Sistemi Meccatronici
Introduzione alla Dinamica e al Controllo dei Sistemi Meccanici
rev. 0.9
prof. Paolo Righettini
Università di Bergamo
20 novembre 2009
2
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
Indice
1 Modelli di sistemi meccanici
1.1 Sistemi a corpi rigidi . . . . . . . . . . . . . . . . . . . . . . .
1.2 Sistemi a corpi deformabili . . . . . . . . . . . . . . . . . . .
1.3 Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Equazione di moto per sistemi ad un gdl
2.1 Velocità geometrica . . . . . . . . . . . . . . .
2.1.1 Esempio . . . . . . . . . . . . . . . . .
2.2 Accelerazione geometrica . . . . . . . . . . .
2.2.1 Esempio . . . . . . . . . . . . . . . . .
2.3 Bilancio di potenze . . . . . . . . . . . . . . .
2.3.1 Esempi . . . . . . . . . . . . . . . . .
2.4 Integrazione Numerica dell’equazione di moto
2.4.1 Metodo di Eulero . . . . . . . . . . . .
2.4.2 Applicazione all’equazione di moto . .
2.5 Equazioni di Lagrange . . . . . . . . . . . . .
2.5.1 Esempio . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
3 Comportamento dinamico in un intorno della
equilibrio
3.1 Esempi sulla scrittura delle equazioni di moto .
3.1.1 Manovellismo . . . . . . . . . . . . . . .
3.1.2 Pendolo . . . . . . . . . . . . . . . . . .
3.2 Risoluzione dell’equazione di moto . . . . . . .
3.2.1 Vibrazioni libere . . . . . . . . . . . . .
3.2.2 Vibrazioni smorzate . . . . . . . . . . .
3.3 Rigidezza degli elementi elastici . . . . . . . . .
3.3.1 Esempi . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
6
7
9
11
14
15
16
18
19
20
23
24
25
30
31
posizione di
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
33
33
33
37
40
41
45
51
53
4 Sistemi ad un grado di libertà forzato
59
4.1 Forzanti armoniche . . . . . . . . . . . . . . . . . . . . . . . . 60
4.2 Forze d’inerzia rotanti ed alternate . . . . . . . . . . . . . . . 67
3
4
INDICE
4.3
4.4
4.5
4.6
Eccitazione per spostamento del vincolo impresso
Forze trasmesse . . . . . . . . . . . . . . . . . . .
Isolamento dalle vibrazioni . . . . . . . . . . . .
Esempi . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
68
72
73
75
5 Funzioni di trasferimento
5.1 Determinazione e caratteristiche della funzione di trasferimento
5.2 Transitori . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Risposta allo scalino di un sistema del secondo ordine
5.2.2 Risposta al gradino di sistemi del primo ordine . . . .
5.2.3 Esempi . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Risposta di regime - analisi in frequenza . . . . . . . . . . . .
5.3.1 Diagrammi asintotici di Bode . . . . . . . . . . . . . .
6 Introduzione al controllo dei sistemi meccanici
6.1 Modello motore corrente continua . . . . . . . . .
6.1.1 Modello elettrico . . . . . . . . . . . . . .
6.1.2 Comportamento dinamico . . . . . . . . .
6.2 Accoppiamento statico con il carico . . . . . . . .
6.3 Controllo in anello aperto . . . . . . . . . . . . .
6.4 Controllo in anello chiuso . . . . . . . . . . . . .
6.4.1 Funzione di trasferimento ad anello chiuso
6.4.2 Regolatori PID . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
A Dal P.L.V. al teorema dell’energia cinetica
B Trasformata di Laplace
B.1 Derivazione nel dominio del tempo
B.2 Integrazione nel dominio del tempo
B.3 Linearità . . . . . . . . . . . . . . .
B.4 Teorema del valore iniziale e finale
B.5 Trasformate razionali . . . . . . . .
B.6 Sviluppo di Heavside . . . . . . . .
B.6.1 Poli reali distinti . . . . . .
B.6.2 Poli complessi coniugati . .
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
83
84
86
86
89
90
92
99
105
105
109
110
115
117
119
120
120
125
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
127
128
129
129
129
130
130
130
131
prof. Paolo Righettini - Università di Bergamo
Capitolo 1
Modelli di sistemi
meccanici
Il comportamento dinamico di sistemi meccanici può essere analizzato ricorrendo ad opportuni modelli in funzione del tipo di indagine richiesta.
Una prima analisi dinamica possibile è lo studio del movimento degli
elementi costituenti il sistema in funzione delle forze esterne applicate (motrici e resistenti). Per questo tipo di analisi risulta di sovente sufficiente
una schematizzazione a “corpi rigidi” degli elementi costituenti il sistema.
In questa schematizzazione si trascureranno perciò le deformabilità degli
elementi meccanici, comunque presenti per il fatto che essi sono soggetti
a coppie e forze. L’entità di tale deformazione viene ritenuta trascurabile
rispetto al movimento complessivo e non viene introdotta nella stesura del
modello. I sistemi descritti con questo tipo di modello sono detti “sistemi
a corpi rigidi”.
Questa schematizzazione può essere considerata valida fino a che la deformabilità degli elementi non influenza il moto complessivo o le reazioni
vincolari non assumo valori eccessivamente diversi rispetto al caso rigido.
In queste circostante risulta opportuno utilizzare un modello che tenga conto anche della deformabilità degli elementi, al fine di indagare quanto questa
possa influenzare il moto o le forze che gli elementi si scambiano fra loro. Si
tratterà quindi di introdurre “corpi deformabili” nel modello del sistema.
Un secondo tipo di analisi dinamica è allora lo studio delle vibrazioni,
dovute alla cedevolezza degli elementi. In questo caso risulta allora utile
analizzare il comportamento in un intorno di una configurazione, in modo
da valutare l’effetto introdotto dalla deformabilità degli elementi. I sistemi
meccanici cosı̀ studiati vengono chiamati “sistemi a corpi deformabili”.
5
6
CAPITOLO 1. MODELLI DI SISTEMI MECCANICI
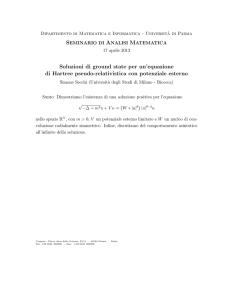
Figura 1.1: Schema a corpi rigidi di un mandrino
1.1
Sistemi a corpi rigidi
Uno dei problemi ampiamente diffuso nel campo dell’ingegneria è l’analisi
del moto di un sistema meccanico, costituito da più elementi meccanici fra di
loro collegati da opportuni vincoli cinematici. Gli elementi meccanici interconnessi sono considerati rigidi, la loro deformata dovuta al carico applicato
è considerata trascurabile rispetto al movimento che compiono. Nel modello i vincoli cinematici sono considerati lisci (non dissipano energia), ideali,
con deformazioni nulle per qualsiasi carico applicato, ovvero i vincoli sono
considerati olonomi. Questi possono essere ad esempio cerniere o carrelli,
che dal punto applicativo corrispondono a cuscinetti o guide prismatiche.
Le ipotesi enunciate sono molto forti, condizioni irrealizzabili costruttivamente, si dovrà allora valutare se effettivamente il loro comportamento è
assimilabile a quello ideale per l’applicazione in studio.
I parametri necessari alla descrizione di questo tipo di modello sono
quelli di massa, le equazioni di vincolo introdotte dalle coppie cinematiche
e le forze applicate al sistema. Il numero delle coordinate libere dipende
dal numero di corpi rigidi che costituiscono il modello e dal numero delle
equazioni di vincolo.
Un esempio di un sistema a corpi rigidi è riportato in figura 1.1. Il sistema ha un solo gradi di libertà, ad esempio la rotazione del motore αm , a cui
sono linearmente legate le rotazioni di tutti gli altri corpi. Il comportamento
dinamico ci permette di legare le accelerazioni del motore alle coppie motrici/resistenti applicate in funzione dei parametri di massa, viene trascurata
la cedevolezza degli alberi di trasmissione e ruote dentate. I risultati ottenuti possono permettere una valutazione delle caratteristiche meccaniche
delle ruote dentate e alberi di trasmissione necessarie affinchè nelle condizioni operative il sistema sia in condizioni di sicurezza oppure di determinare
l’andamento della coppia motrice richiesto per un assegnato movimento del
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
7
CAPITOLO 1. MODELLI DI SISTEMI MECCANICI
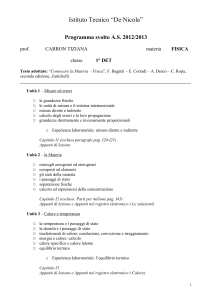
Figura 1.2: Schema a corpi rigidi di un manovellismo
carico. L’equazione di moto può essere determinata ricorrendo agli equilibri
dinamici.
A tal riguardo si può citare il manovellismo di figura 1.2, composto da
4 elementi (manovella, biella, corsoio e telaio), fra di loro opportunamente
collegati per mezzo di tre cerniere piane ed una guida prismatica. Il sistema
ha un grado di lebertà, infatti essendo costituito dal tre corpi mobili, per
complessivi 9 gdl, 4 coppie cinematiche ognuna delle quali pone 2 equazioni
di vincolo per un totale di 8 gdv. Complessivamente ha quindi un solo grado
di libertà, ad esempio la rotazione della manovella. In questo meccanismo
è di interessa il legame fra la rotazione della manovella e lo spostamento
del corsoio (o il legame fra la coppia applicata alla manovella e la forza
applicata al corsoio).
1.2
Sistemi a corpi deformabili
In questo tipo di sistemi si è generalmente interessati all’analisi dell’influenza della cedevolezza degli elementi sul moto o l’insorgenza di fenomeni
vibratori. Tale indagine viene generalmente effettuata paragonando il comportamento del moto in piccolo rispetto al caso statico, ovvero rispetto al
caso in cui il “moto in piccolo” è completamente assente.
Le cedevolezze introdotte possono rappresentare anche la deformabilità
dei vincoli, in modo che nel modello possano essere introdotte delle coppie
cinematiche ideali.
La scelta di quali elementi all’interno del modello considerare rigidi e
quali flessibili deve tenere conto della rigidezza associata agli elementi e del
carico inerziale che li attraversa.
L’introduzione di elementi flessibili comporta un cospicuo aumento dei
parametri che descrivono il modello, la cui valutazione può essere in talune
circostanze onerosa o valutabile solamente dal punto di vista sperimentale.
In alcune applicazioni si potranno considerare sistemi deformabili a parameappunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
8
CAPITOLO 1. MODELLI DI SISTEMI MECCANICI
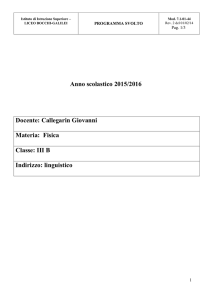
Figura 1.3: Schema a corpi rigidi di un mandrino con albero deformabile
tri concentrati, scelta che permette di ridurre la complessità computazionale
ed il numero di parametri. Altrimenti si possono introdurre sistemi continui le cui equazioni costitutive permettono l’analisi di ogni singolo punto
appartenente all’elemento.
Oltre ai parametri indicati nel caso dei modelli a corpi rigidi si devono
introdurre le cedevolezze (deformabilità) e le masse delle parti deformabili. Il numero dei gradi di libertà aumenta con il numero di cedevolezze
introdotte ed il modello dinamico risulta più complesso.
In questo tipo di modelli rientrano anche quelli delle strutture (costruzioni in acciaio o cemento armato) che sono statiche. Infatti esse non hanno
moto in grande, ma viene studiato il moto in piccolo per valutare l’effetto
degli elementi deformabili sulle reazioni di vincolo quando sono soggette ad
un terremoto.
A titolo d’esempio possiamo considerare il sistema di figura 1.3 che rappresenta il modello di un mandrino con un albero di trasmissione torsionalmente deformabile. La deformabilità dell’albero è rappresentata dalla
rigidezza torsionale kt . Complessivamente il sistema ha perciò 2 gdl, ad
esempio la rotazione dell’albero motore e del carico, che ci permettono analizzare di quanto il comportamento dinamico di questo modello si discosta
da quello presentato in figura 1.1 per la cedevolezza dell’albero. L’integrazione di questo sistema a due gradi di libertà risulta più onerosa rispetto al
caso rigido.
Il sistema presentato in figura 1.4 rappresenta un manovellismo in cui
la cerniera del corsoio è deformabile lungo la direzione del corsoio. La
deformabilità del vincolo è rappresentata dalla rigidezza kv . In questo caso
il sistema ha un grado di libertà in più rispetto al caso di figura 1.2, che ci
permette di analizzare di quanto il moto della massa M si discosta dal caso
rigido per la presenza della cedevolezza del vincolo.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
9
CAPITOLO 1. MODELLI DI SISTEMI MECCANICI
Figura 1.4: Schema a corpi rigidi di un manovellismo
1.3
Conclusioni
Lo studio del problema dinamico prevede quindi la definizione di un modello
che possa adeguatamente descrivere il comportamento del sistema in studio.
La definizione del modello comprende anche la determinazione dei parametri
che lo descrivono (geometrici, di massa, strutturali, forze motrici e resistenti,
ecc.).
Successivamente si dovrà scrivere l’equazione di moto (più equazioni per
sistemi a più gradi di libertà) le cui caratteristiche potranno dare indicazioni
sul comportamento dinamico del sistema. L’equazione differenziale risultante potrà essere integrata in forma chiusa o numericamente per analizzare i
transitori.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
10
CAPITOLO 1. MODELLI DI SISTEMI MECCANICI
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
Capitolo 2
Equazione di moto per
sistemi ad un gdl
L’equazione di moto di un sistema ad un grado di libertà può essere scritta
seguendo diversi approcci. Il primo proposto è il bilancio di potenze che
permette di ottenere l’equazione di moto senza considerare le reazioni vincolari. Infatti nei modelli a cui facciamo riferimento i vincoli sono ideali e
lisci, condizioni nelle quali le reazioni vincolari non lavorano e quindi non
dissipano energia.
Prenderemo in considerazione le forze generalizzate agenti sul sistema,
forze o coppie a seconda dei casi, ovvero le forze esterne applicate in punti
definiti dei corpi e, ricorrendo al principio di D’Alambert, le forze d’inerzia.
Nel caso di sistemi piani la risultante dei forze d’inerzia di un corpo
rigido dipende dalla massa e dell’accelerazione del baricentro
F in = −mg aG .
(2.1)
La risultate delle coppie d’inerzia, nelle medesime ipotesi, dipende dal momento d’inerzia baricentrale e dell’accelerazione angolare del corpo
M in,G = −JG ω̇ .
(2.2)
Il calcolo delle azioni d’inerzia risulta quindi il prodotto di un parametro
di massa per l’accelerazione (lineare o angolare) del baricentro del corpo
rigido.
Per il calcolo delle potenze di tutte le forze facciamo allora riferimento
a tutti gli N punti a cui sono applicate delle forze esterne e/o delle azioni
d’inerzia. Considerando le forze generalizzate, e quindi non distinguendo fra
accelerazioni lineari ed angolari e fra masse e momenti d’inerzia, la potenza
delle forze generalizzate applicate al punto i-esimo sarà allora
Wi = (F i − mi ai ) · v i ,
11
(2.3)
12
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
Figura 2.1: Schema a corpi rigidi di un motociclo
in cui il pedice i fa riferimento ai corpi a cui è applicata una coppia esterna,
o che hanno un momento d’inerzia, e a punti a cui sono applicate forze
esterne o che sono caratterizzati da masse concentrate. Il bilancio di potenza
dell’intero sistema potrà allora essere imposto per mezzo della relazione
N
X
(F i − mi ai ) · v i = 0 .
(2.4)
i=1
Per applicare il bilancio di potenza si dovrà quindi:
• definire la coordinata libera del sistema;
• calcolare la velocità v i dei punti di applicazione delle forze esterne;
• calcolare l’accelerazione ai dei punti di massa;
• sviluppare il bilancio di potenze espresso dall’equazione 2.4.
Nel modello semplificato di motociclo ad un solo grado di libertà, presentato in figura 2.1, i corpi sono considerati rigidi e i vincoli ideali, le ruote
ruotano senza strisciare sul piano ed il vincolo di contatto sul piano sia
bilatero. Si trascurano le masse e i momenti d’inerzia associati alle ruote,
si considera come unico punto di massa il baricentro del motociclo. Alla
ruota motrice è applicata la coppia Cm(t) in verso orario e si assume come
coordinata libera la rotazione oraria α della ruota motrice.
In questo caso i punti di interesse sono due, uno la traccia dell’asse di
rotazione della ruota a cui viene applicata la coppia motrice, l’altro il baricentro del motociclo. Si tratta quindi di determinare per ambedue i punti
la dipendenza della loro velocità dalla coordinata libera. Per il baricentro,
essendo punto di massa, sarà necessario determinare la dipendenza della sua
accelerazione dalla coordinata libera.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
13
1. Rotazione ruota.
La rotazione della ruota coincide con la coordinata libera, per cui il
vettore velocità di rotazione sarà un vettore perpendicolare ed entrante
nel piano del foglio con modulo α̇;
2. Baricentro.
La posizione del baricentro può essere espressa dalla coordinata x nel
sistema di riferimento di figura, ovvero in notazione vettoriale x = x~i
dove ~i è il versore dell’asse assunto come riferimento, parallelo al piano
stradale. Il legame fra la posizione x del baricentro e la coordinata
libera è x = Rα a partire da un’arbitraria origine. Il vettore velocità si
ottiene derivando rispetto al tempo il vettore posizione. In questo caso
la derivazione è semplice in quanto il verso del vettore non varia in
funzione della coordinata libera, rimane, per ogni posizione raggiunta,
parallelo al piano stradale. Il vettore velocità sarà allora diretto come
~i di modulo ẋ = Rα̇. Analogamente il modulo dell’accelerazione saraà
ẍ = Rα̈.
È ora possibile applicare il bilancio di potenze espresso dalla 2.4 per i due
punti individuati nell’esempio:
Cm · α̇ − mG Rα̈~i · Rα̇~i = 0
da cui
α̈(t) =
Cm (t)
.
mG R 2
(2.5)
(2.6)
L’equazione di moto trovata fissa il legame fra l’accelerazione del motociclo e la coppia applicata alla ruota. L’integrazione di questa equazione
differenziale a coefficiente costanti del secondo ordine ci permette di risalire
alla legge oraria che descrive il movimento del veicolo.
R
α̇(t) = α̇(0) + α̈(t)dt
(2.7)
R
α(t) = α(0) + α̇(t)dt
La complessità dell’integrazione in forma chiusa dipende solamente dalla
complessità della funzione Cm (t). In ogni caso è sempre possibile determinare la soluzione numerica dell’integrale.
Il legame cinematico fra i punti di interesse e la coordinata libera non
è in generale cosı̀ semplice come presentato nell’esempio precedente, in cui
la direzione del vettore x è costante ed il modulo dipende linearmente dalla
coordinata libera.
La sospensione rappresentata in figura 2.2 è un sistema con caratteristiche cinematiche più complesse rispetto al caso del motociclo. In questo
modello viene trascurata la cedevolezza della gomma, tutti gli elementi sono
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
14
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
Figura 2.2: Schema a corpi rigidi di una sospensione
rigidi, i vincoli sono ideali e l’unico elemento dotato di massa è la ruota. È
composta da 7 corpi rigidi, per un totale di 21 gdl, 8 cerniere che impongono
16 gdv e 2 manicotti che impongono 4 gdv. Il sistema ha quindi 1 solo gdl.
La coordinata libera scelta è la rotazione α dell’asta A0 − A.
Per applicare il bilancio di potenze espresso dalla 2.4 si deve determinare
la velocità e l’accelerazione del baricentro G della ruota che, per generalità,
indicheremo come il punto Pi .
2.1
Velocità geometrica
La posizione di Pi è fissata dalla configurazione raggiunta dal sistema in
funzione della coordinata libera α, e può essere descritta, in un opportuno
sistema di riferimento, da un vettore P i , anch’esso funzione di α, risulta
cioè
P i = P i (α) .
(2.8)
Per una variazione ∆α della coordinata libera, come mostrato in figura
0
2.3, il punto raggiungerà una nuova posizione, descritta dal vettore P i (α +
0
∆α), scostata rispetto alla precedente della quantità ∆S i (α) = P i − P i
funzione della configurazione, e quindi di α.
Se l’incremento ∆α viene imposto nell’intervallo di tempo ∆t, la velocità
media di spostamento del punto è
v̄ i =
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
∆S i
∆t
(2.9)
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
15
Figura 2.3: Spostamento del punto Pi
Per intervalli di tempo ∆t → 0, gli spostamenti ∆S i divengono infinitesimi
e la velocità media di spostamento tende alla velocità istantanea v i ,
vi =
dS i
dS i dα
=
= τ i α̇ .
dt
dα dt
(2.10)
Il vettore τ i descrive il legame fra lo spostamento infinitesimo di un punto
per una variazione infinitesima dα della coordinata libera, dipende da α,
che fissa la configurazione geometrica raggiunta, non dipende dal tempo,
e quindi descrive una caratteristica geometrica del punto Pi . Viene indicato come velocità geometrica o rapporto di trasmissione generalizzato; è
descritto dai due parametri tipici dei vettori, modulo e anomalia, che sono
funzione della sola coordinata libera α, per cui τ i = τ i (α).
La velocità di un punto di un corpo del sistema è rappresentata dal
prodotto della velocità geometrica del punto per la velocità della coordinata
libera
v i = τ i α̇ .
(2.11)
La velocità geometrica τ i è allora un vettore tangente alla traiettoria come
lo è il vettore velocità v i
τ i = |τ i |~t .
(2.12)
Può essere facilmente determinata dall’analisi cinematica, come la velocità
del punto calcolata per velocità unitaria α̇ = 1 della coordinata libera.
2.1.1
Esempio
In riferimento alla figura 2.4, rappresentante una parte della sospensione di
figura 2.2 viene illustrato il calcolo di τ del baricentro della ruota. Per il
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
16
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
Figura 2.4: Calcolo di τ
calcolo si fa riferimento all’equazione 2.11 che lega la velocità di un punto
al corrispondente rapporto di trasmissione τ .
Il mozzo della ruota è rigidamente collegato alla biella del parallelogramma quadrilatero A0 − A − B − B0 , per cui trasla nel piano. Il Centro di
Istantanea Rotazione (CIR) è all’infinito nella direzione fissata dai bilancieri
A0 − A e B0 − B, tutti i punti solidali alla biella percorrono delle traiettorie
ad arco di cerchio di raggio a. La velocità del baricentro coincide allora in
modulo e verso con la velocità dei punti A a B pari a
V a = V b = V G = aα̇~t
e sarà tangente alla traiettoria. Da questa espressione, ricordando la 2.11,
e che τ coincide con v per α̇ = 1, risulta
τ = a~t .
In questo caso τ ha modulo costante pari ad a ed anomalia che dipende
dalla posizione; infatti il versore tangente alla traiettoria forma con l’esse
orizzontale un’angolo α + π/2.
´
³
(2.13)
τ = a ~i cos(α + π/2) + ~j sin(α + π/2) .
2.2
Accelerazione geometrica
L’accelerazione del punto Pi può essere determinata derivando rispetto al
tempo la 2.11, risulta allora
ai =
dτ i
dτ i dα
dv i
=
α̇ + τ i α̈ =
α̇ + τ i α̈ .
dt
dt
dα dt
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
(2.14)
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
17
Figura 2.5: Approssimazione del II ordine della traiettoria
L’accelerazione dipende da due contributi: il primo τ i α̈ è dovuto all’accele2
i
razione α̈ della coordinata libera; il secondo dτ
dα α̇ è dovuto alla variazione
del rapporto di trasmissione rispetto alla coordinata libera.
La derivata del rapporto di trasmissione rispetto alla coordinata libera
è una caratteristica geometrica del punto, dipende dalla configurazione raggiunta e quindi dalla coordinata libera, viene indicata come accelerazione
geometrica
dτ i
= γ i = γ i (α) .
(2.15)
dα
γ i è un vettore che può essere facilmente determinato dall’analisi cinematica,
corrisponde all’accelerazione del punto Pi calcolata per α̈ = 0 e per α̇ = 1;
in tali condizioni dalla 2.14 risulta infatti ai = γ i .
L’accelerazione geometrica ha due componenti significative, una tangente e l’altra normale alla traiettoria. Ricordando la 2.12 risulta
γi =
d~t
dτ i
d ¡ ~¢ d|τ i | ~
t + |τ i |
=
|τ i |t =
.
dα
dα
dα
dα
(2.16)
La derivata del versore tangente alla traiettoria rispetto alla coordinata
libera può essere determinata ricorrendo alla relazione di Frenet. Facendo
riferimento alla figura 2.5, si considera un’approssimazione del secondo ordine della traiettoria nel punto Pi . Per una variazione infinitesima dα della
0
coordinata libera il punto Pi raggiunge la posizione Pi con uno spostamento
dS. A tale spostamento corrisponde lo spostamento angolare dθ misurato
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
18
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
al centro del cerchio osculatore, tale che dS = ρdθ, con ρ raggio di curvatura della traiettoria. Ricordando la definizione di τ , è anche dS = τ dα.
0
Passando dal punto Pi al punto Pi la tangente alla traiettoria subisce una
rotazione dθ, per cui essa subisce uno spostamento d~t di modulo
|dS|
|τ |dα
=
|d~t| = |~t|dθ = 1
ρ
ρ
(2.17)
e con direzione coincidente con la normale alla traiettoria nel punto Pi .
La derivata del versore tangente alla traiettoria rispetto alla coordinata
libera risulta allora
d~t
|τ |
=
~n ,
(2.18)
dα
ρ
mentre l’accelerazione geometrica γ i in funzione delle componenti tangenziali e normali è:
d|τ i | ~ |τ i |2
γi =
t+
~n .
(2.19)
dα
ρ
Le due componenti sono funzione della coordinata libera, quella tangenziale dipende dalla variazione del modulo del rapporto di trasmissione,
mentre quella normale dipende dalla variazione della direzione del rapporto di trasmissione. Queste due componenti non corrispondono in generale
all’accelerazione normale e tangenziale della traiettoria.
Complessivamente l’accelerazione è espressa dalle relazioni
ai = γ i α̇2 + τ i α̈
µ
¶
d|τ i | ~ |τ i |2
t+
ai = γ i α̇2 + τ i α̈ =
~n α̇2 + |τ i |~tα̈ ,
dα
ρ
(2.20)
(2.21)
per cui l’accelerazione è determinabile in funzione delle derivate di ordine 0,
1 e 2 della coordinata libera; infatti è necessario calcolare la velocità geometrica τ (α) e l’accelerazione geometrica γ(α), per poi applicare la relazione
2.20.
2.2.1
Esempio
Il calcolo dell’accelerazione geometrica del baricentro della ruota di figura
2.6, rappresentante una parte della sospensione di figura 2.1, può essere
condotto in due modi.
Il primo prevede di derivare rispetto alla coordinata libera α l’espressione
della velocità geometrica τ , espressa dalla relazione 2.13. Si ottiene
h
i
~i sin(α + π/2) + ~j cos(α + π/2)
γ = dτ
=
a
−
dα
h
i
=
a −~i cos(α) − ~j sin(α) .
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
19
Figura 2.6: Calcolo di γ
L’accelerazione geometrica ha allora modulo a ed è diretta come la normale
alla traiettoria.
L’accelerazione geometrica può essere calcolata considerando la 2.20 e
ricordando che γ coincide con l’accelerazione per α̇ = 1 e per α̈ = 0. In
questo caso il punto si muove lungo in arco di circonferenza di raggio a,
con un velocità angolare α̇; nelle condizioni specificate (α̈ = 0) l’accelerazione tangenziale è nulla, mentre l’accelerazione centripeta è aα̇. Allora
l’accelerazione geometrica avrà modulo a e sarà diretta come la normale
alla traiettoria.
γ = a~n .
Questo risultato poteva essere dedotta anche dalla 2.21, in cui sono esplicitate le componenti normali e tangenziali; nelle condizioni poste solo la componente normale dell’accelerazione geometrica è diversa da zero, in quanto il
modulo del rapporto di trasmissione è costante, mentre la direzione dipende
da α.
2.3
Bilancio di potenze
Lo sviluppo dell’analisi cinematica condotta nei paragrafi precedenti permette di riscrivere il bilancio di potenze espresso dalla 2.4; introducendo le
espressioni della velocità 2.11 e dell’accelerazione 2.14 si ottiene:
N
X
£
¤
F i − mi (γ i α̇2 + τ i α̈) · τ i α̇ = 0
(2.22)
i=1
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
20
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
N
X
£
¤
F i · τ i − mi γ i · τ i α̇2 − mi τi2 α̈ = 0 .
(2.23)
i=1
L’equazione di moto espressa dalla 2.23 permette di risolvere i due
problemi dinamici fondamentali, dinamica diretta e dinamica inversa.
In problema dinamico inverso consente di calcolare la coppia motrice
necessaria ad ottenere una definita legge oraria della coordinata libera α(t),
essendo note le forze resistenti applicate al sistema. In questo caso essendo
assegnata la leggere oraria α(t), sono anche assegnate le derivate prime e
seconde, per cui i termini differenziali nella 2.23 sono noti; essa si riduce
allora ad una semplice equazione scalare che permette di determinare l’incognita. Si tratta di determinare le espressioni di τ i e di γ i in funzione
della coordinata libera α, la risoluzione è del tutto analoga a quella del caso
statico, per tale motivo questo problema è anche detto cinetostatico.
Il problema dinamico diretto permette la determinazione dell’accelerazione α̈ della coordinata libera note α, α̇ e le forze attive e passive applicate
al sistema
N
X
£
¤
F i · τ i − mi γ i · τ i α̇2
α̈ =
i=1
N
X
.
(2.24)
mi τi2
i=1
La legge oraria α(t) si ottiene dall’integrazione dell’equazione differenziale espressa dalla 2.23, la difficoltà dell’integrazione dipende essenzialmente
dalla complessità dei termini che compongono la 2.23. In alcune circostanze
non è possibile determinare l’integrale in forma chiusa, in questi casi l’unica
soluzione possibile è quella numerica. In ogni caso sarà necessario fissare le
condizioni iniziali di velocità e posizione che corrispondono alle due costanti
di integrazione.
Dall’equazione differenziale 2.24 si possono facilmente ottenere dei casi
notevoli. Ad esempio considerando rapporti di trasmissione e forze costanti
in modulo ed anomalia, risulta γ = 0 e quindi otterremo α̈ = cost, moto
uniformemente accelerato, facilmente integrabile in forma chiusa.
2.3.1
Esempi
Equazione di moto per una sospensione
La figura 2.7 rappresenta lo schema di una sospensione, in cui la forza
esercitata dal gruppo molla-ammortizzatore, sempre diretta verso l’alto, è
indicata con Fe , la forza di contatto fra ruota e terreno, sempre diretta verso
l’alto, è indicata con Fc . L’unico elemento dotato di massa è la ruota.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
21
Figura 2.7: Schema a corpi rigidi di una sospensione
L’equazione di moto che descrive il comportamento dinamico della sospensione può essere calcolata ricorrendo all’equazione 2.24. I punti di
interesse sono in questo caso 3 come indicato in figura:
1. Punto di contatto ruota terreno.
In questo punto è applicata la forza esterna F c . Il suo rapporto di
trasmissione è stato determinato nel paragrafo 2.1.1 ed è
³
´
τ 1 = a ~i cos(α + π/2) + ~j sin(α + π/2) .
2. Centro di massa della ruota.
Per i punti che rappresentano il centro di massa si deve determinare
sia τ che γ. Analogamente a quanto visto per il punto 1 risulta
´
³
τ 2 = a ~i cos(α + π/2) + ~j sin(α + π/2) .
Il calcolo di γ è riportato nel paragrafo 2.2.1 e risulta
h
i
γ 2 = a −~i cos(α) − ~j sin(α) .
3. Punto di attacco del gruppo molla-ammortizzatore.
Analogamente a quanto visto per il punto 1, il rapporto di trasmissione
risulta
´
³
τ 3 = b ~i cos(α − π/2) + ~j sin(α − π/2) .
Le forze esterne hanno le espressioni vettoriali F c = Fc~j e F e = Fe~j.
Applicando la 2.24 si ottiene
α̈ =
Fc · τ1 + Fe · τ3
mτ22
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
22
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
Figura 2.8: Manovellismo
Fc a sin(α − π/2) + Fe b sin(α + π/2)
(2.25)
ma2
Quest’ultima relazione esprime l’accelerazione della coordinata in funzione della coordinata libera α ed in funzione del modulo delle forze esterne. L’integrazione di questa equazione differenziale, fissando le condizioni
iniziali di velocità e posizione, ci permette di ricavare l’andamento di α(t).
α̈ =
Equazione di moto per un manovellismo
Il manovellismo rappresentato in figura 2.8 è modellizato a corpi rigidi, i
vincoli siano ideali e fissi. Il moto è garantito dalla coppia motrice Cm
applicata alla manovella, la forza resiste Fr applicata al corsoio è funzione
della posizione e della velocità del corsoio Fr = Fr (x, ẋ). Il corsoio ha
massa m2 mentre la manovella ha una massa m1 ed un momento d’inerzia
baricentrale JG .
Assumendo come coordinata libera la rotazione α della manovella, la
posizione del corsoio misurata a partire dal punto morto esterno risulta
p
x = l + r − r cos α − l2 − r2 sin2 α
(2.26)
mentre la velocità
"
ẋ = r sin α + p
r2 sin(2α)
l2 − r2 sin2 α
#
α̇ .
Per la scrittura dell’equazione di moto per mezzo del bilancio di potenze,
si prendono in considerazione tre punti caratteristici:
1. Centro di massa della manovella.
Questo punto ha una traiettoria circolare, il rapporto di trasmissione
ha modulo costante e verso funzione della coordinata libera, risulta:
τ 1 = a~t1
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
23
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
dove ~t1 è il versore tangente alla traiettoria seguita dal punto, quindi
ruotato di α + π/2 rispetto alla direzione orizzontale assunta come
riferimento. L’accelerazione geometrica γ 1 è normale alla traiettoria
(il modulo di τ è costante) e ha modulo pari ad a.
γ 1 = a~n1 .
2. Centro del corsoio.
In questo punto si intende concentrata la massa del corsoio ed applicata la forza resistente. Dall’analisi della velocità del corsoio risulta
#
"
r2 sin(2α)
~i
τ 2 = r sin α + p
l2 − r2 sin2 α
Il rapporto di trasmissione ha allora direzione fissa ma il modulo è
funzione della coordinata libera. Ricordando la 2.19, l’espressione
dell’accelerazione geometrica si ottiene derivando rispetto ad α il modulo del rapporto di trasmissione; in questi casi ha una componente
tangenziale diversa da zero. Si ottiene:
"
#
r2 cos(2α)
r4 sin(2 a) sin α cos α ~
γ 2 = r cos α + 2 p
+ ¡
¢3/2 i
l2 − r2 sin2 α
l2 − r2 sin2 α
3. Traccia dell’asse di rotazione della manovella.
La rotazione della manovella coincide con la coordinata libera, per cui
τ 3 = −1~k
mentre γ 3 è nullo in quanto il rapporto di trasmissione è costante.
L’espressione dell’accelerazione risulta allora:
α̈ =
F r (x, ẋ) · τ 2 − m2 γ 2 · τ 2 α̇2 + C m · τ3
m1 τ12 + m2 τ22 + JG
(2.27)
I termini geometrici che compaiono in quest’equazione sono tutti funzione di α, la forza resistente è funzione di α e di α̇ mentre la coppia motrice
può essere funzione del tempo. L’integrazione in forma chiusa per la determinazione della legge oraria α(t) può risultare complessa o addirittura
impossibile. In questi casi il problema dinamico diretto può essere risolto
efficacemente ricorrendo all’integrazione numerica.
2.4
Integrazione Numerica dell’equazione di
moto
In questo paragrafo sono riportati alcuni cenni sull’integrazione numerica
di equazioni differenziali, non viene proposta una trattazione esaustiva, e si
rimanda a testi specializzati per un approfondimento sulla tematica.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
24
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
Prendendo in considerazione un problema ai valori iniziali per un’equazione differenziale ordinaria del primo ordine in forma esplicita
½
ẏ(t) = f (t, y(t))
(2.28)
y(t0 ) = y0
l’integrazione alle differenze finite (numerica) consiste nella determinazione
di un’approssimazione della funzione primitiva y(t). Tale approssimazione viene determinata per un numero finito di valori t1 , t2 , t3 , . . . , tn della
variabile di integrazione.
2.4.1
Metodo di Eulero
Il metodo di integrazione numerica più semplice è quello di Eulero che permette di determinare l’approssimazione della funzione primitiva all’istante
tk+1 per mezzo della relazione
y(tk+1 ) = y(tk ) + hf (tk , y(tk ))
(2.29)
dove h è un opportuno intervallo di tempo fisso, ed il legame fra gli istanti
in cui si valuta la funzione primitiva è
tk+1 = tk + h
(2.30)
La 2.29, come in generale tutti i metodi di integrazione, permette di
determinare un insieme di valori {y1 , y2 , y3 , . . . , yn } della funzione primitiva,
con yk = y(tk ), in corrispondenza di un insieme di valori {t1 , t2 , t3 , . . . , tn }
della variabile di integrazione.
Il metodo di Eulero deriva dallo sviluppo in serie di Taylor, arrestato al
primo ordine, della primitiva y(t) nell’intorno destro dell’istante tk
¯
dy(t) ¯¯
y(tk + h) = y(tk ) +
(tk + h − tk ) = y(tk ) + f (tk , y(tk ))h (2.31)
dt ¯
t=tk
che rappresenta un’approssimazione della primitiva nell’intervallo h. Questo
metodo è detto esplicito in quanto permette di determinare direttamente il
valore della funzione yk+1 a partire da yk .
La valutazione della primitiva viene quindi fatta a passi, basandosi sul
valore della funzione calcolata al passo precedente. Per il primo passo vengono utilizzate le condizioni iniziali y(t0 ) = y0 espresse dalla 2.28; nella
tabella 2.1 vengono riportati alcuni passi dell’integrazione numerica con il
metodo di Eulero, la figura 2.9 ne rappresenta l’aspetto geometrico.
Esistono tecniche di integrazione più complesse, ma più precise, come il
metodo dei trapezi (implicito), che permette di determinare l’integrale con
la relazione
y(tk+1 ) = y(tk ) + 0.5h [f (tk , y(tk )) + f (tk+1 , y(tk+1 ))] .
(2.32)
Fra gli altri metodi si possono ricordare quelli Runge Kutta che calcolano
le derivate anche in punti intermedi dell’intervallo [tk − tk+1 ].
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
25
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
tk
t0
t1
t2
t3
y(tk )
y0
y1 = y0 + hf (t0 , y0 )
y2 = y1 + hf (t1 , y1 )
y3 = y2 + hf (t2 , y2 )
condizioni iniziali
Tabella 2.1: Passi dell’integrazione numerica con il metodo di Eulero
Figura 2.9: Interpretazione geometrica dell’integrazione numerica con il
metodo di Eulero
2.4.2
Applicazione all’equazione di moto
L’equazione di moto di un sistema ad un grado di libertà è un’equazione
differenziale del secondo ordine che può essere espressa, come visto nelle
relazioni 2.27 e 2.25, nella forma
α̈(t) = f (t, α, α̇) .
(2.33)
L’integrazione numerica di quest’equazione differenziale può essere ricondotta al caso dell’integrazione di equazioni differenziali del I ordine, e seguire
il metodo proposto in questo paragrafo.
Un’equazione differenziale del II ordine può essere ricondotta ad un sistema di equazioni differenziali del I primo ordine introducendo una variabile
d’appoggio ξ tale per cui
α̇ = ξ .
(2.34)
L’equazione differenziale 2.33 è riconducibile allora al sistema di due equazioni differenziali del I ordine
½
α̇ = ξ
.
(2.35)
ξ˙ = f (t, α, ξ)
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
26
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
tk
t0
t1
t2
Y (tk )
Y0
·
¸
·
α0
Y 1 = Y 0 + hẎ 0 =
+h
· ξ0 ¸
·
α1
Y 2 = Y 1 + hẎ 1 =
+h
ξ1
¸
ξ0
f (t0 , α0 , ξ0 ) ¸
ξ1
f (t1 , α1 , ξ1 )
Tabella 2.2: Passi dell’integrazione numerica dell’equazione di moto con il
metodo di Eulero
Per l’integrazione di questo sistema si dovranno introdurre due costanti di
integrazione che corrispondono ai valori iniziali delle funzioni da integrare
½
α(t0 ) = α0
ξ(t0 ) = ξ0 = α̇0
(2.36)
È possibile una rappresentazione matriciale di questo problema di integrazione. Introducendo il vettore
·
Y (t) =
α(t)
ξ(t)
¸
(2.37)
che rappresenta le funzioni integrali ricercate, il sistema di equazioni differenziali e le condizioni iniziali sono rappresentate dalla
·
Ẏ = f (t, Y ) →
α̇(t)
˙
ξ(t)
¸
·
ξ(t)
f (t, α, ξ)
=
¸
(2.38)
Y (t0 ) = Y 0
che rappresenta la forma matriciale della relazione 2.28.
L’integrazione numerica del sistema di equazioni differenziali del primo
ordine, può essere condotta con il metodo di Eulero, integrando contemporaneamente le equazioni. Indicando con
·
Yk =
αk
ξk
¸
(2.39)
la formula di integrazione di Eulero è
Y k+1 = Y k + Ẏ k h ,
(2.40)
mentre i passi di integrazione sono espressi dalle relazioni riportate nella
tabella 2.2.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
Figura 2.10:
motocicletta
27
Integrazione numerica dell’equazione di moto di una
Esempio numerico in ambiente Matlab
Viene riportato un semplice esempio dell’integrazione numerica dell’equazione di moto in ambiente Matlab, facendo riferimento al sistema presentato
in figura 2.10. La determinazione dell’equazione di moto può essere eseguita
con la procedura indicata in questo capitolo, si ottiene
α̈ =
Cm (α̇) − Fr R
Cm (α̇) − Kr (Rα̇)2 R
=
.
mR2
mR2
(2.41)
La coppia motrice Cm applicata è funzione della velocità della coordinata
libera, ha andamento parabolico come illustrato in figura. I parametri del
modello sono: Cm0 = 70 Nm, ω0 = 100 rad/s, R = 0.2 m, m = 90 kg,
2
Kr = 0.7 N/(m/s) . Le condizioni iniziali sono: α(0) = 0 e α̇(0) = 0.
Il programma di integrazione è costituito da una funzione principale
dinmoto.m riportata in figura 2.11. Nella prima parte vengono fissate le
condizioni iniziali ed il passo di integrazione, nella seconda viene eseguita
l’integrazione vera e propria tramite un ciclo for, mentre nell’ultima parte
vengono visualizzati i risultati.
La parte di integrazione utilizza il metodo di Eulero per l’integrazione
della velocità e dell’accelerazione, basandosi sull’accelerazione espressa dalla
2.41 valutata al passo di integrazione corrente, il cui valore numerico viene
determinato con la funzione acc.m riportata in figura 2.12. Questa funzione
determina il valore dell’accelerazione in funzione della derivata di ordine 0
e 1 della coordinata libera; il valore dell’accelerazione dipende inoltre dal
raggio R della ruota motrice.
La determinazione dell’accelerazione si basa su altre due funzioni, riportate in figura 2.13, che consentono il calcolo della forza resistente e della
coppia motrice in funzione della velocità α̇.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
28
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
function dinmoto
clear all
close all
%raggio della ruota
R = 0.2;
%%
t=0;
%tempo di integrazione
tend = 10;
%intervallo di integrazione
h=0.01;
%contatore cicli
cc=1;
%condizioni iniziali
%velocita’ e posizione nulla
alpha = 0;
dalpha = 0;
for t=0:h:tend
ddalpha=accbar(R,alpha, dalpha);
%integrazione velocita’
alpha = alpha + dalpha*h;
%integrazione accelerazione
dalpha = dalpha + ddalpha*h;
%
%salvo risultati nella matrice
ris(cc,:) = [t,alpha,dalpha,CoppiaMotrice(dalpha)];
%
t=t+h; %incremento la variabile di integrazione
cc = cc+1; %incremento il contatore dei cicli
end
%diagramma forze esterne
DiagrammiForzeEsterne(R);
%diagrammi dei resiltati
DiagrammiRisultati(ris);
return
Figura 2.11: Integrazione con il metodo di Eulero
function ddalpha=acc(R,alpha, dalpha)
%calcola l’accelerazione nota la posizione e la velocita’ della coordinata
%libera
%parametri :
%R: raggio della ruota
%alpha: coordinata libera
%dalpha: velocita’ della coordinata libera
%valore di ritorno: accelerazione della coordinata libera
%dati identificativi del modello
%massa
m=90;
%%
dx = R*dalpha; %velocita’ del baricentro
%calcolo della forza resistente e della coppia motrice
Fr = ForzaResistente( dx );
Cm = CoppiaMotrice(dalpha);
%calcolo dell’accelerazione
ddalpha = (Cm - Fr*R)/(m*R^2);
return;
Figura 2.12: Calcolo dell’accelerazione
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
29
function Fr=ForzaResistente(dx)
%calcola la forza resistente in funzione della velocita’ di avanzamento
%parametri: velocita’ di avanzamento
Kr = 0.7;
Fr = Kr*dx.^2;
return
function Cm=CoppiaMotrice(dalpha)
%calcola la coppia motrice in funzione della velocita’ di rotazione della
%ruota
Cm0 = 70;
w0 = 100;
Cm = Cm0*(1 - (dalpha/w0).^2);
return
Figura 2.13: Calcolo delle forze esterne
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
30
2.5
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
Equazioni di Lagrange
Le equazioni di Lagrange permettono la scrittura delle equazioni di moto
considerando il sistema nel suo complesso, esprimendo in un’opportuna forma il lavoro virtuale delle forze d’inerzia e delle forze esterne. L’effetto dei
campi di forza descritti da un’energia potenziale V , come ad esempio quelli
conservativi, è introdotto per mezzo dell’energia potenziale V .
Considerando un sistema ad un grado di libertà in cui la coordinata
libera è α, l’equazione di Lagrange è espressa dalla relazione
µ
¶
d ∂L
∂L
= Qα
(2.42)
−
dt ∂ α̇
∂α
in cui si è introdotta la funzione L = T − V (detta Lagrangiana) che rappresenta la differenza fra l’energia cinetica totale del sistema e l’energia
potenziale totale del sistema. La Lagrangiana è funzione della posizione α
e della velocità α̇ ed assume l’espressione generale
X
X1
Vj (α)
(2.43)
L(α, α̇) =
mi vi2 (α, α̇) −
2
j
i
in cui compare la somma delle energie cinetiche dei corpi che costituiscono il sistema e la somma di tutte le energie potenziali associate alle forze
applicate al sistema. Nel calcolo dell’energia cinetica si è fatto riferimento
alla massa generalizzata dei corpi, senza distinguere fra traslazioni di punti
di massa e rotazioni di corpi con momento d’inerzia diverso da zero. Nella
2.43 si è inoltre esplicitata la dipendenza dell’energia cinetica e potenziale
dalla derivata di ordine 0 e 1 della coordinata libera, senza introdurre delle
variabili fisiche di comodo per la descrizione del movimento dei punti di
massa o di applicazione delle forze esterne.
Il primo membro della 2.42 fa allora riferimento al lavoro virtuale delle
forze d’inerzia e dei campi di forza che ammettono potenziale, mentre il
secondo membro Qα fa riferimento al lavoro delle forze applicate al sistema
che non rientrano nel primo membro dell’equazione.
Il termine Qα prende il nome di componente lagrangiana della sollecitazione attiva
P
F k · δpk
Qα = k
(2.44)
δα
ed è determinabile come la somma dei lavori virtuali delle forze esterne
per una spostamento virtuale δα della coordinata libera diviso lo stesso
spostamento virtuale della coordinata libera. Ricordando quanto esposto
nel paragrafo 2.1, e ricordando che il lavoro virtuale è quello compatibile
con i vincoli e che gli spostamenti virtuali possono essere presi piccoli a
piacere, la 2.44 può essere espressa in termini di τ k = dsk /dα
X
Qα =
Fk · τk
(2.45)
k
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
2.5.1
31
Esempio
Facendo riferimento al manovellismo riportato in figura 2.8 ed allo sviluppo
dell’esercizio proposto nel paragrafo 2.3.1 viene determinata l’equazione di
moto con l’equazione di Lagrange. L’energia cinetica del manovellismo sarà
1
1
1
T = m1 (bα̇)2 + JG α̇2 + m2 ẋ2 ,
2
2
2
la dipendenza della velocità ẋ del corsoio è già stata determinata nel paragrafo 2.3.1
"
#
r2 sin(2α)
ẋ = r sin α + p
α̇ = τ2 (α)α̇
l2 − r2 sin2 α
per cui risulta
1
1
1
T = m1 (bα̇)2 + JG α̇2 + m2 τ22 α̇2 .
2
2
2
Il meccanismo giace nel piano orizzontale, nell’espressione della lagrangiana non compare quindi l’energia potenziale della forza peso, L = T .
Le derivate della lagrangiana che compaiono al primo membro della 2.42
risultano allora
∂
T = m1 b2 α̇ + JG α̇ + m2 τ22 α̇
∂
α̇
µ
¶
d
∂
dτ2
T = m1 b2 α̈ + JG α̈ + m2 (2τ2
α̇ + τ22 α̈)
dt ∂ α̇
dt
d
dt
d
dt
µ
µ
∂
T
∂ α̇
∂
T
∂ α̇
¶
= m1 b2 α̈ + JG α̈ + m2 (2τ2
dτ2 dα 2
α̇ + τ22 α̈)
dα dt
¶
= m1 b2 α̈ + JG α̈ + m2 (2τ2 γ2 α̇2 + τ22 α̈)
∂
dτ2 2
T = m2 τ2
α̇ = m2 τ2 γ2 α̇2
∂α
dα
Il primo membro dell’equazione di Lagrange risulta allora
m1 b2 α̈ + JG α̈ + m2 (τ2 γ2 α̇2 + τ22 α̈)
La componente lagrangiana della sollecitazione attiva Qα è
Qα = −Fr τ2 + Cm
e quindi l’equazione di lagrange porta all’equazione differenziale
α̈(m1 b2 + JG + m2 τ22 ) + m2 τ2 γ2 α̇2 = −Fr τ2 + Cm
riconducibile con semplici passaggi alla 2.27
α̈ =
−Fr τ2 + Cm − m2 τ2 γ2 α̇2
m1 b2 + JG + m2 τ22
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
32
CAPITOLO 2. EQUAZIONE DI MOTO PER SISTEMI AD UN GDL
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
Capitolo 3
Comportamento dinamico
in un intorno della
posizione di equilibrio
3.1
3.1.1
Esempi sulla scrittura delle equazioni di
moto
Manovellismo
Per il manovellismo presentato in figura 3.1 vengono proposti due metodi
per la scrittura dell’equazione di moto necessaria all’analisi dinamica in un
intorno della posizione di equilibrio. Si suppone che la lunghezza l della
biella sia molto più grande della lunghezza r della manovella. Con queste
ipotesi l’equazione 2.26 si semplifica e la posizione del corsoio a partire dal
punto morto esterno è descritta dalla relazione
x = r(1 − cos α)
in cui α è la rotazione della manovella, assunta come coordinata libera.
La molla è applicata al corsoio lungo la sua direzione di scorrimento,
ha lunghezza libera l0 , è fissata a terra in un punto che dista h dal punto
morto esterno lungo la direzione di scorrimento del corsoio. Nelle condizioni
di “molla scarica” il corsoio avrà allora la posizione xs = l0 − h a cui
corrisponde una rotazione della manovella
αs = arccos(1 − xs /r) .
33
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
34
Figura 3.1: Manovellismo
Bilancio di potenze
La posizione di equilibrio è individuata dal valore α0 della coordinata libera,
è determinabile dal principio dei lavori virtuali, che può essere espresso nella
forma
X
Fi · τi = 0 ,
dove la sommatoria è estesa a tutte le forze generalizzate applicate al sistema. Viene indicato con ~i il versore dell’asse x assunto come misura della
posizione del corsoio e con ~k il versore dell’asse perpendicolare ed uscente
dal piano del foglio. Quindi la coppia applicata alla manovella sarà espressa
dalla relazione C0 = C0~k, mentre la forza elastica applicata al corsoio sarà
F e = Fe (−~i) in cui Fe = k(x − xs ) = kr(cos αs − cos α).
I rapporti di trasmissione dei punti di applicazione delle forze esterne
risultano rispettivamente τ 3 = 1 ~k per la coppia applicata alla manovella,
e τ 2 (α) = dx/dα~i = r sin α~i per la forza elastica applicata al corsoio. La
posizione α0 di equilibrio è allora determinabile della relazione
C0 · τ 3 + F e · τ 2 = C0 − kr2 (cos αs − cos α0 ) sin α0 = 0 .
L’equazione di moto che descrive il comportamento dinamico in un
intorno della posizione di equilibrio è
m∗ ϕ̈ + k ∗ ϕ = 0
in cui
m∗ =
e
∗
k =−
X
Ã
X
τi20 mi
!
¯
dF i ¯¯
· τ i0 + F i0 · γ i0 .
dα ¯α=α0
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
35
Il rapporto di trasmissione del punto 2 ha modulo funzione di α (τ2 =
τ2 (α), mentre la sua direzione è fissa. Derivando allora il rapporto di trasmissione rispetto ad α si ottiene γ 2 (α) = r cos α~i. Applicando le relazioni viste ai punti di interesse indicati in figura 3.1 si ottiene per la massa
equivalente l’espressione
m∗ = m1 τ12 + m2 τ22 (α0 ) + JG ,
mentre la rigidezza equivalente è
!
Ã
¯
dFe ¯¯
∗
τ2 (α0 ) − Fe0 γ2 (α0 ) ,
k =− −
dα ¯α=α0
da cui
k ∗ = kr sin α0 r sin α0 + kr(cos αs − cos α0 )r cos α0
k ∗ = kr2 (sin2 α0 + cos αs cos α0 − cos2 α0 ) .
In quest’ultima relazione i termini cos αs cos α0 − cos2 α0 rappresentano
l’effetto dell’intensità della forza elastica nella posizione di equilibrio, quindi
in questo caso la rigidezza equivalente dipende anche dal valore delle forze che determinano la posizione di equilibrio. Infatti si osserva che se la
posizione di equilibrio coincidesse con la posizione di molla scarica (ovvero
α0 = αs e quindi C0 = 0), rimarrebbe
solamente l’effetto della variazione
¯
2
2
2¯
del modulo della forza esterna dF
dα α=α0 · τ 20 = kr sin α0 , essendo nullo il
valore della forza elastica nella posizione di equilibrio. La coppia C0 applicata alla manovella non compare nell’espressione della rigidezza equivalente
in quanto il rapporto di trasmissione che lega la rotazione della manovella
alla coordinata libera è costante (unitario).
Equazione di Lagrange
Le espressioni di m∗ e k ∗ possono essere ottenute seguendo anche l’approccio di Lagrange. Si dovranno scrivere le espressioni dell’energia cinetica
associata alle masse in movimento e quelle dell’energia potenziale associata
alle forze elastiche. Nel caso in cui le espressioni ottenute non siano rispettivamente delle forme quadratiche in α per l’energia potenziale ed in α̇ per
l’energia cinetica, l’applicazione dell’equazione di Lagrange 2.42 porterebbe
ad un’equazione di moto in generale non lineare con coefficienti non costanti.
L’analisi del comportamento dinamico in un intorno della posizione di
equilibrio statico, può essere efficacemente condotta operando sull’equazione
di moto linearizzata, in modo da ottenere un’equazione differenziale ordinaria a coefficienti costanti del secondo ordine. La forma linearizzata dell’equazione di moto può essere ottenuta sviluppando in serie di Taylor le
espressioni dell’energia cinetica e potenziale in un intorno della posizione di
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
36
equilibrio α0 , in modo che l’energia cinetica sia una forma quadratica in α̇
e l’energia potenziale una forma quadratica in α.
Per applicare la 2.42, che porta all’equazione di moto cercata, si farà
riferimento all’analisi cinematica sviluppata nella parte precedente, da cui
risulta ẋ = dx/dαα̇ = τ2 (α)α̇. L’energia potenziale associata alla molla è
V =
1
1
k(x − xs )2 = kr2 (cos αs − cos α)2 ,
2
2
l’energia cinetica è
T =
1
1
1
1
(JG + md2 )α̇2 + m2 ẋ2 = (JG + md2 )α̇2 + m2 (r sin αα̇)2 ,
2
2
2
2
mentre la componente lagrangiana della sollecitazione attiva è
Qα = C0 .
Per la determinazione della posizione di equilibrio statico possiamo far
riferimento ancora alla 2.42, annullando l’energia cinetica, T = 0. La posizione di equilibrio statico α0 cercata è allora determinabile dalla relazione
∂V
= Qα
∂α
da cui risulta
kr2 (cos αs − cos α0 ) sin α0 = C0 ,
come precedentemente già ottenuto.
L’espressione dell’energia cinetica T e potenziale V trovate non sono
rispettivamente una forma quadratica in α̇ e in α. Si procede allora al loro
sviluppo in serie di Taylor in un intorno della posizione di equilibrio; per
l’energia cinetica si considererà la funzione approssimante
T̃ (α) = T (α0 ) + O0 =
1
(JG + md2 + m2 r2 sin2 α0 )α̇2
2
che risulta una forma quadratica in α̇. Per l’energia potenziale si considererà
la funzione approssimante
¯
¯
∂V ¯¯
1 ∂ 2 V ¯¯
Ṽ (α) = V (α0 ) +
(α
−
α
)
+
(α − α0 )2 + O2
0
∂α ¯α=α0
2 ∂α2 ¯α=α0
quadratica in α.
Considerando L = T̃ − Ṽ ed applicando la 2.42 otteniamo
d ∂
d ∂
L=
T̃ = (JG + md2 + m2 r2 sin2 α0 )α̈ = m∗ α̈
dt ∂ α̇
dt ∂ α̇
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
37
in cui si riconosce l’espressione di m∗ precedentemente determinata.
"
#
¯
¯
∂
∂
∂V ¯¯
∂ 2 V ¯¯
L = − Ṽ = −
+
(α − α0 ) =
∂α
∂α
∂α ¯α=α0
∂α2 ¯α=α0
= −kr2 (cos αs − cos α0 ) sin α0 + . . .
£
¤
−kr2 sin2 α0 + (cos αs − cos α0 ) cos α0 (α − α0 ) .
Applicando ora la 2.42 si ottiene l’equazione differenziale ordinaria del
secondo ordine
2
m∗ α̈ + kr
αs − cos α0 ) sin α0 + . . . ¤
£ (cos
2
+kr sin2 α0 + (cos αs − cos α0 ) cos α0 (α − α0 ) = C0
in cui i termini kr2 (cos αs −cos α0 ) sin α0 e C0 si elidono a vicenda in quanto
rappresentano la condizione di equilibrio precedentemente determinata.
Rimane allora
£
¤
m∗ α̈ + kr2 sin2 α0 + (cos αs − cos α0 ) cos α0 (α − α0 ) = 0 ,
nella quale introducendo la variabile ϕ = α−α0 , che descrive lo spostamento
dalla posizione di equilibrio statico, da cui risulta ϕ̈ = α̈, si ottiene
m∗ ϕ̈ + k ∗ ϕ = 0
in cui
£
¤
k ∗ = kr2 sin2 α0 + (cos αs − cos α0 ) cos α0
come precedentemente determinato.
3.1.2
Pendolo
Il pendolo presentato in figura 3.2 è posto nel piano verticale, e si assume
come coordinata libera la rotazione α del pendolo misurata a partire dalla
direzione verticale. La molla di costante elastica k sia “scarica” per una
rotazione α = αs del pendolo.
La posizione di equilibrio può essere determinata imponendo l’equilibrio
alla rotazione attorno alla cerniera o. La forza elastica Fe dovuta all’allungamento della molla risulta Fe = k∆l = kR(α − αs ). Il momento dovuto
al richiamo elastico della molla risulta M1 (α) = kR(α − αs )R in senso antiorario, mentre quello dovuto alla forza peso è M2 (α) = mgl sin α in senso
orario. Nella condizione di equilibrio i momenti citati si devono bilanciare
M1 (α) = M2 (α) da cui, risolvendo in α si ricava la posizione di equilibrio
α0 . Risulta
kR(α − αs )R = mgl sin α
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
38
Figura 3.2: Pendolo inverso
la cui risoluzione è rappresentata dal punto di vista geometrico in figura 3.3.
L’equazione di moto descrivente il comportamento dinamico in un intorno della posizione di equilibrio viene determinato sia con l’equazione del
bilancio di potenze linearizzata in un intorno della posizione di equilibrio,
sia con il metodo energetico.
Bilancio di potenze
L’analisi cinematica per la determinazione di τ e γ deve essere condotta per
i punti 1 e 2 di figura 3.2, in quanto ad essi sono applicate forze esterne
o descrivono la posizione di punti di massa. Per il punto 1 il rapporto di
trasmissione ha direzione costante (come mostrato in figura) e modulo R.
Infatti la sua velocità risulta v1 = Rα̇ con direzione costante, per cui τ1 = R.
Per il punto 2 il rapporto di trasmissione ha modulo costante. Infatti la sua
velocità risulta v2 = lα̇ con direzione variabile, per cui τ2 = l. La derivata
del rapporto di trasmissione rispetto ad α sarà allora diversa da zero (varia
la direzione). Ricordando la 2.19 risulterà γ2 = l diretto verso il centro di
rotazione del pendolo.
Calcolati i parametri cinematici è ora possibile determinare la massa e
la rigidezza equivalente. La massa equivalente risulta
m∗ =
X
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
τi20 mi = l2 m
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
39
Figura 3.3: Soluzione grafica per la posizione di equilibrio del pendolo di
figura 3.2
mentre la rigidezza equivalente
Ã
!
¯
P dF i ¯¯
∗
k = −
· τ i0 + F i0 · γ i0 =
dα ¯α=α0
= − [−kRτ1 + mgl cos α0 ] = kR2 − mgl cos α0 .
L’equazione cercata è allora
ml2 ϕ̈ + (kR2 − mgl cos α0 )ϕ = 0 .
Si osservi che il sistema è stabile se k ∗ > 0, ovvero se kR2 > mgl cos α; facendo riferimento alla figura 3.3, questa circostanza si verifica allora quando
la curva M1 (α) interseca la curva M2 (α) con una pendenza maggiore. Infatti kR2 rappresenta la pendenza della curva M1 , mentre il termine mgl cos α
rappresenta la pendenza della curva M2 . In particolare quando αs = 0,
ovvero quando nella posizione di molla scarica il pendolo è allineato alla
direzione verticale, le curve citate hanno due punti di intersezione, A e B.
Nella posizione di equilibrio A risulterà k ∗ < 0 ed è perciò di equilibrio
instabile; in B risulta invece k ∗ > 0 e la posizione di equilibrio è allora
stabile.
Metodo energetico
Per applicare il metodo energetico si devono determinare le espressioni
dell’energia cinetica e dell’energia potenziale associate al sistema.
L’espressione dell’energia cinetica risulta
T =
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
1
m(lα̇)2 .
2
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
40
Per il calcolo dell’energia potenziale si deve tenere conto della molla e
del campo gravitazionale terrestre. Risulta allora
V =
1
1
1
1
k(∆l)2 + mg(z0 + lcosα) = kR2 (α − αs )2 + mg(z0 + lcosα)
2
2
2
2
in cui z0 è la quota di riferimento per la misura delle altezze.
L’espressione dell’energia cinetica è gia una forma quadratica in α̇, e non
viene quindi approssimata in un intorno della posizione di equilibrio.
L’energia potenziale deve essere sviluppata in serie di Taylor in un intorno della posizione di equilibrio α0 per ricondurla ad una forma quadratica
in α. Si considererà la funzione approssimante
¯
¯
∂V ¯¯
1 ∂ 2 V ¯¯
Ṽ = V (α0 ) +
(α − α0 ) +
(α − α0 )2 .
∂α ¯α0
2 ∂α2 ¯α0
Considerando L = T − Ṽ ed applicando l’equazione di Lagrange si
ottiene:
d ∂
L = ml2 α̈ ,
dt ∂ α̇
¯
¯
∂V ¯¯
∂ 2 V ¯¯
∂
L = −
−
(α − α0 ) =
∂α
∂α ¯α0
∂α2 ¯α0
= −kR2 (α0 − αs ) + mgl sin α0 + (−kR2 + mgl cos α0 )(α − α0 ) ,
in cui il termine −kR2 (α0 −αs )+mgl sin α0 si annulla in quanto rappresenta
le condizioni di equilibrio.
Introducendo la variabile ϕ = α − α0 l’equazione di moto risulta allora:
ml2 ϕ̈ + (kR2 − mgl cos α0 )ϕ = 0 .
3.2
Risoluzione dell’equazione di moto
L’analisi dinamica in un intorno della posizione di equilibrio viene allora
eseguita studiando l’equazione differenziale ordinaria del II ordine
m∗ ϕ̈ + k ∗ ϕ = 0
(3.1)
in cui ϕ rappresenta lo spostamento del sistema misurato a partire dalla
posizione di equilibrio. Nel seguito si studieranno sistemi stabili per i quali
risulta k ∗ > 0.
Nei prossimi paragrafi verranno studiate alcuni soluzioni del problema
dinamico a partire della 3.1.
Per facilitare l’interpretazione fisica dei risultati che si otterranno faremo
riferimento al modello di un sistema semplice, per il quale è immediato il
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
41
Figura 3.4: Modello per lo studio delle vibrazioni
contributo delle forze applicate, ma che porta sempre alla stessa equazione
di moto 3.1. Facendo riferimento alla figura 3.4, l’equazione di moto che descrive il comportamento dinamico in un intorno della posizione di equilibrio
è
m∗ ẍ + k ∗ x = 0
(3.2)
coincidente con la 3.1, sostituendo x a ϕ.
3.2.1
Vibrazioni libere
L’equazione differenziale 3.2 rappresenta il comportamento dinamico di un
sistema ad un grado di libertà non dissipativo, al quale cioè non sono applicate forze che dissipano energia, la soluzione x(t) potrà essere determinata
fissando le condizioni iniziali (condizioni al contorno) al tempo t = 0
x(0) = xt0
(3.3)
ẋ(0) = ẋt0
La forma generale della soluzione è rappresentata dall’espressione
x(t) = zeλt
(3.4)
in cui i valori di λ dipendono dai coefficienti dell’equazione differenziale,
mentre la variabile complessa z dipende dalle condizioni iniziali.
I valori di λ si determinano sostituendo la 3.4 e la sua derivata seconda
nella 3.1, si ottiene
m∗ λ2 zeλt + k ∗ zeλt = 0 ,
(3.5)
da cui si ottiene un’equazione algebrica di secondo grado in λ
m∗ λ2 + k ∗ = 0 ,
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
(3.6)
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
42
Figura 3.5: Soluzione vettoriale
le cui soluzioni complesse coniugate sono
p
λ1,2 = ±i k ∗ /m∗
(3.7)
avendo considerato
k ∗ > 0 ed essendo m∗ > 0.
p
Il termine k ∗ /m∗ è una caratteristica del sistema in studio, è funzione
dei coefficienti dell’equazione di moto, viene indicata con ω0 e prende allora
il nome di pulsazione propria del sistema.
λ1,2 = ±iω0
(3.8)
La soluzione generale assumerà allora la forma
x(t) = z1 eλ1 t + z2 eλ2 t = z1 eiω0 t + z2 e−iω0 t .
(3.9)
Le due costanti di integrazione z1 e z2 sono determinate imponendo le
condizioni iniziali
½
½
z1 + z2 = xt0
x(0) = xt0
z1 + z2 = xt0
ẋt
⇒
⇒
.
ẋ(0) = ẋt0
z1 iω0 − z2 iω0 = ẋt0
z1 − z2 = −i 0
ω0
(3.10)
Le variabili complesse z1 e z2 sono allora complesse coniugate (la somma
porta ad un numero reale, mentre la differenza ad un numero puramente
immaginario), per cui sono facilmente determinabili e risultano
µ
¶
ẋt0
1
x
−
i
z
=
t0
1
2
ω0
(3.11)
µ
¶
1
ẋ
t
0
xt0 + i
z2 =
2
ω0
La soluzione x(t) ha allora anche una rappresentazione geometrica, può
essere vista come la somme di due vettori z1 eiω0 t e z2 e−iω0 t rotanti nel piano
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
43
Figura 3.6: Soluzione per xt0 6= 0, ẋt0 = 0
complesso, rispettivamente con velocità ω0 e −ω0 , come presentato in figura
3.5. La soluzione x(t) è allora reale, la somma dei vettori controrotanti giace
sull’asse reale, ed è possibile esprimere la soluzione x(t) come la proiezione
sull’asse reale di un vettore parallelo a z1 , di modulo C e rotante nel piano
complesso con velocità ω0 . Risulta allora
x(t) = C cos(ω0 t + φ)
(3.12)
in cui φ rappresenta l’anomalia del vettore proiettato all’istante t = 0. La
direzione del vettore all’istante iniziale coincide con quella del vettore z1 ,
risulta allora
µ
¶
ẋt /ω0
φ = arctan − 0
.
(3.13)
xt0
Il modulo C del vettore considerato avrà, per costruzione geometrica, un
valore doppio rispetto al modulo dei vettori z1 e z2 , risulterà
q
C = 2|z1 | = 2|z2 | = x2t0 + (ẋt0 /ω0 )2 .
(3.14)
La soluzione ha andamento armonico la cui ampiezza C dipende dalle
condizioni iniziali imposte, mentre il periodo T0 = 2π/ω0 dipende dai coefficienti dell’equazione di moto massa m∗ e rigidezza k ∗ equivalente, e quindi
dalle caratteristiche fisiche del sistema analizzato. La soluzione trovata descrive allora un’oscillazione attorno alla posizione di equilibrio della massa
di figura 3.4, con una frequenza fn = 1/T0 dipendente dalle caratteristiche
del sistema, e con un’ampiezza funzione della perturbazione iniziale.
Nel caso in cui sia nulla la velocità iniziale, ẋt0 = 0, e diverso da zero lo
spostamento iniziale, risulta φ = 0, si ottiene la risposta riportata in figura
3.6. In questo caso, a partire dalla condizione di equilibrio, la massa viene
portata nella posizione xt0 e qui lasciata libera. La massa allora oscilla
attorno alla posizione di equilibrio con un’ampiezza pari a xt0 e con una
frequenza fn .
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
44
Figura 3.7: Soluzione per xt0 = 0, ẋt0 6= 0
Nel caso in cui sia diversa da zero la sola velocità iniziale ẋt0 , risulta
φ = −π/2, e l’andamento di x(t) è riportato in figura 3.7. In questo caso
nelle condizioni di equilibrio viene imposta alla massa una velocità iniziale
ẋt0 , allora essa inizia ad oscillare attorno alla posizione di equilibrio con
un’ampiezza pari a ẋt0 /ω0 e con una frequenza fn .
cosa accade alla forza totale ???
La soluzione x(t) può essere espressa anche in un’altra forma, infatti,
ricordando la formula di addizione degli angoli per il coseno, dalla 3.12 si
ottiene
x(t) = C cos φ cos(ω0 t) − C sin φ sin(ω0 t)
(3.15)
e quindi
x(t) = A cos ω0 t + B sin ω0 t
(3.16)
B
−C sin φ
B
=
⇒ tan φ = − ,
A
C cos φ
A
(3.17)
per cui dalla 3.13 risulta
B
ẋt /ω0
= 0
.
A
xt0
(3.18)
In definitiva si ottiene allora
x(t) = xt0 cos ω0 t +
ẋt0
sin ω0 t .
ω0
(3.19)
Questa relazione poteva ovviamente essere ottenuta dalla 3.16 imponendo
le condizioni iniziali espresse dalla 3.3.
La soluzione x(t) può allora essere espressa in tre forme equivalenti:
x(t) =
x(t) =
x(t) =
z1 eiω0 t + z2 e−iω0
A cos ω0 t + B sin ω0 t
C cos(ω0 t + φ) = <{Ceiφ eiω0 t }
(3.20)
(3.21)
(3.22)
(3.23)
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
45
Per i casi rappresentati dal modello di figura 3.4, la pulsazione propria ω0
può essere determinata tramite la misura della deformata della molla nelle
condizioni di equilibrio, dovuta all’azione della forza peso. Nella condizioni
di equilibrio la molla ha subito, a partire della configurazione indeformata,
un allungamento
mg
(3.24)
δst =
k
e ricordando l’espressione di ω0 risulta
r
r
p
mg/δst
g
ω0 = k/m =
=
.
(3.25)
m
δst
L’analisi della soluzione x(t) ottenuta mette in evidenza che l’ampiezza
di oscillazione è costante, fissata dalle condizioni iniziali permane per un
tempo infinito una volta che l’oscillazione è stata innescata. L’ampiezza di
oscillazione costante mette in evidenza che l’energia totale del sistema si
conserva.
Questo comportamento non corrisponde alla rilevazione sperimentale dei
fenomeni vibratori, per i quali la vibrazione, una volta innescata, si esaurisce
in un certo intervallo di tempo, dissipando tutta l’energia introdotta fissando
le condizioni iniziali di moto. Si tratterà allora di inserire nel modello fino
ad ora utilizzato degli effetti dissipativi, in modo che si possa rappresentare
la riduzione dell’ampiezza di oscillazione libera della massa.
3.2.2
Vibrazioni smorzate
L’energia dissipata ciclo per ciclo durante la vibrazione del sistema può
dipendere da varie cause, può essere funzione dello spostamento, funzione
della velocità, degli sforzi interni del materiale oppure può dipendere da
fenomeni di isteresi. Si tratta di introdurre l’effetto della dissipazione di
energia in modo conveniente nell’equazione di moto 3.2, il modello che porta
alla più semplice soluzione analitica dell’equazione di moto è quello detto
dello smorzatore viscoso equivalente, il quale prevede di considerare una
forza proporzionale alla velocità di deformazione dello smorzatore in verso
opposto alla velocità di deformazione. Facendo riferimento alla figura 3.8 la
forza dissipativa risulta
F d = −rẋ~i
(3.26)
e l’energia dissipata nell’unità di tempo è
Wd = F d · ẋ~i = −rẋ2
(3.27)
Il parametro r è detto coefficiente di smorzamento ed il suo valore sarà
opportunamente calcolato in modo che lo smorzatore equivalente dissipi,
per ogni ciclo di oscillazione, la stessa energia che dissipa il sistema reale
rappresentato dal modello.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
46
Figura 3.8: Caratteristica e simbolo dello smorzatore viscoso equivalente
Figura 3.9: Modello smorzato per lo studio delle vibrazioni
Introducendo nel modello 3.4 uno smorzatore viscoso equivalente, in parallelo alla molla di rigidezza k come indicato nella figura 3.9, l’equazione di
moto che descrive il comportamento dinamico in un intorno della posizione
di equilibrio risulta
mẍ + rẋ + kx = 0 .
(3.28)
Nella scrittura dell’equazione di moto l’effetto della forza di smorzamento
viscoso può essere introdotto considerando il lavoro virtuale compiuto dalle
forze dissipative per un incremento virtuale della coordinata libera, diviso
l’incremento virtuale della coordinata libera, ovvero
X
F dj · τ j .
(3.29)
Nell’applicazione dell’equazione di Lagrange questo contributo compare nella scrittura della componente Lagrangiana della sollecitazione attiva Qα .
Si osservi che la forza dissipativa introdotta è nulla nella posizione di
equilibrio e non dipende dalla coordinata libera, per cui essa non compare
nella scrittura della rigidezza equivalente.
La soluzione x(t) dell’equazione differenziale 3.28 è del tipo x(t) = zeλt ;
sostituendola assieme alle sue derivate prima e seconda nella 3.28 si ottiene
l’equazione algebrica del secondo ordine in λ
λ2 m + rλ + k = 0 .
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
(3.30)
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
47
x(t)
xt0 = 1, ẋt0 = 0
xt0 = 1, ẋt0 = 20
xt0 = 1, ẋt0 = −80
t
Figura 3.10: Risposte con indice di smorzamento h = 2
Dividendo ambo i membri dell’equazione per m si ottiene
λ2 + 2hω0 λ + ω02 = 0
(3.31)
in cui al rapporto r/m si è sostituito l’espressione
r
2rω0
=
= 2hω0 .
m
2mω0
(3.32)
Il parametro
r
r
=
(3.33)
2mω0
rc
è detto indice di smorzamento ed è definito come il rapporto fra il coefficiente
di smorzamento equivalente ed in coefficiente di smorzamento critico rc =
2mω0 .
Le soluzioni dell’equazione algebrica 3.31 sono espresse dalla relazione
q
³
´
p
λ1,2 = −hω0 ± h2 ω02 − ω02 = ω0 −h ± h2 − 1
(3.34)
h=
e possono essere, in funzione del valore di h, reali distinte, reali coincidenti
o complesse coniugate.
³
´
p
h > 1 soluzioni reali distinte λ1,2 = ω0 −h ± |h2 − 1| :
La soluzione
x(t) = z1 eλ1 t + z2 eλ2 t
dell’equazione di moto ha λ1 < 0 , λ2 < 0; è allora la somma
di due funzioni esponenziali decrescenti. Qualsiasi sia il valore delle
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
48
x(t)
xt0 = 1, ẋt0 = 0
xt0 = 1, ẋt0 = 20
xt0 = 1, ẋt0 = −80
t
Figura 3.11: Risposte con smorzamento critico
condizioni iniziali che fissano le costanti complesse z1 , z2 , il moto
della massa non potrà mai essere oscillatorio, non potranno perciò
mai nascere delle vibrazioni. Imponendo le condizioni iniziali 3.3, si
ottiene
−xt0 λ2 + ẋt0 λ1 t
xt λ1 − ẋt0 λ2 t
√
x(t) =
e + 0√
e
(3.35)
2
2ω0 h − 1
2ω0 h2 − 1
La figura 3.10 presenta l’andamento di x(t) per tre diverse condizioni
iniziali.
h = 1 soluzioni reali coincidenti λ1,2 = −ω0 h:
In questo caso è h = 1, ovvero il coefficiente di smorzamento coincide
con il coefficiente di smorzamento critico, r = rc . La soluzione x(t) è
allora rappresentata dalla forma generale
x(t) = (A + Bt) e−ω0 t
(3.36)
in cui le costanti A e B devono essere determinate imponendo le
condizioni iniziali 3.3, si ottiene
x(t) = [xt0 + (ẋt0 + ω0 xt0 )t] e−ω0 t .
(3.37)
La risposta in condizioni di smorzamento critico è quella che permette
di raggiungere la posizione di equilibrio nel minor tempo senza oscillazioni, al massimo attraversando una volta la posizione di equilibrio.
La figura 3.11 presenta la risposta per tre diverse condizioni iniziali.
Si osserva che solo per condizioni iniziali che prevedono velocità verso
la posizione di equilibrio lo spostamento x è tale per cui si oltrepassa
la posizione x = 0 di equilibrio.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
49
√
¡
¢
h < 1 soluzioni complesse coniugate λ1,2 = ω0 −h ± i 1 − h2 :
Indicando con
p
ω1 = ω0 1 − h2
(3.38)
la soluzione dell’equazione di moto risulta
£
¤
x(t) = z1 e(−hω0 +iω1 )t + z2 e(−hω0 −iω1 )t = e−hω0 t z1 eiω1 t + z2 e−iω1 t
(3.39)
Ricordando lo sviluppo della 3.9 la soluzione dell’equazione di moto
può essere espressa nelle forme
x(t) = e−hω0 t (A cos ω1 t + B sin ω1 t)
(3.40)
x(t) = e−hω0 t C cos(ω1 t + φ)
(3.41)
in cui le costanti A e B o C e φ devono essere determinate imponendo
le condizioni iniziali 3.3, ad esempio per la 3.40 si ottiene
µ
¶
ẋt − ω0 hxt0
x(t) = e−hω0 t xt0 cos ω1 t + 0
sin ω1 t
(3.42)
ω1
La soluzione x(t) è espressa come il prodotto di due funzioni: La prima è un esponenziale descrescente e−hω0 t
e−hω0 t
t
mentre la seconda rappresenta un moto armonico A cos ω1 t+B sin ω1 t,
quindi di periodo T1 = 2π/ω1
A cos ω1 t + B sin ω1 t
t
Il prodotto fra le due porta allora ad una soluzione oscillante la cui
ampiezza via via si riduce con il passare del tempo.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
50
e−hω0 t (A cos ω1 t + B sin ω1 t)
t
Il periodo di oscillazione T1 dipende essenzialmente da m∗ e k ∗ , la
velocità con cui le oscillazioni si smorzano dipende dal coefficiente di
smorzamento r∗ e dalla massa m∗ , infatti hω0 = r∗ /(2m∗ ).
Considerazioni sull’indice di smorzamento - Decremento logaritmico
L’effetto dell’indice di smorzamento h sulla riduzione dell’ampiezza di oscillazione può essere valutato considerando il rapporto fra l’ampiezza di oscillazione di due periodi consecutivi (figura 3.12). Indicando con xa0 l’ampiezza di oscillazione del primo periodo e con xa1 l’ampiezza di oscillazione
del periodo successivo, in questo caso il secondo, si definisce decremento
logaritmico δ l’espressione
xa
δ = ln 0 .
(3.43)
xa1
La misura delle ampiezze di oscillazione xa0 e xa1 viene eseguita in due
istanti di tempo che distano fra di loro un intervallo di tempo T1 , pari al
periodo di oscillazione. Indicando con t̄ il tempo in cui si misura l’ampiezza
di oscillazione xa0 e ricordando la 3.40 risulta
δ = ln
x(t̄)
h2π
= ln ehω0 T1 = hω0 T1 = √
.
x(t̄ + T1 )
1 − h2
(3.44)
Se si considera il rapporto fra ampiezze di oscillazione la cui distanza è
pari ad un numero n di periodi di oscillazione
xa
xa
xa
xa
ln 0 = ln 0 + ln 1 + . . . + ln n−1
(3.45)
xan
xa1
xa2
xan
risulta allora
x a0
h2π
= nδ = n √
.
(3.46)
xan
1 − h2
Da quest’ultima espressione si ottiene una semplice relazione che lega
il numero di periodi di oscillazioni n necessari affinchè l’ampiezza di oscillazione si dimezzi, e l’indice di smorzamento h. Infatti considerando nella
3.46 ln xa0 /xan = ln 2, ed ipotizzando h << 1, si ottiene
ln
ln 2 = nh2π
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
⇒
nh ' 0.11 .
(3.47)
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
51
x(t)
xa0
xa1
xa2
x a3
t
Figura 3.12: Calcolo decremento logaritmico
La figura 3.13 rappresenta il legame fra n e h nel caso in cui n periodi
di oscillazione portino al dimezzamento dell’ampiezza di oscillazione.
3.3
Rigidezza degli elementi elastici
Nei modelli introdotti, la rigidezza lineare degli elementi elastici meccanici
è stata indicata con k, tale che
Fe = k∆l ,
in cui ∆l è deformazione dell’elemento elastico. Pochi solo gli elementi meccanici che mettono in evidenza un comportamento elastico lineare,
in generale l’andamento della reazione esercitata dell’elemento meccanico
in funzione della sua deformazione ha un andamento non lineare come ad
esempio rappresentato in figura 3.14. Nello studio delle vibrazioni si è interessati all’analisi del comportamento dinamico in un intorno della posizione
di equilibrio, ad esempio quella indicata con A nella figura, per ricondurre il problema allo studio di un sistema lineare. In quest’intorno è allora
possibile considerare una linearizzazione del comportamento elastico dell’elemento meccanico, ed utilizzare quindi la pendenza della tangente alla
curva forza-deformazioni nel punto A, rappresentata dal parametro K di
figura.
La rigidezza lineare K introdotta tiene conto della cedevolezza del sistema in studio, ed il modello in cui viene inserita è tanto più rappresentativo
del sistema effettivo tanto più la massa della parte elastica è piccola rispetto alla massa equivalente concentrata in un determinato punto. La tabella
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
52
n
25
20
15
10
5
0
0
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09
0.1
h
Figura 3.13: Numero n di periodi dopo i quali l’ampiezza di oscillazione si
dimezza, in funzione dell’indice di smorzamento h
3.1 indica le rigidezze di alcuni elementi meccanici valutata per piccoli spostamenti lineari o torsionali in un intorno della posizione indicata. Tale
valore di rigidezza può essere efficacemente utilizzato per tutti quei modelli
nei quali la massa dell’elemento elastico è molto più piccola rispetto alla
massa ad esso collegata. Se questa condizione non è verificata, nello studio
delle vibrazioni si dovrà tenere conto anche della massa distribuita lungo
l’elemento elastico. Nella tabella si è indicato con I il momento d’inerzia
della sezione rispetto all’asse neutro, mentre con Jp il momento polare della
sezione. La tabella 3.2 indica le espressioni di I e JP per alcune semplici
sezioni.
Figura 3.14: Caratteristica non lineare forza/deformazioni
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
53
Elementi elastici attraversati dalla stessa forza F sono detti in serie
(figura 3.15), in tal caso la deformata di ciascun elementoPelastico è δi =
F/ki , mentre la rigidezza equivalente è tale per cui F = keq δi ; la costante
elastica equivalente risulta allora
X 1
1
=
.
keq
ki
(3.48)
Elementi elastici che subiscono la stessa deformazione δ sono detti in parallelo. (figura 3.15), In questa circostanza la forza dovuta a ciascun elemento elastico
è Fi = ki δ, mentre la rigidezza equivalente è tale per cui
P
keq δ = Fi , e risulta
X
keq =
ki .
(3.49)
Figura 3.15: Rigidezze in serie ed in parallelo
3.3.1
Esempi
Pendolo torsionale
Figura 3.16: Pendolo torsionale
Il pendolo torsionale di figura 3.16 è costituito da due alberi, le cui
caratteristiche geometriche sono riportate in figura, uno consecutivo all’altro, che collegano un volano simmetrico ed omogeneo di massa M , e diametro D a terra. Il volano è allora caratterizzato dal momento d’inerzia
2
J = M πd8 [ kgm2 ]. Gli alberi hanno massa trascurabile rispetto a quella
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
54
del volano, perciò costituiscono due rigidezza concentrate poste in serie,
rispettivamente
GJp1
GJp2
k1 =
, k1 =
l1
l2
in cui G è il modulo di elasticità tangenziale del materiale costituende gli
alberi. Nell’insieme il pendolo torsionale è allora rappresentabile come una
rigidezza torsionale equivalente
kt =
k1 k2
k1 + k2
che vincola il volano a terra. Considerando la coordinata θ che descrive la
rotazione del volano, l’equazione di moto in un intorno della posizione di
equilibrio è allora
J θ̈ + kt θ = 0 .
Verricello
Figura 3.17: Verricello
La figura 3.17 rappresenta un verricello posto all’estremità di una mensola incastrata. La mensola ha sezione rettangolare uniforme come indicato
in figura, lunghezza l1 . La massa della mensola e quella del tamburo del
verricello sono trascurabili rispetto a alla massa M del carico trattenuto dal
verricello. La fune utilizzata per tenere sospeso il carico ha diametro d e,
per la configurazione analizzata, è svolta per un tratto l2 dal tamburo.
La rigidezza vista dal carico M è quella dovuta alla flessione della mensola incastrata e alla deformazione della fune che sorregge il carico. Considerando solo l’effetto di abbassamento dell’estremo libero della mensola,
dovuto ad un carico concentrato applicato all’estremità della mensola, la
rigidezza dovuta alla mensola è
k1 = 3
EI
E bh3
=
3
l13
l13 12
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
[ N/m] .
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
55
La rigidezza dovuta alla cedevolezza della fune è invece
k2 =
EA
Eπd2 /4
=
l2
l2
[ N/m] .
Queste due rigidezze sono fra loro poste in serie, per cui sono equivalenti ad
una rigidezza
k1 k2
.
kl =
k1 + k2
L’equazione di moto in un intorno della posizione di equilibrio è allora
M ẍ + kl x = 0
in cui x descrive l’abbassamento del carico.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
56
EA
l
Gd4
64nR3
3EI
l3
3EIl
a2 b2
GJp
l
12EI
l3
24EI
l3
Tabella 3.1: Rigidezza in un intorno della posizione indeformata di alcuni
elementi meccanici
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
57
Ix =
πd4
64
Ix =
bh3
12
,
Jp =
πd4
32
Tabella 3.2: Momenti d’inerzia per sezioni semplici
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 3. COMPORTAMENTO DINAMICO IN UN INTORNO DELLA POSIZIONE
DI EQUILIBRIO
58
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
Capitolo 4
Sistemi ad un grado di
libertà forzato
Nel caso in cui siano applicate delle forze variabili nel tempo, come presentato in figura 4.1, il sistema è detto forzato. Questa è una situazione
abituale in una grande classe di dispositivi meccanici. Si pensi ad esempio
alle forze applicate al telaio di un veicolo dal motore, alle forze esercitate da masse eccentriche rotanti, ecc. L’effetto introdotto dalla forza F (t)
sul moto del sistema, e quindi sulla deformazione delle parti elastiche, risulterà essere funzione sia dell’intesità della forza sia del sua variabilità in
funzione del tempo. Si cercherà di introdurre una metodologia sistematica
per l’approccio a questo tipo di problemi, ed in particolare faremo sempre
riferimento a sistemi lineari o linearizzati in un intorno della posizione di
equilibrio. Come visto nel capitolo 3, l’equazione di moto per questo tipo di
sistemi è descritta da un’equazione differenziale ordinaria del II ordine.
Per generalità si prenderà in considerazione una forzante di tipo sinusoidale, come mostrato in figura 4.1, con espressione generale F0 sin Ωt,
in cui F0 è l’ampiezza della forza generalizzata applicata, con andamento
sinusoidale di periodo T = 2π/Ω.
I risultati che otterremo si potranno estendere a tutti i tipi di forzanti, in
quanto esse possono essere espresse come somma di funzioni sinusoidali per
mezzo della serie di Fourier. Facendo riferimento a sistemi lineari la risposta
complessiva risulterà allora la somma delle risposte dovute ai singoli termini
dello sviluppo in serie di Fourier.
Si cercherà di mettere in evidenza il rapporto fra la variazione δst che
subirebbe la coordinata libera se venisse applicata una forza costante di
modulo F0 , e l’ampiezza di oscillazione in un intorno della posizione di
equilibrio dovuta all’applicazione della forzante F (t) = F0 sin Ωt.
59
60
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
Figura 4.1: Modello per lo studio delle vibrazioni forzate
4.1
Forzanti armoniche
Facendo allora riferimento al sistema rappresentato in figura 4.1, l’equazione
di moto che ne descrive il comportamento dinamico in un intorno della
posizione di equilibrio è
mẍ+rẋ + kx = F0 sin Ωt
(4.1)
Questa equazione di moto rappresenta anche il caso generale di un sistema
ad 1gdl linearizzato in un intorno della posizione di equilibrio
m∗ ϕ̈+r∗ ϕ̇ + k ∗ ϕ = F0∗ sin Ωt
(4.2)
in cui ϕ rappresenta lo scostamento in un intorno della posizione di equilibrio.
L’equazione differenziale del II ordine non omogenea 4.1, ha soluzione
generale
xg (t) = xo (t) + xp (t)
(4.3)
in cui xo (t) è la soluzione dell’equazione omogenea associata, ovvero
mẍ+rẋ + kx = 0
(4.4)
già discussa nel paragrafo 3.2.2, mentre xp (t) è un integrale particolare
dell’equazione differenziale 4.1, la cui espressione dipende dal termine noto.
Per quanto riguarda l’integrale xo (t) dell’equazione differenziale omogenea associata, si osserva che per indici di smorzamento h diversi da zero, il
moto descritto da xo (t) tende, per qualsiasi condizione iniziale imposta, ad
annullarsi dopo un certo intervallo di tempo, dipendente essenzialmente dal
coefficiente di smorzamento r∗ .
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
61
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
3
xo (t)
xp (t)
xg (t)
2
1
0
-1
t
0
0.2
0.4
0.6
0.8
1
1.2
1.4
-2
-3
Figura 4.2: Componenti dell’integrale generale, per h = 0.1, condizioni
iniziali nulle
Al termine di tale intervallo la risposta xg (t) cercata dipenderà esclusivamente dall’integrale particolare xp (t) in quanto xo (t) si è ormai annullato.
Questa condizione viene allora indicata come la risposta di regime, che è
quindi unicamente descritta dall’integrale particolare xp (t).
Per equazioni differenziali del tipo 4.1 l’integrale particolare assume la
forma
xp (t) = D sin(Ωt + φ) ,
(4.5)
l’integrale generale risulta allora
xg (t) = xo (t) + xp (t) = e−hω0 t (A cos ω1 t + B sin ω1 t) + D sin(Ωt + φ) (4.6)
in cui le costanti A e B dipendono dalle condizioni iniziali. La figura 4.2 mostra, per condizioni iniziali nulle, l’andamento dell’integrale dell’omogenea
associata xo (t), dell’integrale particolare xp (t) e dell’integrale generale. Si
osserva che dopo un certo intervallo di tempo, necessario affinchè xo (t) abbia
ampiezze trascurabili, l’integrale generale coincide con quello particolare.
Per la determinazione dell’ampiezza e dello sfasamento dell’integrale particolare, si tenga conto che, essendo esso una soluzione dell’equazione differenziale, la deve soddisfare. Sostituendo allora nella 4.1 xp (t) e le sue due
prime derivate
ẋp (t) = DΩ cos(Ωt + φ)
(4.7)
ẍp (t) = −DΩ2 sin(Ωt + φ)
si sostituite
−mDΩ2 sin(Ωt + φ) + rDΩ cos(Ωt + φ) + kD sin(Ωt + φ) = F0 sin Ωt (4.8)
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
62
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
mDΩ2 = mẍ
rDΩ = r ẋ
F0
φ
kD = kx
Ωt
Figura 4.3: Equilibrio dinamico per un sistema forzato
π
−mDΩ2 sin(Ωt+φ)+rDΩ sin( +Ωt+φ)+kD sin(Ωt+φ) = F0 sin Ωt (4.9)
2
La relazione 4.9 esprime l’equilibrio dinamico del sistema 4.1 come chiusura vettoriale delle forze che partecipano all’equilibrio. Il poligono di forze
risultante ruota con velcocità Ω (termine che compare in tutti gli addendi
della 4.9), mentre la configurazione del poligono dipende da D (ampiezza
di oscillazione dell’integrale particolare) e dallo sfasamento φ della risposta
xp (t) rispetto alla forzante F (t).
La figura 4.3 presenta l’equilibrio dinamico del sistema forzato. Si osserva che prese positive le rotazioni antiorarie, l’angolo φ risulta negativo,
quindi l’oscillazione xp (t) è ritardata dell’angolo φ rispetto alla forzante. La
forza elastica è parallela allo spostamento, quindi di modulo kD; la forza
dissipativa di ampiezza rDΩ è sempre ortogonale alla forza elastica, mentre
la forza d’inerzia di modulo mDΩ2 ha verso opposto rispetto alla risposta.
La chiusura vettoriale indicata, essendo note le direzioni relative dei
vettori, permette la determinazione dell’ampiezza D della risposta di regime
e dello sfasamento φ. Dalla chiusura vettoriale si determina
F02 = (kD − mDΩ2 )2 + (rDΩ)2 ,
(4.10)
da cui, con semplici passaggi, si ottiene
D=
F0
1
p
2
k
(1 − a )2 + (2ah)2
(4.11)
dove a = Ω/ω0 . L’ampiezza di oscillazione della risposta è, a parità di ampiezza F0 della forzante, funzione dell’indice di smorzamento h e del coefficiente a, rapporto fra la pulsazione della forzante e la pulsazione propria
ω0 del sistema.
Analogamente è possibile determinare lo sfasamento φ
φ = − arctan
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
2ah
.
(1 − a2 )
(4.12)
prof. Paolo Righettini - Università di Bergamo
63
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
|Cd |
100
10
h
1
0.1
0
0.5
1
1.5
2
2.5
3
Ω/ω0
Figura 4.4: Coefficiente di amplificazione dinamica Cd , per h
0.01, 0.05, 0.1, 0.25, 0.5
=
Dalla relazione 4.11 si osserva che l’ampiezza di oscillazione della risposta
xp (t) cercata (ovvero la deformata massima della parte elastica), può essere
messa in relazione con la deformata della parte elastica dovuta ad un carico
costante di intensità F0 . In questa circostanza infatti risulta δst = F0 /k.
Il rapporto fra l’ampiezza D della deformata dovuta alla forzante F0 sin Ωt
e la deformata δst in condizioni statiche, prende il nome di coefficiente di
amplificazione dinamica.
Cd =
D
1
=p
2
F0 /k
(1 − a )2 + (2ah)2
(4.13)
La figura 4.4 riporta l’andamento del coefficiente di amplificazione dinamica Cd al variare di a = Ω/ω0 e dell’indice di smorzamento h. Analizzando
la 4.13 si possono trarre le seguenti considerazioni:
• Per valori di a << 1, Cd tende all’unità indipendentemente dal valore
di h, ad indicare il fatto che l’ampiezza di oscillazione D della risposta
di regime è paragonabile alla deformata statica δst . Questa zona di
funzionamento è allora detta di comportamento quasi statico ed il
confronto fra queste due situazioni di carico è riportato in figura 4.5.
• Per valori di a ≈ 1, Cd assume valori maggiori dell’unità, in funzione
del valore di h. L’aumento del coefficiente Cd indica che l’ampiezza
di oscillazione D della risposta di regime è maggiore della deformata
statica δst , ed è tanto maggiore quanto più h è basso e tanto più a è
prossimo all’unità. Si osservi che a = 1 indica che il periodo T = 2π/Ω
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
64
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
Figura 4.5: Confronto fra la condizione di carico statica e dinamica per
a << 1
Figura 4.6: Confronto fra la condizione di carico statica e dinamica per
a ≈ 1 e h = 0.1
della forzante coincide con il periodo T0 = 2π/ω0 , caratteristico del
sistema non smorzato. Questa condizione di funzionamento è indicata
come di risonanza, ed è una situazione operativa che porta a deformazioni, e quindi a forze scaricate a terra, che possono essere molto
più grandi di quelle dovute a forze della stessa intensità ma applicate
in condizioni statiche. Il confronto fra le condizioni di carico statico e
dinamico di risonanza sono riportate in figura 4.6 per h = 0.1. In tali
condizioni il valore massimo di Cd è circa 5, quindi nelle condizioni
di regime si ottengono ampiezze di oscillazione 5 volte la deformata
statica δst . Si ricorda che un indice di smorzamento h = 0.1 è stato indicato come elevato, infatti porta ad oscillazioni libere la cui ampiezza
si dimezza (vedi equazione 3.47) per ogni periodo di oscillazione.
In dettaglio, l’espressione 4.13 presenta un massimo per
p
aCd ,max = 1 − 2 h2
(4.14)
a cui corrisponde un valore massimo
Cd,max =
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
1
1
1
√
.
'
2
2h 1−h
2h
(4.15)
prof. Paolo Righettini - Università di Bergamo
65
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
φ
0
Ω/ω0
-20
h
-40
-60
-80
-100
-120
-140
-160
-180
0
0.5
1
1.5
2
2.5
3
Figura 4.7: Sfasamento φ, per h = 0.01, 0.05, 0.1, 0.25, 0.5
Il massimo si ha perciò in prossimità di a = 1, e si presenta in anticipo
rispetto a questo valore all’aumentare di h. La posizione del massimo
è rappresentata con linea tratteggiata nella figura 4.4. Si osservi che
per h = 0.5 il valore massimo di Cd è circa 1, ad indicare che l’effetto dell’amplificazione delle oscillazioni in condizioni di risonanza è
notevolmente ridotto per indici di smorzamento h > 0.5.
• Per valori di a >> 1, Cd tende a zero indipendentemente dal valore di
h, ad indicare il fatto che l’ampiezza di oscillazione D della risposta
di regime tende ad annullarsi. Questa zona di funzionamento è detta
di comportamento sismografico.
Lo sfasamento φ della risposta è riportato in figura 4.7 in funzione di
a e dell’indice di smorzamento h. Esso diminuisce all’aumentare a, risulta
φ = −90◦ per a = 1 indipendentemente da h, e tende al valore di −180◦
per a >> 1.
L’andamento dello sfasamento φ mette in rilievo che la forma del poligono di forze 4.3 cambia in funzione di a. La figura 4.8 mostra la condizione di
equilibrio per le tre condizioni di funzionamento analizzate. Si può osservare
che:
• a << 1
La forzante F0 è equilibrata prevalentemente dalla forza elastica. Infatti φ ≈ 0 e la risposta xp (t) è poco sfasata rispetto alla forzante;
• a≈1
La forzante F0 è equilibrata dalla forza dissipativa. In questo caso
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
66
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
mẍ
r ẋ
mẍ
r ẋ
F0
F0
kx
kx
r ẋ
mẍ
kx
F0
Figura 4.8: Equilibrio dinamico per un sistema forzato. Da sinistra a destra
a < 1, a = 1, a > 1, h = 0.4
φ ≈ −90◦ , la derivata prima ẋp (t) della risposta è allora poco sfasata
rispetto alla forzante;
• a >> 1
La forzante F0 è equilibrata dalla forza d’inerzia. In questo caso φ ≈
−180◦ , la derivata seconda ẍp (t) della risposta è poco sfasata rispetto
alla forzante.
Le tre condizioni di equilibrio presentate in 4.8 sono determinate per i valori
di a riportati nelle figura 4.9.
|Cd |
1.4
a
c
b
1.2
1
0.8
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Ω/ω0
Figura 4.9: Valori di a per i quali si sono valutati gli equilibri dinamici di
figura 4.8, per h = 0.4
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
67
Figura 4.10: Dispositivi generatori di forzanti periodiche
4.2
Forze d’inerzia rotanti ed alternate
In ambito industriale e civile esistono parecchi esempi di dispositivi in grado
di generare forzanti periodicamente variabili come quelli fino ad ora analizzate. Fra questi, quelli più diffusi sono le macchine rotanti con rotori sbilanciati, ovvero con massa non uniformemente distribuita rispetto all’asse
di rotazione, ed i motori a combustione interna (figura 4.10).
Considerando ad esempio la macchina rotante sbilanciata di figura 4.11,
appoggiata su di una trave uniforme cedevole, di massa trascurabile rispetto
alla macchina rotante. Lo studio dinamico nella direzione verticale è riconducibile al modello ad un grado di libertà indicato in figura; Ω è la velocità
di rotazione dell’asse della macchina, k = 48EI/l3 è la rigidezza dovuta alla
cedevolezza della trave, M1 è la massa del telaio della macchina rotante, m
è la massa non bilanciata del rotore, e è l’eccentricità della massa non bilanciata m rispetto all’asse di rotazione ed r il coefficiente di smorzamento.
Indicando con x lo spostamento verticale del telaio, corrispondente al movimento verticale del centro della trave, e con y = x + e sin Ωt lo spostamento
verticale della massa m, l’equazione di moto in un intorno della posizione
di equilibrio risulta
(m + M1 )ẍ+rẋ + kx = M ẍ+rẋ + kx = meΩ2 sin Ωt
(4.16)
in cui M = M1 + m è la massa totale della macchina rotante.
L’equazione di moto 4.16 è analoga alla 4.1, e mette quindi in evidenza
che lo sbilanciamento del rotore genera una forzante sinusoidale di ampiezza
F0 = meΩ2 , ovvero l’effetto di una forza d’inerzia rotante come quella ora
analizzata è riconducibile a quello dovuto ad una forzante esterna applicata
alla macchina rotante.
Lo spostamento verticale x della macchina rotante nelle condizioni di
regime, è allora determinabile con le relazioni già viste, risulta x(t) =
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
68
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
Figura 4.11: Macchina rotante sbilanciata su trave di massa trascurabile
D sin(Ωt + φ) con
D=
F0
1
meΩ2
1
p
p
=
k
k
(1 − a2 )2 + (2ah)2
(1 − a2 )2 + (2ah)2
(4.17)
da cui moltiplicando numeratore e denominatore per M si ottiene
me 2
1
a p
2
M
(1 − a )2 + (2ah)2
(4.18)
a2
DM
=p
.
me
(1 − a2 )2 + (2ah)2
(4.19)
D=
e
Lo sfasamento della risposta rispetto alla forzante conserva invece l’espressione già trovata
2ah
φ = − arctan
.
(4.20)
(1 − a2 )
L’ampiezza dell’oscillazione D della macchina rotante rapportata a me/M
è indicata in figura 4.12; risulta nulla per a = 0, cresce, mantenendosi limitata grazie lo smorzamento, fino al raggiungimento della zona di risonanza,per
poi decrescere avvicinandosi asintoticamente al valore unitario.
Per a >> 1 il movimento verticale del telaio della macchina rotante è
sfasato di −π rispetto al movimento verticale della massa sbilanciata, ed ha
un’ampiezza D tale per cui il baricentro della macchina rotante, dovuto al
contributo della massa M1 e m, ha una posizione costante.
4.3
Eccitazione per spostamento del vincolo
impresso
Nel paragrafo 4.2 si è messo in evidenza come in ambiti applicativi esistano dispositivi in grado di generare forzanti con andamento periodico, che
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
69
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
M D/me
100
10
h
1
0.1
0.01
0
0.5
1
Figura 4.12:
MD
me ,
1.5
2
2.5
3
Ω/ω0
per h = 0.01, 0.05, 0.1, 0.25, 0.5
Figura 4.13: Eccitazione per spostamento del vincolo imposto
possono porre in vibrazione il sistema a cui sono applicate. La vibrazione
generata può essere tale per cui si pone in oscillazione anche il vincolo di
un altro sistema vibrante posto in prossimità, come illustrato nella figura
4.13. Questa situazione viene indicata come eccitazione per spostamento
del vincolo imposto. Si tratta allora di determinare il movimento verticale
della massa m in funzione delle caratteristiche dello spostamento impresso
al vincolo. Lo spostamento y del vincolo considerato è di tipo sinusoidale,
caratterizzato dall’ampiezza Y0 e della pulsazione Ω, quindi y(t) = Y0 sin Ωt.
Dall’equilibrio dinamico alla traslazione verticale si ottiene
mẍ + r(ẋ − ẏ) + k(x − y) = 0
(4.21)
da cui si ottiene l’equazione di moto
mẍ+rẋ + kx = rY0 Ω cos Ωt + kY0 sin Ωt = F (t)
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
(4.22)
prof. Paolo Righettini - Università di Bergamo
70
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
Figura 4.14: Forza applicata per lo spostamento del vincolo impresso
Questa equazione rivela che lo spostamento del vincolo imposto è equivalente ad una forzante F (t) = rY0 Ω cos Ωt + kY0 sin Ωt funzione dello spostamento impresso al vincolo (y, ẏ) e di k, r. La forzante F (t) risulta la
somma di due funzioni sinusoidali sfasate fra di loro di 90◦ (cos α = sin(α +
pi/2)). Analizzando la figura 4.14, la forzante può essere rappresentata dalla
relazione
p
F (t) = Y0 k 2 + (rΩ)2 sin(Ωt + ξ) = F0 sin(Ωt + ξ)
(4.23)
in cui
rΩ
→ tan ξ = 2ah .
k
L’equazione di moto 4.22 diventa allora
p
mẍ+rẋ + kx = Y0 k 2 + (rΩ)2 sin(Ωt + ξ)
tan ξ =
(4.24)
(4.25)
del tutto analoga a quella vista per i sistemi forzati, in cui ora la forzante ha
uno sfasamento ξ al tempo t = 0. Il moto imposto al vincolo si traduce allora
in una forzante di modulo F0 dipendente dall’ampiezza dello spostamento
impresso e da k, r e di pulsazione Ω coincidente con quella del movimento
del vincolo.
La risposta di regime è allora facilmente determinabile con le relazioni
già viste, risulta
x(t) = D sin(Ωt + φ + ξ) ,
(4.26)
analoga alla 4.5 a cui si è aggiunto lo sfasamento iniziale ξ della forzante.
L’ampiezza di oscillazione D risulta
p
Y0 k 2 + (rΩ)2
F0
1
1
p
p
D=
=
2
2
2
2
k
k
(1 − a ) + (2ah)
(1 − a )2 + (2ah)2
(4.27)
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
71
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
TR
100
10
h
1
0.1
0.01
0
1
2
3
4
5
Ω/ω0
Figura 4.15: Trasmissibilità, per h = 0.01, 0.05, 0.1, 0.25, 0.5
e quindi
p
D = Y0 p
1 + (2ah)2
(1 − a2 )2 + (2ah)2
= Y0 TR .
(4.28)
Questa equazione mette in relazione l’ampiezza Y0 dello spostamento impresso al vincolo con l’ampiezza D dell’oscillazione della massa, il rapporto
D/Y0 fra le due ampiezze, è detto trasmittibilità e viene indicata con TR .
La figura 4.15 mostra l’andamento della trasmissibilità in funzione del rapporto a = Ω/ω0 e dell’indice di smorzamento h. La trasmissibilità risulta
unitaria per a = 0, si amplifica nella zona di risonanza, per poi decrescere e
tendere asintoticamente
a 0 per a → ∞. La trasmissibilità
risulta unitaria
√
√
per a = 2, risulta sempre minore di 1 per a > 2, indipendentemente
dall’indice di smorzamento h.
Lo sfasamento della risposta x(t) rispetto allo spostamento del vincolo
imposto risulta φ̃ = φ + ξ, ed è tale per cui
tan(φ̃) = tan(φ + ξ) =
tan φ − tan ξ
,
1 + tan φ tan ξ
(4.29)
da cui ricordando che tan φ = −2ah/(1 − a2 ) si ottiene
tan(φ̃) = tan(φ + ξ) = −
2a3 h
1 − a2 + (2ah)2
(4.30)
un cui il segno − indica che la risposta è in ritardo rispetto allo spostamento
imposto al vincolo. La figura 4.16 mostra l’andamento dello sfasamento della
risposta in funzione della pulsazione dello spostamento del vincolo imposto
e dell’indice di smorzamento.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
72
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
φ̃
0
Ω/ω0
-20
h
-40
-60
-80
-100
-120
-140
-160
-180
0
1
2
3
4
5
Figura 4.16: Fase della risposta per spostamento del vincolo imposto, per
h = 0.01, 0.05, 0.1, 0.25, 0.5
4.4
Forze trasmesse
Nell’analisi della risposta di regime di un sistema forzato (figure 4.1) risulta
di interesse la determinazione della forza trasmessa verso il vincolo fisso
(terra), forza dovuta alla deformazione della rigidezza k e dallo smorzatore
r.
Figura 4.17: Forza trasmessa a terra
La forza Ft trasmessa a terra dipenderà allora dal moto di regime della
massa m, descritta dall’equazione 4.5, risultarà quindi
Ft (t) = kD sin(Ωt + φ) + rΩD cos(Ωt + φ) ,
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
(4.31)
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
73
in cui l’ampiezza di oscillazione D è determinabile dalla relazione 4.11.
La forza trasmessa a terra dipende dalla somma di due funzione trigonometriche fra di loro ortogonali, e può essere anche espressa nella forma
Ft (t) = kD sin(Ωt + φ) + rΩD sin(Ωt + φ + π/2) ,
(4.32)
per cui risulta la somma delle componenti lungo l’asse delle ordinate della
forza elastica, di modulo kD e fase Ωt + φ, e della forza dissipativa, di
modulo rΩD e fase Ωt + φ + π/2, come rappresentato in figura 4.17. La
stessa figura mostra che la forza trasmessa
è la proiezione lungo l’asse delle
√
ordinate della forza Ft di modulo D k 2 + Ω2 r2 e fase Ωt + φ + ξ, in cui ξ
è tale per cui tan ξ = rΩ/k = 2ah.
Ricordando la 4.11 il modulo della forza trasmessa a terra è allora,
Ft = D
p
k 2 + Ω2 r2 =
p
F0
1
p
k 2 + Ω2 r 2
k
(1 − a2 )2 + (2ah)2
(4.33)
p
1 + (2ah)2
Ft = F0 p
.
(1 − a2 )2 + (2ah)2
(4.34)
Quest’ultima relazione mostra che il modulo della forza trasmessa a terra
dipende dal modulo F0 della forzante e dalla trasmissibilità già introdotta
nel paragrafo 4.3. Il rapporto Ft /F0 fra il modulo della forza trasmessa
ed il modulo della forzante è allora la trasmissibilità, per cui è possibile
trasmettere a terra una forza minore della forzante solo se la trasmissibilità
è < 1. L’andamento della trasmissibilità è riportato in figura 4.15, per cui
si trasmette verso terra una forza minore della forzante di pulsazione Ω solo
se la pulsazione propria ω0 del sistema è tale per cui
a=
√
Ω
> 2.
ω0
(4.35)
La figura 4.18 mostra con linea tratteggiata la forza trasmessa a terra per
le tre zone di funzionamento: statico, di risonanza e sismografico. Il modulo
della forza trasmessa diminuisce in modo marcato per valori di a > 1, in
accordo all’andamento della trasmissibilità rappresentato nella figura 4.15.
Da quest’analisi risulta allora che il problema di limitare le forze scaricate a terra da un sistema forzato coincide con il problema di limitare le
oscillazioni di un sistema forzato per spostamento del vincolo imposto.
4.5
Isolamento dalle vibrazioni
Nei paragrafi 4.3 e 4.4 è stato messo in evidenza come i problemi della
riduzione delle vibrazioni dovute al movimento del vincolo e della riduzione
delle forze trasmesse verso terra da un sistema forzato, si riconducono dal
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
74
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
mẍ
mẍ
r ẋ
r ẋ
F0
F0
kx
kx
mẍ
r ẋ
kx
F0
Figura 4.18: Forza trasmessa a terra (tratteggiata). Da sinistra a destra
a < 1, a = 1, a > 1, h = 0.4
punto di vista analitico alla limitazione della trasmissibilità TR al di sotto
dell’unità,
√ imponendo quindi delle condizioni operative tali per cui a =
Ω/ω0 > 2.
Dal punto di vista applicativo questo comporta allora l’introduzione di
opportuni dispositivi meccanici, detti isolatori, il cui compito, per una determinata pulsazione Ω della forzante o dello spostamento del vincolo, è
quello di imporre le condizioni di funzionamento in modo che la trasmissibilità TR sia opportunamente limitata. Gli isolatori a cui si fa riferimento sono
quelli passivi, fisicamente sono delle molle (figura 4.21) lineari di adeguata
escursione, la cui costante elastica sarà opportunamente scelta in funzione
della frequenza del disturbo (sia esso in forza che in posizione) e della massa del sistema da isolare. Tale approccio risulta valido per limitare sia gli
effetti dovuti all’oscillazione del vincolo, sia l’entità della forza trasmessa a
terra da un sistema forzato.
Nei paragrafi precedentemente indicati è stato sottolineato che è possibi√
le ottenere un efficace isolamento qualora il rapporto a = Ω/ω0 >> 2. In
tali condizioni operative è possibile considerare un’espressione semplificata
della trasmissibilità, rappresentata dalla relazione
TR =
a2
1
1
= 2 2
−1
Ω /ω0 − 1
(4.36)
che lega la frequenza f della forzante (Ω = 2πf ) ed il valore della trasmissibilità desiderato alla pulsazione propria del sistema (ω0 ). Ad esempio, per
un sistema forzato, si potrebbe richiedere che la forza trasmessa a terra si
al massimo il 2% del modulo della forzante; in tal caso TR = 0.02.
La pulsazione propria del sistema dipende (vedi figura 4.19) dalla massa
m e dalla rigidezza k che, in questo caso, è quella dell’isolatore da inserire.
Nel settore degli isolatori la pulsazione propria viene espressa con una relazione diversa, in cui compare la deformata δst dell’isolatore (quindi della
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
75
Figura 4.19: Introduzione di un isolatore per limitare le forze trasmesse a
terra
rigidezza k) dovuta all’applicazione del peso proprio della massa m. Risulta
kδst = mg per cui
p
ω0 = g/δst .
(4.37)
Il parametro δst viene quindi utilizzato per indicare un opportuno accoppiamento fra rigidezza dell’isolatore e la massa del dispositivo da isolare.
Rielaborando la relazione 4.36 è possibile esprimere la frequenza f della forzante in funzione della deformata statica δst dell’isolatore e della
trasmissibilità richiesta, risulta
f2 =
TR + 1 g
1
.
TR (2π)2 δst
(4.38)
La figura 4.20 riporta il legame fra δst e f per alcuni valori della trasmissibilità. Tutti i punti al di sopra di una retta fissata da una determinato
valore della trasmissibilà, individuano un valore di frequenza e di deformata statica che portano a trasmissibilità inferiori a quella che fissa la retta
stessa.
4.6
Esempi
Esercizio 1:
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
76
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
f [ Hz]
100
TR = 0.8
TR = 0.5
TR = 0.2
TR = 0.1
TR = 0.02
10
1
1
10
100
1000
δst [ mm]
Figura 4.20: Frequenza della forzante in funzione della trasmissibilità
richiesta e del δst
Figura 4.21: Esempi di isolatori
La macchina operatrice rappresentata in figura pesa complessivamente 90 kN, esegue della operazioni di tranciatura di lamiera alla cadenza di 400 battute al minuto. Sullo stesso piano dell’officina è posizionato un impianto automatico per
l’assemblaggio delle lamiere prodotte, il cui funzionamento risente delle vibrazioni
indotte dalla pressa precedentemente citata. Considerando solo il moto verticale
della pressa, si richiede di determinare le caratteristiche di quattro isolatori per
la pressa che riducano le forze trasmesse a terra, responsabili delle vibrazioni del
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
77
piano dell’officina, siano ridotte del 70%.
Si tratta di scegliere degli isolatori in modo tale che la trasmissibilità TR sia pari
a 0.3. Facendo riferimento alla relazione semplificata della trasmissibilità
TR =
e ricordando che ω0 =
p
1
a2 − 1
g/δst si ottiene la relazione (vedi equazione 4.38)
δst =
TR + 1 g
1
TR (2π)2 f 2
che lega la frequenza della forzante alla deformata statica richiesta dagli isolatori.
Nel caso in studio risulta f = 400/60 = 6.67 Hz, trasmissibilità richiesta TR = 0.3,
per cui la deformata statica richiesta dagli isolatori per azione del peso proprio
della pressa è
δst = 24 mm .
Gli n isolatori da introdurre, in numero minimo di 4, devono essere tali per cui
ognuno di essi abbia un carico nominale di 90 kN/n. La rigidezza complessiva degli
isolatori risulta k∗ = 90 kN/δst = 3715 kN/m.
Utilizzando questi isolatori la pulsazione propria del sistema risulta
p
ω0 = g/δst = 20.12 rad/s = 3.2 Hz ,
mentre il rapporto fra l’ampiezza D di oscillazione della pressa nelle condizioni
di regime, ed il modulo F0 della forza di lavorazione per la frequenza operativa
indicata, risulta
1
1
D
= ∗p
= 8.27 · 10−8 m/N .
F0
k
(1 − a2 )2 + (2ah)2
Esercizio 2:
Un delicato sistema di misura viene installato nei laboratori di una sede produttiva.
Le macchine operatrici qui presenti generano delle vibrazioni del piano d’officina di
ampiezza massima 1 mm e con frequenze nell’intervallo 20−25 Hz. Considerando il
solo moto verticale dello strumento si richiede di determinare gli isolatori necessari
allo strumento in modo che le sue oscillazioni non superino i 50 µm. Il peso dello
strumento è 1200 N.
La trasmissibilità richiesta è TR = 50/1000 = 0.05 che, se verificata per la frequenza più bassa dell’intervallo indicato, è verificata anche per le frequenze maggiori.
Considerando allora la frequenza f = 20 Hz, la deformata statica richiesta agli
isolatori è
TR + 1 g
1
δst =
= 13 mm .
TR (2π)2 f 2
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
78
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
A tele deformata statica corrisponde una rigidezza complessiva p
k∗ = 1200/0.013 =
92 kN/m, ed una frequenza propria dello strumento pari a ω0 = g/δst = 27.4 rad/s =
4.26 Hz.
Esercizio 3:
Un’autovettura viaggia con velocità v = 72 km/h su di una strada sconnessa il cui
profilo è assimilabile a quello di una sinusoide di ampiezza y0 = 30 mm e lunghezza
d’onda λ = 5 m. La massa del veicolo sia m = 1200 kg, la rigidezza equivalente
delle sospensioni k = 90 kN/m mentre il coefficiente di smorzamento equivalente
sia r = 2000 Ns/m. Considerando il veicolo e le sospensioni come un sistema
vibrante ad un grado di libertà nella direzione verticale determinare:
• l’equazione di moto;
• l’ampiezza di oscillazione della cassa del veicolo nelle condizioni di regime;
• la velocità di avanzamento del veicolo per la quale si raggiungono le condizioni di risonanza
• per quale velocità l’ampiezza di oscillazione di regime è minore di 20 mm
L’avanzamento del veicolo sul profilo stradale sinusoidale è riconducibile al problema dei sistemi forzati per spostamento del vincolo imposto. In questo caso lo
spostamento del vincolo imposto è y(t) = Y0 sin Ωt in cui l’ampiezza è pari all’ampiezza y0 del profilo stradale, mentre la pulsazione dello spostamento del vincolo
dipende dalla lunghezza d’onda del profilo stradale e dalla velocità di avanzamento,
risulta Ω = 2πv/λ = 25.13 rad/s.
L’equazione di moto risulta allora (equazione 4.25)
q
mẍ+rẋ + kx = Y0 k2 + (rΩ)2 sin(Ωt + ξ)
; risulta ω0 = 8.66 rad/s e h = 0.096. In tali
in cui ξ è tale per cui tan ξ = rΩ
k
condizioni la risposta di regime della cassa del veicolo è
x(t) = D sin(Ωt + φ + ξ) ,
in cui l’ampiezza di oscillazione D dipende (equazioni 4.27, 4.28) dall’ampiezza di
oscillazione del vincolo e della trasmissibilità TR
p
p
Y0 k2 + (rΩ)2
1 + (2ah)2
1
p
D=
= Y0 p
.
2
2
2
k
(1 − a ) + (2ah)
(1 − a2 )2 + (2ah)2
Per la velocità di regime indicata risulta risulta
TR v=72 km/h = 0.154
per cui l’ampiezza di oscillazione nelle condizioni di regime indicate è
D = Y0 0.154 = 0.0046 m .
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
79
Le condizioni di risonanza vengono raggiunte quando la pulsazione della forzante
coincide con la pulsazione propria del sistema, per cui
vris = λω0 /2π = 6.9 m/s = 24.8 km/h .
Affinchè si abbiano delle oscillazioni della cassa minori di 20 mm è necessario che
che la trasmissibilità assuma il valore
TR rich =
20
= 0.6667 .
30
Il valore della velocità per cui si raggiunge questo valore della trasmissibilità,
per l’indice di smorzamento h del sistema, può essere ricavato risolvendo in a
l’espressione
p
1 + (2ah)2
p
= TR rich = 0.6667 ,
(1 − a2 )2 + (2ah)2
si ottiene a = 1.59, per cui Ωlim = 1.59ω0 . La velocità oltre la quale le ampiezze
di oscillazione limitate rispetto al valore indicato è perciò
vlim = Ωlim λ/2π = 11 m/s = 39.5 km/h .
Un’approssimazione di tale risultato può essere ottenuta considerando per la trasmissibilità l’espressione semplificata
TR =
1
,
a2 − 1
valida per a > 1. Per il valore di trasmissibilità desiderato risulta
p
a = 1 + 1/TR rich = 1.58
che poco si discosta dal valore precedentemente calcolato.
Esercizio 4:
La rettifica rappresentata in figura appoggia su degli isolatori che complessivamente costituiscono una rigidezza e smorzamento equivalente k = 1000 kN/m e
r = 10000 Ns/m, mentre il peso complessiva della macchina è M = 5000 N. Il
pavimento su cui appoggia la macchina ha degli spostamenti sinusoidali. Considerando solo il movimento verticale della rettifica, supposta rigida, determinare il
valore massimo dell’ampiezza di oscillazione del pavimento in funzione della frequenza dell’oscillazione, affinché lo spostamento massimo della testa della rettifica
sia minore di 1 µm.
L’esercizio presenta un sistema forzato per spostamento del vincolo imposto. In
questa classe di problemi l’ampiezza di oscillazione D della testa dipende dall’ampiezza y0 di oscillazione del pavimento e dalla trasmissibilità
p
1 + (2ah)2
D = y0 p
.
(1 − a2 )2 + (2ah)2
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
80
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
y0 [ m]
1e-005
1e-006
1e-007
1e-008
0
0.5
1
1.5
2
2.5
3
Ω/ω0
Figura 4.22: Massima ampiezza di oscillazione del vincolo ammessa in
funzione della frequenza
La pulsazione propria del risulta ω0 = 1414 rad/s e h = 0.0071. Affincheé risulti
D < 1 µm dovrà risultare
,
p
1 + (2ah)2
p
y0 < 1 · 10−6
(1 − a2 )2 + (2ah)2
che rappresenta il legame fra ampiezza oscillazione imposta al vincolo e la sua
frequenza. La figura 4.22 rappresenta le condizioni limite per la disequazione
indicata.
Esercizio 5:
Il sistema indicato in figura ruota attorno al punto o ed è forzato per spostamento
del vincolo impresso. Lo spostamento impresso al vincolo ha un’ampiezza y0 =
0.02 m ed una pulsazione Ω = 100 rad/s. Si richiede di:
• determinare l’equazione di moto;
• determinare la risposta di regime;
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
81
• verificare nelle condizioni di regime il tiro della fune che sostiene la massa
m.
Siano J = 0.1 kgm2 , m = 2 kg, k = 1000 N/m, R = 0.3 m, r = 0.1 m.
Lo spostamento applicato al vincolo e la rotazione della puleggia, descritta dalla
coordinata libera α, si traduco in una forza applicata all’estremo A della molla di
modulo
Fa = k(y0 sin Ωt − Rα)
e con il verso indicato in figura. La forza Fa è la somma di sue forze, una proporzionale ad α ed una dipendente dal tempo. Quest’ultima risulta nulla all’istante
t = 0 e non partecipa alla definizione della posizione di equilibrio. La posizione di
equilibrio dipende allora dalla forza peso mg e della rigidezza k della molla; nelle
condizioni di equilibrio statico la deformata statica δst della molla sarà tale per
cui
mgr
.
kδst R = mgr → δst =
kR
Per la determinazione dell’equazione di moto in un intorno della posizione di equilibrio si possono utilizzare uno dei metodi visti nel capitolo precedente. Si assume
come coordinata libera la rotazione α della puleggia a partire dalla posizione di
equilibrio statico. Utilizzando ad esempio il bilancio di potenze linearizzato in un
intorno della posizione di equilibrio, si dovranno essere determinati i rapporti di
trasmissione delle forze esterne applicate, rappresentate in figura. In questo caso
i rapporti di trasmissione sono costanti, e per i punti A, B e C risultano
τA = R,
La massa equivalente
τB = 1,
τC = r .
m∗
risulta
X
2
= J + mr2 .
m =
mi τi20 = J + mτC
∗
L’unica forza esterna che concorre alla definizione della rigidezza equivalente è
parte della forza applicata in A dipendente dalla coordinata libera α (−kαR).
Infatti il precarico della molla nelle condizioni di equilibrio e la forza peso non
compaiono in quanto sono applicate in punti che hanno rapporto di trasmissione
costante rispetto alla coordinata libera, mentre la forza applicata in A che rappresenta l’effetto dovuto allo spostamento del vincolo (F a1 = ky0 sin Ωt) è nulla nelle
condizioni di equilibrio statico e non dipende dalla coordinata libera. La rigidezza
equivalente risulta allora
!
Ã
¯
X dF i ¯
¯ ·τ i + F i · γ
− (−kR)R = kR2 .
k∗ = −
i0
0
d= ¯===00
L’effetto dello spostamento del vincolo imposto viene introdotto tenendo conto
del lavoro virtuale prodotto per un incremento della coordinata libera rapportato
all’incremento della coordinata libera stessa che, come visto, è rappresentato dal
prodotto scalare fra la forza ed il rapporto di trasmissione del punto di applicazione
F a1 · τA = ky0 sin(Ωt)R .
L’equazione di moto risulta allora
(J + mr2 )α̈ + (kR2 )α = kRy0 sin(Ωt) .
A questo risultato si poteva giungere applicando l’equazione di Lagrange. In questo esercizio, come già osservato, le forze costanti non rientrano nella scrittura
delle equazioni di moto, per cui utilizzando la coordinata libera α a partire dalla
condizione di equilibrio statico, non verrà considerato il potenziale della forza peso,
si considerarà solamente il potenziale associato alla molla a partire dalla posizione
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
82
CAPITOLO 4. SISTEMI AD UN GRADO DI LIBERTÀ FORZATO
di equilibrio statico. Ricordando i legami cinematici illustrati precedentemente,
l’energia cinetica risulta
1
1
T = J α̇2 + m(rα̇)2 ,
2
2
mentre l’energia potenziale è
V =
1
k(Rα)2 .
2
L’effetto della forza generata dallo spostamento del vincolo (F a1 = ky0 sin Ωt)
viene introdotto come componente lagrangiana lungo la coordinata libera, risulta
Qα = F a1 · τA = ky0 sin(Ωt)R .
Applicando l’equazione di Lagrange
µ
¶
∂L
d ∂L
−
= Qα
dt ∂ α̇
∂α
,
L=T −V
si ottiene l’equazione di moto precedentemente trovata.
La risposta di regime sarà allora del tipo
α(t) = D sin(Ωt + φ)
in cui D risulta
ky0 R
1
y0
1
p
=
.
k∗
R 1 − a2
(1 − a2 )2 + (2ah)2
p
In questo caso risulta ω0 =
k∗ /m∗ = 27.4 rad/s, a = Ω/ω0 = 3.65, per cui
l’ampiezza di oscillazione del disco nelle condizioni regime è
D=
D = 5.4 mm .
Per la verifica del tiro T della fune che sorregge la massa m, si devono considerare tutte le forze applicate alla massa. Dalla figura, l’equilibrio alla traslazione
verticale della massa otteniamo
T + rα̈m = mg
→
T = m(g − rα̈) ≥ 0 .
Il minimo valore del tiro della fune si verifica in corrispondenza del valore massimo
dell’accelerazione α̈max , che per la risposta di regime è α̈max = DΩ2 = 54 rad/s2 .
Il valore massimo dell’accelerazione della massa imposto dalla risposta di regime
è amax = α̈max r = 5.4 m/s2 < g, per cui Tmin = m(g − amax ) = 8.8 N, la fune
risulta sempre tesa.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
Capitolo 5
Funzioni di trasferimento
L’analisi dei sistemi vibranti condotta, ha riguardato sistemi lineari, la cui
dinamica è descritta da equazioni differenziali ordinarie a coefficienti costanti. La risposta libera e forzata di questi sistemi è stata determinata nel
dominio del tempo, ed in particolare la risposta libera è stata determinata in funzione di condizioni iniziali, mentre quella forzata in funzione della
pulsazione del segnale sinusoidale forzante.
Questo legame fra forzante (ingresso) e risposta (uscita) del sistema può
essere efficacemente rappresentata per mezzo dello schema a blocchi di figura
5.1, nel quale il blocco G rappresenta il sistema lineare, la cui dinamica è
descritta da un’equazione differenziale ordinaria a coefficienti costanti.
Figura 5.1: Rappresentazione a blocchi di una funzione di trasferimento
Il sistema lineare trasforma il segnale in ingresso nel segnale in uscita,
questa trasformazione può essere efficacemente rappresentata da una funzione complessa detta funzione di trasferimento. La funzione di trasferimento
ha gli stessi parametri dell’equazione differenziale descrivente il comportamento dinamico del sistema, ha cioè lo stesso contenuto informativo.
83
84
5.1
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
Determinazione e caratteristiche della funzione di trasferimento
La funzione di trasferimento, per condizioni iniziali nulle, può essere efficacemente ottenuta dalla trasformata di Laplace (vedi appendice B) dell’equazione di moto. Considerando ad esempio l’equazione di moto di un
sistema forzato
mẍ+rẋ + kx = F (t) ,
(5.1)
trasformando con Laplace si ottiene
ms2 X(s) + rsX(s) + kX(s) = F (s)
(5.2)
da cui la funzione di trasferimento G(s) nel dominio delle trasformate, calcolata come rapporto fra la trasformata del segnale in uscita X(s) e la
trasformata del segnale in ingresso F (s) risulta
G(s) =
X(s)
1
=
.
F (s)
ms2 + rs + k
(5.3)
La funzione di trasferimento ottenuta è caratterizzata dagli stessi parametri
(m, r e k) dell’equazione differenziale di partenza.
I sistemi con un ingresso ed una uscita, detti SISO, hanno funzioni di
trasferimento espresse nella forma razionale in s
G(s) =
N (s)
D(s)
(5.4)
in cui N (s) e D(s) sono dei polinomi nella variabile complessa s primi fra
loro.
Le radici del polinomio al numeratore N (s) sono detti zeri della funzione
di trasferimento, mentre le radici del polinomio al denominatore sono detti
poli della funzione di trasferimento. Se i coefficienti dell’equazione differenziale di partenza sono reali, anche gli zeri ed i poli sono reali oppure, se
complessi, compaiono in coppie complesse coniugate.
Per la funzione di trasferimento 5.3, il calcolo dei poli porta alla soluzione
del polinomio in s
ms2 + rs + k = 0
→
s2 + 2hω0 + ω02 = 0
(5.5)
le cui radici coincidono con quelle dell’equazione 3.30 in λ di pagina 46.
I poli risultano allora gli esponenti degli esponenziali che descrivono la risposta libera nel dominio del tempo, quindi la posizione dei poli nel piano
complesso è indicativa della risposta libera del sistema descritto dalla funzione di trasferimento. Allora un sistema stabile ha tutti i poli con parte
reale negativa.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
85
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
Per 0 < h < 1 il polinomio 5.5 ha poli complessi coniugati
p
p1,2 = −hω0 ± iω0 1 − h2 ,
(5.6)
la cui posizione è riportata nella figura 5.2. I poli hanno modulo ω0 , la loro
Figura 5.2: Posizione dei poli complessi coniugati per un sistema oscillante
posizione nel piano è tale per cui il coseno dell’angolo θ indicato è cos θ =
hω0 /ω0 = h e quindi coincide con l’indice di smorzamento. All’aumentare
di θ l’indice di smorzamento diminuisce, per θ = π/2 i poli sono immaginari
coniugati e giacciono sull’asse immaginario (h = 0). In questo caso la
risposta libera del sistema è oscillatoria non smorzata. Al diminuire di
θ l’indice di smorzamento cresce, per cui il sistema sarà in condizioni di
smorzamento critico per θ = 0. In tale condizione i poli sono coincidenti
e giacciono sull’asse reale e la risposta libera del sistema è esponenziale
decrescente senza oscillazioni. Per valori di indice di smorzamento maggiore,
i poli saranno reali e distinti, appartenenti all’asse reale.
Risulta conveniente in alcune circostanze assegnare alla funzione di trasferimento una forma che metta in evidenza gli zeri ed i poli, ovvero rappresentando i polinomi N (s) e D(s) raccolti in fattori
Q
Q
2
2
l (1 + 2hl s/α0l + s /α0l )
i (1 + τi s)
Q
(5.7)
G(s) = µ g Q
2
2
s
m (1 + Tm s)
k (1 + 2hk s/ω0 k + s /ω0 k )
nella quale le produttorie con indice i e m evidenziano gli zeri ed i poli reali,
mentre le produttorie con indice l e k evidenziano gli zeri ed i poli complessi
coniugati.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
86
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
5.2
Transitori
Figura 5.3: Risposta al gradino in forza di un sistema vibrante
La determinazione della risposta U (s) nel dominio delle frequenze, dovuta ad un ingresso Y (s), è di facile determinazione per un sistema con
funzione di trasferimento G(s). Infatti, per la definizione di funzione di
trasferimento, risulta
Y (s) = G(s)U (s) .
(5.8)
La risposta nel dominio del tempo viene determinata antitrasformando Y (s) secondo quanto riportato in appendice B. In generale la funzione
Y (s) = G(s)U (s) da antitrasformare è una funzione razionale. In tal caso
l’operazione di antitrasformazione può essere efficacemente eseguita scomponendo Y (s) nella somma di funzioni razionali di cui è nota l’antitrasformata, e quindi basandosi su trasformate notevoli già note. Per la proprietà di
linearità, l’antitrasformata cercata sarà la somma delle singole trasformate.
5.2.1
Risposta allo scalino di un sistema del secondo
ordine
Fra i sistemi con funzione di trasferimento del secondo ordine rientrano
quelli vibranti. Infatti il sistema forzato di figura 5.3 ha equazione di moto
mẍ+rẋ + kx = F (t) ,
(5.9)
e quindi funzione di trasferimento fra l’ingresso (forzante) F (t) e l’uscita x spostamento della massa, determinabile dalla trasformata di Laplace
dell’equazione differenziale. Si ottiene
da cui
G(s) =
ms2 X(s) + rsX(s) + kX(s) = F (s)
(5.10)
X(s)
1
1
1
=
=
2
2
F (s)
ms + rs + k
m s + 2hω0 + ω02
(5.11)
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
87
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
p
nella quale ω0 = k/m e h = r/2mω0 .
Le funzioni di trasferimento del secondo ordine hanno allora una forma
generale del tipo
1
G(s) = µ 2
.
(5.12)
s + 2hω0 + ω02
x(t)
F0 /k
1.8
h = 0.1
h = 0.2
h = 0.6
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
t
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Figura 5.4: Influenza dell’indice di smorzamento al variare dell’indice di
smorzamento h sulla risposta al gradino
Come già visto sistemi del secondo ordine di questo tipo possono presentare delle oscillazioni nella risposta libera se il parametro h, detto indice
di smorzamento, è minore dell’unità. Viene ora presentata la risposta al
gradino di un sistema del secondo ordine, nell’ipotesi di 0 < h < 1. In tali
condizioni la funzione di trasferimento ha poli complessi coniugati
p
p1,2 = −ω0 h ± iω0 1 − h2
(5.13)
di modulo ω0 .
Considerando un segnale di forza in ingresso a gradino di altezza F0 , con
trasformata di Laplace (vedi appendice B)
F (s) =
Fo
s
(5.14)
la risposta x ha trasformata di Laplace
X(s) = G(s)F (s) =
F0
1
1
F0
1
=
.
m s2 + 2hω0 + ω02 s
m s(s2 + 2hω0 + ω02 )
(5.15)
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
88
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
x(t)
F0 /k
1.6
0.5ω0
ω0
4ω0
1.4
1.2
1
0.8
0.6
0.4
0.2
t
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Figura 5.5: Influenza della pulsazione propria ω0 sulla risposta al gradino
Il valore di regime a cui tende la risposta nel domino del tempo può
essere facilmente determinata dalla X(s) applicando il teorema del valore
finale (vedi appendice B),
x(∞) = lim sX(s) .
s→0
(5.16)
In questo caso avendo posto in ingresso un segnale a gradino con trasformata
F0 /s si ottiene
x(∞) = lim sX(s) = lim s
s→0
s→0
F0
F0
G(s) = F0 G(0) =
.
s
k
(5.17)
La risposta x(t) nel dominio nel tempo, come presentato nell’esempio
che segue, è ottenibile antitrasformando X(s), per cui
·
¸
1
−1
−1 F0
x(t) = L [X(s)] = L
(5.18)
k s(s2 + 2hω0 + ω02 )
e quindi
¶¸
·
µ
F0
h
−ω0 ht
sin(ω1 t)
.
(5.19)
x(t) =
sca(t) + e
cos(ω1 t) + √
k
1 − h2
√
in cui ω1 = ω0 1 − h2 , mentre sca rappresenta la funzione gradino unitario.
Questa espressione mette in evidenza che la risposta si assesta, eventualmente compiendo delle oscillazioni, attorno al valore pari a F0 /k = µ/ω02 . Le
figure 5.4 e 5.5 riportano delle risposte x(t) al variare dei parametri della
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
89
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
funzione di trasferimento, la pulsazione propria ω0 e l’indice si smorzamento
h.
Si osserva come all’aumentare dell’indice di smorzamento si riducano le
oscillazioni necessarie affinchè la risposta si stabilizzi al valore di regime.
Inoltre all’aumentare di h si riducono le ampiezze di oscillazione attorno al
valore di regime, la prima delle quali è detta sovraelongazione. All’aumentare della pulsazione propria ω0 aumenta la frequenza di oscillazione attorno
al valore di regime e si riduce il tempo necessario affinchè la risposta raggiunga per la prima volta il valore di regime. Questo ad indicare che un
aumento del modulo dei poli complessi coniugati porta ad una riduzione del
tempo di risposta del sistema. In questo contesto si definisce come tempo
di salita Ts il tempo necessario alla risposta per passare dal 10% al 90% del
valore di regime.
5.2.2
Risposta al gradino di sistemi del primo ordine
Il sistema del primo ordine considerato in questo paragrafo è caratterizzato
dall’uscita y(t) e dall’ingresso u(t). La funzione di trasferimento che lega i
due segnali sia del tipo
G(s) =
Y (s)
1
=µ
.
U (s)
τs + 1
(5.20)
Essa ha un polo p = −1/τ reale negativo per τ > 0. La risposta nel dominio
delle frequenze ad un ingresso a gradino unitario, quindi con trasformata
U (s) = 1/s, risulta
Y (s) = G(s)U (s) = µ
1 1
.
τs + 1 s
(5.21)
La risposta y(t) nel dominio del tempo si assesterà attorno ad un valore
di regime determinabile con il teorema del valore finale
y(∞) = lim sY (s) = lim sµ
s→0
s→0
1 1
=µ.
τs + 1 s
(5.22)
L’andamento della risposta y(t) può essere ottenuta antitrasformando Y (s).
L’operazione è facilitata se si scompone la funzione razionale Y (s) nella somma di funzioni elementari di cui è nota l’antitrasformata (si veda l’appendice
B). Risulta
1 1
A
B
Y (s) = µ
= +
(5.23)
τs + 1 s
s
τs + 1
da cui, eliminando in ambo i membri il denominatore comune, si ottiene
µ = A(τ s + 1) + Bs .
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
(5.24)
prof. Paolo Righettini - Università di Bergamo
90
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
Uguagliando i coefficienti della stessa potenza in s dei polinomi al primo e al
secondo membro, si ottengono due equazioni che permettono di determinare
le costanti A e B.
½
½
Aτ + B = 0
A=µ
→
.
(5.25)
A=µ
B = −µτ
La funzione complessa Y (s) è allora esprimibile come la somma di due
funzioni razionali
µ
µτ
Y (s) = −
(5.26)
s
τs + 1
di cui è nota l’antitrasformata. Riferendosi alla tabella B.1 si ottiene
y(t) = µ − µτ
e−t/τ
= µ(1 − e−t/τ ) .
τ
(5.27)
La risposta nel dominio del tempo ha andamento esponenziale, tende asintoticamente al valore µ (come già sottolineato con il teorema del valore
finale).
y(t)
µ
1
τ
0.5τ
0.25τ
0.8
0.6
0.4
0.2
t
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Figura 5.6: Influenza del polo sulla risposta al gradino
La figura 5.6 rappresenta alcune risposte al variare della costante di
tempo τ del polo. Si osserva che all’aumentare del modulo del polo (al
diminuire della costante di tempo), l’uscita tende ad avvicinarsi al valore di
regime in tempi sempre più brevi.
5.2.3
Esempi
Esercizio 1:
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
91
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
Determinare la risposta al gradino di forza F0 u(t) applicata al sistema
presentato in figura, a partire da condizioni iniziali nulle.
Considerando la coordinata libera x indicata, l’equazione di moto del
sistema, ottenuta ad esempio con il metodo degli equilibri dinamici, è
mẍ+rẋ + kx = F0 u(t) .
Per la determinazione della risposta in forza, trasformiamo con Laplace l’equazione di moto, ottenendo la risposta X(s) nel dominio delle
trasformate. Ricordando che la trasformata del gradino unitario u(t)
è 1/s, si ottiene
ms2 X(s)+rsX(s)+kX(s) =
F0
s
→
X(s) =
F0
s(ms2 + rs + k)
che, raccogliendo la massa m al denominatore, può essere rielaborata
nella forma
F0
1
X(s) =
.
2
m s(s + 2ω0 hs + ω02 )
La risposta x(t) può essere ottenuta antitrasformando la relazione precedente. Tale operazione può essere facilitata scomponendo la funzione razionale fratta X(s) nella somma di funzioni di cui è nota l’antitrasformata. Si osserva che l’espressione X(s) ha un polo distinto
nell’origine e due poli complessi coniugati (supponendo h¡1). Dall’appendice B la funzione X(s) può allora essere ricondotta nella somma
di funzioni
X(s) =
F0
1
A
Bs + C
= + 2
2
2
m s(s + 2ω0 hs + ω0 )
s
s + 2ω0 hs + ω02
in cui le costanti A, B e C vanno determinate in modo che la somma
delle due funzioni introdotte ci riconduca allo stesso numeratore di
X(s). Eliminando il denominatore comune nelle due espressioni risulta
F0
= A(s2 + 2ω0 hs + ω02 ) + (Bs + C)s .
m
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
92
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
Uguagliando i coefficienti delle stesse potenze in s si ottiene un sistema
di tre equazioni che permette la determinazione delle tre incognite.
coefficiente di s2
A+B =0
A2ω0 h + C = 0 coefficiente di s
.
Aω 2 = F0
termine noto
0
m
Si ottiene
A=
e quindi
F0
,
k
B=−
F0
,
k
C=−
F0
2ω0 h
k
·
¸
s + 2ω0 h
F0 1
−
X(s) =
.
k s s2 + 2ω0 hs + ω02
La risposa nel domino nel tempo cercata è
· ¸
·
·
¸ ¸
s + 2ω0 h
F0
−1 1
−1
−1
L
−L
.
x(t) = L [X(s)] =
k
s
s2 + 2ω0 hs + ω02
√
Dalle tabelle di appendice B, e ricordando che ω0 1 − h2 = ω1 , risulta
·
µ
¶¸
F0
h
−ω0 ht
1−e
cos(ω1 t) + √
x(t) =
sin(ω1 t)
.
k
1 − h2
Questa risposta per h = 0.1, ω0 = 30 rad/s e F0 /k = 1, è mostrata
nella figura seguente.
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0
t
0
0.2 0.4 0.6 0.8
1
1.2 1.4
Si osserva che dopo un transitorio iniziale in cui compaiono delle oscillazioni, la posizione della massa si assesta attorno al valore F0 /k,
caratteristico della posizione statica.
5.3
Risposta di regime - analisi in frequenza
Nel capitolo 4 è stata presentata l’analisi di sistemi ad un grado di libertà
soggetti a forze variabili nel tempo con andamento sinusoidale, secondo il
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
93
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
Figura 5.7: Forzante sinusoidale applicata ad un sistema del secondo ordine
modello presentato in figura 5.7, per il quale m = 1 kg, r = 18.87 Ns/m
e k = 1000 N/m. L’andamento della posizione della massa è descritto
dall’equazione di moto
mẍ+rẋ + kx = F0 sin Ωt = F (t) .
(5.28)
La soluzione x(t) dell’equazione differenziale è risultata la somma di due
contributi, il primo dovuto alla risposta libera funzione delle condizioni iniziali, il secondo dovuto alla forzante applicata. Il contributo della risposta
libera tende ad annullarsi velocemente, per cui la riposta di regime è dovuta
solamente alla forzante applicata. La risposta di regime ha lo stesso andamento sinusoidale della forzante, quindi pulsazione Ω, ampiezza D dipendente dall’ampiezza e dalla pulsazione della forzante, ed è sfasata rispetto
alla forzante di un angolo φ funzione di Ω (vedi paragrafo 4.1 di pagina 60)
x(t) = D(F0 , Ω) sin(Ωt + φ(Ω)) .
(5.29)
L’ampiezza D dipende linearmente dall’ampiezza della forzante, mentre ha
dipendenza non lineare da Ω, come evidenziato dal coefficiente di amplificazione dinamica (vedi equazione 4.13 di pagina 63). La risposta di regime
può allora essere espressa nella forma
x(t) = F0 Ag (Ω) sin(Ωt + φ(Ω))
(5.30)
in cui Ag (Ω) rappresenta il termine non lineare che lega l’ampiezza della
forzante con quello della risposta.
Questo risultato può essere esteso a tutti i sistemi lineari nei quali un
ingresso sinusoidale (forzante) comporta un’uscita (spostamento della massa) sinusoidale con la stessa pulsazione della forzante ma sfasata rispetto ad
essa. Il rapporto fra l’ampiezza del segnale in uscita e quello in ingresso è
una funzione Ag (Ω) non lineare nella pulsazione Ω della forzante.
La risposta di regime ad un segnale sinusoidale è allora completamente
definita dalle funzioni in Ω Ag (Ω) e φ(Ω). L’andamento di queste funzioni
è stato determinato per alcuni sistemi nel capitolo 4 analizzando la risposta
in funzione del tempo.
Queste due funzioni possono essere determinate direttamente dalla funzione di trasferimento fra ingresso ed uscita. Considerando la funzione di
trasferimento razionale
N (s)
(5.31)
G(s) =
D(s)
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
94
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
è possibile dimostrare che la funzione Ag (Ω) precedentemente citata è il
modulo della funzione di trasferimento calcolata per s = iΩ, mentre la
funzione φ(Ω) è l’argomento della funzione di trasferimento calcolata per
s = iΩ
Ag (Ω) ≡ |G(iΩ)|
φ(Ω) ≡ arg G(iΩ) .
(5.32)
La risposta di regime dovuta ad una forzante sinusoidale è allora rappresentabile in termini di funzione di trasferimento dello schema a blocchi di
figura 5.7. L’ampiezza della risposta è D = F0 |G(iΩ)|, mentre lo sfasamento φ = arg G(iΩ). Dall’equazione differenziale 5.28 si ottiene la funzione di
trasferimento
1
X(s)
=
,
(5.33)
G(s) =
F (s)
ms2 + rs + k
quindi
D
¯
¯
¯
¯
1
¯
¯ = ...
= F0 |G(iΩ)| = F0 ¯
2
−mΩ + riΩ + k ¯
1
1
1
= F0 p
= F0 p
2
2
2
k
(k − mΩ ) + (rΩ)
(1 − a )2 + (2ah)2
(5.34)
come già ottenuto nell’equazione 4.11 di pagina 62. Lo sfasamento risulta
"
#
k − mΩ2 − riΩ
= ...
φ = arg G(iΩ) = arg p
(k − mΩ2 ) + (rΩ)2
(5.35)
rΩ
2ah
= − arctan
= − arctan
k − mΩ2
(1 − a2 )
come già ottenuto nell’equazione 4.12 di pagina 62.
La risposta dei sistemi lineari è quindi completamente definita dalla
funzione complessa ottenuta dalla funzione di trasferimento calcolata per
s = iΩ. Questa funzione viene quindi indicata come risposta in frequenza
del sistema, in quanto permette di determinare l’ampiezza e lo sfasamento
della risposta di regime in funzione della pulsazione (frequenza) del segnale
in ingresso.
L’andamento del modulo |G(iΩ)| e dell’argomento arg G(iΩ) della risposta in frequenza, viene rappresentato in diagrammi, detti di Bode del modulo
e della fase, ottenibili dal rispettivo studio di funzione. Il diagramma del
modulo della risposta in frequenza è solitamente riportato in db, ovvero
20 log(|G(iΩ)|). Per il sistema massa-molla forzato di figura 5.7, i diagrammi di Bode della risposta in frequenza G(ıΩ) sono riportati in figura 5.8.
Dal diagramma del modulo si osserva che la sensibilità della risposta alla
forzante dipende dalla pulsazione della forzante stessa. A parità di ampiezza
del segnale in ingresso, l’ampiezza del segnale in uscita dipende solamente
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
95
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
|G(iΩ)|db
-50
-60
-70
-80
-90
-100
-110
-120
0.1
arg |G(iΩ)|
0
1
10
100
1000
1
10
100
1000
log Ω
-20
-40
-60
-80
-100
-120
-140
-160
-180
0.1
log Ω
Figura 5.8: Diagrammi di Bode del modulo e della fase per il sistema del
secondo ordine di figura 5.7
dal modulo della risposta in frequenza. Per il diagramma rappresentato in
figura risulta che se il segnale in ingresso ha pulsazione Ω < 10 rad/s, l’ampiezza della forzante si ripercuote efficacemente sull’ampiezza della risposta.
Se il segnale in ingresso ha una pulsazione Ω = 1000 rad/s, l’ampiezza della
risposta è 1000 volte più piccola rispetto al caso precedente.
La risposta in frequenza dei sistemi lineare è allora selettiva rispetto alla
frequenza del segnale in ingresso. Ovvero l’effetto che il segnale in ingresso
ha su quello in uscita dipende dalla risposta in frequenza G(iΩ) e quindi
dalla funzione di trasferimento.
Nel caso in cui il segnale di ingresso sia composto dalla somma di più
segnali sinusoidali, con diversa frequenza, vale il principio di sovrapposizione
degli effetti (il sistema è lineare), per cui la risposta corrisponde alla somma
delle risposte dei singoli segnali in ingresso.
La figura 5.9 mostra la risposta del sistema di figura 5.7 per un ingresso
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
96
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
composto dalla somma di tre segnali sinusoidali, di ampiezza unitaria ma
con diversa pulsazione. Nella prima colonna, dall’alto verso il basso, sono
indicate le singole componenti della forzante ed infine la loro somma. Nello
colonna di destra, dall’alto verso il basso, le corrispondenti risposte alle
singole componenti del segnale ed infine la loro somma.
• prima componente: Ω1 = 10 rad/s, ampiezza unitaria
Il modulo della risposta in frequenza (figura 5.8) |G(iΩ1 )| è leggermente più elevato di quello in continua pari a |G(i0)| = 1/k = 0.001.
La risposta a tele ingresso, dalla figura 5.9, ha ampiezza di poco più
elevata di 0.001 e sfasamento quasi nullo;
• seconda componente: Ω2 = 20 rad/s, ampiezza unitaria
Il modulo della risposta in frequenza (figura 5.8) |G(iΩ2 )| è anche in
questo caso poco più elevato di quello in continua pari a |G(i0)| =
1/k = 0.001. La risposta a tele ingresso, dalla figura 5.9, ha ampiezza
di 0.0014 e sfasamento di circa 40◦ ;
• terza componente: Ω3 = 100 rad/s, ampiezza unitaria
Il modulo della risposta in frequenza (figura 5.8) |G(iΩ3 )| è circa 1/10
rispetto ai casi precedenti. La risposta a tele ingresso, dalla figura 5.9,
ha ampiezza di circa 0.0001 ed uno sfasamento di prossimo ai 170◦ ;
La risposta complessiva, rappresentante lo spostamento della massa, non
è influenzata dalla componente di pulsazione Ω3 , e risente dello sfasamento introdotto dalla componente di pulsazione Ω2 . Complessivamente ha
pertanto lo stesso andamento della forzante, a meno delle componenti ad
elevata frequenza che vengono filtrate dal sistema.
Questa comportamento del sistema vine detto passa basso, ad indicare
il fatto che solo le componenti al di sotto di una certa frequenza influenzano
l’uscita (la risposta) del sistema. Per i sistemi di questo tipo si definisce
come larghezza di banda quel range di frequenze che vanno da quella nulla
fino a quella in cui il modulo della risposta in frequenza |G(iΩ)| è tale per
cui è ancora verificata la relazione
√
|G(0)|
√
≤ |G(iΩ)| ≤ 2|G(0)| .
2
(5.36)
Questa espressione, se espressa in db, risulta
|G(0)|db − 3db ≤ |G(iΩ)|db ≤ |G(0)|db + 3db ,
(5.37)
per cui la larghezza di banda può essere definita come quel range di frequenza che vanno dalla frequenza nulla fino alla frequenza per la quale il
modulo della risposta in frequenza si scosta non più di 3db dalla valore in
continua (figura 5.10).
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
97
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
ingressi
sin Ωi t
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
uscite
|G(iΩi )| sin(Ωi t + arg G(iΩi ))
0.0015
0.001
0.0005
0
-0.0005
-0.001
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7
t -0.0015
0
+
0.1 0.2 0.3 0.4 0.5 0.6 0.7
t
+
0.0015
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
0.001
0.0005
0
-0.0005
-0.001
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7
t -0.0015
0
+
0.1 0.2 0.3 0.4 0.5 0.6 0.7
t
+
0.00015
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
0.0001
5e-005
0
-5e-005
-0.0001
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7
3
2
1
0
-1
-2
-3
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7
t-0.00015
0.0025
0.002
0.0015
0.001
0.0005
0
-0.0005
-0.001
-0.0015
-0.002
t -0.0025
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7
t
t
Figura 5.9: Segnali in ingresso ed in uscita dal sistema di figura 5.7
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
98
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
Figura 5.10: Larghezza di banda per un sistema passa basso
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
99
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
5.3.1
Diagrammi asintotici di Bode
I diagrammi di Bode del modulo e della fase della funzione di trasferimento
sono ottenibili dallo studio di funzione delle corrispondenti funzioni. Esistono opportuni programmi software che determinano i diagrammi di Bode
a partire dai coefficienti dei polinomi al numeratore e denominatore della
funzione di trasferimento.
Gli andamenti qualitativi dei diagrammi, indicati come diagrammi asintotici di Bode, possono essere ottenuti analizzando solamente il guadagno
in continua della funzione di trasferimento, il tipo ed il modulo degli zeri e dei poli. Per la determinazione dei diagrammi asintotici conviene far
riferimento alla forma fattorizzata della funzione dei trasferimento 5.7
Q
Q
2
2
i (1 + τi s)
l (1 + 2hl s/α0l + s /α0l )
Q
G(s) = µ g Q
(5.38)
2 .
2
s
m (1 + Tm s)
k (1 + 2hk s/ω0 k + s /ω0 k )
Diagramma asintotico del modulo
Il diagramma asintotico di Bode del modulo rappresenta il modulo espresso
in db della funzione di trasferimento calcolata per s = iΩ
Q
Q
·
¸
2
2
i (1 + τi iΩ)
l (1 + 2hl iΩ/α0l − Ω /α0l )
Q
Q
|G(iΩ)|db = 20 log µ
(iΩ)g m (1 + Tm iΩ) k (1 + 2hk iΩ/ω0 k − Ω2 /ω0 2k )
(5.39)
da cui applicando le proprietà dei logaritmi si ottiene
X
|G(iΩ)|db = 20 log µ +
20 log |1 + τi iΩ| . . .
i
X
+
20 log |1 + 2hl iΩ/α0l − Ω2 /α02l | . . .
l
X
(5.40)
−20 log |iΩ|g −
20 log |1 + Tm iΩ| . . .
m
X
−
20 log |1 + 2hk iΩ/ω0 k − Ω2 /ω0 2k | .
k
L’espressione cercata è allora la somma algebrica di un certo numero
di termini, una parte dei quali rappresenta il contributo degli zeri, mentre
un’altra parte il contributo dei poli. Il contributo dei vari termini dipende
essenzialmente dal valore della pulsazione Ω a cui si vuole determinare il
diagramma. Ricordando che sull’asse delle ascisse viene riportato il log Ω,
il contributo dei termini risulta:
1. Il termine 20 log µ rappresenta il contributo del guadagno in continua.
Il diagramma della funzione di trasferimento, in assenza si poli o zeri
nell’origine, parte allora dal valore di µ espresso in db in quanto tutti
gli altri termini sono nulli per Ω = 0. Il diagramma manterrà questo
valore fino a che il contributo degli altri termini rimane trascurabile.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
100
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
|Ga (iΩ)|db
60
g=0
g=1
g=2
g=-1
40
20
0
-20
-40
-60
-80
-100
-120
0.1
1
10
100
1000
log Ω
Figura 5.11: Diagrammi di Bode asintotico per il termine Ga (s) = 1/sg
2. Il termine −20 log |iΩ|g = −20g log Ω rappresenta il contributo dei
poli (g > 0) o degli zeri (g < 0) nell’origine. Allora nel piano
log Ω − |G(iΩ)|db questo termine rappresenta un retta la cui pendenza
è −20g db/decade, dipendente quindi dalla molteplicità dei poli o degli zeri. Nel caso in cui la funzione di trasferimento non abbia né poli
né zeri nell’origine (g = 0), questo termine non influenza l’andamento
del diagramma. Il contributo di questo termine è riportato in figura
5.11.
P
3. Il termine − m 20 log |1 + Tm iΩ| rappresenta il contributo dei poli
reali pm = −1/Tm . Per ogni polo reale il contributo risulta
p
£
¤
2 Ω2 = −10 log T 2 (1/T 2 + Ω2 ) .
−20 log 1 + Tm
m
m
Nel caso in cui sia Ω << 1/Tm (Ω << pm ), ovvero quando Ω è
molto più piccolo del modulo del polo, il contributo del termine è
nullo (log 1 = 0). Nel caso in cui sia Ω >> 1/Tm (Ω >> pm ), ovvero
quando Ω è molto più grande del modulo del polo, il contributo del
termine è
−20 log Ω
che nel piano log Ω − |G(iΩ)|db rappresenta una retta con pendenza
di −20 db/decade. Nel caso in cui siano presenti dei poli reali coincidenti, la pendenza sarà para a −20 volte la moltiplicità del polo reale.
Riassumendo risulta
−20 log 1 = 0 Ω << 1/Tm
−20 log |1 + Tm iΩ| '
−20 log Ω Ω >> 1/Tm
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
101
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
|Gb (iΩ)|db
10
esatto
asintotico
5
0
-5
-10
-15
-20
1
10
100
1000
log Ω
Figura 5.12: Diagrammi di Bode asintotico per il termine Gb (s) = 1/(1 +
Tm s), per Tm = 0.01
I due andamenti asintotici hanno in comune il punto di ascissa Ω =
1/Tm , come mostrato in figura 5.12.
P
4. Il termine − k 20 log |1 + 2hk iΩ/ω0 k − Ω2 /ω0 2k | rappresenta il contributo dei poli complessi coniugati, con modulo ω0k . Il contributo
è
q
−20 log
(1 − Ω2 /ω0 2k )2 + (2hk Ω/ω0 k )2 .
Nel caso in cui sia Ω << ω0 k tale contributo è nullo (log 1 = 0). Nel caso in cui sia Ω >> ω0 k tale contributo è 20 log Ω2 che nel piano log Ω−
|G(iΩ)|db rappresenta una retta con pendenza di −40 db/decade. Riassumendo risulta
−20 log 1 = 0 Ω << ω0 k
−20 log |1 + 2hk iΩ/ω0 k − Ω2 /ω0 2k | '
−40 log Ω Ω >> ω0 k
I due andamenti asintotici hanno in comune il punto di ascissa Ω =
ω0 k . L’andamento asintotico delineato non tiene ovviamente conto
dell’eventuale picco di risonanza in prossimità di Ω = ω0k , come mostrato nel paragrafo 4.1. Si ricorda che i poli risultano complessi coniugati se 0 < h < 1, e che il picco di risonanza non si presenta per
h > 0.75. Il contributo di questo termine è riportato in figura 5.13.
P
5. Il termine i 20 log |1 + τi iΩ| rappresenta il contributo degli zeri reali.
Il suo effetto è determinabile dall’analisi fatta sui poli reali. L’unica differenza è il segno del termine, per cui il contributo introdotto
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
102
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
|Gc (iΩ)|db
50
h = 0.1
h = 0.4
h = 0.75
asintotico
40
30
20
10
0
-10
-20
-30
-40
1
10
100
1000
log Ω
Figura 5.13: Diagrammi di Bode asintotico per il termine Gc (s) = 1/(1 +
2hk s/ω0 k + s2 /ω0 2k ), per ω0 k = 100
coincide con quello dei poli reali a meno del segno.
20 log 1 = 0 Ω << 1/τi
20 log |1 + τi iΩ| '
20 log Ω Ω >> 1/τi
P
6. Il termine l 20 log |1 + 2hl iΩ/α0l − Ω2 /α02l | rappresenta il contributo
degli zeri complessi coniugati. Il suo effetto è determinabile dall’analisi
fatta sui poli complessi coniugati. L’unica differenza è il segno del
termine, per cui il contributo introdotto coincide con quello dei poli
complessi coniugati a meno del segno.
20 log 1 = 0 Ω << α0l
20 log |1 + 2hl iΩ/α0l − Ω2 /α02l | '
40 log Ω Ω >> α0l
Diagramma asintotico della fase
Per la determinazione del diagramma asintotico della fase si deve considerare
il contributo dei termini analizzati discutendo del diagramma del modulo.
Ad una determinata pulsazione Ω si devono considerare tutti i poli e gli
zeri che hanno modulo minore di Ω. Ogni zero che soddisfa tale condizione
introduce uno sfasamento di +90◦ , mente ogni polo che soddisfa la condizione introduce uno sfasamento di −90◦ . La fase in continua (quindi quella
iniziale) è pari a 0 se µ > 0, altrimenti è −180◦ se µ < 0.
La figura 5.14 riporta il diagramma di bode asintotico del sistema del
secondo ordine di figura 5.7.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
103
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
|G(iΩ)|db
-50
-60
-70
-80
-90
-100
-110
-120
0.1
arg |G(iΩ)|
0
1
10
100
1000
1
10
100
1000
log Ω
-20
-40
-60
-80
-100
-120
-140
-160
-180
0.1
log Ω
Figura 5.14: Diagrammi di Bode asintotici del modulo e della fase della
figura 5.8
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
104
CAPITOLO 5. FUNZIONI DI TRASFERIMENTO
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
Capitolo 6
Introduzione al controllo
dei sistemi meccanici
In questo capitolo vengono introdotti i concetti fondamentali del regolazione
dei sistemi meccanici, facendo riferimento al controllo di sistemi meccanici
movimentati da alcuni tipi di sistemi azionamento.
Vengono inizialmente presentati i modelli di alcuni sistemi di azionamento e successivamente sviluppate le tecniche di regolazione più diffuse in
ambito industriale. La parte di controllo farà riferimento a sistemi lineari o
comunque linearizzati in un intorno della posizione di funzionamento.
6.1
Modello motore corrente continua
In questa parte vengono messi in rilievo i principi di funzionamento dei motori in corrente continua, con particolare riferimento alle caratteristiche che
li rendono adatti alle applicazioni richiedenti il controllo del movimento. Per
questo tipo di applicazioni la tensione e la corrente di alimentazione del motore vengono opportunamente imposte per mezzo di azionamenti elettronici
di potenza.
Durante il funzionamento di un motore elettrico viene trasformata energia elettrica in energia meccanica o, in particolari condizioni, la trasformazione inversa. Il bilancio energetico di tale trasformazione, con riferimento
alla figura 6.1, può essere dedotto dalle seguenti leggi: se un conduttore di
lunghezza l si muove in un campo magnetico, descritto dal flusso magnetico
B, con velocità v si genera una forza elettro motrice e
e = lB · v
105
(6.1)
106
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
i
F
i
F
B
B
Figura 6.1: Leggi fondamentali per il funzionamento del motore c.c.
Se un conduttore percorso da corrente i viene posto in un campo magnetico,
descritto dal flusso magnetico B, è soggetto ad una forza
F = lB · i.
(6.2)
Per generare coppia all’albero del motore si deve quindi creare un campo magnetico in cui disporre uno o più conduttori percorsi da corrente.
Per raggiungere tale scopo si utilizzano due avvolgimenti, in uno dei quali
viene imposta la corrente di alimentazione per generare il campo magnetico di intensità desiderata, mentre nell’altro viene imposta una tensione di
alimentazione, da cui dipende il valore della corrente che ne percorre gli avvolgimenti. In alcuni casi viene imposta la corrente anche in questo secondo
avvolgimento.
L’avvolgimento in cui viene imposta la tensione di alimentazione è detto
avvolgimento di armatura, solitamente è l’avvolgimento rotorico, ed in esso
circola la corrente che interagisce con il flusso magnetico B, responsabile
della generazione della coppia. L’avvolgimento in cui si impone la circolazione della corrente per la generazione del campo magnetico viene detto
avvolgimento di campo, o avvolgimento statorico.
In un motore corrente continua viene imposta una corrente all’avvolgimento di campo per creare il flusso di campo magnetico all’interno della
macchina. Per ottenere coppia sul rotore della macchina è necessario rendere solidale con il rotore una o più spire percorse da corrente. Queste spire
costituiscono l’avvolgimento rotorico e vengono connesse con l’alimentazione
esterna per mezzo di un collettore a lamelle. Il collettore ha un certo numero di coppie di lamelle, disposte in senso assiale, fra di loro elettricamente
isolate, su cui strisciano le spazzole e a cui sono collegate gli avvolgimenti
del rotore. La continuità elettrica fra alimentazione e spire del rotore collegate al collettore è garantita da contatti striscianti detti spazzole (realizzate
nella maggior parte dei casi in grafite).
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
avvolgimento di campo
collettore
spazzola
F
107
spira
θ
F
B
Figura 6.2: Motore corrente continua elementare
L’alimentazione applicata dall’esterno è una tensione continua, da cui
deriva il nome dato a questo tipo di macchine.
Se l’avvolgimento rotorico è costituito da una sola spira (vedi figura 6.2)
la coppia applicata al rotore dipende dalla proiezione della forza F applicata
all’avvolgimento sulla perpendicolare al piano passante per l’asse del rotore,
che lo contiene, ha quindi andamento sinusoidale ed è massima per θ = 0,
nulla per θ = 90. In quest’ultima posizione il motore non è in grado di
funzionare, per generare coppia un sistema ad una sola spira come quello
descritto deve spostarsi da questa posizione.
Quando il rotore è ruotato per più di 90 gradi, il verso della tensione
di alimentazione applicata alla spira viene invertito per la nuova posizione
relativa fra collettore e spazzole, il verso delle forze applicate alla spira si inverte. Questo permette di generare una coppia motrice sempre nello stesso
verso e quindi di far ruotare il rotore in continuazione. La tensione applicata
sull’avvolgimento di armatura è quindi alternata, spazzole e collettore funzionano da inverter, convertono la tensione continua in alternata, quando
il flusso di energia va dal motore verso il carico, da rettificatore, convertono
la tensione da alternata in continua, in caso contrario.
L’inversione della polarità di alimentazione della spira di armatura deve
avvenire quando la corrente che fluisce in essa è nulla, in caso contrario l’energia residua presente nella spira viene dissipata bruscamente sotto forma
di scintillio fra spazzole e collettore. L’istante in cui la corrente si annulla
dipende dai parametri elettrici della spira (induttanza e resistenza) e dal
valore della forza contro-elettro motrice (f.c.e.m).
Nel rotore vengono poste più spire a costituire l’avvolgimento di armatura, esse possono essere avvolte sul rotore e collegate ai segmenti del collettore
in vario modo, un esempio di questi (lap-winding) è riportato in figura 6.3
a).
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
108
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
espansioni polari
spira
collettore
spazzola
ia
Va
Figura 6.3: a) Schematizzazione rotore, b) Schematizzazione della
connessione delle spire.
In questo tipo di schematizzazione supponiamo che i due rami che costituiscono la spira, sezionati nella figura, siano sfasati fra di loro di 180 gradi,
ovvero la spira appartenga ad un piano passante per l’asse del rotore come
precedentemente illustrato. È possibile rilevare che in metà dei rami delle
spire degli avvolgimenti la corrente fluisce in un senso, nell’altra metà nel
verso opposto. In particolare i conduttori con la croce identificano quelli
che sono percorsi da corrente che entra nel piano del disegno, mentre quelli
con il pallino sono percorsi da corrente che esce dal piano del foglio.
Per alimentare gli avvolgimenti del rotore in questo modo, si ricorre
ad un collegamento fra le varie spire come quello rappresentato in figura
6.3 b). In questa figura si osserva che, in funzione della posizione spazzole/collettore, ci sono due circuiti costituiti dalle spire collegate in serie,
percorse da corrente di verso opposto, a seconda che si parta dalla spira a fino al punto b in senso antiorario oppure in senso orario. In questa posizione
la spira a è ortogonale al campo (f.c.e.m nulla), viene quindi chiusa in corto
circuito in modo che la corrente che in essa fluisce possa annullarsi, per poi
cambiare verso nella successiva commutazione. L’energia immagazzinata
dall’induttanza della spira viene dissipata sulla resistenza complessiva della
spira. Il tempo in cui la corrente all’interno della spira si annulla dipende
dai valori di induttanza e di resistenza della spira stessa.
Se la f.c.e.m non è nulla, le spire che stanno per commutare (sono cortocircuitate su sè stesse) sono soggette ad una corrente di corto circuito che
produce calore, coppia frenante e scintillio fra spazzole e collettore. Per
ridurre queste perdite di energia la commutazione delle spire avviene in una
zona neutra, ovvero in una zona in cui il flusso di campo magnetico è nullo.
Le zone in cui il flusso esiste vengono dette zone polari. Si osservi nella
figura 6.3 che la zona neutra è quella in cui il rotore sporge dalle espansioni
polari.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
6.1.1
109
Modello elettrico
In questo paragrafo viene discusso il modello elettrico del motore, mettendo
in evidenza come le caratteristiche fisiche del motore e le grandezze di comando del motore, tensioni e correnti, influenzano la velocità del rotore e la
coppia prodotta. Si farà riferimento soprattutto al motore corrente continua
a magneti permanenti.
Figura 6.4:
permanenti
Modello elettrico motore in corrente continua a magneti
Con riferimento alla figura 6.4 per l’avvolgimento di armatura è possibile
scrivere l’equazione
di
Va = iR + L + Vcem
(6.3)
dt
in cui Vcem è la forza contro elettromotrice. Il valore di quest’ultima e della
coppia erogata viene determinata per mezzo della 6.1 e della 6.2. Vcem è
proporzionale alle dimensioni degli avvolgimenti, alla velocità di rotazione
del rotore e al campo magnetico, quindi all’intensità del campo magnetico.
Vcem = Kv ω .
(6.4)
La coppia prodotta al rotore sarà proporzionale alle dimensioni degli
avvolgimenti, alla corrente di armatura ia che li attraversa e al campo
magnetico, quindi all’intensità campo magnetico
Mm = Kt i .
(6.5)
In condizioni di regime (i = cost), le relazioni precedenti costituiscono un
sistema lineare dal quale è possibile ricavare l’equazione della curva caratteristica del motore, che lega la coppia prodotta alla velocità di rotazione
del motore
Kt Kv
Va K t
−
ω.
(6.6)
Mm =
R
R
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
110
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
Figura 6.5:
permanenti
Curva caratteristica motore corrente continua a magneti
Le costanti di velocità Kv e di coppia Kt del motore, se espresse nel sistema
internazionale, hanno lo stesso valore numerico, quindi vengono in generale
indicate con K. Per questo sistema di misura la K può essere espressa in
V
Nm
Arad/s per determinare la Vcem e in A per determinare la coppia prodotta
dal motore.
La curva caratteristica ottenuta, rappresentata in figura 6.5, è allora
una retta, con pendenza negativa −K 2 /R, dipendente dalle caratteristiche
del motore (avvolgimenti e campo magnetico). I punti di intersezione della
curva caratteristica con l’asse delle ascisse è ω0 = Va /K, mentre il punto
di intersezione con l’asse delle ordinate è Va K/R. La curva caratteristica trasla al variare della tensione di alimentazione, si sposta verso destra
all’aumentare della tensione di alimentazione.
Mm =
6.1.2
Va K
K2
−
ω.
R
R
(6.7)
Comportamento dinamico
L’analisi del comportamento dinamico di un motore in corrente continua,
accoppiato ad un carico puramente inerziale Jr0 ridotto all’albero del motore,
come rappresentato in figura 6.6, può essere facilmente condotta analizzando
la funzione di trasferimento fra tensione applicata al motore Va e velocità
di rotazione ω del motore.
La coppia prodotta dal motore sarà allora equilibrata dalla coppia d’inerzia
Mm = (Jm + Jr0 )ω̇ ,
(6.8)
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
111
Figura 6.6: Motore in c.c. con carico puramente dinamico
Figura 6.7: Diagrammi di Bode della funzione di trasferimento del motore
in c.c.
per cui ricordando la 6.5 si ottiene
i=
(Jm + Jr0 )ω̇
.
K
(6.9)
Sostituendo questa espressione nella 6.3 si ottiene
Va =
(Jm + Jr0 )ω̇
R + Li̇ + Kω .
K
(6.10)
La funzione di trasferimento cercata può essere facilmente determinata
trasformando con Laplace le relazioni 6.9 e 6.3. Si ottiene
I(s) =
(Jm + Jr0 )
sΩ(s)
K
Va (s) = RI(s) + LsI(s) + KΩ(s)
(6.11)
(6.12)
da cui, eliminando I(s) si ottiene
Va (s) = (R + Ls)
(Jm + Jr0 )
sΩ(s) + KΩ(s)
K
(6.13)
e quindi la funzione di trasferimento
1
1
Ω(s)
=
Va (s)
K (1 + τe s)τm s + 1
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
(6.14)
prof. Paolo Righettini - Università di Bergamo
112
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
|G(iω)|
100
τe = τm
τe = 0.05τm
τe = 0
10
1
0.1
0.01
0.1
1
10
100
1000
10000
log ω
Figura 6.8: Influenza di τe sulla funzione di trasferimento del motore in c.c.
Figura 6.9: Diagrammi di Bode della funzione di trasferimento del motore
in c.c. considerando solo τm
in cui τe è la costante di tempo del circuito elettrico di armatura
τe =
L
,
R
(6.15)
mentre τm è la costante di tempo meccanica
τm = R
Jm + Jr0
RJ
= 2 .
2
K
K
(6.16)
In generale la costante di tempo elettrica è molto più bassa di quella
meccanica (τe << τm ), ed in prima approssimazione si potrebbe considerare
solo la costante di tempo meccanica.
Nel caso generale la funzione di trasferimento ha allora due poli
s
p
2 − 4τ τ
−τm ± τm
1
τm − 4τe
e m
p1,2 =
=−
±
(6.17)
2τe τm
2τe
4τe2 τm
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
113
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
|G(iω)|
10
K
2K
4K
1
0.1
0.01
0.1
1
10
100
1000
10000
log ω
Figura 6.10: Influenza di K sulla funzione di trasferimento del motore in
c.c.
Le soluzioni risultano complesse coniugate se τe > 14 τm , in questo caso
la funzione di trasferimento 6.14 può essere scritta nella forma
1
1
ω(s)
=
2
2
Va (s)
K s /ω0 + s2h/ω0 + 1
(6.18)
nella quale si riconoscono i termini caratteristici di un
p sistema vibrante,
√
ω0 = 1/ τe τm è la pulsazione propria, mentre h = 12 τm /τe è l’indice di
smorzamento.
Il comportamento di regime può essere analizzato studiano il diagramma
di Bode della funzione di trasferimento, rappresentato per modulo e fase in
figura 6.7, nelle quali è indicato il guadagno in continua 1/K ed il modulo
dei poli complessi coniugati ω0 .
Nel caso in cui sia τe << τm (figure 6.8), la costante di tempo elettrica
può essere trascurata rispetto a quella meccanica in quanto la larghezza di
banda è determinata principalmente dalle caratteristiche meccaniche (rappresentate dal polo 1/τm ). In questo caso la funzione di trasferimento può
assumere la forma che mette in evidenza il solo polo meccanico
pm =
G(s) =
K2
R(Jm + Jr0 )
(6.19)
Ω(s)
1
1
=
.
Va (s)
K τm s + 1
(6.20)
Il diagramma asintotico di Bode è riportato nella figura 6.9.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
114
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
M
10
K
2K
4K
8
6
4
2
0
ω
0
100
200
300
400
500
600
Figura 6.11: Influenza di K sulla curva caratteristica del motore in c.c., a
parità di tensione di alimentazione
In ogni caso il modulo dei poli complessi coniugati e del semplice polo
meccanico aumenta al diminuire dell’inerzia J = Jm + Jr0 complessiva e all’aumentare della costante di coppia K del motore. Un aumento del modulo
dei poli indica un aumento della velocità di risposta del sistema. L’influenza
della costante K sulla funzione di trasferimento e sulla curva caratteristica
è rappresentata nelle figure 6.10 e 6.11. All’aumentare della costante caratteristica K del motore diminuisce però il guadagno in continua, ovvero a
parità di tensione di alimentazione si ottengono velocità di regime minori.
Questo comportamento è mostrato in figura 6.11 in cui, a parità di tensione
di alimentazione, un aumento di K porta ad un aumento della pendenza e
ad un arretramento della curva caratteristica.
Va +
- h 6−
1
R(1+sτe )
I
- K
Mr
Mm
+ ?−
- h -
1
sJ
ω
-
Vcem
K ¾
Figura 6.12: Schema a blocchi del motore CC ad anello aperto
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
115
Le relazioni precedenti possono essere rappresentate per mezzo dello
schema a blocchi di figura 6.12. Da questo diagramma si può ottenere la
variazione di velocità ω ad un gradino di coppia resistente Mr .
G2 (s) =
(1 + sτe )Ra
(1 + sτa )Ra /K 2
ω(s)
=− 2
=
Mr (s)
K + (Ra + sL)Jm s
1 + (1 + sτe )sτm
(6.21)
Il denominatore di queste relazioni presenta due soluzioni (due poli) alle
pulsazioni
s
p
2 − 4τ τ
−τm ± τm
τm − 4τe
1
e m
p1,2 =
=−
±
(6.22)
2τe τm
2τe
4τe2 τm
La risposta in condizioni di stazionarietà (regime) ad un gradino U (s) =
∆Mr /s di coppia esterna, può essere determinata ricorrendo al teorema del
valore finale
∆Mr
G2 (s)
(6.23)
∆ω = lim s
s→0
s
per cui la risposta a transitorio esaurito può essere determinata ponendo
s = 0 nella 6.21
R
∆ω = − 2 ∆Mr .
(6.24)
K
Si osserva che al crescere della costante K del motore diminuisce la sensibilià
ai disturbi di coppia provenienti dal carico. Infatti un aumento di K implica
un aumento della pendenza della curva caratteristica del motore (figura
6.11), il parametro K 2 /R rappresentà perciò la rigidezza del motore.
6.2
Accoppiamento statico con il carico
Figura 6.13: Motore accoppiato ad un utilizzatore
Il sistema motore-utilizzatore di figura 6.13, ha un punto di funzionamento statico raggiunto in condizioni di regime elettrico e meccanico, definito dall’intersezione delle curve caratteristiche del motore e del carico,
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
116
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
quest’ultima proiettata all’asse del motore, come rappresentato in figura
6.14.
Figura 6.14: Punto di funzionamento di regime
Il punto di funzionamento di regime è caratterizzato dalle coordinate
ω̄, M̄ , e dipende dalle due curve caratteristiche. La velocità di regime ω̄
calcolata, sarà tanto più corrispondente a quella realmente ottenibile (accoppiando il motore all’utilizzatore) tanto più le curve caratteristiche tracciate,
dipendenti dal modello matematico del motore e del carico, rappresentano le condizioni di funzionamento di regime di motore e carico. Dipende
essenzialmente dalla bontà di tali modelli rispetto al comportamento reale
degli effettivi dispositivi, funzione della stima dei parametri, numero dei
parametri utilizzati, ecc..
Le incertezze, in generale non note, sui modelli che identificano le due
curve caratteristiche possono essere rappresentate da un termine addizionale
rispetto al modello nominale di motore e carico. Per il motore l’effettiva
curva caratteristica può essere espressa dalla relazione
Mm = Mmn (Va , ω) + Mmd (t, pm )
(6.25)
in cui Mmn rappresenta il modello nominale del motore, mentre il termine
Mmd rappresenta il contributo delle incertezze dei parametri o di disturbi
esterni. Il vettore pm identifica un insieme di parametri responsabili dello
scostamento del motore dal comportamento nominale. Fra questi parametri
possono ad esempio rientrare la tolleranza dei parametri caratteristici del
motore, come la resistenza R di armatura o la costante K di coppia del
motore. Nel caso di motore ideale è Mmd = 0. Analogamente per la curva
caratteristica del carico
Mr = Mrn (ω) + Mrd (t, pr ) .
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
(6.26)
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
117
Nelle condizioni di equilibrio statico dovrà pertanto risultare Mm = Mr
Mmn (Va , ω) + Mmd (t, pm ) = Mrn (ω) + Mrd (t, pr )
(6.27)
dalla quale, per una prefissata tensione Va , è possibile determinare la velocità ω̄ di funzionamento di regime. Tale risultato dipende non solo dalle
caratteristiche nominali di motore ed utilizzatore, ma anche da quanto essi
si scostano dalle condizioni nominali di funzionamento.
L’effettiva velocità di regime ω̄ dipende perciò da parametri a priori non
noti, o difficilmente identificabili, e non è possibile in generale ottenere un
modello analitico che permetta di determinare la tensione Va di alimentazione necessaria affinché il motore accoppiato al carico raggiunga una velocità
di funzionamento richiesta ω̄r . Questo problema è ulteriormente rimarcato
se si considera una serie di dispositivi, costituiti da motori accoppiati ad
utilizzatore, nominalmente uguali fra loro. In realtà i dispositivi della serie citata non sono fra di loro uguali, basti solo pensare alla tolleranza con
cui sono realizzati ed alle diverse condizioni operative (si pensi ad esempio all’influenza della temperatura sugli attriti e sul valore della resistenza
elettrica del circuito di armatura).
I modelli nominali di motore (Mmn ) e carico (Mrn ) non permettono
quindi, nei casi in cui essi non tengano adeguatamente conto di tutti i parametri che partecipano alla descrizione del problema fisico, di determinare
la reale dipendenza della velocità di regime dalla tensione di alimentazione
del motore.
Questo concetto è chiaramente estendibile a tutti gli altri casi in cui
si debba determinare la dipendenza della variabile fisica di interesse, detta
variabile controllata (in questo caso la velocità di regime), dalla variabile
fisica di comando, detta variabile di controllo (in questo caso la tensione di
alimentazione del motore).
6.3
Controllo in anello aperto
I modelli nominali di motore (Mmn ) e carico (Mrn ) permettono allora solo
una stima della tensione di alimentazione del motore necessaria all’ottenimento della velocità di regime richiesta ω̄r , in generale si otterà una velocità
di regime ω̄ 6= ω̄r . Una possibile soluzione è l’introduzione di una sistema
di regolazione ad anello aperto basato sulla conoscenza del comportamento
statico del sistema.
La dizione anello aperto sta ad indicare che il segnale imposto al sistema,
in questo caso la tensione di alimentazione del motore, viene imposta senza
considerare l’effettiva risposta del sistema.
La determinazione del reale comportamento statico del sistema, ovvero
la determinazione della dipendenza della velcità di regime dalla tensione di
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
118
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
Figura 6.15: Curva di taratura e blocco rappresentativo
alimentazione, è ottenibile efficacemente per via sperimentale. Si tratta allora di determinare la curva di taratura dell’intero sistema, motore accoppiato
all’utilizzatore (figura 6.13). L’attività sperimentale prevede l’applicazione
di un insieme di valori di tensioni di alimentazioni Va , di attendere per ognuna di esse l’instaurarsi delle condizioni di regime, e quindi misurare la reale
velocità di regime ottenuta. La curva di taratura (figura 6.15) è l’insieme
di questi punti determinati sperimentalmente, che hanno ascisse corrispondenti alla reale velocità di regime raggiunta, e ordinate corrispondenti alla
tensione di alimentazione applicata al motore.
Volendo ora determinare la tensione V̄a necessaria per ottenere una velcocità di regime ω̄r , si dovrà individuare sull’asse delle ascisse della curva di
taratura il valore della velocità cercata e determinare in corrispondenza sull’asse delle ordinate il valore della tensione di alimentazione cercato. Questo
utilizzo della curva di taratura piò essere efficacemente rappresentato come
un blocco (figura 6.15) Fw che permette di “trasformare” la velocità richiesta ω̄r in ingresso, nell’uscita corrispondente alla tensione di alimentazione
V̄a cercata.
Nell’insieme, blocco di taratura e sistema (motore ed utilizzatore) possono allora essere rappresentati nello schema a blocchi di figura 6.16.
Figura 6.16: Controllo in anello aperto con blocco di taratura
Tale schema operativo non risolve completamente il problema dell’ottenimento di una prefissata velocità di funzionamento di regime. Basti pensare
al fatto che la taratura introdotta non può soddisfare tutte le condizioni
operative di funzionamento e tutte gli accoppiamenti motore ed utilizzatore
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
119
nominalmente uguali. Inoltre tale approccio non tiene conto del comportamento dinamico dell’intero sistema. L’approccio della regolazione ad anello
chiuso permetterà di eliminare buona parte di queste limitazioni.
6.4
Controllo in anello chiuso
Figura 6.17: Schema di controllo ad anello chiuso
Lo schema di controllo ad anello chiuso si contrappone a quello ad anello
aperto in quanto il segnale di comando imposto al sistema è determinato
istante per istante in funzione della risposta del sistema. Si introduce quindi
un segnale di retroazione che riporta verso l’ingresso le informazioni relative
all’uscita del sistema. Si tratta quindi di introdurre nel sistema un opportuno sensore che permetta la misura della variabile controllata, in modo che
in base al suo valore ed in funzione della logica di regolazione, rappresentata
in figura 6.17 dal blocco R, si imponga un opportuno comando al sistema.
Nello schema presentato in figura, al segnale generato dal blocco di taratura
viene sommato un contributo dipendente dal blocco di regolazione R e dal
suo ingresso ωr − ω, differenza fra la velocità richiesta e la velocità effettiva,
rappresentate istante per istante l’errore di velocità.
Per evidenziare a livello qualitativo, in condizioni di regime, l’effetto della regolazione ad anello chiuso, si ipotizza una legge di regolazione proporzionale all’errore di velocità R = Kp . Il segnale u(t) in ingresso al sistema
sarà u(t) = ωr Fw + Kp (ωr − ω), per cui se la velocità attuale è minore
di quella richiesta ω < ωr , al segnale in uscita dal blocco di taratura viene aggiunto un contributo tendente a ridurre l’effetto dell’errore di velcità,
dovuto a scostamenti del sistema dalla situazione di taratura.
L’introduzione dello schema di controllo ad anello chiuso modifica anche
il comportamento dinamico del sistema. Si valuterà per sistemi lineari o
linearizzati come cambia il comportamento statico e dinamico in funzione
di comuni logiche di regolazione.
L’analisi del contributo della retroazione tramite il blocco di regolazione,
sarà condotto prescindendo dalla parte di taratura.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
120
6.4.1
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
Funzione di trasferimento ad anello chiuso
Per la determinazione del comportamento statico e dinamico dei sistemi ad
anello chiuso si farà riferimento al solo contributo dell’anello di retroazione
presentato in figura 6.18, dedotto da quello di figura 6.17 trascurando la
parte di taratura.
Figura 6.18: Controllo in anello chiuso
Il comportamento dinamico del sistema retroazionato è descritto dalla
funzione di trasferimento H(s) fra il segnale di uscita ω e quello in ingresso
ωr . Il legame fra ingresso ed uscita di un sistema retroazionato può essere
determinato risolvendo lo schema a blocchi nel dominio delle trasformate di
Laplace. Dalla figura 6.18 risulta
(ωr (s) − ω(s))R(s)G(s) = ω(s)
(6.28)
ω(s)
R(s)G(s)
=
.
ωr (s)
1 + R(s)G(s)
(6.29)
da cui si ottiene
H(s) =
Come indicato presentando le caratteristiche delle funzioni di trasferimento, la stabilità del sistema e la sua risposta dinamica sono direttamente
collegate ai poli della H(s). Essi dipendono dal regolatore R(s) utilizzato. Un’accorta scelta del funzione di trasferimento del regolatore permette allora, entro i limiti di linearità del sistema, di ottenere un desiderato
comportamento dinamico del sistema ad anello chiuso.
6.4.2
Regolatori PID
I regolatori lineari più diffusi in ambito industriale sono i regolatori PID,
cosı̀ detti in quanto la loro uscita dipende proporzionalmente (P), dall’integrale (I) e dalla derivata (D) dell’ingresso. Nel dominio delle trasformate
di Laplace la funzione di trasferimento del regolatore PID è
µ
¶
Ki
1
R(S) = Kp + Kd s +
= Kp 1 + Ti s +
(6.30)
s
Td s
in cui le costanti Kp , Kd o Ki (o le equivalenti Kp , Td e Ti ) sono le costanti
delle tre componenti del regolatore.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
121
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
Per valutare il contributo delle componenti si farà riferimento alla regolazione in anello chiuso della velocità di un motore in corrente continua
collegato ad un carico puramente inerziale.
Regolatore proporzionale
In questo caso il regolatore ha funzione di trasferimento R(s) = Kp , mentre
la funzione di trasferimento del motore accoppiato al carico, trascurando
il transitorio della parte elettrica, è espresso dalla 6.20. La funzione di
trasferimento ad anello chiuso risulta allora dalla 6.29
H(s) =
1
1
Kp K
τm s+1
(6.31)
1
1
1 + Kp K
τm s+1
in cui τm = RJ/K 2 (vedi equazione 6.16). Si ottiene
H(s) =
Kp K
Kp
=
RJs + K 2 + KKp
K + Kp
1
RJ
K 2 +KKp s
+1
.
(6.32)
La funzione di trasferimento ha un polo reale negativo
p=−
K2
KKp
−
RJ
RJ
(6.33)
più piccolo in senso algebrico del polo K 2 /RJ (vedi 6.19) della G(s), funzione di trasferimento del sistema motore e carico in anello aperto. Il polo
diventa sempre più piccolo all’aumentare della costante Kp del regolatore,
ad indicare il fatto che il sistema diventa sempre più veloce all’aumentare
di Kp (si veda a tale proposito il paragrafo 5.2.2 di pagina 89). La figura
Figura 6.19: Diagramma asintotico di Bode del modulo di H(s)
6.19 riporta i diagrammi asintotici di bode della funzione di trasferimento
H(s). Da essi si possono avere indicazioni sulla risposta di regime a richieste di velocità con andamento sinusoidale di pulsazione Ω. Il modulo del
polo aumenta con Kp , ad indicare che la larghezza di banda del sistema
aumenta con la costante del regolatore. Inoltre il guadagno in continua
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
122
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
µ = Kp /(K + Kp ) tende al valore unitario all’aumentare del valore di Kp
rispetto a K. Ciò indica che l’ampiezza della velocità in uscita, per frequenze minori di quella di taglio, è tanto più prossima a quella richiesta quanto
più è elevato il valore di Kp rispetto a K.
Figura 6.20: Risposta al gradino unitario della H(s)
La figura 6.20 riporta la risposta al gradino unitario per il sistema ad
anello chiuso. Il valore a cui si assesta la risposta può essere determinato con il teorema del valore finale (vedi paragrafo 5.2.2) ed è pari a
µ = Kp /(K + Kp ). L’errore fra il valore di regime richiesto (unitario) e
quello effettivamente ottenuto tende allora ad annullarsi all’aumentare della costante Kp , come già messo in evidenza dallo studio in frequenza della
H(s). La velocità di risposta al gradino, dipende dal modulo del polo della
H(s). All’aumentare della costante Kp si riduce il tempo di risposta del
sistema, risulta quindi più pronto.
L’aumento di prestazioni dinamiche imputato alla costante Kp del regolatore è valida fino a che l’intero sistema rimane nel campo di linearità in cui
è stato sviluppato il modello. Infatti nella trattazione non si tengono conto
delle inevitabili saturazioni che intervengono sull’effettivo funzionamento del
sistema. Si pensi ad esempio alla limitazione dovuta alla massima tensione
di alimentazione (Va ) applicabile al motore dal sistema di regolazione.
L’introduzione della retroazione rende più insensibile il sistema ai disturbi di coppia applicati dall’esterno. L’analisi dell’influenza dei disturbi
di coppia sul sistema ad anello aperto è stata condotta nel paragrafo 6.1.2
ottenendo la relazione 6.24. Per ripercorrere l’analisi fatta per il sistema
retroazionato si prende in considerazione lo schema a blocchi di figura 6.21,
ottenuto da quello di figura 6.18 a cui si è sostituito al blocco G(s) lo schema
a blocchi di figura 6.12. Considerando solo l’effetto del momento resistente
Mr sull’uscita ω, si ottiene
·
¸
K
1
(−ωKp − Kω)
− Mr
=ω
(6.34)
R
Js
e quindi la funzione di trasferimento
Hd (s) =
R
1
ω
=− 2
.
2
Mr
K + KKp JRs/(K + KKp ) + 1
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
(6.35)
prof. Paolo Righettini - Università di Bergamo
123
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
Figura 6.21: Schema a blocchi per valutare l’influenza di disturbi esterni di
coppia
La risposta in ω ad un gradino di coppia resistente di altezza Mr è rappresentato in figura 6.22. Il valore di regime a cui tende la risposta è, per il
Figura 6.22: Risposta in velocità ad un disturbi di coppia a gradino
teorema del valore finale
ω(∞) = lim s
s→0
Mr
R
Hd (s) = −Mr 2
.
s
K + KKp
(6.36)
Dal confronto di questa relazione con la 6.24, determinata per il sistema in
anello aperto, si osserva che il sistema è tanto più insensibile agli affetti dei
disturbi esterni di coppia tanto più Kp è elevato. Il sistema retroazionato si comporta allora come se il motore avesse una curva caratteristica di
pendenza −K 2 /R − KKp /R, maggiore rispetto a quella ad anello aperto
pari a −K 2 /R. L’effetto è illustrato in figura 6.23. Si osserva che a parità
di ampiezza del disturbo di coppia, la variazione di velocità a transitorio
esaurito nel caso di sistema retroazionato è minore che nel caso ad anello
aperto.
L’effetto che si ottiene dal punto di vista statico con l’introduzione della
retroazione è allora l’aumento di rigidezza del sistema, a parità di carico si
ottengono minori variazioni di velocità. Al limite, per elevati valori di Kp , si
può ottenere una rigidezza infinita, equivalente ad una curva caratteristica
verticale del motore.
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
124
CAPITOLO 6. INTRODUZIONE AL CONTROLLO DEI SISTEMI MECCANICI
Figura 6.23: Effetto di un disturbo di coppia ∆Mr
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
Appendice A
Dal P.L.V. al teorema
dell’energia cinetica
Per un sistema in equilibrio statico con vincoli bilateri, a cui sono applicate
le forze f i nei punti pi , la condizione di equilibrio è espressa secondo il PLV
nella forma
X
f i · δpi = 0
(A.1)
in cui δpi è lo spostamento virtuale invertibile (essendo i vincoli bilateri)
del punto pi .
L’equilibrio di sistemi meccanici in moto vario può essere studiato con la
stessa relazione ricorrendo al principio di D’Alambert, considerando quindi
accanto alle forze attive agenti sul sistema anche le forze d’inerzia. L’espressione risultate sarà allora
X
(f i − mi ai ) · δpi = 0 .
(A.2)
Gli spostamenti virtuali δpi sono per loro definizione quelli compatibili
con i vincoli, prendendoli piccoli a piacere possono essere espressi in funzione
della velocità del punto
δpi = v i dt
(A.3)
per cui
X
f i · v i dt −
X
mi ai · v i dt = 0 .
(A.4)
La componente dell’accelerazione che contribuisce al prodotto scalare con
la velocità è solamente quella tangente alla traiettoria (parallela al vettore velocità v i = vi~t) per cui il contributo delle forze d’inerzia può essere
espresso nella forma
mi ai · v i dt = mi
125
vi ~ ~
t · vi tdt .
dt
(A.5)
126
APPENDICE A. DAL P.L.V. AL TEOREMA DELL’ENERGIA CINETICA
Nel caso in cui la massa mi sia costante l’espressione precedente è la variazione dell’energia cinetica
¶
µ
vi
1
(A.6)
mi ~t · vi~tdt = ∆
mi vi2
dt
2
che porta alla relazione che lega la somma dei lavori compiuti dalle forze motrici, forze resistenti e dissipative alla variazione dell’energia cinetica
dell’intero sistema
¶
X µ1
Lm − Lr − Lp =
∆
mi vi2 .
(A.7)
2
Analogamente, considerando le variazioni nell’intervallo di tempo infinitesimo dt, si ottiene la relazione che esprime il bilancio di potenza
¶
X
X d µ1
mi vi2 .
(A.8)
Wi =
dt 2
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
Appendice B
Trasformata di Laplace
La trasformata di Laplace F (s) di una funzione f della variabile reale t è
definita dall’integrale
Z
+∞
F (s) = L [f (t)] =
f (t)e−st dt
(B.1)
0
dove s = σ + iω è una variabile complessa. La trasformata di Laplace F (s)
della funzione f (t) è una funzione complessa della variabile complessa s,
ed esiste se esiste l’integrale che ne definisce la trasformata. È possibile
dimostrare che la trasformata esiste per un insieme di valori di s appartenenti al semipiano tali per cui <(s) > σ̄ in cui σ̄ > −∞ è detta ascissa di
convergenza.
Analogamente la trasformata inversa (detta antitrasformata) permette
di trasformare la funzione complessa F (s) della variabile complessa s nella
funzione f (t). L’antitrasformata è definita dall’integrale
f (t) = L
−1
1
[F (s)] =
2πi
Z
σ+iω
F (s)est ds ,
σ > σ̄ .
(B.2)
σ−iω
Le due trasformate definiscono una corrispondenza biunivoca fra la funzione f (t), t ≥ 0 e la funzione F (s), ad evidenziare il fatto che le due
funzioni hanno lo stesso contenuto informativo, ovvero rappresentano due
modi diversi di rappresentare lo stesso problema.
Le formule di trasformazione e di antitrasformazione sono poco utilizzate, si utilizzano delle metodologie che possono ricondurre il problema alla
traformazione (antitrasformazione) di funzioni notevoli, di cui è cioè già nota
la trasformata. La tabella B.1 riporta alcune delle trasformate notevoli.
127
128
APPENDICE B. TRASFORMATA DI LAPLACE
f (t)
δ(t) (impulso)
F (s)
1
u(t) (gradino unitario)
1
s
kt (rampa di pendenza k)
k
s2
e−αt
1
s+α
sin ωt
ω
s2 + ω 2
cos ωt
s
s2 + ω 2
p
e−ω0 ht
√
sin( 1 − h2 ω0 t)
2
1 − h ω0
1
s2 + 2ω0 hs + ω02
·
¸
p
p
h
e−ω0 ht cos( 1 − h2 ω0 t) + √
sin( 1 − h2 ω0 t)
1 − h2
·
¸
p
p
h
e−ω0 ht cos( 1 − h2 ω0 t) − √
sin( 1 − h2 ω0 t)
1 − h2
s + 2ω0 h
s2 + 2ω0 hs + ω02
s
s2 + 2ω0 hs + ω02
Tabella B.1: Trasformate di Laplace notevoli, con 0 ≤ h < 1
B.1
Derivazione nel dominio del tempo
Sia f (t) una funzione derivabile, indicando con f˙(t) = df (t)/dt, la trasformata di Laplace della funzione derivata f˙(t) è
h
i
L f˙(t) = sF (s) − f (0)
(B.3)
dove F (s) è la trasformata di Laplace della primitiva della f˙(t), F (s) =
L [f (t)], mentre f (0) è il valore che assume la funzione f (t) all’istante t = 0
(condizione iniziale). Estendendo alla derivata seconda si ottiene
h
i
L f¨(t) = s2 F (s) − sf (0) − f˙(0) .
(B.4)
Se la funzione f (t) e le sue n − 1 derivate sono nulle all’istante iniziale t = 0,
risulta
· n
¸
d f (t)
L
= sn F (s) ,
(B.5)
dtn
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
129
APPENDICE B. TRASFORMATA DI LAPLACE
per cui, nelle condizioni poste, è possibile introdurre nel dominio della trasformate l’operatore di derivazione s. Moltiplicando nel dominio delle trasformate la funzione complessa F (s) per s equivale a derivare nel dominio
del tempo.
B.2
Integrazione nel dominio del tempo
In modo analogo a quanto visto per l’operatore derivazione nel dominio delle
trasformate, è possibile introdurre l’operatore integrazione. Risulta
·Z
L
0
t
¸
1
f (τ )dτ = F (s) ,
s
(B.6)
per cui l’operatore integrazione è 1/s.
B.3
Linearità
La trasformata e l’antitrasformata di Laplace godono della proprietà di
linearità:
L [αf (t) + βg(t)] = αF (s) + βG(s) ,
(B.7)
ovvero la trasformata di Laplace di una combinazione lineari di funzioni è
pari alla medesima combinazione lineare delle corrispondenti trasformate.
Analogamente per l’antitrasformata
L−1 [αF (s) + βG(s)] = αf (t) + βg(t) .
B.4
(B.8)
Teorema del valore iniziale e finale
È possibile dimostrare che il valore che assume all’istante t = 0 la funzione
f (t) può essere determinato dalla trasformata F (s) dalla relazione
f (0) = lim sF (s)
s→∞
(B.9)
Il valore che assume la funzione f (t) per t = ∞ è determinabile dalla
trasformata F (s) dalla relazione
f (∞) = lim sF (s)
s→0
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
(B.10)
prof. Paolo Righettini - Università di Bergamo
130
B.5
APPENDICE B. TRASFORMATA DI LAPLACE
Trasformate razionali
Di particolare interesse per lo studio dei sistemi dinamici sono le funzioni
razionali fratte
N (s)
(B.11)
D(s)
con N (s) e D(s) polinomi nella variabile complessa s e primi fra loro. Le
radici di N (s) = 0 sono detti zeri, mentre le radici di D(s) = 0 sono detti
poli. Se la funzione f è reale i coefficienti dei due polinomi sono reali.
B.6
Sviluppo di Heavside
Per applicare efficacemente le antitrasformate notevoli indicate nella tabella
B.1 per un funzione razionale F (s) si rende necessario scomporre la funzione
razionale nella somma di funzioni razionali di cui è nota l’antitrasformata.
Per la proprietà di linearità, l’antitrasformata cercata sarà la somma delle
singole trasformate. Viene analizzato il caso in cui la funzione complessa
F (s) =
N (s)
D(s)
(B.12)
abbia il denominatore di grado maggiore rispetto al numeratore. Inoltre,
considerando funzioni f (t) reali, i coefficienti dei polinomi saranno a loro
volta reali. In tali ipotesi, se esistono degli zeri o dei poli non reali, essi
compariranno sempre a coppie complesse coniugate. In generale il denominatore D(s) avrà poli reali distinti, poli reali coincidenti, poli complessi
coniugati. In relazione ad essi si introdurranno delle metodologie per la
determinazione delle funzioni elementari la cui somma deve riportare alla
funzione F (s) di partenza.
F (s) = Qn
i=1 (s
B.6.1
+ pi )
N (s)
2
2
k=1 (s + 2ω0k hs + ω0 k )
Qm
(B.13)
Poli reali distinti
Se la funzione F (s) ha n poli reali distinti, si dovranno considerare n funzioni
razionali espresse dalla sommatoria
n
X Ai
N (s)
≡
,
s + pi
i=1 (s + pi )
i=1
F (s) = Qn
(B.14)
in cui le n costanti Ai devono essere determinate imponendo che la somma
delle funzioni introdotte possa ricondurre al polinomio N (s) della funzione
F (s), ovvero sia soddisfatta l’indentità B.14. È possibile dimostrare che
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo
131
APPENDICE B. TRASFORMATA DI LAPLACE
uguagliando i coefficienti della stessa potenza in s dei due numeratori si
otterranno n equazioni indipendenti che permettono il calcolo dei coefficienti
Ai .
B.6.2
Poli complessi coniugati
Nel caso in cui siano presenti dei poli complessi coniugati, si dovranno
considerare m funzioni razionali espresse dalla sommatoria
m
X
Ak s + Bk
N (s)
≡
,
2
2 + 2ω hs + ω 2 )
2
(s
(s
+
2ω
hs
+
ω
)
0k
0k
0k
0
k=1
k
F (s) = Qm
(B.15)
k=1
in cui le costanti Ak e Bk devono essere determinate imponendo che la
somma delle funzioni introdotte possa ricondurre al polinomio N (s) della
funzione F (s).
appunti delle lezioni - Sistemi Meccatronici - 2009/2010
prof. Paolo Righettini - Università di Bergamo