macchina in corrente continua
magneti permanenti
a
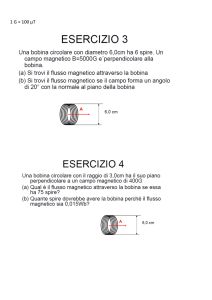
Struttura base del motore dc
Il classico motore in corrente continua ha
una parte che gira detta appunto rotore o
anche armatura e una parte che genera un
campo magnetico fisso (nell'esempio i due
magneti colorati) detta statore. Un
interruttore rotante detto commutatore o
collettore a spazzole inverte due volte ad
ogni giro la direzione della corrente
elettrica che percorre i due avvolgimenti
generando un campo magnetico che entra
ed
esce
dalle
parti
arrotondate
dell'armatura. Nascono forze di attrazione
e repulsione con i magneti permanenti fissi
La velocità di rotazione dipende da:
Tensione applicata.
Corrente assorbita dal rotore.
Carico applicato.
La coppia generata è proporzionale alla corrente ed il controllo più semplice agisce sulla tensione
d'alimentazione, mentre nei sistemi più complessi si usa un Controllo automatico in retroazione che
legge le variabili per generare la tensione da applicare al motore. Il motore CC a magneti
permanenti ha un comportamento reversibile: diventa un generatore di corrente continua se si
collega un altro motore all'albero. Si può allora prelevare l'energia elettrica prodotta collegandosi
alle spazzole, inoltre da questo si può intuire la sua capacità di agire anche da freno e/o usato per il
recupero dell'energia nei mezzi ibridi o essere semplificato come un semplice freno: applicando tra
le spazzole un resistore l'energia meccanica trasmessa all'albero si dissipa su questo resistore).
Riassumendo si può affermare che il motore CC ha tutte le funzioni necessarie per un mezzo
mobile: oltre alla funzione di motore può recuperare l'energia funzionando da dinamo quando serve
l'azione frenante o agire semplicemente da freno.
Il suo limite principale è nella necessità del commutatore a spazzole:
Le spazzole sono in grafite, mentre nei piccoli servomotori e nei tipi utilizzati nei lettori
CD/DVD
o
registratori
a
cassette
sono
in
lega
metallica
bianca.
La differenza è nella frequenza della loro sostituzione, infatti nelle macchine utensili come
smerigliatrici o trapani, si utilizzano spazzole in grafite, perché è molto semplice e veloce
sostituirle, le spazzole in metallo, sono usate su apparecchi dove risulta scomodo o non
conveniente cambiarle, come nei motori d'avviamento dei mezzi di trasporto.
Le spazzole pongono un limite alla massima velocità di rotazione: maggiore è la velocità e
più forte è la pressione che bisogna esercitare su di esse per mantenere un buon contatto,
comunque i motori universali usati negli aspirapolvere e negli elettroutensili portatili
(trapani, mole, ect.) possono raggiungere i 3.500-4.500 giri al minuto.
Tra spazzole e collettore, nei momenti di commutazione, si hanno transitori di apertura degli
avvolgimenti induttivi e quindi scintillio, attenuabile con l'anticipazione della commutazione
dei vari avvolgimenti rotorici (le spazzole devono essere ruotate assialmente in anticipo
rispetto alla rotazione dell'indotto), soluzione applicabile per motori che devono ruotare
sempre un una sola direzione.
Queste scintille comportano disturbi elettrici sia irradiati nell'ambiente circostante che
trasmessi al generatore di tensione (che alimenta il motore); questi disturbi, in determinati
settori di impiego, possono causare problemi di compatibilità elettromagnetica; è possibile
attenuarli tramite dei filtri.
La presenza di avvolgimenti elettrici sul rotore ha anche due aspetti negativi:
Se il motore è di grossa potenza si hanno dei problemi di smaltimento del calore (gli
avvolgimenti si riscaldano per effetto Joule e il campo magnetico alternato nel nucleo del
rotore genera altre perdite, causate da isteresi magnetica e correnti parassite nel nucleo
stesso, e quindi altro calore.
Gli avvolgimenti appesantiscono il rotore (aumenta il momento d'inerzia): se il motore deve
rispondere con rapidità e precisione (come avviene nelle automazioni industriali e nella
robotica) il controllo diventa più complesso; per piccole potenze (da 1 a 200W) e
servocontrolli a volte si usano particolari tipi di motori con rotore con avvolgimenti a forma
di bicchiere e privo del nucleo di ferro, detti "ironless": hanno bassa inerzia e rendimento
elettrico più elevato dei loro corrispondenti con rotore avvolto su nucleo di ferro.
Cenni Teoria
Se un conduttore è portato in un campo magnetico una forza F è
esercitata sullo stesso
Dove l è la lunghezza del filo, ed I e B formano un prodotto
vettoriale (cioè I e B devono essere sfasati di 90°).
Da questa ne deriva che:
F = l * I * B * sen(α)
Dove α è l’angolo tra il vettore corrente ed il vettore del campo
magnetico B. essendo un prodotto vettoriale la forza F risultante
sarà sfasata di 90° rispetto al vettore corrente e 90° rispetto al
vettore del campo magnetico B.
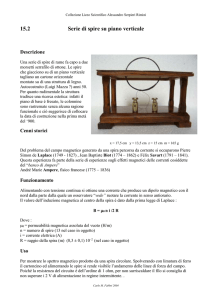
In base a questa legge fisica possiamo gia delineare il ruolo dei
magneti permanenti presenti nella cassa statorica. Essi non fanno
altro che generare un campo magnetico lineare (come si vede nella
figura 3).
Dalla figura 3 si notano le linee di campo magnetico ortogonali
all’asse di rotazione del motore.
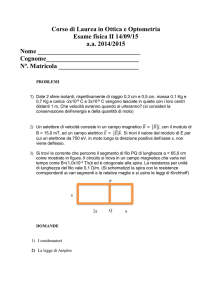
Ora se mettiamo delle spire sul rotore e le facciamo percorre da
corrente, essendo il vettore corrente ed il vettore del campo
magnetico ortogonali tra loro (solo quando la spira è orizzontale) su
codesta spira viene applicata una forza, pari alla forza di Lorenz.
Quando questa si trova nelle altre condizioni l’angolo α risulta
inferiore a 90°. Ciò comporta una riduzione della forza applicata
sulla spira e quindi sull’asse del rotore del motore.
Le forze vanno una verso l’alto e una verso il basso e sono applicate
sui lati lunghi della spira cioè quelli paralleli all’asse del motore.
Invece nel secondo quadrante si nota la spira in rotazione ed in
questo caso il vettore corrente ed il vettore del campo magnetico
non sono ortogonali tra loro e quindi la coppia applicata sulla spira
è inferiore a quella precedente.
In particolare si evidenzia la fase in cui sulla spira non viene
applicata alcuna forza perché questa è fuori dalle linee del campo
magnetico.
Con una spira quando questa arriva a posizionarsi come mostrato
nella figura 5 terzo quadrante, il rotare non è capace più di ruotare.
Per ovviare a questo problema, e quindi mantenere in motore in
rotazione, bisogna utilizzare almeno due spire poste in maniera
incrociata.
Il problema che si ha, è che le due spire devono essere alimentate.
Se mettessimo due fili collegati alle spire avvolte sul rotore dopo
pochi giri questi si aggroviglierebbero tra loro. Per risolvere questo
problema si utilizza un pezzo meccanico caratteristico solo del
motore a corrente continua, il “collettore”.
Il collettore è costituito da una serie di lamelle di rame poste vicine
tra loro ed ognuna isolata elettricamente dalle altre, nella seguente
figura si può notare un collettore di un motore a corrente continua:
Forza controelettromotrice
Quando il rotore inizia a ruotare ogni spira vede come se ci fosse un
campo magnetico variabile, perché essa si sposta nello spazio dove
sono presenti le linne di forza del campo magnetico.
Un campo magnetico variabile genera all’interno di una spira una
forza controelettromotrice, cioè una tensione che si oppone alla
forza che la ha generata, questa tensione è descritta dalla legge di
Lenz. Come detto la tensione generata si oppone alla tensione di
alimentazione. Questa forza controelettromotrice (dora in avanti
la indicheremo con E), essendo il modulo del campo magnetico
costante, risulta linearmente dipendente alla velocità di rotazione
del motore (velocità angolare ω):
E = Ke * ω
Ke costante elettrica della macchina che dipende dal numero di
conduttori e dal tipo di avvolgimento.
Modellazione matematica del motore a corrente continua
Ad ogni lamella del collettore vi è collegata un capo di ogni spira,
quindi se il motore ha due spire il collettore deve avere 4 lamelle.
Sopra il collettore vi strisciano due spazzole le quali forniscono
l’alimentazione elettrica necessaria alle spire per poter per mettere
al rotore di ruotare.
Le spire sono collegate su
lamelle opposte tra loro,
quindi
per
poter
alimentare
la
spira
completa
le
spazzole
devono
alimentare
le
lamelle
giuste.
Perciò
anche
le
spazzole
si
trovano distanziate tra
loro di 180° (opposte tra
loro).
I
motori
a
corrente
continua oggi presenti sul
mercato presentano un
numero di spire (o meglio
un
numero
di
avvolgimenti
di
spire)
anche superiore a 20.
.
Il motore a corrente continua può essere visto come l’insieme di
due parti fondamentali, una elettrica ed una meccanica.
Entrambe fanno parte del rotore. Lo statore ha solo il compito di
genera il campo magnetico per tale motivo non necessita alcuna
modellazione. Ma sicuramente
il campo magnetico B risulterà
nelle equazioni descrittive del
motore.
La
parte
elettrica
è
caratterizzata dalla resistenza
e
dall’induttanza
che
caratterizzano le spire avvolte
sul rotore:
Come si può notare dalla figura, essendo la spira composta da rame
questa avrà una resistenza caratteristica del filo, ed essendo il filo
avvolto a spirale questo si comporta come un induttore e quindi la
spira sarà caratterizzata anche da una induttanza caratteristica.
Come detto la forzacontroelettromotrice E dipende dalla velocità di
rotazione del motore, quindi all’avvio questa risulterà pari a 0 V.
Considerando il circuito elettrico che caratterizza la spira si ha che
l’equazione di tale circuito è la seguente:
V a R a i a La
Riassumendo il comportamento del motore dal punto di vista dinamico è dato dalle 4 equazioni
di a
eg
dt
Dove Va è la tensione di alimentazione e Ia è la corrente che circola
nelle spire.
Per quanto riguarda la legge di Lorenz vista in precedenza
possiamo affermare che sia il campo magnetico che la lunghezza
del filo sono costanti, quindi la Coppia Tm applicata sul rotore è la
seguente:
Tm kt I a
Kt costante meccanica della macchina
di a
eg
dt
d
B J
tr
dt
V a (t ) V a (s )
V a R a i a La
tm
i a (t ) I a (s )
(t ) (s )
t m (t ) T m (s )
t m kt ia
e g (t ) E g (s )
t r (t ) T r (s )
eg k e
Ke=Kt=Km costante di macchina
Trovare le soluzioni di un’equazione differenziale non è sempre facile. In alcuni casi si
può utilizzare la “trasformata di Laplace”, ossia: un operatore che trasforma una funzione
della variabile reale (y = f(x)) in una funzione della variabile complessa (y = F(s)).
Praticamente questo operatore trasforma l’equazione differenziale
in un’equazione algebrica facilmente risolvibile
L: f(x)
F(s)
L’equazione che descrive la parte meccanica e quindi la parte
rotorica è la seguente:
tr: coppia resistente
B: coefficiente di attrito
J: inerzia
Tm B J
d
tr
dt
ω : velocità angolare del motore
Quando il rotore comincia a ruotare all’interno delle spire si genera
una forza controelettromotrice che si oppone alla tensione di
alimentazione
applicata
al
motore.
Questa
forza
controelettromotrice (espressa in volt) è generata dalla seguente
equazione:
E=K*ω
Sostituendo le variabili in funzione di s nelle nostre equazioni abbiamo:
V
T
a
m
R
a
g
a
s La I
B s J T
Tm kt I a
E
I
ke
a
r
E
g
Inserendo nello schema a blocchi la formula:
Trovare le fdt
Per ricavare lo schema a blocchi iniziamo a ricavare Ia da questa formula:
V a R a I a s La I a E g
V a E g I a R a s La
Ia
1
Va E g
R a s La
E g ke
Otteniamo lo schema a blocchi finale del Motore C.C.
E ricordando che
Tm kt I a
Possiamo disegnare la prima parte dello schema:
Se la coppia resistente e l’attrito sono trascurabili:
k
Ricordando che:
Tm B s J Tr
1
T m T r
B s J
( R sL) sJ
N.B. Le soluzioni possono essere reali o complesse e coniugate:
e ricavando da tale formula Ω abbiamo:
1
t
( )
G
kt
R
sL sJ
Gch
2
kt kv
1 GH
s LJ sRJ kt k v
1
In questa formula compare Tm, che sottratta a Tr e moltiplicata per la f. di trasferimento dà la velocità Ω. Quindi
aggiungendo lo schema a blocchi precedentemente illustrato a quello che si ricava da questa formula otteniamo
Radici distinte trascuro attrito
G(S )
1 / Ke
1 / Ke
2
1 (1 s e ) s m s e m s m 1
NB la costante di tempo elettrica (te) e la costante di tempo elettromeccanica (tm) che valgono
rispettivamente
e = La / Ra
m = Ra*J / KT*KE
I poli possono essere reali o complessi e coniugati
quella elettrica t e = La / Ra
La costante di tempo elettrica è in genere molto più piccola di quella
elettromeccanica ( il polo elettromeccanico è dominante)
Trascurando nella somma la costante più piccola
G (S )
1/ Ke
1/ Ke
2
(1 s m )(1 s e ) ( s m e s ( m e ) 1
Si arriva alla seguente approssimazione della fdt del motore in cc
Esercizio Trovare la fdt
ANALISI A REGIME
Con coppia resistente
Tr 0
LA CARATTERISTICA DEL MOTORE C.C.
Tm kt I a
Ia
Facendo trascorrere molto tempo, in modo
tale che i sistemi in regimi transitori siano
sicuramente esauriti, abbiamo:
lim f(t) = lim s F(s) = F(s = 0)
t
s
0
Ponendo s = 0, lo schema a blocchi del motore a regime sarà il seguente:
Va E g
Ra
Dalle relazioni a
sinistra
possiamo
ricavare l’equazione
della retta
V k
T m k t a
R
a
E g k
Tm
k t V a k t k
Ra
Ra
Da qui ricaviamo le intersezioni con gli assi
Quando Ω = 0
=0
Quando Tm = 0
Tm
kt Va
Ra
Va
k
0
Riportando questi valori sul grafico otteniamo …
La velocità Ω in questo caso sarà:
kt
Ra B
kt
V
V
k t k a R a B k t k a
1
Ra B
Tm
k t V a k t k
Ra
Ra
T
m
kt Va kt k
Ra
Ra
V
Kv
k
t
R
V
a
a
Variando la tensione Va si ottiene una famiglia di rette in cui cambia l’intercetta ma non il coefficiente
angolare
Tm
kt Va kt k
Ra
Ra
Effetto della reazione d’indotto