , h = m + 1; : : : ; n e ck , k = 1; : : : ; m, date dalla (3.16).
Le veri¯ca μe immediata, per ¯ssare le idee assumiamo m = 1 e
la sola prima coordinata ciclica in modo che sia (esprimendo la
dipendenza)
L? = L?(q_ 0 ; q0 ; c1 ; t)
= L [q_1 (q_ 0 ; q0 ; c1 ; t); q_ 0; q0; t] ¡ c1 q_1 (q_ 0; q0; c1 ; t)
dove q0 = (q2 ; : : : ; qm ) e quindi
@L?
@L
@L @ q_1
@ q_1
@L
=
+
¡ c1
=
; h > 1;
@qh
@qh @ q_1 @qh
@qh
@qh
in virtμ
u delle (3.15). Analogamente si ottiene
@L
@L @ q_1
@L
@L?
@ q_1
=
+
¡ c1
=
; h > 1:
@ q_h
@ q_h @ q_1 @ q_h
@ q_h
@ q_h
Il caso m > 1 μe perfettamente analogo.
Una volta risolte le equazioni di Lagrange per la Lagrangiana
ridotta e quindi determinate le n ¡ m funzioni qh (t), h > m, la
determinazione delle rimanenti qk (t), k · m, funzioni avviene per
quadratura delle equazioni di®erenziali
q_k = ¡
@L?
:
@ck
Infatti, assumendo ancora m = 1,
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
3.5 Esempio: problema di Keplero.
97
@L @ q_1
@L?
@ q_1
=
¡ c1
¡ q_1 = ¡q_1
@c1
@ q_1 @c1
@c1
in virtμ
u delle (3.15).
3.5 Esempio: problema di Keplero.
Consideriamo il moto, rispetto ad un osservatore assoluto, di un
sistema costituito da 2 punti liberi. Poich¶e l'energia potenziale
d'interazione di due particelle dipende soltanto dalla distanza tra
di loro allora la funzione Lagrangiana μe data da
1
1
L = m1 v12 + m2 v22 + U(juj); u = P2 ¡ P1:
2
2
Volendo studiare il moto rispetto ad un sistema di riferimento
relativo poniamo l'origine del sistema di riferimento (traslante)
nel baricentro dei due punti, questo punto G deve soddisfare la
usuale relazione
m1 (P1 ¡ G) + m2 (P2 ¡ G) = 0
da cui segue che deve essere
(P1 ¡ G) =
m2
m
u=
u
m1 + m2
m1
e
m1
m
u=¡ u
m1 + m2
m2
m2
dove abbiamo introdotto la massa ridotta m = mm11+m
e dove ab2
biamo posto u = P2 ¡ P1 il vettore aventi estremi coincidenti con
i due punti. Introducendo, invece che le coordinate dei due punti
quali parametri lagrangiani, la posizione del baricentro ed il vettore u, allora, in virtμ
u del teorema di KÄonig e di quanto detto la
Lagrangiana assume la forma
(P2 ¡ G) = ¡
1
2
+
L = (m1 + m2 )vG
2
1
2
= (m1 + m2 )vG
+
2
1
2
= (m1 + m2 )vG
+
2
Ã
!2
Ã
!2
1
d(P1 ¡ G)
1
d(P2 ¡ G)
m1
+ m2
+ U(u)
2
dt
2
dt
m22
m21
1
1
2
m1
u
_
+
m
u_ 2 + U(u)
2
2 (m1 + m2 )2
2 (m1 + m2)2
1
mu_ 2 + U(u) :
2
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
98
3 Equazioni di Lagrange
dove u = juj. Osserviamo che la Lagrangiana μe indipendente
dalle coordinate (xG ; yG ; zG ) del baricentro e quindi queste sono
coordinate cicliche. Avremo quindi
@L
= (m1 + m2 )x_ G = costante
@ x_ G
@L
py =
= (m1 + m2)y_G = costante
@ y_G
@L
pz =
= (m1 + m2 )z_G = costante
@ z_G
px =
da cui segue che il baricentro si muove di moto rettilineo uniforme.
La Lagrangiana ridotta diventa
L? = L ¡ px x_ G ¡ py y_G ¡ pz z_G
1
1
(p2x + p2y + p2z ) + mu_ 2 + U(u):
=¡
2(m1 + m2 )
2
In conclusione, essendo il potenziale sempre de¯nito a meno di una
costante additiva, si ha che la Lagrangiana ridotta diventa
1
L? = mu_ 2 + U(u)
2
che corrisponde al problema del moto di un punto P di
massa m in un campo esterno dato da U(u) dove u = P ¡O1
con O1 ¯sso. Una volta determinata u(t) μe possibile determinare
poi il moto dei due punti.
Introducendo poi le coordinate polari sferiche (r; μ; ') la Lagrangiana ridotta assume la forma
1
L? = m(r_ 2 + r2 μ_2 + r 2 sin2 μ'_ 2) + U(r)
2
da cui segue immediatamente che ' μe una coordinata ciclica e
quindi
p' =
@L?
= mr2 sin2 μ'_ = costante
@ '_
(3.18)
dove questa costante viene calcolata in virtμ
u delle condizioni iniziali. Ora, assegnata la posizione iniziale e la velocitμa iniziale di
P , possiamo sempre scegliere il sistema di riferimento centrato in
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
3.5 Esempio: problema di Keplero.
99
O1 in modo che sia v(0) incidente sull'asse z e quindi '_ 0 = 0. Con
questa scelta e dalla relazione (3.18) segue che deve essere
p' = mr 2 sin2 μ'_ ´ 0
e quindi ' ´ '0 , cio¶e il moto avviene in un piano ¯sso contenente O1 (e quindi anche il baricentro tra i due punti).
Riducendo ulteriormente la Lagrangiana otteniamo, dove ora μ
e r hanno il signi¯cato di coordinate polari su tale piano, che la
nuova Lagrangiana (denotata sempre nello stesso modo) diventa
1
L? = m(r_2 + r 2μ_2 ) + U(r) ;
2
da cui risulta una ulteriore coordinata ciclica (per questa Lagrangiana ridotta) data da μ e avremo che
pμ =
@L?
= mr2 μ_ = costante:
@ μ_
(3.19)
Questo integrale primo coincide con l'integrale primo dei moμ in¯ne possibile
menti e dμa la costanza della velocitμa areolare. E
ridurre ulteriormente la Lagrangiana ottenendo come (ultima) Lagrangiana ridotta la seguente
1
L? = m(r_2 + r2 μ_2 ) + U(r) ¡ pμ μ_
2 Ã
!
2
1
pμ
2
2 pμ
= m r_ + r 2 4 + U(r) ¡ pμ 2
2
m r
mr
2
1
1 pμ
1
= mr_2 ¡
+ U(r) = mr_ 2 ¡ Ueff (r);
2
2
2 mr
2
dove abbiamo introdotto il potenziale e±cace
Uef f (r) =
1 p2μ
¡ U(r):
2 mr 2
Per completare lo studio di questo problema non utiliziamo le
equazioni di Lagrange ma, facendo uso dell'integrale primo della
energia meccanica
1
E = mr_ 2 ¡ Ueff (r)
2
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
100
3 Equazioni di Lagrange
si ottiene
r_ =
s
2
[E + Uef f (r)] =
m
s
2
p2
[E ¡ U (r)] + 2μ 2
m
mr
da cui, per separazione di variabili,
t=
Z
r
dr
2
[E
m
¡ U (r)] +
p2μ
m2 r 2
+ costante;
che, integrata, dμa r = r(t). Per la determinazione di μ(t) si integra
per quadrature la equazione
@L?
pμ
μ_ = ¡
=
@pμ
mr 2
cio¶e μ(t) =
Z
pμ
dt
mr2 (t)
che, con il cambio di variabili t ! r per il quale dr = rdt,
_ si ottiene
la equazione delle traiettorie
μ(r) =
Z
pμ
r
mr2 (t) 2
m
1
[E ¡ U(r)] +
p2μ
m2 r 2
dr:
3.6 Integrazione per quadrature del giroscopio pesante
Studiamo ora il problema facendo uso delle equazioni di Lagrange
invece che degli integrali primi del moto dedotti attraverso le
equazioni cardinali della Dinamica.
Calcolo della Lagrangiana e coordinate cicliche
Introduciamo la funzione Lagrangiana che, in virtμ
u delle (2.6) assume la seguente forma:
´
1
1 ³
0
cos μ
L = T + U = A p2 + q 2 + Cr2 + P zG
2
2
´
´2
1 ³
1 ³
0
= A μ_2 + Ã_ 2 sin2 μ + C Ã_ cos μ + '_ ¡ mgzG
cos μ:
2
2
Appare quindi immediatamente che le coordinate ' e à sono cicliche e quindi abbiamo i due integrali primi
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
3.6 Integrazione per quadrature del giroscopio pesante
p' =
@L
= C(Ã_ cos μ + ')
_ = Cr = Kz 0 ;0
@ '_
101
(3.20)
e
pà =
³
´
@L
= A sin2 μÃ_ + C cos μ Ã_ cos μ + '_ = Kz;0: (3.21)
@ Ã_
Osserviamo che tali integrali primi coincidono con le componenti
del momento della quantitμa di moto relativa all'asse (O 0 ; z 0 ) e
(O 0 ; z). Come terzo integrale primo abbiamo, al solito, l'energia
meccanica totale (2.11) che scriveremo in coordinate lagrangiane
come
´
´2
A ³ _2
C³_
μ + Ã_ 2 sin2 μ +
à cos μ + '_ + mgzG0 cos μ = E:(3.22)
2
2
Dalle (3.20) e (3.21) si ricava immediatamente
pà ¡ p' cos μ
Ã_ =
A sin2 μ
e '_ =
p'
pà ¡ p' cos μ
¡ cos μ
(3.23)
C
A sin2 μ
che eliminate in (3.22) permettono di ottenere
1 _2
Aμ + Vef f (μ) = E 0
2
0
dove E 0 = E ¡ mgzG
¡ p2' =2C e
Vef f (μ) =
(pà ¡ p' cos μ)2
0
(1 ¡ cos μ)
¡ mgzG
2A sin2 μ
da cui risulta che il problema μe solubile mediante 3 quadrature.
Escludendo i casi particolari pà = §p' andiamo a discutere
la regione di variazione dell'angolo di nutazione μ; questa regione
sarμa de¯nita dalla condizione E 0 ¸ Vef f (μ). Poich¶`e la funzione
Vef f (μ) tende a +1 per i valori μ = 0; ¼ e passa per un minimo nell'intervallo (0; ¼) allora l'equazione Vef f (μ) = E 0 avrμa due
radici μ1 e μ2 (eventualmente coincidenti) che danno gli angoli limite d'inclinazione dell'asse della trotola rispetto alla verticale. La
discussione delle due radici μ1 e μ2 μe giμa stata e®ettuata nel paragrafo precedente.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
4
Piccole oscillazioni
4.1 Teorema di Dirichlet
Ricordiamo che per un sistema meccanico a n gradi di libertμa, con
vincoli perfetti, bilateri, olonomi (e nel seguito supporremo anche
scleronomi) e soggetto ad un sistema di forze conservative valgono
le equazioni di Lagrange
@L
d @L
=
; k = 1; : : : ; n
dt @ q_k
@qk
(4.1)
dove L = T + U μe la funzione Lagrangiana. Cio¶e le soluzioni
qk = qk (t), k = 1; : : : ; n, di tali equazioni soddisfacenti ad assegnate condizioni iniziali sono le equazioni del moto del sistema, e viceversa. Le con¯gurazioni di equilibrio sono le soluzioni
stazionarie qk (t) ´ qk? del sistema (4.1), dove i valori qk? sono le
soluzioni del sistema
@U
= 0; k = 1; : : : ; n:
@qk
In generale le equazioni (4.1) costituiscono un sistema di n equazioni
di®erenziali del II ordine non integrabile; con il metodo delle piccole oscillazioni si propone un approccio che, mediante un'approssimazione, vuole determinare le caratteristiche principali del
moto prossimo ad una soluzione stazionaria qk (t) ´ qk? corrispondente ad una con¯gurazione C ? ´ q? = (q1?; : : : ; qn? ) di equilibrio
stabile. Premettiamo il seguente risultato:
Teorema di Dirichlet: Sia dato un sistema meccanico a vincoli perfetti, bilateri, olonomi e scleronomi e soggetto ad un sis-
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
104
4 Piccole oscillazioni
tema di forze conservative; sia C ? = q? un punto di minimo relativo in senso stretto per l'energia potenziale V = ¡U (supposta
regolare a su±cienza), cio¶e esiste un intorno I di q? tale che
8q = (q1 ; : : : ; qn ) 2 I; q 6= q?
) V (q) > V (q? ):
(4.2)
Sotto tali ipotesi si ha che
8² > 0 9± > 0 : jqk (t0 ) ¡ qk? j + jq_k (t0 )j · ±
(4.3)
allora il moto avviene in un intorno della con¯gurazione di equilibrio:
jqk (t) ¡ qk?j + jq_k (t)j · ² 8t ;
(4.4)
dove t0 μe l'istante iniziale e qk (t0 ) e q_k (t0) le condizioni inziali del
moto qk (t).
Ricordando che un punto di minimo relativo per l'energia
potenziale corrisponde ad una con¯gurazione di equilibrio stabile
allora il signi¯cato meccanico della (4.4) μe evidente: se inizialmente
prendiamo il sistema prossimo alla con¯gurazione di equilibrio stabile e con velocitμa su±cientemente piccole allora il moto del sistema a partire da tali con¯gurazione iniziale rimane prossimo inde¯nitamente alla con¯gurazione di equilibrio stabile e con velocitμa
che si mantegono piccole.
Una condizione su±ciente a±nch¶e l'ipotesi (4.2) sia soddisfatta
@V
μe che l'energia potenziale abbia tutte le derivate parziali @q
nulle
k
?
?
?
in q = (q1 ; : : : ; qn ) e che la matrice Hessiana di V calcolata in q?
sia de¯nita positiva (cio¶e abbia tutti gli n autovalori strettamente
maggiori di zero). La dimostrazione generale di questo teorema
si basa sul principio di conservazione dell'energia meccanica. Sia
E l'energia meccanica del sistema che, in virtμ
u delle condizioni iniziali e per continuitμa, μe prossima al valore dell'energia potenziale
in corrispondenza al punto di minimo relativo: E ¼ V (q?) per ±
su±cientemente piccolo. Se V ha un punto di minimo relativo
in q? allora V si puμo approssimare, almeno localmente, con un
paraboloide in n dimensioni avente vertice nella con¯gurazione di
equilibrio; se il sistema si allontana troppo dalla con¯gurazione di
equilibrio o se le velocitμa diventano grandi allora l'energia potenziale o l'energia cinetica aumentano e la somma T + V non puμo
mantenersi uguale a E.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
4.2 Moto delle piccole oscillazioni
105
Dimostrazione: Possiamo sempre assumere, senza perdere in
generalitμa, qk? = 0 e U (q? ) = 0. Poich¶e q? = (q1?; : : : ; qn? ) μe un
punto di massimo e®ettivo per U, cio¶e di minimo relativo e®ettivo
per V = ¡U, segue che esiste un ± > 0 tale che per ogni q =
(q1 ; : : : ; qn ) 6= (0; : : : ; 0) e tale che jqk j · ± allora V (qk ) > 0. Se
consideriamo poi l'espressione dell'energia totale
E(q1; : : : ; qn ; q_1 ; : : : ; qn ) = T + V
e se ricordiamo che T > 0 se almeno una delle q_h μe non nulla
allora segue che E(q1 ; : : : ; qn ; q_1; : : : ; qn ) > 0 se almeno una delle q_k
e qk μe non nulla (subordinatamente alla condizione jqk j · ±) e che
E(0; : : : ; 0) = 0. Cio¶e l'energia totale E(q1 ; : : : ; qn ; q_1 ; : : : ; qn ) ha
un minimo e®ettivo in M = (0; : : : ; 0) 2 R2n . Fissato 0 < ²0 < ±
su±cientemente piccolo e data la sfera B(M; ²0 ) nello spazio delle
fasu R2n avremo, per quanto detto,
E(q; q)
_ > 0 8(q; q)
_ 2 B(M; ²0 ) ¡ f(0; : : : ; 0)g
e inoltre, essendo @B un insieme compatto e E(q; q)
_ una funzione
continua, segue che esiste non nullo il minimo
E ? = m(²0) =
min
(q;q)2@B(M;²
_
0)
E(q; q)
_ > 0:
Inoltre, sempre per la continuitμa di E(q; q)
_ esisterμa 0 < ±0 < ²0
tale che
E ? > M (±0 ) =
max
(q;q)2B(M;±
_
0)
E(q; q)
_ > 0:
Quindi, se all'istante iniziale (q0 ; q_0 ) 2 B(M; ±0 ) allora E(q0 ; q_0) =
_
avviene sempre alE0 · M (±0 ) < E ? e quindi il moto (q(t); q(t))
l'interno della sfera B(M; ²0) perch¶e, dovendo conservarsi l'energia
meccanica totale, non potrμa mai aversi E(q; q)
_ ¸ E ? , condizione
che si veri¯ca quando il punto (q; q)
_ μe sul bordo di B(M; ²0 ).
4.2 Moto delle piccole oscillazioni
Nel seguito, per semplicitμa supporremo, senza perdere in generalitμa, che sia qk? = 0 (altrimenti operiamo la traslazione qk !
qk ¡ qk?). Ricordando che
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
106
4 Piccole oscillazioni
T = T2 + T1 + T0 ; dove T =
n
1 X
ai;k (q)q_i q_k
2 i;k=1
per sistemi scleronomi, scriviamo la funzione Lagrangiana mettendo in evidenza i termini di secondo grado nelle qk e q_k :
L = T + U = L~ + R; dove L~ = T~ + U~ :
Piμ
u precisamente poniamo
T =
n
1 X
ai;k (q)q_i q_k = T~ + RT ;
2 i;k=1
dove
n
1 X
~
T =
a~i;k q_i q_k ; ~ai;k = ai;k (0)
2 i;k=1
μe ottenuto calcolando lo sviluppo in serie di Taylor delle funzioni
ai;k attorno a q? = 0, e
U = U(0) +
n
X
@U(0)
k=1
@qk
qk +
n
1 X
@ 2 U(0)
qk qi + RU
2 i;k=1 @qk @qi
n
1 X
@ 2 U(0)
~
~
= U + RU ; U =
qk qi + RU
2 i;k=1 @qk @qi
μe ottenuto calcolando lo sviluppo in serie di Taylor della funzione
U attorno a q? = 0. Ricordiamo che, essendo l'energia potenziale sempre de¯nita a meno di una costante additiva, possiamo
assumere U (0) = 0 e che, essendo q? = 0 una con¯gurazione di
(0)
= 0. Il termine RT μe un resto di ordine 1 nelle
equilibrio, @U
@qk
qk e di ordine 2 nelle q_k , il termine RU μe un resto di ordine 3 nelle
qk ; complessivamente, il resto totale R = RT + RU μe di ordine 3
~ q;
_ q) = T~ (q)
_ + U~ (q) prende il nome
nelle qk e q_k . La funzione L(
di Lagrangiana ridotta.
De¯nizione: Si chiama moto delle piccole oscillazione del
sistema meccanico attorno alla con¯gurazione di equilibrio stabile
~
q? un qualunque moto associato alla Lagrangiana linearizzata L.
Si osserva immediatamente che il grande vantaggio di operare
con la Lagrangiana linearizzata, invece che con la Lagrangiana
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
4.3 Caso unidimensionale
107
iniziale, μe che le equazioni di Lagrange risultano essere lineari e a
coe±cienti costanti, e quindi risolubili con metodi elementari:
n
n
X
d @ T~
d X
d @ L~
=
=
T~i;k q_i =
T~i;k qÄi
dt @ q_k
dt @ q_k
dt i=1
i=1
e
n
~
X
@ L~
@U
~i;k qi
U
=
=
@qk
@qk
i=1
da cui le (4.1) per la Lagrangiana ridotta assumono la forma
desiderata:
n
X
i=1
T~i;k qÄi =
n
X
~i;k qi ; k = 1; : : : ; n:
U
(4.5)
i=1
Si osserva anche che la validitμa di questa approssimazione μe giusti¯cata dal Teorema di Dirichlet, il quale garantisce, a priori, che
qk (t) e q_k (t) rimangono piccole inde¯nitamente (ricordiamo che
abbiamo preso qk? = 0 per semplicitμa) e quindi il contributo del
resto R ¶e trascurabile.
4.3 Caso unidimensionale
Nel caso unidimensionale (n=1) allora, denotando con q l'unico
parametro lagrangiano e supponendo che q? sia una con¯gurazione
di equilibrio stabile tale che U 00 (q ?) < 0, si ha
1
T = a(q)q_2
2
e U = U(q)
da cui (non facciamo qui la posizione di comodo q? = 0)
1
~ = 1 U 00 (q? )(q ¡ q? )2 :
T~ = a(q ? )q_2 e U
2
2
Le (4.5) diventano semplicemente
a(q? )Ä
q = U 00 (q? )(q ¡ q? ) ) zÄ + ! 2 z = 0
00
?
)
dove si μe posto z = q ¡ q ? e ! 2 = ¡Ua(q(q
> 0; e questa si riconosce
?)
essere l'equazione dell'oscillatore armonico che ha soluzione generale data da
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
108
4 Piccole oscillazioni
z(t) = A cos(!t + ®) ) q(t) = q ? + A cos(!t + ®)
dove A e ® sono costanti che si determinano mediante le condizioni
iniziali. T = 2¼=! e ! rappresentano il periodo e la pulsazione
delle piccole oscillazioni. Riassumendo quanto detto possiamo concludere che:
Teorema: Per un sistema meccanico (a vincoli perfetti, olonomi,
bilateri, scleronomi e soggetto ad un sistema di forza conservative)
ad un grado di libertμa il periodo delle piccole oscillazioni attorno
ad una con¯gurazione di equilibrio stabile q ?, in cui si suppone sia
U 00 (q? ) < 0, μe dato da
v
u
u a(q ? )
2¼
= 2¼t¡ 00 ? :
T =
−
U (q )
4.4 Coordinate normali e frequenze proprie
Vediamo ora come determinare nella pratica l'integrale generale
del sistema (4.5) nel caso in cui esso derivi da una Lagrangiana
linearizzata L~ = T~ + U~ rispetto a un punto di equilibrio stabile
q? = 0: A tal ¯ne μe utile adottare la notazione matriciale:
1
~ = ¡ 1 qtBq;
T~ = q_ t Aq_ e U
2
2
³
2
(4.6)
´
dove le matrici A = (T~i;k ), B = ¡ @@qUi @q(0)k sono entrambe simmetriche ed A μe de¯nita positiva; la matrice B, nel caso in
cui (come supporremo) q? μe di equilibrio stabile, μe, in generale,
de¯nita positiva. A di®erenza delle notazioni adottate in precedenza qui μe piμ
u comodo denotare con q il vettore colonna di componenti qk e qt il suo trasposto, cio¶e qt μe il vettore riga con gli
stessi componenti. Con tale notazione la Lagrangiana linearizzata
si scrive
i
1h t
~ q)
_ =
L(q;
q_ Aq_ ¡ qt Bq
2
(4.7)
e le equazioni di Lagrange, lineari per costruzione, si scrivono in
modo sintetico come:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
4.4 Coordinate normali e frequenze proprie
AÄ
q + Bq = 0:
109
(4.8)
Come suggerisce la teoria dei sistemi di equazioni lineari ordinarie
a coe±cienti costanti, cerchiamo una soluzione della (4.8) della
forma
q = [C cos(!t + °)]w;
(4.9)
dove w μe un vettore (colonna) di Rn da determinarsi e ! 2 C
dipende dalle caratteristiche del sistema, C e ° sono costanti da
determinarsi in funzione delle condizioni iniziali. Sostituendo (4.9)
in (4.8) questa diventa
[C cos(!t + °)](¡! 2 A + B)w = 0
che risulta identicamente soddisfatta se ! e w sono tali che (B ¡
! 2A)w = 0; siamo quindi indotti a studiare il seguente problema
generalizzato agli autovalori
det(B ¡ ¸A) = 0:
(4.10)
Richiamiamo il seguente risultato dell'algebra lineare (che per
completezza dimostro):
Lemma: L'equazione (4.10) de¯nisce gli autovalori di B
rispetto ad A ed ammette esattamente n soluzioni ¸i , i =
1; : : : ; n, reali e positive.
Dimostrazione del Lemma: L'esistenza degli autovalori reali di
B rispetto ad A (con i corrispondenti autovettori w) si ottiene
sfruttando il fatto che la matrice A μe simmetrica e de¯nita positiva (μe una matrice cinetica) e che la matrice B μe simmetrica e
de¯nita positiva (μe la matrice Hessiana di U relativa ad un punto di
massimo relativo per U). Essendo la matrice A simmetrica e positiva, esiste un'unica matrice simmetrica e positiva il cui quadrato
μe uguale ad A e che pertanto puμo essere a buon diritto indicata con
1
A 2 (la radice quadrata di A). Infatti, poich¶e A μe simmetrica esiste
una matrice ortogonale M (cio¶e M t = M ¡1) che diagonalizza A:
0
MAM ¡1 = MAM t = ®;
1
®1 0 : : : 0
B
C
B 0 ®2 : : : 0 C
C (4.11)
dove ® = B
.
B
C
@ 0 0 .. 0 A
0 0 : : : ®n
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
110
4 Piccole oscillazioni
dove appunto ®1 ; ®2; : : : ; ®n sono gli autovalori di A. La positivitμa
di A assicura che gli autovalori ®1 ; ®2; : : : ; ®n sono tutti strettamente positivi, quindi possiamo de¯nire
0p
1
®1 0 : : : 0
B 0 p® : : : 0 C
B
C
1
1
1
2
¡1
C : (4.12)
A 2 = M ® 2 M; dove ® 2 = B
...
B
C
@ 0
0
0 A
p
0
0 : : : ®n
1
1
ed μe immediato veri¯care che (A 2 )2 = A e che A 2 μe simmetrica e
positiva. Infatti
1
1
1
1
1
1
1
(A 2 )2 = A 2 A 2 = M ¡1® 2 MM ¡1 ® 2 M = M ¡1 ® 2 ® 2 M
= M ¡1 ®M = A
e
1
³
1
(A 2 )t = M ¡1® 2 M
´t
1
³
1
= M t® 2 M
´t
1
= M t (® 2 )t (M t)t
1
= M t® 2 M = A 2
1
poich¶e ® 2 μe diagonale. In¯ne, dato un qualunque vettore q si ha
che
1
1
1
qt A 2 q = qt M t ® 2 Mq = (M q)t ® 2 (Mq)
1
da cui segue la positivitμa di A 2 come immediata conseguenza della
1
positivitμa di ® 2 . Mediante il cambiamento di variabili
1
1
y = A 2 q , q = [A 2 ]¡1 y
(4.13)
la (4.8) prende la forma
1
1
1
1
A2y
Ä + B[A 2 ]¡1y = 0 , y
Ä + [A 2 ]¡1B[A 2 ]¡1 y = 0 (4.14)
per cui la (4.10) equivale a
det [C ¡ ¸I] = 0:
1
(4.15)
1
dove si μe posto C = [A 2 ]¡1 B[A 2 ]¡1. Essendo C simmetrica e
de¯nita positiva (la veri¯ca di ciμo μe, sostanzialmente, analoga a
1
quell'e®ettuata per A 2 ) segue che i suoi autovalori ¸i sono reali e
positivi dimostrando cosμ³ il Lemma.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
4.5 Schema riassuntivo
111
In tal modo otteniamo l'esistenza di un sistema fondamentale
di soluzioni Qi (t)wi , dove Qi (t) = Ci cos(!i t + °i ), detti modi
normali, e la soluzione generale del sistema (4.5) μe data da una
loro combinazione lineare.
4.5 Schema riassuntivo
Per risolvere le equazioni di Lagrange linearizzate (4.8) intorno a
una con¯gurazione di equilibrio stabile q? (non poniamo ora la
condizione q? = 0), si risolve il problema agli autovalori
(B ¡ ¸A)w = 0
dove
A = (T~i;k ); T~i;k = Ti;k (q?);
Ã
!
@ 2U (q? )
e B= ¡
:
@qi @qk
Gli autovalori ¸i , i = 1; : : : ; n, di B rispetto ad A sono, nel caso di
con¯gurazioni di equilibrio
stabile, numeri reali positivi; le rispetp
tive radici !i = ¸i prendono il nome di pulsazioni proprie
o normali del sistema e 2¼=!i prendono il nome di frequenze
proprie o normali del sistema. Per avere gli n modi normali
si determinano gli autovettori wi , di componenti wki , k = 1; : : : ; n,
soluzioni di
(B ¡ ¸i A)wi = 0; i = 1; :::; n:
(4.16)
Allora, ad ogni pulsazione normale !i corrisponde una particolare oscillazione del sistema, detta oscillazione normale data da
Qi (t) = Ci cos(!i t ¡ °i ). La n-upla di coordinate originarie q(t)
risulta dal sovrapporsi di tutte le oscillazioni proprie:
q(t) = q? +
n
X
Ci cos(!i t + °i )wi ;
(4.17)
wki Ci cos(!i t + °i ); k = 1; : : : ; n:
(4.18)
i=1
cio¶e
qk (t) = qk? +
n
X
i=1
Le 2n costanti Ci e °i vengono determinate a partire dalle condizioni iniziali qk± e q_k±.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
112
4 Piccole oscillazioni
4.6 Esempi
4.6.1 Pendoli accoppiati: esempio di calcolo di modi normali e
battimenti
Due pendoli A e B di massa m e lunghezza `, in un campo di
gravitμa g, hanno i punti di sospensione PA e PB alla stessa quota;
la distanza tra PA e PB μe d. Una molla di costante elastica k 2 e
lunghezza a riposo d, collega le due masse. Come parametri lagrangiani assumiamo i due angoli μ1 e μ2 tra i pendoli e le rispettive
verticali. Studiamo i seguenti punti:
a)
b)
c)
d)
Trovare una con¯gurazione di equilibrio stabile;
Calcolare le corrispondenti pulsazioni proprie;
Determinare i modi normali;
Nel caso k 2 << mg=`, evidenziare il fenomeno dei battimenti
ovvero del trasferimento d'energia.
a) Ponendo un sistema di riferimento avente origine in PA , con
l'asse y verticale ascendente e con il punto PB sull'asse x avremo
le seguenti relazioni cinematiche:
(
xA = ` sin μ1
;
yA = ¡` cos μ1
(
xB = d + ` sin μ2
yB = ¡` cos μ2
da cui
B ¡ A = `(¡ sin μ1 + sin μ2 + d)^³ + `(¡ cos μ2 + cos μ1)^´:
Segue che l'energia potenziale del sistema μe:
1
V = mgyA + mgyB + k 2 (jA ¡ Bj ¡ d)2 = ¡mg`(cos μ1 + cos μ2) +
2
μ
¶2
1 2 q 2
d + 2d`(sin μ2 ¡ sin μ1 ) + 2`2 ¡ 2`2 cos(μ2 ¡ μ1) ¡ d :
+ k
2
Come ci si aspetta, la funzione V (μ1; μ2 ) ha un minimo relativo
nella con¯gurazione (0; 0) in corrispondenza al quale ha il valore
V (0; 0) = ¡2mg`.
b) L'approssimazione quadratica di V (μ1 ; μ2 ) in un intorno di
(0; 0) μe:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
4.6 Esempi
μ
¶
μ
113
¶
q
2
1
1
1
V~ = ¡mg` 1 ¡ μ12 + 1 ¡ μ22 + k 2
[d + `μ2 ¡ `μ1 ]2 ¡ d
2
2
2
1
1
= mg`2 (μ12 + μ22 ) + k 2 `2 (μ2 ¡ μ1 )2 + costante
2
2
i
1h 2
= μ1 (mg` + k 2 `2 ) + μ22 (mg` + k 2 `2 ) ¡ 2k 2 `2μ1 μ2 + costante:
2
D'altra parte l'energia cinetica μe
1
T = m`2 (μ_12 + μ_22 ) ´ T~:
2
Quindi le matrici A e B sono:
2
A = m`
Ã
!
10
; B=
01
Ã
mg` + k 2`2 ¡k 2 `2
¡k 2`2 mg` + k 2 `2
!
:
L'equazione secolare det(B ¡ ¸A) = 0 assume la forma (mg` +
k 2`2 ¡ m`2 ¸ )2 ¡ k 4 `4 = 0. Da ciμo si ottengono gli autovalori e le
pulsazioni proprie:
¸1 = g=`; ¸2 = g=` + 2k 2=m ) !1 =
q
g=`; !2 =
q
g=` + 2k 2 =m:
c) Per avere i due modi normali determiniamo i due autovettori
wj ; j = 1; 2, tali che (B ¡ ¸A)w = 0: Avremo il sistema (per
semplicit¶a poniamo ` = m = g = 1)
(
(1 + k 2 ¡ ¸)w1 ¡ k 2 w2 = 0
:
¡k 2w 1 + (1 + k 2 ¡ ¸)w2 = 0
Sostituendo ¸1 = 1 avremo
2
1
2
2
k w ¡ k w = 0; cio¶e w1 =
à !
1
:
1
Sostituendo ¸2 = 1 + 2k 2 avremo
2
1
2
2
¡k w ¡ k w = 0; cio¶e w2 =
Ã
!
1
:
¡1
Allora nel primo modo normale si ha
Ã
μ1 (t)
μ2 (t)
!
=
à !
1
Q1(t) =
1
à !
1
C1 cos(!1 t + °1)
1
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
114
4 Piccole oscillazioni
ovvero
μ1 (t) = μ2(t) = C1 cos(!1 t + °1 )
cioμe i pendoli oscillano in fase (la molla non lavora). Nel secondo
modo normale:
Ã
μ1(t)
μ2(t)
!
=
Ã
!
1
Q2(t) =
¡1
Ã
!
1
C2 cos(!2 t + °2 )
¡1
ovvero
μ1(t) = ¡μ2 (t) = C2 cos(!2t + °2 )
cioμe i pendoli oscillano in opposizione di fase.
d) Supponiamo che per t = 0 sia (μ10 ; μ20 ) = (0; 0), μ_20 = 0,
e che ad uno dei due pendoli sia impressa una velocitμa μ_10 = v.
Proviamo che dopo qualche istante T il primo pendolo μ
e
quasi immobile e tutta l'energia passa al secondo. Dalle
relazioni precedenti i dati iniziali si traducono come:
v
Q1 (0) = 0; Q2 (0) = 0; Q_ 1 (0) = Q_ 2 (0) = p :
2
Ora, le posizioni iniziali implicano:
Q1(t) = c1 sin t; Q2 (t) = c2 sin !t
dove
!=
p
1 + 2k 2 » 1 + k 2 + O(k 4) per k 2 << 1
pv
2
e le velocitμa inziali comportano: c1 =
soluzione ha la forma
8
>
>
< μ1 =
>
>
:μ =
2
p1
2
³
pv
2
p1
2
³
pv
2
sin t +
sin t ¡
!
v
p
e c2 =
sin !t
2
v
p
! 2
v
p
.
! 2
Allora la
´
´ :
sin !t
Ora ! » 1 + k 2 e quindi ! ¡1 » 1 ¡ k 2 e quindi si ottiene
8
>
>
< μ1 ¼
>
>
:μ ¼
2
v
2
v
2
(sin t + sin !t) = v cos
³
!¡1
t
2
(sin t ¡ sin !t) = ¡v cos
³
´
sin
´
!+1
t
2
³
!+1
t
2
sin
³
´
´ :
!¡1
t
2
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
4.6 Esempi
115
2
con !¡1
» k2 e !+1
» 1. Quindi μ1 oscilla con pulsazione !+1
2
2
2
che μe dell'ordine di 1 e con ampiezza che varia lentamente secondo
la legge v cos(k 2 t=2). L'oscillazione del primo pendolo sarμa quasi
nulla dopo un tempo T = k¼2 , allorch¶e oscillerμa praticamente solo
il secondo pendolo. Dopo un tempo 2T oscillerμa praticamente
solo il primo pendolo, e cosμ³ via (battimenti, ovvero trasferimento
periodico dell'energia da un pendolo all'altro).
4.6.2 Bipendolo
Consideriamo il sistema meccanico costituito da due aste rigide
AB e BC di uguale massa m e lunghezza 2`, incernierate in B. Il
punto A μe ¯sso e il sistema oscilla in un piano verticale soggetto
alla sola forza peso. Andiamo a studiare le piccole oscillazioni di
questo sistema, usualmente denominato bipendolo, attorno alla
sua posizione di equilibrio stabile. Il sistema ha due gradi di libertμa
e possiamo assumere come parametri lagrangiani gli angoli μ1 e
μ2 che formano le due aste con il semiasse verticale discendente.
L'energia cinetica ed il potenziale, di cui tralasciamo il calcolo
dettagliato, sono date da
·
4
16 _2
1
μ1 + 4 cos(μ1 ¡ μ2)μ_1 μ_2 + μ_22
T = m`2
2
3
3
¸
e
U = mg`(3 cos μ1 + cos μ2):
μ immediato veri¯care che il sistema ammette le 4 con¯gurazioni
E
di equilibrio (0; 0); (0; ¼); (¼; 0) e (¼; ¼) in cui la sola (μ1 = 0; μ2 =
0) μe stabile. Seguendo l'analisi appena esposta scriviamo la Lagrangiana linearizzata dove
·
4
1
16 _2
T~ = m`2
μ1 + 4μ_1 μ_2 + μ_22
2
3
3
¸
e
~ = ¡ 1 mg`(3μ12 + μ22):
U
2
Introducendo le matrici A e B abbiamo che
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
116
4 Piccole oscillazioni
Ã
A=
16
m`2 2m`2
3
2m`2 34 m`2
!
; B=
Ã
!
3mg` 0
:
0
mg`
L'equazione che fornisce gli autovalori della matrice B rispetto alla
matrice A μe data da
0³
1
´
3mg` ¡ 16
m`2¸
(¡2m`2 ¸)
3
³
´ A = 0;
det @
(¡2m`2¸)
mg` ¡ 43 m`2¸
ossia
28 2 28 2
¸ ¡ ! ¸ + 3! 4 = 0; ! 2 = g=`
9
3
che ha soluzioni
¸1;2 = !
2
·
p ¸
3
(7 § 2 7)
14
da cui le due frequenze proprie sono dunque
!j =
v Ã
!
u
u
1
1
t
§ p ; j = 1; 2:
¸j = ! 3
q
2
7
Denotate con Q1 (t) e Q2 (t) le coordinate normali, le oscillazioni
proprie sono date da
Qj (t) = Cj cos(!j t + °j ); j = 1; 2
dove le costanti Cj e °j sono da determinarsi attraverso le condizioni iniziali. Volendo in¯ne tornare alle coordinate iniziali μ1 e
μ2 siano
w1 =
Ã
p
7+2 7
3
p
¡35 ¡ 16 7
!
e w2 =
Ã
p
7¡2 7
3
p
¡35 + 16 7
!
gli autovettori associati agli autovalori ¸1 e ¸2 . Allora si ottiene
p
p
7¡2 7
μ1 (t) = C1 7+23 7 cos(!
p1t + °1 ) + C2 3 cos(!2 t + °2 );p
μ2 (t) = C1 (¡35 ¡ 16 7) cos(!1 t + °1) + C2 (¡35 + 16 7) cos(!2 t + °2 ):
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
5
Equazioni canoniche di Hamilton
5.1 Forma hamiltoniana dei sistemi lagrangiani
Sia dato un sistema lagrangiano, cio¶e un sistema di n equazioni
di®erenziali del II ± ordine
d @L
@L
¡
= 0; h = 1; 2; : : : ; n;
(5.1)
dt @ q_h @qh
in n funzioni incognite q = q(t) della variabile indipendente t,
q = (q1 ; q2 ; : : : ; qn ); dove L = L(q;
_ q; t) = T ¡ V μe la funzione
Lagrangiana. Sostituiamo ora al sistema (5.1) un sistema di 2n
equazioni di®erenziali del I ± ordine avente come incognite le n
funzioni qh e n funzioni indipendenti ph , h = 1; : : : ; n. Il nuovo
sistema si ottiene sostituendo al sistema (5.1) la relazione che lega
le p; q; q_ e t attraverso la relazione implicita
ph =
@L
; h = 1; 2; : : : ; n:
@ q_h
(5.2)
Le ph si dicono variabili coniugate o anche momenti.
Quando la funzione Lagrangiana proviene da un problema di
moto di un sistema olonomo e a vincoli ideali (eventualmente
dipendenti dal tempo), soggetto a forze conservative , si ha
L = T + U; T = T2 + T1 + T0
con
n
n
X
1 X
T2 =
ah;k q_h q_k ; T1 =
ah q_h ;
2 h;k=1
h=1
(5.3)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
118
5 Equazioni canoniche di Hamilton
mentre T0 e il potenziale U , al pari dei coe±cienti ah;k ; ah ; dipendono soltanto dalle q ed, eventualmente, dal tempo t. La (5.2)
assume la forma
ph =
n
X
ah;k q_k + ah ; h = 1; 2; : : : ; n;
(5.4)
k=1
_ diventa
che, risolta rispetto alle q,
q_h = uh =
n
X
k=1
ah;k (pk ¡ ak ); h = 1; 2; : : : ; n:
(5.5)
dove ah;k indica il generico elemento della inversa (ah;k ) della matrice (ah;k ). Le (5.2), da quanto visto, forniscono n equazioni risolubili rispetto alle q_ sotto la forma
q_h = uh (p; q; t); h = 1; 2; : : : ; n;
(5.6)
mentre d'altra parte, le (5.1), in base alle (5.2) e alle loro equivalenti (5.6), danno le
p_h =
Ã
@L
@qh
!
; h = 1; 2; : : : ; n;
(5.7)
q=u(p;q;t)
_
con che le derivate delle nuove incognite p risultano espresse in
termini delle p, q e t. Si perviene cosμ³ al sistema normale del
primo ordine nelle 2n funzioni incognite p, q, costituito dalle (5.7)
e (5.6).
In particolare si ha che i secondi termini delle (5.6) e (5.7) si
possono esprimere nel seguente modo:
(
@H
p_h = ¡ @q
h
; h = 1; 2; : : : ; n;
@H
q_h = @p
h
(5.8)
dove
H=
n
X
@L
h=1
@ q_h
q_h ¡ L
(5.9)
va qui considerata espressa in termini delle p; q; t tramite le (5.2)
e (5.6):
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
5.1 Forma hamiltoniana dei sistemi lagrangiani
H(p; q; t) =
n
X
h=1
_ q; t);
ph q_h ¡ L(q;
119
(5.10)
interpretandovi le q_ come simboli delle corrispondenti funzioni di
p; q; t fornite dalle (5.6).
Ogni sistema del primo ordine che soddisfa alle (5.8), qualunque
sia la funzione H(p; q; t), si dice canonico o Hamiltoniano e le
p e q si chiamano variabili canoniche. Nello studio dei sistemi canonici si interpretano le 2n variabili canoniche p; q come
coordinate cartesiane ortogonali in uno spazio lineare a 2n dimensioni chiamato spazio delle fasi. In questo spazio ogni soluzione
p = p(t); q = q(t) del sistema canonico μe rappresentata da una
curva (integrale), che spesso, considerando la t come misura del
tempo, si chiama pur essa traiettoria.
Per dimostrare le (5.8) consideriamo le p, q e t come variabili
indipendenti e le q_ come espresse in funzione di esse dalle (5.6);
e®ettuando il di®erenziale di H rispetto alle sole variabili p e q,
cio¶e immaginando di tenere ¯ssa la t, si ha che
±H =
"
n
X
@H
h=1
#
@H
±ph +
±qh :
@ph
@qh
D'altra parte, in base alle (5.10) questa variazione si puμo scrivere
±H =
n
X
"
h=1
Ã
!
#
@L
@L
q_h ±ph ¡
±qh + ph ¡
± q_h :
@qh
@ q_h
Confrontando queste due espressioni, ricordando le (5.2) e (5.7) e
in forza della arbitrarietμa di ±qh e ±ph si trova che devono essere
veri¯cate le (5.8).
Osserviamo anche che di®erenziando la (5.10) tenendo ora variabile t si ottengono le relazioni
dH =
"
n
X
@H
h=1
#
@H
@H
dph +
dqh +
dt
@ph
@qh
@t
e
dH =
n
X
h=1
"
Ã
!
#
@L
@L
@L
q_h dph ¡
dqh + ph ¡
dq_h ¡
dt
@qh
@ q_h
@t
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
120
5 Equazioni canoniche di Hamilton
che, oltre a dare nuovamente le equazioni canoniche, implicano la
relazione
@L
@H
=¡ :
@t
@t
(5.11)
5.2 Trasformata di Legendre
La trasformazione (5.9) che fa passare dalla funzione Lagrangiana
L alla funzione Hamiltoniana H μe un caso particolare di trasformazione piμ
u generale che prende il nome di trasformata di Legendre.
Consideriamo, inizialmente, il caso n = 1. Sia f (x) una funzione di classe C 2 (a; b), dove (a; b) μe eventualmente non limitato, e convessa, cio¶e tale che f 00 (x) > 0 per ogni x. L'equazione f 0 (x) = y, per y in un opportuno intervallo (c; d), ammette una unica soluzione x = x(y). Tale funzione x(y) ha una
interpretazione geometrica elementare: introduciamo la funzione
d(x; y) = xy ¡ f(x) che corrisponde alla distanza (con segno) tra
il punto sulla curva di ascissa x ed il punto sulla retta, passante
per l'origine e con coe±ciente angolare y; il punto x(y) μe quello
che rende, localmente, massima tale distanza.
Per costruzione il gra¯co di f(x) μe tangente alla retta con coe±ciente angolare y in x(y).
De¯nizione. Si chiama trasformata di Legendre di f (x) la
funzione
g(y) = d[x(y); y] = x(y)y ¡ f [x(y)]:
Si prova ora che:
Teorema. La trasformata di Legendre μe involutiva; cioμe la
trasformata di Legendre di g μe la f.
Dimostrazione: per prima cosa dimostriamo che g 00 (y) > 0 per
ogni y 2 (c; d); infatti:
g 0(y) = x(y) + yx0 (y) ¡ f 0[x(y)]x0 (y) = x(y)
e quindi
g 00 (y) = x0 (y) = ff 00 [x(y)]g¡1 > 0:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
5.2 Trasformata di Legendre
121
Fig. 5.1. Interpretazione geometrica della trasformata di Legendre.
La trasformata di Legendre di g(y) sarμa de¯nita a partire dalla
soluzione della equazione g 0 (y) = x che, essendo g 0 (y) = x(y), ci
dice che y(x) altro non μe che l'inversa della funzione x(y). Premesso ciμo calcoliamo la trasformata di Legendre h(x) di g(y):
h(x) = xy(x) ¡ g[y(x)] = xy(x) ¡ [xy(x) ¡ f(x)] = f(x):
Le considerazioni precedenti si estendono al caso di una funzione f(x), x = (x1 ; : : : ; xn ) di classe C 2(Rn ) e tali che la forma
2f
quadratica associata alla matrice Hessiana @x@h @x
sia de¯nita posj
itiva (o negativa) in modo da invertire il sistema
@f
= yh
@xh
de¯nendo la funzione vettoriale y = y(x). Si de¯nisce la trasformata di Legendre di f (x) come
g(y) = y ¢ x ¡ f [x(y)]:
μ immediato veri¯care che se la funzione f dipende anche da
E
m parametri ® = (®1 ; : : : ; ®m ):
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
122
5 Equazioni canoniche di Hamilton
f = f (x; ®) = f(x1 ; : : : ; xn ; ®1 ; : : : ; ®m )
allora sarμa y = y(x; ®) e x = x(y; ®), inoltre anche g dipende
dagli stessi parametri e
¯
¯
@f ¯¯
@g ¯¯
¯
¯
=
¡
; h = 1; : : : ; m:
@®h ¯y=y(x)
@®h ¯x=x
(5.12)
Infatti si avrμa che x = x(y; ®) e quindi g(y; ®) = x(y; ®)y ¡
f[x(y; ®); ®] da cui
¯
"
#
n
X
@xj
@g ¯¯
@f @xj
@f
@f
¯
=
yj ¡
¡
=¡
:
¯
@®h y=y(x) j=1 @®h
@xj @®h
@®h
@®h
Il passaggio tra la Lagrangiana e la Hamiltoniana si ottiene
e®ettuando la trasformata di Legendre della Lagrangiana sulle solo
variabili cinetiche q_h e lasciando invariate le altre qh . Infatti basta
porre x = q_ e y = p e prendere come parametri ®0 = t e ®h =
qh , inoltre f (x; ®) = L(q;
_ q; t). La trasformazione x = x(y) μe
implicitamente de¯nita dalla relazione
yh =
@f
@L
; ovvero ph =
@xh
@ q_h
e la trasformazione di Legendre sarμa de¯nita come
H=
n
X
h=1
q_h (p; q; t)ph ¡ L[q(p;
_
q; t); q; t]:
@H
@L
= ¡ @q
e
Se applichiamo poi la relazione (5.12) allora segue @q
h
h
@H
@L
@L
= ¡ @t . Da questa relazione, e tenendo conto che p_h = @qh
@t
@H
dalle equazioni di Lagrange, segue p_h = ¡ @q
. La relazione q_h =
h
@H
vale poich¶e la trasformata di Legendre μe involutiva. In questo
@ph
modo si sono ritrovate le equazioni canoniche di Hamilton.
5.3 Funzione Hamiltoniana nel caso dinamico
Per il Teorema di Eulero applicato alla (5.3) sussiste l'identitμa
n
X
@L
h=1
@ q_h
q_h =
n
X
@T2
h=1
@ q_h
q_h +
n
X
@T1
h=1
@ q_h
q_h = 2T2 + T1 = T + T2 ¡ T0 ;
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
5.4 Esempi di funzione Hamiltoniana
123
e quindi la (5.10) assume la forma
H = (T2) ¡ T0 ¡ U;
dove
(T2 ) =
n
1 X
ah;k (pk ¡ ak )(ph ¡ ah )
2 h;k=1
(5.13)
(5.14)
denota la funzione delle p; q; t che dalla T2 si deduce sostituendovi
al posto delle q_ le loro espressioni (5.5).
Se, in particolare, i vincoli non dipendono dal tempo allora
l'energia cinetica si riduce alla sua parte quadratica T2 e si ha piμ
u
semplicemente
H = (T ) ¡ U;
(5.15)
cio¶e la funzione Hamiltoniana non μe altro che l'energia meccanica
totale del sistema (espressa nelle coordinate p e q). In particolare
si ha che
n
1 X
ah;k pk ph :
(5.16)
(T ) =
2 h;k=1
Se poi T nelle q_ μe di forma diagonale
T =
n
1X
ah;h q_h2 ;
2 h=1
tutto si riduce, oltre che alla sostituzione delle variabili, al cambiamento di ciascun coe±ciente ah;h nel suo reciproco 1=ah;h :
(T ) =
n
1X
1 2
ph :
h;h
2 h=1 a
Quando i vincoli non dipendono dal tempo, sostituendo la
(5.16) nella (5.15) si riconosce che la funzione Hamiltoniana μe una
funzione quadratica nelle p de¯nita positiva, omogenea e a coe±cienti dipendenti dalle q.
5.4 Esempi di funzione Hamiltoniana
5.4.1 Punto libero
1) Punto libero di massa m riferito ad un sistema di coordinate
cartesiane (x; y; z). Abbiamo che
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
124
5 Equazioni canoniche di Hamilton
T =
´
1³ 2
mx_ + my_ 2 + mz_ 2 :
2
La corrispondente energia cinetica riferita nelle variabili coniugate, vale
1
(T ) =
2
Ã
!
p2x p2y p2z
+
+
:
m m m
2) Punto libero di massa m riferito ad un sistema di coordinate
polari sferiche (r; μ; '). Abbiamo che
´
1³ 2
mr_ + mr 2μ_2 + mr2 sin2 μ'_ 2 :
2
T =
La corrispondente energia cinetica riferita nelle variabili coniugate, vale
1
(T ) =
2
Ã
!
p2'
p2
p2r
+ μ2 +
:
m mr
mr2 sin2 μ
3) Punto libero di massa m riferito ad un sistema di coordinate
polari cilindriche (r; μ; z). Abbiamo che
T =
´
1³ 2
mr_ + mr2 μ_2 + mz_ 2 :
2
La corrispondente energia cinetica riferita nelle variabili coniugate, vale
1
(T ) =
2
Ã
!
p2z
p2r
p2μ
+
+
:
m mr2 m
5.4.2 Solido con punto ¯sso
Consideriamo un solido ¯ssato in un punto O e assumiamo come
parametri lagrangiani gli angoli di Eulero μ, ' e Ã. Con una
scelta opportuna del sistema di riferimento solidale con origine in
O l'energia cinetica ha la forma
T =
´
1³ 2
Ap + Bq2 + Cr2
2
dove si ricorda (??)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
5.5 Signi¯cato ¯sico dei momenti coniugati
125
8
_ _
_
_
>
< p = Ã sin μ sin ' + μ cos ' = ®3 Ã + μ cos '
>
:
q = Ã_ sin μ cos ' ¡ μ_ sin ' = ¯3Ã_ ¡ μ_ sin '
r = Ã_ cos μ + '_
= °3 Ã_ + '_
essendo
8
>
< ®3 = sin μ sin '
¯ = sin μ cos '
3
>
: ° = cos μ
3
i coseni direttori dell'asse ¯sso (O; z) rispetto agli assi solidali. I
momenti coniugati valgono
8
pμ =
>
>
>
>
>
>
<
>
>
>
>
>
>
:
@T
@ μ_
= Ap cos ' ¡ Bq sin ';
p' =
@T
@ '_
= Cr;
pà =
@T
@ Ã_
= Ap®3 + Bq¯3 + Cr°3
:
Da tale relazione si trae
8
>
< Ap = pμ cos ' + ¾ sin '
Bq = ¡pμ sin ' + ¾ cos '
>
: Cr = p
'
dove ¾ =
pà ¡ p' cos μ
sin μ
e quindi
"
#
1 (pμ cos ' + ¾ sin ')2 (pμ sin ' ¡ ¾ cos ')2 p2'
(T ) =
+
+
:
2
A
B
C
5.5 Signi¯cato ¯sico dei momenti coniugati
Supponiamo che una coordinata qh sia ciclica, cio¶e L non dipende
esplicitamente da qh . In questo caso il momento coniugato ph =
@L
si conserva poich¶e
@ q_h
p_h =
d @L
@L
=
=0
dt @ q_h
@qh
e esse assumono, sotto alcune circostanze, un signi¯cato ¯sico
notevole.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
126
5 Equazioni canoniche di Hamilton
5.5.1 Signi¯cato ¯sico della costante del moto ph quando la
e una coordinata cartesiana
coordinata ciclica qh μ
Consideriamo la Hamiltoniana nel caso dinamico. Si prova il
seguente risultato:
Teorema. Se qh μe tale che una sua variazione rappresenti
una traslazione rigida del sistema meccanico in una data
direzione ^a allora ph μe proporzionale alla componente della
quantitμ
a di moto lungo la direzione ^a:
ph = c
N
X
s=1
ms vs ¢ ^a;
(5.17)
dove c μe un fattore moltiplicativo.
Dimostrazione: Per ipotesi ogni variazione di qh causa una
traslazione rigida di ogni punto Ps lungo la direzione a^, cio¶e si
s
ha: @P
= c^a, s = 1; : : : ; N, dove c μe indipendente da s poich¶e si
@qh
tratta di una traslazione rigida. Usiamo ciμo per trovare il signi¯cato di ph :
ph =
N
X
@T
@vs
=
ms v s ¢
@ q_h s=1
@ q_h
(5.18)
dove
"
#
n
@vs
@ X
@Ps
@Ps
@Ps
=
q_i +
=
= c^a
@ q_h
@ q_h i=1 @qi
@t
@qh
(5.19)
che sostituita nella precedente ci permette di ottenere la (5.17);
ovvero ph μe proporzionale alla componente della quantitμa di moto
lungo la direzione di traslazione.
Se il sistema meccanico μ
e invariante per traslazioni in
una certa direzione, cio¶e la Lagrangiana (o, in modo equivalente, la Hamiltoniana) resta immutata dopo aver traslato tutti i
punti materiali in tale direzione come se fossero un corpo rigido,
allora si conserva la componente della quantitμ
a di moto
totale in tale direzione. Infatti, se il sistema meccanico μe invariante per traslazioni in una direzione ^a, le coordinate si possono scegliere in modo tale che sia ciclica una di esse, qh , quella
di traslazione nella direzione a^: Allora si conserva il momento coniugato ph e quindi la quantitμa di moto lungo a^: Ad esempio: sia
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
5.5 Signi¯cato ¯sico dei momenti coniugati
127
L = m2 (x_ 2 + y_ 2)+U(x) invariante per traslazioni (dell'unico punto)
parallele all'asse y, quindi my_ = costante.
5.5.2 Signi¯cato ¯sico della costante del moto ph quando la
e un angolo
coordinata ciclica qh μ
si prova il seguente risultato:
Teorema. Se qh μe tale che una sua variazione rappresenti una
rotazione rigida del sistema meccanico attorno ad un dato
asse (O; a^) allora ph μe proporzionale alla componente del momento della quantitμ
a di moto lungo la direzione ^a:
ph = cK(O) ¢ ^a = c^a ¢
N
X
s=1
ms vs £ (O ¡ Ps );
dove c μe un fattore moltiplicativo.
Dimostrazione: Per ipotesi la variazione di qh causa una rotazione rigida di ogni punto Ps attorno a un asse (O; ^a). Quindi,
s
dalla cinematica rigida: @P
= c^a £ (Ps ¡ O), s = 1; : : : ; N , per
@qh
una opportuna costante c indipendente da Ps , da cui segue
@Ps
@vs
=
= c^a £ (Ps ¡ O) :
@ q_h
@qh
Sostituendo tale relazione nella (5.19) otteniamo
ph = c
N
X
s=1
ms vs ¢ ^a £ (Ps ¡ O) = c
N
X
s=1
ms vs £ (O ¡ Ps ) ¢ ^a:
Da questo teorema segue che se il sistema meccanico μ
e invariante per rotazioni rigide intorno a un certo asse, allora
si conserva la componente del momento angolare totale
rispetto a quell'asse. Ad esempio: nel moto per inerzia di un
corpo rigido con punto ¯sso O, si conserva il momento angolare rispetto a un qualunque asse. Infatti, facendo uso degli
angoli di Eulero
^ + '_ k^0
! = Ã_ k^ + μ_N
si hanno le componenti della velocitμa angolare rispetto ad assi
solidali
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
128
5 Equazioni canoniche di Hamilton
8
_
_
>
< p = Ã sin μ sin ' + μ cos '
>
:
q = Ã_ sin μ cos ' ¡ μ_ sin '
r = Ã_ cos μ + ':
_
(5.20)
Nel moto per inerzia L = T = 12 (Ap2 + Bq 2 + Cr 2) μe indipendente
da à e quindi invariante per rotazioni intorno all'asse (O; z) poich¶e
l'angolo à individua le rotazioni rigide attorno a tale asse. Dunque
si conserva il momento angolare rispetto all'asse z. Per l'assenza
di forze esterne in realtμa z si puμo scegliere a piacere, dunque si
conserva il momento angolare.
5.6 Flusso Hamiltoniano e teorema di Liouville
5.6.1 Flusso Hamiltoniano
Sarμa utile nel seguito introdurre una notazione vettoriale per le
equazioni canoniche di Hamilton (5.8). Sia
x=
Ã
p
q
!
e J=
Ã
On ¡In
In On
!
dove In e On sono, rispettivamente, la matrice identitμa e la matrice
nulla di ordine n; nella notazione matriciale conviene assumere p
e q come vettori colonna.
Nota bene: Con abuso di notazioneÃindichiamo
indi®erente!
p
, vettore colonna, a
mente x = (p; q), vettore riga, o x =
q
seconda delle circostanze.
Le equazioni canoniche di Hamilton assumono quindi la seguente
forma:
x_ = J grad H(p;q) = J
à @H !
@p
@H
@q
(5.21)
dove il gradiente μe e®ettuato facendo prima le derivate rispetto
alle p e poi alle q. L'operatore J grad (p;q) viene talvolta chiamato
gradiente simplettico.
Osserviamo che questa notazione suggerisce la seguente interpretazione:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
5.6 Flusso Hamiltoniano e teorema di Liouville
J grad
(p;q) H
=
Ã
¡ @H
@q
@H
@p
!
129
(5.22)
de¯nisce un campo vettoriale sullo spazio delle fasi e le (5.21)
sono le equazioni per le linee di °usso di tale campo. Questo campo
prende anche il nome di campo Hamiltoniano. Si dimostra che
tale campo vettoriale μe solenoidale:
Teorema. Se H ammette derivata continua ¯no al secondo
ordine nelle q e p allora
h
div J grad
(p;q) H
i
= 0:
Dimostrazione: La dimostrazione μe immediata, infatti
h
div J grad
(p;q) H
i
=
n
X
"
h=1
#
@2H
@ 2H
¡
=0
@ph @qh @qh @ph
in virtμ
u delle ipotesi e del Teorema di Schwartz sullo scambio dell'ordine di derivazione.
Vale inoltre la seguente proprietμa:
Teorema. Se H = H(p; q) μe indipendente dal tempo, il campo
Hamiltoniano (5.22) μe tangente ad ogni punto regolare della super¯cie di energia costante H(p; q) = E:
Dimostrazione: Infatti il gradiente di H μe sempre ortogonale al
gradiente simplettico di H:
grad
(p;q) H ¢ J grad
(p;q) H =
Da cui segue la tesi poich¶e grad
H(p; q) = costante.
n
X
@H @H
h=1
@qh @ph
(p;q) H
De¯nizione. Ad ogni punto x0 =
¡
@H @H
= 0:
@ph @qh
μe normale alla super¯cie
Ã
p0
q0
!
Ã
2 R2n dello spazio
!
p(t)
delle fasi si puμo associare il punto x(t) =
, ottenuto inteq(t)
grando le equazioni canoniche di Hamilton con la condizione iniziale x(0) = x0 , per ogni t appartenente ad un dato intervallo
(t1 ; t2 ) contenente t0 = 0 (e dipendente da x0 ). Questa trasformazione viene denotata
S t : R2n !
R2n
x0 7! x(t) = S t(x0 )
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
130
5 Equazioni canoniche di Hamilton
e prende il nome di °usso nello spazio delle fasi associato
alla Hamiltoniana H.
L'intervallo (t1 ; t2 ) sarμa il massimo intervallo di de¯nizione della
soluzione delle equazioni canoniche di Hamilton, in alcuni casi esso
coincide con l'intero asse reale e, per semplicitμa, pensiamo di essere
sempre in questo caso.
Si puμo dimostrare che se la funzione Hamiltoniana μ
e ine un gruppo ad un parametro
dipendente dal tempo allora S t μ
di trasformazioni dello spazio delle fasi su se stesso, in
particolare si ha che
³
´
h
i
S t ± S s (x0) = S t [S s (x0)] = S t+s (x0 ) = S s S t (x0 )
³
´
= S s ± S t (x0):
5.6.2 Flusso Hamiltoniano per l'oscillatore armonico
Sia n = 1, quindi lo spazio delle fasi μe il piano (p; q) 2 R2 , e
sia H = H(p; q) = 12 (p2 + ! 2q 2 ) la funzione Hamiltoniana per
l'oscillatore armonico. In ogni punto del piano delle fasi μe applicato
il campo Hamiltoniano
J grad
(p;q) H
=
Ã
@H
@p
¡ @H
@q
!
=
Ã
p
¡! 2 q
!
che μe il secondo membro delle equazioni canoniche:
(
p_ = ¡! 2 q
:
q_ = p:
(5.23)
Per ! = 1 la curva diÃlivello
H(p; q) = E μe un cerchio. Ebbene:
!
p
mentre grad (p;q) H =
μe ortogonale al cerchio, il campo Hamilq
Ã
!
¡q
toniano J grad H(p;q) =
μe tangente al cerchio, che μe e®ettip
vamente la traiettoria dell'oscillatore armonico nel piano delle fasi.
Se ! 6= 1; la curva di livello di H μe un'ellisse, alla quale risulta
tangente il campo J grad (p;q) H. Per calcolare il °usso dell'oscillatore armonico conviene derivare la prima delle (5.23) e sostituirvi
la seconda ottenendo qÄ = ¡! 2 q. Alla soluzione generale:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
5.6 Flusso Hamiltoniano e teorema di Liouville
131
Fig. 5.2. Gradiente e gradiente simplettico per l'oscillatore armonico.
(
q(t) = A cos(!t) + B sin(!t)
p(t) = ¡A! sin(!t) + B! cos(!t)
si impone (p(0); q(0)) = (p0 ; q0 ) e si ottiene il °usso di fase:
S
t
Ã
p0
q0
!
!
Ã
p(t)
q(t)
!
=
Ã
cos(!t)
! ¡1 sin(!t)
¡! sin(!t) cos(!t)
!Ã
!
p0
(5.24)
:
q0
Esso μe, per ogni t, una trasformazione lineare. Nel caso speciale
! = 1 μe una rotazione di angolo t intorno all'origine. Osserviamo
che la S t μe la mappa di evoluzione al tempo t. Non dipendendo
poi esplicitamente H dal tempo, allora anche il campo vettoriale
J grad (p;q) H dipende solo dal punto (p; q). Quindi S s , applicata
al punto S t (p0 ; q0), dμa risultato uguale a quello della mappa S t+s
applicata a (p0 ; q0 ):
5.6.3 Teorema di Liouville
Il °usso Hamiltoniano (5.24) per l'oscillatore armonico μe de¯nito
attraverso la trasformazione lineare associata alla matrice
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
132
5 Equazioni canoniche di Hamilton
Ã
cos(!t)
! ¡1 sin(!t)
¡! sin(!t) cos(!t)
!
Si osserva facilmente che questa matrice ha determinante 1, ciμo
signi¯ca che la trasformazione lineare del piano su s¶e stesso lascia
inalterate le misure dei volumi. Questa μe una notevole proprietμa
generale del °usso Hamiltoniano valida per ogni sistema. Infatti,
vale il seguente:
Teorema di Liouville: Il °usso Hamiltoniano nello spazio
delle fasi conserva i volumi.
Dimostrazione: Dobbiamo fare vedere che per ogni t l'immagine
−(t) = S t (−) di un qualsiasi dominio − ½ R2n di frontiera regolare
ha la stessa misura di −. A tal ¯ne introduciamo la funzione v(t) =
volume[−(t)] e consideriamo la funzione v(t).
_
La variazione di
volume nell'intervallo in¯nitesimo dt μe data, a meno di in¯nitesimi
di ordine superiore, da
dv =
Z
@−(t)
h
J grad
(p;q) H
i
n
d¾dt =
Z
h
div J grad
−(t)
i
(p;q) H dV dt
da cui segue
v_ =
Z
−(t)
h
i
h
div J grad
h
i
(p;q) H dV
i
^ essendo N
^ la normale
dove J grad (p;q) H = J grad (p;q) H ¢ N
n
esterna; pertanto v(t)
_
μe il °usso del campo uscente attraverso la
super¯cie @−(t). Da ciμo, dal teorema hdella divergenza
i e dal fatto
che la divergenza del campo vettoriale J grad (p;q) H μe nulla segue
v_ = 0.
Da questo Teorema si ha la seguente proprietμa: chiamando
punti singolari le soluzioni costanti della equazione
x_ = J grad
(p;q) H
allora si dimostra che hogni punto isingolare del sistema x_ =
J grad (p;q) H con div J grad (p;q) H = 0 non puμ
o essere asintoticamente stabile. Infatti se x0 fosse asintoticamente stabile
allora esisterebbe una sfera di centro x0 tale che le traiettorie in
essa originate tenderebbero asintoticamente a x0 ; il volume dell'immagine della sfera tenderebbe quindi a zero per t ! 1 contraddicendo il Teorema di Liouville.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
5.6 Flusso Hamiltoniano e teorema di Liouville
133
Fig. 5.3. Flusso Hamiltoniano e trasformazione del dominio −(t).
Osserviamo che il teorema di Liouville asicura la conservazione
dei volumi, non della forma. Infatti si possono presentare situazioni diverse che, per analogia, possono essere simili a quanto
succede quando misceliamo due liquidi diversi. Ad esempio, se
versiamo dell'olio in un bicchiere d'acqua e mescoliamo il composto (immaginiamo, per analogia, che l'operazione di mescolamento eequivalga alla trasformazione indotta dal °usso Hamiltoniano nel piano delle fasi) si ha che i due liquidi rimangono separati e quindi abbiamo sia la conservazione del volume dell'olio
(ovvia) che, sostanzialmente, della forma. Se invece misceliamo
due vernici di tinta diversa (ad esempio una tinta rossa su una
base bianca) e mescoliamo il composto abbiamo ancora la conservazione del volume delle due vernici, ma non della forma; infatti le
molecole della vernice rossa sono, approssimativamente, uniformemente distribuite all'interno della vernice bianca. Tornando alle
trasformazioni nello spazio delle fasi si denotano come ergodiche o
mixing le trasformazioni che soddisfano caratteristiche del secondo
tipo.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
134
5 Equazioni canoniche di Hamilton
5.7 Coordinate cicliche | formalismo Hamiltoniano
Una coordinata qh μe detta ciclica o ignorabile quando non ¯gura
nella Hamiltoniana. Ciμo equivale a non ¯gurare nella Lagrangiana,
come si vede dal fatto che:
@H
d
= ¡p_h = ¡
@qh
dt
Ã
@L
@ q_h
!
=¡
@L
:
@qh
(5.25)
Oppure, ricordando che
H=
n
X
j=1
pj q_j (p; q; t) ¡ L[q(p;
_
q; t); q; t]
si ha immediatamente che
n
n
@H X
@ q_j X
@L @ q_j
@L
@L
=
pj
¡
¡
=¡
:
@qh j=1 @qh j=1 @ q_j @qh @qh
@qh
In particolare si possono avere i risultati giμa noti nella meccanica
Lagrangiana nel caso di variabili cicliche; infatti se la funzione
_ q; t) di un sistema lagrangiano non dipende da una data qh ,
L(q;
altrettanto accade nelle (5.2) e nelle (5.6) (che derivano dalle (5.2)
_
risolvendole rispetto alle q).
Si ha il seguente risultato:
Teorema. Se vi μe una coordinata ciclica qh allora il momento
coniugato ph μe un integrale primo del moto; inoltre il problema si
riconduce a equazioni di Hamilton di un sistema ad n ¡ 1 gradi di
libertμa.
Dimostrazione: Supponiamo per semplicitμa h = 1, cio¶e sia H
@H
indipendente da q1 , quindi si ha @q
= 0, e risulta dalla corrispon1
dente equazione (5.8) che sussiste l'integrale
p1 = Cost: = ®:
(5.26)
Se ne consegue che la funzione Hamiltoniana H(p; q; t) dipenderμa
dalle 2(n¡1) variabili (p2 ; : : : ; pn ; q1 ; : : : ; qn ), da t (eventualmente)
e dal parametro ®. Le equazioni (5.8) si riducono ad un sistema di
2(n ¡ 1) equazioni e, una volta risolto questo, la residua equazione
q_1 = @H
puμo essere risolta per quadrature ottenendo
@®
q1 (t) = q1(t0 ) +
Z
t
t0
@H[p2 (t); : : : ; pn (t); q2(t); : : : ; qn (t); ®; t]
dt:
@®
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
5.8 Esercizi
135
Osserviamo che nel formalismo lagrangiano il fatto che q1 sia
ciclica non diminuisce il numero di gradi di libertμa: in generale la
Lagrangiana resta funzione della velocitμa generalizzata q_1 e restano
da risolvere n equazioni in n incognite (a meno di non introdurre
la Lagrangiana ridotta con che si riduce il sistema di un grado
di libertμa). Nel formalismo hamiltoniano, invece, la coordinata
ciclica μ
e davvero "ignorabile". Infatti:
q1 ciclica ) p1 (t) ´ ® ) H = H(p2 ; :::; pn ; q2; :::; qn ; ®; t):
Di fatto ora la Hamiltoniana descrive un sistema con n¡ 1 gradi di
libertμa: la coordinata ciclica μe tenuta in considerazione solo tramite
la costante ®, da determinare in base ai dati iniziali.
5.8 Esercizi
1) Sia data un'asta AB rigida omogenea, di lunghezza ` e massa
m, mobile nel piano (O; x; y), (O; y) verticale ascendente, e vincolata in A a scorrere senza attrito sull'asse (O; x). Sull'asta
agisce, oltre che alla forza peso, una forza costante (B; F = F^³),
F > 0. Assumendo come parametri lagrangiani la coordinata
ascissa di A e l'angolo che l'asta forma con l'asse orizzontale, si
domanda:
i) la funzione Lagrangiana;
ii) la funzione Hamiltoniana;
iii)le equazioni canoniche di Hamilton.
3) Consideriamo un oscillatore accoppiato costituito da due punti
materiali P1 e P2 di massa m, vincolati a scorrere lungo l'asse
x e collegati tra loro mediante 3 molle con la prima e ultima
molla avente estremi ¯ssati in due punti A e B distanti ` tra
loro:
A ¡ molla ¡ P1 ¡ molla ¡ P2 ¡ molla ¡ B:
Denotando con k la costante di elasticitμa delle due molle esterne
e con K quella della molla interna e assumendo quali parametri
lagrangiani le distanze tra A e P1 e tra P2 e B si domanda:
i) la funzione Lagrangiana;
ii) la funzione Hamiltoniana;
iii)le equazioni canoniche di Hamilton.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
6
Principio variazionale di Hamilton.
6.1 Premesse
Si μe giμa visto come tutte le leggi della Meccanica dei sistemi materiali a vincoli privi di attrito siano sostanzialmente sintetizzate
nel principio dei lavori virtuali o nella conseguente relazione
μ comunque possibile ottenere forsimbolica della Dinamica. E
mulazioni sostanzialmente equivalenti in modo diverso richiedendo
che le leggi della Meccanica soddis¯no a certe principi variazionali.
In questo capitolo studieremo il principio di minima azione di
Hamilton. In ogni caso supporremo che si tratti di sistemi materiali soggetti esclusivamente a vincoli bilaterali e privi di
attrito.
6.2 Principio variazionale di Hamilton
Consideriamo un arbitrario sistema olonomo con coordinate in_ q; t):
dipendenti q = (q1 ; q2 ; : : : ; qn ) e la funzione Lagrangiana L(q;
L'integrale
A=
Z
t2
t1
L[q(t);
_
q(t); t]dt
(6.1)
μe detto azione (nel senso di Hamilton) durante un intervallo di
tempo (t1 ; t2) pre¯ssato. L'azione A μe un funzionale che dipende
dalle funzioni q(t) = (q1 (t); q2(t); : : : ; qn (t)).
Se speci¯chiamo arbitrariamente le funzioni qh (t), h = 1; : : : ; n,
otteniamo un dato moto cinematicamente possibile (che μe un moto
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
138
6 Principio variazionale di Hamilton.
compatibile con i vincoli). Nello spazio delle con¯gurazioni q 2 Rn
consideriamo tutte queste possibili curve, o "traiettorie", passanti
per due determinati punti dello spazio q1 e q2 , ¯ssati i tempi
iniziale e ¯nale t1 e t2 . Diversamente i moti sono arbitrari. Questa
Fig. 6.1. Esempio di due "traiettorie" ammissibili, cio¶e tali che all'istante iniziale
e all'istante ¯nale sono in punti pre¯ssati.
classe di moti viene denominata M(t1 ;t2 ;q1 ;q2 ) ed μe de¯nita come
M(t1 ;t2 ;q1 ;q2 ) = fq 2 C 2([t1 ; t2]; Rn ) : q(t1 ) = q1 ; q(t2 ) = q2 g:
Quindi
A : M(t1 ;t2 ;q1 ;q2 ) ! R
ovvero il funzionale azione A ha M(t1 ;t2 ;q1 ;q2 ) come dominio e
dipende dalla legge q = q(t): A = A(q).
Nella impostazione classica si sono determinate le equazioni di
Lagrange come conseguenza delle leggi di Newton e del principio
μ tuttavia possibile fare derivare le equazioni
dei lavori virtuali. E
di Lagrange partendo dal seguente postulato:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
6.2 Principio variazionale di Hamilton
139
Postulato (principio variazionale di Hamilton): Sia dato
un sistema meccanico olonomo ad n gradi di libertμa con Lagrangiana L(q;
_ q; t): Ogni legge del moto q(t) nell'intervallo di
tempo [t1 ; t2 ] con prescritti valori agli estremi q(t1 ) = q1 =
(q11 ; : : : ; qn1 ) e q(t2 ) = q2 = (q12 ; : : : ; qn2 ) rende stazionaria
l'azione di Lagrangiana L:
A(q) :=
Z
t2
t1
_
L [q(t);
q(t); t] dt:
(6.2)
Quindi: fra tutte le traiettorie cinematicamente possibili durante [t1; t2 ] che il sistema potrebbe scegliere e che hanno gli stessi
valori agli estremi, viene selezionata quella che rende stazionaria
(ad es. minima) l'azione di Lagrangiana L.
Andiamo a precisare meglio questa osservazione: consideriamo
i moti variati sincroni
q(t; ®) = q(t) + ®´(t)
dove ® 2 R μe un parametro reale e ´ = (´1 ; : : : ; ´n ) 2 M(t1 ;t2 ;0;0) ,
cio¶e
´ 2 C 2([t1; t2 ]; Rn ) e ´(t1 ) = ´(t2) = 0
(6.3)
e si calcola su di essi il funzionale azione:
A[q(¢; ®)] =
Z
t2
t1
L[q(t;
_ ®); q(t; ®); t]dt:
Osserviamo che il nuovo termine che otteniamo dipende dal
numero reale ® e dalle funzioni q ed ´; se pensiamo che queste
funzioni sono ¯ssate allora abbiamo costruito una funzione
I :R!
R
® 7! I(®) = A[q(¢; ®)]
che dipende da q ed ´ intesi come parametri. In quanto funzione
dipendente da una variabile reale ne possiamo calcolare la derivata
ed il di®erenziale:
¯
dI ¯¯
¯
dI :=
d®
d® ¯®=0
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
140
6 Principio variazionale di Hamilton.
che sarμa dipendente da q e ´.
De¯nizione. Si dice che il funzionale A(q) μe stazionario per
una dato q se
dI = 0; 8´ 2 M(t1 ;t2 ;0;0) :
(6.4)
Il principio variazionale di Hamilton puμo quindi essere formulato nel seguente modo: q = q(t) μ
e la legge del moto se, e solo
se, q soddisfa alla (6.4).
In particolare se q risulta un minimo per il funzionale allora
il funzionale μe stazionario in q e quindi q μe la legge del moto.
6.3 Esempi
Questa postulato (come tutti i postilati) si basa su osservazioni
empiriche. Consideriamo alcuni esempi signi¯cativi per i quali si
osserva la validitμa del postulato.
6.3.1 Moto di un grave
Scegliamo il riferimento in modo che il moto naturale abbia
equazioni
1
x0(t) = vx t; y0 (t) = 0; z0 (t) = ¡ gt2 + vz t
2
avendo assegnata la velocitμa iniziale v = (vx ; 0; vz ). I moti variati
sincroni sono de¯niti da
1
x® (t) = vx t + ®´x (t); y® (t) = ®´y (t); z® (t) = ¡ gt2 + vz t + ®´z (t)
2
dove ´ = (´x ; ´y ; ´z ) 2 C 2([t1; t2]; R3 ) tale che ´(t1 ) = ´(t2) = 0
per assegnati t1 e t2 . l'azione Hamiltoniana μe data da
A=
Z
t2
t1
_ q; t)dt =
L(q;
Z
t2
t1
·
¸
1 2
mv ¡ mgz dt:
2
Determiniamo ora la di®erenza dell'azione tra due moti: quello
naturale e quello variato sincrono; μe immediato veri¯care che
risulta
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
6.3 Esempi
141
Z t2 h
i
1
I(®) ¡ I(0) = m®2
´_x2 + ´_y2 + ´_ z2 dt
2
t1
che dμa dI = 0 e che risulta positiva per ogni perturbazione non
nulla. Quindi, in questo esempio, i moti naturali risultano non
solo stazionari per l'azione ma rendono minima l'azione.
6.3.2 Oscillatore armonico
Scegliamo il riferimento in modo che il moto naturale abbia
equazioni
x0 (t) = a sin(!t) e y0 (t) = z0 (t) = 0
avendo assegnata la velocitμa iniziale v = (vx ; 0; 0) e avendo operato
una opportuna scelta dell'origine dei tempi, a μe una costante reale.
I moti variati sincroni sono de¯niti da
x® (t) = a sin !t + ®´x (t); y® (t) = ®´y (t); z® (t) = ®´z (t)
dove ´ = (´x ; ´y ; ´z ) 2 C 2 ([0; t0 ]; R3) tale che ´(0) = ´(t0) = 0 per
un assegnato t0. l'azione Hamiltoniana μe data da
A=
Z
t2
t1
i
1 Z t0 h 2
L(q;
_ q; t)dt = m
v ¡ ! 2(x2 + y2 + z 2 ) dt
2
0
dove L = 12 mv2 ¡ 12 m! 2 (x2 + y2 + z 2 ). Determiniamo ora la
di®erenza dell'azione tra due moti: quello naturale e quello variato
sincrono; μe immediato veri¯care che risulta
I(®) ¡ I(0) = I1 + I2
dove
Z t2 h
i
1
2
I1 = m®
(´_x2 + ´_y2 + ´_ z2 ) ¡ ! 2 (´x2 + ´y2 + ´z2 ) dt
2
t1
e
I2 = m®
Z
t2
t1
(x_ 0 ´_x ¡ ! 2 x0 ´x )dt
dove il secondo integrale si annulla essendo, per integrazione per
parti,
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
142
6 Principio variazionale di Hamilton.
I2 = m®
Z
t2
t1
(x_ 0 ´_x ¡ ! 2 x0´x )dt = ¡m®
Z
t2
t1
(Ä
x0 + ! 2 x0)´x dt = 0:
Si puμo quindi concludere che la variazione I(®) ¡ I(0) valutata
sul moto naturale μe di ordine 2 rispetto alla perturbazione, da cui
segue la stazionarietμa di A. Osserviamo in¯ne che, assumendo per
semplicitμa t1 = 0:
s
s
¯Z t
¯
p Zt
p Z
¯
¯
0
0
2
0
0
j´(t)j = ¯¯ ´(t
_ )dt ¯¯ · t
´_ (t )dt · t
0
0
t2
´_ 2(t)dt
0
da cui segue
Z t2 ³
´
1
2
I(®) ¡ I(0) = m®
´_ 2 ¡ ! 2 ´ 2 dt
2
0
μ
¶
1 2 2 Z t2 2
1
2
´_ (t)dt:
¸ m® 1 ¡ ! t2
2
2
0
Quindi
p l'azione Hamiltoniana risulta minima sul moto naturale se
t2 < 2=!; per t2 maggiori non μe necessariamente minima l'azione.
Ad esempio si consideri la variazione data da ´x = sin2(¼t=t2 ) e
´y = ´z = 0; per prima cosa si osservi che
Z t2 ³
´
1
2
I(®) ¡ I(0) = m®
´_ 2 ¡ ! 2 ´ 2 dt
2
0
Z t2 ³
´
1
2
Ä́ + ! 2 ´ ´dt
= ¡ m®
2
0
integrando per parti, sostituendo ora l'espressione di ´ si ottiene
1
I(®) ¡ I(0) = ¡ mC®2 ;
2
dove
!
μ ¶ Ã
μ ¶#
μ ¶
Z t2 " 2
2¼ 2
2¼
2 ¼t
2
2 ¼t
2 ¼t
C=
cos
+ ! ¡ 2 sin
sin
dt ;
t22
t2
t2
t2
t2
0
2
che risulta necessariamente negativa quando ! 2 ¡ 2¼
> 0, ovvero
t22
p
t2 > ¼= 2! ed in questo caso la variazione μe negativa.
6.4 Equazioni di Eulero
Teorema (equazioni di Eulero-Lagrange dedotte dal principio variazionale di Hamilton): Condizione necessaria e suf¯ciente a±nch¶e l'azione (6.2) di Lagrangiana L assuma un valore
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
6.4 Equazioni di Eulero
143
estremo q(t) μe che q(t) sia soluzione delle equazioni di EuleroLagrange
d
dt
Ã
@L
@ q_h
!
@L
= 0; h = 1; :::; n:
@qh
¡
(6.5)
Dimostrazione: Consideriamo i moti variati sincroni
q(t; ®) = q(t) + ®´(t) ; ¡1 · ® · 1 ;
tali che ´(t1 ) = ´(t2) = 0. Se q(t) μe estremale allora deve essere
¯
dI(®) ¯¯
¯
d®; 8´ 2 M(t1 ;t2 ;0;0)
0 = dI ´
d® ¯®=0
dove
I(®) =
Z
t2
t1
(6.6)
L[q(t;
_ ®); q(t; ®); t]dt:
Derivando questa relazione rispetto a ® e portando la derivata
sotto il segno di integrale (assumendo siano valide le condizioni di
regolaritμa per potere fare ciμo) si ottiene
¯
n
X
dI(®) ¯¯
¯
=
d® ¯®=0 h=1
Z
t2
t1
"
#
@L @qh
@L @ q_h
+
dt:
@qh @®
@ q_h @®
q_h
= ´_h , integrando per parti e ricordando che
Osservando che @@®
´h (t) si annulla agli estremi, segue che
Z
t2
"
#
@L @qh
@L @ q_h
+
dt =
@qh @®
@ q_h @®
t1
=
Z
t2
t1
=
Z
t2
t1
"
@L @qh
@L @qh
dt +
@qh @®
@ q_h @®
"
@L
d
¡
@qh dt
Ã
@L
@ q_h
!#
#t2
t1
¡
Z
t2
t1
@qh d
@® dt
Ã
!
@L
dt
@ q_h
´h (t)dt:
Da cui segue che
¯
"
n Z t2
X
dI(®) ¯¯
@L
d
¯
=
¡
¯
d® ®=0 h=1 t1 @qh dt
Ã
@L
@ q_h
!#
´h (t)dt:
(6.7)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
144
6 Principio variazionale di Hamilton.
Ora, dovendo essere valida la (6.6) ed essendo le funzioni ´h (t)
indipendenti, otteniamo n integrali uguali a 0 e, essendo ogni
´h (t) arbitraria, per il teorema di annullamento degli integrali (si
veda in Appendice A.2) si annulla identicamente ogni espressione
d
@L
¡
@qh dt
Ã
@L
@ q_h
!
= 0; 8t 2 [t1; t2 ]; h = 1; :::; n;
(6.8)
quando L sia calcolata in q(t). Si osservi che l'a®ermazione inversa
μe banale: se una q = q(t) soddisfa le equazioni di Eulero-Lagrange,
automaticamente la variazione del funzionale (6.7) μe nulla. Infatti basta percorrere a ritroso la stessa dimostrazione, ma senza
bisogno di applicare il teorema di annulamento degli integrali.
Dunque, nel caso dinamico, le equazioni di Lagrange si possono riguardare come equazioni di Eulero per il calcolo variazionale. Si noti che la proprietμ
a di curva di essere estremale di un funzionale non dipende dal sistema di coordinate.
Poich¶e dal principio di Hamilton derivano le equazioni di Lagrange in coordinate indipendenti (e viceversa), il principio di
Hamilton puμ
o essere posto a fondamento della dinamica
dei sistemi olonomi. Ad ogni modo c'μe una di®erenza fondamentale tra le equazioni di®erenziali del moto e i principi variazionali. Le prime, essendo equazioni di®erenziali, caratteriazzano
localmente il moto mentre il principo variazionale, essendo una relazione integrale, caratterizza l'intera traiettoria nel suo complesso.
6.5 Esercizi (risolti)
1. Moto di un mobile vincolato su una sfera in assenza di campo
di forze (moto inerziale su una sfera).
Soluzione: la Lagrangiana, in coordinate sferiche (dove r μe il
raggio della sfera), prende la forma
1
1
L = mv2 = mr2 (μ_2 + sin2 μ'_ 2):
2
2
Le equazioni di Lagrange sono
d @L @L
@L
¡
=0 e
= cost
_
dt @ μ
@μ
@ '_
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
6.5 Esercizi (risolti)
145
poich¶e ' μe una coordinata ciclica; esplicitando (e sempli¯cando
per mr2 ) si ottiene
μÄ ¡ sin μ cos μ'_ 2 = 0; sin2 μ'_ = sin2 μ0 '_ 0 = 0
dove abbiamo assunto '_ 0 = 0 (ipotesi sempre lecita poich¶e possiamo scegliere il sistema di riferimento in modo che la velocitμa
iniziale v0 sia diretta lungo un meridiano ' = costante). Quindi
segue dalla prima equazione μ_ = costante e v0 = costante, in particolare quindi la traiettoria equivale al moto uniforme lungo un arco
di circonferenza. Questo risultato si traduce nel dire che l'azione
ha un "punto" di stazionarietμa lungo gli archi di circonferenza.
Per discutere se questo "punto" di stazionarietμa corrisponde, o no,
ad un minimo denotiamo con A0 il moto lungo un dato arco °0 di
circonferenza e con A1 il moto lungo un arco °1 qualunque sulla
super¯cie sferica avremo
1 Z t1 2
A1 ¡ A0 = m
(v ¡ v02 )dt
2
t0
= mv0
¸ mv0
Z
t1
t0
t1
Z
t0
1 Z t1
(v ¡ v0 )dt + m
(v ¡ v0 )2dt
2
t0
(v ¡ v0 )dt = mv0 (`1 ¡ `0 )
μ immediato
dove `1 μe la lunghezza di °1 e `0 μe la lunghezza di °0 . E
osservare che la lunghezza dell'arco di circonferenza °0 μe minore
della lunghezza °1 di ogni altra curva sulla sfera congiungente due
stessi punti vicina (in un certo senso) a °0 ; per tale ragione A1 >
A0 , cio¶e il moto rende minimo il funzionale. Osserviamo che
ciμo μe valido solo quando `0 < ¼r. Se `0 > ¼r allora `0 non sarμa
sempre minore di `1 e il valore minimo dell'azione A sarμa ottenuto
su un arco ausiliario di circonferenza.
2. Trovare le curve t ! q(t) tali che q(0) = 0, q(¼=2) = 1 e
che rendono stazionario il funzionale di lagrangiana L(q;
_ q; t) =
2
2
q_ ¡ q .
Soluzione: consideriamo il seguente funzionale
A(q) =
Z
0
¼=2
h
i
q(t)
_ 2 ¡ q(t)2 dt:
de¯nito sul dominio M0;¼=2;0;1 dove
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
146
6 Principio variazionale di Hamilton.
n
o
Mt1 ;t2 ;x1 ;x2 = q 2 C 2 ([t1 ; t2 ]; R) : q(t1) = q1 e q(t2 ) = q2 :
L'equazione di Eulero-Lagrange assume la forma
d
[2q(t)]
_
= ¡2q(t);
dt
cio¶e qÄ + q = 0:
La soluzione generale μe quindi q(t) = c1 cos t + c2 sin t; i dati al
bordo determinano le costanti:
(
q(0) = 0
quindi c1 = 0
;
q(¼=2) = 1 quindi c2 = 1
pertanto q(t) = sin t:
3. Determinare le curve t ! q(t), q 2 M0;1;0;1 ; di stazionarietμa
per il funzionale di Lagrangiana L(q;
_ q; t) = q_2 + 12tq.
Soluzione: il funzionale risulta essere
A(q) =
Z
1
[q(t)
_ 2 + 12tq(t)]dt; q 2 M0;1;0;1:
0
L'equazione di Eulero-Lagrange ha la forma
d
[2q(t)]
_
= 12t;
dt
cio¶e qÄ ¡ 6t = 0:
La soluzione generale μe quindi q(t) = t3 + c1t + c2; i dati al bordo
determinano le costanti:
(
q(0) = 0 quindi c2 = 0
;
q(1) = 1 quindi c1 = 0
pertanto q(t) = t3:
4. Esempio di un problema che non ammette minimo.
Soluzione: non μe detto che esistano sempre soluzioni del problema variazionale assegnato, come nel seguente esempio: sia
A=
Z
t2
t1
q(t)2dt;
x 2 Mt1 ;t2 ;q1 ;q2 :
L'equazione di Eulero-Lagrange assume la seguente forma 2q(t) =
0. Quindi se q1 = q2 = 0 allora q(t) ´ 0 μe nel dominio Mt1 ;t2 ;q1 ;q2
e minimizza il funzionale. Se, invece, q1 6= 0 o q2 6= 0 allora il funzionale non si minimizza con funzioni di classe C 2([t1 ; t2]; R). Ciμo
μe evidente perch¶e si puμo scegliere una successione qn 2 Mt1 ;t2 ;q1 ;q2
tale che
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
6.5 Esercizi (risolti)
147
8
>
< q1 ;
t = t1
0; t1 < t < t2
>
:q ; t = t
2
2
lim qn (t) =
n!1
Allora,
inf
A(qn ) = 0;
n
ma il funzionale non ammette minimo perch¶e A(q) > 0, 8q 2
Mt1 ;t2 ;q1 ;q2 .
5. Lunghezza di una arco di curva nel piano.
Soluzione: sia data una curva ° nel piano R2 avente rappresentazione cartesiana x = x(t) (invece della notazione piμ
u usuale
y = y(x)) con t 2 [t1 ; t2 ] e congiungente i punti (t1 ; x1 ) e
(t2 ; x2 ), cio¶e tale che x(t) 2 Mt1 ;t2 ;x1 ;x2 . Determiniamo la curva
x 2 Mt1 ;t2 ;x1 ;x2 di lunghezza minima. Il funzionale da minimizzare (denotato ora L poich¶e ora indica la lunghezza di una curva)
μe quello che ad ogni curva t ! x(t) ne associa la lunghezza:
L(x) =
Z
t2
t1
q
1 + x(t)
_ 2 dt:
L'equazione di Eulero-Lagrange μe:
d
2x_
q
= 0 da cui
dt 2 1 + x(t)
_ 2
x_
q
1 + x(t)
_ 2
= costante
che ha come soluzione generale x(t) = c1 t + c2 . Quindi, nel piano,
le curve di lunghezza minima sono i segmenti di retta.
6. Super¯cie di rotazione di area minima.
Soluzione: avendo pre¯ssato i due estremi (t1 ; x1 ) e (t2; x2 ) con
t2 > t1 e x1 ; x2 > 0, determinare la curva t ! x(t) la cui rotazione
attorno all'asse delle ascisse t genera una super¯cie di area minima.
L'area della super¯cie di rotazione generata da t ! x(t), x 2
Mt1 ;t2 ;x1 ;x2 , μe
A(x) = 2¼
Z
t2
t1
q
x(t) 1 + x(t)
_ 2 dt:
(6.9)
p
Abbiamo quindi un funzionale di Lagrangiana L(x;
_ x) = x 1 + x_ 2.
L'equazione di Eulero-Lagrange associata μe
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
148
6 Principio variazionale di Hamilton.
d @L @L
¡
= 0:
dt @ x_
@x
Osserviamo che quando L μe indipendente da t l'equazione di
Eulero-Lagrange puμo essere scritta come
@2L
@2L
@L
x
Ä
+
x_ ¡
= 0;
2
@ x_
@ x@x
_
@x
ossia, moltiplicando per x_ ambo i membri (riconosciamo la funzione Hamiltoniana):
d
dt
Ã
!
@L
@L
x_ ¡ L = 0 cio¶e
x_ ¡ L = c1 ; 8t:
@ x_
@ x_
Nel nostro caso si ha:
c1 = p
p
xx_ 2
xx_ 2 ¡ x ¡ xx_ 2
2 =
p
¡
x
1
+
x
_
1 + x_ 2
1 + x_ 2
e quindi
p
x = c1 1 + x_ 2:
μ facile veri¯care che una soluzione generale di questa equazione
E
di®erenziale μe data da x(t) = c1 cosh[(t ¡ c2 )=c1 ] dove c1 e c2 sono
due costanti da determinare; questa μe una famiglia di catenarie,
la rotazione delle quali genera una super¯cie dette catenoidi. Le
costanti sono determinate dalle condizioni:
(
c1 cosh[(t1 ¡ c2 )=c1 ] = x1
:
c2 cosh[(t2 ¡ c2 )=c1 ] = x2
A seconda dei valori di (x1 ; x2) si avranno 1, 2 o 0 soluzioni.
7. La Catenaria. Consideriamo il seguente problema: data una
catena pesante ¯ssata agli estremi e di lunghezza L assegnata, determinare la curva della catena.
Soluzione: supponiamo la catena omogenea e °essibile, in modo
che la curva abbia rappresentazione x ! y(x) regolare con la conμ immediato
dizione y(x1 ) = y1 e y(x2) = y2, cio¶e y 2 Mx1 ;x2 ;y1 ;y2 . E
osservare che la curva della catena sarμa tale da minimizzare il funzionale
y ! A(y) = altezza del baricentro;
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
6.5 Esercizi (risolti)
149
dove A(y) ha, a meno di una costante moltiplicativa, la seguente
espressione simile alla (6.9):
q
1 Z x2
y(x)½ 1 + y0 (x)2dx;
A(y) =
m x1
q
infatti 1 + y 0(x)2 dx rappresenta la lunghezza dell'elemento in¯nitesimo di curva, ½ = m
μe la densitμa costante e y(x) l'altezza di
L
tale elemento di catena. Poich¶e in questo caso A(y +c) = A(y) +c
dove c μe una costante allora la traiettoria μe de¯nita a meno di una
costante additiva e quindi la soluzione generale μe
y(x) = c + c1 cosh[(x ¡ c2 )=c1]
dove c, c1 e c2 si determinano imponendo le condizioni ai bordi e
¯ssando la lunghezza della corda:
L = c1 fsinh[(x2 ¡ c2 )=c1 ] ¡ sinh[(x1 ¡ c2 )=c1 ]g ;
x1 < x2 :
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
7
Trasformazioni canoniche
7.1 Struttura canonica delle equazioni di Hamilton
7.1.1 Trasformazioni che conservano la struttura canonica
Un cambio di coordinate X = X(x; t) trasforma un sistema di
_ = F (X; t)
equazioni di®erenziali x_ = f(x; t) in un altro sistema X
³ ´
in un modo che μe determinato dalla matrice jacobiana ª = @X
.
@x
Nel caso delle equazioni di Hamilton, con
x=
Ã
p
q
!
e campo
J grad
(p;q) H
=
Ã
¡ @H
@q
@H
@p
Ã
!
!
;
dove J =
Ã
Ã
0in ¡In
In 0in
!
!
p
P
una trasformazione x =
!X=
de¯nita dalla mappa
q
Q
X = X(x; t), con inversa x = x(X; t), produce un sistema corrispondente
X_ k =
2n
X
@Xk
h=1
2n
X
@Xk
@Xk
x_ h +
=
ªk;h x_ h +
@xh
@t
@t
h=1
(7.1)
ovvero
_ = ª J gradx H[x(X; t); t] + @X
X
@t
(7.2)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
152
7 Trasformazioni canoniche
³
´
che, in generale, non μe Hamiltoniano, dove ª = @X
μe la matrice
@x
Jacobiana della trasformazione X = X(x; t). Tra le trasformazioni
di coordinate possibili ne caratteriziamo quelle che conservano la
struttura canonica.
De¯nizione. Una trasformazione
Qh = Qh (p; q; t); Ph = Ph (p; q; t)
(7.3)
di®eomorfa (ovvero biunivoca e bidi®erenziabile), in qualche aperto,
delle variabili canoniche q = (q1 ; : : : ; qn ) e p = (p1; : : : ; pn ) conserva la struttura canonica delle equazioni di Hamilton
se, comunque scelta una funzione Hamiltoniana H(p; q; t) esiste una corrispondente funzione K(P; Q; t), detta nuova Hamiltoniana, tale che il sistema di equazioni di Hamilton per H
(
@H
p_h = ¡ @q
h
;
@H
q_h = @p
h
(7.4)
equivalga al sistema:
(
@K
P_ h = ¡ @Q
h
:
@K
Q_ h = @P
h
La de¯nizione individua quelle trasformazioni tali che il nuovo
campo μe Hamiltoniano, cioμe esiste una funzione K(X; t) tale che
ª J gradx H[x(X; t); t] +
@X
= J gradX K(X; t):
@t
(7.5)
Osserviamo che questa proprietμa μe intrenseca della trasformazione
x ! X e non deve dipendere invece dalla Hamiltoniana H che μe
arbitraria.
Quando X(x; t) conserva la struttura canonica delle equazioni e
dipende esplicitamente da t, @X
μe un campo Hamiltoniano relativo
@t
a una certa funzione K0 tale che:
@X
= J gradX K0 ;
@t
(7.6)
che dipende solo dalla trasformazione stessa e si puμo pensare come
la nuova Hamiltoniana corrispondente ad H ´ 0.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
7.1 Struttura canonica delle equazioni di Hamilton
153
7.1.2 Determinazione della nuova Hamiltoniana per e®etto di una
trasformazione che conserva la struttura canonica
Osserviamo che, anche quando X = X(x) μe una trasformazione
indipendente dal tempo che conserva la struttura canonica delle
equazioni canoniche di Hamilton, non μe detto che la nuova Hamiltoniana K(X; t) sia uguale alla H vista nelle nuove variabili:
H[x(X); t]. Vediamo il seguente esempio: sia n qualunque e sia
(p; q) ! (®p; ¯q) = (P; Q). A tal¯ne consideriamo si conserva
la struttura delle equazioni canoniche, ma con nuova Hamiltoniana K = ®¯H. Infatti si veri¯ca immediamente che K(P; Q) =
®¯H(®¡1 P; ¯ ¡1Q) μe tale che
8
<Q
_ = @K = ®¯ @H ®¡1
@P
@p
_ = ¡ @K = ¡®¯ @H ¯ ¡1
:P
@Q
@q
()
(
¯ q_ = ¯ @H
@p
®p_ = ¡® @H
@q
Cosμ³ in questo esempio esiste una costante c = ®¯ tale che K(X) =
cH[x(X)]. Si puμo provare che questa μe la situazione usuale in forza
del seguente Teorema:
Teorema. Sia X = X(x; t) un di®eomor¯smo che conserva
la struttura canonica delle equazioni di Hamilton. Allora
esiste un fattore c (dipendente al piμ
u da t) tale che la Hamiltoniana K corrispondente ad H μ
e data da
K(X; t) = cH[x(X; t); t] + K0 (X; t)
(7.7)
dove K0 μe la Hamiltoniana corrispondente ad H ´ 0, ossia tale
. In particolare K(X; t) = cH[x(X); t] se la
che J gradX K0 = @X
@t
trasformazione μe indipendente dal tempo. Il termine c μe tale che
³
´
¡ª J ª T J = ci:
(7.8)
dove ª = @X
μe la matrice Jacobiana della trasformazione.
@x
Dimostrazione: Se X(x; t) conserva la struttura canonica allora
la K(X; t) μe legata alla H tramite la (7.5). Una volta veri¯cata
che vale la (7.8) con c dipendente al piμ
u da t, veri¯chiamo che la
(7.7) soddisfa la (7.5); infatti
J gradX K = ciJ (ª T )¡1 gradx H[x(X; t); t] + J gradX K0 (X; t)
@X
= ciJ (ª T )¡1 gradx H[x(X; t); t] +
@t
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
154
7 Trasformazioni canoniche
e, dalla (7.5), deve essere
ciJ (ª T )¡1 = ª J; cio¶e ci = ¡ª J ª T J
poich¶e J J = ¡i. Rimane quindi da dimostrare la (7.8), a tal ¯ne
introduciamo il seguente Lemma:
Lemma: Sia A(x; t), (x; t) 2 R2n £ R, una funzione regolare
a valori nello spazio delle matrici quadrate reali 2n £ 2n. Se il
campo Agradx f μe irrotazionale, cio¶e il rotore di tale campo μe
nullo, per ogni funzione f : R2n ! R regolare allora esiste una
funzione c : R ! R tale che A = c(t)i.
Dimostrazione del Lemma: Se Agradx f μe irrotazionale allora
dovrμa essere
@(Agradx f )j
@(Agradx f )h
=
; 8h; j = 1; : : : ; 2n;
@xj
@xh
(7.9)
per ogni f. In particolare per f (x) = xj questa relazione implica
la seguente relazione sui coe±cienti della matrice A:
@Aj;j
@Ah;j
=
; 8h; j = 1; : : : ; 2n;
@xj
@xh
per f (x) = x2j si ottiene l'ulteriore relazione sui coe±cienti della
matrice A:
@Ah;j xj
@Aj;j xj
=
; 8h; j = 1; : : : ; 2n:
@xj
@xh
Da queste due relazioni segue necessariamente che deve essere
Ah;j = Aj;j ±jh , cio¶e la matrice A μe diagonale. Pertanto dovrμa
j;j
anche essere @A
= 0 se h 6= j e quindi potremo scrivere
@xh
Ah;j (x; t) = ch (xh ; t)±jh . Con questa posizione la (7.9) prende la
forma
ch
@2f
@2f
= cj
; h 6= j;
@xj @xh
@xh @xj
da cui segue (in virtμ
u del Teorema di Schwartz sull'invertibilitμa
delle derivate) che deve necessariamente essere
ch (xh ; t) ´ cj (xj ; t) ) ch (t) ´ cj (t) ´ c(t)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
7.2 Trasformazioni canoniche
155
da cui segue la dimostrazione del Lemma.
Siamo ora in grado di completare la dimostrazione del Teorema. Infatti sottraendo alla (7.5) quella corrispondente a H ´ 0
si ottiene la relazione
gradX (K ¡ K0) = ¡J ª J gradx H[x(X; t); t]
^
t)
= ¡J ª J ª T gradX H(X;
^
dove abbiamo posto H(X;
t) = H[x(X; t); t]. Per l'arbitrarietμa
di H e poich¶e il termine gradX (K ¡ K0 ) μe manifestamente irrotazionale allora il Lemma prova la (7.8).
Esempio: Nel caso della trasformazione canonica (p; q) !
(®p; ¯q) considerata in precedenza segue che
Ã=
e quindi
à @P
Ã
@P
@p @q
@Q @Q
@p @q
®0
¡ÃJÃ J = ¡
0¯
T
!Ã
!
0 ¡1
10
Ã
!Ã
Ã
!
0 ¡®
=¡
¯0
®¯ 0
=+
0 ®¯
=
Ã
®0
0¯
!Ã
0 ¡®
¯0
!
®0
0¯
!
!Ã
0 ¡1
10
!
= ®¯i
da cui si ottiene c = ®¯.
7.2 Trasformazioni canoniche
Il Teorema consente di circoscrivere l'interesse al caso c = 1; cioμe
di trattare le trasformazioni canoniche vere e proprie:
De¯nizione. Un di®eomor¯smo X = X(x; t) che conserva la
struttura canonica delle equazioni di Hamilton si dice trasformazione canonica se e solo se l'Hamiltoniana K corrispondente
a un arbitraria Hamiltoniana H si scrive
K(X; t) = H[x(X; t); t] + K0(X; t)
(7.10)
dove K0 μe tale che J gradX K0 = @X
: Una trasformazione canon@t
ica X = X(x) indipendente dal tempo si dice completamente
canonica.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
156
7 Trasformazioni canoniche
7.3 Generatrice di una trasformazione canonica
In una trasformazione canonica, tra le 4n variabili p; q; P; Q, solo
2n saranno indipendenti proprio a causa di (7.3). Una trasformazione canonica, che per ogni t agisce da un aperto di R2n ad
un aperto di R2n , μe quindi assegnata se sono assegnate 2n funzioni
μ conveniente disporre
(sotto alcune proprietμa) di 2n variabili. E
di una funzione generatrice della trasformazione canonica.
Ad esempio:
@ 2 F1
1. Se, per ogni t, una data funzione F1 (q; Q; t) ha det @Q@q
6=
2n
0 in un aperto di R , allora una trasformazione μe individuata
implicitamente dalle 2n equazioni
ph =
@F1
@F1
e Ph = ¡
; h = 1; 2; : : : ; n:
@qh
@Qh
(7.11)
2
@ F1
Infatti, risolvendo la prima rispetto alle Qh (essendo det @Q@q
6=
0) si ottiene Qh = Qh (pk ; qk ; t) che sostituete nelle seconde dμa
Ph = Ph (pk ; qk ; t). Nel caso particolare in cui F1(Q; q; t) sia lineare
nelle qh allora si trova Q = Q(p; t) e P = P(p; q; t). In questo
caso la trasformazione canonica μe detta libera; cio¶e le Q e q sono
indipendenti. Tra le funzioni del primo tipo (F1 μe funzione delle
vecchie e nuove coordinate)Pvi μe quella che scambia il ruolo tra
coordinate e impulsi: F1 = nh=1 qh Qh .
@ 2 F2
2. Se, per ogni t, una data funzione F2 (q; P; t) ha det @q@P
6=
2n
0 in un aperto di R , allora una trasformazione μe individuata
implicitamente dalle 2n equazioni
ph =
@F2
@F2
e Qh =
; h = 1; 2; : : : ; n:
@qh
@Ph
(7.12)
2
@ F2
Infatti, risolvendo la prima rispetto alle Ph (essendo det @P@q
6= 0)
si ottiene Ph = Ph (pk ; qk ; t) che sostituendo nelle seconde dμa
Qh = Qh (pk ; qk ; t). In questo rientra, come vedremo tra poco,
la trasformazione identitμa Q = q e P = p: l'identitμa μe necessariamente non libera perch¶e Q = q implica che Q e q non sono
indipendenti. Le funzioni generatrici del secondo tipo (dove F2
μe funzione delle vecchie coordinate e dei nuovi impulsi) comprendono la trasformazione identitμa; infatti, a partire da
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
7.3 Generatrice di una trasformazione canonica
F2 (q; P) =
n
X
157
qh Ph
h=1
segue che
ph =
@F2
@F2
= P h ; Qh =
= qh ; K = H:
@qh
@Ph
2
@ F3
6=
3. Se, per ogni t, una data funzione F3 (p; Q; t) ha det @p@Q
2n
0 in un aperto di R , allora una trasformazione μe individuata
implicitamente dalle 2n equazioni
qh = ¡
@F3
@F3
e Ph = ¡
; h = 1; 2; : : : ; n:
@ph
@Qh
(7.13)
2
@ F3
Infatti, risolvendo la prima rispetto alle Qh (essendo det @Q@p
6=
0) si ottiene Qh = Qh (pk ; qk ; t) che sostituendo nelle seconde dμa
Ph = Ph (pk ; qk ; t).
@ 2 F4
4. Se, per ogni t, una data funzione F4 (p; P; t) ha det @p@P
6=
2n
0 in un aperto di R , allora una trasformazione μe individuata
implicitamente dalle 2n equazioni
qh = ¡
@F4
@F4
e Qh =
; h = 1; 2; : : : ; n:
@ph
@Ph
(7.14)
2
@ F4
6= 0)
Infatti, risolvendo la prima rispetto alle Ph (essendo det @P
@p
si ottiene Ph = Ph (pk ; qk ; t) che sostituendo nelle seconde dμa Qh =
Qh (pk ; qk ; t).
Il numero di tipi di funzioni generatrici non si riduce a 4, ma μe
molto maggiore; tante quante sono le collezioni di n nuove coordinate Qi1 ; : : : ; Qik ; Pj1 ; : : : ; Pjn¡k , in modo tale che, con le vecchie
coordinate p; q si ottengano 2n coordinate indipendenti.
Queste quattro trasformazioni de¯nite implicitamente dalle relazioni (7.11)|(7.14) si dimostrano essere canoniche. A tal
¯ne μe stata fatta la scelta del segno negativo nelle (7.11) e (7.13).
Nel seguito, per semplicitμa, limitiamo la nostra analisi alle
trasformazioni con funzione generatrice del tipo F1 anche se il
risultato che segue, del quale ne omettiamo la dimostrazione, vale
per gli altri tipi di trasformazione.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
158
7 Trasformazioni canoniche
Teorema su funzioni generatrici di tipo F1 : Sia F1(q; Q; t)
una funzione regolare de¯nita in un aperto Aq £ BQ di R2n , 8t 2 R,
e tale che
Ã
@ 2 F1
det
@q@Q
!
6= 0; 8(q; Q) 2 Aq £ BQ ; 8t 2 R :
(7.15)
Allora F1(q; Q; t) μe la funzione generatrice di una trasformazione canonica. La trasformazione canonica si ottiene per esplicitazione dalle 2n equazioni
ph =
@F1
@F1
; Ph = ¡
@qh
@Qh
(7.16)
con nuova Hamiltoniana
K(P; Q; t) = H[p(P; Q; t); q(P; Q; t); t] +
@F1 [q(P; Q; t); Q; t]
:
@t
Osserviamo che se F1 μe indipendente da t allora la trasformazione μe completamente canonica. Osserviamo anche che la funzione generatrice F1 μ
e de¯nita a meno di un termine additivo
funzione di t (e per il resto arbitrario). Infatti, questo termine
non cambia la trasformazione generata da F1 .
7.4 Esempio: trasformazione canonica per l'oscillatore
armonico
Per l'oscillatore armonico uni-dimensionale, dove assumiamo la
massa unitaria, di Hamiltoniana
1
H(p; q) = [p2 + ! 2 q2 ]; p; q 2 R;
2
(7.17)
ecco una trasformazione canonica (p; q) ! (P; Q) che rende Q
ciclica. La trasformazione μe generata dalla funzione di primo tipo:
1
F1(q; Q) = !q 2 cot Q
2
da cui segue
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
7.4 Esempio: trasformazione canonica per l'oscillatore armonico
159
@F1
@F1
1 !q2
= !q cot Q; P = ¡
=
(7.18)
@q
@Q
2 sin2 Q
q
p
Ricavando q = 2P
sin Q e p = 2!P cos Q, troveremo H in
!
funzione di Q; P :
p=
K(P; Q) = H[p(P; Q); q(P; Q)] =
·
¸
2P
1
sin2 Q
2!P cos2 Q + ! 2
2
!
= !P:
Quindi Q μe coordinata ciclica. Le equazioni canoniche di Hamilton
nelle nuove coordinate prendono la forma:
@K
P_ = ¡
= 0 ) P = ® = cost:
@Q
e
@K
= ! ) Q = !t + ¯:
Q_ =
@P
Riportando alle coordinate originarie:
q(t) =
s
2®
sin(!t + ¯):
!
Le costanti di integrazione sono due e hanno il signi¯cato atteso: ®
determina l'ampiezza e ¯ la fase iniziale dell'oscillazione armonica.
Da questo esempio segue che μe molto utile trovare una trasformazione canonica che renda una o piμ
u coordinate cicliche. Quando
si riescono a rendere cicliche tutte le coordinate, esse sono spesso
interpretabili come variabili angolari. Quando H(p; q) ammette
una trasformazione canonica tale che i nuovi momenti risultano
costanti e le nuove coordinate risultano lineari rispetto al tempo
K =!¢P=
n
X
!h Ph ; Ph = ®h ; Qh = !h t + ¯h
h=1
allora, le variabili Ph si dicono azioni e le variabili Qh si dicono
angoli.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
8
Parentesi di Poisson
8.1 De¯nizione della parentesi di Poisson
De¯nizione. Una quantitμa osservabile μe una funzione g(p; q; t)
delle coordinate, dei momenti generalizzati ed eventualmente del
tempo (ad esempio l'energia, il momento angolare rispetto a un
asse, etc.). La parentesi di Poisson tra due osservabili f; g μe
de¯nita come:
ff; gg :=
n
X
h=1
Ã
!
@f @g
@f @g
¡
:
@ph @qh @qh @ph
(8.1)
8.1.1 Esempio
Consideriamo un punto materiale libero e, denotando con Kj e pj ,
j = 1; 2; 3, le componenti del suo momento della quantitμa di moto
(rispetto ad un dato polo coincidente con l'origine) e dei momenti
coniugati si osserva immediatamente che
fp1; K3g = p2 ; fp2 ; K3 g = ¡p1 ; fp3 ; K3 g = 0
e analogamente per K1 e K2. Infatti, ricordando che per un punto
libero pj = mq_j , da cui K3 = m(q1 q_2 ¡ q2 q_1) = q1p2 ¡ p1 q2 . Quindi
fp1 ; K3g =
n
X
j=1
Ã
@p1 @K3 @p1 @K3
¡
@pj @qj
@qj @pj
!
= p2 :
Inoltre si prova che
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
162
8 Parentesi di Poisson
fK1 ; K3 g =
=
n
X
j=1
Ã
n
X
j=1
Ã
@K1 @K3 @K1 @K3
¡
@pj @qj
@qj @pj
!
@(q2 p3 ¡ p2 q3 ) @(q1p2 ¡ p1 q2 ) @(q2p3 ¡ p2 q3 ) @(q1 p2 ¡ p1 q2)
¡
@pj
@qj
@qj
@pj
!
@(q2p3 ¡ p2 q3 ) @(q1 p2 ¡ p1 q2) @(q2 p3 ¡ p2q3 ) @(q1p2 ¡ p1 q2 )
¡
@p2
@q2
@q2
@p2
= q3 p1 ¡ p3q1 = K2
=
e analogamente si prova che
fK1 ; K2 g = ¡K3
e fK2; K3g = ¡K1 :
In¯ne segue che
fKj ; K 2 g = 0 dove K 2 = K12 + K22 + K23 :
8.2 Proprietμ
a principali
μ immediato osservare che la parentesi di Poisson μe una forma
E
bilineare antisimmetrica:
f¸1 f1 + ¸2 f2; gg = ¸1 ff1 ; gg + ¸2 ff2; gg;
ff; gg = ¡fg; f g;
ff; fg = 0:
(8.2)
(8.3)
(8.4)
Inoltre, si controlla facilmente che:
fqh ; qk g = 0; fph ; pk g = 0; fph ; qk g = ±hk
(8.5)
e, assegnata una funzione H = H(p; q; t),
fH; qh g =
@H
@H
; fH; ph g = ¡
;
@ph
@qh
quindi le equazioni di Hamilton, dove H rappresenta una funzione
Hamiltoniana, si scrivono in modo simmetrico:
(
p_h = fH; ph g
:
q_h = fH; qh g
Valgono, inoltre le seguenti ulteriori proprietμa:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
8.2 Proprietμ
a principali
163
1) Regola di Liebniz: ff1 f2 ; gg = f1 ff2 ; gg + f2ff1 ; gg;
2) Identitμa di Jacobi: ff; fg; hgg + fh; ff;
n ggg +ofg;nfh; f ggo= 0;
@ff1 ;f2 g
2
1
3) Vale la seguente relazione: @t = f1 ; @f
¡ f2 ; @f
.
@t
@t
La regola di Liebniz e la proprietμa 3) sono una conseguenza immediata della de¯nizione della parantesi di Poisson e dell'usuale
proprietμa relativa alla derivata del prodotto. Per dimostrare l'identitμa di Jacobi osserviamo che tale termine μe costituito da somme
di prodotti tra la derivata (parziale) seconda di un osservabile per
le derivate prime delle altre due e svolgiamo poi il calcolo esplicito
del termine
8
<
9
@g @h =
¡
=
ff; fg; hgg = f;
:
@qj @pj ;
j=1 @pj @qj
n
X
=
j;`=1
"
@f @
@q` @p`
n
X
@g @h
Ã
@g @h
@g @h
¡
@pj @qj @qj @pj
!
@f @
¡
@p` @q`
Ã
@g @h
@g @h
¡
@pj @qj @qj @pj
!#
:
Se consideriamo il termine che contiene le derivate seconde di g
esso μe dato da
n
X
"
j;`=1
@f @ 2g @h
@f @ 2 g @h
@f @ 2 g @h
@f @ 2g @h
¡
¡
+
@q` @qj @p` @pj @q` @pj @p` @qj @p` @q` @qj @pj @p` @q` @pj @qj
#
ed il termine che contiene le derivate seconde di h sarμa analogo mentre la funzione f compare esclusimante attraverso le sue
derivate prime. Le derivate seconde di g compaiono anche nell'altro termine fh; ff; ggg = ¡fh; fg; fgg che μe simile a quello
appena calcolato a meno del segno e dello scambio tra f e h, piμ
u
precisamente si ha che questo contributo μe dato da
¡
n
X
"
j;`=1
@h @ 2 g @f
@h @ 2g @f
@h @ 2 g @f
@h @ 2g @f
¡
¡
+
@q` @qj @p` @pj @q` @pj @p` @qj @p` @q` @qj @pj @p` @q` @pj @qj
#
cio¶e μe uguale ed opposto al termine precedentemente calcolato (in
virtμ
u del Teorema di Schwartz sullo scambio di derivate). Da
ciμo segue che il termine ff; fg; hgg + fh; ff; ggg + fg; fh; fgg non
contiene derivate seconde di g e, in modo analogo, di f e h e quindi
deve essere necessariamente nullo.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
164
8 Parentesi di Poisson
8.3 Applicazioni
Il seguente Teorema riguarda l'evoluzione temporale di una osservabile:
Teorema. La parentesi di Poisson tra l'Hamiltoniana H ed
un'osservabile arbitraria g = g(p; q; t) determina la variazione nel
tempo dell'osservabile quando essa μe calcolata sulle orbite p(t) e
q(t) generate da H. Piμ
u precisamente:
@g[p(t); q(t); t]
dg[p(t); q(t); t]
=
+ fH; gg:
dt
@t
(8.6)
Dimostrazione: Basta derivare rispetto a t su un'orbita t !
(p(t); q(t)):
n
n
X
@g
@g
dg @g X
=
+
q_h +
p_h
dt
@t h=1 @qh
h=1 @ph
Ã
n
@g X
@g @H
@g @H
=
+
¡
@t h=1 @qh @ph @ph @qh
!
=
@g
+ fH; gg:
@t
come immediato corollario segue che:
Corollario: Se g = g(p; q) allora g_ = fH; gg.
Segue inoltre che:
Teorema di Poisson: Se f1 e f2 sono due integrali primi allora
anche la loro parentesi di Poisson ff1 ; f2 g μe un integrale primo.
Dimostrazione: La dimostrazione del Teorema μe, di fatto, una
immediata conseguenza dell'identitμa di Jacobi. Infatti, essendo f1
e f2 integrali primi segue che durante il moto
df2
@f1
@f2
df1
=
+ fH; f1 g e 0 =
=
+ fH; f2 g: (8.7)
dt
@t
dt
@t
Si tratta ora di provare che
0=
dff1; f2 g
@ff1 ; f2 g
=
+ fH; ff1 ; f2 gg = 0
dt
@t
(8.8)
Ora, dall'identitμa di Jacobi, e dalla proprietμa 3) segue che la (8.8)
prende la forma
(
@f2
f1 ;
@t
)
(
@f1
¡ f2 ;
@t
)
+ ff1; fH; f2gg ¡ ff2 ; fH; f1 gg
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
8.3 Applicazioni
165
che μe nullo per le (8.7).
Osserviamo che, in generale, il nuovo integrale primo non μe
indipendente dai due primitivi, anzi puμo essere costante o nullo.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
9
Equazione di Hamilton-Jacobi
9.1 Equazione di Hamilton-Jacobi
Sappiamo che la risoluzione delle equazioni di Hamilton diventa
elementare se riusciamo, mediante una opportuna trasformazione
canonica, a rendere cicliche tutte le coordinate. Una situazione
speciale in cui ciμo avviene si ha quando la nuova Hamiltoniana a
seguito di una trasformazione canonica μ
e identicamente uguale
a zero. Quindi, se riusciamo a trovare una trasformazione canonica (dipendente dal tempo in generale) per e®etto della quale la
nuova Hamiltoniana si annulla (o μe una costante o, eventualmente, funzione della sola variabile t) allora abbiamo risolto il
problema della soluzione delle equazioni di Hamilton. Se
la trasformazione canonica μe, ad esempio, generata a partire da
una funzione generatrice (che nel seguito sarμa denotata con S invece che F2) del II ± tipo dipendente da P; q e t allora cerchiamo,
se esiste, una funzione S(P; q; t) tale che
fp; q; H(p; q; t)g !
(
)
@S
P; Q; K = H +
´0
@t
(9.1)
In tal caso nelle nuove coordinate le equazioni canoniche di Hamilton si risolvono banalmente:
P(t) ´ P0
e Q(t) ´ Q0:
Applicando la trasformazione inversa (P; Q) ! (p; q) si risolve il
problema originario. Tutto ciμo sembra molto semplice; in realtμa
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
168
9 Equazione di Hamilton-Jacobi
abbiamo spostato la di±coltμa nella determinazione della generatrice S che rende vera la (9.1).
Entrando in maggiore dettaglio e ricordando le prescrizioni di
una funzione generatrice di secondo tipo
(
ph =
Qh =
@S
@qh
@S
@Ph
; da cui q = q(P; Q; t);
la (9.1) si traduce nella seguente equazione
"
#
@S
@S
H
; q; t +
= 0:
@q
@t
(9.2)
Questa μe chiamata equazione di Hamilton-Jacobi: μe un'equazione di®erenziale alle derivate parziali del primo ordine (che
ammette tutta una propria trattazione matematica) nell'incognita
S. Osserviamo ancora che se una tale trasformazione esiste allora
le equazioni canoniche nelle nuove variabili si integrano
immediatamente e danno
Ph = Ph0 = ®h e Qh = Q0h = ¯h
costanti
poichμe
@K
@K
P_h = ¡
= 0 e Q_ h =
= 0:
@Qh
@Ph
Quindi la funzione S dipenderμa da S(®; q; t), cio¶e da n variabili qh
e da n parametri ®h piμ
u, eventualmente, il tempo.
De¯nizione. Se S = S(®; q; t) μe una funzione delle n + 1
variabili q1 ; : : : ; qn ; t e di n parametri (costanti) ®1; : : : ; ®n soddisfacente l'equazione (9.2) e alla condizione
Ã
@2S
det
@®h @qk
!
6= 0
allora S si dice una soluzione completa dell'equazione di
Hamilton-Jacobi La funzione S(®; q; t) μe detta funzione azione.
Essendo K(P; Q; t) ´ 0 allora segue che anche le nuove coordinate Qh , costanti poich¶e Q_ h = 0, sono legate alla S tramite
la:
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
9.2 Hamiltoniana indipendente da t ed azione ridotta
@S(®; q; t)
= Qh = ¯h :
@®h
³
2
169
(9.3)
´
S
6= 0 serve precisamente a garantire
La condizione det @®@h @q
k
che l'equazione (9.3) puμo essere risolta rispetto a q = q(®; ¯; t)
trovando q = q(t). Quindi: trovare una soluzione completa
S dell'equazione di Hamilton-Jacobi equivale a risolvere
il sistema delle equazioni di Hamilton.
Nell'equazione di Hamilton-Jacobi le variabili indipendenti sono
il tempo t e i parametri lagrangiani qh . Conseguentemente l'integrale completo di questa equazione dipenderμa da n + 1 costanti
arbitrarie. D'altra parte, la funzione S μe presente nell'equazione
soltanto attraverso le sue derivate e quindi una delle sue costanti
arbitrarie appare nell'integrale completo come una grandezza
additiva, cio¶e l'integrale completo dell'equazione di HamiltonJacobi prende la forma generale S(®; q; t)+c dove ® = (®1 ; : : : ; ®n )
e c sono costanti arbitrarie. Poich¶e la determinazione di c μe
inessenziale ai ¯ni dello studio del moto (possiamo sempre pensare di inglobarla nelle ¯h attraverso le relazioni (9.3)), in generale
questa costante sarμa assunta nulla.
9.2 Hamiltoniana indipendente da t ed azione ridotta
Teorema. Se l'Hamiltoniana H non dipende esplicitamente dal
tempo, allora il problema si riconduce all'equazione caratteristica di Hamilton-Jacobi
Ã
!
@W
H
; q = ®1
@q
(9.4)
dove l'incognita W (®; q) μe detta azione ridotta. La funzione
generatrice μe allora data da S = W ¡ Et dove ®1 ´ E (energia,
determinata dai dati iniziali). Le soluzioni q = q(®; ¯; t) si ricavano in termini delle n costanti Ph = ®h e di altre n costanti di
integrazione ¯h tramite le seguenti relazioni:
t + ¯1 =
@W (®; q)
@W (®; q)
; ¯h =
; h = 2; : : : ; n;
@®1
@®h
³
supponendo sempre che sia det
@ 2W
@®h @qk
´
(9.5)
6= 0.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
170
9 Equazione di Hamilton-Jacobi
Dimostrazione: Se H = H(p; q) allora esiste l'integrale primo
dell'energia meccanica E e, ponendo ®1 = E = H[p(t); q(t)],
risulta naturale cercare S nella forma
S(P; q; t) = W (P; q) ¡ Et:
Con tale separazione fra variabili spaziali e temporale l'equazione
di Hamilton-Jacobi (9.2) prende la forma:
Ã
!
@W
H
;q ¡ E = 0
@q
(9.6)
da cui risulta la (9.4). Come nel caso precedente risulta Qh = ¯h
e Ph = ®h costanti, tra cui P1 = ®1 = E. Ricordando poi che
@S
Q = @P
si ottiene
¯h = Qh =
@W
@S
@W
; h = 2; : : : ; n; e ¯1 = Q1 =
=
¡t
@®h
@®1
@®1
da cui segue la (9.5) completando cosμ³ la dimostrazione.
La risoluzione del moto consiste in due passi distinti. Nel primo
passo si risolve l'equazione caratteristica di Hamilton-Jacobi (9.4)
costituita da una equazione di®erenziale alle derivate parziali del
I ± ordine. Nel secondo passo, una volta determinata la W , si
risolvono le n equazioni (9.5) (ora non di®erenziabili) che determinano il moto del sistema.
Osserviamo che le n ¡ 1 equazioni ¯h = @W@®(®;q)
, h = 2; : : : ; n,
h
nelle n incognite qh permettono di determinare la "traiettoria" del
sistema nello spazio delle con¯gurazioni, cio¶e de¯niscono gli aspetti
puramente geometrici del moto. La prima equazione t + ¯1 =
@W (®;q)
μe invece l'unica che contiene il tempo t ed μe quella che
@®1
caratterizza l'aspetto cinematico del moto, cio¶e determina la legge
oraria del punto q sulla traiettoria nello spazio delle con¯gurazioni.
Osserviamo anche che il parametro ¯1 μe inessenziale in quanto
ride¯nisce solamente l'origine della scala dei tempi.
9.3 Esempio: l'oscillatore armonico
L'Hamiltoniana dell'oscillatore armonico unidimensionale μe
H(p; q) =
´
1 ³ 2
k2
p + m2 ! 2 q 2 ; ! 2 =
2m
m
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
9.4 Metodo di separazione delle variabili
171
da cui segue che l'equazione di Hamilton-Jacobi ha la forma
2Ã
!2
1 4 @S
2m
@q
3
+ m2 ! 2 q 2 5 +
@S
= 0:
@t
Ponendo S = W (E; q) ¡ Et allora l'equazione caratteristica di
Hamilton-Jacobi (9.4) si riduce a
2Ã
1 4 @W
2m
@q
!2
3
+ m2 ! 2 q 2 5 = E
che ha soluzione (de¯nita a meno di una costante additiva che
possiamo sempre assumere nulla)
Z
p
W (E; q) = 2mE
=
s
q
s
Z qp
m! 2 x2
dx =
1¡
2mE ¡ m2 ! 2x2 dx
2E
q0
q
0
2 s
mE 4
q 1¡
2
m! 2 q2
+
2E
s
0s
2E
arcsin @
m! 2
m! 2
2E
13
q A5
dove abbiamo assunto, per semplicitμa q0 = 0. Quindi
@W
¯ = ¯0 + t =
=
@E
0s
s
2m Z q
dx
q
E q0 1 ¡ m!2 x2
2E
1
1
m! 2 A
q
= arcsin @
!
2E
da cui troviamo
q=
e
s
2E
sin(!t + ¯0 )
m! 2
s
p
@W
m! 2 q 2 p
= 2mE 1 ¡
= 2mE cos(!t + ¯0 ):
p=
@q
2E
9.4 Metodo di separazione delle variabili
Nel seguito ci limitiamo a considerare solo Hamiltoniane indipendenti dal tempo e mostreremo che ci sono casi in cui l'equazione
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
172
9 Equazione di Hamilton-Jacobi
μ il caso
di Hamilton-Jacobi sia risolubile mediante quadrature. E
delle variabili separabili.
De¯nizione. Sia H(p; q) una Hamiltoniana che non dipende
esplicitamente dal tempo e sia
H
Ã
!
@W
@W
;:::;
; q1 ; : : : ; qn = E
@q1
@qn
la corrispondente equazione caratteristica di Hamilton-Jacobi. Le
variabili qh sono separabili se una funzione del tipo
W (®; q) = W1 (®; q1) + W2(®; q2 ) + : : : + Wn (®; qn )
(9.7)
decompone l'equazione di Hamilton-Jacobi in n equazioni della
forma
Hh
Ã
!
@Wh
; qh ; ®1 ; : : : ; ®n = ®h ; h = 1; : : : ; n:
@qh
(9.8)
In ogni equazione (9.8) ¯gura solo una coordinata qh , con la
corrispondente derivata di W rispetto a questa qh . Quindi viene
separata l'equazione alle derivate parziali in n equazioni ordinarie.
Poich¶e sono equazioni ordinarie del primo ordine, si possono risolh
vere per quadratura: basta esplicitare rispetto a @W
e poi integrare
@qh
rispetto a qh .
Osserviamo che:
Teorema. Se in una Hamiltoniana indipendente dal tempo
tutte le coordinate, tranne una, sono cicliche, allora si puμo applicare il metodo di separazione delle variabili, cio¶e le variabili
sono separabili.
Dimostrazione: Assumendo che sia la prima coordinata lagrangiana la coordinata non ciclica allora possiamo scrivere H =
H(p1 ; : : : ; pn ; q1). Da ciμo segue, per primaPcosa, che W μe una
soluzione del tipo W (®; q) = W1 (®; q1 ) + nh=2 Wh (®h ; qh ). Infatti, poich¶e i momenti coniugati ph alle coordinate cicliche sono
@S
costanti, le equazioni di trasformazione ph = @q
= @W
per h > 1
@qh
h
possono scriversi
@Wh
@W
=
= ph = ®h ; h > 1;
@qh
@qh
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
9.5 Esempi
173
da cui Wh = ®h qh per h > 1 e quindi
W (®; q) = W1(®; q1 ) +
n
X
®h qh :
(9.9)
h=2
Allora l'equazione di Hamilton-Jacobi si riduce a:
H
Ã
!
@W1
; ®2; : : : ; ®n ; q1 = ®1
@q1
(9.10)
con ®1 = E (energia totale). Si μe quindi trovata un'equazione
1
ordinaria del primo ordine; ricavando @W
e integrando rispetto a
@q1
q1 si ottiene W1 (®; q1 ).
Osserviamo che questo non μe l'unico caso risolubile mediante
separazione di variabili. Consideriamo ora il caso in cui l'Hamiltoniana H μe indipendente dal tempo e si puμo scrivere come
H(p; q) =
n
X
Hh (ph ; qh ):
n
X
Wh (®h ; qh )
(9.11)
h=1
Allora, ponendo
W (®; q) =
h=1
l'equazione di Hamilton-Jacobi puμo essere decomposta nelle n
equazioni
Hh
Ã
!
@Wh
; qh = eh (®h )
@qh
P
con eh funzione (regolare) arbitraria tale che nh=1 eh (®h ) = E.
Questo μe il caso, da come vedremo poi, del problema di Keplero.
9.5 Esempi
9.5.1 L'equazione di Hamilton-Jacobi per il moto centrale di un
punto in un piano
Applichiamo il metodo di separazione delle variabili ad un caso
particolare: al caso del punto mobile nel piano e soggetto ad una
forza centrale.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
174
9 Equazione di Hamilton-Jacobi
Teorema. Per il moto piano in coordinate polari (r; μ) di un
punto sottoposto a forza centrale il metodo di Hamilton-Jacobi fornisce direttamente r = r(t) e l'equazione della traiettoria r = r(μ).
Dimostrazione: La funzione Hamiltoniana, in coordinate polari
piane, risulta essere
μ
¶
1
1
p2r + 2 p2μ + V (r)
H=
2m
r
e quindi l'unica coordinata da cui dipende H μe q1 = r, cio¶e q2 = μ
μe una coordinata ciclica. Perciμo l'azione ridotta viene ricercata
nella forma (9.9)
W (r; μ; ®1 ; ®μ ) = W1(r; ®) + ®μ μ
dove ®μ = pμ = mr2 μ_
μe il momento angolare Kz rispetto all'asse ortogonale al piano e
passante per il centro della forza (ovvero la velocitμa areale moltiplicata per 2m). L'equazione caratteristica di Hamilton-Jacobi
(9.10) assume la forma:
2Ã
1 4 @W1
2m
@r
!2
+
3
®μ2 5
r2
+ V (r) = ®1 ´ E
da cui
@W1 q
= 2m[®1 ¡ V (r)] ¡ ®2μ =r2 :
@r
Da ciμo l'espressione dell'azione ridotta:
W (®1 ; ®μ ; r; μ) =
Z q
2m[®1 ¡ V (r)] ¡ ®2μ =r 2dr + ®μ μ:
Senza risolvere tale integrale (d'altra parte non abbiamo ancora
de¯nito l'espressione di V (r)) andiamo a determinare il moto del
sistema tramite le
t + ¯1 =
Z
@W
mdr
= q
;
@®1
2m[®1 ¡ V (r)] ¡ ®μ2=r2
(9.12)
e
¯2 =
Z
@W
®μ dr
q
=μ¡
:
@®μ
r2 2m[®1 ¡ V (r)] ¡ ®2μ =r2
(9.13)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
9.5 Esempi
175
dove le costanti di integrazione ¯1; ¯2 sono determinate dai dati
iniziali. Ebbene, la (9.12) dμa la legge r = r(t) e la (9.13) dμa la
traiettoria r = r(μ).
Studiamo in dettaglio la (9.13) nel caso Newtoniano (o Coulombiano) dove il potenziale μe dato da V = ¡k=r dove k μe una costante
assunta positiva. Sostituendo u = 1=r e pensando ¯2 come μ = μ0
all'istante iniziale otteniamo l'equazione di una conica rispetto a
uno dei suoi fuochi, infatti:
μ = ¯2 +
Z
= μ0 +
Z
r
du
2m
(®1
®2μ
¡ V ) ¡ u2
= μ0 +
Z
du
p
= μ0 + arccos
a + bu ¡ u2
r
μ
du
2m
(®1
®2μ
u¡c
d
¶
¡ ku) ¡ u2
dove
a=
p
2m®1
2mk
b
;
b
=
¡
;
c
=
e
d
=
a + c2 :
®2μ
®2μ
2
Da qui segue che
p
1
= u = c + d cos(μ ¡ μ0 ) e quindi r =
r
1 + e cos(μ ¡ μ0 )
dove
d
1
e e= =
p=
c
c
r
1+
a
c2
μ immediato osservare che l'eccentricitμa jej risulta minore, uguale
E
o maggiore di 1 a seconda che l'energia E = ®1 sia minore, uguale
o maggiore di 0.
9.5.2 Il metodo di Hamilton-Jacobi applicato al problema di
Keplero
La possibilitμa di separare le variabili nell'equazione di HamiltonJacobi non si limita ovviamente al caso di un'unica coordinata non
ciclica. Ad esempio per un punto mobile nello spazio e soggetto a
forze centrali allora la funzione Hamiltoniana in coordinate polari
sferiche ha la forma
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
176
9 Equazione di Hamilton-Jacobi
H=
·
¸
1
1
1
p2r + 2 p2μ + 2 2 p2' + V (r)
2m
r
r sin μ
dove solo l'angolo ' μe coordinata ciclica. Eppure l'equazione caratteristica di Hamilton-Jacobi ammette facilmente separazione delle
variabili. Cerchiamo la soluzione W (r; μ; '; ®), ® = (®1 ; ®2 ; ®3 ),
dell'equazione (caratteristica) di Hamilton-Jacobi nella forma
W = W1 (r; ®) + W2(μ; ®) + W3('; ®) ;
cio¶e:
2Ã
1 4 dW1 (r)
2m
dr
!2
1
+ 2
r
Ã
dW2 (μ)
dμ
!2
1
+ 2 2
r sin μ
+V (r) = ®1 ´ E
Ã
dW3(')
d'
!2 3
5+
(9.14)
Notiamo che la (9.14) deve essere identicamente soddisfatta per
ogni r; μ e ' e che ' compare solo nella derivata di W3. Quindi
la derivata di W3 μe una costante ®3 . Sostituendo tale costante
in (9.14) abbiamo di nuovo un'identitμa rispetto ad r e μ, dove μ
compare solo nel blocco (W20 )2 +®32(sin2 μ)¡1. Quindi anche questo
blocco μe una costante (che chiameremo ®22 ). Ottenendo in¯ne il
sistema
8 dW
3
>
> d' = ®3 ;
>
´2
<³
dW2
dμ
>
³
´
>
>
: dW1 2
dr
+
+
®23
= ®22 ;
sin2 μ
®22
= 2m [®1
r2
(9.15)
¡ V (r)]
da cui si ottiene
W3 = W3 ('; ®3); W2 = W2(μ; ®2 ; ®3 ) e W1 = W1 (r; ®1 ; ®2)
per quadrature. Si osservi che, dalle tre leggi di conservazione
(9.15) si puμo ricavare la funzione generatrice W = W1 (r)+W2(μ)+
W3('), mediante tre integrali inde¯niti.
Osserviamo poi che le costanti ®1 , ®2 e ®3 hanno un signi¯cato
¯sico notevole:
®1 = E; ®22 = K 2; ®3 = Kz :
Infatti, ®1 , come sappiamo, μe l'energia in quanto μe uguale all'Hamiltoniana; ®3 = @W
μe il momento p' = Kz (a causa della
@'
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
9.5 Esempi
177
prescrizione della funzione generatrice W di secondo tipo) e, poichμe
' μe angolo di rotazione attorno a (O; z), allora ®3 μe il momento angolare rispetto a tale asse. Osserviamo poi che, scegliendo in modo
opportuno gli assi, abbiamo '_ 0 = 0 e quindi ®3 = p' = Kz = 0,
da cui W3 = cost e quindi ' = '0 = cost, cio¶e il moto avviene
in un piano e r e μ si riducono alle coordinate polari in questo
piano. Con questa posizione allora ®22 = K 2 come abbiamo visto
nell'esempio precedente e il problema, ora nel piano ed in coordinate polari, puμo essere risolto seguendo quanto fatto nella sezione
precedente.
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
A
Complementi
A.1 Serie di Fourier
A.1.1 Serie di Fourier in forma trigonometrica
Sia data una funzione f(t) periodica di periodo T . Si de¯nisce
serie di Fourier associata a f (t) la seguente serie (al momento
formale):
·
μ
¶
μ
¶¸
1
X
1
2n¼
2n¼
t + bn sin
t
f(t) » a0 +
an cos
2
T
T
n=1
(A.1)
in cui i coe±cienti di Fourier an e bn sono dati da
μ
¶
2ZT
2n¼
an =
f (t) cos
t dt; n = 0; 1; : : : ;
T 0
T
(A.2)
μ
¶
2ZT
2n¼
bn =
f (t) sin
t dt; n = 1; 2; : : : :
T 0
T
(A.3)
e
La serie (A.1) associata a f(t) μe, al momento, solamente formale
e per questo motivo utiliziamo il simbolo »; infatti non possiamo
ancora dire nulla sulla sua convergenza e, nel caso in cui converga,
a cosa converge. A tal merito vale il seguente:
Teorema di Dirichlet: Sia data una funzione periodica f (t) di
periodo T e continua a tratti insieme alla sua derivata prima f 0 (t).
Allora la serie (A.1) associata a f(t) con i coe±cienti (A.2) e
(A.3) converge a f(t) nei punti in cui f (t) μe continua, nei punti t0
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
180
A Complementi
in cui la funzione f(t) μe discontinua allora la serie (A.1) converge
a
f (t0 + 0) + f (t0 ¡ 0)
:
2
Si noti che il termine costante nella (A.1), dato da
1
1ZT
a0 =
f(t)dt;
2
T 0
corrisponde al valore medio di f (t) in un periodo. Osserviamo
poi che, a causa della periodicitμa della funzione f(t), possiamo
esprimere i valori dei coe±cienti di Fourier an e bn scegliendo come
estremi di integrazione c e c + T con c qualunque. Ad esempio,
per c = ¡T =2 segue che
an =
1 Z T =2
f(t) cos (2n¼t=T ) dt; n = 0; 1; : : : ;
¼ ¡T =2
bn =
1 Z T =2
f(t) sin (2n¼t=T ) dt; n = 1; 2; : : :
¼ ¡T =2
e
in virtμ
u dell'osservazione precedente.
A.1.2 Serie di Fourier in forma esponenziale
Facendo uso delle formule di Eulero si puμo dare una espressione
diversa della serie di Fourier. Infatti, ricordando che
cos ® =
´
1 ³ i®
e + e¡i® ;
2
sin ® =
´
1 ³ i®
e ¡ e¡i® ;
2i
e ponendo
a¡n = an ; b¡n = ¡bn ;
per n 2 N;
e b0 = 0
allora la serie di Fourier assume la forma
·
μ
¶
μ
¶¸
1
X
1
2n¼
2n¼
f (t) = a0 +
an cos
t + bn sin
t
2
T
T
n=1
μ
¶
μ
¶¸
1 ·
X
1
2n¼
2n¼
= a0 +
an cos
t + bn sin
t
2
T
T
n=1
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
A.1 Serie di Fourier
"
1
X
1
an ¡ ibn i 2n¼ t an + ibn ¡i 2n¼ t
= a0 +
e T +
e T
2
2
2
n=1
1
1
X
X
2n¼
an ¡ ibn i 2n¼ t
T
=
e
=
cn ei T t
2
n=¡1
n=¡1
=
1
X
cn ei
2n¼
t
T
181
#
(A.4)
(A.5)
n=¡1
che μe detta serie di Fourier in forma esponenziale, dove i coe±cienti
cn sono dati da
1
1ZT
i2n¼
f(t)e¡ T t dt;
cn = (an ¡ ibn ) =
2
T 0
n 2 Z:
(A.6)
Si osserva immediatamente che, se la funzione f(t) μe a valori reali,
allora cn = c¹¡n .
A.1.3 Stima dei coe±cienti cn
Teorema: Sia la funzione periodica f(t) di classe C r ([0; T ]) con
r ¸ 1, cio¶e sia continua insieme alle sue derivate ¯no all'ordine
r. Allora si ha che
jcn j · cjnj¡r
dove la costante c, indipendente da n, μe data da
c=
·
T
2¼
¸r
max jf (r) (t)j:
t2[0;T ]
Dimostrazione: Ricordando che la derivata di una funzione periodica (e derivabile) μe ancora una funzione periodica si ottiene,
integrando per parti r volte, la seguente espressione per cn :
1
cn =
T
1
=
T
1
=
T
Z
·
0
T
f(t)e¡
i2n¼
t
T
dt
¸
T
T
1ZT 0
T
i2n¼
¡ i2n¼
t
T
f (t)
e
¡
f (t)
e¡ T tdt
¡i2n¼
T 0
¡i2n¼
0
·
¸r Z T
i2n¼
i2n¼
T ZT 0
1
T
f (t)e¡ T tdt =
f (r) (t)e¡ T t dt:
i2n¼ 0
T i2n¼
0
Quindi
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
182
A Complementi
"
#r
Z T
¯ i2n¼ ¯
1
T
jcn j ·
jf (r)(t)j ¯¯e¡ T t ¯¯ dt
T 2jnj¼
0
·
¸r Z T
1 1 T
c
· r
jf (r) (t)jdt ·
jnj T 2¼
jnjr
0
dove c μe la costante indipendente da n che vale
c=
·
T
2¼
¸r
max jf (r) (t)j:
t2[0;T ]
A.2 Teorema di annullamento degli integrali
Il teorema
di annullamento degli integrali dice che se f μe continua
R
e se ab f(x)g(x)dx = 0 per ogni g continua segue che f(x) ´ 0.
Piμ
u precisamente:
Teorema. Una funzione f 2 C([a; b]) μe identicamente nulla
sull'intervallo considerato se, e solo se,
Z
a
b
f (x)g(x)dx = 0; 8g 2 C([a; b]):
(A.7)
Dimostrazione: in un senso la dimostrazione μe ovvia. Assumiamo soddisfatta la (A.7) e supponiamo, per assurdo che f non sia
identicamente nulla. Se f non μe identicamente nulla allora esiste
x0 2 (a; b) tale che f(x0) 6= 0, in particolare supponiamo, per ¯ssare le idee e senza perdere in generalitμa, che sia f (x0 ) > 0. Per
continuitμa esiste ² > 0 tale che
(x0 ¡ 2²; x0 + 2²) ½ (a; b)
e
f(x) ¸ 0; 8x 2 (x0 ¡ 2²; x0 + 2²)
1
f(x) ¸ f(x0); 8x 2 (x0 ¡ ²; x0 + ²):
2
Consideriamo ora una funzione continua 0 · g(x) · 1 tale che
g(x) =
(
1 se x 2 (x0 ¡ ²; x0 + ²)
0 se x 2
= (x0 ¡ 2²; x0 + 2²)
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
A.2 Teorema di annullamento degli integrali
183
Per costruzione si ha
Z
b
f (x)g(x)dx =
a
¸
¸
Z
x0 +2²
x0 ¡2²
Z x0 +²
x0 ¡²
Z x0 +²
x0 ¡²
f (x)g(x)dx
f(x)g(x)dx
1
f(x0 )1dx = ²f(x0) > 0
2
contraddicendo la (A.7).
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia
Anno accademico 2008/09
Università degli Studi di Modena e Reggio Emilia