IL PENDOLO E LA MISURA DI g
16 maggio 2016
1
Il pendolo semplice
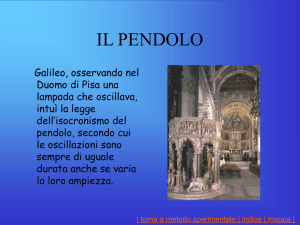
Il pendolo semplice consiste in una massa puntiforme m in un campo di gravità ~g
vincolata a percorrere una traiettoria circolare di un determinato raggio l. Il vincolo
tradizionalmente è realizzato mediante un filo inestensibile come indicato in figura 1.
Moto di un pendolo semplice in assenza di forze dissipative. Per trovare l’equazione del moto del pendolo semplice quando le forze dissipative possono essere trascurate,
possiamo utilizzare la conservazione dell’energia meccanica del sistema. Riferendoci alla
figura 1, supponiamo che all’istante iniziale la massa m si trovi nella posizione angolare
θ = θo e che abbia velocità nulla. La conservazione dell’energia meccanica della massa
m si scrive:
1
mv 2 + mgh = mgh0
(1)
2
dove v è la velocità della massa m e h la sua “quota” come indicato nella figura 1. Usando
θo
l
ho
m~g
Figura 1: Pendolo semplice
la coordinata angolare θ per individuare la posizione della massa m e osservando che h
è legata a θ dalla relazione h = l(1 − cos θ) e che 1 − cos θ = 2 sin2 θ/2 la (1) si scrive:
1 2
θo
θ
lθ̇ = 2g(sin2
− sin2 )
2
2
2
1
Isolando θ̇2
g
θo
θ
θ̇2 = 4 (sin2
− sin2 )
l
2
2
(2)
Piccole oscillazioni. Se θo è sufficientemente piccolo da potere confondere il seno
dell’angolo con l’angolo1 , poiché è |θ| < |θo |, la (2) si riduce a:
θ̇2 =
g 2
(θ − θ2 )
l o
(3)
Si osservi che differenziando la (3) rispetto al tempo si ottiene la notapequazione che
descrive il moto armonico: θ̈ = −(g/l)θ, la cui soluzione è θ(t) = θo sin( g/lt).
La (3) permette di calcolare in modo relativamente semplice il periodo del moto armonico. Esprimendo la derivata dell’angolo rispetto al tempo come rapporto di differenziali
si ha:
s
l
dθ
p
dt =
(4)
2
g θo − θ 2
Integrando nel tempo la relazione precedente da t = 0 a t = To /4, avendo indicato con
To il periodo delle piccole oscillazioni, potremo scrivere:
s Z
s
Z To /4
dθ
To
l θo
lπ
p
=
dt =
=
2
2
4
g
g
2
θo − θ
0
0
Da cui infine:
s
To = 2π
l
g
(5)
Grandi oscillazioni. Calcoliamo ora il periodo T delle oscillazioni quando l’approssimazione delle piccole oscillazione non è valida. Prendiamo in considerazione la (2) e
ripetiamo il procedimento che ha portato alla (4). Utilizzando la posizione (5), potremo
scrivere:
Z
dθ
2 θo
r
T = To
(6)
π 0
2 θo
2 θ
sin
− sin
2
2
L’integrale in questa relazione non è esprimibile in termini di funzioni elementari ed
è classificato come un integrale ellittico di prima specie. Introducendo la variabile ψ
definita come sin ψ = sin2 θ/2 sin2 θo /2, l’integrale (6) prende la sua forma canonica e
ammette lo sviluppo in serie di sin2 θo /2:
Z
2 π/2
dψ
1
θo
9
θo
θo
r
T = To
= To 1 + sin2
+
sin4
+ O(sin6 )
π 0
4
2
64
2
2
θo
1 − sin2 sin2 ψ
2
(7)
1
Lo sviluppo in serie di Laurent di sin2 θ/2 è dato da θ2 /4 + O(θ4 )
2
l’ultima espressione è lo sviluppo in serie dell’integrale arrestato al sesto ordine in
sin θo /2. La (7) mostra che le oscillazioni del pendolo non sono isocrone se non nel
limite θo → 0 e in questo limite il periodo vale To come definito nella (5). Nella tabella
1 sono riportati i fattori correttivi da applicare a To in funzione dell’ampiezza massima
delle oscillazioni del pendolo.
Tabella 1: Tabella dei fattori correttivi per oscillazioni non isocrone del pendolo
θo
4◦
6◦
8◦
10◦
12◦
T − To
3.0 10−4 6.9 10−4 1.2 10−3 1.9 10−3 2.7 10−3
To
θo
T − To
To
14◦
16◦
18◦
20◦
22◦
3.7 10−3
4.9 10−3
6.2 10−3
7.7 10−3
7.7 10−3
Nella figura 1 è mostrato l’andamento del rapporto tra periodo delle oscillazioni di
ampiezza θ con il periodo delle oscillazioni isocrone.
3
2
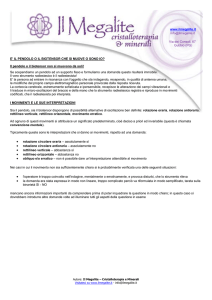
Pendolo fisico o composto
Il pendolo fisico o composto è un corpo esteso di massa m che può essere considerato
come un corpo rigido vincolato a ruotare attorno ad un asse fisso. Il pendolo è un
dispositivo che permette una misura molto accurata dell’accelerazione locale di gravità.
Per raggiungere questo scopo è necessario descrivere nel dettaglio la fisica del pendolo
composto. La figura 2 mostra in modo schematico un pendolo composto dove G indica
la posizione del centro di massa, O il punto in cui passa l’asse di rotazione, l la distanza
tra O e G e l’angolo θ è quello tra il segmento OG e la verticale.
Equazione del moto. La conservazione dell’energia meccanica applicata al sistema
costituito dal pendolo composto, si scrive:
1 2
θo
θ
I θ̇ = 2mgl(sin2
− sin2 )
2
2
2
(8)
dove I è il momento di inerzia del corpo calcolato rispetto all’asse di rotazione 0. Si
O
l θ
λ
G
m~g
Figura 2: Pendolo composto
noti che il termine di energia potenziale ha la stessa espressione di quello per il pendolo
semplice.
Lunghezza ridotta o equivalente. Confrontando l’equazione (8) con la (2), precedentemente trovata per il pendolo semplice, si osserva che definendo la quantità
Leq =
I
ml
(9)
detta lunghezza ridotta o equivalente del pendolo e inserendola nella (8), le due equazioni
sono formalmente identiche:
θ̇2 = 4
g
θo
θ
(sin2
− sin2 )
Leq
2
2
4
(10)
Ne segue che tutti i risultati ottenuti dal modello matematico del pendolo semplice si
applicano al pendolo composto. In particolare un pendolo composto di lunghezza ridotta
Leq avrà un periodo di oscillazione pari a quello di un pendolo semplice di lunghezza
reale Leq . Si noti inoltre il moto di un pendolo composto è identico per tutti gli assi di
rotazione paralleli tra loro che hanno la stessa distanza dal centro di massa del pendolo2 .
Questi assi di rotazione individuano una superficie cilindrica di raggio l e di centro G (si
veda la figura 2).
Esaminando la definizione di lunghezza ridotta (9) si vede che esiste un’ulteriore
superficie cilindrica, parallela e concentrica alla prima, ai cui assi compete lo stesso
periodo di oscillazione di quella di raggio l. A questo scopo utilizziamo il teorema di
Steiner per scrivere la (9) come
Leq =
IG + ml2
ml
(11)
dove IG è il momento di inerzia del pendolo composto attorno al suo centro di massa.
Che debbano esistere due valori della distanza dal centro di massa a cui compete lo
stesso periodo di oscillazione è evidente anche dallo studio della dipendenza di T da l
che con l’uso della (11) si esprime come:
s
IG + ml2
T = 2π
(12)
mgl
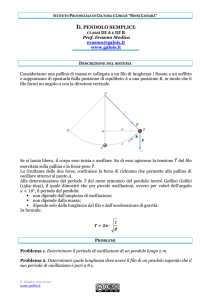
Nella figura 3 è riportato l’andamento qualitativo di questa funzione. Dalla figura 3
Periodo delle piole oslazioni (u.a.)
2.2
2.0
1.8
1.6
1.4
1.2
1.0
0.0
0.2
0.4
0.6
0.8
1.0
Distanza dal entro di massa
dell'asse rotazione (u.a)
Figura 3: Andamento del periodo di oscillazione del pendolo composto in funzione della distanza
del punto di sospensione dal centro di massa.
2
Il momento di inerzia del corpo attorno a questi assi è lo stesso per i teorema di Steiner.
5
si osserva che per ogni fissato l, a cui compete un periodo T , esiste un valore λ della
distanza dal centro di massa con lo stesso periodo. Si può quindi scrivere:
IG + mλ2
IG + ml2
=
mλ
ml
ovvero
IG (λ − l) = mλl(λ − l)
(13)
Questa equazione oltre alla soluzione banale λ = l, ammette la soluzione
λ=
IG
ml
(14)
che individua la superficie cilindrica cercata coniugata con quella di raggio l. La relazione
(14) permette di ottenere la relazione seguente
λ=
IG
IG + ml2
IG
=
+l−l =
− l = Leq − l
ml
ml
ml
ovvero: λ + l = Leq
(15)
La relazione (15) è molto importante in quanto permette di esprimere come somma di
due lunghezze λ e l la grandezza Leq nella cui definizione (9) compare il momento di
inerzia, grandezza difficile da valutare. La valutazione di g si baserà quindi sulla ricerca
di due assi di rotazione nel pendolo composto, con distanze differenti dal centro di massa
(λ 6= l), cui competa lo stesso periodo di piccole oscillazioni. Se i tre punti definiti dagli
assi di rotazione e il centro di massa sono allineati, come succede se il pendolo composto
è simmetrico, basterà misurare la distanza tra gli assi di rotazione e si otterrà Leq = λ+l;
la misura del periodo T permetterà di ricavare g dalla relazione
s
s
Leq
λ+l
T = 2π
= 2π
g
g
3
Misura di g
Il pendolo composto disponibile in laboratorio consiste in una sbarra metallica lungo
la quale possono scorrere due coltelli attorno ai quali il pendolo può essere messo in
oscillazione. La posizione dei coltelli può essere misurata da una scala graduata in
millimetri (se presente, altrimenti con una fettuccia metrica per una prima valutazione
e con un calibro di grande dimensione per una misura più accurata). La variazione della
posizione dei coltelli provoca una variazione di momento di inerzia e quindi di periodo
di oscillazione dell’ordine di 10−4 e inizialmente potrà essere trascurata3 . la procedura
da seguire per la misura di g è la seguente:
3
Il conto è stato fatto supponendo che la massa dei coltelli fosse di 0.1kg e che la massa del pendolo
fosse di 7kg.
6
1. si fissa un coltello (C1 vedi la figura) in una posizione quanto più possibile lontana dal c.m. (dare una giustificazione). La
posizione di questo coltello non varierà più.
C1
2. si misura il periodo di oscillazione TC1 (per questo primo
risultato non è necessaria una grande accuratezza)
3. si gira il pendolo e si misura il periodo di oscillazione in funzione della posizione del coltello C2 . ottenendo un grafico come
quello di figura 5
C2
4. si misura con maggiore accuratezza la relazione tra il periodo
e la posizione del coltello C2 in modo da ottenere valori prossimi a
TC1 che permettano una interpolazione lineare della posizione cercata (si cerchino posizioni in cui TC1 sia approssimato per eccesso
e per difetto).
5.
si posiziona il coltello C2 nel punto che corrisponde al periodo TC1
6.
si gira nuovamente il pendolo e si misura con maggiore accuratezza il periodo TC1
7. si calcola infine il valore della distanza tra i due coltelli da inserire nella relazione
da cui si ottiene g.
La simmetria costruttiva di questo pendolo composto implica che il suo centro di
massa giaccia, con ottima approssimazione, sulla congiungente i due coltelli.
4
Sistematiche nella misura di g
Gli effetti sistematici che sono presenti nelle misurazioni di dell’accelerazione di gravità
sono sia legati all’osservazione, spesso trascurata, che g è una grandezza la cui definizione
è data in modo ambiguo sia a sistematiche intrinseche del metodo di misurazione. Le
principali cause che influenzano il valore di g sono (valutazione qualitativa)
• l’accelerazione di gravità dipende dalla latitudine a causa della forza centrifuga
provocata dalla rotazione terrestre
• la forma della terra, un geode irregolare e non una sfera, influenza localmente il
valore di g
• la densità locale del suolo nei pressi della misurazione influenza il valore di g
7
• a causa dell’andamento 1/r2 della forza gravitazionale, g dipende la quota in cui
si effettua la misura
Gli effetti elencati indicano che il valore di g dipende dalla località in cui si effettua la
misura e quindi possono essere trascurati se si affina la definizione di g specificando che
si intende il suo valore locale. Esistono tuttavia delle variabili di influenza responsabili
di fluttuazioni locali del valore di g come l’effetto dell’attrazione gravitazionale dovuta
ai corpi celesti in prossimità della terra (essenzialmente il Sole e la Luna entrambi responsabili delle maree terrestri). Si calcola che la variazione dovuta al Sole e alla Luna
sia dell’ordine di 3 × 10−7 ms−2 ed è spesso trascurabile.
Agli effetti che influenzano il valore di g vanno aggiunti gli effetti sistematici dovuti
al misurazione del moto del pendolo; tra questi
• le oscillazioni del pendolo sono isocrone solo nel limite di angolo di oscillazione
nullo. Quindi, se è il caso, si deve utilizzare la (7) per la correzione.
• l’asse di rotazione del pendolo non è perfettamente orizzontale. Si calcoli, come
esercizio, la variazione di g generata da un asse di rotazione che formi un angolo
φ non nullo con il piano orizzontale.
• effetto della spinta di archimede sul pendolo
• la rotazione del pendolo non avviene attorno ad un punto ma è un rotolamento
della superficie cilindrica che approssima la lama di appoggio.
5
Misurazione del momento di inerzia del pendolo fisico
Una misura del momento di inerzia di un pendolo fisico può essere ottenuta dallo studio dell’andamento del periodo di oscillazione del pendolo in funzione della coordinata
dell’asse di oscillazione. E’ utile,
p per semplificare la notazione, fare uso del raggio di
girazione del pendolo: rg = I/m. Il raggio di girazione, come si deduce dalla sua
definizione, è il raggio di una superficie cilindrica in cui è concentrata tutta la massa del
pendolo e quindi con lo stesso momento di inerzia del pendolo. Sia x un asse con origine
arbitraria lungo il pendolo e sia xG la coordinata del centro di massa del pendolo. Con
queste posizioni la (12) si scrive:
s
s
IG + m(xg − xG )2
(xg − xG )2 + (x − xG )2
T (x) = 2π
= 2π
(16)
gm(x − xG )
g(x − xG )
Sviluppando T (x) in serie di x attorno a x = xg e troncando al secondo ordine, si ha:
s
2(xg − xG )
(x − xg )2
(x − xg )2
T (x) ' 2π
1+
= Tmin 1 +
(17)
g
4(xg − xG )2
4(xg − xG )2
Tmin è il periodo minimo del pendolo che si ottiene quando il pendolo ha lunghezza
equivalente pari al raggio di girazione. Le relazioni ottenute permettonono di ottenere
8
C1
0
C2
Scala millimetrata
x
Figura 4: Coordinata del coltello C1
5.0
T (s)
4.0
3.0
Zona del minimo
2.0
1.0
0.0
0.000
0.050
0.100
0.150
0.200
0.250
0.300
0.350
0.400
x (m)
Figura 5: Misurazione di T vs x
una procedura per stimare i parametri che compaiono nelle (16) e (17). Tralasciando
la valutazione di g, che sarà stimata con la procedura del pendolo reversibile, vediamo
come si possano stimare xg coordinata del raggio di girazione e xG coordinata del centro
di massa del pendolo. Un primo studio da eseguire riguarda l’andamento del periodo
in funzione della posizione del coltello C1 come mostrato nella figura 5, con lo scopo di
individuare la zona dei valori di x in cui T ha il minimo. In questa zona si devono infittire
le misurazioni per ottenere un grafico del tipo mostrato nella figura 6. In questo intervallo
di x è valida l’approssimazione del periodo T data dalla (17), e dai dati attraverso un
fit quadratico
T = a + bx + cx2
si ottengono il valori di a, b e c. E’ facile verificare che:
xg =
b
2c
Indicando con Tmin il periodo minimo misurato, che vale 2π
r
xG = xg +
9
Tmin
4c
p
2(xg − xg )/g, si ottiene:
1.2764
1.2762
1.2760
T (s)
1.2758
1.2756
1.2754
1.2752
1.2750
1.2748
0.135
0.140
0.145
0.150
0.155
0.160
x (m)
Figura 6: Misurazione di T vs x
Si deduce quindi che il raggio di girazione rg cercato è dato da:
r
Tmin
rg = xG − xg =
4c
Dalla misurazione della massa m del pendolo si ricava il momento di inerzia del pendolo
come
I = mrg2
10
6
Minimi quadrati per una curva del secondo ordine
Si vuole adattare ai dati sperimentali xi , yi ± ui , i = 1, . . . , n una funzione del secondo
ordine:
y = a + bx + cx2
con il metodo dei minimi quadrati. L’espressione da minimizzare è:
R=
n
X
wi (a + bxi + cx2i − yi )2
i=1
dove wi = 1/u2i . Il sistema a cui si arriva facilmente è:
X
X
X
X
a
wi + b
wi x i + c
wi x2i =
wi yi
X
X
X
X
a
wi x i + b
wi x2i + c
wi x3i =
wi xi yi
X
X
X
X
a
wi x2i + b
wi x3i + c
wi x4i =
wi x2i yi
I valori dei coefficienti a, b e c si ottengono risolvendo questo sistema. Si dimostra inoltre
che la matrice inversa dei coefficienti a, b e c:
P
P
P
wi
wi x i
wi x2i
P
P
P
wi x i
wi x2i
wi x3i
P
P
P
2
3
4
wi x i
wi x i
wi x i
è la matrice di covarianza dei parametri stimati. Formalmente si può scrivere:
P
wi
P
wi xi
P
wi x2i
−1
P
P
P
wi x i
wi x2i
wi x3i
P
P
P
2
3
4
wi xi
wi x i
wi x i
Cov[a, a] Cov[a, b] Cov[a, c]
=
Cov[b, a]
Cov[b, b]
Cov[c, a]
Cov[c, b]
Cov[b, c]
Cov[c, c]
Quindi gli elementi diagonali della matrice di covarianza sono la varianza dei parametri, tuttavia i termini non diagonali molto spesso non sono trascurabili; in altre parole
i valori dei parametri sono fortemente correlati. L’espressione esplicita di questa matrice
è piuttosto involuta a causa dei molti termini che la compongono.
11