TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Reti industriali
Parte II
ELEMENTI DI INFORMATICA UFC_05
1
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Scenario Industriale
ELEMENTI DI INFORMATICA UFC_05
2
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Bus di campo (FieldBus)
Utilizzati per la comunicazione a livello di cella e al livello di
sensori/attuatori
Dai protocolli proprietari su RS485 (’80) alla definizione di
standard di uso generale (’90)
Principali requisiti:
◦ GESTIONE MESSAGGI
Aspetti architetturali (singolo master, multi-master, politica d’accesso,..)
capacità di trasmissione adeguata (numero dati per messaggio)
garanzia dei tempi massimi di trasmissione (Real Time)
◦ SICUREZZA DEL SISTEMA
protezione rispetto alla propagazione del guasto
protezione all’integrità dell’informazione (codici di controllo e/o
correzione)
◦ REQUISITI TECNOLOGICI
Compatibilità verso altri sistemi di comunicazione e/o infrastrutture
ELEMENTI DI INFORMATICA UFC_05
3
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Architettura a bus di campo
Caratteristiche
◦ Architettura a bus
◦ Trasmissione digitale dei segnali
◦ Strumenti intelligenti
Vantaggi
◦
◦
◦
◦
◦
◦
Risparmio sui costi di cablaggio e installazione
Facilità di aggiunta o rimozione dei dispositivi
Riduzione degli errori d’installazione
Condivisione delle risorse
Tolleranza ai guasti
Flessibilità
Svantaggi
◦ Problemi di interoperabilità tra sistemi diversi
◦ Difficoltà di applicazione in aree pericolose
◦ Sconvolgimento delle di progettazione
ELEMENTI DI INFORMATICA UFC_05
4
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
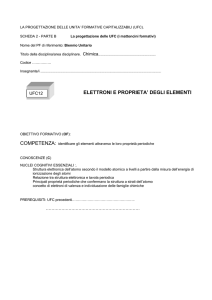
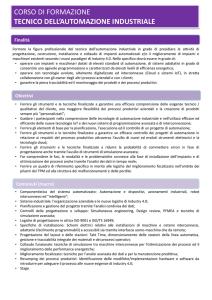
IEC 61158
Le specifiche chiave per bus di
campo sono incluse nello
standard IEC 61158
I servizi e i protocolli di comunicazione
previsti per il Bus di Campo IEC 61158
sono raggruppati in tre livelli principali,
ciascuno dei quali è definito da uno o più
documenti.
IEC 61158.7
Livello System & Network Management
Livello Application
IEC 61158.5-6
Livello Data Link
IEC 61158.3-4
Livello Physical
IEC 61158.2
◦ Il livello più alto è quello Application definito dal documento IEC
61158.5 per quanto riguarda i servizi e dal documento IEC 61158.6 per
il protocollo.
◦ Sotto di esso vi è il livello Data Link definito dai documenti IEC 61158.3
e IEC 61158.4 per quanto riguarda i servizi e il protocollo
rispettivamente.
◦ Sotto ancora vi è il livello Physical, definito dal documento IEC 61158.2.
◦ Un livello di System & Network Management supervisiona l’intera pila
di comunicazione. Il documento di definizione di tale livello ha la sigla
IEC 61158.7
ELEMENTI DI INFORMATICA UFC_05
5
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Reti industriali
ELEMENTI DI INFORMATICA UFC_05
6
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
ELEMENTI DI INFORMATICA UFC_05
7
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
ACTUATOR SENSOR INTERFACE (ASI)
Tecnologia aperta supportata da una moltitudine di fornitori
Bus di campo dedicato a sensori e attuatori “binari”
(Sensor/Actuator level)
AS-Interface è un sistema che richiede quattro
componenti fondamentali:
◦ Un master di rete, nella maggior parte dei casi nella forma di un
gateway di una rete di più alto livello industriale o di una scheda
PLC
◦ Un certo numero di dispositivi slave, nella maggior parte dei casi
di moduli di Input/Output
◦ Un alimentatore utilizzato per alimentare gli slave consentendo
in tal modo la comunicazione con il master di rete
◦ L'infrastruttura di cablaggio, nella maggior parte dei casi è
realizzata mediante il cavo piatto giallo
ELEMENTI DI INFORMATICA UFC_05
8
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
ACTUATOR SENSOR INTERFACE (ASI)
Architettura
Master/Slave (Monomaster)
Alimentazione
24V DC
Mezzo trasmissivo
Doppino non schermato
Topologia
Albero
Max Lunghezza segmento
100m senza ripet., 300m con ripet.
Max Numero di nodi
31 nella v 2.0, 62 nella v 2.1
Data Rate
5 ms per interrogare 31 nodi, 10 ms
per 62 nodi
Error Detection
Realizzata dal master
Operazioni master/slave
Il master interroga ogni slave
sequenzialmente e attende la
risposta
Inserzione/disinserzione slave a caldo Supportata
Operazioni multimaster
Non Supportata
ELEMENTI DI INFORMATICA UFC_05
9
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
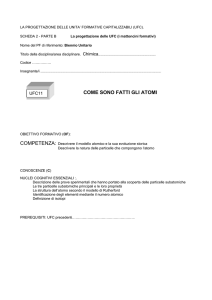
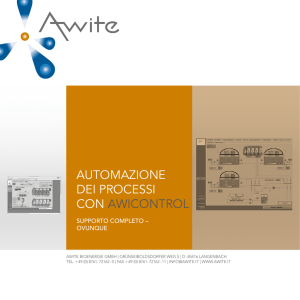
Interfaccia ASI
D0 = sensor 1
one connection
D1 = sensor 2
D2 = actuator 1
1 module
enclosure
controller
ASInterface
Slave IC
D3 = actuator 2
P0 Watchdog
energy
ma s ter
To Slave 1
To Slave 2
Slave 1
Slave 2
To Slave 31
Slave 31
up to 4
sensors
or/and
4 actuators
To Slave 1
Slave 1
ELEMENTI DI INFORMATICA UFC_05
10
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
ACTUATOR SENSOR INTERFACE (ASI)
AS-Interface è un sistema che richiede
quattro componenti fondamentali:
◦ Un master di rete, nella maggior parte dei casi
nella forma di un gateway di una rete di più alto
livello industriale o di una scheda PLC
◦ Un certo numero di dispositivi slave, nella
maggior parte dei casi di moduli di Input/Output
◦ Un alimentatore utilizzato per alimentare gli slave
consentendo in tal modo la comunicazione con il
master di rete
◦ L'infrastruttura di cablaggio, nella maggior parte
dei casi è realizzata mediante il cavo piatto giallo
ELEMENTI DI INFORMATICA UFC_05
11
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Profibus
Profibus è l'acronimo di Process Field Bus. Si tratta di un bus di
campo (field bus) messo a punto nel 1989 da un consorzio di
diverse aziende tra le quali Siemens. Le sue applicazioni sono nel
campo dell'automazione industriale e di processo.
Esiste nelle varianti
◦ DP (Decentralized Peripherals): è responsabile della comunicazione tra
il livello di controllo di un sistema di controllo automatico (PLC) e
dispositivi decentralizzati di campo. Una delle principali caratteristiche
di PROFIBUS DP è la sua alta velocità di trasmissione fino a 12 Mbit/s.
Il mezzo trasmissivo può essere il doppino intrecciato (RS-485) o la
fibra ottica a seconda delle necessità.
◦ PA (Process Automation): è stato sviluppato per l’automazione dei
processi. Comunicazione e alimentazioneTransmitter sono gestite su un
unico cavo a due conduttori corrispondente allo standard IEC 61158-2
(anche noto come MBP – Manchester coded Bus Powered).
Intrinsecamente sicuro può essere utilizzato in zone pericolose (rischio
di esplosione, …)
◦ FMS(Fieldbus Message Specification): sviluppato per gestire la
comunicazione tra dispositivi intelligenti normalmente al livello di
controllo, fornisce all’utente una ricca varietà di funzioni. Recentemente
rimpiazzata da tecnologie basate su ethernet
ELEMENTI DI INFORMATICA UFC_05
12
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Profibus
ELEMENTI DI INFORMATICA UFC_05
13
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
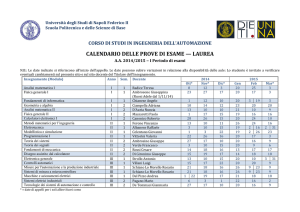
Profibus
Tutte le varianti PROFIBUS sono basate sul
modello OSI (in accordo con lo standard
internazionale ISO 7498). A causa dei requisiti
del fieldbus, solo i livelli 1, 2 e7 sono stati
implementati per ragioni di efficienza.
ELEMENTI DI INFORMATICA UFC_05
14
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Profibus (Livello fisico)
ELEMENTI DI INFORMATICA UFC_05
15
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Profibus DP (Livello data-link)
La contesa sull'accesso al mezzo fisico è gestita
unicamente dai Master, tramite un meccanismo di
passaggio di token (token passing)
Solo il master che possiede il token può
interrogare gli slave
ELEMENTI DI INFORMATICA UFC_05
16
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Profibus DP
L’aggiunta di nuove funzionalità di alto
livello ha portato a definire 3 versioni
della variante DP. In particolare:
◦ DP-V0 (1993): scambio ciclico dei dati (tra
master e slave) e diagnostica;
◦ DP-V1 (1997): scambio ciclico e aciclico dei
dati (tra master e slave) e gestione degli
allarmi
◦ DP-V2 (2002): scambio dati slave-to-slave in
modalità broadcast con ciclo di bus isocrono.
ELEMENTI DI INFORMATICA UFC_05
17
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
CAN
Nel 1986 la Bosch, su richiesta del gruppo Mercedes e BMW,
cercò di risolvere gran parte dei problemi che si
riscontravano nella diffusione delle informazioni tra i sempre
più numerosi dispositivi elettronici presenti all’interno di
un’autovettura (air conditioning control, antiblock braking
system, traction control etc.).
Fu così che nacque il
protocollo di rete
CAN (1.0)
Progettato specificamente
per il campo
dell’automotive trova oggi
applicazione anche nel campo
dell’automazione industriale
ELEMENTI DI INFORMATICA UFC_05
18
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
CAN
• Il CAN (acronimo di Controller Area Network)
è un protocollo di comunicazione seriale che
assicura un elevato livello di sicurezza per controlli
real-time.
• Il suo dominio applicativo spazia dalle reti ad alta
velocità fino ad impianti elettronici di basso
costo.
• Nel campo dell’automazione industriale motori,
sensori e numerosi altri dispositivi elettronici
sono connessi tramite CAN (con bit rate fino a 1
Mbit/s).
ELEMENTI DI INFORMATICA UFC_05
19
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
CAN
Allo scopo di ottenere un
modello trasparente ed
un’implementazione flessibile,
si potrebbe inquadrare il
protocollo CAN in 3
differenti livelli:
il livello di OGGETTO
il livello di TRASFERIMENTO
il livello FISICO
ELEMENTI DI INFORMATICA UFC_05
20
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
CAN
Ai primi due livelli (livello di OGGETTO e di
TRASFERIMENTO) sono associati tutti i servizi e le funzioni del
livello DATA-LINK definito nel modello ISO/OSI.
Lo scopo principale del livello DATA-LINK è di trasformare una
trasmissione grezza in una linea per il livello superiore che appaia
libera da errori di trasmissione non segnalati.
Visto che il livello FISICO accetta e trasmette sequenze di bit
senza far riferimento al loro significato o alla loro struttura, è
compito del livello data-link creare e riconoscere i limiti dei
pacchetti.
Il livello di OGGETTO è in grado inoltre di:
◦ capire quali messaggi sono stati trasmessi
◦ decidere quali messaggi ricevuti dal livello di trasferimento vanno
processati
ELEMENTI DI INFORMATICA UFC_05
21
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
CAN
Il cavo trasmissivo è un doppino intrecciato
(schermato o no a seconda delle applicazioni)
terminato con impedenze di valore pari a 120Ω.
ELEMENTI DI INFORMATICA UFC_05
22
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
CAN – Livello Fisico
Ogni nodo di una rete CAN è composto da 3 parti
principali:
TRANSCEIVER:
◦ alimentato tipicamente a 5V, rileva lo stato
del bus valutando la differenza di tensione
tra le due linee CAN_H e CAN_L.
◦ ∆ < 0.5 V – stato DOMINANTE
◦ ∆ > 0.9 V - stato RECESSIVO
◦ Interfaccia il Controllore CAN con il BUS
CAN CONTROLLER:
◦ trasmette e riceve dati via seriale al transceiver
e comunica col microcontrollore.
MICROCONTROLLORE:
◦ gestisce le operazioni che deve svolgere il nodo.
ELEMENTI DI INFORMATICA UFC_05
23
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
CAN
Un nodo CAN non usa informazioni sulla
configurazione del sistema.
Possono essere aggiunti nodi senza che vengano
richiesti cambiamenti a livello hardware o
software (flessibilità del sistema);
Il contenuto dei messaggi è caratterizzato da un
identificatore che non indica l’indirizzo di
destinazione del pacchetto ma descrive
semplicemente quanto vi è contenuto, affinché
tutti i nodi della rete siano in grado di decidere
attraverso il filtraggio del messaggio se
“appropriarsene” o meno;
ELEMENTI DI INFORMATICA UFC_05
24
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
CAN – Accesso al canale
CSMA/CA (Carrier Sense Multiple
Acces with Collision Avoidance).
Quando il bus è libero ogni unità è
abilitata a trasmettere informazioni
(multimaster).
Solo l’unità a cui è associato il messaggio
con priorità più alta si guadagna l’accesso
al canale.
ELEMENTI DI INFORMATICA UFC_05
25
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
CANOpen
CANOpen specifica il protocollo di livello più alto ed è basato sul
bus CAN. Transmission of time-critical process data according to
the producer consumer
La rete CANopen è basata su una struttura master/slave per la
gestione del bus ed è costituita da un master e da uno o più slave.
Il master esegue le funzioni seguenti:
◦ inizializzazione degli slave,
◦ supervisione degli slave,
◦ inoltro delle informazioni di stato sugli slave. principle
ELEMENTI DI INFORMATICA UFC_05
26
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Industrial Ethernet
Per Industrial Ethernet (IE). S’intende l’uso delle
tecnologie ethernet in ambiti industriali quali automazione e
controllo dei processi.
Un certo numero di tecniche e accorgimenti sono utilizzati
per adattare Ethernet alle esigenze dei processi industriali,
che richiedono spesso risposte in tempo reale.
Usando tecnologie Ethernet standard, sistemi di automazione
di diversi produttori possono essere interconnessi tra loro.
Industrial Ethernet trae vantaggio dal largo mercato del
computer networking per ridurre I costi e migliorare le
performance di comunicazione tra I controllori industriali.
I componenti IE usati negli impianti industriali devono essere
progettati per funzionare in ambienti difficili con temperature
extreme, alta umidità, vibrazioni, …di molto superiori ai
normali ranges riscontrabili in uffici o altri ambienti
controllati.
ELEMENTI DI INFORMATICA UFC_05
27
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Industrial Ethernet
Vantaggi
◦ Maggiore velocità (ad es. Da 9.6 kbit/s with RS-232 a 1 Gbit/s with Gigabit
Ethernet)
◦ Maggiori lunghezze
◦ Possibilità di usare cavi access points, routers, switches standard, which are
enormemente più convenienti degli equivalenti dispositivi che usano le porte
seriali.
◦ L’architettura Peer-to-peer può sostituire quella master-slave tipica dei fieldbus
◦ Migliore interoperabilità tra dispositivi di produttori diversi
Maggiori difficoltà nell’uso di Industrial Ethernet
◦ Migrazione da protocolli esistenti a nuovi protocolli (esistono numerosi
dattatori)
◦ La necessita di risposte Real-time può soffrire la necessità di usare il TCP come
protocollo di trasporto (infatti alcuni prot. usano UDP and protocolli del livello
2 per questa ragione)
◦ Gestire l’intero stack TCP/IP è molto più complesso che semplicemente
inviare/ricevere dati seriali
◦ La dimensione minima del frame Fast Ethernet che include dello spazio interframe è circa 80 bytes, mentre la dimensione tipica nelle comunicazioni
indusrialli oscilla tra 1 e 8 bytes. Questo spesso si traduce in una efficienza di
trasmissione dati inferiore al 5%, annullando i vantaggi del bitrate più alto.
ELEMENTI DI INFORMATICA UFC_05
28
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Classificazione IE
A seconda dei costi e della necessità di risposte di
tipo Real-Time, le tecnologie IE, possono essere
raggruppate in 3 diverse classi:
◦ Classe A: usa hardware ethernet non modificato e lo
stack tcp/ip per i processi di comunicazione.
◦ Classe B: usa hardware ethernet non modificato,
non usa lo stack tcp/ip ma un protocollo dedicato
(Process Data Protocol) trasportato direttamente nel
frame ethernet.
◦ Classe C: ottiene limiti prestazionali migliori grazie
all’uso di hardware modificato (dedicato) almeno per
quanto riguarda i dispositivi slave.
ELEMENTI DI INFORMATICA UFC_05
29
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Classe A
Le tecnologie di classe A utilizzano un approccio di tipo “best effort”
(attenzione alla rapidità di consegna non agli errori di trasmissione)
Risente comunque di ritardi non predicibili dovuti a componenti come gli
switches e traffico sulla rete.
Il più grande ostacolo all’ottenimento di performance real-time è dovuto
però a ritardi nell’attraversamento dei livelli 3 e 4 (TCP/UDP e IP)
ELEMENTI DI INFORMATICA UFC_05
30
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Classe B
Il miglioramento delle prestazioni è ottenuto attraverso
l’inserimento di un protocollo dedicato che opera
parallelamente al TCP/UDP e IP
Questi protocolli sono ancora utilizzabili ma il loro accesso
alla rete ethernet è regolamentato da quello che può essere
considerato un livello di temporizzazione (Timing Layer)
ELEMENTI DI INFORMATICA UFC_05
31
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Classe C
Anche in questo caso lo stack tcp/ip può
accedere alla rete ethernet attraverso un
time-layer
ELEMENTI DI INFORMATICA UFC_05
32
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Profinet
Nasce dall’esigenza di coordinare varie celle tra
loro e di collegarle con le reti Intranet e Internet
dell’azienda per gestire i processi di produzione e
garantire servizio e manutenzione in remoto
Sviluppata da Profibus principalmente per far
interagire segmenti separati di bus di campo
attraverso Ethernet e collegarli ai sistemi di
gestione dell’azienda secondo una struttura
rigorosamente gerarchica
ProfiNet permette l’interazione tra oggetti remoti
ELEMENTI DI INFORMATICA UFC_05
33
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Profinet
ELEMENTI DI INFORMATICA UFC_05
34
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
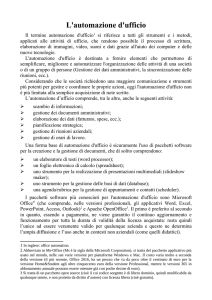
Profinet
3 varianti
ELEMENTI DI INFORMATICA UFC_05
35
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Profinet
Non viene più utilizzato il modello Master/Slave,
ma il modello Producer/Consumer
Uno dei nodi è l’arbitro della rete; vengono
identificati i nodi che sono produttori di un certo
tipo di informazioni ed i nodi che ne sono
consumatori.
L’arbitro della rete, piuttosto che abilitare o meno
i singoli nodi alla trasmissione, consente la
comunicazione di una certa trasmissione,
implicitamente abilitando il suo produttore a
trasmetterla ed i suoi consumatori a riceverla
ELEMENTI DI INFORMATICA UFC_05
36
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Profinet
La rete PROFInet distingue tra tre tipi
diversi di periferiche IO
IO-Controller: dispositivo che controlla
le operazioni di automazione
IO-Device: dispositivo di campo
monitorato e gestito dall’IO-Controller
IO-Supervisor: sono software
(solitamente su PC) per settaggio di
parametri e diagnostica degli IO-Device
ELEMENTI DI INFORMATICA UFC_05
37
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Profinet - comunicazioni
La comunicazione in profinet presenta 3
livelli di prestazioni:
◦ TCP, UDP e IP per i dati non critici rispetto al
tempo, come assegnamento di parametri e
configurazione.
◦ (Soft) Real Time per dati di processo critici
rispetto al tempo; utilizzata nel campo
dell’automazione aziendale.
◦ IRT (Isochronous Real Time) per particolari
applicazioni di motion control.
ELEMENTI DI INFORMATICA UFC_05
38
TECNICO SUPERIORE PER L’AUTOMAZIONE INDUSTRIALE
Profinet IRT
Il minimo tempo di ciclo è determinato dalla necessità di includere il
generico traffico TCP/IP in uno slot largo abbastanza da saturare il frame
ethernet
Questo approccio conduce a una utilizzazione della banda non ottimale
poiché sebbene molte applicazioni hanno sporadiche comunicazioni TCP/IP,
la banda rimane disponibile per questo tipo di traffico
ELEMENTI DI INFORMATICA UFC_05
39