Appunti di Fisica 2
Fabio Durastante
E-mail address, F. Durastante: [email protected],
URL: http://www.cirdan.it
La fisica è decisamente troppo difficile per i fisici. (David Hilbert)
Sommario. Appunti di fisica 2 raccoglie gli appunti delle lezioni di un
corso di elettromagnetismo ed ottica.
Indice
Capitolo 1. Elettromagnetismo: il caso stazionario
1. Elettrostatica
2. Magnetostatica
3. Prime conclusioni
4. Le equazioni di Maxwell per il caso stazionario
5. Alcune Distribuzioni di Cariche e Correnti
6. Campo generato da una distribuzione arbitraria di cariche
7. Interazioni tra campi e cariche
8. Generare un campo elettrico
1
1
2
3
3
8
14
20
24
Capitolo 2. Elettromagnetismo: il caso non stazionario
1. La soluzione delle eq. di Maxwell: l’equazione delle onde
2. Onde elettromagnetiche
29
33
40
Capitolo 3. Elettromagnetismo in presenza di materiali
1. Carica di un conduttore
2. Magnetizzazione, elettrizzazione e polarizzazione della materia
3. Le Correnti
4. Potenziali Ritardati e Antenne
43
44
50
60
78
Capitolo 4. Ottica
1. Rifrazione e Riflessione
2. Interferenza e Diffrazione
87
88
91
iii
CAPITOLO 1
Elettromagnetismo: il caso stazionario
Cominciamo col definire le distribuzioni di cariche e di correnti, le cui
mutue relazioni saranno l’oggetto di studio dell’elettromagnetismo. Per farlo
consideriamo un dominio D dello spazio, indicizzato da coordinate d3 x e di
volume ∆V , occupato da un sistema di cariche ∆Q:
Definizione 0.1. Definiamo densità di carica la funzione limite:
(0.1)
lim
∆V →0
dq
∆Q
= ρ(x, y, z, t) = 3
∆V
d x
Necessario prestare attenzione ad alcune caratteristiche di questa funzione, è, come esplicitamente scritto, dipendente dal punto e dal tempo. Per
quanto riguarda il tempo la dipendenza è macroscopica. Per quanto riguarda
il punto, la seguente funzione è zero quasi ovunque, si verifica essere diversa
da zero solo nei punti realmente occupati da una carica.
Supponiamo, a questo punto, di far muovere il dominio nello spazio con
una velocità v, definiamo:
Definizione 0.2. Densità di corrente elettrica (funzione del punto)
(0.2)
j = ρv
Se per andare da una posizione A → B dello spazio la densità di carica ρ
attraversa una superficie S ha senso definire il flusso del vettore j attraverso
S:
Definizione 0.3. Intensità di corrente attraverso la superficie S:
Z
(0.3)
i=
j · nd2 x
S
1. Elettrostatica
Possiamo a questo punto introdurre le Leggi di Coulumb per l’elettrostatica: due cariche puntiformi e a simmetria sferica q e q 0 rispettivamente
nelle posizioni r e r0 , nel vuoto, rispetto ad un sistema di riferimento fissato
interagiscono con una forza:
(1.1)
Fc = −
1
r0 − r
qq 0
4πε0 |r − r0 |2 |r0 − r|
La presenza del segno ”−” nella formula è dovuta alla regola empirica dell’attrattività della forza in caso di cariche differenti, repulsività in caso di
cariche omologhe.
1
2
1. ELETTROMAGNETISMO: IL CASO STAZIONARIO
Analogie e differenze con la legge di Newton. Per quanto riguarda
le analogie, abbiamo, a colpo d’occhio, una dipendenza lineare nelle sorgenti
di carica, una dipende legata all’inverso del quadrato della distanza. Mentre
per le leggi di Newton si tende a fissare l’origine del campo di forze nella
massa ”grande”, quelle di Coulumb sono sostanzialmente indipendenti dalla
scelta del sistema di riferimento. In ambedue i casi resta il problema classico
delle azioni a distanza.
Come si è soliti fare in meccanica, è conveniente introdurre il concetto
di campo elettrico generato da una carica, per farlo manipoliamo nel
seguente modo l’espressione della Forza di Coulumb.
1
qq 0 \0
1
q0
0
\
(1.2) F c = −
r−r =q −
r − r = qE(r)
4πε0 |r − r0 |2
4πε0 |r − r0 |2
Abbiamo quindi posto la seguente definizione:
Definizione 1.1. Si definisce vettore campo elettrico (funzione vettoriale
della posizione):
(1.3)
E(r) = −
1
q0
r\
− r0
4πε0 |r − r0 |2
Avendo introdotto un buon numero di concetti è opportuno dare le
definizioni delle loro unità di misura. In primo luogo l’unità di misura della carica, che possiamo ottenere invertendo la relazione data dalla Legge di
Coulumb, è [q] = [mlt−2 l2 ]1/2 , utilizzata ancora nel sistema cgs(elettrostatico),
tuttavia per i nostri fini è utile introdurre una nuova grandezza fondamentale
per la carica elettrica:
Definizione 1.2. 1 Coulumb = 1C = ӏ il valore di quella carica che posta
a distanza di 1 metro da una carica eguale genera una forza risultante uguale
a 9 · 109 N ”
Questo fissa un valore ed unità di misura per ε0 = 8.8·10−12 F/m (Farad1
a Metro) che è detta costante dielettrica del vuoto, nel sistema MKSQ.
Questa definizione, tuttavia, non è un granché, piuttosto scomoda sia come
dimensione che come misurazione, in genere si preferisce introdurre un’unità fondamentale per l’intensità di carica i detta Ampere (A) e definire
1C = 1A/1s (in un conduttore2). Per quanto detto fino ad ora il vettore
campo elettrico E(r) si dovrebbe misurare in N/C, tuttavia si preferisce usare l’unità di misura V /m, Volt su metro, ove il Volt rappresenta la quantità
di energia per unità di carica, cioè V = J/C (Joule su Coulumb).
2. Magnetostatica
Per parlare di campo magnetico, cominciamo con l’introdurre la Forza
di Lorentz, cioè la forza che un campo magnetico esercita su una carica in
moto:
(2.1)
F L = q(v × B)
1Per la definizione dell’unità di misura Farad si veda più avanti.
2Anche il senso di questa parola sarà meglio specificato in seguito.
4. LE EQUAZIONI DI MAXWELL PER IL CASO STAZIONARIO
3
La prima cosa che osserviamo della Forza di Lorentz è che questa risulta
essere puramente deviatrice, ovvero non compie lavoro, poiché ⊥ v, abbiamo inoltre introdotto il simbolo B che chiamiamo vettore di induzione
magnetica, per ora ci limitiamo a definire in modo empirico come la modellizzazione della proprietà emanata da una calamità, per quanto riguarda le
sue dimensione si ha: [B] = V · s/m2 = Weber /m2 = 1 Tesla = 104 Gauss.
Per quanto riguarda la sua espressione analitica, ci lavoreremo nel seguito.
3. Prime conclusioni
Tutte le espressioni di forze viste sino a questo momento sono lineari
nelle cariche, questo sia in quelle che generano l’effetto, sia in quelle che
lo subiscono. Questo ci porta a dire che l’interazione elettromagnetica può
essere schematizzata come riguardante solo due cariche alla volta, facendo
uso di quello che è noto come principio di sovrapposizione, possiamo
dunque scrivere:
!
m
m
X
X
E i (r) + v × B i = q(E+v×B)
(3.1) F (r) =
F c (r)+q(v×B i ) = q
i=1
i=1
Mentre per quanto riguarda una distribuzione di cariche ρ avremmo che:
dF
= ρE + ρv × B = ρE + j × B
d3 x
Abbiamo quindi ottenuto una forza complessiva generata in parte dalla distribuzione di cariche statiche e in parte dalla distribuzione delle cariche in
moto. La teoria elettrica e magnetica costruita sin qui presenta, tuttavia,
una serie di gravi problemi, dovuti, sostanzialmente, alla trattazione slegata dei due fenomeni. Si pensi, ad esempio, alla distinzione appena fatta
tra cariche ”ferme” e cariche ”in moto”, che succede se cambio sistema di
riferimento?
(3.2)
4. Le equazioni di Maxwell per il caso stazionario
Quello che ci proponiamo di fare ora è risolvere i problemi sollevatisi nella
trattazione separata dei due fenomeni riunificandoli, per farlo arriveremo a
produrre quelle che sono detto Equazioni di Maxwell per il caso stazionario.
Per farlo torniamo all’intensità di corrente attraverso una superficie S, avevamo definito:
Z
(4.1)
i=
j · n̂d2 x con j = ρv
S
Introduciamo a questo punto, in analogia a quanto si fa nella meccanica
dei fluidi, l’intensità di vortice per un generico campo vettoriale F , come
la circuitazione del campo in una regione di spazio, lungo una certa linea
chiusa C come:
I
(4.2)
dIv =
F dr = (∇ × F )d2 x
C
per fare dunque la seguente identificazione:
(4.3)
dIv = j v d2 x
4
1. ELETTROMAGNETISMO: IL CASO STAZIONARIO
Ovvero, abbiamo scoperto che la rotazione del campo misura l’intensità di
corrente che produce i vortici, cioè:
(4.4)
(4.5)
∇ · F = ρ(r, t)
∇ × F = j(r, t)
Le superfici ortogonali alle linee di campo sono date dalle soluzioni dell’eq.
differenziale F · dr = 0 ovvero ∃U (x, y, z) e µ(x, y, z) tali che F = µ∇U , ove
µ è detto fattore integrante e U è una funzione della posizione. Nel caso
in cui risultasse ∇ × F = 0 si avrebbe che µ è una semplice costante.
Consideriamo ora un campo F 1 per cui ∇×F1 = 0, questo implica che
non ci sono linee di campo chiuse, cioè il campo si dice irrotazionale,
ovvero:
Z B
Z B
F dr =
F dr
(4.6)
∇×F = 0 ⇒
A,C
A
Dunque esiste per questo campo una funzione scalare ϕ tale che:
(4.7)
F 1 = −∇ϕ
che in modo costruttivo può essere ottenuta come:
Z O
(4.8)
ϕ(P ) =
F 1 · dr
P
Osserviamo che cambiare il punto O con un punto 00 costruisce solo dei
potenziali che differiscono per una costante λ, ovvero ϕ0 = ϕ+λ, osserviamo
che λ è una costante per le coordinante, ma non è detto che sia un’invariante
per il tempo. Consideriamo ora un campo F 2 per cui ∇·F 2 = 0, questo
è un campo le cui linee sono chiuse, ma non si intersecano mai, oppure
sono linee che procedono da −∞ a +∞ senza intersecarsi mai. Il campo
si dice solenoidale e possiamo costruire un potenziale vettore A per cui
F 2 = ∇×A. Come al caso precedente in generale il potenziale vettore non
è unico, esiste un’infinità di potenziali A0 = A + ∇ψ(x, y, z, t). Abbiamo
ottenuto le due seguenti relazioni, che sono dette Condizioni di Gauge
per i campi F1 e F2 :
0
A = A + ∇ψ(x, y, z, t)
(4.9)
ϕ0 = ϕ + λ(t)
Introduciamo a questo punto un risultato generale di Analisi che ci permetterà di ottenere le Equazioni di Maxwell:
Teorema 4.1 (Helmoltz). Ogni campo vettoriale F può essere decomposto
in due campi vettoriali, uno solenoidale e l’altro irrotazionale in infiniti modi.
Cioè dato un campo generico F possiamo scriverlo come F = F 1 + F 2
con F 1 ed F 2 costruiti come al passo precedente, questo ci permette di
costruire le seguenti due equazioni per il generico campo F :
∇·F = ρ
∇·F 2 = 0
(4.10)
=
∇×F = j
∇×F 1 = 0
Da cui possiamo estrarre le equazioni per i potenziali, ovvero:
(4.11)
∇·F 1 = ρ ⇔ ∇(−∇ϕ) = ρ ⇔ ∇2 ϕ = −ρ
(4.12)
∇×F 2 = j ⇔ ∇×(∇×A) = j ⇔ ∇(∇·A) − ∇2 A = j
4. LE EQUAZIONI DI MAXWELL PER IL CASO STAZIONARIO
5
cioè:
(4.13)
∇2 φ = −ρ
⇐⇒
∇2 A − ∇(∇·A) = −j
∇2 φ = −ρ
∇2 A = −j
avendo cura di scegliere la Gauge opportuna, ovvero, la Gauge di Coulumb,
ovvero ∇·A = 0. Un primo risultato che si ricava dalle equazioni dei potenziali è l’invarianza relativistica della carica, ovvero, il valore della carica
elettrica non dipende dalla velocità a cui questa si muove. Osserviamo, inoltre, che possiamo considerare le coppie (A, ϕ) e −(j, ρ) come vettore dello
spazio tempo, quadrivettori, ovvero possiamo considerare un’unica entità
(A, ϕ) detta quadripotenziale. Un altro risultato immediato è legato alla
conservazione locale della carica. Immaginiamo di avere una quantità
di carica Q all’interno di una superficie S, dopo un tempo ∆t la quantità di
carica Q dentro la superficie è diminuita di Q0 , cioè dentro S c’è una carica
di Q − Q0 , ovvero:
Z
Z
d
dQ
∂ρ 3
=−
ρd3 x = −
d x
(4.14)
−
dt
dt D
D ∂t
avendo supposto che D, dominio di spazio contenuto dentro S, non vari col
tempo. Ora, poiché la S è una superficie chiusa, possiamo anche scrivere:
Z
Z
dQ
=i=
j · n̂d2 x =
∇·jd3 x
(4.15)
−
dt
S
D
Mettendo insieme questi due risultati si ottiene:
Z ∂ρ 3
(4.16)
∇·j +
d x = 0 ∀ D dominio arbitrario
∂t
D
Ovvero:
• La corrente nasce da una variazione della distribuzione delle cariche:
∂ρ
(4.17)
−
= ∇·j
∂t
• Valida l’equazione di continuità per la carica:
∂ρ
+ ∇·j = 0
∂t
Possiamo a questo punto enunciare le Equazioni di Maxwell:
(4.18)
Teorema 4.2 (Equazioni di Maxwell - Stazionario). Detto E il vettore campo elettrico, B il vettore di induzione magnetica, ρ la densità di distribuzione
di carica e j la densità di corrente elettrica:
ρ
∇·E =
ε
0
∇·B = 0
(4.19)
∇×E = 0
∇×B = µ0 j
Che rappresentano la decomposizione alla Helmoltz del campo elettromagnetico, per ottenere quindi le espressioni di E e di B, dobbiamo
prima poter calcolare i loro potenziali ϕ ed A, cioè quelli per cui E = −∇ϕ
6
1. ELETTROMAGNETISMO: IL CASO STAZIONARIO
e B = ∇×A, cioè i due potenziali che soddisfano alla coppia di Equazioni
di Poisson data da:
(
ρ
∇2 φ = −
ε0
(4.20)
∇ 2 A = µ0 j
Prima di risolvere queste equazioni costruiamo un nuovo operatore differenziale che agisce sui quadrivettori, la quadridivergenza, con l’intenzione di
scrivere l’equazione di continuità in quattro dimensioni, ovvero:
Definizione 4.1. Si dice quadridivergenza l’operatore:
1∂
∂
∂
∂
(4.21)
=
,− ,− ,−
c ∂t ∂x ∂y ∂z
Per farlo dobbiamo ancora modificare un’ultima cosa, cioè costruire un
prodotto scalare ad-hoc per lo spazio quadridimensionale, usiamo il prodotto con la segnatura (+, −, −, −) (in analogia a come abbiamo costruito la
quadridivergenza), che presi due quadrivettori a, b agisce nel seguente modo:
a · b := a0 b0 − (a1 b1 + a2 b2 + a3 b3 ), ovvero, è equivalente a fare il prodotto del
primo termine del quadrivettore e sottrargli l’usuale prodotto scalare degli
altri tre. Procediamo alla riscrittura:
1 ∂c
∂ρ
+∇·j = 0 ⇔
ρ+∇·j = 0 ⇔ ()0 ·(j)0 −∇·j = 0 ⇔ · j̇ = 0
(4.22)
∂t
c ∂t
dove j̇ = (cρ, j x , j y , j z ). Abbiamo costruito l’analogo quadridimensionale
della divergenza, che, osserviamo, essere invariante per trasformazioni di
Lorentz, differentemente dalla divergenza.
Procediamo ora a risolvere le equazioni di Poisson, calcoliamo per prima
l’espressione di ϕ, consideriamo una regione di spazio D0 , contenente una
distribuzione di cariche ρ. Dalla legge di Coulumb abbiamo che una quantità
infinitesima di carica ρd3 x0 genera un potenziale nel punto r:
(4.23)
ϕ(r) =
1 ρ(r0 )d3 x0
4πε0 |r − r0 |
Per calcolare il contributo di tutti gli elementi infinitesimi del dominio D0
non resta altro da fare che integrare la quantità del punto precedente su
tutto il dominio, ottenendo:
Z
1
ρ(r0 )d3 x0
(4.24)
ϕ(r) =
4πε0 D0 |r − r0 |
Per analogia 3 otteniamo il seguente risultato per A:
Z
j(r0 )d3 x0
µ0
(4.25)
A(r) =
4π D0 |r − r0 |
ATTENZIONE: i due potenziali ottenuti sono soluzioni delle equazioni di
Poisson a patto di scegliere come condizione al contorno l’annullarsi a +∞
dei medesimi. Si potrebbero ricavare soluzioni più generali.
3Equazioni della stessa forma hanno soluzioni della stessa forma, a patto di cambiare
opportunamente i simboli.
4. LE EQUAZIONI DI MAXWELL PER IL CASO STAZIONARIO
7
Ora che abbiamo le equazioni per i potenziali possiamo facilmente ricavare quelle per i campi, cominciamo dal campo Elettrico, avevamo che
E = −∇ϕ, dunque:
(4.26)
Z
Z
1
r − r0
1
1
0 3 0
ρ(r
∇
ρ(r0 )d3 x0
E(r) = −
)d
x
=
4πε0 D0
|r − r0 |
4πε0 D0 |r − r0 |3
ovvero, separando modulo e versore:
Z
1
ρ(r0 ) \0 3 0
r−rd x
(4.27)
E(r) =
4πε0 D0 |r − r0 |2
Per il vettore di induzione magnetica avevamo B = ∇×A, quindi:
Z
Z
j(r0 )d3 x0
µ0
d3 x0
µ0
0
∇×
j(r
)
×
∇·
B(r) =
=
−
4π D0
|r − r0 |
4π D0
|r − r0 |
!
(4.28)
Z
− r0
µ0
r\
j(r0 ) × −
d3 x0
=−
4π D0
|r − r0 |2
Abbiamo ottenuto, in definitiva, la coppia di equazioni integrali:
Z
1
ρ(r0 ) \0 3 0
=
r−rd x
E(r)
4πε0 D0 |r − r0 |2
!
Z
(4.29)
0
\
−
r
µ
r
0
d3 x0
j(r0 ) × −
B(r) = − 4π
|r − r0 |2
D0
Con queste equazioni in mano possiamo ottenere subito due risultati notevoli:
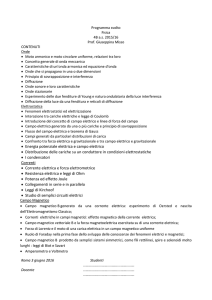
La Formula di Laplace. Campo magnetico generato da correnti contenute in un dominio D finito, generate da un unico ”filo”. In un dl infinites-
Figura 1. La Formula di Laplace
8
1. ELETTROMAGNETISMO: IL CASO STAZIONARIO
imo il tratto di filo γ è un cilindretto di altezza dl e direzione t̂ tangente
al filo stesso (vedi fig. 1), possiamo spezzare, in queste ipotesi, l’integrale
triplo per calcolare B in un integrale doppio, più un’integrale di linea:
I Z
I
µ0
r\
− r0 2
iµ0
dl × r\
− r0
0
(4.30)
j(r ) ×
d
xdl
=
−
B(r) =
4π γ Σ
|r − r0 |2
4π γ |r − r0 |2
dove abbiamo usato il seguente fatto: j × r\
− r0 = (j · n̂) · n̂ × r\
− r0 , ma j
ha componente solo lungo n̂, dunque: j n̂ × r\
− r0 , ovvero portando poi nell’integrale il d2 xdl e riconoscendo che di = j n̂d2 x otteniamo la conclusione.
Abbiamo cosı̀ estratto dall’integrale il valore di i che non dipende più dalla
lunghezza del filo, non ci resta ora che osservare che dl = dr0 , ovvero che
un incremento infinitesimo del filo è un incremento infinitesimo del vettore
posizione r0 nello spazio. Questo ci porta quindi a concludere enunciando la
formula di Laplace:
Z
dr0 × r\
iµ0
− r0
(4.31)
B(r) = −
4π D |r − r0 |2
Altri due risultati possono essere ottenuti applicando semplicemente il
teorema della Divergenza e il teorema di Stokes ai vettori E e B, dal teorema
della Divergenza otteniamo quello che in fisica è chiamato Teorema di
Gauss:
Z
Z
Z
ρ 3
QD
3
(4.32)
∇·Ed x =
d x=
=
E · n̂d2 x = Φ∂D (E)
ε0
D ε0
D
∂D
ovvero:
Teorema 4.3 (Gauss). Il flusso uscente del vettore E da una superficie
chiusa S è uguale alla carica totale contenuta nel dominio D racchiuso nella
superficie S, diviso ε0 , cioè:
(4.33)
ΦS (E) =
QD
ε0
Applicando il Teorema di Stokes al vettore induzione magnetica B si
ottiene, invece, quello che è noto come Teorema di Ampere:
Z
I
Z
2
(4.34)
(∇×B) · n̂d x =
B · dl = (µ0 j) · n̂d2 x = µ0 i
S
C
S
ovvero:
Teorema 4.4 (Ampere). L’integrale lungo una linea chiusa C del vettore
induzione magnetica B è uguale alla somma algebrica delle correnti elettriche
concatenate a C moltiplicata per µ0 , cioè:
Z
X
(4.35)
B · dl = µ0
i
C
5. Alcune Distribuzioni di Cariche e Correnti
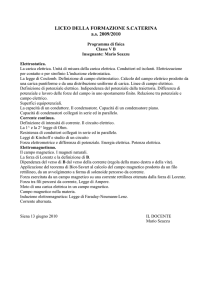
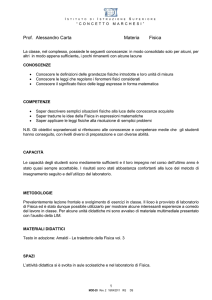
Distribuzione uniforme di carica a simmetria sferica. Supponiamo di avere una sfera uniformemente carica, distribuzione ρ, di raggio R
poggiata su un sostegno isolante. Il nostro obiettivo è quello di descriverne
5. ALCUNE DISTRIBUZIONI DI CARICHE E CORRENTI
9
Figura 2. Sfera Uniformemente Carica
il campo elettrico, per farlo ci sono diverse strade, la più diretta è quella di
risolvere l’integrale multiplo in coordinate sferiche dato da:
Z
1
ρ(r0 ) 3 0
(5.1)
ϕ(r) =
d r
4πε0 Ω |r − r0 |
considerando che la funzione ρ è quella graficata in fig. 2 e che E(r) =
−∇ϕ(r), non è una strada impraticabile, tuttavia l’integrale ci descriverebbe
solo il campo all’esterno della sfera, mentre noi siamo interessati a valutarlo
anche all’interno. Per farlo sfruttiamo il Teorema di Gauss, abbiamo che:
Z
Z
2
(5.2)
E · n̂d x =
ρ(r0 )d3 x0 = QΣ
Σ
Ω
da questa vorremo risalire al valore del campo elettrico E, questo ha senso
dove il campo elettrico è costante, altrimenti otterrei solo valori medi di E
per l’area della superficie (dal teorema della media integrale), ovvero:
Z
E · n̂d2 x = QΣ
(5.3)
<E>S=
Σ
in questo caso Σ è una superficie equipotenziale ortogonale al campo, dunque
posso eliminare la dipendenza tra le direzioni di E e quelle della normale
alla superficie n̂, quindi:
Z
Z
Z
QΣ
2
2
(5.4)
QΣ =
E · n̂d x =
|E|d x = E
d2 x = ES ⇒ E =
S
Σ
Σ
Σ
Poiché la struttura è a simmetria sferica le linee di forza del campo sono
invarianti per rotazioni, dunque E, in coordinate sferiche, è funzione di ρ,
ma non di θ e di φ. Data una superficie equipotenziale di raggio r, abbiamo
che il flusso del campo elettrico attraverso di essa è ΦS (E) = E(r)4πr2 ,
per quanto riguarda la quantità di carica questa è tutta quella contenuta
dentro la sfera di raggio R, quindi QΣ , applichiamo il Teorema di Gauss
come abbiamo fatto sopra otteniamo: ΦS (E) = E(r)4πr2 = QΣ /ε0 , da cui
segue che:
1 Q
(5.5)
E(r > R) =
4πε0 r2
La simmetria sferica si mantiene anche all’interno della sfera di raggio R,
dunque se il campo elettrico fosse presente all’interno della sfera, dovrebbe
10
1. ELETTROMAGNETISMO: IL CASO STAZIONARIO
ancora essere a simmetria radiale. Spostiamo la superficie di raggio r ad un
valore r < R, ora possiamo scrivere:
Z
Z
1
Q
Q4 3
(5.6)
Φ0S (E) = E(r)4πr2 =
ρ(r0 )d3 x0 =
d3 x0 =
πr
ε0 Ω0
ε0 Ω0
ε0 3
Abbiamo quindi ottenuto un valore per il campo elettrico di:
1 Qr
(5.7)
E(r) =
4πε0 R3
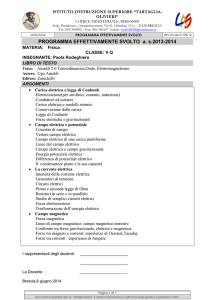
una funzione lineare di r. Abbiamo ottenuto complessivamente una funzione
continua per il campo elettrico, si veda la figura 3.
Figura 3. Campo Elettrico di una sfera uniformemente carica
Filo Indefinito Uniformemente Carico Anche in questo caso siamo
interessati al campo elettrico generato da questa distribuzione di carica. Per
calcolarlo eviteremo di nuovo di usare la strada del calcolo diretto dell’integrale del potenziale per appoggiarci di nuovo al Teorema di Gauss. Il campo
dovrà essere invariante per rotazioni attorno all’asse del filo, dunque ogni
linea di campo sarà ortogonale all’asse. Questo ci suggerisce di fissare un
sistema di riferimento cilindrico e di procedere similmente a quanto fatto
con la sfera attraverso il Teorema di Gauss.
Ponendoci nella situazione illustrata dalla figura 4, abbiamo che:
QS
(5.8)
ΦS (E) = E(r)2πrh =
ε0
Esplicitiamo QS come:
Z
Z
(5.9)
QS =
ρd3 x = ρ d3 x = ρπa2 h = λh
Ω
Ω
2
ρπa , chiamiamo λ
Avendo posto λ :=
densità di carica lineare, ovvero
dQ/dl. Abbiamo ottenuto per il campo elettrico:
1 λ
2πε0 r
osserviamo che il campo elettrico del filo decresce più lentamente di quello
della sfera, ed, inoltre, che questa funzione non è sommabile, allora come ne
definisco il potenziale? L’unica soluzione è metterne lo 0 in corrispondenza
della superficie del filo, nelle nostre coordinate:
Z a
a
λ
(5.11)
ϕ(r) =
Edl =
ln
2πε0
r
r
(5.10)
E(r > a) =
5. ALCUNE DISTRIBUZIONI DI CARICHE E CORRENTI
11
Figura 4. Campo Elettrico di un Filo Indefinito Uniformemente Carico
In effetti questo ha senso, l’indefinitezza del filo fa si che io abbia cariche
a +∞, dunque lı̀ il potenziale è ragionevole che non sia zero. Come avevamo osservato risolvendo le equazioni per i potenziali, in quel caso avevamo
posto come condizione al contorno l’annullarsi all’infinito del potenziale,
se vogliamo risolverle per ottenere questa soluzione dobbiamo porre come
condizione al contorno ϕ(a) = 0.
Filo Indefinito Percorso da Corrente. Data una densità di corrente
j uniforme che percorre il filo voglio scrivere il vettore di induzione magnetica
B, l’equazione per il potenziale mi dice ∇2 Ai = −µ0 j i per i = x, y, z,
scelgo l’asse del filo parallelo a z, in questo modo Ax = Ay = 0, poiché la
densità di corrente è in queste direzioni nulla. In analogia a quanto fatto
per determinare il campo elettrico:
i
z }| {
j z πa2
r
µ0
i ln
2π
a
2π
a
Possiamo a questo punto calcolare B = ∇×A attraverso il teorema della circuitaizione. B è ortogonale ad r e abbiamo chiamato i la corrente
concatenata, dunque B(r)2πr = µ0 i ovvero:
µ0
(5.13)
B(r) =
i
2πr
Superficie piana indefinita uniformemente carica. Definiamo in
primo luogo una densità di carica superficiale, in analogia a quanto fatto per
il filo e quella lineare, come σ = dQ/d2 x = ρdz, la simmetria del sistema
è, in questo caso, traslatoria per vettori paralleli all’asse ẑ e per rotazioni
attorno al medesimo asse dunque le linee di forza sono entranti o uscenti in
maniera ortogonale alla lastra. Fissiamo un parallelepipedo che attraversa
(5.12)
Az (r) = µ0
ln
r
=
12
1. ELETTROMAGNETISMO: IL CASO STAZIONARIO
Figura 5. Superficie Piana Indefinita Uniformemente Carica
la lastra con due facce ad essa parallela (si veda fig. 5). Calcoliamo a questo
punto:
σ
(5.14)
ΦS (E DS ) = 2E(z)∆x∆y = ∆x∆y
ε0
cioè:
(5.15)
E(z) =
1
σ
2ε0
il campo è dunque costante e non dipende dalla distanza z, idealmente, è
come se le cariche all’infinito si trovassero su un cerchio all’infinito, non
esiste alcune direzione nella quale io possa allontanarmi abbastanza per non
sentire più l’effetto delle cariche.
Campo magnetico prodotto da un filo percorso da corrente.
Facciamo, in primo luogo, un’analisi del variare della carica lungo il filo:
(5.16)
dq = ρd3 x = ρd2 xdl = ρd2 xvdt = ρvd2 xdt = idt
cioè abbiamo che i = dq/dt. Immaginiamo di essere nella situazione della
figura 6, dobbiamo calcolare il contributo al campo di induzione magnetica
Figura 6. Campo magnetico prodotto da un filo percorso da corrente
5. ALCUNE DISTRIBUZIONI DI CARICHE E CORRENTI
13
di tutti i tratti dl di filo nel punto P sull’asse ŷ, per farlo consideriamo che:
(5.17)
dB =
µ0
idl × r̂
r2 =
4π dqv × r̂
r2
cioè, calcolandone l’integrale lungo il circuito:
I
I
idl × r̂
dB =
(5.18)
B(r) =
r2
C
C
per averlo nel punto P sull’asse ŷ riscriviamo:
(5.19)
dB =
µ0 ir sin ϕdl
µ0 r∗3
=
i dz
4π
r3
4π r3
ove |dl × r| = r sin ϕdl e sin ϕ = r∗ /r, abbiamo quindi che:
Z l/2
1
µ0 i
µ0
dz =
(5.20)
B(P ) = B(r∗ ) =
ir∗ 2
f (l)
3/2
2
4π
4π
r∗
(r∗ + z )
−l/2
Campo Magnetico prodotto da una spira circolare Vogliamo calcolare il campo di induzione magnetica B prodotto da una spira circolare
in un punto P = (0, 0, z) sull’asse centrale ẑ della spira stessa. La struttura è quella rappresentata nella figura 7. La prima cosa da osservare è che
B ⊥ ≡ 0 su tutto l’anello poiché per ogni punto per cui viene calcolato c’è da
Figura 7. Campo Magnetico Prodotto da una Spira Circolare
calcolarlo per il punto opposto sulla spira, che da origine ad un contributo
B ⊥ equidiretto, ma di segno opposto. Dunque tutto il campo di induzione
magnetica è diretto lungo l’asse ẑ, procediamo al calcolo:
(5.21)
µ0 dlr
µ0 dl
µ0 dl
µ0
1
dB z =
i
cos(α) =
i cos(α) =
iR =
iR
dl
4π r3
4π r2
4π r3
4π (R2 + z 2 )3/2
14
1. ELETTROMAGNETISMO: IL CASO STAZIONARIO
avendo osservato che |dl × r̂| = dlr e cos α = R/r, possiamo a questo punto
sommare tutti i contributi della spira, integrando su tutto l’angolo:
Z 2π
iR2
µ0
1
µ0
(5.22)
B z (P ) =
iR 2
Rdθ
=
4π (R + z 2 )3/2 0
2 (R2 + z 2 )3/2
Teorema 5.1 (Di Equivalenza di Ampere). Una spira piana si comporta,
ai fini della generazione del campo magnetico, come un aghetto magnetico
con momento di dipolo pari a quello della spira.
Manipolando ancora il vettore di induzione magnetica della spira al
centro, (z = 0), abbiamo:
µ0 iπR2
µ 0 mn
n̂ =
2π R3
2π R3
dove mn = iπR2 n̂ è detto momento di dipolo magnetico.
Campo Magnetico prodotto da un Solenoide per solenoide si intende una bobina di forma cilindrica formata da una serie di spire circolari
molto vicine fra loro e realizzate con un unico filo di materiale conduttore.
Consideriamo un solenoide formato da N spire lungo una lunghezza ∆l. Il
campo magnetico prodotto dal solenoide è la somma dei campi lungo la
stessa direzione generati da tutte le spire, cioè deve essere:
I
(5.24)
B · dl = B z (0)∆l = in∆lµ0
(5.23)
B(0) =
γ
cioè B z (z) = µ0 in.
Definizione 5.1. Chiamiamo H = B/µ0 intensità campo magnetico o
intensità di magnetizzazione, che misuriamo in Ampere,spire,metro.
6. Campo generato da una distribuzione arbitraria di cariche
Abbiamo risolto, fino ad ora, le equazioni di Poisson:
(
ρ
∇2 φ = −
ε0
(6.1)
∇ 2 A = µ0 j
sfruttando, come condizioni al contorno per un dominio D particolare. Abbiamo, cioè, posto D = R4 e obbligato le soluzioni ad essere regolari all’infinito, ovvero ad annullarsi all’infinito. Questo ci ha portato ad ottenere le
due soluzioni, che abbiamo usato per calcolare il campo elettromagnetico
nel paragrafo precedente:
Z
1
ρ(r0 )d3 x0
ϕ(r) =
4πε0 D0 |r − r0 |
Z
(6.2)
j(r0 )d3 x0
µ
A(r) = 0
4π D0 |r − r0 |
Queste soluzioni sono vincolate alla presenza di una funzione, che funge da
fattore integrante, detta Funzione di Green:
1
(6.3)
|r − r0 |
Cenni sul metodo delle funzioni di Green. In generale dato un
operatore differenziale lineare Lx , come il Laplaciano, possiamo costruire
6. CAMPO GENERATO DA UNA DISTRIBUZIONE ARBITRARIA DI CARICHE
15
un’equazione differenziale come Lx U (x) = f (x). Molto spesso questo è
un problema che non siamo in grado di affrontare direttamente. Tuttavia,
fissato un determinato insieme di condizioni al contorno, siamo spesso in
grado di risolvere:
(6.4)
Lx G(x, x0 ) = δ n (x − x0 )
In questo caso possiamo scrivere che:
Z
Z
0 n
0 n 0
f (x) = f (x )δ (x − x )d x = f (x0 )Lx G(x, x0 )dn x0 =
Z
(6.5)
=Lx f (x0 )G(x, x0 )dn x0
ma f (x) = Lx U (x) quindi possiamo scrivere che:
Z
(6.6)
U (x) =
f (x0 )G(x − x0 )dn x0 + q(x)
dove q(x) è una funzione che non altera la soluzione, cioè tale che Lx q(x) = 0.
In generale possiamo quindi scrivere:
Z
(6.7)
U (x) = f (x0 )G0 (x, x0 )dn x0
avendo inglobato la funzione q(x) nella funzione di Green.
Vogliamo ora trattare il caso particolare di tutte le cariche al finito.
Consideriamo come D0 un dominio sferico che contiene tutte le cariche e
le correnti in oggetto. Vogliamo conoscere il campo elettromagnetico nel
generico punto P dello spazio, individuato dalla posizione r, questo sarà la
somma vettoriale di tutti i campi generati dal dominio D0 , cioè la somma di
potenziali ottenuti con le due precedenti soluzioni.
Proviamo a sviluppare la soluzione dei potenziali, integrando lo sviluppo
in serie di potenze della funzione di Green. Questo è legittimo farlo a patto
di porre la condizione che r0 << r, cioè che la distanza del punto P in
cui vogliamo calcolare il campo dal dominio D0 sia molto grande, questo ci
garantisce sia la sviluppabilità in serie che la convergenza della serie stessa
alla funzione:
X
1 1
1 =
+
∂i
x0i0 +
|r − r0 |
|r − r0 | r0 =0
|r − r0 | 0
i
r =0
X
1X
1 1
1
0 0
∂ i0 j 0
xi xj +
∂ i0 j 0 k 0
x0i x0j x0k + · · ·
+
0
0
2
|r − r | 3!
|r − r | i,j
i,j,k
0
0
r =0
r =0
abbiamo cosı̀ ottenuto uno sviluppo funzione di r con potenze di r0 . Ora
calcoliamo gli integrali dei potenziali che contengono la funzione di Green
all’interno (tralasciamo le espressioni legate alle costanti di permeabilità,
16
1. ELETTROMAGNETISMO: IL CASO STAZIONARIO
non rientrano nei calcoli, le reinseriremo nei risultati finali):
(6.8)
Z
D0
ρ(r0 ) 3 0 1
d x =
|r − r0 |
|r|
Z
0
3 0
ρ(r )d x +
X
D
i
1X
1 +
∂i,j
2
|r − r0 | i,j
1 ∂i
|r − r0 | Z
r0 =0
X
1
1 +
∂i,j,k
6
|r − r0 | i,j
r0 =0
ρ(r0 )x0i d3 x0 +
D
ρ(r0 )x0i x0j d3 x0 +
D
Z
r0 =0
Z
ρ(r0 )x0i x0j x0k d3 x0 + · · ·
D
Definiamo a questo i termini di polo del precedente sviluppo come:
Z
(6.9)
E (0) =
ρ(r0 )d3 x0
Z D
(1)
(6.10)
ρ(r0 )x0i d3 x0
Ei =
D
Z
(2)
(6.11)
ρ(r0 )x0i x0j d3 x0
E ij =
D
Z
(3)
(6.12)
E ijk =
ρ(r0 )x0i x0j x0k d3 x0
D
che sono i momenti di ordine n della funzione ρ(r0 )4. Per ottenere l’espressione di ϕ ed A è sufficiente moltiplicare per gli opportuni coefficienti e
sostituire i termini di polo elettrici con quelli magnetici, ottenuti sostituendo j(r0 ) a ρ(r0 ). Per completare la scrittura, in quello che ora possiamo
chiamare sviluppo in serie di multipoli, dei potenziali abbiamo necessità di esplicitare il valore le derivate (che rappresentano i coefficienti dei
termini di polo):
1
(0)
|r|
−1 xi
(1)
∂i (x − x0 )2 + (y − y 0 )2 + (z − z 0 )2 0 = 3
r
xi =0
δij
−3/2 ∂j (xi − x0i )[ (x − x0 )2 + (y − y 0 )2 + (z − z 0 )2
0 =− 3+
r
xi =0
−5/2
3
0
0
2
0
2
0
2
0
(2)
+(xi − xi ) − [ (x − x ) + (y − y ) + (z − z )
(xj − xj )(−2) =
2
δij
xi xj
=− 3 +3 5
r
r
Arrestiamo il calcolo ai coefficienti del termine di quadrupolo, andiamo a
scrivere ora le espressioni dei monopoli cosı̀ ottenute:
(6.13)
3
3
(0)
X
X
xi xj
δij
E
1
1
(1) xi
(2)
ϕ(r) =
+
Ei 3 +
E ij 3 5 − 3 + · · ·
4πε0 r
r
2
r
r
i=1
4In realtà questi sono dei tensori.
i,j=1
6. CAMPO GENERATO DA UNA DISTRIBUZIONE ARBITRARIA DI CARICHE
17
Ripetendo tutti i conti fin qui effettuati per il potenziale vettore A si ottiene:
(6.14)
3
3
(0)
X
X
xi xj
δij
µ0 M
1
(1) xi
(2)
A(r) =
+
M ij 3 5 − 3 + · · ·
Mi 3 +
2π r
r
2
r
r
i,j=1
i=1
Da notare è che scritti in questo modo i potenziali sono decomposti in una
parte statica, i momenti polari (magnetici o elettrici), in una parte dipendente dal punto. Ovvero, data una distribuzione di cariche, una volta che
si sono calcolati i momenti statici, restano solo da calcolare i coefficienti a
seconda del punto dello spazio in cui si vuole calcolare il campo.
A questo punto siamo interessati a calcolare le espressioni esplicite di
alcuni momenti statici notevoli.
Momento di monopolo magnetico. Prima di calcolare M (0) , osserviamo che, poiché tutte le correnti sono contenuti nel dominio D, l’equazione
di continuità (vedi eq. 4.17) ci impone ∇·j = 0, possiamo dunque calcolare
l’integrale nel seguente modo:
Z
Z Z
Z Z
(0)
3 0
2 0
M =
jd x =
jd x dl =
(j · τ )τ̂ d2 x0 dl =
D
Σ γ
σ γ
Z
Z
Z
Z
(6.15)
2 0
2 0
= jτ d x
τ̂ dl =
j · n̂d x
τ̂ dl = i · 0 = 0
Σ
γ
Σ
γ
Per ottenere questo risultato abbiamo usato la possibilità di scomporre
un’integrale triplo in uno di superficie e uno di linea (la ∇·j = 0), osserviamo poi che è sempre possibile fare questa scomposizione prendendo
j k n̂Σ k τ̂ (motivo per cui abbiamo fatto lo scambio tra n̂ e τ̂ nell’ultimo
integrale. Inoltre la curva γ è una curva chiusa di versore tangente τ , questo
giustifica l’essere zero dell’ultimo integrale. In definitiva abbiamo ottenuto
un momento di Monopolo Magnetico nullo, che ci mostra l’essere compatibile della nostra teoria, costruita a partire dal fatto che ∇·B = 0. Che a sua
volta discende dalla non separabilità delle cariche magnetiche.
Momento di monopolo elettrico. Dalla definizione si ha, banalmente, che E (0) = QT OT contenuta nel dominio D.
Momento di dipolo elettrico. Vogliamo ora calcolare il seguente
integrale, in analogia a quanto si fa in meccanica per il baricentro:
(6.16) Z
Z
Z
E (1) =
ρ+ (r)r0 d3 x −
ρ(r)rd3 x =
D
D
|ρ− (r)|rd3 x = Q+ r+ − Q− r−
D
Abbiamo dunque separato le cariche positive da quelle negative e costruito un baricentro delle cariche positive Q+ r+ e un baricentro delle cariche
negative Q− r− . Questo, ovviamente, non dipende dal sistema di coordinate, in particolare se Q+ = Q− possiamo definire un momento di dipolo
elettrico p = Q+ (r+ − r− ) = E (1) , cioè p = Qδ.
Momento di dipolo magnetico. Vogliamo ora calcolare il seguente
integrale:
Z
(1)
(6.17)
M hk =
j h x0k d3 x0
D
18
1. ELETTROMAGNETISMO: IL CASO STAZIONARIO
Per calcolare questa quantità è opportuno calcolare quella che si ottiene
dall’antisimmetrizzazione del tensore h, k, l = 1, 2, 3, ovvero:
Z
Z
1
1
0
0 3
(6.18) ∀σ(1, 2, 3) : −
(j x − j k xl )d x ⇒ m = −
(j × r0 )d3 x
2 D j k
2 D
ovvero:
Z
1
(r0 × j)d3 x
(6.19)
m=
2 D
che rappresenta il momento risultante del vettore densità di corrente. Per
provare a comprenderne meglio il funzionamento applichiamo questo conto
ad una spira circolare piana, con un’area contenuta all’intero S:
I Z
I Z
1
1
0
2
m=
(r × j)d xdl =
(r0 × (j · τ )τ̂ )d2 xdl =
2 γ S
2 γ S
I
I
I
(6.20)
1
1
1
0
0
i(r × n̂)dl = i r × n̂dl = i r0 × dl = iS n̂
=
2 γ
2 γ
2 γ
dunque una spira ha momento di dipolo magnetico m = iS n̂, (vedi thm.
5.1).
Possiamo ora ricavare dalla scrittura in serie di multipoli le espressioni
per i campi elettrici e magnetici, ovvero per il campo elettromagnetico,
tramite le relazioni che abbiamo già usato: E = −∇ϕ = −∇(ϕ0 + ϕ1 + ϕ2 +
· · · ), la parte dovuta a ϕ0 è quella legata al campo, come se fosse generato
da una sola carica, ϕ1 da due e cosı̀ via:
)
(
1
E (0) E (1) 1 E (2)
(6.21)
ϕ(r) =
+ 2 +
+ ···
4πε0
r
r
2 r3
ovvero:
(6.22)
1
E(r) = −
4πε0
p·r
Q
− 2 +∇ 3
=
r
r
1 Q
4πε r2
| {z0 }
t. di monopolo
−
1 r
p · ∇ 3 +···
4πε
r
}
| 0 {z
t. di dipolo
Per sviluppare il termine con il gradiente portiamo avanti il calcolo componente per componente:
(6.23)
X pj r j
rj
1
1 Q
1 X
Ei =
−
∇i
=
−
p j ∇i 3 =
3
2
4πε0
r
4πε0 r i 4πε0
r
i
j
j
δij 1
xi xj
1 Q
1 X
=
+
pj 3 3 −
=
4πε0 r2 i 4πε0
r
r r2
j
pi 1
1 Q
1
xi
=
3 3p · r −
+
4πε0 r2 i 4πε0
r
r r2
1 Q
4πε0 r2
tornando all’espressione vettoriale si ha l’espressione cercata per il campo
elettrico:
(p · r)r
p
Q
1
(6.24)
E(r) =
+3
− 3
4πε0 r2
r5
r
6. CAMPO GENERATO DA UNA DISTRIBUZIONE ARBITRARIA DI CARICHE
19
Possiamo ora passare al campo magnetico, abbiamo per il potenziale A:
µ 0 X xi
µ0 m × r
(6.25)
A=
Mi =
3
4π
r
4π r3
i
Facendo, per ora a meno, di trascinarci dietro le costanti:
Z
X xi
XZ
x0i xi 3 0
r0 · r 3 0
j
M
=
d
x
=
j
d x
(6.26)
i
r3
r3
r3
D0
D0
i
i
Integrando lungo un tubo di flusso, in modo da poter separare l’integrale
triplo nel solito modo, integrale di superficie più integrale di linea, mostriamo
che:
Z h r
r i
(6.27)
j r0 · 3 + r0 j · 3 d3 x0 = 0
r
r
D
Per farlo abbiamo:
Z Z Z Z h r i 2
r
r 2
0 r
0
j n̂ r0 · 3 + r0 n̂ · 3
d xdl =
j r · 3 + r j · 3 d xdl =
r
r
r
r
S γ
S γ
Z Z h Z
Z i
r
r0
0
0
0 r
2
2
0
0
=
j dr r · 3 + r dr · 3 d x =
jd x d r r × 3
=0
r
r
r
S γ
S
γ
|R
{z
}
γ
dw=0 con γ chiusa
Possiamo ora procedere nel seguente modo:
(6.28)
Z 0
Z
Z
r0 · r
r
r
1
rr
1
× j × r0 d3 x0 =
j· 3 =
j 3 − r0 j · 3 d3 x0 =
3
r
2 D r
r
2 Dr
D
Z
1
r
m×r
0 3 0
=−
j×rd x × 3 =
2 D
r
r3
che conferma l’analogia tra campo elettrico e magnetico, mostrando che il
quadripotenziale di dipolo è:
1 p·r
ϕ(1) =
4πε0 r3
(6.29)
µ m×r
(1)
A = 0
4π r3
Calcoliamo ora, per concludere, il vettore induzione magnetica generato da
A(1) come B = ∇×A(1) , ovvero:
µ0 m × r
µ0
1
∇×
=
B =∇×
=
m
×
∇
4π r3
4π
r
µ0
1
1
=
m ∇·∇
− ∇ (∇m) =
4π
r
r
(6.30)
=
µ0
4π
m ∇2 1 −∇ 1 (∇m) = −∇ϕm
r
r
|{z}
=0
µ0
∇ 1r m, ovvero B = −∇ϕm , abbiamo ottenuto che il
avendo posto ϕm = 4π
campo magnetico prodotto solamente da un dipolo è frutto di un potenziale
20
1. ELETTROMAGNETISMO: IL CASO STAZIONARIO
scalare magnetico, ovvero ha una divergenza non nulla. Questo perché abbiamo immaginato nel modello la presenza di due poli per il magnete, che
fungono da cariche localizzate ai fine della generazione del campo.
7. Interazioni tra campi e cariche
Ricordiamo che per carica infinitesima si intende la quantità dq = ρd3 x,
scriviamo ora la forza elementare che agisce sulla carica elementare:
(7.1)
dF = (dqE + dqv × B)d3 x = (ρE + j × B)d3 x
dove E e B sono prodotte da cariche e correnti che chiamiamo generatrici e
dove stiamo supponendo/imponendo che le cariche di un campo di un certo
tipo sentano solo forze di quel tipo di campo. Questa forza è chiaramente
quella che in meccanica si chiama sollecitazione, ovvero una forza infinitesima applica per ogni punto. Siamo dunque interessati, in analogia a quanto
si faceva in meccanica, a calcolarne la risultante e il momento risultante.
Per quanto riguardo la risultante dobbiamo, come già detto, considerare le cariche e le correnti che generano i campi E e B esterne al sistema
e non modificate dalla presenza delle cariche e delle correnti del sistema.
Otteniamo quindi, detta D la regione di spazio che contiene il sistema:
Z
(7.2)
F =
ρE + j × Bd3 x
D
Per quanto riguarda il momento risultante assumiamo che il polo di
riduzione dei momenti sia assunto nell’origine del nostro sistema di riferimento (semplifichiamo in modo ragionevole i calcoli), ovvero:
Z
(7.3)
M=
r × (ρE + j × B)d3 x
D
Se supponiamo che D sia contenuto in un dominio sferico di raggio piccolo
rispetto alla distanza dalla sorgenti, che nel nostro caso corrisponde con
l’origine, possiamo fare un cambio di sistema di riferimento e supporre di
descrivere ciò che avviene all’interno del dominio D a partire da un’origine
fissata P 0 , ovvero P − P 0 = r0 , cioè r = r0 + r0 . Sviluppiamo E e B in serie
di multipoli in un intorno di P 0 :
X
X
1
0
(7.4)
E i (P ) = Ei (P0 ) +
∂j E i xj +
∂k ∂j E i x0j x0k + · · ·
2
j
j,k
P0
P0
E analoga scrittura per B. I termini di multipolo compariranno solo nella
scrittura sotto il simbolo di integrale. Riotteniamo in questo modo il calcolo
fatto attraverso i multipoli nel paragrafo precedente. Ovvero la distribuzione
dei momenti del sistema di cariche che vogliamo descrivere. Vediamo questa
teoria a lavoro per un paio di casi semplici.
La carica puntiforme. In questo caso la forza risultante sulla carica q
si scrive semplicemente come F = q(E + v × B), dunque possiamo calcolare
facilmente il lavoro infinitesimo come dL = dF dr = q(E + v × B) · vdt =
qvEdt = jEdt = qEdr che è coerente con l’osservazione fatta in partenza sulla Forza di Lorentz, ovvero questa è una forza puramente deviatrice
che non compie lavoro, dunque il lavoro di F dipende solo dalla Forza di
7. INTERAZIONI TRA CAMPI E CARICHE
21
Coulumb, possiamo quindi scrivere il lavoro tra due punti A, B lungo una
curva C come:
Z B
Z B
Edr = q
(7.5)
L=q
−dϕ = q(ϕ(B) − ϕ(A))
A,C
A
Il teorema delle forze vive ci dice che dL = −dU , usando l’identità appena
scoperta possiamo dire che dU = qdϕ, ovvero, integrando, che U = qϕ,
introduciamo a questo punto l’unità di misura volt come 1 volt (V) = 1
Joule (J) ·1 Coulumb (C). In alcuni casi è utile anche l’unità di misura
detta Elettronvolt (eV) definita come 1eV = 1.6 · 10−19 J.
Due cariche a distanza ravvicinata. Questo caso si distingue in due
sottocasi, uno dei quali ricade nel precedente, infatti se le cariche hanno
lo stesso segno è conveniente considerare una carica di somma delle due
disposta nel baricentro. Nel caso in cui le cariche avessero segno opposto,
ma modulo uguale, e si trovassero ad una distanza d otteniamo un dipolo
elettrico di modulo |p| = qd, in questo caso possiamo scrivere la forza come:
(7.6)
F = − qE(r− ) + qE(r+ ) = q(E(r+ ) − E(r− )) = q[E(r− + d) − E(r)] =
"
#
"
#
X
X
=q E(r− ) +
(∇i E)di + · · · − E(r− ) = q
(∇i E i )di
i
i
P
dunque F = i (qdi · ∇i )E = (p · ∇)E, ovvero se E è uniforme il campo è
zero. Riscrivendola per componenti si ha:
X
X ∂E
X
i
(7.7)
Fi =
pj =
pj E j
p j ∇i E j = ∇i
∂xj
j
j
j
Abbiamo ottenuto come espressione per la risultante F = ∇((p)·E) = −∇U
ovvero il potenziale scalare di un dipolo elettrico immerso in un campo
elettromagnetico è dato da: U = −p·E. Dobbiamo ora calcolare il momento
risultante, per farlo ci poniamo nell’ipotesi semplificativa di risultante nulla,
in questo modo il momento è indipendente dal polo di riduzione ed è solo
torcente, otteniamo:
M = d × qE = qd × E = p × E
(7.8)
Corrente in un campo di induzione magnetica. Supponiamo di
voler calcolare la risultante F di un campo magnetico su una corrente j,
per farlo siamo intenzionati a scomporre l’integrale triplo al solito modo in
un integrale di superficie più uno di linea, a livello differenziale abbiamo
dF = (j × B)d3 x = j × Bd2 xdl, ovvero, integrando:
I Z
I Z
I
2
2
(7.9)
F =
j × Bd xdl =
(j · n̂)n̂ × Bd xdl = i
dl × B
C
Σ
C
Σ
C
Abbiamo cosı̀ ottenuto un risultato, storicamente notevole:
Teorema 7.1 (Seconda formula di Laplace). Data una corrente j e un
campo di induzione magnetica B si ha che dF = i(dl × B), ovvero:
I
(7.10)
F = i dl × B
γ
22
1. ELETTROMAGNETISMO: IL CASO STAZIONARIO
Supponiamo ora di avere due file indefiniti percorsi tra corrente disposti
parallelamente tra di loro ad una distanza δ (vedi fig.8), vogliamo calcolare
l’effetto del campo magnetico generato dal primo sul secondo e viceversa,
per farlo sfruttiamo la seconda formula di Laplace, scriviamo dF = i2 dl × B
Figura 8. Fili Indefiniti percorsi da corrente.
e il simmetrico per le forza esercita dal secondo sul primo, a questo punto dobbiamo ridurci ad un tratto di filo finito (altrimenti la forza sarebbe
infinita. . . ), per farlo ci conviene definire la forza per unità di lunghezza:
I L
F 1
µ0 i1 i2 µ0 i1 i2 (7.11)
dl = L = L
2π δ
2π δ 0
da cui possiamo ricavare il valore di F come:
µ0 i1 i2 ˆ
L(i1 − iˆ2 )
(7.12)
F =
2π δ
e la seguente regola pratica: fili percorsi da correnti equiverse si attraggono,
fili percorsi da correnti di verso opposto si respingono. Questa struttura
ci permette di dare inoltre una nuova definizione per l’unità di misura
Ampere, ovvero, si considera la struttura della figura 8 si prendo una L =
δ = 1m, considerando che µ0 = 4π · 10−7 H/m si ha che 1A (Ampere) è
l’intensità di corrente che genera una forza risultante F di modulo F =
2 · 10−7 N , dunque al livello dimensionale è 1(A) = 1(C) · 1(m2 ) · 1s−1 .
Arrivati a questo punto possiamo dedicarci ancora una volta al Teorema
di Equivalenza di Ampere (vedi thm. 5.1) riformulandolo nel seguente
modo:
Teorema 7.2 (Equivalenza di Ampere). Data una spira percorsa da corrente il campo magnetico prodotto dalla spira è equivalente a quello di un
dipolo magnetico.
Dato un campo di induzione magnetica B vi poniamo una spira rettangolare di cui indichiamo con b il lato corto e con a il lato lungo percorsa da
una corrente i nel verso indicato in figura 9, ci poniamo anche nell’ipotesi
in cui le dimensioni della spira siano trascurabili rispetto a quelle delle linee
di campo magnetico in cui è immersa. Calcoliamo la risultante della forza
esercitata da B sulla spira utilizzando la seconda formula di Laplace, ovvero
calcoliamo l’integrale:
I
(7.13)
F =i
dl × B
C
7. INTERAZIONI TRA CAMPI E CARICHE
23
Figura 9. Spira immersa in un campo magnetico B
sui quattro lati della spira, come si evince facilmente dalla figura questo
è banalmente F = 0, infatti per ogni punto della spira in cui è applicata
una forza ne esiste uno opposto in cui è applicata la medesima forza con
medesima direzione e verso opposto. Calcoliamo ora il momento risultante,
osserviamo immediatamente che le forze F 1 e F 2 hanno braccio nullo, dobbiamo dunque preoccuparci solo delle forze F 3 e F 4 , poiché la risultante è
nulla il polo di riduzione rispetto a cui calcoliamo il momento è indifferente,
dunque ci conviene fissarlo nel punto ⊗ (vedi parte a destra della figura 9),
abbiamo quindi: |M | = b(|B|i)a sin(θ) = iab sin(θ)|B|, ovvero, in forma vettoriale M = m × B. Questo continua a mantenere l’analogia con il campo
elettrico per cui ricordiamo era M el = p × E vettore del momento del dipolo
elettrico. Facciamo una tabella riassuntiva delle analogie tra dipolo elettrico
e dipolo magnetico fin qui ottenute, vedi tab. 1.
Dipolo Elettrico Dipolo Magnetico
p
m
F =0
F =0
M =p×E
M =m×B
U = −p · E
U = −m · B
Tabella 1. Analogie tra dipolo elettrico e dipolo magnetico
Spire ed energia potenziale. Sfruttiamo ancora il teorema di equivalenza per ottenere informazioni sull’energia potenziale, supponiamo di avere
una superficie S il cui bordo, percorso da una corrente i, è rappresentato
da una curva C regolare a tratti. Decomponiamo la superficie S in dSi superfici infinitesime a interni disgiunti, con i relativi bordi infinitesimi dCi .
Fissiamo il verso della corrente sui dCi in modo che la normale orientata
punto per punto a dSi sia parallela alla normale ad S in quel punto. Ogni
elemento di circuito si comporta come come una spira piana infinitesima
percorsa da corrente a cui possiamo associare un momento di magnetizzazione dm = idS n̂ da cui deriviamo l’energia potenziale infinitesima come
dU = −dm · B, facciamo la seguente riscrittura:
(7.14)
dU = −idS(n̂ · B) = −i(B · n̂)dS = −idΦdS (B)
24
1. ELETTROMAGNETISMO: IL CASO STAZIONARIO
Possiamo
ora calcolare l’energia potenziale di tutta la superficie come U =
R
dU , osserviamo che idΦdS (B) rappresenta la corrente concatenata a tutto
il perimetro infinitesimo della spira, cioè:
Z
(7.15)
U = dU = −iΦC (B)
Questo poiché ogni tratto di spira è percorso dalla corrente i una volta in un
verso e una volta nel verso opposto, dunque l’unica parte a non essere percorsa in entrambi i versi è il bordo esterno della superficie stessa. Quanto
abbiamo ottenuto è in realtà indipendente dalla superficie, infatti è sufficiente che questa abbia come bordo la C in oggetto5. Osserviamo inoltre
che per il lavoro vale:
(7.16)
dL = −dU = diΦC (B) + idΦC (B)
Dunque se il campo magnetico è disomogeneo, oppure la spira si deforma,
cioè il flusso varia, questo fa variare il lavoro. Supponiamo i costante e
B variabile, ovvero dL = idΦC (B) e studiamo due casi particolari della
variazione di B all’interno della classe dei movimenti rigidi.
Traslazioni rigide. Supponiamo di fare una traslazione rigida di vettore dz, in questo modo dL = F · dr ovvero dL = idΦC (B) = i∇Φdr, cioè
F = i∇(ΦC (B)), che è uguale a zero in caso di B uniforme e diverso da zero
altrimenti.
Rotazioni. Supponiamo di fare una rotazione di vettore angolare dθ,
C
in questo modo abbiamo che dL = Mθ · dθ ovvero dL = idΦC (B) = i ∂Φ
∂θ dθ
(potrebbe dipendere dal tempo), ovvero il momento assiale attorno all’asse
C
di rotazione è dato da: Mθ = i ∂Φ
∂θ .
8. Generare un campo elettrico
Dato uno spazio vuoto vogliamo generare un campo elettrico E, cioè
vogliamo prendere delle cariche q1 , q2 , . . . , qn dall’infinito e portarle nella
regione di spazio in cui vogliamo generare il campo. La prima domanda da
porsi in questo caso è: ho usato energia per costruire questo campo elettrico?
Portare la prima carica ha avuto sicuramente un lavoro L1 = 0, ma questo è
piuttosto ovvio, in realtà essendo nel vuoto non posso sapere se ho realmente
spostato la carica o se ho fissato l’origine nel luogo in cui la carica si trovava6.
Ora che abbiamo fissato la carica q1 abbiamo determinato la posizione di
tutte le altre cariche, quindi nel disporre la carica q2 a distanza r1,2 dalla
carica q1 dobbiamo fare i conti con E campo elettrico generato dalla carica
q1 , ovvero:
1 q1
(8.1)
L2 = q2
4πε0 r1,2
Ora dobbiamo ripetere lo stesso procedimento con la carica q3 , solo che
questa volta il campo elettrico E è quello generato dalle cariche q1 e q2 ,
quindi:
1 q1
1 q2
(8.2)
L2 = q3
+
4πε0 r1,3 4πε0 r2,3
5B è solenoidale.
6Lo spazio è omogeneo e isotropo.
8. GENERARE UN CAMPO ELETTRICO
25
Dunque in generale si ha:
(8.3)
L i = qi
i−1
1 X qk
4πε0
rk,i
k=1
Il lavoro totale risulta quindi essere:
(8.4)
n
n
i−1
n
X
1 X X qk
1X
1 X qj
L=
Li =
qi
=
ϕi qi ove ϕi =
4πε0
rk,i
2
4πε0
ri,j
i=1
i=1
i=1
k=1
i6=j
Nel caso in cui invece di una distribuzione discreta volessimo ottenere una
distribuzione continua, possiamo sostanzialmente ottenere lo stesso risultato
a patto di introdurre un piccolo artificio, introduciamo un parametro α ∈
[0, 1] per cui possiamo esprimere carica totale e funzione totale come:
(8.5)
q(α) = αqT
ϕ(α) = αϕT
dove ϕT e qT rappresentano il potenziale e la carica totale alla fine del
processo, in questo modo otteniamo che:
(8.6)
Z
Z 1
1
dU =
ρϕd3 x = dqϕ(α) = αϕT qT α ⇒ U = ϕT qT
αdα = ϕT qT
2
D
0
Ovvero possiamo scrivere:
Z
(8.7)
dU =
3
ϕdρd x =
Z
dud3 x
dove abbiamo introdotto la densità infinitesima di energia data da du =
ϕdρ = (ϕT α)(ρT α), dunque, integrando, otteniamo:
Z
(8.8)
1
u=
0
1
ρT ϕT αdα = ρT ϕT
2
Ovvero la densità di energia contenuta in un volumetto infinitesimo è data
da u = 1/2ρϕ, cioè è l’opposto del lavoro fatto per mettere una carica ρd3 x
in un punto dello spazio con potenziale ϕ. Sfruttando il teorema di Gauss
possiamo scrivere ρ = ε0 (∇·E), dunque possiamo scrivere u = 1/2ε(∇·E)ϕ,
ma ∇(ϕE) = (∇·E)ϕ + ∇(ϕ)E cioè u = 1/2ε0 (−∇(ϕ)E + ∇·(ϕE)), dunque
possiamo scrivere l’energia totale nel dominio D come:
Z
1
(8.9)
U = ε0
−∇(ϕ)E + ∇·(ϕE)d3 x
2
D
ma era anche:
Z
(8.10)
U=
D
1
ρϕd3 x =
2
Z
R3
1
ρϕd3 x poichè ρ(R3 \ D) = 0
2
26
1. ELETTROMAGNETISMO: IL CASO STAZIONARIO
che continua ad essere valido, dunque:
(8.11)
Z
Z
Z
1
1
3
2 3
2
U = ε0
−∇(ϕ)E + ∇·(ϕE)d x = ε0
|E| d x +
(ϕE)n̂d x
2
2
R3
R3
∂R3
Z
Z
1 Z
1
(ϕE)n̂d2 x = ε0
|E|2 d3 x
|E|2 d3 x + lim
= ε0
R→+∞ ∂BR (0)
2 R3
2
3
R
|
{z
}
=0
dove il termine con il limite vale zero poiché il potenziale va all’infinito come
R−2 , cioè è sommabile e ha integrale nullo. Se nel compiere tutti questi conti
avessimo tenuto conto anche del campo magnetico avremmo ottenuto:
(8.12)
1
B2
2
ε0 E +
U=
2
µ0
Introduciamo ora le due seguenti definizioni:
Definizione 8.1. Si chiama vettore spostamento il vettore D = ε0 E.
Definizione 8.2. Si chiama vettore campo magnetico il vettore H =
B
µ0 .
In questo modo possiamo scrivere:
(8.13)
U=
1
[E · D + B · H]
2
Che è l’energia del campo elettromagnetico, ovvero lavorando nell’ipotesi in cui tutto il lavoro fornito nella creazione del campo elettromagnetico è immagazzinato nel campo, abbiamo che la sua energia è quella qui
ricavata.
L’ipotesi che abbiamo fatto è, tuttavia, non del tutto giustificata, per
vederne un limite proviamo a calcolare il lavoro necessario a mettere insieme
n cariche nei due modi che abbiamo studiato, ovvero calcoliamolo una volta
mediante la somma e una volta integrando la funzione densità di energia, se
l’ipotesi fosse giustificata avremmo che i due valori coincidono, cioè che:
(8.14)
1X
1
L=
qi ϕi = ε0
2
2
i
Z
R3
|E|2 d3 x
8. GENERARE UN CAMPO ELETTRICO
27
Sviluppiamo il secondo termine e vediamo se è realmente uguale al primo:
(8.15)
Z
Z X 2
Z X
1
1
1
3
2 3
L = ε0
|E| d x = ε0
E i d x = ε0
E i · E j d3 x =
2
2
2
R3
R3 i
R3 i,j
Z X
Z
1
1 X
3
(∇·E i ) · ϕj d3 x =
= ε0
E i · (−∇ϕj ) > d x = ε0
2
2
3
3
R
R
i,j
i,j
1X
1 XX
1X
=
qi ϕj (ri ) =
qi ϕi (ri ) +
qi ϕj (ri ) =
2
2
2
i,j
=
=
1X
2
i
i
qi ϕi (ri ) +
1X
2
i
i
qi
X
i6=j
ϕj (ri ) =
i6=j
1X
qi ϕi (ri ) + L
2
i
Abbiamo ottenuto un termine in più rispetto a quello che ci aspettavamo, o
per meglio dire, a quello che ci aspettavamo in virtù dell’ipotesi che abbiamo
fatto. Il termine che abbiamo ottenuto è, inoltre, un termine divergente di
cui dobbiamo giustificare l’entrata in scena e giustificare il perché sia legittimo trascurarlo. In realtà compiendo il calcolo in due modi diversi stiamo
guardando due fenomeni differenti. In un caso prendevamo delle cariche dall’infinito e le portavamo al finito, ma quanto abbiamo faticato per costruire
le cariche all’infinito? Chi ce le ha date? Una buona giustificazione di questo
termine divergente è rappresentata dall’essere la quantità di energia necessaria a ”creare” una carica elettrica. Questa apparente incongruenza ci ha
fatto scoprire, di nuovo, che una carica elettrica non può essere creata e che
non può essere persa, se ne perdessi una avrei in cambio un’energia infinita. Chiamiamo questo termine autoenergia (dell’elettrone) della carica
elettrica e ci ricordiamo di non tenerla mai in conto quando calcoliamo
l’energia di un campo.
CAPITOLO 2
Elettromagnetismo: il caso non stazionario
Ciò a cui vogliamo arrivare è una modifica delle eq. di Maxwell per far si
che queste prevedano possibilità di variazione del campo E e del campo B.
Cominciamo dal supporre una variazione della ∂ρ/∂t, poiché abbiamo appena osservato che non possiamo creare ne distruggere le cariche elettriche,
dobbiamo supporre l’esistenza di un ”serbatoio di cariche” all’infinito da cui
faremo arrivare le cariche. Procediamo per gradi. Supponiamo di avere:
(0.16)
1 q(t)
r̂
4πε0 r2
E(r, t) =
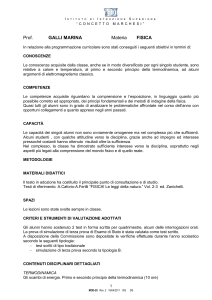
mettiamoci nella seguente situazione ideale, il serbatoio di cariche che abbiamo appena discusso e una sfera che stiamo caricando con cariche prese dal
serbatoio (vedi fig. 1). In questa situazione possiamo dare la seguente legge
Figura 1. Caricare una sfera.
per la variazione della carica:
Z
(0.17)
q(t) = ε0
(E · n̂)d2 x
S
Di cui noi vogliamo calcolare la variazione nel tempo, supponendo la superficie S non dipendente dal tempo possiamo scrivere:
Z dq(t)
∂E
(0.18)
= ε0
· n̂ d2 x
dt
∂t
S
a questa variazione di carica deve essere associata ad una densità di corrente,
infatti la carica fluendo dal serbatoio alla sfera passa attraverso la superficie
29
30
2. ELETTROMAGNETISMO: IL CASO NON STAZIONARIO
immaginaria S, quindi possiamo scrivere:
Z
dq(t)
(0.19)
−
= (j · n̂)d2 x
dt
S
questo è il momento in cui entra in gioco la congettura, di derivazione
sperimentale, di Maxwell:
Congettura 1 (Maxwell). Per modificare un campo elettrico deve passare
una corrente e le due espressioni date per la carica devono coincidere.
per ricavare un risultato quantitativo dalla congettura sfruttiamo il Teorema di Gauss in forma locale, scriviamo:
∂ρ
∂
∂
(0.20)
ρ = ε0 ∇·E ⇒
=
(ε0 ∇·E) = ∇· ε0 ∇·E = −∇·j
∂t
∂t
∂t
La corrente generalizzata deve essere solenoidale, come abbiamo già
osservato le cariche sono quelle che sono, possono solo muoversi. Abbiamo
ottenuto il seguente fatto:
Fatto 1. La corrente ha origine dove il campo elettrico varia, ovvero:
∂
∂
(0.21)
∇· j + ε0 E = 0 = ∇· j + D
∂t
∂t
Possiamo quindi riscrivere la quarta equazione di Maxwell come:
∂E
(0.22)
∇×B = µ0 j + ε0
∂t
Osserviamo che già con questa modifica non abbiamo più un sistema
di equazioni disaccoppiate, abbiamo costruito un sistema di 12 equazioni di
cui almeno 6 sono accoppiate tra loro. Ci occuperemo in dettaglio di questo
dopo aver ottenuto le modifiche necessarie per le altre equazioni di Maxwell.
Introduciamo a questo punto il concetto di forza elettromotrice.
Definizione 0.3. Dati due punti dello spazio a potenziale elettrico ϕ+ e
ϕ− tali che ϕ+ > ϕ− chiamiamo f.e.m., forza elettromotrice, la forza che
fa circolare una corrente i nella direzione non spontanea, ovvero da ϕ− in
direzione di ϕ+ .
Possiamo ora costruire il primo apparato elettrotecnico, ovvero la pila, ovvero un generatore di f.e.m., ovvero un oggetto come in figura 2.
Non siamo interessati a ciò che, in realtà, genera la f.e.m. ci limiteremo a
supporre che sia una reazione chimica in grado di causare la forza elettrica
opportuna, ovvero una forza che spinge le cariche negativa verso la direzione
’negativa’, cioè a potenziale minore1. Per osservare ciò che avviene consideriamo una carica q libera di muoversi all’interno della pila (come riportato
in fig. 2), questa è soggetta ad una forza F = f.e.m. + qE, questo processo
non può andare avanti indefinitamente, dopo un certo tempo ∆t si avrà,
necessariamente, che F = 0 a avremo trovato una soluzione di equilibrio per
cui il E T OT totale interno sarà zero e ci troveremo in un caso di accumulo
di cariche positive ad un lato e negative ad un altro.
1Si parla correttamente di cariche poiché è in generale falso a dire che sono gli elettroni
a trasportare la carica, questo è vero, ad esempio, nei conduttori, mentre per quanto
riguarda altre situazioni, come le soluzioni, sono gli ioni a fungere da vettori per la carica.
2. ELETTROMAGNETISMO: IL CASO NON STAZIONARIO
31
Figura 2. Pila
Osserviamo che il campo elettromotore Em non è conservativo, per
farlo consideriamo un circuito rettangolare C orientato come il campo elettromotore contenuto per un solo lato all’interno della pila (vedi fig. 3)
calcoliamo a questo la circuitazione del campo elettromotore lungo la curva
Figura 3. Non conservatività del campo Em
C come:
I
Z
A
Em dl =
(0.23)
C
Z
B
Em dl +
B
Z
A
0dl =
A
B
|
Em dl = −
{z }
Z
B
Edl := f.e.m.
A
≥0
che rappresenta la differenza di potenziale ai capi della pila, ovvero quella che
chiamiamo impropriamente forza, è in realtà una differenza di potenziale.
Sfruttiamo il concetto che abbiamo appena definito per modificare la
seconda equazione di Maxwell, consideriamo una barretta di materiale conduttore che si muove lungo un piano orizzontalmente con una velocità v
costante immersa in un campo di induzione magnetica B costante ortogonale al piano, ovvero la situazione rappresentata nella figura 4, le cariche
contenute nella barretta conduttrice sono sottoposte alla forza di Lorentz
esercitata dal campo di induzione magnetica B, dunque possiamo individuare la forza che su esso agisce come F = qv × B a cui possiamo associare
un campo elettromotore Em = σv × B lungo l’asse centrale della sbarretta,
32
2. ELETTROMAGNETISMO: IL CASO NON STAZIONARIO
Figura 4. Conduttore mobile immerso in un campo di
induzione magnetica costante
calcoliamo a questo punto la forza elettromotrice che agisce sulla sbarra:
Z B
Z B I
ds
dl(v × B) =
B dl ×
=
f.e.m. = (v × B)dl =
dt
A
A
γ
(0.24)
Z B
Z
Z
(dl × ds)
d2 x
∂
=
B·
= B · n̂
=
B · n̂d2 x
dt
dt
∂t
A
Ovvero abbiamo mostrato che:
∂
(0.25)
f.e.m. = ΦAB (B)
∂t
Quello che abbiamo costruito è un campo elettrico E = −Em = −v × B
ovvero una forza elettromotrice data da f.e.m = vBl, dove l rappresenta la
lunghezza della barretta. Il primo risultato che abbiamo ottenuto da questa
costruzione è che il campo generato dalla f.e.m. non è irrotazionale,
poiché è prodotto dalla forza di Lorentz. Possiamo dunque generalizzare il
risultato appena ottenuto ad ogni circuito nel seguente modo:
Teorema 0.1 (Legge di Faraday-Neumann-Lenz). Dato un circuito γ di
forma qualsiasi, un campo di induzione magnetica B (anche non uniforme)
e un moto di rotazione di B parallelo ad un asse û si ha:
Z
∂
∂
(0.26)
f.e.m. = Φ(B) = −
B · n̂d2 x
∂t
∂t
Che si regge sulla seguente ipotesi sperimentale, di derivazione simile
alla congettura di Maxwell, che afferma:
Congettura 2. Dato un circuito γ di forma qualsiasi, un campo di induzione magnetica B (anche non uniforme) e un moto di rotazione di B
parallelo ad un asse û, mette in moto le cariche e fa sı̀ che nel circuito
cominci a fluire una corrente (vedi fig. 5).
Quello che dobbiamo fissare è il verso di percorrenza della corrente che si
genera all’interno del circuito, questa genera, per quello che abbiamo visto,
un campo di induzione magnetica, dunque se riusciamo a fissare il verso
del campo magnetico abbiamo fissato anche il verso di percorrenza della
corrente. Si ha che il campo magnetico prodotto dalla corrente tende ad
opporsi al campo magnetico che ha generato la corrente, ovvero tende a
2. ELETTROMAGNETISMO: IL CASO NON STAZIONARIO
33
Figura 5. Conduttore che ruota in un campo magnetico costante
non far variare il flusso di B e in questo modo abbiamo fissato tutti i versi
ottenendo:
I
I
Z
(0.27)
f.e.m. = Em dl = Edl = (∇×E) · n̂d2 x
γ
S
confrontandolo con l’equazione 0.26 otteniamo la relazione:
∂
B
∂t
cioè abbiamo trovato la modifica della seconda equazione di Maxwell, ottenendo in definitiva:
ρ
∇·E =
ε
0
∇·B = 0
∂
(0.29)
∇×E = − B
∂t
∂E
∇×B = µ0 j + ε
∂t
(0.28)
∇×E = −
Quello che ci aspetta ora è risolvere questo set di equazioni differenziali.
Possiamo introdurre a questo punto due concetti collaterali a quanto
appena visto sulla terza equazione di Maxwell, ovvero possiamo parlare dei
casi di flusso tagliato e di quelli di flusso concatenato. Partendo dal
più semplice, cioè il flusso tagliato, nel caso in cui l’oggetto su cui si induce
la f.e.m. si muova attraverso il campo di induzione magnetica B con un
moto puramente traslatorio lungo una direzione costante rispetto a questo,
senza deformarsi, possiamo ottenere il campo elettromotore indotto come la
semplice opposizione al campo di Lorentz generato, si veda l’esempio della
sbarretta con cui abbiamo cominciato. Se invece il moto dell’oggetto nel
campo di induzione magnetica B è vario, cioè se non è possibile descrivere
lo spostamento delle cariche tramite la forza di Lorentz, si pensi ad esempio
ad una spira che ruota nel campo, oppure, ancora peggio, ad una spira che
lentamente si gonfia nel campo2. In questi casi si parla di flusso concatenato,
ovvero non è possibile spiegare il fenomeno semplicemente con la legge di
2In questo caso si ottiene il flusso come un integrale dagli estremi dipendenti dal
tempo.
34
2. ELETTROMAGNETISMO: IL CASO NON STAZIONARIO
Lorentz e bisogna appellarsi all’ipotesi sperimentale ??. Questi due casi
sono completamente slegati.
1. La soluzione delle eq. di Maxwell: l’equazione delle onde
Cominciamo a risolvere le equazioni 0.29 partendo da ∇·B = 0, che, per
quanto abbiamo visto, implica B = ∇×A, possiamo dunque scrivere per
l’equazione sul rotore del campo elettrico:
∂
∂A
∂A
=0⇒E+
(1.1) ∇×E +
(∇×A) = 0 ⇔ ∇× E +
= −∇φ
∂t
∂t
∂t
Ovvero abbiamo ottenuto la seguente coppia di espressioni per il campo
elettrico e quello magnetico:
(
B = ∇×A
(1.2)
∂A
E = −∇φ −
∂t
Per il caso stazionario avevamo fissato la gauge di Coulumb 3, vogliamo
sceglierne una opportuna per questo caso, ovvero vogliamo ottenere che
cambiando A in A0 e φ in φ0 , l’espressione di E resti inalterata, cioè:
0
∂A
∂A0
A = A + ∇χ
0
= E = −∇φ −
⇔
(1.3)
E = −∇φ −
φ0 = φ + h
∂t
∂t
Imponiamo dunque le opportune condizioni sulle funzioni χ ed h:
∂
∂A
∂χ
0
0
E = − ∇φ −
(A + ∇χ) = −∇φ −
−∇
=
∂t
∂t
∂t
( 0
(1.4)
A = A + ∇χ
∂A
∂χ
=−
− ∇ φ0 +
⇔
∂χ
∂t
∂t
φ0 = φ +
∂t
fissiamo a questo punto la seguente gauge, detta gauge di Lorentz:
(1.5)
∇·A = −
1 ∂φ
1 ∂φ
=− 2
ε0 µ0 ∂t
c ∂t
ovvero, sfruttando l’operatore · e il vettore A = (φ/c, A), abbiamo:
∂ φ
∂ct c
Trattiamo ora la quarta equazione sfruttando la gauge appena imposta:
(1.6)
· A = 0 ⇔ ∇·A = −
(1.7)
∂E
1 ∂
∂A
∇×B = µ0 j + ε0
⇒ ∇×(∇×A) = µ0 j − 2
∇φ +
⇒
∂t
c ∂t
∂t
1
∂φ
1 ∂2A
2
⇒ ∇(∇·A) − ∇ A = µ0 j − 2 ∇
− 2
⇒
c
∂t
c
∂t2
1 ∂2A
2
⇒∇ A− 2
= −µ0 j
c
∂t2
|
{z
}
eq. delle onde o di D’Alambert
3Gauge di Coulumb: ∇·A = 0, vedi 4.
1. LA SOLUZIONE DELLE EQ. DI MAXWELL: L’EQUAZIONE DELLE ONDE
35
Non ci resta, per ottenere la coppia finale di equazioni dei potenziali, che
calcolare l’ultima equazione:
ρ
ρ
∂A
∂A
ρ
2
∇·E =
⇒ ∇· −∇φ −
=
⇒ ∇2 φ − ∇·
=− ⇒
ε0
∂t
ε0
∂t
ε0
2
(1.8)
∂
1 ∂ φ
ρ
ρ
⇒ ∇2 φ +
(∇·A) = − ⇒ ∇2 φ − 2 2 = −
∂t
ε0
c ∂t
ε0
|
{z
}
eq. delle onde o di D’Alambert
Abbiamo quindi costruito la coppia di equazioni differenziali alle derivate
parziali data:
1 ∂2A
∇2 A −
= −µ0 j
2
c2 ∂t
(1.9)
2
∇2 φ − 1 ∂ φ = − ρ
c2 ∂t2
ε0
Come era già accaduto, le equazioni per i potenziali sono uguali, un’altra
verifica del fatto che ha più senso parlare di campo elettro-magnetico, piuttosto che di campo elettrico e di campo magnetico. Risolviamo il caso
generico di questa equazione per una funzione ψ e sostituiamo al termine i
simboli corretti per i due casi.
Dobbiamo quindi risolvere un’equazione della forma:
1 ∂2ψ
∂ψ
−β
− γψ = −s(r, t)
v 2 ∂t2
∂t
con i coefficienti di grado 1 e 0, posti uguali a zero (cioè β = γ = 0),
chiamiamo il coefficiente v velocità di propagazione dell’onda:
(1.10)
∇2 ψ −
1 ∂2ψ
= −s(r, t)
v 2 ∂t2
Prima di mettere mano ai conti facciamo un’analisi qualitativa dell’equazione, affinché questo problema abbia senso dobbiamo avere che in un
certo istante t in una determinata posizione r la funzione s(r, t), che chiameremo sorgente, sia s(r, t) 6= 0, dopo una certa quantità di tempo ∆t,
caratteristica dell’onda in oggetto, questa avrà generato un effetto che si
sarà propagato in tutto lo spazio, in modo indipendente dalla posizione r
iniziale. Di tutta questa fase transiente sono interessato solo al fatto che
l’onda sia stata effettivamente generata, questo ci risolve la dipendenza dalle
coordinate dell’equazione. Per quanto riguarda la dipendenza dal tempo 4
dobbiamo distinguere due casi, quello in cui la funzione sorgente è costantemente attiva, cioè s(r, t) 6= 0 ∀t e quello in cui la sorgente resta ”accesa”
per una quantità limitata di tempo. Queste due situazioni danno origine a
soluzioni completamente diverse. Se siamo nel caso s(r, t) 6= 0 ∀t, abbiamo,
come è logico che sia, che la soluzione ψ tenda asintoticamente al valore della
sorgente, ovvero che ψ → s per t → ∞, ci troviamo in un caso di soluzione
forzata. Nell’altro caso abbiamo che la soluzione si propaga nel tempo, dal
momento iniziale in cui essa vale zero fino a quando assume un valore piuttosto stabile. Vogliamo metterci in questo secondo caso e risolvere dunque
(1.11)
∇2 ψ −
4Per essere più precisi: dalla coordinata tempo.
36
2. ELETTROMAGNETISMO: IL CASO NON STAZIONARIO
l’equazione:
1 ∂2ψ
=0
v 2 ∂t2
Le soluzioni di questa equazione sono tutte della forma:
(1.12)
∇2 ψ −
A(r̂)
g(u − u0 )
rα
dove è la forma esplicita di u a stabilire la soluzione, la u è, in generale,
una funzione di (r, t, k, ω), dove r è il vettore posizione, t il tempo, k un
coefficiente che dipende dalle coordinate e ω un inverso del tempo che funge
da coefficiente per t. La g è detta funzione di modulazione ed è tale
che −1 ≤ g ≤ +1, mentre A è, in generale, una funzione della direzione di
propagazione r̂ ed è detta ampiezza dell’onda. Risolvendo l’equazione si
ha che i termini ω 2 ,k 2 e v 2 devono soddisfare alla seguente relazione detta
relazione di dispersione:
(1.13)
(1.14)
ψ(r, t) =
ω2
= v2
k2
Vediamo ora due tipologie di soluzione:
(1) Soluzione in forma di onde piane:
• u = k · r ± ωt che è l’equazione affine di un piano.
• A costante rispetto a qualsiasi direzione di propagazione.
• α=0
Impostando i parametri a questo modo la ψ che abbiamo espresso è soluzione dell’equazione delle onde per ogni f funzione di
modulazione abbastanza regolare.
(2) Soluzione in forma di onde sferiche:
• u = |k||r| ± ωt equazione di una sfera nello spazio.
• A costante.
• α=1
Impostando i parametri a questo modo la ψ che abbiamo espresso è soluzione dell’equazione delle onde per ogni f funzione di
modulazione abbastanza regolare.
Nota 1. L’esperienza ci dice, o almeno dovrebbe dirci, che in natura esistono
anche delle onde cilindriche, con una funzione u = |k||r⊥ |±ωt, dove r⊥ è la
distanza misurata rispetto all’asse centrale del cilindro, con una A costante
e un α = 1/2, tuttavia con questi parametri non otteniamo una soluzione
dell’equazione di D’Alambert5. Questo ci pone davanti al fatto che non
tutte le onde sono soluzioni dell’equazione delle onde, questa ne rappresenta
solo una determinata tipologia. Tratteremo le onde cilindriche con maggior
dettaglio più avanti.
Nota 2. Sia l’onda piana che l’onda sferica sono soluzioni a un grado di
libertà, cioè possono essere descritte attraverso un solo parametro variabile,
questo a patto di porci nell’opportuno sistema di riferimento.
5Provare per credere...
1. LA SOLUZIONE DELLE EQ. DI MAXWELL: L’EQUAZIONE DELLE ONDE
37
Pur non ricavando esplicitamente le soluzioni che abbiamo dato verifichiamo,
almeno, che quella delle onde piane lo sia:
∂2f
∂ ∂f
d2 f 2
∂ ∂f ∂u
(1.15)
=
=
=
k
k
x
∂x2
∂x ∂u ∂x
∂x ∂u
du2 x
∂2f
d2 f 2 ∂ 2 f
d2 f 2
=
k
e
=
k , ci
∂y 2
du2 y ∂z 2
du2 z
resta da verificare per la coordinata tempo:
∂ ∂f
∂2f
∂ ∂f ∂u
d2 f
=
(1.16)
=
(±ω) = 2 ω 2
∂t
∂t ∂u ∂t
∂t ∂u
du
Similmente per le altre due coordinate:
ricomponendo l’equazione abbiamo:
d2 f 2 ω 2
k − 2 =0
(1.17)
du2
v
| {z }
ω2
=v 2
k2
ovvero, se la f è almeno derivabile due volte abbiamo che la ψ associata alle
onde piane è soluzione dell’equazione delle onde.
1.1. Rappresentare le onde. Un modo, piuttosto utile, per rappresentare le onde è quello di fissare tutti i luoghi dello spazio-tempo in cui la
f è costante, cioè tutti i luoghi in cui la u assume lo stesso valore, infatti
si ha che f (u) = cost ⇔ u = cost, cioè k · r ± t̄ = cost (con un valore di t
fissato), cioè l’insieme dei luoghi in cui k · r è costante, ma, come abbiamo
già osservato, questa è l’equazione di un piano π ⊥ k · r, abbiamo ottenuto
delle superfici d’onda piane. Fissiamo l’asse x del nostro sistema di riferi∂
∂
mento in modo che x̂ = k̂, in questo modo i termini in ∂y
e ∂z
spariscono
dall’equazione. Osserviamo, incidentalmente, che l’energia trasportata dall’onda è rappresentata dal quadrato della sua ampiezza, che in questo caso è
costante su ogni piano per un x fissato. Restringiamoci, ora, ad una funzione
di modulazione g unidimensionale, cioè funzione della sola x, siamo interessati a scoprire se esiste un tempo ∆t per cui la g∗ = g(x∗ , t∗ ) = g(x, t + ∆t),
se vogliamo continuare a lavorare in ipotesi di generalità della g, questo è
verificato se e solo se:
ω
(1.18) kx x∗ ±ωt∗ = kx x±ωt∗ ±ω∆t ⇔ kx (x∗ −x) = ±ω∆t ⇔ ∓ ∆t = ∆x
kx
ma avevamo visto che ω/kx = v, cioè abbiamo ∆x = ∓v∆t, abbiamo scoperto quindi che esiste un moto rigido traslatorio che ”propaga” il valore della
funzione calcola in un arbitrario punto x ad un tempo fissato t.
L’equazione delle onde ricorda molto l’equazione del calore, o equazione
di Fourier, che è un caso particolare dell’equazione generale 1.10, ovvero
quello in cui sono zero i coefficienti dei termini di grado 2 e 0, mentre quello
di grado 1 è uguale a 1/v, cioè:
1 ∂ψ
=0
v ∂t
che non ha, tuttavia, una famiglia di soluzioni come l’equazione delle onde.
Osserviamo che in particolare se ψ(r, t) è soluzione dell’equazione di D’Alambert, allora, necessariamente, anche ψ(r, −t) lo è, cioè i fenomeni ondulatori
(1.19)
∇2 ψ −
38
2. ELETTROMAGNETISMO: IL CASO NON STAZIONARIO
sono reversibili. Per quanto riguarda l’equazione di Fourier, si ha che se
ψ(r, t) è soluzione, ψ(r, −t) non lo è, infatti questa equazione rappresenta il
fenomeno di propagazione del calore, che non è reversibile.
Nota 3. ψ(r, t) è un campo definito su tutto lo spazio, può descrivere, in
generale, qualunque tipo di grandezza fisica. Possiamo sempre guardarne
le superfici isotimiche6 senza conoscere la forma esplicita della funzione di
modulazione g, ci basta imporre che la u sia costante, cioè che la fase sia
costante.
Rappresentiamo nelle due figure seguenti le superfici d’onda piane e
sferiche, introduciamo la distinzione tra onda progressiva e regressiva:
Se v > 0, cioè se nell’espressione della u compare −ωt, l’onda si dice pro-
Figura 6. Fronti d’onda
gressiva, se v < 0, cioè se nell’espressione della u compare ωt, l’onda si dice
regressiva.
Le Onde Cilindriche. Come avevamo già accennato per le onde
p cilindriche dobbiamo considerare i parametri dati da u = kr∗ ±ωt con k x2 + y 2 =cost,
dove r∗ si intende il modulo la proiezione del vettore posizione r su di un piano ortogonale all’asse del cilindro. Per rendere coerente questo problema è
necessario considerare una funzione A, questa volta non costante, che tenga
conto della dipendenza angolare del problema. Ovvero, serve una funzione
A tale che la fase ”si richiuda”, ovvero tale che la funzione g non assuma due
valori diversi nello stesso punto. La funzione opportuna A è detta funzione
di Bessel, di cui si considera abitualmente uno sviluppo in serie troncato ad
un ordine coerente col tipo di problema.
Teorema 1.1. Data un’equazione delle onde della forma (in una dimensione):
1 ∂2ψ
= −s(r, t)
v 2 ∂t2
abbiamo che la soluzione associata della forma:
A(r̂)
(1.21)
ψ(r, t) = α g(u − u0 )
r
(1.20)
∇2 ψ −
6Le superfici su cui la funzione è costante.
1. LA SOLUZIONE DELLE EQ. DI MAXWELL: L’EQUAZIONE DELLE ONDE
39
ha una g determinata, in un fissato sistema di coordinate, quando sono date
le sei condizioni iniziali:
ψ(r, 0) ψ̇(r, 0)
˙ t)
(1.22)
ψ(A, t) ψ(A,
˙ t)
ψ(L, t) ψ(L,
Nota 4. Aumentare il numero di dimensioni aumenta il numero di parametri
necessari a determinare l’onda.
Nota 5. Questo problema è lineare, possiamo dunque applicare il principio
di sovrapposizione, cioè ha senso tenere conto di combinazioni lineari di
soluzioni del problema.
Vediamo ora due esempi di propagazione di quantità fisiche per onde,
prima di dedicarci a quelle elettromagnetiche. Consideriamo in primo luogo
la propagazione di un campo scalare per onde, supponiamo di aver
un cilindro, pieno d’aria, con un pistone mobile. Dare un impulso al cilindro fa sı̀ che la distribuzione di densità dell’aria interna ad esso si modifichi
aumentando al fondo corsa del pistone e diminuendo all’inizio. Quando retraiamo il pistone, l’aria tenderà a tornare ad occupare il resto del pistone
in modo omogeneo, questo fa sı̀ che dopo un ∆t tempo la zona di addensamento si sia spostata dalla posizione originaria. Abbiamo costruito un’onda
di rarefazione. Per il secondo esempio prendiamo a prestito un fenomeno
dalla meccanica, consideriamo due corde, una legata per un estremo ad un
sostegno e poi lasciata libera all’altro, ed una legata ad entrambi gli estremi
a due sostegni diversi. Dare un colpo di frusta alla prima, o pizzicare la seconda, genera due fenomeni diversi. Nel primo caso otteniamo che l’impulso
verticale dato alla frusta si propaga fino al termine della corda producendo
uno schiocco, nel secondo, invece, detta L la lunghezza della corda, abbiamo
posto che ψ(0, t) = ψ(L, t) ∀t, cioè abbiamo creato un’onda stazionaria.
Attenzione 1. Non bisogna confondere il fenomeno delle onde con quello
del moto armonico! In un fenomeno ondulatorio non c’è trasporto di
materia tra un punto e l’altro dello spazio, le particelle oscillano intorno
ad un loro punto di equilibrio.
Un’onda tipica, infatti, rappresenta lo spostamento di una particella dal
suo punto di equilibrio, questo può avvenire sostanzialmente in due modi:
Definizione 1.1. Si chiama onda trasversale un’onda in cui lo spostamento delle particelle attorno all’equilibrio avviene in modo puramente ortogonale alla direzione di propagazione dell’onda, si chiama onda longitudinale quando lo spostamento delle particelle attorno all’equilibrio è
puramente parallelo alla direzione di propagazione dell’onda.
La differenza di comportamento tra onde trasversali ed onde longitudinali è fortemente indicativa delle proprietà del mezzo attraverso cui queste
si propagano. L’esempio classico che si può fare in tal senso è quello dei
terremoti, in questo caso siamo in presenza di onde di tre tipi, le onde di
superficie e le onde di volume, all’interno della terra, che dividiamo in onde
di compressione, ovvero onde longitudinali, dette onde primarie ed in onde
di taglio, ovvero onde trasversali, dette onde secondarie. In generale si ha
che vp > vs , ovvero che le onde primarie sono più veloci delle secondarie.
40
2. ELETTROMAGNETISMO: IL CASO NON STAZIONARIO
Definizione 1.2. Un’onda per cui ψ e k sono contenuti in un piano costante
è detta polarizzata linearmente.
Definizione 1.3. Un’onda per cui il piano che contiene ψ ruota con velocità angolare ω costante attorno alla direzione di propagazione k si dice
polarizzata circolarmente, a destra o a sinistra a seconda dei versi di
rotazione e della progressività/regressività dell’onda.
Vediamo ora un caso particolare determinando una forma particolare
per la funzione di modulazione g, consideriamo per essa un’espressione goniometrica, come cos(u − u0 ) o sin(u − u0 )7, all’interno di questa classe
consideriamo il caso di un’onda piana progressiva monocromatica, ovvero
una ψ = A cos(k · r − ωt), andiamo ad analizzarne le proprietà. Ricaviamo
in primo luogo il periodo, ovvero quella quantità T tale che ψ(t) = ψ(t+T )
∀t per una direzione di propagazione k fissata:
(1.23)
cos(k · r − ωt) = cos(k · r − ωt − ωT )
k · r − ωt = k · r − ωt − ωT + 2π
2π
ωT = 2π ⇔ ω =
= 2πν
T
ora possiamo imporre ωT = kλ cioè λ = ω/kT , ovvero possiamo avere:
(1.24)
cos((k̂ · r)|k| − ωt − |k|λ) = cos([(k̂ · r) − λ]k − wt) = cos(k · r − ωt)
cioè λk = 2π, ovvero λ = 2π/k, abbiamo a questo punto introdotto un certo
numero di quantità che è bene definire:
• T periodo (s);
• ν = T −1 frequenza (Hz);
2π
= 2πν pulsazione (rad/s);
• ω=
T
• λ = T v lunghezza d’onda (m), rappresenta la periodicità spaziale
lungo una fissata direzione k;
2π
• k=
numero d’onda (rad/m), numero di fronti d’onda in 2π−metri.
λ
2. Onde elettromagnetiche
Torniamo ora all’elettromagnetismo, avevamo trovato che il potenziale
vettore e il potenziale scalare soddisfacevano alla coppia di equazioni 1.9, cioè
a quella che abbiamo chiamato un’equazione di D’Alambert non omogenea,
con un j 6= 0 e un ρ = 0, ovvero con una sorgente che esiste solo in un
determinato momento di tempo. Possiamo scegliere φ = 0 e abbiamo una
soluzione per:
(2.1)
∇2 A −
1 ∂2A
= −µ0 j
c2 ∂t2
7Questa scelta non è in realtà del tutto arbitraria, essendo la ψ una funzione periodica
di classe almeno C 2 , potrei sempre considerarne lo sviluppo in serie di Fourier e ridurmi a
lavorare sulle armoniche principali sin e cos.
2. ONDE ELETTROMAGNETICHE
41
prendendo un A = a cos(k · r − ωt), per cui vale:
∂A
(2.2)
= −akx sin(k · r − ωt)
∂x
∂A
= aω sin(k · r − ωt)
(2.3)
∂t
Dalla gauge di Lorentz, o equivalentemente da quella di Coulumb, abbiamo
che ∇·A = 0 , ovvero che kx Ax + ky By + kz Az = 0 ovvero A ⊥ k, avendo
scelto φ = 0 per il campo elettrico ci riduciamo a:
∂A
(2.4)
E=−
kA
∂t
mentre per il campo magnetico abbiamo:
k
(2.5)
B = ∇×A = (k × a) sin(kr − ωt) = × E
ω
Ovvero abbiamo ottenuto la relazione tra campo elettrico e magnetico data
da:
E
(2.6)
|B| =
⇔ E = cB
c
La disposizione tra il campo magnetico e quello elettrico trasportati dall’onda è dunque quella di una terna ortogonale, come rappresentato in figura
7. Prima di proseguire ulteriormente lo studio delle onde elettromagnetiche
Figura 7. Disposizione campo Elettrico e Magnetico
trasportati da un’onda
è necessario analizzare il comportamento dei fenomeni elettromagnetici in
generale in presenza di materiali.
CAPITOLO 3
Elettromagnetismo in presenza di materiali
Procederemo considerando tutti i materiali in oggetto come isotropi ed
omogenei, separeremo tutte le volte in cui avrà senso farlo il caso stazionario
dal campo tempo dipendente.
Cominciamo dall’imporre delle condizioni di continuità sul passaggio del
campo elettromagnetico da un materiale all’altro attraverso una superficie
di separazione S regolare. Iniziamo col mostrare che: nel passaggio da una
superficie ad un’altra la componente tangente del campo elettrico si conserva.
Consideriamo un circuito infinitesimo attorno ad un punto della superficie
S, costruito con due lati paralleli e due ortogonali ad essa, in modo che
i lati ortogonali sia infinitesimi di ordine superiore rispetto a quelli paralleli, ci troviamo quindi nella situazione della figura 1. Calcoliamo ora la
Figura 1. Continuità E al passaggio tra materiali diversi
circuitazione di E lungo questo percorso, abbiamo che:
I
(0.7)
Edl = Edl1 + Edl2 + Edl3 + Edl4 = (−E k,1 + E k,2 )dl
|
{z
}
trascurabili
dalle eq. di Maxwell per il caso stazionario abbiamo che questo integrale è
uguagliato a zero, dunque abbiamo ottenuto la prima relazione di continuità
desiderata:
(0.8)
E k,1 = E k,2
osserviamo che quanto appena mostrato per le componenti tangenti non può
essere mostrato per quelle ortogonali. Mostriamo ora l’analogo per il campo
magnetico, ovvero che nel passaggio da un mezzo ad un altro la componente
ortogonale del campo magnetico si conserva. Sfruttando una strategia simile
al caso precedente, consideriamo un elemento infinitesimo di superficie approssimabile con un parte di piano, costruiamo un cilindretto infinitesimo Σ
43
44
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
a metà tra i due materiali e passante per la porzione infinitesima di superficie (vedi figura 2), vogliamo calcolare ora il flusso di B attraverso questa
Figura 2. Continuità di B al passaggio tra materiali diversi
superficie Σ sfruttando il fatto che ∇·B = 0, quindi:
(0.9)
0 = φΣ (B) = φ1 (B) + φ2 (B) + φL (B) = B ⊥,1 d2 x − B ⊥,2 d2 x + 0
avendo considerando il dh dell’altezza del cilindro di un infinitesimo di ordine
superiore rispetto a quelli dei raggi delle basi, abbiamo cosı̀ ottenuto la
seconda delle relazioni cercate, ovvero che:
(0.10)
B ⊥,1 = B ⊥,2
in modo completamente simmetrico al caso precedente anche in questo caso
non si può dire nulla sulla componente tangenziale alla superficie S.
Procediamo ora ad una classificazione dei mezzi secondo le loro proprietà
rispetto al campo elettrico e al campo magnetico. Per quanto riguarda il
campo elettrico abbiamo:
Conduttori: sono materiali in cui gli elettroni hanno ampia libertà
di movimento all’intero, possono scorrere ”sopra” i livelli più alti
degli atomi.
Isolanti: gli elettroni sono localizzati attorno ad ogni nucleo, al più
sono presenti degli elettroni di legame e qualche ione. Sostanzialmente non ci sono elettroni liberi di muoversi.
Per quanto riguarda i materiali sensibili al campo magnetico abbiamo la
divisione in:
• Diamagnetici
• Paramagnetici
• Ferromagnetici
che possiamo grossolanamente dire ordinati in ordine di sensibilità e risposta
agli effetti del campo di induzione magnetica B.
1. Carica di un conduttore
Supponiamo di avere un conduttore sferico caricato con una carica positiva +q, poniamo vicino a questo, ma non in contatto, un secondo conduttore
cilindrico scarico con le basi formate da semisfere, per effetto del campo
elettrico generato dalla sfera abbiamo che gli elettroni liberi del cilindro si
1. CARICA DI UN CONDUTTORE
45
spostano verso il conduttore sferico scoprendo delle cariche positive dal lato opposto. Questo campo interagirà con quello della sfera e modificherà
ulteriormente il campo totale fino a raggiungere una situazione d’equilibrio. Abbiamo costruito in questo modo un dipolo elettrico all’interno del
cilindro per effetto dell’induzione elettrica. I campi elettrici all’interno
dei conduttori, se si è raggiunta la condizione di equilibrio, devono essere
necessariamente E(D) = ρ(D) = 0, ∀D dominio in essi contenuto, questo
implica a sua volta che il potenziale del campo elettrico è conservato tutto
sulla superficie dei conduttori ed è costante. Abbiamo quindi ottenuto il
seguente risultato:
Fatto 2. Un conduttore può essere caricato, ma tutte le cariche si distribuiscono sulla superficie del conduttore dove il potenziale è costante, mentre il
campo elettrico interno è 0 e la distribuzione di carica interna è 0.
Dopo aver caricato il conduttore siamo interessati ad indagare il campo
elettrico generato. Supponiamo di avere una carica +q su di un conduttore
sferico e di voler calcolare il campo elettrico in una posizione r dello spazio.
Consideriamo una superficie infinitesima della sfera e costruiamo la solita
superficie cilindrica metà all’interno e metà all’esterno del conduttore (vedi fig. 3), vogliamo ora calcolare il flusso infinitesimo del campo elettrico
Figura 3. Campo E generato da un conduttore
attraverso il cilindro. Osserviamo in primo luogo che la componente di E
lungo dh deve essere nulla, se cosı̀ non fosse le cariche si metterebbero in
moto lungo la superficie, quindi dobbiamo considerare solo il flusso nelle
direzioni della base, ma per la base inferiore questo è ancora zero. Infatti,
come abbiamo appena osservato, non c’è campo elettrico dentro la sfera,
dunque c’è solo il flusso attraverso la superficie esterna:
(1.1)
E n̂d2 x = σ
|E| = εσ0
d2 x
⇒
E = εσ0 n̂
ε0
Il campo è il gradiente del potenziale, dunque ∇φ ⊥ S, che è una superficie
equipotenziale (cioè su cui φ è costante). Poiché vogliamo un potenziale
che vada a zero all’infinito, siamo costretti a far si che il potenziale sia
proporzionale alla carica posta sul conduttore, se cosı̀ non fosse potrei sempre
aggiungere la costante arbitraria del potenziale per avere un φ costante
46
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
ovunque1, volendo avere un grafico del potenziale e della distanza saremmo
in questa situazione:
Figura 4. Potenziale di estrazione
Introduciamo a questo punto la definizione di capacità di un conduttore come il coefficiente di proporzionalità tra la carica q e il potenziale φ
a cui è portato il conduttore contenente la suddetta carica, ovvero:
q
1
(1.2)
q = Cφ ⇔ C = ⇔ φ = q
φ
C
la cui unità di misura è il Farad.
Calcoliamo la capacità per alcuni conduttori particolari, supponiamo
di avere un conduttore sferico con una distribuzione di carica superficiale
q
σ = 4πR
2 , dove R è il raggio della sfera, abbiamo già mostrato che questa
va ad un potenziale:
1 q
(1.3)
φ(r ≥ R) =
4πε0 r
cioè, sfruttando la relazione introdotta nell’eq. 1.2 abbiamo che:
1
(1.4)
φ(R) =
q
4πε R
| {z0 }
1
C
dunque C = 4πε0 R è la capacità della sfera. Supponiamo che la sfera abbia
raggio R = 1/4π, in questo caso la capacità si riduce ad essere ε0 , abbiamo
quindi ottenuto una nuova interpretazione per la costante dielettrica del
vuoto:
(1.5)
ε0 = 4.8pF/m
Il potere dispersivo delle punte. Supponiamo di aver costruito il
seguente dispositivo, due sfere cariche collegate di raggio R1 ed R2 che collegheremo con un filo sottile che non perturba le linee di campo. Poniamo
sulla prima sfera, di capacità C1 una carica q1 questa farà si che la sfera
si porti al potenziale φ1 , similmente carichiamo la seconda sfera, di capacità C2 , con una carica q2 , questa andrà ad un potenziale φ2 (vedi fig.
5), colleghiamo a questo punto il filo, questo farà sı̀, che dopo un tempo
opportuno, si possa imporre:
(1.6)
φ1 = φ2 = φ =
1Perderei lo 0 all’infinito.
q
q1
q2
4πR12 σ1
4πR22 σ2
=
=
=
=
C
C1
C2
4πε0 R1
4πε0 R2
1. CARICA DI UN CONDUTTORE
47
Figura 5. Effetto punta
ovvero che:
σ1
R2
=
σ2
R1
che a sua volta implica |E 2 | > |E 1 |, ovvero le punte disperdono un campo
elettrico maggiore.
Pressione elettrostatica. Consideriamo una sfera cava di un materiale
conduttore, ad esempio dell’alluminio, poniamo al disopra una carica q,
questa si distribuirà sulla superficie del conduttore, siamo interessati alle
modifiche macroscopiche subite dall’oggetto. Un punto infinitesimo della
sfera subirà una forza F = σd2 x · E ∗ dove E ∗ = E − E q , con E q campo
elettrico generato dalla carica nel punto in esame ed E il campo elettrico
generato da tutte le altre cariche sul punto in esame. Ad ogni punto interno
della sfera si affaccia un altro punto antipodale, dunque il campo elettrico
interno si somma punto per punto con il suo opposto ed è globalmente nullo.
Dunque E ∗ = σ/2ε0 , ovvero abbiamo trovato la seguente espressione per la
F:
(1.7)
σ2 2
σ2
d x⇒F =
2ε0
2ε0
chiamiamo questa forza: pressione elettrostatica.
Proprietà di linearità. Poiché tutte le espressioni dei potenziali sono
lineari nelle cariche possiamo scrivere:
ϕ1 = a11 q1 + a12 q2 + · · · + a1n qn
ϕ2 = a21 q1 + a22 q2 + · · · + a2n qn
(1.9)
..
..
.
P .
ϕ =
i
j aij qj
P
che induce sulle capacità qi = j Cij φi , dove i Cij sono detti coefficienti
di capacità. Supponiamo di avere due conduttori sferici S1 ed S2 ad una
distanza fissata tra di loro, il primo con una carica q1 ed il secondo con una
carica q2 , se vogliamo scrivere il sistema per i loro potenziali otteniamo:
ϕ1 = a11 q1 + a12 q2
(1.10)
ϕ2 = a21 q1 + a22 q2
(1.8)
dF =
le costanti a dipendono fortemente dalla geometria del sistema, in questo, infatti, se consideriamo una superficie sferica immaginaria attorno ad S1 e andiamo a calcolare il flusso del campo elettrico generato dalla sfera attraverso
questa superficie otteniamo, dal teorema di Gauss, che ΦS1 (E 1 ) = Qtot /ε0 ,
48
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
tuttavia non tutte le linee di campo che escono dalla prima sfera entrano nel
secondo conduttore, come invece avverrebbe se considerassimo due conduttori sferici l’uno dentro l’altro. Messa una carica +q sul conduttore interno
1 (vedi fig. 6) questa genera un campo elettrico sulla superficie della sfera
Figura 6. Induzione Completa
1 le cui linee di campo attraversano in uscita la superficie fittizia S1 ed in
entrata la superficie fittizia S2 , ovvero si induce un campo di carica −q sulla
superficie interna della sfera 2. Dopo che questo è avvenuto, il si ha che il
campo elettrico tra le due sfere è nullo, che, a sua volta, implica che il campo
all’interno del conduttore 2 è nullo. Per vederlo è sufficiente ”gonfiare” la
superficie S2 fino ad entrare all’interno del conduttore 2, nessuna linea di
campo la attraversa, quindi non c’è campo. Sulla faccia esterna del conduttore 2 si distribuisce una carica elettrica +q, se colleghiamo ad un punto
a potenziale 0 questa faccia, idealmente all’infinito, possiamo portare via
questa carica ottenendo un campo elettrico nullo all’esterno delle due sfere.
In questo modo abbiamo costruito un processo di induzione completa2-.
Abbiamo costruito quello che si chiama un condensatore, di cui possiamo
scrivere la coppia di equazioni per i potenziali:
ϕ1 = a11 q − a12 q
(1.11)
ϕ2 = a21 q − a22 q
ovvero V = ϕ1 − ϕ2 = (a11 − a12 + a21 − a22 )q, cioè possiamo scrivere:
(1.12)
q=
ϕ1 − ϕ2
= CV
a11 − a12 + a21 − a22
Raccogliamo nella seguente tabella le caratteristiche dei tipi più comuni di
condensatori:
2Osserviamo inoltre che, prima di scaricare la faccia esterna, il campo elettrico generato da queste due sfere, visto unicamente dall’esterno, è indistinguibile da quello generato
da una sfera piena su cui sia posta una carica +q.
1. CARICA DI UN CONDUTTORE
Tipo di Condensatore
Piano
E
σ
n̂
ε0
V
Qd
ε0 S
Sferico
Qr̂
4πε0 r2
Q(R2 − R1 )
4πε0 R1 R2
49
C
ε0 S
d
4πε0
R1 R2
R2 − R1
λr̂
Q
1
R2
2πε0 l
ln
2πε0 r
2πε0 l R1
ln(R2 /R1 )
Diversi condensatori possono essere attaccati tra di loro sostanzialmente nei
modi indicati nella figura 7, ovvero in parallelo ed in serie, nel primo
Cilindrico
Figura 7. Condensatori in Parallelo ed in Serie.
caso la differenza di potenziale tra le armature di ciascun condensatore è
uguale,P
quindi Vi = V ∀i = 1, . . . , n, dunque q = q1 + q2 + · · · + qn ovvero
q = V ni=o Ci , mentre nel secondo caso è la carica, a parte il segno, sulle
piastre di ciascun condensatore
ad essere uguale, dunque: qi = q ∀i =
P
1, . . . , n, dunque V = q ni=0 Ci−1 .
Caricare il condensatore attraverso il processo dell’induzione completa
richiede un lavoro, il cui incremento infinitesimo può essere scritto come
dL = V (q)dq, ovvero dopo aver posto la prima carica, che come abbiamo
già visto è a lavoro nullo, dobbiamo per portare ogni nuova carica, compiere
un lavoro per portarla al potenziale V (q) generato da tutte le precedenti,
tenendo conto delle relazioni appena esposte per il condensatore:
Z Q
Z Q
q
11 2 1
1
dq =
Q = QV = CV 2
(1.13)
L=
V (q)dq =
2C
2
2
0
0 C
Il lavoro che abbiamo utilizzato resta immagazzinato nel dielettrico tra le
piastre del condensatore sotto forma di energia, possiamo vederlo facilmente
nel caso del condensatore piano, infatti:
(1.14)
1 S σ 2 d2
1 σ2
L = ε0
=
(Sd)
2 d ε20
2 ε0
mentre se scriviamo l’espressione per l’energia otteniamo:
(1.15)
1
1 σ2
1 σ2
u = ε0 E 2 = ε 0 2 =
2
2 ε0
2 ε0
che integrata su tutto il volume contenuto tra le piastre da:
(1.16)
U=
1 σ2
(Sd) = L
2 ε0
Questo implica che le piastre sentono una forza che le spinge ad attrarsi tra
loro, essendo di carattere prettamente superficiale, piuttosto che la forza è
50
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
interessante indagare la pressione, infatti:
(1.17)
p=
Fx
σ2
1
σ
=
= σS
S
S
2ε0
2ε0
che è esattamente ∂U/∂x/S.
Possiamo a questo punto mettere in piedi un parallelismo tra i processi
termodinamici e quelli di carica di un condensatore. Ricordiamo in primo
luogo il primo principio della termodinamica:
(1.18)
dU = ∂L + ∂Q
dove U rappresenta l’energia interna del sistema, L il lavoro meccanico compiuto dalle parti del sistema e Q il calore da esso scambiato, che è semplicemente lavoro sotto di un’altra forma, per quanto riguarda il condensatore
possiamo dare la seguente analoga espressione:
(1.19)
dU = Le + Lm
dove indichiamo con Le il lavoro elettrico ed Lm il lavoro meccanico. In
entrambi i casi, quello termodinamico e quello elettrico, la forma delle due
energie interne dipende fortemente dalla trasformazione termodinamica, nel
primo caso, dal processo di carica del condensatore, nel secondo. Sfruttando quanto abbiamo appena detto sul lavoro e sulla pressione elettrostatica
possiamo scrivere che, nel caso elettrico:
(1.20)
dU = V (q)dq +
σ2S
dl
2ε0
Nel caso in cui manteniamo fisso il potenziale e non variamo la distanza3
tra le piastre del condensatore, in questo caso stiamo sfruttando solo il lavoro elettrico compiuto dal generatore per immagazzinare l’energia elettrica
tra le piastre del condensatore ovvero, volendo lavorare nella nostra analogia termodinamica, stiamo compiendo una trasformazione senza variazione
di volume in modo che il lavoro meccanico pdV sia nullo. In questo caso
l’espressione del lavoro resta quella calcolata nell’espressione ??. Il caso
analogo è quello in cui, fissata la carica Q sulle piastre del condensatore,
aumentiamo (riduciamo) la distanza tra queste. In questo caso, lavorando sempre nell’analogia, stiamo variando il volume contenuto tra le piastre,
dunque stiamo compiendo solo lavoro meccanico, ovvero siamo nel caso che
abbiamo calcolato con la relazione ??, lavoro elettrico (analogo al calore)
nullo. Ci resta da controllare un ultimo caso, quello in cui abbiamo sia presenza di lavoro meccanico, sia presenza di lavoro elettrico. Supponiamo di
collegare il nostro condensatore ad un generatore di differenza di potenziale,
non appena chiudiamo il circuito cominciamo anche a far variare la distanza
tra le piastre del condensatore4, detta x la coordinata ortogonale alle piastre
3Mi riduco al caso di condensatori piani, si potrebbe lavorare in tutta generalità
modificando di volta in volta in modo opportuno l’integrale del lavoro meccanico Lm , ma
non facciamoci del male gratuitamente.
4Se la variazione è di avvicinamento o allontanamento cambia solo il segno del lavoro
meccanico, facciamo tutti i conti con il segno +. Inoltre evitiamo di far toccare le piastre
del condensatore mandando tutto in cortocircuito.
2. MAGNETIZZAZIONE, ELETTRIZZAZIONE E POLARIZZAZIONE DELLA MATERIA
51
lungo cui calcoliamo la variazione di posizione, possiamo scrivere la relazione
differenziale come:
σ 2 (x)S
1 Q2 (x)
dU =V (q)dq +
dx = V 2 dC +
Sdx =
2ε0
2ε0 S 2
1 C 2 (x)V 2
1 ε20 S 2 V 2
(1.21)
=V 2 dC +
dx =
dx = V 2 dC +
2ε0
S
2ε0 Sx2
V 2 ε0 S 1
=V 2 dC +
dx
2 x2
possiamo, a questo punto, procedere all’integrazione mettendo come estremi
la capacità finale e quella iniziale, che in ultima analisi sono funzioni di x,
la distanza finale e quella iniziale, in questo modo otteniamo:
(1.22)
Z
Z Cf
V
1
1
V 2 ε0 S xf dx
2
=
V
(C
−
C
)
+
−
=
dC +
U =V 2
i
f
2
2
2 xi xf
xi x
Ci
1
1
1
V 2 ε0 S 1
1
1
1
= V 2 ε0 S
−
−
=V 2 ε0 S
+
−
=
xf
xi
2
xi xf
2
xf
xi
1
= V 2 ∆C
2
abbiamo quindi trovato un’espressione per l’energia interna nel caso misto
per un condensatore piano. In realtà ci potrebbe venire in mente di caricare
il condensatore in un altro modo, di cui daremo solo questo accenno, in tutti
e tre i casi si può considerare di muovere un oggetto carico tra le piastre del
condensatore e calcolare la variazione di energia che questo provoca.
2. Magnetizzazione, elettrizzazione e polarizzazione della materia
Cominciamo col trattare cosa avviene per un singolo atomo di idrogeno,
assumiamo di essere nella situazione della figura 8, ovvero di avere un atomo
di idrogeno con un nucleo carico +e ed un elettrone in orbita attorno ad
Figura 8. Atomo di Idrogeno
esso di carica −e, dovremmo considerare, per studiare il moto dell’elettrone
attorno al nucleo, la massa ridotta µ = (mp me )/(mp + me ), tuttavia poichè
la massa dell’elettrone è trascurabile rispetto a quella del protone, cioè la
52
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
massa dell’elettrone non sposta al di fuori del protone il polo di rotazione,
consideriamo µ ' me , consideriamo inoltre la traiettoria del moto come
circolare, fatte queste semplificazioni la forza che agisce sull’elettrone è data
da:
(2.1)
F = mω02 r0 =
1 e2
4πε0 r02
per cui possiamo scrivere la lagrangiana come:
(2.2)
1
1
1 e2
Et = T − U = me w02 r02 −
= u
2
4πε0 r0
2
a cui possiamo associare il momento angolare costante dato da l = r0 ×mv0 =
r0 mv0 n̂ = me ω0 r02 n̂, a cui associamo una corrente i = −e/T0 ' 1mA e
quindi associamo il momento magnetico dato da:
(2.3)
m0 = πr02
−e
−er02 ω0
n̂ =
n̂ = g0 l
T0
2
dove definiamo g0 , coefficiente giromagnetico orbitale, come:
e
(2.4)
g0 = −
2me
tuttavia, questo valore teorico, non coincide con le misurazioni di questo
fenomeno. Il problema è aver tralasciato una parte del moto dell’elettrone,
ovvero lo spin5, tuttavia questo esula dalla fisica classica e dalla nostra
trattazione.
Supponiamo, considerando comunque di star tralasciando parte del fenomeno,
di aggiungere un campo elettrico E parallelo ad n̂, la Forza di Coulumb, deve
a questo punto equilibrare la forza centripeta e la forza prodotta dal campo elettrico E sul nucleo (vedi fig. 9), che, che se globalmente neutro, ha
un momento di dipolo elettrico p 6= 0. Questo ha spostato il baricentro
delle cariche, nasce quindi un momento di dipolo magnetico che possiamo
Figura 9. Atomo di Idrogeno con Campo Elettrico
decomporre come p = p⊥ + pk rispetto ad n̂, poiché per ogni posizione di
5Gli elettroni si comportano come delle ”trottole” cariche.
2. MAGNETIZZAZIONE, ELETTRIZZAZIONE E POLARIZZAZIONE DELLA MATERIA
53
e sull’orbita esiste quella opposta e queste sono successivamente tutte occupate dall’elettrone, abbiamo che: p⊥ = 0, dunque < pk >=< p >6= 0,
possiamo a questo punto scrivere le equazioni del moto per il sistema come:
1 e2 δ
Fc cos θ = eE
eE =
(2.5)
−→
4πε0 r2 r
Fc sin θ = −meω 2 r0
Fc sin θ = −meω 2 r0
per dei campi elettrici E non troppo intensi, possiamo esprimere r = [r02 +
1
δ 2 ] 2 ' r0 e riscrivere la prima delle due equazioni come:
(2.6)
eE =
1 e2 δ
⇒ eδ = 4πε0 r03 E
4πε0 r03
possiamo quindi riconoscere nella quantità eδ il momento di dipolo, infatti,
detto φ l’angolo di rotazione attorno all’asse n̂:
(2.7)
0 6=< p >=< pk >=< er cos θ > + < er sin θ cos φ > = er < cos θ >= eδ
{z
}
|
=0
abbiamo cioè mostrato che un atomo di idrogeno in un campo elettrico genera un momento di dipolo elettrico proporzione al campo in cui è inserito,
infatti p = 4πε0 r03 E = αD E, dove αD è detto coefficiente di polarizzabilità elettrica. Per tutti gli atomi di un materiale il momento di dipolo
è equiorientato, dunque il valore medio di p su tutto il materiale è diverso
da zero.
Ripetiamo quanto fatto per il campo elettrico con il campo magnetico.
Aggiungiamo al sistema non perturbato un campo di induzione magnetica
B, questo genererà una forza di Lorentz che perturberà il moto dell’elettrone nell’orbita, ora se B k m0 dobbiamo aggiungere la F L a quella di
Coulumb, se è antiparallelo, sottrarla, questo modifica l’equazione del moto
nel seguente modo:
(2.8)
mω 2 r0 =
1 e2
± evB
4πε0 r02
usando la stessa espressione per ω e per v, cioè esprimendo tutto in funzione
di ω otteniamo:
(2.9)
mω 2 r0 =
1 e2
± eωr0 B
4πε0 r02
ovvero, semplificando, otteniamo la seguente eq. di secondo grado in ω:
e
(2.10)
ω 2 ∓ ωB − w02 = 0
m
definiamo:
Definizione 2.1. Si dice velocità di precessione la quantità:
(2.11)
Per B << ω0
ωL =
eB
2m
54
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
in questo modo, scartando la soluzione negativa che farebbe saltare
l’approssimazione appena fatta su B 6, otteniamo:
q
(2.12)
ω = ±ωL ± ωL2 + ω02 ' ±ωL + ω0
abbiamo cioè ottenuto la seguente variazione della velocità angolare:
e
eB
(2.13)
∆ω = ±ωl = ±
⇒ ∆ω =
B
2m
2m
ovvero ∆l = 2e B e ∆m = g0 ∆l, possiamo quindi introdurre per m = m0 +
αL B, con αL coefficiente di magnetizzazione. Passando ai valori medi su
un materiale esteso abbiamo che < m0 >= 0 mentre la parte dipendete dal
coefficiente di magnetizzazione non si annulla, quindi per un materiale esteso
immerso in un campo magnetico abbiamo la generazione di un momento
magnetico non nullo dato da m = αL B.
In realtà l’ultima affermazione, per come è stata mostrata, vale unicamente per B orientati in modo particolare (parallelo o antiparallelo ad
n̂), dobbiamo generalizzare il risultato nel caso di un angolo generico tra
il campo magnetico e l’asse di rotazione dell’atomo. Per farlo dobbiamo
aggiungere all’equazione del moto del caso precedente i termini dovuti alle
forze apparenti, ovvero:
(2.14)
mr̈0 = F + e(v 0 × B) + mωL2 r0 − 2mv 0 × ωL
dove la v 0 è la velocità misurata nel sistema rotante e gli ultimi due termini sono la forza centrifuga e quella di Coriolis. Se separiamo la forza
apparente, formata da queste ultime due, nella componente radiale e in
quella trasversale, osserviamo che quella radiale non varia col sistema di
riferimento, mentre cambia quella trasversale:
(2.15)
(F a )t = −2mvt0 ωL = −2mvr ωL
(2.16)
(F a )r = mωl2 r0 − 2mvt0 ωL ' 2mω0 r∗ ωL = 2mvt ωL
| {z }
2mω0 r∗ ωL
Avendo trascurato la precessione abbiamo ottenuto: F a = −2mvω L , ovvero,
tornando alla scrittura della F che:
(2.17)
mr̈0 = F + q(v 0 × B) + 2m(v 0 × ω L ) = F + v 0 × [qB + 2mω L ]
q
Se [qB + 2mω L ] = 0 ovvero ωL = − 2m
B, rientriamo nel caso della precessione di Larmor, ovvero torniamo al caso del moto non perturbato. Aggiungere il campo magnetico è guardare il sistema da un sistema
di riferimento in rotazione, se, invece di concentrarci sulla precessione, ci
poniamo nel sistema di riferimento in rotazione torniamo all’equazione non
perturbata. Dunque la soluzione che avevamo precedentemente ottenuto per
ω = ω0 ± ωL coincide con la soluzione generale. Ovvero, riassumendo:
In presenza di E p = αD E
In presenza di B m = αL B
La molecola d’acqua. Ci concentriamo sulla molecola d’acqua poiché
questo è un dipolo naturale piuttosto comune e che può essere un buon
modello per tutti i dipoli. Una molecola d’acqua è formata da due atomi
6La soluzione negativa è quella che causa ribaltamenti dell’asse di rotazione ed è usata
per le risonanze magnetiche NHR.
2. MAGNETIZZAZIONE, ELETTRIZZAZIONE E POLARIZZAZIONE DELLA MATERIA
55
di idrogeno ed uno di ossigeno disposti come nello schema di figura 10,
per quanto abbiamo visto aggiungere un campo elettrico E in una zona in
Figura 10. Molecola d’Acqua
cui è presente questa molecola produce un’energia data da U = −p0 · E.
Similmente aggiungere un campo magnetico produce un’energia U = −m0 ·
B. Ovvero abbiamo che in generale U = U0 cos θ, dove θ è l’angolo tra E
e p0 , oppure tra B e m0 . Poiché, in generale, non sarà presente una sola
molecola d’acqua bisognerà considerare anche il moto di agitazione termica
delle particelle, che, sfruttando la probabilità e la legge di Boltzmann, ci
dice che:
(2.18)
U
π (Molecola abbia energia U ) = Ae− kT
ove k è la costante di Boltzmann e T la temperatura nella scala assoluta.
Vogliamo sfruttare questa relazione per calcolare il valor medio del momento
di dipolo di molte molecole d’acqua sottoposte al campo elettrico o, similmente, a quello magnetico. Per farlo dobbiamo, in primo luogo, calcolare il
valore della costante A, consideriamo un angolo solido dΩ nel modo indicato
in figura 11 ed esprimiamo l’espressione appena trovata in forma angolare.
Ovvero andiamo a calcolare π(θ, ϕ) = π(U )dΩ, dove dΩ è l’elemento di an-
Figura 11. Angolo solido
golo solido, cioè dΩ = sin θdθdϕ, quindi la probabilità di trovare un dipolo
orientato con angolo θ ∈ (θ1 , θ2 ) e ϕ ∈ (ϕ1 , ϕ2 ), può essere scritta come:
Z ϕ 2 Z θ2
U
(2.19)
π(θ ∈ (θ1 , θ2 ), ϕ ∈ (ϕ1 , ϕ2 )) =
e− kT dΩ
ϕ1
θ1
56
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
Possiamo quindi calcolare il coefficiente A dalla relazione:
Z
Z 2π Z 2π
U
e− kT dΩ ⇒ A = R
π(U )dΩ = A
(2.20)
1=
0
4π
0
4π
1
U
e− kT dΩ
Per calcolare i valori medi ci conviene, come abbiamo fatto nel caso precedente, separarne la componente ortogonale da quella parallela, ovvero7:
(2.21)
< p⊥ >= p0 < sin θ >= 0
Z
2π
Z
π
U
dθ cos θAe− kT dΩ sin θ =
dϕ
< pk >= p0 < cos θ >= p0
0
0
Z 2π
Z π
Z π
U
U
− kT
dϕ
dθ sin θ cos θe
p0
sin θ cos θe− kT dθ
0
=
= 0Z π
Z 2π Z0 π
(2.22) =
U
U
− kT
− kT
sin θdθ
e
e
dθdϕ
0
0
0
= p0
e
U0
kT
e
U0
kT
U
− kT0
+e
U
− kT0
−e
−
kt
U0
= L(y) ove y =
U0
kT
Dove la funzione L che abbiamo ottenuto è la funzione di Langevin, il
cui sviluppo al primo ordine è L(y) ' y/3, possiamo quindi introdurre i due
seguenti coefficienti:
m2
p20
αOM = 0
3kT
3kT
quindi < p >= αOE E e < m >= αOM B.
Generalizziamo quanto ottenuto al caso generale. Consideriamo un oggetto macroscopico immerso in un campo elettrico o magnetico preesistente e
ad esso esterno e proviamo a descrivere ciò che avviene. Detto, come al
solito, d3 x l’elemento infinitesimo di volume dell’oggetto e N = ] cariche
contenute nel suo volume, definiamo la quantità di carica per unità di volume come n = N/d3 x. Osserviamo che il d3 x contiene comunque un numero
grande di molecole, ed è abbastanza piccolo da far sı̀ che il campo elettrico o
magnetico risultino su di esso costanti, cioè deve essere piccolo rispetto alle
variazioni del campo. Possiamo costruire i momenti di dipolo magnetico ed
elettrico posseduti dall’oggetto semplicemente come:
X
(2.24)
pi = N < pi >
P =
X
(2.25)
M=
mi = N < mi >
(2.23)
αOE =
possiamo quindi definire la densità di polarizzazione come:
P
M
M= 3
d3 x
d x
a questo punto conviene invertire le definizioni in modo da ottenere le
seguenti espressioni per i momenti di dipolo complessivo:
(2.26)
(2.27)
P=
P = Pd3 x = n < pi > d3 x
M = Md3 x = n < mi > d3 x
7Farò i conti per p, per m è sufficiente cambiare il simbolo nell formule.
2. MAGNETIZZAZIONE, ELETTRIZZAZIONE E POLARIZZAZIONE DELLA MATERIA
57
Definizione 2.2. Definiamo campo elettrico o magnetico locale, E ∗ o
B ∗ , il campo elettrico o magnetico calcolati nella regione di spazio occupata
dal volume d3 x.
Consideriamo ora l’effetto degli altri volumetti sul volumetto d3 x che
abbiamo fissato e su cui stiamo lavorando, cioè ci riduciamo a considerare i
campi locali al posto di quelli totali:
P = n [αD E ∗ + p0 L(yE )]
M = n [αL B ∗ + m0 L(yM )]
(2.28)
(2.29)
adesso prendiamo un punto P , esterno al volumetto d3 x, e andiamo a calcolarci il campo E T OT e B T OT , per cui dobbiamo tenere conto dei campi
elettrico e magnetico esterni e del campo di polarizzazione generato dal
materiale:
(2.30)
E T OT = E ∗ + E d3 x = E est + E pol
(2.31)
B T OT = B ∗ + B d3 x = B est + B pol
quello di cui abbiamo bisogno ora è di ottenere una espressione linearizzata
per i campi di polarizzazione, questi dipendono infatti dalla funzione di
Langevin che non è una funzione lineare dei campi che la generano, come
abbiamo già detto è possibile sviluppare, in un intorno di 0, la funzione
di Langevin L(y) sostituendole y/3, ovvero per valori piuttosto deboli del
campo locale o temperature piuttosto elevate, è possibile ottenere la seguente
scrittura:
p20
(2.32)
E∗
P = n αD +
3kT
m20
(2.33)
M = n αL +
B∗
3kT
da cui definiamo i coefficienti di polarizzabilità elettrica e polarizzabilità
magnetica come:
Definizione 2.3. Detto αD il coefficiente di polarizzabilità elettrica per
deformazione definiamo:
p20
= Coefficiente di polarizzabilità elettrica
3kT
Detto αL il coefficiente di polarizzabilità magnetica per effetto Larmor definiamo:
m2
(2.35) αm := αL + 0 = Coefficiente di polarizzabilità magnetica
3kT
(2.34)
αe := αD +
Nota 6. L’ipotesi iniziale sul d3 x fa sı̀ che, in realtà, si stia lavorando al caso
statico, nel caso di E est e B est variabili nel tempo le due costanti appena
definite dipendono fortemente dalla frequenza di cambiamento. Esistono
frequenze per cui l’effetto diventa quello di una oscillazione risonante. Se
le molecole sono polari, ovvero se il materiale è paramagnetico, bisogna
prestare molta attenzione anche alla temperatura8.
8Esiste la cosiddetta Legge di Curie secondo cui M = C B , dove C è l’opportuna
T
costante di Curie
58
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
Suscettività elettrica e magnetica. Quello che vogliamo ora mostrare
è che tutti i dipoli indotti contenuti all’interno del materiale si comportano
come una distribuzione di cariche, cominciamo dal calcolare il momento di
dipolo di un volumetto come:
1
1
r − r0
r − r0
3
Pd x
P
d3 x0
(2.36)
=
4πε0
|r − r0 |3
4πε0
|r − r0 |3
quindi per avere il potenziale di dipolo totale non ci resta che integrare su
tutto il volume D dell’oggetto:
Z Z
1
1
r − r0
1
3 0
0
(2.37) φ(r) =
P
d x =
P∇
d3 x0
4πε0 D
|r − r0 |3
4πε0 D
|r − r0 |
osserviamo che:
(2.38)
∇
0
1
P
|r − r0 |
= ∇0 P
1
1
+ P∇0
0
|r − r |
|r − r0 |
possiamo quindi riscrivere l’integrale come:
Z
Z
1
1
1
0
3 0
0
3 0
d x −
∇P
d x =
∇ P
φ(r) =
4πε0 D
|r − r0 |
|r − r0 |
D
Z (2.39)
Z
1
1
1
2 0
0
3 0
=
· n̂d x −
∇P
d x
P
4πε0 ∂D
|r − r0 |
|r − r0 |
D
da cui abbiamo ottenuto due risultati piuttosto evidenti, il potenziale generato dalla somma dei dipoli sembra più un potenziale di monopolo che uno
di dipolo e la densità di polarizzazione si comporta come la somma di una
densità di volume ρp = −∇0 P e di una densità superficiale σ p = P n̂. In
ipotesi di omogeneità del materiale possiamo porre ∇0 P = 0, infatti l’effetto di ogni dipolo all’interno del materiale è annullato dal suo vicino e il
pattern si ripete identico in tutte le direzioni fino a giungere alla superficie,
ovvero la carica di polarizzazione è disposta tutta sulla superficie del materiale. Se non siamo in ipotesi di omogeneità sono da considerare entrambe
le distribuzioni di carica.
Dobbiamo ora calcolare il potenziale del campo di induzione magnetica
generato dalla polarizzazione, per farlo, similmente a quanto abbiamo fatto
per il campo elettrico, dobbiamo calcolare l’integrale:
Z
µ0
Md3 x0 × |r − r0 |
(2.40)
A(r) =
4π D
|r − r0 |3
riconosciamo di nuovo il gradiente di 1/r e riscriviamo l’integrale come:
Z
µ0
1
(2.41)
A(r) =
M × ∇0
d3 x0
4π D
|r − r0 |
dalle proprietà del prodotto vettore abbiamo che:
(2.42)
∇0 ×
M
∇0 × M
1
=
− M × ∇0
|r − r0 |
|r − r0 |
|r − r0 |
2. MAGNETIZZAZIONE, ELETTRIZZAZIONE E POLARIZZAZIONE DELLA MATERIA
59
tornando all’integrale otteniamo:
Z
µ0
M
∇0 × M 3 0
0
3 0
A(r) =
−∇ ×
d x +
d x =
4π D
|r − r0 |
|r − r0 |
(2.43)
Z
Z
µ0
M × n̂ 2 0
∇0 × M 3 0
=
d
x
+
d
x
0
4π ∂D |r − r0 |
D |r − r |
la densità di polarizzazione magnetica si comporta come una densità di corrente di polarizzazione di volume data da j p = ∇×M e da una di superficie
data da j p = M×n̂. Arrivati a questo punto possiamo finalmente modificare
le equazioni di Maxwell per ottenerle nella forma in presenza di materiali:
ρ + ρp
∇·E =
ε0
∇·B = 0
∂B
(2.44)
∇×E = −
∂t
∂E
∇×B
=
µ
+
j
+
ε
j
0
0
p
∂t
Contando con attenzione le equazioni e le incognite ci rendiamo conto che abbiamo ottenuto un sistema di 8 equazioni in 10 incognite, dobbiamo dunque
trovare un modo sensato di ridurre il numero di incognite per avere un set
di soluzioni uniche, rintroduciamo il vettore spostamento elettrico come:
(2.45) D := ε0 E + P ⇒ E =
D−P
∇·D ∇·P
⇒ ∇·E =
−
⇒ ∇·D = ρ
ε0
ε0
ε0
la divergenza del vettore spostamento D non dipende dalle cariche di polarizzazione. Reintroduciamo ora il vettore campo magnetico come:
H=
(2.46)
B
∂D
− M ⇒ ∇×M = j +
µ0
∂t
dunque anche la rotazione del campo magnetico non dipende dalle correnti di
magnetizzazione. Possiamo a questo punto riscrivere le equazioni di Maxwell
come:
∇·D = ρ
∇·B = 0
∂B
(2.47)
∇×E = −
∂t
∂D
∇×H = j + j
p ∂t
Adesso, per semplificare veramente le equazioni, valutiamo la seguente dipendenza:
P = P(E ∗ ) = P(E ∗ (E est ))
(2.48)
allora:
(2.49)
Pi =
X
j
xij Ej +
X
jh
xijh Ei Eh +
X
xjhk Ei Ej Ek + · · ·
jhk
eliminando da questo tipo di trattazione i materiali ferromagnetici (le calamite)
e quelli ferroelettrici possiamo definire le due seguenti quantità costanti:
60
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
Definizione 2.4. Si dice suscettività elettrica la quantità χE tale che:
(2.50)
P = χ E ε0 E
Si dice suscettività magnetica la quantità χM tale che:
χM B
(2.51)
M=
1 + χM µ0
in questo modo otteniamo le seguenti scrittura per il vettore spostamento
e il vettore campo magnetico:
D = ε0 E + χE εE = ε0 (1 + χE )E = ε0 εr E
B
χM B
χM
B
B
(2.53)
−
= 1−
=
H=
µ 0 1 + χM µ 0
1 + χM µ 0
µ0 µr
Dove abbiamo definito:
(2.52)
Definizione 2.5. Coefficiente dielettrico relativo:
(2.54)
εr = 1 + χ E
Coefficiente di permeabilità magnetica relativa:
1
χM
1
(2.55)
=1−
=
µr
1 + χM
1 + χM
Come abbiamo già osservato all’inizio dei calcoli, tutte queste costanti
dipendono fortemente dalla temperatura, dalla sostanza in oggetto e dalla
frequenza di oscillazione dei campi.
A titolo di esempio, per i dielettrici gassosi, nell’approssimazione della
funzione di Langevin usata sino ad ora, abbiamo:
h
p0 i
n h
p0 i
E ⇒ χE =
αD +
(2.56)
P ' n αD +
3kT
ε0
3kT
2.1. Rifrazione nei campi elettrici e magnetici. Consideriamo due
mezzi di separazione omogenei ed isotropi, immaginiamo un campo elettrico
generato da cariche e correnti al di fuori della superficie di separazione9, in
questo modo otteniamo:
∇·B = 0
∇·E = ρp /ε0
(2.57)
∇·E = (ρ + ρp )/ε0 ⇒
e
∇·D = 0
∇·H = 0
osserviamo che se il caso è stazionario abbiamo anche ∇×E = ∇×D =
∇×H = 0. Ricaviamo a questo punto le condizioni di continuità. Come
avevamo già fatto per dimostrare la continuità di E e di B, iniziamo ad
analizzare le due situazione rappresentate in figura 12, nel caso a divergenza nulla calcoliamo il flusso di E attraverso la superficie S del cilindretto
infinitesimo a cavallo della superficie di separazione, quindi:
ρp
(2.58)
ΦS (E) = E 1 n̂1 S1 + E 2 n̂2 S2 = (E 1n − E 2n )S =
ε0
mentre se lo calcoliamo per il vettore spostamento otteniamo:
(2.59)
ΦS (D) = (D1n − D2n )S = ∇·D = 0
abbiamo quindi ottenuto che la componente normale del vettore spostamento è continua al passaggio tra superfici, cioè D1n = D2n . Ripetendo lo stesso
9ρ vale zero nell’intorno della superficie.
2. MAGNETIZZAZIONE, ELETTRIZZAZIONE E POLARIZZAZIONE DELLA MATERIA
61
Figura 12. Divergenza nulla e Rotazione nulla
procedimento per il vettore di induzione magnetica riotteniamo quanto avevamo già visto, cioè B 1n = B 2n . Passiamo ora al caso a rotazione nulla,
ovvero calcoliamo la circuitazione di E lungo la curva in figura 12, questa è
banalmente:
(2.60)
E 1 l1 + E 2 l2 = E 1 t − E 2 t = 0 ⇔ E 1t = E 2t
cioè si conserva la componente tangente alla superficie del vettore campo elettrico, similmente si può ripetere per il vettore campo magnetico e
si ottiene H 1t = H 2t . Per concludere questa parte non ci resta che dare
un’espressione per le costanti dielettriche tra i mezzi in base agli angoli di
deviazione dei campi attraverso la superficie. Considerando la notazione
Figura 13. Angoli di deviazione e coeff.
passaggio tra mezzi
relativi al
della figura 13 e i calcoli appena effettuati possiamo scrivere:
(2.61)
(2.62)
E 1t
E
E 1t
E 2t
= 2t ⇒
=
D1n
D2n
ε1 ε0 E 1n
ε2 ε0 E 2n
H 1t
H
H 1t
H 2t
= 2t ⇒
=
B 1n
B 2n
µ1 H 1n
µ2 H 2n
Dalla geometria si ottiene facilmente che ε1 tan θ1 = ε2 tan θ2 ovvero, possiamo ottenere le due seguenti leggi:
Legge di rifrazione tra mezzi per il campo elettrico:
(2.63)
tan θ2
ε1
=
tan θ1
ε2
Legge di rifrazione tra mezzi per il campo magnetico:
(2.64)
tan θ2
µ1
=
tan θ1
µ2
62
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
Osserviamo che se tutte le linee della superficie S sono tangenti al campo non
si conserva niente, infatti queste sono tutte contenute nella superficie S. Se
invece la superficie risulta essere equipotenziale, abbiamo la conservazione
sia di D che di B.
3. Le Correnti
Definiamo due diversi tipi di ”correnti”:
Definizione 3.1. Si dice corrente di conduzione una corrente che fa sı̀
che in un materiale globalmente neutro e fermo alcune cariche negative si
spostino da un punto all’altro del conduttore stesso.
Definizione 3.2. Si dice corrente di convezione una corrente causata
dal moto di un oggetto carico.
Supponiamo di porre due capi di un conduttore ad una differenza di
potenziale costante, questo farà si che gli elettroni all’interno del conduttore
migrino per un tempo finito generando una corrente. Questa si manterrà
attiva finché la separazione delle cariche all’interno del conduttore non avrà
generato un campo elettrico E i interno in grado di opporsi a quello esterno
E che aveva generato la differenza di potenziale iniziale, cioè per E = E i .
Senza campo elettrico esterno E la forza media su ogni elettrone è pari a
zero, possiamo immaginare che l’elettrone compia urti elastici con gli altri
elettroni causando una forza mediamente nulla10.
Se < v >6= 0 questo implica che < 12 me u2 >6= 0, in particolare dalla
relazione di Boltzmann otteniamo che < 12 me u2 >= 32 kT , detto τ il tempo
medio tra due urti consecutivi degli elettroni, possiamo introdurre la quantità λ =< u > τ detta cammino libero medio, cioè la quantità, in media,
di spazio che l’elettrone compie prima di urtarne un altro. Se attacchiamo
ai capi del nostro conduttore una pila, cioè se generiamo una differenza di
potenziale, quindi un campo elettrico E abbiamo che:
(3.1)
mv i = mui − eEτ
dove abbiamo rappresentato la velocità i-ma dopo un tempo τ , passando ai
valori medi otteniamo:
< −eEτ >
eEτ
eλ E
=0−
=−
(3.2)
< ve >=< ui > +
m
2m
2<u>m
Definizione 3.3. Si definisce mobilità degli elettroni la quantità:
(3.3)
µ := −
eλ
2m < u >
cioè la mobilità di elettroni è il coefficiente di proporzionalità tra la
velocità media e il modulo del campo elettrico, come abbiamo visto < v >=
µE, ricordiamo che avevamo definito j = ρ < v >, da cui, sostituendo
quest’ultima relazione, possiamo ottenere j = ρ < v >= ρµE:
10Come idea siamo piuttosto vicini a quella di un gas perfetto, ci basta sostituire
all’ipotesi di rarefazione l’ipotesi di bassa probabilità di urti multipli tra elettroni.
3. LE CORRENTI
63
Definizione 3.4. Si definisce conducibilità elettrica la quantità:
(3.4)
γ = ρµ = n(−e)µ =
e2 λ
2m < u >
dove abbiamo ricordato che n = N/d3 x e ρ = n(−e).
cioè la conducibilità elettrica è coefficiente di proporzionalità tra la densità di corrente elettrica j e il campo elettrico E che la genera. Questo,
essendo un modello approssimato, presenta alcuni problemi che raccogliamo
in questi cinque punti:
(1) Suppone che il rapporto tra conducibilità termica ed elettrica sia
costante.
(2) Suppone una dipendenza lineare dalla temperatura.
(3) Trascura il fatto che la capacità termica dei metalli è diversa da
quella degli isolanti √
solidi.
−1
(4) Afferma che γ ∝ T , mentre sperimentalmente si ha γ −1 ∝ T .
(5) Non è in grado di spiegare la superconduttività.
In vista di queste approssimazioni è opportuno dare la seguente definizione
per i materiali che rientrano nel campo d’azione del modello:
Definizione 3.5. Si dicono conduttori Ohmici tutti quei conduttori che
obbediscono alla legge:
(3.5)
j = γE
Supponiamo di avere un conduttore Ohmico filiforme, per questo abbiamo che j = i/S n̂, dove S è la superficie della sezione del filo e n̂ la normale
uscente a tale sezione, essendo questo un conduttore Ohmico abbiamo che:
i
n̂ = γE
(3.6)
S
detti A e B i capi del filo di lunghezza l abbiamo che:
Z B
Z B
Z B
i
i
l
(3.7)
ϕ(B) − ϕ(A) =
Edl =
n̂dl =
dl =
i
Sγ
A
A sγ
A sγ
possiamo a questo punto dare le seguenti definizioni:
Definizione 3.6. Chiamiamo differenza di potenziale ai capi del filo
AB la quantità V := ϕ(B) − ϕ(A), resistività la quantità ρ := γ −111 e
resistenza la quantità R := ρlS −1 (dove S è sempre la sezione del conduttore).
Possiamo a questo punto enunciare le tre leggi di Ohm:
Teorema 3.1 (Leggi di Ohm). I conduttori Ohmici soddisfano le tre seguenti relazioni:
(1) j = γE 1a legge di Ohm;
(2) ρ = γ1 2a legge di Ohm;
(3) V = Ri 3a legge di Ohm.
11Attenzione a non confondere la ρ della resistività con quella della distribuzione di
carica.
64
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
Possiamo esprimere la dipendenza della resistività dalla temperatura
come ρ(T ) = ρ0 [1 + α(T − T0 )], sfruttando una relazione simile a quella
della dipendenza dimensione dei materiali al variare della temperatura12.
Eravamo partiti dal considerare gli urti all’interno del conduttore, dalla
termodinamica sappiamo che l’energia meccanica degli urti si trasforma in
calore, dunque energia, questo avviene ovviamente anche per i conduttori,
possiamo quindi ritrovare l’effetto Joule e calcolare la potenza dissipata
nel passaggio di corrente attraverso il conduttore come:
dW
(3.8)
=j·E
d3 x
che possiamo integrare nel seguente modo:
Z
Z Z
Z Z
3
j · Ed x =
j · Edlds =
j n̂ · Edlds =
W =
C S
Z C SZ
ZD
(3.9)
i
iE · dl = iV
=
E · dl dS =
S
C
C S
Teorema 3.2 (Legge di Joule per i Circuiti).
V2
= Ri2
R
Introduciamo ora un elemento fondamentale dei circuiti elettrici: le resistenze che, sostanzialmente, non sono altro che componenti particolari a
cui è associata una determinata resistenza elettrica R13. Esistono sostanzialmente due modi di accoppiare diverse resistenze tra loro, questi sono la serie,
cioè quando in ogni conduttore passa la stessa corrente i, ed il parallelo,
cioè quando ai capi di ciascuna resistenza è posta la stessa differenza di
potenziale V (vedi fig. 14). Quello che siamo interessati a fare è ridurre il
(3.10)
W = iV =
Figura 14. Resistenza, resistenze in serie, resistenze in parallelo
sistema formato da più resistenza ad un’unica resistenza equivalente. Cominciamo dal caso della serie, dalla relazione V = Ri e dall’uguaglianza delle
i otteniamo la relazione:
V1
V2
Vn
=
= ··· =
(3.11)
R1
R2
Rn
cioè possiamo scrivere la differenza di potenziale ai capi della serie come:
n
X
(3.12) V = V1 + V2 + · · · + Vn = R1 i + R2 i + · · · + Rn i = i
Rj = iReq
j=1
12Sostanzialmente è la solita strategia di sostituire ad una funzione incognita il suo
sviluppo di Taylor conoscendone il valore in alcuni punti particolari.
13In genere si può pensare a pezzi di filo più ”spessi”.
3. LE CORRENTI
65
Per il caso del parallelo abbiamo che è la differenza di potenziale ad essere
costante ai capi delle resistenze dunque possiamo scrivere la corrente che
fluisce attraverso tutto il sistema di resistenze come:
(3.13)
i = i1 + i2 + · · · + in =
n
X
V
V
V
V
1
+
+ ···
=V
=
R1 R2
Rn
Rj
Req
j=1
Nota 7. Non tutti i circuiti elettrici possono essere ridotti ad una sola
resistenza equivalente, è sufficiente considerare il caso di due serie in parallelo
o, equivalentemente, due paralleli in serie (i cosiddetti circuiti a ponte).
Definizione 3.7. Definiamo ramo di un circuito un insieme di elementi
attraverso cui passa una sola corrente.
Definizione 3.8. Definiamo nodo un punto in cui convergono almeno tre
rami.
Definizione 3.9. Definiamo maglia una successione chiusa di rami.
Possiamo a questo punto introdurre le Leggi di Kirchhoff, pure relazioni topologiche dei circuiti elettrici a parametri concentrati che ivi sostituiscono completamente le ben più complesse e generali Equazioni di Maxwell.
Teorema 3.3 (Leggi di Kirchhoff). Dato un circuito qualsiasi si ha:
(1) La somma delle correnti entranti, rispettivamente uscenti, in un
nodo è zero.
(2) La somma delle tensioni lungo una linea chiusa (con il segno appropriato in funzione del verso di percorrenza della maglia stessa)
è pari a zero.
Per ottenere la prima legge è sufficiente ricordare che:
Z
n
X
(3.14)
0=
j · n̂d2 x =
ij
S
j=1
Per la seconda dobbiamo considerare il concetto di corrente di maglia ih ,
cioè considerare la corrente che circolare in ogni maglia h del circuito, di cui
consideriamo la resistenza equivalente Rh , in questo modo otteniamo:
I
X
X
X
Vi ⇔
ih Rh =
fk
(3.15)
E=
i
h
k
dove le fk sono le differenze di potenziale dei rami.
Isolanti, dielettrici e semiconduttori. Supponiamo di avere un materiale, simile al sale da cucina, i suoi atomo oscillano attorno ad una posizione di equilibrio in continuo bilanciamento della forza elettrica e dell’agitazione termica, abbiamo, in questo modo, un elemento globalmente
neutro e privo di cariche libere. Supponiamo ora di cambiare di posto ad un
atomo, cosa accade? Abbiamo ottenuto in questo modo una dislocazione
ed una lacuna. Ovvero abbiamo ancora un materiale globalmente neutro,
ma localmente, in un intorno di dislocazione e lacuna, non più neutro. Dopo
un po’ di tempo la lacuna tenderà ad essere riempita e dunque la dislocazione
66
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
si sposterà. Cioè la coppia dislocazione-lacuna si sposta naturalmente lungo
tutto il materiale e che è ancora complessivamente neutro, definiamo:
] ioni
(3.16)
n0 = 3 = numero di ioni per unità di volume
d x
poiché il materiale è globalmente neutro il numero di ioni positivi per unità di
volume, n+ , e quello di ioni negativi n− sono uguali, in particolare detta Ue
l’energia di estrazione, necessaria a causare una coppia lacuna-dislocazione,
abbiamo che:
(3.17)
Ue
n+ = n0 e− kT = n−
cioè il processo che abbiamo descritto fa sı̀ che ci siano degli ioni carichi
che si muovono lungo il materiale, indichiamo con (z+ , µ+ ) la carica degli
ioni positivi e la loro mobilità e con (zi , µ− ) la carica degli ioni negativi e la
loro mobilità, in questo modo sfruttando la relazione j = ρv otteniamo due
densità di corrente date da:
(
j + = n+ z+ eµ+ E
(3.18)
j − = n− z− eµ− E
sommando i due contributi otteniamo la seguente legge:
(3.19)
j = j + + j − = (n+ z+ eµ+ + n− z− eµ− ) E = γE
|
{z
}
γ
abbiamo riottenuto una legge simile a quelle del conduttore ohmico, tuttavia
nei materiali di questo tipo, che chiamiamo semiconduttori, il coefficiente
γ è estremamente piccolo, volendo darne una stima possiamo dire che γ ∝
−1
e−T (segue dalla dipendenza lineare da n+ ).
La perforazione del dielettrico. Supponiamo di aver un condensatore piano tra le cui facce è posto un dielettrico, il condensatore è attaccato
ad una pila che genera una differenza di potenziale V , nel circuito, mentre
il condensatore si carica, circola una corrente i0 = RV0 , quantità di calore
alla temperatura T0 è data, sfruttando la legge di Joule, da Q+ (T0 ) =
2
V2
R0 ,
V
in generale si ha che Q(T ) = R(T
) , la struttura all’equilibrio cederà all’ambiente un calore Q− (T ) = α(T − T0 ) (con α opportuna capacità termica).
Per determinati valori di E, rispettivamente di V , lungo la linea centrale
tra le piastre del condensatore si può ottenere la fusione del dielettrico. Da
quel momento la corrente comincia ad aumentare fino a creare un canale di
scarica attraverso cui il condensatore viene messo in cortocircuito14.
La superconduttività. Per una temperatura 0 < T < 10K alcuni materiali presentano una resistenza al passaggio di corrente praticamente nulla.
Questo fa sı̀ che una corrente si mantenga circolante per tempi estremamente
lunghi, inoltre anche il calore ceduto per effetto Joule è quasi nullo. In questo
modo si ottengono i magneti superconduttori. Questi sono opachi al campo
magnetico fino ad un certo valore di questo, superato il quale il materiale,
pur mantenendo la temperatura, perde le proprietà superconduttive.
14Un cortocircuito è un collegamento fra due punti di un circuito che ha resistenza
nulla, ciò impone una tensione nulla (o trascurabile) ai suoi capi e non impone vincoli
sulla corrente che passa attraverso di esso, che può assumere valori molto elevati.
3. LE CORRENTI
67
Tempo di rilassamento. Supponiamo di avere un dielettrico caratterizzato da un ε = ε0 εr e da una conduttività γ, aggiungiamo, in qualche
modo, all’istante t = t0 una densità di carica ρ(t0 ) = ρ0 ad un volumetto
infinitesimo dell’oggetto. Dopo un ∆t la carica è uscita da questo volumetto
attraverso le sue pareti, ovvero:
dρ
γ
= ∇·j = γ∇·E = ρ
dt
ε
abbiamo ottenuto un’equazione differenziale del primo ordine a variabili separabili che è, in realtà, un problema di Cauchy, infatti abbiamo la condizione
iniziale data da: ρ(t0 ) = ρ0 . Risolvendo l’equazione otteniamo:
(3.20)
(3.21)
−
t
γ
dρ
dt ⇔ ρ(t) = ρ0 e− τ
=−
ρ
ε0 ε r
dove τ = ε0γεr è detto tempo di rilassamento, per un buon conduttore
questo è dell’ordine di 10−19 s, mentre per un buon isolante è dell’ordine di
104 s ' 2h e 1/2.
I Liquidi. Consideriamo un liquido puro, come l’H2 O in cui consideriamo disciolto un elettrolita, in genere un sale, del tipo N aCl. In questo
modo otteniamo un conduttore discreto. L’acqua è un buon solvente, infatti
il suo εr = 80, dunque il campo elettrico al suo interno è 80 volte meno
intenso che nel vuoto. Tutte le molecole polari, cioè che si tengono insieme
grazie a legami di tipo elettrico, quando sono immerse in acqua si disciolgono
piuttosto in fretta. Nell’esempio che abbiamo costruito abbiamo che dopo
qualche istante il sale immerso in acqua si discioglie e si formano delle ”sfere” formate da un centro N a+ e una corona di molecole d’acqua orientate
con il polo negativo verso il sodio. Cioè delle sfere globalmente cariche positivamente. Diciamo z+ il numero di molecole d’acqua, µ+ la loro mobilità e
r+ il raggio di queste sferette. Se applichiamo un campo elettrico a questo
insieme possiamo schematizzare le forze agenti come Fc = z+ eE a cui aggiungiamo un freno dovuto ad un attrito viscoso del tipo Fa = −6πηr+ v 15,
all’equilibrio raggiungiamo una velocità asintotica costante, cioè possiamo
scrivere:
z+ e
(3.22)
Fc = Fa ⇔ v =
E = γE
6πr+ η
cioè di nuovo un risultato di tipo ohmico, in cui tuttavia abbiamo trascurato che z+ e z− sono omogenee solo in zone lontane dagli elettrodi, che
avvengono reazioni chimiche sugli elettrodi e che gli ioni tendono a legarsi
agli elettrodi16.
I Gas.Come un liquido puro, un gas ideale è un buon isolante, tuttavia
se il gas si ionizza questo diventa un buon conduttore. In analogia a quanto
abbiamo già fatto definiamo n = ] ioni/d3 x, con una carica ciascuno di eZ,
chiamiamo µ+ la mobilità degli ioni positivi e µ− quella degli ioni negativi.
Dunque se applichiamo un campo elettrico E al gas otteniamo j = mez(µ+ +
µ− )E, siamo in una situazione del tutto analoga a quello che accade nei
liquidi, tuttavia il numero di ioni nella soluzione è in genere molto maggiore
15η è il coefficiente di Poisson.
16Argentatura, cromatura e galvanoplastica.
68
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
di quello nei gas, mentre le mobilità nel gas sono molto maggiori di quelle
in soluzione, il gas è ovviamente molto più rarefatto.
Fatto 3. Gli ioni che si muovono in un gas generano altri ioni in modo
dipendente dalla corrente, dunque abbiamo:
(3.23)
j = γ(j)E
cioè abbiamo ottenuto un comportamento non ohmico.
Facendo un discorso puramente qualitativo, consideriamo un’ampolla di
lunghezza l e superficie S come quella in figura 15. Detta n la densità di ioni
nell’ampolla definita al solito modo abbiamo che il numero di particelle in
Figura 15. Elettricità nei GAS.
essa contenuto è dato nlS, siamo interessati alla sua variazione che possiamo
esprimere come:
dn
= αlS
(3.24)
lS
dt
dove α rappresenta il numero di ioni prodotti al secondo, se non ci fosse
campo elettrico gli ioni del gas si ricombinerebbero con una probabilità β
che dipende dalla quantità di ioni dei due segni, cioè sarà β ∝ n2 . Bisogna
anche tenere conto degli ioni che toccano gli elettrodi e vengono inseriti nel
circuito, dunque possiamo riscrivere la relazione precedente come:
j
dn
(3.25)
lS
= αlS − βn2 lS − S
dt
e
dn
in una situazione stazionaria, cioè dt = 0, abbiamo:
j
el
Se il gas è relativamente denso ed E è debole, rispetto al cammino libero
medio, cioè alla pressione del gas nell’ampolla, le particelle non acquistano
notevole velocità, dunque:
j
(3.27)
βn2 >>
el
ovvero α = βn2 , questo oggetto si comporta circa come un liquido, dunque:
√
α
(3.28)
γ = ne(µ+ + µ− ) = e
(µ+ + µ− )
β
nell’ipotesi di ”corrente bassa” la γ è indipendente dalla corrente ed è
costante. Se, invece, la corrente è abbastanza forte da non poter trascurare
(3.26)
α = βn2 +
3. LE CORRENTI
69
j
la quantità nl
, cioè quando il cammino libero medio ha dimensione maggiore
di quello dell’ampolla, possiamo trascurare il termine di ricombinazione βn2
e otteniamo:
(3.29)
jS = αElS ⇔ in = jS = αElS
dove in è detta corrente di saturazione. A questo punto possiamo aumentare
ancora il campo elettrico E ed accelerare gli ioni verso gli elettrodi aumentando l’energia cinetica, questo gli fa urtare gli altri atomi neutri all’interno
del gas ionizzandoli. Il gas diventa talmente conduttore da costruire una
resistenza negativa, sembra che il gas spinga le particelle. Questo è il genere
di fenomeni che dà luce ai tubi al neon, se si colora l’ampolla con una vernice
fluorescente, questa acquisita l’energia dagli ioni del gas, si eccita e durante
il processo di scarica emette luce. Se aumento ancora finisco per ”strappare”
direttamente gli elettroni, perdo un fattore 2000 sulla massa e guadagno un
fattore 10.000 sull’energia cinetica. Ottengo una scarica a bagliore. Se riesco
ad aumentare ancora costruisco un canale a bassa resistenza e ottengo una
scintilla/scarica, se alzo ancora ottengo una scintilla ad arco costante.
Abbiamo cosı̀ concluso il caso di correnti stazionarie nei dielettrici, come
ultima nota ricordiamo la seguente coppia di equazioni:
∇·j = 0 Equazioni di continuità caso stazionario
(3.30)
Equazione dei conduttori Ohmici
j = γE
Guardandole bene ci rendiamo conto che possiamo costruire in ”analogia”
a queste due la coppia di equazioni:
∇·B = 0
(3.31)
B = µH
come abbiamo già detto più volte, equazioni della stessa forma hanno soluzioni
della stessa forma. Dunque le soluzioni che abbiamo visto per la coppia
precedente sono soluzioni anche di queste, ma cosa significa questo? Supponiamo di avere un solenoide di sezione S con un numero N di spire, dalla
prima equazione possiamo scrivere:
(3.32)
0 = ΦS (B) = B1 S1 − B2 S2
cioè il flusso di B è costante, dunque possiamo scrivere:
Φ
S
il cilindretto del solenoide svolge un ruolo analogo a quello del filo nella prima
coppia di equazioni, possiamo dunque scrivere, proseguendo l’analogia, che:
Z B
Z B
Z
I
B
Bdl
Φ
Φ
(3.34)
· dl =
=
B
dl =
l = inl = iN
H · dl =
µ
µ
Sµ
Sµ
A
A
A
(3.33)
|B| =
dunque chiamiamo forza magneto-motrice17 la quantità:
I
(3.35)
fmm := H · dl = iN
17Nel caso elettrico avevamo V = f
em = Ri.
70
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
sfruttando la relazione precedente abbiamo anche che:
(3.36)
fmm = RΦ
dove
R :=
l
è detta Riluttanza
Sµ
Abbiamo costruito la corrente magnetica e i circuiti magnetici, per cui
continuano a valere le leggi di Kirchoff e le analoghe regole di somma per le
riluttanze in serie ed in parallelo.
Nota 8. La corrente magnetica non trasporta nulla, è solo il flusso del
vettore B ad essere trasportato.
La mutua induzione. Consideriamo due circuiti γ1 e γ2 percorsi rispettivamente dalle correnti i1 e i2 , si veda fig. 16. Per quanto abbiamo visto
Figura 16. Mutua induzione.
sulle correnti, γ1 produce un campo magnetico che in parte è concatenato
col secondo circuito il cui potenziale è dato da:
Z
I
j0
µ0
dl
µ0
3 0
d x =
i1 ·
(3.37)
A1 =
0
0
4π D |r − r |
4π
γ1 |r − r |
calcoliamo ora il flusso di B generato da γ1 e concatenato a γ2 come:
Z
I
2
Φs (B 1 ) =
(∇×A1 )n̂d x2 =
A1 dl2 =
S2
I (3.38)
γ2
dl01
µ0
=
i1 ·
dl2 =
0
4π
γ2
γ1 |r − r |
I I
µ0
dl01 dl2
=
i1 =
0
4π
γ2 γ1 |r − r |
I I
µ0
dl01 dl2
=M12 i1 dove M12 =
0
4π
γ2 γ1 |r − r |
I
Definizione 3.10. M12 si dice coefficiente di mutua induzione.
Avremmo potuto fare tutti i calcoli fatti sin qui a circuiti invertiti,
ottenendo la stessa relazione con i differenziali scambiati, in conclusione
abbiamo:
Φ2 (B 1 ) = M12 i1
(3.39)
Φ1 (B 2 ) = M21 i2 = M12 i1
3. LE CORRENTI
71
se facciamo coincidere γ1 con γ2 , in altre parole, se consideriamo il flusso di
B concatenato con il circuito che lo genera otteniamo la seguente relazione:
(3.40)
Φ1 (B 1 ) = Li1
Definizione 3.11. Si chiama induttanza la quantità:
I I
dl01 dl2
µ0
(3.41)
L=
4π γ1 γ2 |r − r0 |
Osserviamo che un’induttanza ai fini della corrente continua crea un
cortocircuito, mentre, per quanto riguarda la corrente alternata (in generale
variabile) abbiamo che:
Z
I
∂B
di
−
(3.42)
fem = E · dl =
n̂ds = L
∂t
dt
S
ovvero:
di
(3.43)
V (t) = L
dt
Resistenza
V = Ri
Z
1 t
idt
Riassumendo: Condensatore V (t) = C
0
di
Induttanza
V (t) = L
dt
3.1. I Circuiti Elettrici. Prima di cominciare a trattare alcuni esempi di circuiti enunciamo i due seguenti teoremi, di cui non diamo una
dimostrazione, ma che risultano piuttosto utili a tal fine.
Teorema 3.4 (Teorema di Thévenin). Qualunque circuito lineare, comunque
complesso, visto da due punti, è equivalente ad un generatore reale di tensione, cioè un generatore ideale di tensione in serie con un resistore. L’equivalenza vale per quello che accade all’esterno della rete e non certo per
quello che succede all’interno di essa.
Teorema 3.5 (Teorema di Norton). Una rete elettrica composta da generatori di tensione, corrente e resistori con due terminali di uscita è equivalente
a un generatore reale di corrente in parallelo con una resistenza.
La Carica del Condensatore. Cominciamo con un circuito formato
da un generatore di corrente continua, una resistenza e un condensatore in
serie, quello che è chiamato circuito RC:
R
f
C
Detta i la corrente che circola nel circuito dobbiamo ora risolvere la seguente
equazione differenziale:
Z
1 t 0 0
(3.44)
iR = f −
i dt
C 0
| {z }
VC (t)
72
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
Con la condizione iniziale, data dal valore della corrente al tempo t = 0 che
è i(0) = f /R, ci conviene derivare l’equazione che abbiamo scritto rispetto
al tempo e risolvere quindi il problema di Cauchy:
di
R dt = − C1 i
(3.45)
f
i(0) = i0 = R
detto τ = RC detto tempo caratteristico abbiamo che la soluzione dell’equazione è data da:
t
t
−
di
t
f −
1
i
τ
τ
= e
=−
dt ⇔ log = − ⇔ i(t) = i0 e
i
RC
i0
τ
R
(3.46)
Possiamo ora calcolare il lavoro, dunque l’energia, fornita dalla pila per
caricare il condensatore, ricordando che W = f i(t), quindi:
t
t +∞
Z +∞
Z +∞ 2
2
f −
f − f2
(3.47) L =
W (t)dt =
e τ = −τ e τ = Cf 2
=τ
R
R
R
0
0
0
questo lavoro tuttavia non è stato usato tutto per caricare il condensatore,
parte è andata perduta nella resistenza, infatti possiamo calcolare l’energia
dissipata dalla resistenza per effetto Joule come:
+∞
Z
(3.48)
2
UJ,R =
Z
+∞
Ri dt =
0
0
2t
f2 −
1
f2 τ
R 2e τ =
= Cf 2
R
R2
2
dunque l’energia immagazzinata tra le armature del condensatore è data da:
(3.49)
Z
UC =
+∞
Z
V (q)dq =
V (t)i(t)dt =
0
Z
+∞
=
0
f 2τ
=
CR2
1
C
Z
0
+∞
Z
0
t
t0
t
t Z t
t0
Z +∞ 2
−
−
−
f −
f
f
e τ dt0 e τ dt =
e τ
e τ dt0 =
r
r
CR2
0
0
t
t
−
−
f 2τ τ 1 2
(1 − e τ )e τ dt =
τ
−
= Cf
CR2
2
2
che fa quadrare il bilancio energetico del circuito, infatti: L = UJ,R + UC .
Il Circuito LR. Questo circuito è l’analogo del precedente solo ponendo
un’induttanza al posto della capacità, ovvero:
R
f
L
l’equazione differenziale associata questa volta può essere scritta come:
(3.50)
iR = f − L
di
dt
3. LE CORRENTI
73
osserviamo subito che i(t) = f /R è una soluzione particolare, dunque ricavando la soluzione dell’omogenea in modo simile a come abbiamo fatto per
il caso RC otteniamo:
di
R
(3.51)
= − dt
i
L
L
ponendo questa volta il tempo caratteristico come τ = R
, abbiamo che una
famiglia di soluzioni per l’equazione è data da:
t
−
f
(3.52)
i(t) = Ae τ +
R
per fissare la costante A è sufficiente imporre la condizione iniziale i(0) = 0,
per cui:
f
f
(3.53)
0 = i(0) = A + ⇔ A = −
R
R
t
−
f
1 − e τ , possiamo ora calcolare la potenza erogata
dunque i(t) = R
dalla pila come:
(3.54)
W = fi =
di
Ri + L
dt
i = Ri2 + Li
di
1 f2
= Ri2 + L 2
dt
2 R
abbiamo scritto il secondo termine considerando che:
Z +∞
Z f
R
di
1 f2
(3.55)
Li dt =
Lidi = L 2
dt
2 R
0
0
in realtà dalla definizione di induttanza abbiamo che in generale:
niS
N 2i
N2
ϕ(B)
=
=µ
S=µ
S = µn2 Sl
i
i
li
l
abbiamo quindi che l’energia immessa nell’induttanza è:
(3.56)
L=
1
f2
UL = µn2 Sl 2
2
R
da cui possiamo ricavare la densità di energia del campo magnetico come:
dUL
1
1
1
(3.58)
uM = 3 = µn2 i2∗ = (ni∗ )(µni∗ ) = H · B
d x
2
2
2
ovvero ritrovare l’espressione per l’energia elettromagnetica come:
1
1
(3.59)
E = H ·B+ D·E
2
2
Il Circuito CL. Consideriamo questa volta un condensatore, su cui è
posta una carica q0 al tempo t0 , in serie ad una induttanza L:
(3.57)
C
L
74
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
l’equazione differenziale associata è data da:
Q
di
(3.60)
0=
+L
C
dt
ricordando che la carica è l’integrale della corrente, possiamo riscrivere la
precedente come:
Z
di
1 t 0 0
i(t )dt − i = 0
(3.61)
C 0
dt
che possiamo riscrivere come18:
Q(t)
(3.62)
+ L¨(Q)(t) = 0
C
1
otteniamo l’equazione Q̈ + ω 2 Q = 0, che ha
ponendo la pulsazione ω = √LC
come integrale generale:
(3.63)
Q(t) = A cos(ωt + ϕ)
imponendo le nostre condizioni iniziali otteniamo:
Q(t) = q0 cos(ωt) ⇒ i(t) = −ωq0 sin(ωt)
(3.64)
abbiamo sostanzialmente costruito un ”pendolo elettrico”, in modo simile a
quanto fatto per i due casi precedenti possiamo ottenere il seguente bilancio
energetico:
(3.66)
1 Q2
1 q02
=
cos2 (ωt)
2 C
2C
1
1 2 2
1
q sin (ωt)
= Li2 = Lω 2 q02 sin2 (ωt) =
2
2
2C o
UE =
(3.65)
UM
q2
ovvero: UE + UM = 2C0 .
Il Circuito RLC. Poniamo questa volta in serie un generatore di corrente alternata, una resistenza, un’induttanza ed una capacità. Schematizziamo il generatore di corrente alternata come un potenziale variabile nel
tempo con la legge: v(t) = VG cos(ωt + φV ), abbiamo:
R
v(t)
L
C
per cui otteniamo la seguente equazione differenziale:
Z
di(t)
1 t 0 0
(3.67)
v(t) = Ri(t) + L
+
i(t )dt
dt
C 0
derivandola rispetto al tempo otteniamo:
(3.68)
dv
di
d2 i
1
= R + L 2 + i(t)
dt
dt
dt
C
18Adottando il simbolo di Newton per la derivata globale rispetto al tempo.
3. LE CORRENTI
75
la soluzione dell’omogenea rappresenta il transiente, mentre la soluzione dell’equazione completa ci darà la soluzione a regime. Stiamo cercando una
soluzione del tipo i(t) = I cos(ωt + φI ), è conveniente riscrivere il potenziale
come parte reale19 di un numero complesso20, ovvero:
~ ejωt )
(3.69)
v(t) = Re Vg ej(ωt+φ) = Re Vg ejφ ejωt = Re(V
omettiamo da ora in poi il simbolo parte reale ricordandoci solo che per
passare dalla notazione maiuscola a quella minuscola bisogna applicare la
funzione parte reale. Con questa nuova notazione la soluzione che stiamo
cercando diventa: i(t) = I~M ejωt con I~M = ejφI . Possiamo ora risolvere
l’equazione differenziale, cerchiamo in primo luogo una soluzione particolare
della disomogenea sfruttando la forma appena scritta:
~ ejωt = −ω 2 LIe
~ jωt + jω IRe
~ jωt + 1 Ie
~ jωt
(3.70)
jω V
L
dividendo per jωejωt otteniamo:
ω ~ ~
1 ~
j
~
~ I~
(3.71)
V = − LI + IR +
I = jωl + R −
I~ = Z
j
jωC
ωC
abbiamo trovato una simil-legge di Ohm che ci suggerisce di dare le seguenti
definizioni:
~
Definizione
+
3.12. Definiamo impedenza complessa il valore Z := R
1
1
e
j ωL − ωL , ritroviamo la resistenza R, la reattanza capacitiva ωC
la reattanza induttiva ωL.
q
~ = R2 + (ωL − 1 )2 = |V~ | = VG , possiamo dunque scrivere
Inoltre |Z|
~
ωC
IM
|I|
~ = |Z|e
~ jϕ dove:
Z
1
ωL − ωC
= φV − φI
R
poichè R > 0 abbiamo che − π2 < ϕ < π2 .
Questo ci porta ad analizzare i tre casi singoli:
(3.72)
v(t)
ϕ = tan−1
R
~ =R
Z
v(t)
~
V
~
R
L
~ = jωL
Z
v(t)
I~ =
I~ =
~
V
jωL
=
VG − π2 j
ωL e
C
~ = −j 1
Z
ωC
π
I~ = VG ωCej 2
19Avremmo potuto scegliere parte immaginaria, è una pura questione di convenzione.
20Usiamo per l’unità immaginaria il simbolo j per non confonderlo con la corrente.
76
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
Possiamo ora tornare a studiare il caso da cui eravamo partiti, abbiamo
dunque trovato la soluzione particolare come:
VG
(3.73)
IM = q
1 2
R2 + (ωL − ωC
)
1
ovvero, a regime, abbiamo un massimo quando ωL = ωC
, cioè per ω 2 LC = 1,
p
ovvero per ω = ωR = (LC)−1 , otteniamo il cosiddetto fattore di risonanza, l’impedenza è diventata puramente resistiva. La corrente viaggia
tra induttanza e condensatore, mentre generatore e resistenza mantengono
costante l’energia che arriva al condensatore.
Il Circuito Generico. Siamo ora interessati a dire qualcosa di valido
in generale per i circuito in corrente alternata, ovvero per la generica coppia
in serie di un generatore e un’impedenza:
v(t)
Z
Per questo caso abbiamo che v(t) = V0 cos(ωt + φV ) e i(t) = I0 cos(ωt + φI ),
poniamo φV = 0 e φI = ϕ, abbiamo anche scoperto che I0 = VZ0 ovvero che
ZI0 = V0 , calcoliamo la potenza istantanea scambiata dal generatore con il
carico Z, questa è:
W (t) =V (t)i(t) = ZI02 cos(ωt) cos(ωt + ϕ) =
(3.74)
=ZI02 cos2 (wt) cos(ϕ) − ZI02 cos(ωt) sin(ωt) sin(ϕ) =
=P (t) + Q(t)
dove abbiamo definito:
Definizione 3.13. Potenza reale la quantità:
(3.75)
P (t) = ZI02 cos2 (wt) cos(ϕ)
Potenza reattiva la quantità:
sin(2ωt)
sin ϕ
2
Calcoliamo il valore medio su un periodo T della potenza reale, questo
(3.76)
Q(t) = ZI02
è:
< P (t) >T = Z0 I02 < cos2 (ωt) >T cos(ϕ) =
Z0 I02
cos ϕ = Vef f Ief f cos(ϕ)
2
dove abbiamo definito:
Definizione 3.14. Potenziale efficace la quantità:
√
V0
(3.77)
Vef f = < V 2 > = √
2
Corrente efficace la quantità:
√
I0
(3.78)
Ief f = < I > = √
2
Fattore di potenza la quantità cos(ϕ).
3. LE CORRENTI
77
Osserviamo che il fattore di potenza rappresenta l’angolo di fase tra la
tensione e la corrente. Per quanto riguarda il valor medio su un periodo T
della potenza reattiva abbiamo che questo è < Q(t) >T = 0, mentre il suo
massimo è:
ZI02
(3.79)
QM =
sin(ϕ)
2
che ci porta alla seguente definizione:
Definizione 3.15. Si chiama potenza apparente la quantità:
q
(3.80)
< P (t) >2T +QM = Vef f Ief f
I Trasformatori Statici.21 Il trasformatore più semplice è costituito
da due conduttori elettrici (solenoidi) avvolti su un anello di materiale ferromagnetico detto nucleo magnetico. L’avvolgimento al quale viene fornita
energia viene detto primario, mentre quello dalla quale l’energia è prelevata è detto secondario (vedi fig. 17). Quando sul primario viene applicata
Figura 17. Trasformatore Statico.
una tensione elettrica alternata sinusoidale, per effetto dell’induzione magnetica si crea nel nucleo un flusso magnetico con andamento sinusoidale.
Per la legge di Faraday-Neumann-Lenz, questo flusso variabile induce nel
secondario una tensione sinusoidale. La tensione prodotta nel secondario è
proporzionale al rapporto tra il numero di spire del primario e quelle del
secondario secondo la relazione:
Vp
Np
=
= k0
(3.81)
Vs
Ns
dove Vp è la tensione applicata sul primario, Vs la tensione indotta sul secondario, Np il numero di spire del primario e Ns il numero di spire del
21Fonte: Wikipedia
78
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
secondario, k0 è chiamato rapporto di trasformazione. Per una tensione
sinusoidale di ampiezza massima Em il valore efficace è E = Em /sqrt2.
Trascurando le perdite, la relazione tra tensione, numero di spire, intensità
di flusso e sezione del nucleo è data dalla relazione:
ω
2π
(3.82)
E = √ N SB = √ f N SB = 4, 44f N SB
2
2
Dove E è il valore efficace della tensione indotta, f è la frequenza in Hertz,
N è il numero di spire dell’avvolgimento al quale si fa riferimento, S è la
sezione del nucleo (in m2 ) e B è il valore dell’induzione in Tesla.
Circuiti RC in alternata. Vogliamo ora concentrare la nostra attenzione sui circuiti formati da un generatore di corrente alternata sinusoidale
v(t) = Vg cos(ωt + φ), una resistenza ed un condensatore posti in serie:
R
v(t)
C
per i quali l’equazione differenziale risulta essere:
Z
1 t 0 0
i(t )dt
(3.83)
v(t) = Ri +
C 0
abbiamo già calcolato una soluzione per l’equazione omogenea quando abbiamo trattato il circuito in corrente continua, dunque possiamo immediatamente scrivere una soluzione della completa come:
(3.84)
t
V0 −
i(t) =
e τ + I cos(ωt + φ)
R
dove abbiamo usato la solita convenzione per cui Vc = V0 ejωt . Possiamo
scrivere il campo elettrico totale del sistema come E = E 1 +E 2 , cioè il campo
elettrico tra le piastre del condensatore22, calcoliamo in primo luogo la parte
E 1 dovuta alla variazione di corrente imposta dal generatore, al termine di
questo calcolo risulterà chiaro il perché abbiamo introdotto anche un termine
E 2 . Per E 1 possiamo scrivere subito che E 1 = E0 ejωt , ora questo è un campo
variabile nel tempo, dunque, dalle equazioni di Maxwell, genererà un campo
magnetico B 1 il cui modulo possiamo esprimere come:
1
1
∂E
|B 1 | =
ΦS (∇×B) =
Φ S µ 0 ε0
=
2πr
2πr
∂t
(3.85)
1 ∂E
1
=
S=
jωrE0 ejωt
2
2πrc ∂t
2πc2
dove abbiamo usato il flusso del rotore di B concatenato alla superficie S
del condensatore, questo campo magnetico è a sua volta variabile, poiché
22Per portare avanti i calcoli consideriamo il condensatore piano, questo non è tuttavia
strettamente necessario. Si potrebbero fare i calcoli in tutta generalità, ma allungheremmo
molto.
4. POTENZIALI RITARDATI E ANTENNE
79
oscilla sui piani orizzontali del condensatore, dunque possiamo imporre:
∂B
(3.86)
∇×E = −
∂t
che ci mostra la necessarietà dell’aver introdotto un campo E 2 , per calcolarlo
consideriamo di essere nella situazione della figura 18, integrando lungo un
Figura 18. Circuito RC corrente alternata
circuito fittizio che ricopre il profilo del condensatore otteniamo:
Z r Z h
jωx
∂
dx
dy 2 E0 ejωt
(3.87)
− E2 h = −
∂t 0
2c
0
ovvero abbiamo che:
Z r
2 r
2
∂
jωx
∂ jω
ω2
jωt
jωt x jωt r
E2 = −
E
e
dx
=
−
E
e
E
e
=
−
0
0
∂t 0 2c2
∂t 2c2
2 0
2c2 0
2
Possiamo quindi scrivere per E 2 :
E2 = −
(3.88)
2
ω2
jωt r
E
e
0
2c2
2
quindi possiamo scrivere:
ω2 2
r E 0 ejωt
4c2
ma dipende ancora dal tempo, dunque questo genera un campo magnetico,
che ne genera uno elettrico e cosı̀ via... guardando con attenzione la struttura
del campo elettrico possiamo riconoscere la funzione di Bessel di ordine 0.
Se poniamo infatti X = ωr
c abbiamo che:
(3.89)
E = E 0 ejωt −
(3.90)
J0 (X) =
+∞
X
(−1)k x 2k
(k!)2 2
k=0
che ci permette di scrivere E = E 0 J0 (X)ejωt .
4. Potenziali Ritardati e Antenne
Abbiamo risolto fino ad ore le equazioni dei potenziali scegliendo per ρ
e j delle funzioni che non dipendono dal tempo, ovvero delle soluzioni del
tipo:
Z
Z
j(r0 ) 3 0
1
ρ(r0 ) 3 0
µ0
(4.1)
φ(r) =
d x A(r) =
d x
4πε0 D |r − r0 |
4π D |r − r0 |
80
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
cosa accade se cariche e sorgenti dipendono dal tempo? La costruzione delle
soluzioni col metodo delle funzione di Green funziona ancora e otteniamo
semplicemente:
Z
Z
j(r0 , t) 3 0
1
ρ(r0 , t) 3 0
µ0
(4.2)
φ(r, t) =
d
x
A(r,
t)
=
d x
4πε0 D |r − r0 |
4π D |r − r0 |
tuttavia in questo modo non stiamo tenendo conto della velocità di propagazione
degli effetti del campo, per quanto abbiamo visto sulle onde è necessario che
trascorra del tempo affinché l’effetto del campo si propaghi a riempire tutto lo spazio a disposizione. Essendo c la velocità della luce, abbiamo che il
potenziale dipende in realtà da ciò che è accaduto ∆r/c secondi fa, possiamo
quindi definire i seguenti:
Definizione 4.1. Si definiscono potenziali ritardati le due seguenti funzioni della posizione e del tempo:
Z
1
ρ(r0 , t − ∆r/c) 3 0
(4.3)
d x
φ(r, t) =
4πε0 D
|r − r0 |
Z
j(r0 , t − ∆r/c) 3 0
µ0
(4.4)
d x
A(r, t) =
4π D
|r − r0 |
Questo, che sembra un innocuo cambiamento, produce modifiche notevoli
nella teoria. Per cominciare a vedere questi effetti torniamo a studiare il caso dell’antenna costruita mediante il circuito RC in continua. Costruiremo
in realtà un modello approssimato del fenomeno, ovvero ci ridurremo ad
uno schema poco realistico, ma che permette di fare delle previsioni che
sono in buon accordo con i dati sperimentali. Ciò che considereremo accadere sulle piastre del condensatore è uno spostamento della carica ogni
mezzo periodo. Ovvero ogni mezzo periodo la carica migra da un’armatura
all’altra del condensatore. Studiamo quindi il seguente modello (vedi fig.
19), una carica +q che oscilla lungo l’asse ẑ attorno ad un punto di equilibrio, chiamiamo r il vettore posizione del punto in cui vogliamo considerare
il potenziale, conseguentemente il campo, e r0 la distanza dalla carica da
questo punto, supponiamo inoltre che r >> r0 , cioè che r − r0 ' r, in questa
approssimazione possiamo scrivere il potenziale magnetico come:
Z
Z
j r0 , t − ∆r
j r0 , t − rc 3 0
µ0
µ0
c
3 0
A(r, t) =
d x =
d x =
4π D
∆r
4π D
r
(4.5)
Z
µ0 ρv t − rc
µ0 v
3 0
ρd x =
=
4π r D
4π
r
Detto P = qz abbiamo che j = Ṗ con la v al tempo ritardato, dunque
possiamo riscrivere il potenziale come:
µ0 ṗ t − rc
(4.6)
A(r, t) =
4π
r
per calcolare il potenziale scalare sfruttiamo la Gauge di Lorentz (vedi eq.
1.5), cioè:
(4.7)
∇·A = −
1 ∂φ
c2 ∂t
4. POTENZIALI RITARDATI E ANTENNE
81
Figura 19. Modello di antenna di tipo RC
prima di calcolare l’integrale di φ calcoliamo preliminarmente le due seguenti
quantità che ci aiuteranno nel conto, indicheremo con t0 il tempo ritardato:
!
∂ Ṗx ∂ Ṗy
∂ Ṗz
1
∂t0
∂t0
∂t0
+
+
=
+ P̈y
+ P̈z
P̈x
∂x
∂y
∂z
r
∂x
∂y
∂z
1
1 ∂r
1 ∂r
1 ∂r
=
P̈x −
+ P̈y −
+ P̈z −
=
r
c ∂x
c ∂y
c ∂z
!
1
1 P̈ · r
1 P̈ · r
−
=−
=
r
c r
c r2
1
1
∇·Ṗ =
r
r
(4.8)
Il seguente è un calcolo che abbiamo già eseguito più volte, ma:
(4.9)
1
∂ 1
1
∇ =
∇r = − 2
r
∂r r
rr
x
y
z
î + ĵ + k̂
r
r
r
=−
r
r3
possiamo a questo punto scrivere la divergenza di A come:
(4.10)
µ0
∇·A =
4π
1
1
∇Ṗ + Ṗ ∇
r
r
µ0
=
4π
1 P̈ · r Ṗ · r
−
− 3
c r2
r
!
82
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
Ovvero possiamo scrivere il potenziale scalare come:
Z
Z
∂φ
φ(r, t) =
dt = −c2 ∇·Adt =
∂t
!
Z
1 P̈ · r Ṗ · r
2 µ0
−
=−c
− 3
dt =
4π
c r2
r
(4.11)
!
i
1 Ṗ · r P · r
1 1 h
r
1
+
=
P
·
r
+
Ṗ
·
r
=
4πε0 c r2
r3
4πε0 r3
c
r
1 1
P + Ṗ · r
=
3
4πε0 r
c
dove P + rc Ṗ è una funzione del tempo ritardato che chiamiamo P∗ . Con
quest’ultimo rappresentiamo il dipolo all’istante t più il dipolo corretto dal
tempo, stiamo ”praticamente” ricostruendo la funzione in modo simile allo sviluppo con Taylor. Ora non ci resta che calcolare le espressioni per
i campi. Cominciamo dal campo elettrico, dall’equazioni dei potenziali
possiamo scrivere:
1
∂A
1
r µ0 ∂ Ṗ
E = − ∇φ −
=−
∇ 3 P + Ṗ · r −
=
∂t
4πε0
r
c
4π ∂t r
(" #)
1
1 r 1 ∂ Ṗ
=−
∇ 3 P + Ṗ · r + 2
=
4πε0
r
c
c ∂t r
!
!
r
Ṗ
·
r
P ·r
1
∂
Ṗ
1
∇
+∇ c 3
+ 2
=
=−
4πε0
r3
r
c ∂t r
r
r
1
r
P
1
(4.12)
=−
(∇P ) 3 + 3 ∇r + (P · r) ∇ + ∇
· P 3+
4πε0
r
r
r
c
r
!
r
Ṗ
r
1
1 P̈
+ c 3 ∇r + Ṗ · r∇ 3 +
= ... =
r
c
r
c r
=
1
− P∗ + 3(P∗ · r)r + 1 (P̈ × r) × r
5
4πε0 | r
c2
r3
{z r
}
Momento di dipolo di P∗
Abbiamo quindi ottenuto che il campo elettrico risulta essere la sovrapposizione di tre effetti, per una distanza r ' r0 siamo in in una situazione in cui
possiamo praticamente ignorare il dipolo che oscilla, per r > r0 ci troviamo
in una situazione di campo vicino ovvero vediamo il campo generato da
un dipolo variabile nel tempo, per r >> r0 siamo nel range di quello che si
dice campo di radiazione.
Campo Vicino. La legge temporale al tempo t-ritardato per il dipolo,
in situazione di campo vicino, può essere scritta come P∗ = P t − rc +
r
r
r
r
c Ṗ t − c ' P (t) − c Ṗ (t) + c Ṗ (t) ' P (t), ovvero il ritardo vicino alla
sorgente è trascurabile e come avevamo già osservato tutto sembra essere un
dipolo variabile.
4. POTENZIALI RITARDATI E ANTENNE
83
Campo di Radiazione. A grandi distanza diventa dominante il termine:
1 (P̈ × r) × r
c2
r3
che diventa quindi sostanzialmente l’elemento che genera il campo di radiazione, si noti che questo asintoticamente si comporta come 1r e per r →
+∞ diventa il termine dirimente dell’espressione calcolata, se scriviamo per
P = p0 cos(ωt) abbiamo che Ṗ = −p0 ω sin(ωt), dunque per effetto del ritardo l’oscillazione temporale è diventata anche un’oscillazione spaziale, cioè
per t fissato si registra un’oscillazione del campo nello spazio. Il campo di
radiazione va come la tangente alla sinusoide, che per alte frequenze risulta
essere un valore notevole, in questo modo possiamo giustificarne l’andamento
asintotico.
(4.13)
Nota 9. Non c’è creazione di energia, poiché ci sono zone in cui il campo
vale zero, in questo modo l’integrale dell’energia resta costante. Abbiamo
in realtà modificato solo la distribuzione dell’energia.
Nota 10. E t − rc soddisfa le equazioni di D’Alambert, dunque si propaga
come un’onda.
Possiamo ora procedere al calcolo del campo magnetico B associato.
Dall’equazioni per i potenziali abbiamo che B = ∇×A, calcoliamo preliminarmente la seguente quantità:
1
∂ Ṗk
∂ Ṗk
1 ∂
∂
(∇×Ṗ )i =
= P̈k −
r=
−
r + P̈j
∂xj
∂xk
c ∂xj
c ∂xk
P̈j xk
P̈k xj
1 (4.14)
=−
+
=
P̈j xk − P̈k xj =
c r
c r
rc
1
1 P̈ × r =
P̈ × ∇r
=
rc
c
i
i
possiamo dunque scrivere che:
1
P̈ × ∇r
c
e, a questo punto, calcolare il campo di induzione magnetica come:
!
µ0 Ṗ
µ0
1
1
=
(∇×Ṗ ) + ∇ × Ṗ =
B =∇×A = ∇×
4π r
4π
r
r
1 1
1
r
r
(4.16)
=
P̈ × ∇r + ∇ × Ṗ =
P̈ ×
− ∇ 3 × Ṗ =
rc
r
rc
r
r
µ0 h
r ri
=
Ṗ + P̈ × 3
4π
c
r
per il campo vicino sviluppiamo P in serie attorno a zero e otteniamo:
r
(4.17)
Ṗ = ṗ(t) − P̈ + · · ·
c
r
(4.18)
P̈ = 0 + P̈ + · · ·
c
(4.15)
∇×Ṗ =
84
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
dunque a corto range abbiamo la seguente espressione di B:
B'
(4.19)
µ0 Ṗ × r
4π r3
cioè abbiamo ritrovato la legge di Biot-Savart per r → 0. Per il campo
lontano, cioè per r → +∞ abbiamo che:
B'
(4.20)
µ0 1 P̈ × r
4π c r2
cioè l’espressione del campo di radiazione magnetica, dunque anche il campo
magnetico lontano si comporta come un’onda. Studiamo ora la relazione tra
campo elettrico e magnetico lontano, possiamo riscrivere E come:
1 1 (P̈ × r)
µ0 P̈ × r
×r =
× r̂ =
4πε0 c2 r3
4π r2
µ0 P̈ × r
=c
r̂ = cB × r̂
4πc r2
E'
(4.21)
Cioè detta k la direzione di propagazione dell’onda e stante la relazione
appena trovata, E = cB × r̂ abbiamo la situazione in figura 20, cioè le onde
Figura 20. Onda elettromagnetica prodotta da un dipolo oscillante.
elettromagnetiche possono essere immaginate come delle onde trasverse dei
campi elettrici e magnetici. In questo caso come un’onda piana polarizzata
linearmente che si propaga lungo la direzione k̂, con il campo elettrico in un
piano verticale e quello magnetico in uno orizzontale.
Effetto di un’onda elettromagnetica su una carica. Siamo ora
interessati a scoprire cosa accade quando un’onda di questo tipo colpisce
una carica q libera di muoversi, esercita una forza? Il moto della carica
è perturbato? Per rispondere a queste domande fissiamo un sistema di
riferimento con asse ẑ k k̂ e assi ŷ lungo la direzione di B e x̂ lungo la
direzione di E. In questo modo otteniamo che i vettori si scrivono come
E = (E, 0, 0), B = (0, B, 0) e k = (0, 0, k). Possiamo calcolare la forza
esercitata sulla carica q come F = q (E + v × B), vediamo, in primo luogo
se c’è variazione di energia cinetica in un intervallo di tempo infinitesimo:
(4.22)
dT
dL
=
= W = F · v = q(E + v × B) · v = jE
dt
dt
4. POTENZIALI RITARDATI E ANTENNE
85
studiamo ora la variazione della quantità di moto p lungo i tre assi:
dpx
= F x = qE x + (j y B z − j z B y ) = qE x − j z B y
dt
dpy
= F y = qE y + (j z B x − j x B z ) = 0 + 0 = 0
dt
(4.23)
(4.24)
(4.25)
dpz
dt
= F z = qE z + (j x B y − j y B x ) = 0 + j x B y = j x B y
passando ai moduli e considerando che E = cB abbiamo:
dpx
vz
vz (4.26)
= qE − q E = q 1 −
Ex ' qEx
dt
c
c
cioè un moto armonico con un termine di forzamento, per la componente z
invece:
dpz
(4.27)
dt
= qvx
Ex
W
=
c
c
è quindi proporzionale alla quantità di energia cinetica ceduta. Mettendo
insieme questi due risultati abbiamo scoperto che la carica oscilla
la
D ∂p lungo
E
x
direzione x̂ e avanza lungo l’asse ẑ, per i valori medi abbiamo che ∂t
=0
T
poichè deriva
D ∂p E da un’onda monocromatica, cioè va come il seno o il coseno,
= <Wc>T 6= 0 poiché W ∝ Ex2 .
mentre ∂tz
T
Fatto 4. L’onda elettromagnetica trasposta sia l’energia cinetica che la
quantità di moto23.
Risolto il problema per una particella possiamo dedicarci all’effetto dell’onda su un dominio D dello spazio, riprendiamo la definizione di quantità
di energia che avevamo già dato:
1
1 2
B2
u = ε0 E 2 +
B = ε0 E 2 =
2
2µ0
µ0
(4.28)
studiamo la variazione in D, non tempo dipendente, al passaggio dell’onda
elettromagnetica, cioè studiamo la quantità:
Z
Z
Z
d
∂u 3
∂E
1
∂B 3
∂E
3
=
ud x =
d x=
ε0 hE,
i + hB,
id x =
∂t dt D
∂t
∂t
µ
∂t
0
D
D
Z
1
1
=
ε0 hE,
(∇×B) − ji + hB, −∇×Eid3 x =
ε µ
µ0
0 0
ZD
∇×B
1
(4.29)
=
E·
− j − B · ∇×Ed3 x =
µ
µ0
0
ZD
Z
3
=
E · ∇×H − H · ∇×Ed x −
j · Ed3 x =
D
D
Z
Z
3
=−
∇·(E × H)d x −
j · Ed3 x
D
D
23Potremmo introdurre a questo punto un tensore energia-impulso, ma non lo faremo.
86
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
Definizione 4.2. Definiamo vettore di Poynting la quantità di energia trasportata dalla radiazione elettromagnetica per unità di tempo e di
superficie:
(4.30)
S =E×H =
E×B
µ0
dunque possiamo scrivere:
Z
Z
∂E
2
j · Ed3 x
(4.31)
S · n̂d x −
=−
∂t
D
∂D
dove l’integrale superficiale del vettore di Poynting rappresenta il flusso della
quantità di energia che abbandona il volume e l’integrale di volume del
prodotto di j · E rappresenta l’energia persa dall’onda dentro il volume per
accelerare le cariche al suo interno.
Riscriviamo questa relazione in maniera locale, cioè per un volume infinitesimo:
∂E
d3 x
∂u
(4.32)
dE = ud3 x ⇒
=u
=
∂t
dt
∂t
cioè:
∂u
= −∇·S − j · E
(4.33)
∂t
diamo ora la seguente definizione:
Definizione 4.3. Si definisce intensità di un’onda la quantità di energia
che in un tempo infinitesimo attraversa la superficie infinitesima perpendicolare alla direzione di propagazione dell’onda:
dtd2 x
cε0 E 2
(4.34)
I=u
=
uc
c
2
dtd2 x
µ0 B
Per come abbiamo definito il vettore di Poynting l’intensità di un’onda
può essere vista come il flusso di quest’ultimo attraverso la superficie ∂D,
ovvero:
S · n̂d2 x
(4.35)
Φ∂D (S) =
= |S| = |E||H| = uc
d2 x
abbiamo quindi scoperto che il flusso del vettore di Poynting rappresenta
l’energia trasportata da un’onda e poiché:
S
E
k̂ =
c
c
in definitiva possiamo quindi scrivere, in un sistema privo di cariche:
Z
∂E
(4.37)
=−
S · n̂d2 x
∂t
∂D
(4.36)
E → |S| si ha che p =
calcoliamone il valore medio per il dipolo oscillante da cui eravamo partiti,
ovvero h ∂E
∂t iT , per farlo calcoliamo prima le quantità:
(4.38)
P (t) = p0 sin(ωt)
(4.39)
(4.40)
Ṗ (t) = ωp0 cos(ωt)
2
P̈ (t) = −ω p0 sin(ωt) = −ω 2 P (t)
4. POTENZIALI RITARDATI E ANTENNE
87
usando le formule per E e B calcolate all’inizio otteniamo la formula di
Larmor:
dE
1
(4.41)
h iT =
ε0 cqa2
dt
6π
dove a2 corrisponde alla quarta potenza della frequenza.
4.1. Cavi Schermati. Per introdurre i cavi schermati partiamo dal
considerare una catena infinita di impedenze del tipo:
Z1
Z1
Z1
A
Z2
Z2
Z2
B
l’impedenza complessiva vista ai capi A e B del circuito risulta essere:
r
z2
z1
(4.42)
z0 =
+ z 1 z2 + 1
2
4
si può vedere riducendo tutto il cavo a quello equivalente con impedenza
z0 e aggiungerci in testa, o in coda, uno degli elementi della serie con z1
e z2 se si calcola allora l’impedenza equivalente si ottiene questo risultato.
Specializziamo il risultato che abbiamo ottenuto al seguente caso:
jωL
jωL
A
1
jωC
v(t)
B
possiamo quindi scrivere per l’impedenza risultante:
s
r
1
(jωL)2
L (ωL)2
(4.43)
z0 = jωL
+
=
−
jωC
4
C
4
l’impedenza dipende sostanzialmente dal valore della frequenza, dunque
possiamo imporre:
(4.44)
L (ωL)2
2
−
=0⇔ω= √
C
4
LC
e abbiamo trovato il valore ωc per cui si annulla l’impedenza z0 , in questo
modo tutto il circuito si comporta come una induttanza di impedenza L2 .
Se ω > ωc abbiamo impedenza puramente immaginaria, mentre se ω < ωc
siamo nel caso di un’impedenza puramente reale. Ovvero nel secondo caso
abbiamo ottenuto una resistenza, cioè abbiamo costruito un circuito in continua che non oscilla e assorbe sempre corrente. Di fatto ogni condensatore
di questo sistema si deve caricare e questo fa sı̀ che il segnale si propaghi
lungo il cavo. Poiché il processo è infinito il generatore deve continuare
88
3. ELETTROMAGNETISMO IN PRESENZA DI MATERIALI
ad erogare corrente, l’energia immessa si conserva tra le piastre dei condensatori e nei campi magnetici delle induttanze. Abbiamo appena costruito un
circuito di passa basso, cioè un circuito per cui passano tutte le frequenze
ω < ωc . La propagazione non avviene per ω > ωc dunque l’impedenza si
comporta da induttanza e il segnale non si propaga. Per ogni blocco del
cavo possiamo imporre la relazione Vn = In z0 , quindi In z1 = Vn − Vn+1 ma
Vn − Vn+1 = Vz0n z1 = Vn zz10 ovvero Vn+1 = αVn , cioè Vn = αV0 dove V0 è la
differenza di potenziale del generale e:
q
jωL
L
ω 2 L2
z0 − z1
C − 4 − 2
(4.45)
α=
=q
z0
jωL
L
ω 2 L2
C − 4 + 2
dunque per il caso ω > ωc la radici danno luogo ad immaginari puri ed
α diventa un numero reale puro più piccolo di 1. Se α = 1, cioè ω < ωc
otteniamo un circuito ideale non dissipativo.
Possiamo a questo punto ottenere le equazioni fondamentali delle linee
di trasmissione:
∂V
∂I
∂2V
∂2V
∂x = −L0 ∂t ⇔
−
L
C
=0
(4.46)
0
0
∂I
∂V
∂x2
∂t2
∂x = −C0 ∂t
cioè abbiamo riottenuto l’equazione di D’Alambert 1-dimensionale. Al fondo
di questo cavo possiamo attaccare un carico e ottenere un cavo di trasmissione, lasciarlo aperto e ottenere un’antenna, oppure chiuderlo e far rimbalzare il sistema indietro.
CAPITOLO 4
Ottica
√
Abbiamo osservato che c = ε0 µ0 −1 , possiamo quindi dire che in un
mezzo omogeneo ed uniforme la velocità di propagazione dell’onda è:
(0.47)
v=√
1
c
c
=√
=
ε0 µ 0 εr µ r
εr µ r
n
dove chiamiamo n indice di rifrazione, osserviamo che per il vuoto vale
n = 1. Le onde elettromagnetiche si trasmettono solo nei materiali para/diamagnetici, cioè per valori di µ ' 10−4 , i paramagnetici, e di µ ' −10−4 ,
√
dunque, in prima approssimazione, possiamo porre n ' εr . Ora, in generale, si ha che n è una funzione di ω, dunque dipende fortemente dalla
frequenza di oscillazione del campo, ovvero è maggiore per campi statici
e molecole qualsiasi, oppure per frequenza particolari e molecole con bassa inerzia. Altrimenti la molecola ”fa fatica” a seguire gli spostamenti del
campo.
Cerchiamo di ricordare cosa accade al campo elettromagnetico in presenza di cambi di materiale e ricostruiamo da quelle relazioni delle informazioni
sulle onde. Ripartiamo dall’eq. di Maxwell per il caso dinamico in presenza
di materia:
∇·D = ρ ∇×E = − ∂B
∂t
(0.48)
∇·B = 0 ∇×H = j + ∂D
∂t
indaghiamo ora la continuità delle componenti del campo al passaggio tra
due materiali. Per approssimazione infinitesima possiamo ridurci a considerare solo onde piane e superfici come localmente piane. Sfruttando il Teorema
di Gauss consideriamo una superficie cilindrica di altezza h a cavallo della superficie di separazione dei due materiali, in questo modo, per h → 0
possiamo scrivere per il vettore induzione magnetica:
(0.49)
ΦS (B) = (B ⊥,1 − B ⊥,2 )d2 x = 0 ovvero B ⊥,1 = B ⊥,2
mentre per il vettore spostamento abbiamo:
(0.50)
ΦS (D) = (D⊥,1 − D⊥,1 )d2 x = σd2 x ovvero D⊥,1 − D⊥,1 = σ
dove σ rappresenta lo strato di carica localizzata sulla superficie contenuta
nel cilindretto. Abbiamo riscoperto che un campo elettrico che attraversa una superficie ha una discontinuità data dalla distribuzione di carica
localizzata sulla superficie.
Consideriamo ora un circuito rettangolo di altezza h e lunghezza dl disposto a cavallo della superficie di separazione dei materiali di modo che
h sia perpendicolare a tale superficie, sfruttiamo il Teorema di Ampere e
89
90
4. OTTICA
calcoliamo le due seguenti circuitazioni:
(0.51)
∇×E = E 1,k dl − E 2,k dl = (E 1,k − E 2,k )dl =
∂B
−
· n̂ hdl
∂t
ora se ∂B
∂t è una quantità finita, quando h → 0 otteniamo che E 1,k = E 2,k .
Procediamo similmente per il vettore campo magnetico e calcoliamo:
∂D
hdl
(0.52)
∇×H = (H 1,k − H 2,k )dl = j s +
∂t
dove j s è la corrente indotta sulla superficie che è l’unico luogo in cui è
diversa da zero. Possiamo quindi concludere che H 1,k − H 2,k = j s , ora se
la superficie è formata da un materiale dielettrico abbiamo che j S = 0 e
quindi H 1,k = H 2,k . Se fosse un conduttore avremmo tuttavia che questo
non potrebbe essere Ohmico, infatti:
l
(0.53)
R=ρ
S
ma per h → 0 si ha che S → 0, dunque, per controbilanciare il rapporto
e dare un valore finito ad R dovrebbe essere ρ → +∞. Possiamo quindi
concludere che la corrente j s si mantiene se e solo se la superficie è un
superconduttore. Nel resto dei casi abbiamo una corrente che si manifesta
solo per una quantità limitata di tempo. Riassumendo possiamo riscrivere
le seguenti quattro condizioni:
E 1,k − E 2,k = 0
D⊥,1 − D⊥,1 = σ
(0.54)
H − H 2,k = j s
1,k
B ⊥,1 − B ⊥,2 = 0
1. Rifrazione e Riflessione
Consideriamo due materiali con indice di rifrazione n diverso e un’onda piana, monocromatica e polarizzata linearmente, vogliamo studiare cosa
accade all’onda di vettore k i che incide sulla sulla superficie di separazione
tra i due materiali, si veda la figura 1, chiamiamo k r il raggio riflesso,
k t il raggio trasmesso, mentre siano θi , θr e θt gli angoli di incidenza,
riflessione e rifrazione o trasmissione, misurati tutti rispetto alla normale n̂ parallela alla direzione ẑ. Avevamo scritto la relazione E = cB tra
i moduli del campo elettrico e magnetico associati ad un’onda, in presenza
di materia possiamo modificarla semplicemente come E = vB, dove v rappresenta la velocità di propagazione dell’onda in questi materiali. Poiché
E, B, k formano una terna equiversa possiamo scrivere che:
(1.1)
E×B =
k̂
v
possiamo scrivere l’onda incidente come E i = E 1 ej(ki r−ωi t) e similmente la
riflessa e la trasmessa come E r = E 2 ej(kr r−ωr t+φr ) e E t = E 3 ej(kt r−ωt t+φt ) ,
sfruttando le relazioni di continuità che abbiamo appena ricalcolato possiamo scrivere che:
(1.2)
(E i + E r ) × n̂ − E t × n̂ = 0 ∀ t ∀P ∈ S sup. di separazione
1. RIFRAZIONE E RIFLESSIONE
91
Figura 1. Rifrazione e Riflessione
ovvero deve essere: (E i + E r − E t ) × n̂ = 0, scrivendo le espressioni delle
onde:
(1.3)
E 1 ej(ki r−ωi t) + E 2 ej(kr r−ωr t+φr ) − E 3 ej(kt r−ωt t+φt ) = 0
poiché si possa avere la relazione voluta è necessario che le fasi siano uguali,
dunque deve necessariamente essere:
(1.4)
0 = φr = φt
dunque la prima condizione è che le onde arrivino e partano tutte con la
stessa fase. L’altra condizione necessaria è che gli argomenti dei polinomi
siano uguali, cioè deve essere:
(1.5)
ωi = ωr = ωt = ω
questo implica necessariamente che le onde abbiano una lunghezza d’onda
differente, ora ν = T −1 dunque λ = vT ovvero v = λν, ma ω = 2πν dunque
ω
λ
ν = 2π
, cioè v = 2π
ω = ωk , possiamo quindi concludere:
2π
ω
abbiamo cioè scoperto, ricordando che E = ωk B:
λ1 = λi = λr
(1.7)
λ2 = λt
(1.6)
λ=v
non ci resta ora che esplicitare le quantità k · r, ora per z = 0 abbiamo che:
(1.8)
ki · r = kr · r = kt · r
poniamo gli assi in modo che ŷ k E, in questo modo abbiamo:
(1.9)
kix X = krx X + kry Y = ktx X + kty Y
92
4. OTTICA
dunque scrivendolo per componenti:
kix = krx = ktx
(1.10)
⇔ kix = ki sin θi = kr sin θr = kt sin θt
kry = kty
possiamo a questo punto, ricordando che ki = kr , formulare le due seguenti
leggi:
Teorema 1.1 (Leggi di Snell). Nella notazione usata sino ad ora:
(1) sin θi = sin θr
(2) ki sin θi = kt sin θt
Riscriviamo la seconda legge in funzione degli indici di rifrazione:
(1.11)
sin θt =
ki
n1
sin θi =
sin θi
kt
n2
Che ci suggerisce un’evenienza piuttosto particolare, ammettiamo di aver
trovato un angolo θ∗ , che chiamiamo angolo limite per cui sin θi = nn21 , ci
troviamo in un caso di onda evanescente, ovvero non c’è rifrazione, ma
solo riflessione, si vede facilmente che questo avviene per:
n2
(1.12)
θ∗ = sin−1
n1
Vogliamo ora capire cosa avviene per le intensità delle varie onde coinvolte. Ci troviamo sempre nel caso di onda piana, polarizzata linearmente
e monocromatica, dobbiamo ora fissare il piano su cui vibra E rispetto
alla normale al piano di incidenza, cominciamo dal caso in cui E vibra
trasversalmente rispetto ad k̂i . Ci mettiamo nell’ipotesi in cui σ = 0,
questo ci permette di usare la relazione D1,⊥ = D2,⊥ ovvero di scrivere
ε1 E 1,⊥ + ε1 E 2,⊥ = ε2 E 3,⊥ cioè ε1 (E 1,⊥ + E 2,⊥ ) = ε2 E 3,⊥ , fissiamo quindi la
prima relazione:
(1.13)
[ε1 (E 1 + E 2 ) − ε2 E 3 ] × n̂ = 0
Se supponiamo anche j s = 0 possiamo scrivere:
(1.14)
µ1 H 1 = B 1 =
n1
k̂ × E 1
c
cioè per tutti gli H:
n1
n1
n2
(1.15)
k̂1 × E 1 + k̂2 × E 2 − k̂3 × E 3 × n̂ = 0
µ1
µ1
µ2
che ci permette di scrivere:
n1
n1
(1.16)
n̂ ×
k̂i × E i = E i cos θi
µ1
µ1
ovvero, facendo lo stesso prodotto per le altri parti della formula:
n2
n1
(1.17)
(E i cos θi − E r cos θr ) − E t cos θt = 0
µ1
µ2
riunendo insieme le due relazioni abbiamo:
n1
µ1 (E i cos θi − E r cos θr ) −
(1.18)
ε1 (E 1 + E 2 ) − ε2 E 3 = 0
n2
µ2 E t cos θt
=0
2. INTERFERENZA E DIFFRAZIONE
93
Possiamo a questo punto scrivere la relazione che ci darà l’intensità dell’onda
come:
n1
n2
cos θi [E 1 − E 2 ] =
cos θt ε1 (E 1 + E 2 )
µ1
µ2
ε2 n 1
ε1 n 2
cos θi (E 1 − E 2 ) =
cos θt (E 1 + E 2 )
(1.19)
µ1
µ2
Z1 (1 − R) = Z2 (1 + R)
Z1 − Z2 = R(Z1 + Z2 )
La frazione di campo elettrico riflessa è dunque data da:
(1.20)
R=
Z1 − Z2
Z1 + Z2
La frazione di campo elettrico trasmessa è dunque data da:
(1.21)
T =1−R=
2Z1
Z1 + Z2
per il caso in cui ad essere trasverso è il campo magnetico i calcoli sono
del tutto analoghi. Si ottengono le stesse funzioni, ma con una diversa
definizione delle impedenze Z1 e Z2 .
2. Interferenza e Diffrazione
Ripartiamo dalla definizione di intensità luminosa:
Z
1
1 B2
2
(2.1)
I = cu = c
ε0 E +
=
S · n̂d2 x
2
2 µ0
σD
dove S è il vettore di Poynting, che ricordiamo essere S = E × H. Abbiamo,
quindi, che I ∝ E 2 , oppure I ∝ B 2 , con E e B campi associati all’onda.
Possiamo scrivere l’onda come:
(2.2)
ψ(u) = A(r, θ, ϕ)eju ove u = k · r ± ωt
e la parte reale di u rappresenta il campo elettrico dell’onda elettromagnetica. Possiamo quindi considerare I ∝ |ψ|2 , consideriamo, come al solito, ψ
piana, monocromatica, polarizzata linearmente e progressiva, cioè una funzione del tipo ψ = A cos(k · r ± ωt). Per questa onda possiamo scrivere
quindi l’intensità come I = A2 cos2 (u) che è tuttavia una funzione molto
variabile nel tempo e nello spazio. Per avere qualche informazione significativa è opportuno considerare il valore medio < I > su un numero elevato di
periodi:
A2
1
∝ A2 ⇒ |ψ|2
2
2
cioè l’intensità media è proporzionale al quadrato dell’ampiezza.
Siamo interessati a capire cosa accade se abbiamo una sovrapposizione
di onde, consideriamo in tal senso un pacchetto d’onde:
(2.3)
(2.4)
< I >= A2 < cos2 (u) >=
n
X
l=1
Al ejul = Aeju = ψ(r, t)
94
4. OTTICA
questa è una combinazione di soluzioni della medesima eq. di D’Alambert,
dunque è ancora una sua soluzione, quindi continua ad essere valida l’affermazione I ∝ |ψ|2 . Possiamo calcolare i coefficienti dell’onda risultante
come:
!1
2
X
(2.5)
A=
|Al |2
l
X
l
u = arctan X
(2.6)
Im ejul
Re ejul
l
possiamo quindi risolvere:
X
X
X
|Al |2 =
Il
(2.7)
I=
Al e−jul Al e−jul =
l
l
l
dobbiamo tuttavia aggiungere un fattore di interferenza alla precedente
quantità, con il quale otteniamo:
(2.8)
I=
X
l
Il +
X
Al Ah e
j(uh − ul )
| {z }
diff. di fase
h6=l
possiamo a questo punto calcolare l’intensità media delle onde < I >, se
l’onda l-ma e l’onda h-ma sono incoerenti il valor medio del termine di
interferenza sarà zero e risulterà:
X
(2.9)
< I >=
< Il >
l
se invece l’onda l-ma e l’onda h-ma sono coerenti il valor medio di quella
quantità ricadrà nell’intervallo [−1, 1]. Per essere più precisi in tal senso
dobbiamo imporre nuove ipotesi.
Torniamo al caso del dipolo oscillante che avevamo visto in 4. Avevamo
introdotto i concetti di campo vicino e campo di radiazione, per cui avevamo
introdotto la funzione di Bessel di ordine zero, cominciamo col costruire delle
soluzioni in forma di onda cilindrica, che possiamo ottenere semplicemente
troncando la J0 (u) come J0 (u) ' sin(u), in questo modo possiamo costruire
l’onda:
A
(2.10)
ψ(u) = √ ej(|k|ρ−ωt)
ρ
dove con la coordinata ρ misuriamo la distanza dall’asse di propagazione
dell’onda cilindrica su un fissato piano π ad esso ortogonale.
Nota 11. Quest’onda non soddisfa l’equazione di D’Alambert che, nonostante si chiami equazione delle onde, non genera tutte le onde. Per ottenere
l’equazione differenziale di cui quest’onda è soluzione si può procedere inserendo le equazioni di Maxwell in un mezzo non isotropo e con un insieme
specifico di fattori dissipativi.
Consideriamo ora di essere sul piano π e di avere una serie di N sorgenti disposte lungo un asse sul piano che indichiamo con x̂, poniamo ad una
2. INTERFERENZA E DIFFRAZIONE
95
distanza molto grande da questo uno schermo ad esso parallelo di questo consideriamo un punto P (si veda fig. 2) di coordinata x. Nell’approssimazione
Figura 2. Interferenza
che abbiamo fatto la distanza D è talmente elevata rispetto a quella tra le
sorgenti che possiamo considerare P come il punto all’infinito per una direzione, in questo modo abbiamo che gli unici raggi che raggiungono il punto
P sono quelli che partono sotto un angolo θ che possiamo calcolare come:
x
(2.11)
tan θ =
D
chiamiamo queste onde:
A
(2.12)
ψl = √ l ej(kρl −ωt)
ρl
per cui ρl = ρ0 + d sin θ + · · · + d sin θ = ρ0 + ld sin θ, ma ρ0 >> ld sin θ, a
questo punto possiamo scrivere, posto ρ̄ := ρ0 + N 2−1 d sin θ, che:
X
X A
A X j(kρl −ωt)
e
=
ψ=
ψl (u) =
√ l ej(kρl −ωt) = √
ρl
ρ̄
l
l
l
A −jωt X jk(ρ0 +ld sin θ)
A −jωt jkρ0 X jkld sin θ
=√ e
e
=√ e
e
e
=
ρ̄
ρ̄
l
l
"
#
A −jωt jkρ0 ejN kd sin θ − 1
e
=
=√ e
(2.13)
ρ̄
ejkd sin θ − 1
" jN kd sin θ
#
jN kd sin θ
−jN kd sin θ
2
A −jωt jkρ0 e 2
e 2
−e
e
=√ e
=γ= kd sin θ
jkd sin θ
jkd sin θ
−jkd sin θ
2
ρ̄
e 2
e 2 −e 2
ejN γ ejN γ − e−jN γ
A
= √ ejkρ0
ρ̄
jγ
ejγ − e−jγ
se osserviamo che ρ̄k = kρ + (N − 1)γ possiamo scrivere:
(2.14)
A
sin(N γ)
ψ = √ ej(ρ̄k−ωt)
ρ̄
sin γ
96
4. OTTICA
Dunque l’intensità luminosa complessiva risulta essere:
A j(ρ̄k−ωt) sin(N γ) 2
(2.15)
I(θ) = √ e
ρ̄
sin γ
passando al valor medio otteniamo:
(2.16)
< I(θ) >= I¯
sin2 (N γ)
sin2 (γ)
che è una funzione con N − 1 zeri ed N − 2 massimi.
Diffrazione Supponiamo di avere uno schermo su cui apriamo una fenditura. Emettiamo un’onda luminosa di direzione k da un lato dello schermo
e andiamo ad esaminare la zona illuminata al di là dello schermo. Differentemente da quello che ci si aspetta la zona illuminata è maggiore della
dimensione della fenditura, si veda fig. 3. Supponiamo ora di osservare il
Figura 3. Diffrazione da una fenditura
fenomeno al contrario, ovvero di porre un ostacolo tra la fonte luminosa e lo
schermo, in questo caso ci aspettiamo un ”fascio d’ombra” in corrispondenza dell’ostacolo, invece abbiamo anche in questo caso un’area illuminata più
grande. Tuttavia, la penombra, anche se sembra un effetto di diffrazione,
in realtà è un puro effetto geometrico dovuto ad una sorgente estesa. Come
possiamo spiegare il meccanismo che fa cambiare la propagazione della luce
da piana al profilo che ricaviamo sullo schermo?
Teorema 2.1 (Principio di Huygens-Fresnel). Ogni elemento dΣ di un
fronte d’onda Σ si può considerare formalmente come una sorgente secondaria di onde sferiche in fase con la primaria e di ampiezza proporzionale
a quella dell’onda primaria e all’area dΣ. La perturbazione prodotta in un
punto dello spazio si può sempre ottenere come sovrapposizione di tutte le
onde sferiche secondarie che raggiungono quel punto.
Questa formulazione ha, tuttavia, un problema, poiché utilizza onde
sferiche dovrebbe far si che si verifichino delle onde che procedono all”’indietro”, che, sperimentalmente, non esistono. Per compensare questa pecca
2. INTERFERENZA E DIFFRAZIONE
97
del principio sono state costruite delle teorie ad-hoc come il fattore di obliquità, che modula l’ampiezza dell’onda sferica in modo da cancellare gli effetti
all’indietro. Per il nostro fine di spiegare la diffrazione tuttavia questo principio è più che sufficiente: quando l’onda incontra un mezzo opaco alcune
sue parti vengono ”fermate”, mentre l’onda che passa al centro della fenditura resta piana, le parti che sono vicine ai suoi bordi diventano sorgenti di
onde secondarie sferiche in accordo al principio.
Potremmo ora concentrarci su due casi di diffrazione. La diffrazione
in prossimità della fenditura (diffrazione di Fresnel) e la diffrazione su uno
schermo a grande distanza (diffrazione di Fraunhofer), tuttavia scegliamo di
lavorare solo sulla seconda per sfruttare una serie di approssimazioni simili
a quelle usate nel caso dell’interferenza.
Costruiamo un’approssimazione in modo simile a come abbiamo fatto
per il caso precedente, consideriamo una fenditura di ampiezza ξ su uno
schermo di spessore d e poniamo a distanza D >> d uno schermo. Fissato
un punto P su quest’ultimo abbiamo che questo risulta essere un punto
all’infinito per una fissata direzione θ, cioè detta x la sua coordinata sullo
x
= tan θ (si veda fig. 4). Consideriamo l’elemento
schermo abbiamo che D
Figura 4. Diffrazione di Fraunhofer
di onda dξ per questo possiamo scrivere l’espressione dell’onda come:
(2.17)
adξ
ψ = √ ej(kρ−ωt)
ρ
sfruttando di nuovo la solita notazione imponiamo:
(2.18)
ρ = ρ0 + ξ sin θ ρ̄ = ρ0 +
d
kd sin θ
sin θ γ =
2
2
98
4. OTTICA
possiamo quindi scrivere l’onda risultante come:
Z d
Z
adξ j(k(ρ0 +ξ sin θ)−ωt)
a j(kρ0 −ωt) d jkξ sin θ
√ e
ψ=
e
dξ =
=√ e
ρ̄
ρ̄
0
0
d
a j(kρ0 −ωt) ejkξ sin θ a j(kρ0 −ωt) ejkd sin θ − 1
(2.19)
√
=√ e
=
e
=
ρ̄
jk sin θ 0
ρ̄
jk sin θ
ad
ej2γ − 1
ad ej(kρ0 −ωt) − 1
= √ ej(kρ0 −ωt) jkd sin θ = √
ρ̄
ρ̄
2jγ
2
2
se poniamo ora a =
(2.20)
A
d
possiamo scrivere l’ultima come:
A
A j(kρ0 −ωt) jγ ejγ − e−jγ
sin γ
= √ ej(kρ̄−ωt)
ψ =√ e
e
=
ρ̄
j2γ
ρ̄
γ
A sin γ j(kρ̄−ωt)
e
= A(ρ, θ)ej(kρ̄−ωt)
= √
ρ̄ γ
Tutte le onde si comportano come l’onda media e questo giustifica la presenza del termine ekρ̄ . La sua propagazione si comporta ancora come un’onda
piana, ma l’ampiezza si comporta come quella di un’onda sferica, A dipende
infatti sia da ρ che da θ.
Per quanto riguarda l’intensità dell’onda possiamo scrivere:
(2.21)
I = I0
sin2 γ
γ
per γ = 0 abbiamo l’unico massimo possibile, in cui l’intensità vale I0 ,
mentre abbiamo degli zeri per γ = nπ (vedi fig. 5). I valori di massimo
Figura 5. Intensità per la diffrazione di Fraunhofer
λ
locale li troviamo per sin θ∗ = 2π
kd = d , se λ > d non abbiamo soluzioni,
mentre se λ < d abbiamo soluzioni. Il θM AX = arcsin λd . Se la feritoia è cosı̀
stretta da avere λ > d abbiamo solo una zona illuminata, senza massimi
e minimi, ma il raggio luminoso che vediamo è più grande di quello che
abbiamo proiettato.
2. INTERFERENZA E DIFFRAZIONE
99
Proviamo ora ad indagare il viceversa, cioè quando un ostacolo giace
nello spazio. Possiamo fare l’integrale per ψ con estremi (−∞, d) e (d, +∞)
ed ottenere una soluzione. Possiamo altrimenti introdurre il seguente:
Teorema 2.2 (Principio di Babinet). La figura di diffrazione prodotta da un
corpo opaco è identica a quella prodotta da un’apertura ”complementare”
con la stessa forma e dimensione. Salvo per θ = 0.
Detta A una configurazione di fenditure e B la sua configurazione complementare abbiamo che ψT OT = ψA +ψB = 0 per θ 6= 0, ovvero ΨA = −ΨB ,
mentre IA = IB , in quanto l’intensità è proporzionale al quadrato. Per θ = 0
è più luminoso il caso ”inverso” rispetto a quello diretto, poiché nel primo
avviene il ricongiungimento delle onde che hanno superato l’ostacolo.