I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Maturità 2015
Magazzino Automatico
CONTROLLATO DA ARDUINO
Basso Riccardo
5°A Elettronica
I.I.S.
BASSO RICCARDO
L.Einaudi - Scarpa
MAGAZZINO AUTOMATICO
1! di 59
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Sommario
1.
Introduzione
Pag.
5
2. Spiegazione del progetto
Pag.
5
3. Introduzione alla meccanica
Pag.
6
3.1
Numerazione scaffali
Pag.
7
3.2
Disegni in AutoCAD
Pag.
8
Pag.
9
4. L’Hardware e il Software
4.1
Arduino Uno
Pag.
9
4.2
Arduino Mega 2560
Pag.
9
4.3
Arduino
Pag.
10
Pag.
11
5. L'Elettronica
5.1
Comunicazione Seriale UART
Pag.
11 - 12 - 13
5.2
Bus RS485
Pag.
14
Adattatore Bus RS485
Pag.
15
5.2.1.1
Pag.
15
Fotocellule a infrarosso
Pag.
16
5.3.1
Trasmettitore e Ricevitore
Pag.
16 - 17
5.3.2
Master
Pag.
18
5.3.3
Lista Componenti
Pag.
18
H-Bridge per Motori
Pag.
19 - 20
5.4.1
Master
Pag.
21
5.4.1
Lista Componenti
Pag.
21
6. Motore DC
Pag.
22
7. Asse X
Pag.
23
5.2.1
5.3
5.4
MAX 485
7.1
Meccanica Generale
Pag.
23
7.2
Elettronica Asse X
Pag.
23
7.2.1
Schema a blocchi
Pag.
23
7.2.2
Schemi
Pag.
24 - 25
7.2.3
Master
Pag.
26
Pag.
26
7.2.4 Lista Componenti
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
2
I.I.S. EINAUDI - SCARPA
8.
Asse Y
10.
11.
Pag.
27
8.1
Meccanica Generale
Pag.
27
8.2
Elettronica
Pag.
27
8.3
9.
MATURITA’ 2015
8.2.1
Schema a blocchi
Pag.
27
8.2.2
Schemi
Pag.
28
8.2.3
Master
Pag.
29
8.2.4
Lista Componenti
Pag.
29
Comunicazione tra gli assi
Pag.
30
8.3.1
Schemi
Pag.
30 - 31
8.3.2
Master
Pag.
32
8.3.3
Lista Componenti
Pag.
32
Pag.
33
Asse Z
9.1
Meccanica Generale
Pag.
33
9.2
Elettronica
Pag.
33
9.2.1
Schema a blocchi
Pag.
33
9.2.2
Schemi
Pag.
33 - 34
9.2.3
Master
Pag.
35
9.2.4
Lista Componenti
Pag.
35
Pag.
36
Nastro Trasportatore
10.1
Meccanica Generale
Pag.
36
10.2
Elettronica
Pag.
36
10.2.1
Schema a blocchi
Pag.
37
10.2.2
Lista Componenti
Pag.
37
Pag.
38
Pag.
38
Centraline di Comando
11.1
Centralina Principale
11.1.1
Tastierino e Display
Pag.
38 - 39 - 40
11.1.2
Funzioni Tastierino
Pag.
42
11.1.3
Master
Pag.
41
11.1.4
Lista Componenti
Pag.
40
BASSO RICCARDO
MAGAZZINO AUTOMATICO
3! di 59
!
I.I.S. EINAUDI - SCARPA
11.2
12.
13.
MATURITA’ 2015
Centralina Secondaria
Pag.
43
11.2.1
Schemi
Pag.
43 - 44
11.2.2
Master
Pag.
44
11.2.3
Lista Componenti
Pag.
44
Pag.
45
Alimentatore 12V - 4A
12.1
Schema a blocchi
Pag.
45
12.2
Trasformatore
Pag.
45
12.3
Ponte a diodi
Pag.
46 - 47
12.4
Il Filtro
Pag.
47 - 48
12.5
Regolatore di Tensione
Pag.
48
12.6
Spiegazione de circuito
Pag.
49
12.7
Master
Pag.
50
12.8
Lista Componenti
Pag.
50
Pag.
51
Collegamenti con le materie
13.1
Inglese
Pag.
51
13.2
Elettronica
Pag.
52 - 53
13.3
T.P.S.e.e
Pag.
54 - 55 - 56
13.4
Matematica
Pag.
57 - 58 - 59
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
4
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
INTRODUZIONE
Questo progetto, dopo tante ricerche, è stato pensato per poter dare un’idea di un
magazzino automatico. Un sistema che viene utilizzato in grandi aziende e che facilita
l’operazione che un tecnico dovrebbe fare manualmente, velocizzandola.
Un progetto che è stato iniziato agli inizi di Novembre 2014, pensando prima di tutto a come
potesse essere strutturato e, secondariamente a tutta l’elettronica e la meccanica. Questo
progetto viene pensato come se si dovesse fare un prototipo di un vero e proprio
magazzino automatico, quindi verranno spiegate e descritte tutte le singole piccolezze di un
progetto che può essere un vero “utensile” per facilitare la vita di certe persone e la
velocità di mercato. La velocità di un magazzino automatico è molto più alta di quella di un
operaio, in quanto appena il computer rileva l’ordine di un certo prodotto, lo preleva
immediatamente, senza dover controllare la sua localizzazione, perché è controllato dal
sistema stesso che memorizza la posizione di tutti i prodotti.
SPIEGAZIONE DEL PROGETTO
Di seguito riportiamo di come avviene il funzionamento del magazzino automatico.
Il progetto sarà controllato interamente da microcontrollori già costruiti: Arduino; Ne
serviranno 5. La centralina principale (primo Arduino Mega 2560) servirà per gestire gli
ordini da effettuare, questa sarà collegata ad una centralina secondaria (secondo Arduino
Mega2560) che servirà per gestire la visualizzazione a display dello stato dell’ordine. Le
due centraline comunicano tramite una trasmissione Bus e andranno a gestire (tramite
Arduino Uno) i vari assi del magazzino (X, Y, Z). Quando la centralina principale riceve un
ordine (possibilità di effettuare quattro ordini con quattro prodotti), invia alla centralina
secondaria l’ordine con il codice dello scaffale dove è situato il materiale da prelevare e
questa invia i comandi ai motori per poter eseguire l’ordine.
Quando ogni asse ha finito il proprio compito viene avviata la manovra di prelevamento del
materiale, quando anch’essa sarà terminata allora le due centraline comunicano e faranno
partire la manovra successiva. Il carrello arriverà, poi, alla stazione di carico-scarico,
attivando il nastro trasportatore quando l’operazione sarà finita.
Sulla sezione display verrà visualizzato il codice del prodotto e la quantità da prelevare con
un simbolo se si tratta di scarico e un altro se si tratta di carico.
A operazioni concluse si premerà un pulsante di “fine operazione” e il carrello porterà il
bancale sulla posizione iniziale.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
5! di !59
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
INTRODUZIONE ALLA MECCANICA In questo progetto, è presente una parte molto importante di meccanica.
Per poter realizzare la meccanica, in modo tale che tutta la struttura si ben solida e che tutti
i meccanismi funzionino perfettamente abbiamo utilizzato del legno per la base principale, e
le varie scaffalature, mentre per ingranaggi, passacavi e meccanica vera e propria (come
ruote, binari ecc.), materiali in plastica o ferro (o acciaio).
Abbiamo utilizzato vari utensili, utili per poter modificare al meglio la struttura e la
meccanica.
Utensili utilizzati:
-Avvitatore;
-Trapano a colonna;
-Cacciaviti vari;
-Sega Elettrica;
-Martello;
-Sega a mano;
Il progetto è formato da tre assi su cui si muove il carrello:
-Asse X: Asse che si muoverà sulla base principale in orizzontale per poter raggiungere la
giusta posizione degli scaffali;
-Asse Y: Asse che si muoverà in verticale per poter consentire all’Asse Z di andare a
prelevare il materiale sulle scaffalature;
-Asse Z: Asse in grado di muoversi avanti e indietro per prelevare il materiale richiesto.
Gli scaffali sono in tutto 24; Ci saranno 6 colonne e 4 righe sullo scaffale.
Poi c’è la postazione “Nastro”, in cui il carrello arriva e deposita il materiale prelevato in
precedenza.
Quest’ultimo avrà il compito di portare in una posizione di “scarico” tutto il materiale, e
sarà formato da un nastro che gira attorno a due perni, grazie ad un motore DC.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
6
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Numerazione scaffali Come abbiamo precisato, gli scaffali sono 24.
Quindi avremo 6 posizioni totali per l’Asse X, 4 posizioni per l’Asse Y, 2 posizioni per l’Asse
Z e una posizione per il Nastro.
Asse X avremmo 6 posizioni in quanto ci sono 6 colonne di postazioni merce.
Asse Y avremmo 4 posizioni in quanto ci sono 4 righe di postazione merce.
Asse Z avremmo 2 posizioni in quanto l’asse farà un movimento per prelevare il materiale e
un movimento per tornare in condizione normale.
Il nastro ha una sola, quella di arrivo merce.
Di seguito c’è lo schema rappresentativo della scaffalatura.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
7! di 59
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
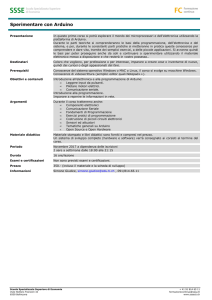
Disegni in AutoCAD VISTA LATERALE DEL MAGAZZINO
VISTA DAVANTI DEL MAGAZZINO
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
8
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
L’HARWARE E IL SOFTWARE In questo progetto si è deciso di utilizzare un certo tipo di microcontrollore per pilotare il
tutto: “Arduino”. Più in dettaglio “Arduino Uno” e “Arduino Mega2560”. Mentre per il
Software, ovviamente, utilizziamo “Arduino”, un programma utile per caricare i programmi
nel proprio Hardware.
Arduino Uno La Arduino Uno è una scheda basata sul microcontrollore Atmega328. Dispone di 14
digitali pin di ingresso-uscita (di cui 6 possono essere utilizzate come uscite PWM ), 6
ingressi analogici, quarzo da 16 MHz, una connessione USB, un jack di alimentazione e un
pulsante di reset. Esso contiene tutto il necessario per supportare il microcontrollore:
collegandola a un computer con un cavo USB o alimentarla con un adattatore o batteria
AC -DC. Le caratteristiche principali sono le seguenti:
-Microcontrollore: Atmega 328
-Tensione di Lavoro: 5V
-Pin Digitali I/O: 14 (Di cui 6 utilizzabili come uscite PWM)
-Pin Analogici: 6
-Corrente dei Pin I/O: 30mA
-Corrente del Pin 3,3V: 50mA
- Velocità di Clock: 16MHz
Arduino Mega2560 L'Arduino Mega 2560 è una scheda di sviluppo basata sul microcontrollore ATmega2560.
Questa scheda ha 54 Pin I/O (14 dei quali possono essere utilizzati come uscite PWM), 16
ingressi analogici, 4 UART, un quarzo da 16MHz, una connessione USB, connettore jack
per alimentazione esterna e pulsante di reset. Sulla scheda c'è tutto l'occorrente per
supportare il microcontrollore: basta semplicemente connetterla ad un pc attraverso un
cavo USB per cominciare da subito. Le caratteristiche principali sono le seguenti:
-Microcontrollore: Atmega 2560
-Tensione di Lavoro: 5V
-Pin Digitali I/O: 54 (Di cui 15 utilizzabili come PWM).
-Pin Analogici: 16
-Corrente dei Pin I/O: 40mA
-Corrente del Pin 3,3V: 50mA
- Velocità di Clock: 16MHz
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
9
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Arduino Il Software Arduino ci permetterà di programmare le nostre piattaforme che poi
svilupperanno il progetto.
Arduino è un compilatore che utilizza come linguaggio il “C”, ma con le sue librerie e
funzioni.
Esistono delle librerie già scritte che ci permettono di semplificare i nostri programmi, altre
invece bisogna compilarle.
Ogni piattaforma ha il suo microcontrollore, ma tutte si programmano tramite lo stesso
software e lo stesso linguaggio.
Ci sono delle funzioni base, necessarie, per far compilare un programma correttamente:
- voidSetup () {….} è la prima funzione che richiama Arduino nel compilare il programma.
Serve per dichiarare le nostre variabili, lo stato dei pin o per eventuali comunicazioni
seriali.
- voidLoop () {….} è la funzione che esegue ciclicamente il nostro programma.
Poi ci sono delle cose importanti da tener conto della sintassi:
- Il punto e virgola (;) deve essere inserito alla fine di ogni istruzione per separarle dalle
altre istruzioni, se si omette, il compilatore darà errore nella compilazione.
- Le parentesi graffe ( {} ) definiscono l'inizio e la fine di un blocco di istruzioni e funzioni.
Ad una parentesi che si apre deve corrisponderne la chiusura. Lo sbilanciamento delle
parentesi è spesso motivo di criticità del codice di un programma sostanzioso, quindi
errore di compilazione del codice scritto.
- I commenti: Possono essere fatti in due modi:
a) Blocco di Commenti: Un blocco di commenti inizia con /* e termina con i simboli */
/* Tra questi simboli posso commentare il codice che sviluppo senza che in fase di compilazione venga occupata memoria. Questi commenti vengono ignorati.*/
b) Linea di Commento: Quando si vuole commentare solo una linea si utilizza: //
Le linee singole di commento vengono spesso usate dopo un'istruzione per fornire più informazioni relativamente a quanto serva all’istruzione per poterlo ricordare anche in seguito.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
10
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
L’ELETTRONICA In questo capitolo si tratterà tutto ciò che riguarda l’elettronica.
Innanzitutto bisogna dire che tutti i circuiti che verranno assemblati sono costruiti da
macchine, mentre le saldature e la disposizione componenti è eseguita da una persona,
quindi saranno basette autocostruite.
Per realizzarle ci saranno utili due software: Per disegnare i circuiti elettrici OrcadCapture,
mentre per lo sbroglio OrcadLayout.
Tutti i componenti utilizzati sono componenti molto frequenti e facili da reperire, con basso
costo.
Ora andiamo a descrivere ogni singolo circuito nei prossimi sottocapitoli.
Comunicazione Seriale UART
Descriviamo di seguito i concetti di UART.
UART è acronimo di Universal Asynchronous Receiver-Transmitter e si riferisce ad un
modulo elettronico in grado di comunicare in modo asincrono con un altro modulo sia
trasmettendo che ricevendo dei dati.
Per "asincrono” si intende la caratteristica di non avere alcuna sincronizzazione,
fra i due moduli, ovvero nessun segnale particolare che tenga i moduli sincronizzati fra loro.
Sia definito un dispositivo A e un dispositivo B collegati fra loro semplicemente da due fili
elettrici come in figura qui sotto:
A
A
La freccia che va da A verso B rappresenta il nostro “Filo A” mentre quello che va da B ad A
rappresenta il “Filo B”.
Ipotizziamo inizialmente che il dispositivo A abbia il ruolo di "trasmettitore" (ovvero abbia
dei dati da trasmettere) verso B che farà invece da "ricevitore". Questi dati sono per
esempio il frutto di un'elaborazione di A, oppure la raccolta dall'esterno di informazioni da
sensori, ecc... in pratica qualunque informazione digitale.
Uno di questi fili (filo A) fa da riferimento per l'altro (normalmente viene chiamato "massa"),
mentre l'altro (filo B) viene posto (dal dispositivo A) ad una tensione, ovvero ad un
voltaggio, che può avere due valori: 0 oppure una certa tensione predeterminata, che
dipende da come è fatto il circuito stesso. La comunicazione seriale consiste nell'alternare i
valori di tensione sul filo B da parte del dispositivo A (trasmettitore), in modo che il
dispositivo B (ricevitore) li percepisca, e seguendo i valori e le loro alternanze sia in grado
di decodificare le informazioni trasmesse.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
11
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Ovviamente questa alternanza viene effettuata secondo una tempistica precisa, che
dipende da un cosiddetto clock: sia A che B integrano un clock che scandisce il tempo alla
comunicazione, ed in pratica la durata di ogni singolo "bit" è pari al reciproco di questo
clock. Questo clock nelle UART si esprime come "baud rate". Ogni "scatto" del clock
permette al circuito trasmittente di spedire sul filo B il bit successivo.
Il protocollo della UART è fra i più semplici ed è costituito dalle seguenti fasi:
1) si definisce una velocità di trasmissione / ricezione dei dati (baud rate);
2) si spezza la stringa di bit da trasmettere in stringhe molto corte;
3) si fascia ogni pacchetto con un ulteriore bit iniziale, detto bit di start, e con uno finale,
detto bit di stop.
Parametri di comunicazione:
1) 1 bit di start (che c'è sempre ed è uno solo);
2) "bit di dati" (ovvero vengono inviati per ogni pacchetto i bit di dati "utili", più ovviamente
quelli
del protocollo);
3) un solo bit di stop;
4) nessuna parità, ovvero il bit di parità è assente.
Ogni "pacchetto" sarà lungo pertanto: 1 + n°bit + 1 e porta n°bit bit di informazione.
Nell'analisi della comunicazione partiamo dal bit di start. Il bit di start permette al ricevitore
(B) di
"capire" quando iniziano ad arrivare dei dati, rispetto ad una situazione "di riposo" (idle)
della linea, che viene mantenuta ad un livello costante. Per default questo livello è “1".
Il bit di start non è altro che un primo bit a 0: è un bit che fa da "contrasto" al valore
costante “1" della linea.
In pratica, per iniziare la trasmissione, A pone a 0 la linea per un tempo pari al reciproco del
baud rate, mentre B si accorge di ciò perchè sta continuamente osservando la linea proprio
per vedere quando il voltaggio sulla stessa passa da un certo valore a "0".
A questo punto, il trasmettitore A può inviare, uno ad uno, ad una cadenza dettata dal
baud rate, gli n°bit della parola; questo significa che a cadenza regolare imposta sul filo B il
valore del bit corrispondente, e, mantenendo tale valore sulla linea, attende un tempo.
Terminati gli n°bit, il trasmettitore imposta il "bit di stop": è semplicemente un bit fisso,
aggiuntivo, e rovesciato rispetto al bit di start, ovvero nel nostro caso posto a "1".
B vede solo la linea costituita dal filo A e filo B, e misura continuamente il valore della
tensione del filo B rispetto al filo A (che fa da riferimento). Per quanto detto sopra, in
condizioni di attesa continua a misurare una tensione presente, pertanto un livello logico
“1". Ad un certo punto B vede cambiare lo stato della linea da 1 a 0: cosa significa? Significa
che stanno arrivando dei dati e il cambiamento è dovuto proprio al bit di start.
“B” è interessato a capire lo stato della linea nei vari punti "centrali" dei bit trasmessi,
pertanto:
1) B attende il valore del bit 1;
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
12
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
2) per n° volte, B attende la durata di un bit e rileva lo stato della linea;
3) ogni rilevazione corrisponde ad uno dei bit di dati utili trasmessi;
4) terminato l'ultimo bit il ricevitore B attende un altro bit e si rimette in attesa di un cambio
di stato. Il ciclo continua senza sosta.
Vediamo ora quali possono essere alcuni problemi legati a questa trasmissione asincrona.
Innanzitutto, come dice la parola stessa, la modalità di ricetrasmissione dei dati è
"asincrona" in quanto i due dispositivi non condividono un'unica fonte di riferimento per le
temporizzazioni, ma:
1)devono mettersi d'accordo prima su che clock (baud rate) usare;
2)l'intero processo si basa di fatto su due clock che possono risultare all'atto pratico
leggermente diversi.
Cosa succede nel caso in cui il clock del ricevitore sia diverso da quello del trasmettitore?
Nel caso di differenze notevoli non è possibile alcuna comunicazione, in quanto le letture
del ricevitore sono completamente scoordinate, ma nel caso di differenze limitate ci
possono essere dei problemi soprattutto quando i dati vengono inviati senza interruzione
fra i pacchetti.
Perchè i clock, pur nominalmente uguali, potrebbero essere diversi? Per motivi fisici, legati
alla generazione e alla stabilità dei clock stessi. I clock sono quasi sempre derivati da
oscillatori al quarzo che oscillano ad una frequenza che dipende dalle loro caratteristiche
fisiche.
La soluzione più semplice consiste nel mettere due quarzi identici sia nel trasmettitore che
nel ricevitore, ma in molte situazioni ciò non è sufficiente.
Per prima cosa c'è una tolleranza nella produzione dei quarzi ma questo è ininfluente per
quanto riguarda l’UART.
Se A e B hanno due quarzi nominalmente uguali, ma A e B vengono mantenuti a
temperature diverse, i rispettivi clock avranno delle differenze.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
13
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Bus RS 485 Il bus RS485 è molto usato in ambito industriale, in quanto prevede una trasmissione
differenziale, ovvero gli stati logici dei bit non corrispondono più a 5 v e GND, ma ad
una differenza positiva o negativa della tensione tra due conduttori.
In caso di differenza di tensione positiva, si verifica lo stato logico 1; in caso di differenza
negativa, 0.
Questo si traduce in un enorme vantaggio, perché non importa il livello della tensione che
per via dei disturbi può anche essere sfalsata. La distanza massima raggiungibile infatti è
400-600 m, estendibile fino a 1200m, utilizzando un cavo a coppie ritorte (twistato).
Il cavo twistato è più immune ai disturbi, in quanto composto da diverse spire alternate
(cioè il cavo A passa prima sopra poi sotto al cavo B), e i disturbi elettromagnetici agiscono
allo stesso modo sui due conduttori. In un cavo normale bipolare, i disturbi elettromagnetici
agiscono maggiormente sul conduttore più esterno.
Nell’immagine possiamo vedere varie configurazioni di un bus.
Nella prima immagine in alto a sinistra abbiamo una comunicazione con un solo filo ossia quello portante
una certa tensione. In quella appena sotto abbiamo anche il filo 2 che è in comune ai due ossia GND (0V).
Nella terza è la nostra configurazione ossia i due fili “intrecciati” per deviare il problema del disturbo in un
solo filo.
Il bus RS485 permette l’interfacciamento di più dispositivi, di cui solo uno trasmettitore,
sulla stessa linea bus.
Questo permette di realizzare reti di dispositivi anche abbastanza complesse, a basso
costo, in quanto è sufficiente aggiungere alla porta UART del microcontrollore un modulo
aggiuntivo. La quantità massima di dispositivi sulla stessa linea è 32, per via
dell’assorbimento di corrente di ognuno di essi, ma utilizzando circuiti integrati a basso
assorbimento è possibile estendere questo limite.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
14
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Adattatore Bus RS 485
Abbiamo spiegato nel paragrafo precedente che per poter usare la comunicazione seriale
abbiamo bisogno di un adattatore, infatti, in questo capitolo andremmo a trattare e come
costruire il nostro adattatore seriare.
Il circuito sarà formato principalmente dall’integrato MAX485, poi abbiamo 3 jumper per
poter selezionare la combinazione giusta per le varie comunicazioni, in quanto non sono
tutte uguali nei vari schemi elettrici.
Le tre resistenze servono a bilanciare le linee (A e B):
-La R1 di pull-up tiene il segnale della linea A alto per evitare problemi durante le fasi in cui
non ci sono trasmettitori collegati e per ogni rete RS485 ce ne deve essere solo una attiva;
-la R2 di pull-down tiene il segnale della linea B basso, in una rete RS485 ce ne deve essere
solo una attiva;
-la R3 è la resistenza di terminazione e per le reti corte a basso baud-rate (9600 bps) si
può anche non attivare, ma se il baud-rate aumenta (o anche la lunghezza della linea), si
attiva quella del primo e dell’ultimo modulo della rete.
Il circuito sottostante sarà integrato nei circuiti che andranno a comporre le basette
inserite sopra ogni Arduino Uno e Mega.
MAX485
L’integrato MAX485 fa parte della scheda di interfaccia bus e si occupa dell’adattamento sei segnali in logica TTL
entranti in segnali a logica RS485 e viceversa.
Nel dettaglio si occupa di effettuare le necessarie negazioni per garantire le caratteristiche differenziali della linea RS485
e i livelli logici TTL associati utilizzati nel resto della scheda.
L’integrato, in figura sottostante, è dotato di un trasmettitore e un ricevitore le cui attivazioni sono controllabili tramite
due terminali:
- RE: a livello basso attiva l’unità ricevente dell’integrato;
- DE: a livello alto attiva l’unità trasmittente sul bus.
Le principali caratteristiche:
- Tensione di alimentazione 5V (max 12V);
- Supporto per bus RS485 fino a 32 dispositivi;
- Autolimitazione corrente in caso di cortocircuito.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
15
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Fotocellule a infrarosso Per poter far in modo che il magazzino possa fermarsi ad una determinata e precisa
posizione sono necessari dei sensori. Ho scelto di utilizzare le fotocellule a infrarosso
recuperate da delle vecchie stampanti.
Sono già compresi in un unico blocco trasmettitore e ricevitore.
Successivamente andremo a descrivere separatamente il trasmettitore e il ricevitore e il loro
funzionamento.
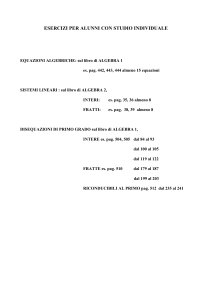
Trasmettitore e Ricevitore
Sia trasmettitore che ricevitore sono integrati in un unico case ma separati da due reparti
diversi, come segue:
Come vediamo da una parte è presente il trasmettitore (TX) e dall’altra
il ricevitore (RX). Infatti, il trasmettitore trasmette una luce nel piccolo
spazio bianco fino al ricevitore, quindi un raggio continuo, quando si
presenterà un ostacolo tra TX e RX allora il raggio sarà interrotto.
Per la parte del trasmettitore non c’è niente da dire in quanto è un semplice led che emette
luce verso il ricevitore. Sarà posta una resistenza in serie al led di protezione per la
corrente. Per il ricevitore, invece, è più complesso. Parliamo di un semplice transistor BJT,
ma senza il terminale di BASE; Questo perché sulla base sarà presente il flusso luminoso
che arriva dal led trasmittente. Il transistor è in grado di essere interdetto, quindi in
conduzione, quando è presente della luce sulla base che sarà poi una corrente che innesca
il transistor. Quindi in presenza di luce il transistor conduce grazie alla corrente di base e
alla tensione BC (base-collettore). Il terminale di emettitore sarà l’uscita del nostro
sensore, dove sarà prelevata la tensione o segnale di uscita. Di seguito proponiamo il
circuito che è stato progettato per questo sensore:
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
16
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Quando il trasmettitore emette luce questa viene captata dalla base del transistor ossia del
ricevitore quindi sul collettore del ricevitore (in uscita) è presente un livello basso (L).
Questo livello è minore del livello che si presenta sul piedino non invertente
dell’operazionale, per questo essendo V+>V- allora in uscita dell’operazionale si ha un livello
alto (H). Il transistor funziona da inverter ossia se in ingresso (sulla base) è presente un
livello basso, in uscita (collettore) avrò un livello alto e viceversa. Per questo motivo ora
avremmo un livello alto sulla base quindi il transistor conduce. Conducendo il diodo led si
accende. Quando invece è presente un ostacolo sul sensore, il transistor (ricevitore) non
conduce e quindi sul piedino invertente dell’operazionale si presenta un livello alto (H) che
è maggiore del livello sul piedino non invertente dell’operazionale. In uscita
dell’operazionale quindi abbiamo un livello basso (L). Sulla base del transistor si presenta
un livello basso (L) quindi non conduce, di conseguenza il diodo led in uscita (collettore) si
spegne.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
17
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Master
Elenco Componenti
N°
DESCRIZIONE MATERIALE
QTA’
1
Resistenza 1/4 Watt, valori: 1kΩ(44), 10kΩ (33)
77
2
Condensatore poliestere, valore: 100nF
22
3
Sensore (TX & RX) infrarosso a forcella
11
4
Diodo Led bianco alta luminosità
11
5
Integrato LM393
11
6
Zoccolo per integrato, 4+4pin
11
7
Transistor BC337, configurazione NPN (8)
8
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
18
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
H-Bridge Motori
Si vuole descrivere il funzionamento del sistema scelto per il pilotaggio dei nostri motori in
DC. Abbiamo progettato degli H-BRIDGE non integrati (come esistono in commercio) con
dei relè 12V DC e transistor. Di seguito sarà riportato lo schema con relativa spiegazione
del suo funzionamento.
Partendo dal connettore di alimentazione J1 troviamo subito un ramo con R1 e LED1, questo
led sarà sempre acceso nel momento che tutto il circuito è alimentato (sopra è
rappresentato solo uno schema dei 4 motori necessari, il led si riferisce a tutto il sistema
completo di 4 H-BRIDGE), se il led è spento ciò significa che non arriva tensione al
sistema.
Per il dimensionamento di R1 si è utilizzata la legge di Ohm: , avendo però il led a cui cadono
circa 2V e assorbe una corrente di circa 10mA la formula sarà:
Dopo di che, troviamo un fusibile da 500mA, questo ci sarà utile per la protezione del vero
sistema H-BRIDGE per non incorrere a cortocircuiti, che saranno protetti da questo
fusibile. Si è scelto 500mA in quanto il motore più grosso sotto sforzo assorbe quasi
600mA.
Dopo il fusibile c’è un altro ramo con un led sempre rosso, questo per vedere che arriva
tensione al sistema H-BRIDGE. Qui abbiamo inserito una resistenza più piccola di 1k
perché si voleva che il led fosse più visibile degli altri.
Troviamo due pulsanti nel sistema e grazie a questi, si potrà andare a manovrare la direzione
dei motori manualmente: sono stati inseriti perché in fase di montaggio sono stati utili per
sistemare le posizioni di carrello e scaffali nel modo migliore e ottimale.
Passiamo ora al vero funzionamento:
Quando nel connettore J3, che deriva da due Pin dell’Arduino di comando, arriva un
comando per il Q1, questo conduce e porta tensione al diodo D1 che, a sua volta, alimenta
un rele’ che sarà in grado di commutare per alimentare in un verso il motore DC. Il transistor
Q2 è interdetto e non conduce, quindi non fa commutare il relè 2 e un pin del motore va
verso massa. Se su J3 si attiva l’altro Pin allora il ciclo si rovescia e il motore cambia verso.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
19
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Perché sono stati utilizzati i relè: se applichiamo una tensione costante ad un motore in DC
e poi gliela togliamo bruscamente dopo un tempo T, il motore avrà una piccola inerzia, ossia
compie altri giri attorno al suo asse.
Questo fenomeno in questo progetto non deve assolutamente verificarsi perché un motore
deve fermarsi in una precisissima posizione e non avere margini di errore (il sistema si
sfaserebbe tutto). Il relè è in grado di mettere in corto i due poli del motore in modo
simultaneo ed evitare il verificarsi dell’inerzia, comportandosi così anche da freno motore.
Perché si è inserita la resistenza da 39k : quando l’Arduino invia un segnale ad un transistor,
quindi farà girare il motore in un certo verso, abbiamo detto che l’altro è interdetto. Proprio
per il transistor interdetto serve la resistenza (R8, R10) da 39k verso massa che tiene il
transistor a massa per evitare che intercorrono tensioni nel transistor e lo portino in
conduzione.
Abbiamo detto che sono presenti 4 H-BRIDGE. Uno di questi serve per comandare un
motore molto piccolo per l’asse Z che avrebbe una tensione di lavoro pari a 3V che per noi
sono tanti considerando il lavoro che deve svolgere. Perciò abbiamo inserito un circuito che
ci fornisce in uscita 1,5V.
Classico circuito di un regolatore di tensione variabile grazie all’integrato LM317. Abbiamo
una tensione di ingresso di 12V e una Vout=1,5V.
C1 (in) e C2 (out) sono condensatori per l’eliminazione dei disturbi che possono arrivare al
sistema.
Rappresentazione 3D del PCB
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
20
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Master
Lista Componenti
N°
DESCRIZIONE MATERIALE
QTA’
1
Resistenza 1/4 Watt, valori: 1kΩ(12), 10kΩ (16), 39kΩ (8), 220Ω (1)
37
2
Trimmer lineare monogiro, montaggio orizzontale, valore 4,7kΩ (1)
1
3
Condensatore elettrolitico, voltaggio: 50V, valore: 10uF (2)
2
4
Diodo 1N4007 (8)
8
5
Diodo led bianco alta luminosità (8)
8
6
Diodo led rosso (5)
5
7
Transistor BC337, configurazione NPN (8)
8
8
Relè 12V, singolo scambio (8)
8
9
Integrato tipo TO-220, LM317 (1)
1
10
Pulsante da circuito stampato (8)
8
11
Fusibile 350mA (5)
5
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
21
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
MOTORE DC
Il motore in corrente continua è costituito principalmente da due parti:
- Statore;
- Rotore.
STATORE: parte fissa del motore che crea un campo magnetico costante;
ROTORE: parte mobile del motore che include le spire.
Perchè il motore si muove?
Il principio base del motore elettrico è quello di una spira percorsa da corrente e immersa in
un campo magnetico costante e per la legge di Faraday “un conduttore di lunghezza L e
percorso da una corrente I, immerso in un campo magnetico B è sottoposto ad una forza
pari a: f=L*I*B”.
Il tipo di motore utilizzato da noi è il motore in corrente continua a magneti permanenti.
questo tipo di motore presenta sullo statore due magneti permanenti e non necessita di
circuiti di eccitazione.
Caratteristiche:
- Può sviluppare una forte coppia a basse velocità;
- Ha un comportamento reversibile: non assorbe solo corrente ma può generarla. si
collega un altro motore all’albero e il primo diventa come una dinamo;
- Può funzionare anche come freno.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
22
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
ASSE X
Come abbiamo visto ci sono 3 assi più il nastro. Andremmo ora a descrivere il primo asse
ossia l’asse X in tutti i suoi dettagli.
Meccanica Generale
Abbiamo bisogno non solo di elettronica per il progetto ma di molta meccanica e ogni asse
ha la sua nello specifico.
Questo asse avrà come parte principale un motore in DC che fa girare una cinghia di
plastica.
Abbiamo preso un motore DC (12V) e ci abbiamo adattato un perno dentato per una
cinghia di plastica recuperata da una vecchia stampante e avrà la funzione di portare avanti
e indietro un unico carrello che sostiene poi tutti gli altri due assi (Y-Z).
Questa cinghia che gira grazie al motore è poi attaccata su un punto preciso del carrello
per farlo muovere. Il carrello si muoverà su due binari (uno per lato) e per fare questo
abbiamo fatto quattro fori nei 4 lati del carrello, dove sono state inserite delle viti che
sosteranno dei cilindretti di plastica per far si che il carrello scivoli bene sui binari.
Il sistema di movimento molto facile e “veloce” da montare e la lunghezza totale del
movimento per l’asse X è di circa 50-55cm.
Elettronica Asse X
Di elettronica non c’è più quasi niente da dire ma solo da fare un riassunto per ogni asse e
capire per ogni asse cosa serve.
Schemi a blocchi
MOTORE
ALIMENTAZIONE
ARDUINO UNO
RS 485
A - B RS485
FOTOCELLULE
I segnali “A - B RS485” sono comuni a tutti i microcontrollori dotati di adattatore seriale
con RS485.
L’alimentazione proviene da quella generale che alimenta tutte le schede: 12V DC.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
23
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Schemi
Per l’asse X ci sarà utile un ARDUINO UNO, un H-BRIDGE e 7 fotocellule a infrarosso.
- ARDUINO UNO:
Sarà utile per la programmazione e il controllo di tutti i movimenti che questo asse
sarà in grado di compiere. Sopra all’Arduino sarà impegnata un circuito elettrico
composto da vari componenti.
Schema Arduino Uno:
Sono stati scelti delle uscite
per pilotare i vari
sensori e motori (PWM). In più
sono presenti i Pin TX,
RX e CT che servono per la
comunicazione seriale
tramite il BUS RS485. Si
utilizzerà l’uscita 5V
dell’Arduino per alimentare il
MAX485 e GND sarà comune
sia quella dell’Arduino sia al
circuito che
monterà sopra di esso.
Schema del circuito montato sopra ad Arduino:
Si vede che è presente il circuito per l’adattatore seriale RS285 (spiegato nel paragrafo
sopra). Abbiamo aggiunto un piccolo circuitino formato da un fusibile di protezione per
eventuali cortocircuiti, una resistenza e un led. Ovviamente la resistenza è stata
dimensionata per la protezione del diodo led con la legge di Ohm. Questo led ci segnalerà
la presenza tensione in tutto il circuito. Per il MAX485 bisogna specificare che i jumper non
devono essere inseriti per la comunicazione.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
24
!
I.I.S. EINAUDI - SCARPA
-
MATURITA’ 2015
FOTOCELLULE A INFRAROSSO:
Qui sono rappresentati in 7 sensori a infrarosso utilizzati nell’asse x. Uno di questi è
situato nella posizione 0 ossia posizione di riposo o di partenza/arrivo e sarà anche
in grado di scaricare il materiale nel nastro trasportatore.
Gli altri 6 sensori sono impiegati per poter fermare il carrello esattamente nelle
posizioni della scaffalatura.
Quando le fotocellule sono a riposo è come se il segnale fosse collegato a massa
quindi risultano un circuito chiuso proprio verso massa. La fotocellula F7 funziona
all’inverso, nel senso che rimane molto più aperta che chiusa. In poche parole
quando il magazzino è a riposo questa fotocellula è come se fosse un circuito aperto
perché il carrello le è davanti. Mentre le altre saranno come un circuito chiuso ma
quando il carrello inizierà a muoversi allora passando davanti alle singole fotocellule
queste diventeranno come un circuito aperto e non appena il carrello si sposterà da
essa ritornerà come un circuito chiuso.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
25
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Master
Lista Componenti
N°
DESCRIZIONE MATERIALE
QTA’
1
Resistenza 1/4 Watt, valori: 1kΩ(1), 120Ω (3)
4
2
Jumper, 3x2
3
3
Integrato MAX485
1
4
Zoccolo per integrato, 4+4 pin
1
5
Diodo led bianco alta luminosità
1
6
Diodo led giallo
1
7
Fusibile 350mA
1
8
Porta fusibile
1
9
Connettore a vite 2poli, passo 2,5mm
4
10
Connettore a vite 10 poli, passo 2,5mm
1
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
26
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
ASSE Y
In realtà cambia poco dall’asse X (precedente), ma sono stati utilizzati dei componenti e un
motore diverso.
Meccanica Generale
Si è recuperato un binario di una stampante per fare il sistema di movimento dell’asse che è
poi sostenuto dal carrello dell’asse X.
In questo binario è presente una cinghia di plastica che gira grazie ad un motorino DC
comandato a 12V e si muoverà grazie ad un perno dentato fissato sul motore.
È stato importante fissare un sistema di bloccaggio per il binario perché essendo alto circa
35-40cm deve essere molto stabile per non incorrere ad errori nel movimento. Si è fissata
una barra di ferro tra il punto più alto del binario e sul carrello dell’asse X.
Elettronica Asse Y
Potremmo dire che l’elettronica è uguale all’asse X, ma qualche variazione è presente,
soprattutto perché in questo asse sono presenti 4 fotocellule infrarosso, un led e un
buzzer di segnalazione di carrello in movimento (che riguarda tutto il magazzino ma per
comodità è stato inserito in questo asse). Abbiamo creato un circuito stampato
posizionato sul carrello dell’asse X che servirà per la comunicazione tra gli assie i
connettori flat. Questo circuito conterrà anche il circuito per la segnalazione del led e
buzzer. Precisiamo che il microcontrollore ARDUINO di questo asse è stato impiegato
anche per l’asse Z viste le molte uscite per poter pilotare il necessario.
Schemi a blocchi
ALIMENTAZIONE
MOTORE
ARDUINO UNO
RS 485
A - B RS485
FOTOCELLULE
I segnali “A - B RS485” sono comuni a tutti i microcontrollori dotati di adattatore seriale
con RS485.
L’alimentazione proviene da quella generale che alimenta tutte le schede: 12V DC.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
27
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Schemi
- ARDUINO UNO:
Schema Arduino Uno:
In questo schema bisogna precisare che saranno presenti solo i collegamenti per
l’asse Y. Quelli per l’asse Z saranno presenti nel paragrafo successivo.
A destra il circuito per l’adattatore seriale e a sinistra i pin dell’Arduino Uno che
comanda l’asse Y e Z.
- FOTOCELLULE INFRAROSSO:
Come ogni asse, queste sono le fotocellule
a infrarosso per l’asse Y. Sono 4, una per
riga del magazzino.
Quando il carrello sarà arrivato nella
posizione dell’asse X giusta allora il carrello
verticale che già si stava alzando arriverà
davanti al sensore della riga selezionata
tramite l’ordine e quando si fermerà allora si
azionerà anche l’asse Z.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
28
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Master
Lista Componenti
N°
DESCRIZIONE MATERIALE
QTA’
1
Resistenza 1/4 Watt, valori: 1kΩ(1), 120Ω (3)
4
2
Jumper, 3x2
3
3
Integrato MAX485
1
4
Zoccolo per integrato, 4+4 pin
1
5
Diodo led bianco alta luminosità
1
6
Diodo led giallo
1
7
Fusibile 350mA
1
8
Porta fusibile
1
9
Connettore a vite 2poli, passo 2,5mm
4
10
Connettore a vite 10 poli, passo 2,5mm
1
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
29
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Comunicazione tra gli assi
Abbiamo creato un circuito posizionato sopra il carrello per poter fare il collegamento tra i
vari assi con gli opportuni connettori utilizzati.
Inoltre, è stato inserito un circuito con l’NE555 per l’attivazione di un segnale ottico (led) e
un segnalatore acustico (buzzer) quando il magazzino sarà in movimento.
Schema a blocchi del circuito:
SCHEDA
H-BRIDGE
-
CONNETTORE
A VITE
MOTORE Y
SENSORI Y
CONNETTORE
SMD FLAT
ASSE Z
-
CIRCUITO
NE555
- MOTORE Z
- FINE CORSA
BUZZER
LED
Schema comunicazione assi
Schemi
Tipo connettore: 28 pin per flat plastico recuperato
da stampante.
Il connettore arriva direttamente dalla scheda degli
H-BRIDGE e porta i segnali per le fotocellule e i
comandi dei motori di asse Y e Z. Alcuni segnali
arrivano direttamente dalla scheda degli
H-BRIDGE (come l’alimentazione e i comandi dei
motori) mentre altri passano solo per quella scheda,
ma arrivano dagli Arduino (come il comando per il led
e buzzer oppure i segnali per le fotocellule ad infrarosso).
L’alimentazione è comune alla scheda degli HBRIDGE ma non alle schede di Arduino.
Mentre il connettore a destra è quello a vite che porta
i segnali alle fotocellule dell’asse Y e i comandi per il
motore Y, e il comando del led posizionato sopra al
carrello. Tipo connettore: a vite 10 pin.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
30
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Tipo connettore: SMD per flag plastico
recuperato da stampante.
Porta i segnali all’asse Z e il pilotaggio per il suo
motore.
I comandi arrivano dagli Arduino tranne il
comando del motore che arriva dalla scheda
degli H-BRIDGE.
L’NE555 ci produrrà un lampeggio del led e un
suono che varia per il buzzer.
Abbiamo dimensionato il circuito per una
configurazione da astabile dove il comando
arriva dall’Arduino uno. Se questo invia a CL un
comando positivo allora il transistor condurrà e
il 555 inizierà a lavorare, altrimenti non andrà in
conduzione il transistor e tutto rimane a riposo.
Dimensionamento:
R1: protezione led
R5: tenere a massa il transistor quando non conduce
R2//R3: perché non esiste una R=5k.
Le formule sono già complete dei dati, ma sono state dimensionate le resistenze per ottenere TH=0,3sec e
TL=0,15sec.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
31
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Master
Lista Componenti N°
DESCRIZIONE MATERIALE
QTA’
1
Resistenza 1/4 Watt, valori: 10kΩ(3), 39kΩ (1), 1kΩ (1)
5
2
Switch integrato
1
3
Integrato NE555
1
4
Zoccolo per integrato, 4+4 pin
1
5
Buzzer acustico
1
6
Transistor Bc337, configurazione NPN
1
7
Condensatore elettrolitico, 22uF, voltaggio: 50V
1
8
Condensatore poliestere, 100nF
1
9
Connettore a vite 8 poli, passo 2,5mm
1
10
Connettore flat 28pin
1
11
Connettore SMD flat 23pin
1
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
32
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
ASSE Z Meccanica Generale La meccanica è molto semplice ossia che sul carrello dell’asse y è presente un contenitore
di plastica con un sistema di movimento per il motore.
È stato recuperato un pezzo da una vecchia stampante con un motorino già presente con
tensione di lavoro a 1,5V.
Su questo pezzo è stata fissata una L di alluminio che funge da “forca” per prelevare i
bancali nelle varie postazioni.
Elettronica Asse Z Schema a blocchi
H-BRIDGE
ALIMENTAZIONE
MOTORE Z
ARDUINO UNO
RS 485
FINECORSA
L’elettronica comprende:
- Scheda Arduino Uno;
- Scheda H-BRIDGE;
- Scheda connettore finecorsa e motore.
Schemi
NC1: contatto normalmente chiuso del primo finecorsa;
NC2: contatto normalmente chiuso del secondo
finecorsa;
IN-A MOTORE: ingresso A o comando A del motore;
IN-B MOTORE: ingresso B o comando B del motore;
CL: comando del led di segnalazione magazzino in
movimento;
CT: segnale RS485;
TX: segnale del trasmettitore RS485;
RX segnale del ricevitore RS485.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
33
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Come abbiamo detto il motorino per
far andare dentro e fuori l’asse Z è
alimentato a 1,5V quindi ci è stato
necessario inserire un piccolo circuito
che ci regolasse la tensione da 12V a
1,5V ed è il seguente. Per il funzionamento dell’H-BRIDGE
è analogo a tutti gli altri assi. A
seconda della provenienza del
segnale, esso girerà in un senso
anzichè nell’altro.
L’asse Z presenta un circuito stampato banale costituito da due connettori. Uno, il più
grande è un connettore SMD recuperato da una vecchia stampante con il suo flat di fili, e
questo comunicherà con il circuito intermedio di comunicazione tra assi; Mentre l’altro
connettore, il più piccolo, è un connettore a vite di 8 pin e da questo escono le varie uscite
per i finecorsa e i segnali del motore.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
34
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Master
Lista Componenti N°
DESCRIZIONE MATERIALE
QTA’
1
Connettore a vite 8 poli, passo 2,5mm
1
2
Connettore SMD flat 23pin
1
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
35
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
NASTRO TRASPORTATORE Meccanica Generale Il meccanismo di funzionamento di questo nastro è la meccanica più complessa di tutto il
progetto. Per poterlo costruire abbiamo recuperato dei pezzi da delle vecchie stampanti e
dei pezzi di alluminio. Per prima cosa abbiamo costruito due pezzi di alluminio a forma di L
per il sostegno anche se poi risulterà sospeso dalla base.
Sono state necessarie poi due barre di ferro della lunghezza di circa 5cm per poter tenere il
nastro che è formato da un foglio di cartavetrata.
Sui perni di ferro sono stati inseriti dei cilindri di gomma semidura per far scorrere bene il
nastro, ma in modo che non scivoli troppo. Infine, i due perni con dei supportini in plastica
sono stati fissati alla base di legno dietrostante al nastro. Nella staffa a L è stato fissato il
motore a 12V che permetterà il movimento del nastro.
Questo movimento è permesso grazie a due ingranaggi, uno più piccolo fissato sul perno
del motore mentre uno più grande fissato sul perno del nastro.
Elettronica Nastro È presente solo l’H-BBRIDGE per il comando dei motori che arrivano poi da un Arduino Mega.
Sarà poi presente un sensore a infrarossi ma non ha un circuito di condizionamento in
quanto viene pilotato direttamente dall’Arduino: un’uscita piloterà un led a infrarosso con
una frequenza di 38kHz, questo perchè se noi facessimo emettere luce al diodo in modo
continuo la luce solare o ambiente potrebbe creare problemi. Poi ci sarà un ingresso
dell’Arduino che capta il segnale ricevuto dal sensore e sarà in grado di effettuare le
appropriate funzioni.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
36
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Schema a blocchi
ALIMENTAZIONE
ARDUINO MEGA
H-BRIDGE
MOTORE
NASTRO
L’Arduino invia i dati all’H-BRIDGE del nastro trasportatore e nel momento adatto
quest’ultimo darà in consenso al motore per poter andare avanti, quindi portare il bancale
in posizione di scarico o indietro, quindi in posizione di carico.
Lista Componenti
N°
DESCRIZIONE MATERIALE
QTA’
1
Led emettitore a infrarosso
1
2
Sensore ricevitore a infrarosso
1
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
37
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
CENTRALINE DI COMANDO
In questo progetto sono presenti due centraline (Arduino Mega 2560) che comanderanno
il tutto. Le altre non sono meno importanti, ma tutti i dati partono da queste due,
nonostante siano presenti i programmi più sostanziosi per il controllo di tutto il sistema.
Centralina Principale
Questa centralina principale ha il compito di comandare una tastiera di 12 pulsanti e un
display LCD 20x4. Da qui partiranno tutte le informazioni che poi saranno visualizzate nel
display. Sarà possibile, tramite tastierino, andare a fare tutti i movimenti che poi saranno a
sua volta visualizzati nell’LCD. Oltre ad avere il controllo del display e del tastierino,
questa centralina avrà il compito di comunicare, tramite il BUS, tutte informazioni alla
centralina secondaria che poi darà il comando a tutti gli altri microcontrollori.
Andiamo ad esaminare come è costituita questa parte e il suo funzionamento.
Tastierino e Display LCD
Il tastierino è composto da 12 pulsanti (NO: normalmente aperti), che ci consentiranno di
agire per far fare al progetto i suoi movimenti.
Abbiamo applicato un display LCD 20x4 dopo aver studiato il progetto a carta e capito
che sarebbero servite tali colonne e tali righe.
Il display avrà un trimmer collegato per poter variare il contrasto per la luminosità.
Rappresentazione dello schema riferito al display
LCD. Si nota il trimmer collegato tra i vari Pin del
display per variare il contrasto luminoso. I pin
nominati da un numero rosso andranno poi a
collegarsi con il microcontrollore.
Dati LCD:
Alimentazione: +5V
Tabella riferimento Pin del displayLCD
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
38
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Piedinatura del connettore che sarà collegato all’Arduino Mega: Il connettore è di tipo a vaschetta di 26pin con l’apposita piattina sempre di 26 fili. Schema dei 12 pulsanti NO.
Quando viene premuto il pulsante viene chiuso il circuito su di esso e viene inviato
un impulso al microcontrollore. Sopra è riportato lo schema elettrico di come è collegato il nostro Arduino Mega. È
presente un connettore chiamato “Seriale” che sarà necessario per far comunicare questo
Arduino Mega con l’altro Arduino Mega.
Infine il connettore che abbiamo già riportato nella pagina precedente per potersi collegare
e portare i segnali al display LCD e ai 12 pulsanti.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
39
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Come in ogni circuito che abbiamo fatto, anche in questo è presente quello di protezione e
di alimentazione:
J4: 5V OUT (collegato all’Arduino)
J5: 12V IN (dall’esterno) J6: 12V OUT (dopo il fusibile)
Il led segnala la
presenza
tensione nel circuito.
Alcune immagini in 3D, ricavate dal software, dei circuiti stampati per questa sezione:
Lista Componenti N°
DESCRIZIONE MATERIALE
QTA’
1
Diodo Led rosso
1
2
Resistenza 1/4 Watt, Valore: 1kΩ
1
3
Fusibile 350mA (1) con portafusibile da circuito stampato (1)
2
4
Connettore a vaschetta 26 pin
2
5
Connettore a vite 2 poli passo 2,5 mm (3), connettore a vite 4 poli passo 2,5 mm (1)
4
6
Pulsanti (NO) da circuito stampato
12
7
Trimmer monogiro orizzontale, Valore: 4,7kΩ
1
8
Display alfanumerico LCD, 20x4
1
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
40
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Master Arduino Controller Master Tastierino e Display LCD
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
41
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Funzioni da Tastierino
Tramite tastierino è possibile navigare in un menù.
Andiamo ora ad analizzare proprio questo menù e come poterci navigare dentro.
MENU’ PRINCIPALE
NUOVO ORDINE
NUOVO ORDINE
Si digita il codice corrispondente allo scaffale da prelevare il materiale desiderato.
DIGITARE CODICE
Viene visualizzato un riepilogo del codice selezionato con relativa descrizione con richiesta di conferma. Se si avesse sbagliato basta premere ESC.
Viene chiesto di selezionare la quantità da prelevare. Viene visualizzata la quantità massima disponibile del prodotto.
Confermare Prodotto?
Codice: X
Descrizione Prodotto
Quantità: X
Quantità Disponibile: X
Con un riepilogo di prodotto, codice e quantità viene chiesta conferma per il proseguo.
È presente l’opzione selezione di più ordini in successione. Questo è possibile premendo OK dopo questa domanda. Se premo ESC allora il sistema inizia la sua funzione.
- Conferma Prodotto X Prodotto nr. X
Codice
Prodotto: X
Quantità: X
Ordinare altri Prodotti?
Avvio Sistema
BASSO RICCARDO
Ripetizione Ciclo
MAGAZZINO AUTOMATICO
! di 59
42
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Centralina Secondaria Questa centralina avrà il compito di prelevare le informazioni eseguite dall’utente sul
tastierino e farle eseguire.
Tutti gli ordini, le modifiche e gli errori passano per questa centralina.
È stato utilizzato un altro Arduino Mega in quanto il primo per il Centralino principale il
programma è molto sostanzioso e non si voleva caricarlo di ulteriore flusso di programma.
Dispone di un MAX485 per la comunicazione seriale con i motori e fotocellule. Mentre viene
utilizzata la UART per la comunicazione con il tastierino.
Schemi
Lo schema sopra riportato rappresenta i collegamenti effettuati per questo microcontrollore.
Presenta un connettore J7 per collegare i due fili del motore che muove il nastro trasportatore.
Abbiamo poi la classica alimentazione dei 5V (presente nello schema sottostante), il connettore J9
serve per comandare la fotocellula del nastro trasportatore, J3 verrà collegato con la UART del
microcontrollore della centralina principale. Mentre J8 serve per la comunicazione dei
microcontrollori dei motori per i vari assi.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
43
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Nello schema a fianco abbiamo l’adattatore
seriale del MAX 485.
Presente anche i connettori di alimentazione del
circuito con relativo fusibile da 500mA di
protezione e il diodo led per la segnalazione
della presenza tensione.
Master Lista Componenti N°
DESCRIZIONE MATERIALE
QTA’
1
Diodo Led rosso
1
2
Resistenza 1/4 Watt, Valore: 1kΩ
2
3
Fusibile 350mA (1) con portafusibile da circuito stampato (1)
2
4
Jumper 3x2
3
5
Connettore a vite 2 poli passo 2,5 mm
4
6
Diodo Led giallo
1
7
Resistenza 1/4 Watt, Valore: 120Ω
3
8
Integrato MAX485
1
9
Zoccolo per integrato, 4+4pin
1
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
44
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
ALIMENTATORE 12V - 4A
Il progetto sarà alimentato da una singola tensione continua 12V e da una corrente costante
di 4A. In realtà tutto il sistema non assorbirà 4° ma è stata fatta una prevenzione per poi
non trovarci in casi in cui possano servire più Ampere.
Avremmo quindi il nostro alimentatore composto principalmente da 4 stadi:
- Trasformatore;
- Ponte a diodi;
- Filtro capacitivo;
- Regolatore di tensione fisso.
Schema a blocchi
TRASFORMATORE
PONTE A DIODI
FILTRO
REGOLATORE
Tensione di rete: 230V AC 50Hz
Tensione di uscita: 12V DC
Corrente di uscita: 4A
Il Trasformatore
Il trasformatore è un dispositivo elettronico che si basa sul campo magnetico.
È formato da due avvolgimenti di spire metalliche e in base al numero di spire tra
avvolgimento primario e avvolgimento secondario da origine al rapporto per il
dimensionamento del trasformatore.
Sul primario solitamente si ha una tensione di 230V AC (se si parla di tensione di rete
50Hz), mentre sul secondario bisogna dimensionarlo o meglio sceglierlo in base alle
necessità.
Noi prenderemo un trasformatore con le seguenti caratteristiche:
- Tensione: 18V
- Corrente: 5A
- Potenza: 90VA
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
45
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
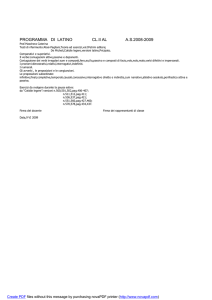
Ponte a Diodi
Descriviamo ora il raddrizzatore a doppia semionda che è costituito da un ponte di diodi
(Ponte di Graetz) come riporta la figura:
Nella semionda positiva (quindi quella che presenta valori positivi di V2M) abbiamo che i
diodi D1 e D3 sono polarizzati direttamente ed entrano in conduzione mentre i diodi D2 e
D4 non conducono e per questo la tensione sul carico sarà uguale alla tensione sul
secondario del trasformatore.
Nella semionda negativa il comportamento dei diodi si inverte e per tanto la tensione sul
carico sarà uguale ma con segno opposto rispetto a quella del secondario del
trasformatore.
Nell’immagine soprariportata sono presenti 4 grafici:
- in alto a sinistra: andamento nel tempo del segnale dopo il trasformatore quindi la
tensione del secondario.
- In basso a sinistra: andamento nel tempo delle semionde positive dopo il
raddrizzatore a doppia semionda con valore massimo uguale a quello della tensione
ai capi del secondario del trasformatore. A1 e A2 sono le aree della semionda
positiva e sono state contrassegnate perché sono utili per capire quanto vale la
tensione dopo il raddrizzatore:
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
46
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
- In alto a destra: rappresentazione della tensione del secondario (serve per
riferimento del grafico successivo)
- In basso a destra: possiamo vedere le semionde positive. La cosa che si vuole
dimostrare è che i diodi tolgono una certa tensione che poi in uscita del ponte non
c’è. Visto che abbiamo utilizzato un ponte a doppia semionda la tensione da togliere
sarà 0.7V*2=1,4V questo perché il ponte a singola semionda toglie 0,7V ma a doppia
bisogna raddoppiare.
Alla fine si avrà che: VL=V2M - 1,4V
Il Filtro
Ora che sono state tagliate le semionde negative bisogna filtrare il segnale per livellarlo e
ottenere una tensione lineare e stabile.
Si usa quindi un condensatore di filtro: C=4700uF. Questo valore è stato scelto perché per
normalità si scelgono 1000uF per ogni Ampere ci corrente, noi abbiamo 4 Ampere quindi
prendiamo il valore commerciale di condensatore elettrolitico di 4700uF.
Con la prima immagine sottostante indichiamo con il diodo che funge da ponte
raddrizzatore, mentre il condensatore è il nostro filtro e la RL è il carico.
Quando il diodo conduce allora il condensatore si carica accumulando cariche che poi
rilascerà per alimentare il circuito. Mentre quando i diodi non conducono il condensatore
rilascia le cariche e provvede ad alimentare il circuito.
Quello di figura sottostante rappresenta l’andamento nel tempo della carica e scarica del
condensatore.
- VM: Valore massimo positivo di tensione;
- - VM: Valore massimo negativo di tensione;
- VC: Tensione del condensatore;
- VCmin: Valore minimo a cui arriva la tensione del condensatore;
- VCmax: Valore massimo a cui arriva la tensione del condensatore.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
47
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Il condensatore inizia a scaricarsi sul carico RL con un andamento esponenziale
caratterizzato da una costante di tempo. E’ ovvio che tale scarica sarà tanto più lenta
quanto maggiore è la costante di tempo .
La scarica prosegue per tutto il tempo in cui la V2 sarà inferiore alla VC , ma non appena la
V2 , tornando ad aumentare, supererà il valore di VC il diodo ritornerà a condurre
ricaricando nuovamente il condensatore.
Possiamo definire allora l’ondulazione residua ossia il RIPPLE:
L’ondulazione residua è proprio quell’andamento di carica-scarica del condensatore che
livella in maniera non perfetta la tensione uscente dal diodo.
Regolatore di Tensione
Abbiamo bisogno ora di una tensione stabilizzata e fissa di 12V.
Utilizziamo quindi un regolatore di tensione fisso 7812.
Il circuito è il seguente:
C3 e C4: filtri per disturbi e per livellare meglio la
tensione di ingresso e di uscita dallo stabilizzatore di tensione.
Vin: tensione in uscita dal ponte del condensatore
di filtro.
Vout: tensione di uscita dello stabilizzatore.
È stato aggiunto un transistor PNP per aumentare la portata in corrente. E’ stato utilizzato
un PNP perché lavoriamo per tensioni positive e non negative.
La resistenza R5 serve di polarizzazione del transistor perché su di essa passerà una
minima corrente così come nel 7812 perché quasi tutta la corrente passerà per il transistor
per far lavorare a carichi grossi il transistor e non sollecitare a sforzi l’integrato 7812.
La resistenza è stata dimensionata conoscendo l’hFE del transistor, la corrente di base del
transistor e la tensione VEB sempre del transistor.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
48
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Spiegazione dello schema totale dell’alimentatore
Questo sopra è lo schema completo fino all’uscita stabilizzata in tensione di 12V.
Il diodo led D3 si accenderà quando sarà presente la tensione e ogni blocco è stato prima
spigato nel dettaglio quindi ora non c’è niente da aggiungere tranne un circuito aggiuntivo
che è il seguente:
E’ stato utilizzato un relè a doppio scambio per poter comandare le due uscite presenti.
Quando è presente la tensione l’uscita del connettore J2 è attiva e questa sarà sempre
attiva perché sarà l’uscita che andrà a comandare le schede di controllo.
Mentre l’uscita del connettore J3 è sempre attiva ma è possibile interromperla premendo il
pulsante di emergenza (quello normalmente chiuso), in questo modo il relè si dissecita e
non porterà più tensione all’uscita.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
49
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Master Lista Componenti N°
DESCRIZIONE MATERIALE
QTA’
1
Diodo Led rosso
5
2
Resistenza 1/4 Watt, Valore: 820Ω
5
3
Fusibile 5A
3
4
Portafusibile da circuito stampato
3
5
Connettore a vite 2 poli passo 3,5 mm
5
6
Connettore a vite 3 poli passo 3,5 mm
1
7
Resistenza 5W, valore: 100Ω
1
8
Transistor di potenza TIP29, configurazione PNP
1
9
Relè doppio scambio
1
10
Condensatore elettrolitico , voltaggio 50V, valore 4700uF
1
11
Condensatore elettrolitico, voltaggio 50V, valore 1000uF
2
12
Condensatore poliestere, valore: 100nF
1
13
Condensatore elettrolitico, valore: 330nF
1
14
Ponte a diodi
1
15
Integrato tipo TO220, regolatore di tensione 78L12
1
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
50
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
COLLEGAMENTO CON LE MATERIE INGLESE
This project is based on automation, which is a process that reduces the work of the
human person, and it is controlled by man through electronic system such as computers.
Now a days electronic is very important to help people every day also with small things, for
example automated system are based on electronic.
In my project, i use both wired and programmable electronics.
I control the computer and send this data to the electronics wired that will run the
automation; Microcontroller are used to control system function.
If there are errors on automation we require the presence of the human person to fix it.
But the presence of human person is indispensable, because if there are mistakes they can
correct them.
This is a possible block diagram for an automated control system:
HUMAN
PERSON
COMPUTER
MICROCONTROLLER
AUTOMATED
SYSTEM
The feedback is sending data and often errors from a device to another. In our case the
feedback is sent from the microcontroller to the computer.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di !59
51
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
ELETTRONICA
Nel progetto è stato utilizzato l’integrato NE555, che serve per generare delle forme
d’onda. Ci è servito per pilotare un buzzer e un led che entravano in funzione solo quando
il magazzino era in fase lavoro.
Durante l’anno scolastico è stato affrontato l’argomento dei generatori di forme d’onda
tramite vari dispositivo, tra questi anche l’NE555.
Con questo tipo di integrato si possono generare onde del tipo:
- Onda quadra con DC%=50%;
- Onda quadra con DC%<50%;
- Onda quadra con regolazione del DC%;
Esistono però due configurazioni: ASTABILE e MONOSTABILE.
- ASTABILE: il 555 funziona da oscillatore e non ha bisogno di clock esterni.
- MONOSTABILE: il 555 si attiva solo se all’ingresso (pin2) riceve un impulso di clock
e riconosce i fronti di discesa.
Onda quadra con DC%=50% -> ASTABILE
Genera un onda quadra di ampiezza A con DC=50% ciò significa che il tempo di salita TH
corrisponderà al tempo di discesa TL.
Il circuito è il seguente:
Le formule:
In questo caso le resistenze saranno di ugual valor perché il TH è uguale al TL. Quindi la formula per calcolare i tempi sarà:
TH= TL= ln2*R2*C
Mentre la formula per il periodo completo
è: T= ln2*(R1+2*R2)*C
Onda quadra con DC%<50% -> ASTABILE
Genera un onda quadra con ampiezza A con DC<50% ciò significa che il tempo di salita TH
non corrisponderà al tempo di discesa TL.
Il circuito è il seguente:
Andamento temporale: (nero: carica-scarica C
rosso: segnale uscita).
BASSO RICCARDO
TH= ln2*(R1+R2)*C
TL= ln2*R1*C
MAGAZZINO AUTOMATICO
! di 59
52
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Onda quadra con regolazione del DC%-> ASTABILE
Il condensatore C si carica attraverso la
resistenza R1 e il diodo D1, quindi il tempo di
carica vale: TC= ln3*(R1+R’)*C
Mentre la scarica avviene tramite R2 e D2,
quindi il tempo di scarica vale:
TS= ln2*(R1+R’’)*C
Per il calcolo della frequenza avvaliamo di
questa formula: f=1/(TC+TS)
MONOSTABILE Grafico di Vc Grafico dell’OUT
La presenza di C1 è utile per non incorrere a problemi nella durata dell’impulso. Visto che il
pin 5 è un ingresso non utilizzato in questo caso, quindi si mette il condensatore da 100nF
solitamente per proteggere il circuito da disturbi.
Formule di progetto: T= ln3*R1*C R1=T/(ln3*C)
La carica di C avviene attraverso la resistenza R1 e non arriva mai a Vcc ma si ferma al valore
di Vc=(2/3)*Vcc.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
53
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
T.P.S.E
Durante l’anno abbiamo affrontato l’argomento delle comunicazione seriali che sono state
utilizzate in questo progetto per far comunicare le centraline.
Prima di parlare di comunicazione seriale bisogna fare dei cenni ai dei concetti importanti
per la trasmissione dati:
- Seriale: se i dati sono trasmessi attraverso il link un bit alla volta;
- Parallela: se i bit dei dati sono inviati tutti insieme ma servono tanti cavi (uno per bit);
- Full duplex: se il sistema di comunicazione è in grado si ricevere e trasmettere
contemporaneamente;
- Half duplex: se il sistema di comunicazione non è in grado di trasmettere e ricevere
allo stesso tempo;
- Nella trasmissione dei dati si definisce la velocità di trasmissione come BAUD-RATE
[bit/s];
Esistono, allora, due tipi di comunicazione seriale: ASINCRONA e SINCRONA.
Nella comunicazione asincrona non è presente alcuno segnale di clock nella trasmissione
del dato ma il clock viene generato dal ricevitore. Non appena si invia una serie bit, quindi
dei dati, all’inizio e alla fine vengono aggiunti un bit chiamati “start” e “stop” che danno le
informazioni al ricevitore.
Un grosso vantaggio è che il clock tra trasmettitore e ricevitore è separato e quindi si
possono inviare e riceve dati in momenti differenti.
L: è la sigla per l’inizio del carattere
H: è la sigla per la situazione di riposo, quindi senza segnale.
Esistono dei circuiti che gestiscono la comunicazione seriale asincrona, si chiamano UART.
E possibile anche che si verifichino degli errori e quindi bisogna rilevarli:
un metodo è quello dei bit di parità: esso vale uno se il numero del bit con valore uno
compreso il bit di parità è pari, vale 0 se è dispari.
Se però ci sono più di un errore nella trasmissione allora questo metodo non va più bene.
Un esempio di correzione di errore è questo:
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
54
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Criterio di selezione per i sistemi di comunicazione tra i dispositivi:
- Ambiente di lavoro: possono essere ambienti troppo caldi, troppo freddi quindi un
problema di temperatura, oppure luoghi ad alto rischio quindi serve un sistema più
resistenze agli urti, oppure posti che sono facilmente infiammabili oppure per i
disturbi elettromagnetici.
- Tipo e lunghezza della linea: la lunghezza del tratto varia nella scelta del tipo di
conduttore e dispositivo di connessione.
- Dimensioni varie, modalità di cablaggio (se è in un luogo accessibile facilmente
oppure no).
- Numero di dispositivi collegabili.
Per la comunicazione si usano dei mezzi di trasmissione che possono essere cavi o fibre
ottiche. I cavi possono essere coassiali, a coppie twistate ecc. vengono suddivisi per il
numero di conduttori, la sezione dei conduttori e altre caratteristiche.
Solitamente vengono usati cavi con certificazione in grado di garantire ottime prestazioni
anche con il tempo, se si usano cavi non certificati o di bassa qualità si ha il rischio che i dati
possono viaggiare in modo errato. Mentre le fibre ottiche vengono usati per collegare i
ripetitori. Sono immuni ai disturbi elettromagnetici e vengono utilizzate per lunghe tratte
grazie alle loro caratteristiche, ma sono molto più costose dei cavi elettrici.
La linea di trasmissione viene definita come una coppia di conduttori che trasportano il
segnale.
I conduttori come prima spiegato possono essere di vario tipo, scelti in base alle
caratteristiche necessarie per garantire il corretto utilizzo.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
55
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Vari metodi di comunicazione seriale:
Esistono ormai da anni vari metodi di comunicazione seriale che con gli anni si sono evoluti,
alcuni andati persi e altri migliorati, come per esempio:
- RS 232;
- RS 485;
RS 232
RS 485
Diffuso per i PC che ne possiedono sempre una
Standard seriale più diffuso e utilizzato
Limitato dalla connessione punto-punto
Consente la connessione di più dispositivi
Lavora su distanze limitate (15m)
Lavora su lunghe distanze (>4km)
Poco utilizzata nelle industrie
Molto utilizzata nelle industrie
Estremamente sensibile ai disturbi
Possibilità di collegare 32 dispositivi
Esistono la A, B e C che si differiscono per il diverso
voltaggio di lavoro
I segnali vengono trasmessi in tensioni quindi è utile che
esista un equipotenziale tra tutte le linee collegate
Presenta una linea sbilanciata con riferimento a massa
Presenta una linea bilanciata non riferita a massa
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
56
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
MATEMATICA
In molte formule ho riscontato una funzione matematica: il Logaritmo.
Si dice logaritmo del numero “b” in base “a” quel numero “c” che dato come esponente ad a
da' come risultato “b”:
c= logab ⟺ ac = b
E’ importante ricordare il logaritmo naturale ossia quel logaritmo che ha per base il numero
naturale di Nepero: lne dove e vale 2,718…
Se ora noi prendiamo la funzione logaritmica e la rappresentiamo vediamo che:
Per disegnarla ci è servito fare lo studio di una funzione
(argomento trattato anche durante l’anno scolastico):
Dominio -> D: x>0 bisogna porre l’argomento del
logaritmo maggiore di 0.
Intersezione assi: x=1 -> y=0 ; y=0 -> x=1
Sempre dalla stessa funzione possiamo dimostrare la teoria del calcolo integrale:
La funzione di fianco è una funzione
continua e integrabile nell’intervallo [a;b].
Si definisce allora il METODO DELLA
MEDIA INTEGRALE:
Se f(x) è una funzione continua in un intervallo [a;b], esiste almeno un punto x
dell’intervallo tale che:
Geometricamente, se la funzione è positiva in
[a;b], il teorema della media integrale esprime
l’equivalenza fra un trapezoide, la cui area è:
La relazione finale sarà quindi:
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
57
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
L’Integrale Indefinito
La nozione fondamentale del calcolo integrale è quella di funzione primitiva di una funzione
f (x). Tale nozione è in qualche modo speculare alla nozione di funzione derivata di f (x) :
con funzione primitiva di una data funzione f (x) si intende una funzione F (x) che, se
derivata, coincide con la funzione f (x) stessa. Sussiste la seguente definizione di primitiva:
Sia f (x) definita nell’intervallo aperto (a,b). Se esiste una funzione F(x) continua in [a,b] e
derivabile in (a,b) e tale che F‘(x)=f(x)∀x∈(a,b),
la funzione F(x) sarà detta funzione primitiva di f (x).
Definizione di Integrale Indefinito:
Sia f (x) definita in (a,b) e si supponga che essa ammetta primitive. La totalità delle
primitive di f (x) sarà indicata con il simbolo:
che si legge “integrale indefinito di f (x) in dx”. La funzione f (x) sarà detta integrando.
In base alle due proprietà delle primitive appena descritte si avrà, pertanto:
dove F(x) è una qualsiasi primitiva di f (x).
L’Integrale Definito
Si chiama trapezoide una figura piana delimitata del grafico di una funzione f(x) continua in
un intervallo chiuso , dall’asse delle ascisse e dalle rette parallele all’asse delle ordinate di
equazioni x = a e x = b.
Per calcolare l’area di un trapezoide occorre dividere l’intervallo in un certo numero n di
parti uguali di ampiezza x= (b-a)/n e considerare il plurirettangolo inscritto ( costituito
dagli insiemi dei rettangoli aventi per base Δx e per altezza rispettivamente m1, m2, …, mn,
dove mi è il minimo valore assunto dalla funzione f(x) nell’ i – esimo intervallino) e il
plurirettangolo circoscritto (costituito dai rettangoli aventi per base Δx e per altezza M1,
M2, …, Mn, dove rappresenta il massimo valore assunto dalla funzione f(x) nell’ i-esimo
intervallino).
Indicate con sn e Sn rispettivamente le aree del plurirettangolo inscritto e di quello
circoscritto, le successioni: s1, s2, …, sn e S1, S2, …, Sn
Pertanto segue la definizione di INTEGRALE DEFINITO:
Data una funzione f(x) continua in , si chiama integrale definito esteso all’intervallo [a, b] il
valore comune del limite per n→+∞ delle due successioni sn, per difetto, e Sn, per eccesso:
Il numero a si dice estremo inferiore , il numero b estremo superiore . La funzione f(x) è
detta funzione integranda.
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
58
!
I.I.S. EINAUDI - SCARPA
MATURITA’ 2015
Possiamo quindi studiare il calcolo approssimato del calcolo delle aree con vari metodi
studiati durante l’anno:
Metodo dei rettangoli
L’integrazione di f(x) è un modo per calcolare l’integrale definito, utilizziamo quindi il
metodo dei rettangoli:
Consideriamo una funzione f(x) continua in [a, b]; f(x)0 in [a, b].
Dividiamo [a, b] in n parti uguali dove
xo=a, x1=a+h, …, xn=a+nh=b.
Mentre y0=f(a), y1=f(x1), …, yn=f(xn)=f(b).
Nell’immagine si vede che la funzione viene divisa in rettangoli
con la stessa base, mentre l’altezza varia al variare della f(x).
La parte colorata in rosso saranno le nostre y.
La parte verde invece è il completamento del rettangolo formato
dalla parte verde colorata e dalla parte verde a puntini.
Ora calcoliamo l’errore commesso nel calcolo dell’area: En = Sn - Sn’
Metodo dei trapezi
Il metodo dei rettangoli approssima il valore dell’integrale su un intervallo di ampiezza h con
l’area di un trapezio di base h ed altezze date dal valore di f(x) agli estremi dell’intervallo.
Il metodo dei trapezi è esatto se la funzione è o una costante o lineare in x, ne segue che
l’errore è zero.
Calcoliamo l’errore con la seguente formula:
Dove M è il modulo della derivata seconda di f(x) in [a, b].
Metodo di Cavalieri-Simpson
Consiste nell’approssimare il grafico di una funzione con archi di parabole. Ciascun arco è
individuato da tre punti del grafico. Il valore approssimato dell’integrale si calcola la somma
delle aree dei trapezoidi delimitati da tali archi.
L’errore del calcolo lo si trova così:
Dove M è il modulo della derivata quarta di f(x) in [a, b].
BASSO RICCARDO
MAGAZZINO AUTOMATICO
! di 59
59
!