Capitolo 4
Fluidi ideali
4.1
Equazioni macroscopiche della dinamica dei
fluidi
Nel precedente Capitolo abbiamo derivato le equazioni idrodinamiche per un sistema di molecole neutre a bassa densità con collisioni binarie seppure con cammino libero medio piccolo rispetto alle scale del sistema. È possibile mostrare
che lo stesso sistema di equazioni può essere derivato trattando il fluido da un
punto di vista macroscopico come un sistema continuo. Di conseguenza potremo
concludere che le equazioni idrodinamiche viste nel precedente Capitolo possono
applicarsi anche a fluidi densi.
A livello macroscopico è possibile studiare la dinamica dei sistemi continui
utilizzando due diversi tipi di descrizione, il metodo euleriano e il metodo lagrangiano. Il metodo euleriano descrive l’andamento temporale delle grandezze
macroscopiche in un dato punto dello spazio, e utilizza derivate euleriane ∂/∂t,
indipendenti dalle derivate spaziali. Il metodo lagrangiano descrive invece l’andamento temporale delle grandezze seguendo le traiettorie degli elementi fluidi, per
cui le derivate lagrangiane d/dt tengono anche conto del moto del fluido. La
derivata lagrangiana di una quantità Q(x, t) risulta pertanto:
dQ
Q(x + uδt, t+δt) − Q(x, t)
= lim
δ→0
dt
δt
(4.1)
che sviluppando Q(x + uδt, t+δt) in serie di Taylor al prim’ordine:
Q(x + uδt, t+δt) = Q(x, t) + δt
∂Q
+ uδt · ∇Q
∂t
definisce il legame tra i due tipi di derivata:
dQ
∂Q
=
+ u · ∇Q
(4.2)
dt
∂t
espressione che peraltro abbiamo già incontrato per le derivate nello spazio delle
fasi a sei dimensioni.
31
32
CAPITOLO 4. FLUIDI IDEALI
4.1.1
Equazione di continuità
L’equazione di continuità è già stata ottenuta nel Capitolo 1 con considerazioni
macroscopiche di tipo euleriano nella forma (1.2):
∂ρ
+ ∇ · (ρu) = 0.
∂t
La corrispondente forma lagrangiana si ottiene dalla relazione vettoriale:
∂ρ
∂ρ
+ ∇ · (ρu) =
+ ρ∇ · u + u · ∇ρ = 0
∂t
∂t
e quindi
dρ
+ ρ∇ · u = 0 .
dt
4.1.2
(4.3)
Equazione del moto
Consideriamo un elemento di fluido di volume δV e massa ρ δV . La sua accelerazione è data dalla derivata lagrangiana della velocità du/dt, e quindi la legge
di Newton si scrive nella forma:
ρ δV
du
= δfvol +δfsup
dt
(4.4)
dove le forze agenti sull’elelemnto sono state divise in forze di volume e forze
di superficie. Le forze di volume sono quelle che agiscono su tutto il corpo
dell’elemento fluido (ad esempio la gravità) per cui si può porre:
δfvol = ρ δV f
(4.5)
dove f è la forza per unità di massa. Le forze di superficie agiscono invece
sulla superficie di contatto tra l’elemento considerato e il resto del fluido e può
quindi essere considerata proporzionale all’area; in generale tale forza avrà sia
componente normale alla superficie (pressione) sia tangenziale (sforzi trasversi).
Indicando con dfsup la forza elementare agente sulla superficie dS (normale uscente) e trattando forza e superficie ambedue come vettori, occorre introdurre
un tensore P come fattore di proporzionalità:
dfsup = −P · dS
(4.6)
ovvero
(dfsup )i =Pij dSj .
La forza totale agente sull’intera superficie è pertanto:
Z
fsup = − P · dS
(4.7)
che può essere trasformata con il teorema di Gauss in un integrale di volume
Z
fsup = − ∇·P dV .
(4.8)
4.1. EQUAZIONI MACROSCOPICHE DELLA DINAMICA DEI FLUIDI 33
Pertanto la forza elementare può essere riscritta come:
δfsup = −∇·P dV .
(4.9)
In tal modo l’equazione del moto dell’elemento fluido risulta:
ρ
du
= ρfvol − ∇·P
dt
(4.10)
che coincide con la (3.11).
L’esperimento mostra che affinché un fluido sia in equilibrio la forza di superficie deve essere perpendicolare ad una qualunque superficie in esso immersa. Anzi questa è spesso usata come la definizione di fluido in equilibrio: si
producono moti quando intervengano sforzi trasversi o shears (in un solido equilibri sono possibili anche in presenza di sforzi trasversi). Pertanto in un fluido
in equilibrio possiamo scrivere P =pn̂, dove n̂ è il tensore unitario normale alla
superficie, e quindi:
dfsup = −p dS
(4.11)
dove p è ovviamente la pressione, la forza per unità di superficie.
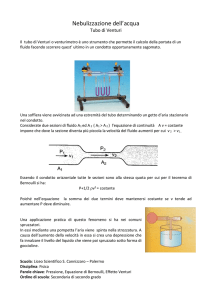
Tale espressione per la forza di superficie non si applica in generale al caso
di fluidi in movimento. Infatti strati fluidi in moto a differenti velocità possono
scambiare momento (Fig. 5), nel senso che gli strati che si muovono più rapidamente vengono frenati e perdono momento a favore di quelli più lenti. La forza
che produce questo effetto è la viscosità. In certe situazioni però l’effetto degli
sforzi trasversi non è importante neppure in presenza di moto, per cui possono
venire trascurati; tale approssimazione corrisponde al caso dei fluidi ideali, e
l’equazione del moto è l’equazione di Eulero (1755):
∂u
1
+ (u · ∇) u = f − ∇p
∂t
ρ
(4.12)
dove abbiamo lasciato cadere l’indicazione di forze di volume per la f .
4.1.3
Equazione dell’energia
Questa equazione segue dalla conservazione dell’energia che per un sistema fluido
in equilibrio termodinamico è rappresentata dal primo principio della termodinamica:
δQ = dU + pdV
(4.13)
dove δQ è la quantità di calore scambiata con l’ambiente, dU l’energia interna
e pdV il lavoro fatto dal sistema. Se all’interno del fluido sono però presenti
moti, le varie parti del sistema non saranno in equilibrio termodinamico, e la
condizione di equilibrio potrà essere applicata solo localmente, diciamo ad una
tipica massa δm. Pertanto, riferendo le quantità all’unità di massa
µ ¶
1
δQ = δm δq ,
dU = δm d ,
dV = δm d
,
(4.14)
ρ
34
CAPITOLO 4. FLUIDI IDEALI
Fig. 4.1: Profilo di velocità in uno strato limite tra fluidi in moto relativo
si ottiene
dq
d
d
=
+p
dt
dt
dt
µ ¶
1
.
ρ
Utilizzando l’equazione di continuità,
µ ¶
p dρ
p
d 1
=− 2
= ∇·u
p
dt ρ
ρ dt
ρ
(4.15)
(4.16)
avremo
d
+ p ∇ · u = −L
(4.17)
dt
dove L = ρ (dq/dt) è il tasso di perdita di calore del sistema per unità di volume.
Questo tasso in un fluido è tipicamente legato al flusso di calore per conducibilità
termica nella direzione di temperatura decrescente:
ρ
F = −K ∇T
(4.18)
dove K è il coefficiente di conducilbilità termica. La perdita di calore da un
elemento fluido sarà pertanto data dal flusso attraverso la sua superficie:
Z
Z
F · dS =
∇·F dV
(4.19)
S
V
e quindi la perdita di energia per unità di volume risulta:
L = ∇·F = −∇· (K ∇T ) .
(4.20)
Con questa espressione si riottiene quindi l’equazione dell’energia (3.45) ricavata nel precedente Capitolo per i fluidi a bassa densità nel limite di viscosità
trascurabile:
d
ρ = −p ∇ · u + ∇· (K ∇T ) .
(4.21)
dt
4.2. EQUAZIONE DELLA VORTICITÀ
35
Naturalmente in casi astrofisici di interesse gli effetti di viscosità possono
essere importanti, come così pure le perdite radiative e il riscaldamento per
assorbimento radiativo. La fisica della viscosità verrà introdotta nel prossimo
Capitolo. La fisica delle perdite e assorbimenti radiativi non verrà discussa in
questo Corso.
4.2
Equazione della vorticità
Per mezzo dell’identità vettoriale
(u · ∇) u =
1
∇ (u · u) − u × (∇ × u)
2
(4.22)
l’equazione di Eulero (4.12) può riscriversi nella forma
1
∂u 1
+ ∇ (u · u) − u × (∇ × u) = − ∇p + f ;
∂t
2
ρ
(4.23)
prendendone il rotore, e nell’ipotesi che f sia conservativa, si ottiene:
∂ω
1
= ∇× (u × ω) + 2 ∇ρ × ∇p
∂t
ρ
(4.24)
ω =∇×u
(4.25)
dove
è la definizione di un vettore detto vorticità. Questo vettore è una misura della
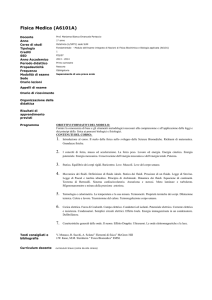
velocità angolare media del fluido intorno agli assi coordinati. Per illustrare
bervemente questo punto si consideri la situazione di Fig. 4.2, in cui i segmenti
perpendicolari OP e OQ di lunghezza d si muovono con il fluido. La velocità di
P relativa ad O è:
∂u
uP − uO ≈
d
(4.26)
∂x1
e la sua componente nella direzione x2 contiene l’effetto di rotazione antioraria
a velocità angolare ∂u2 /∂x1 nel piano del diagramma. Con lo stesso calcolo si
ottiene che la velocità angolare antioraria di Q è −∂u1 /∂x2 . La media tra le
due velocità angolari sarà pertanto:
1
2
µ
∂u2 ∂u1
−
∂x1 ∂x2
¶
(4.27)
che è proprio la componente del vettore ∇ × u intorno all’asse x3 perpendicolare
al piano del disegno.Ovviamente questa considerazione può essere estesa alle
altre coordinate in modo da ottenere l’intero vettore ∇ × u.
36
CAPITOLO 4. FLUIDI IDEALI
Fig. 4.2: Velocità angolari di linee solidali con un fluido in moto e definizione di
vorticità
4.3
Equazioni macroscopiche in forma di leggi
di conservazione
L’equazione di continuità (3.23) indica che la variazione di densità in un fluido
è possibile solo attraverso un flusso di materia in entrata o uscita dalla regione
considerata:
∂
(densità) + divergenza (flusso di densità) = 0 .
(4.28)
∂t
In questa forma l’equazione indica una legge di conservazione della materia.
Anche le altre equazioni fluide possono essere scritte sotto forma di leggi
di conservazione con opportune definizioni delle quantità che si conservano.
L’equazione del moto, con alcune trasformazioni vettoriali e utilizzando l’equazione
di continuità, diventa la legge di conservazione del momento:
∂
(ρu) + ∇·T = 0
∂t
con il flusso di momento dato da:
(4.29)
Tij = p δ ij + ρui uj
in quanto
∂
∂t
Z
ρu dV = −
Z
∇·T dV = −
(4.30)
Z
S
T dS .
Infine, utilizzando l’espressione per l’energia per unità di volume ρ + ρu2 /2,
somma dell’energia interna e cinetica, si può scrivere l’equazione dell’energia
nella forma
¶
¸
¶
∙ µ
µ
∂
1 2
1
(4.31)
ρ + ρu2 + ∇ · ρu
u + w − K ∇T = 0
∂t
2
2
4.4. FLUIDI INCOMPRESSIBILI E BAROTROPICI
37
dove T è la temperatura e w l’entalpia per unità di massa
w= +
p
.
ρ
(4.32)
Nelle leggi di conservazione per momento ed energia ora scritte sono state tralasciate le forze esterne e i termini di viscosità, che naturalmente vanno introdotti
laddove importanti.
4.4
Fluidi incompressibili e barotropici
Un’approssimazione in cui le equazioni ora discusse risultano semplificate è
quella dell’incompressibilità, ipotesi naturale nel caso di liquidi, come l’acqua.
Tuttavia anche in molte situazioni in cui si abbia a che fare con gas, cioè sistemi fisicamente compressibili, l’ipotesi di incompressibilità può ancora essere
accettabile se i fenomeni che si intende studiare (equilibrio, dinamica, instabilità, ecc.) si sviluppano su tempi scala lunghi rispetto alla capacità del mezzo
di trasportare l’informazione. Se ad esempio si considera un aereo che si muove
nell’aria a velocità minore della velocità del suono, l’aria avrà tempo a diffondere la compressione che l’aereo costruisce di fronte a sé, per cui il fluido si
comporterà praticamente come se fosse incompressibile; diversamente, se l’aereo
è supersonico, la compressione di fronte all’aereo non avrà tempo a dissiparsi e
il regime sarà compressibile.
Il limite di incompressibilità comporta dρ/dt ≡ 0 e quindi dalla (4.3):
∇·u=0.
(4.33)
Conseguentemente, quando nella dinamica di un fluido la divergenza della velocità sia trascurabile, si può parlare, in modo del tutto generale, di fluidi incompressibili. La (4.24) per fluidi incompressibili assume la forma semplice:
∂ω
= ∇× (u × ω)
∂t
(4.34)
che dipende solo da ω e u che sono peraltro quantità tra loro legate dalla (4.25).
Se u è dato, si ottiene immediatamente ω; se ω è dato, u è derivabile dalle (4.25)
e (4.33), proprietà questa di ogni vettore di cui siano dati rotore e divergenza.
Pertanto la teoria dinamica dei fluidi incompressibili è consistentemente risolubile in forma completa con l’equazione di vorticità (4.34) e le (4.33) e (4.25).
In tal senso l’equazione dell’energia risulta ridondante e viene infatti tralasciata nelle corrispondenti trattazioni; ciò significa che la scelta della condizione
(4.33) ha sostituito l’equazione dell’energia assicurando un trasporto dell’energia
interna su tempi brevi rispetto alla dinamica del problema.
In una serie di problemi idrodinamici è invece lecito assumere una relazione
tra densità e pressione del tipo
p = p (ρ)
(4.35)
38
CAPITOLO 4. FLUIDI IDEALI
chiamata relazione barotropica, cui corrispondono i fluidi barotropici. Anche in
tal caso, essendo i gradienti di densità e pressione paralleli, l’equazione di vorticità (4.24) si riduce alla forma (4.34), per cui ancora la dinamica del sistema è
completamente risolta combinando l’equazione di continuità e l’equazione di Eulero, tralasciando l’equazione dell’energia che è appunto sostituita dalla (4.35).
4.5
Idrostatica, equilibrio della corona solare
La più semplice applicazione delle equazioni idrodinamiche ideali è il caso idrostatico, u = 0 e d/dt ≡ 0; in tal caso le equazioni sono:
∇p = ρf
(4.36)
∇· (K ∇T ) = 0
(4.37)
p = p0 − ρgz
(4.38)
kB T dρ
= −ρg
m dz
(4.40)
mentre l’equazione di continuità è un’identità.
Consideriamo anzitutto il semplice caso del calcolo del profilo di pressione
nell’atmosfera vicina alla superficie di una stella, considerando quindi la forza
esterna gravitazionale costante, f = −ρgẑ, dove ẑ è il versore normale alla
superficie della stella.
Nel caso di un fluido incompressibile, l’equazione dell’energia è ridondante e
la soluzione dell’equazione del moto, risulta:
ove p0 è la pressione alla superficie della stella.
Nel caso di fluido compressibile interviene invece l’equazione dell’energia.
Per semplicità discutiamo il caso di un gas ideale isotermo; dalle relazioni (3.3)
e (3.19) per il gas ideale
kB
p=
ρT
(4.39)
m
si ottiene per T = costante (atmosfera isoterma):
la cui soluzione è
µ
¶
mgz
ρ = ρ0 exp −
;
(4.41)
kB T
questa è la formula ipsometrica applicabile a certe porzioni dell’atmosfera terrestre.
Le equazioni idrostatiche ideali, nel caso di simmetria sferica, sono usate per
la costruzione dei modelli stellari. In generale tuttavia nelle stelle, a parte le
stelle compatte, il trasporto di energia non è dovuto alla conduzione termica
bensì a processi convettivi o radiativi. In particolare, sostituendo alla (4.39)
l’espressione politropica p = Aρ1+1/n , si ottiene
¶
µ
1 d r2 d h 1+1/n i
= −4πGρ
(4.42)
Aρ
r2 dr ρ dr
4.6. IDRODINAMICA: EQUAZIONE DI BERNOULLI
39
che conduce alla ben nota equazione di Lane-Emden delle stelle politropiche
discussa nei testi di struttura ed evoluzione stellare.
Per illustrare l’uso completo delle equazioni idrodinamiche ideali, studiamo
il modello classico della corona solare. Il problema principale della corona è il
suo riscaldamento alla temperatura di milioni di gradi, di gran lunga al di sopra
della temperatura di fotosfera e cromosfera. Senza entrare qui nel dettaglio
del meccanismo di riscaldamento, assumiamo semplicemente che la base della
corona sia mantenuta ad una temperatura T = T0 al raggio r = r0 . Poichè la
massa della corona, un gas peraltro molto rarefatto, risulta trascurabile rispetto
alla massa del Sole, si può porre:
dp
GM¯ m p
=− 2
dr
r kB T
µ
¶
d
2 dT
Kr
=0
dr
dr
(4.43)
(4.44)
dove si è assunta l’equazione di stato del gas perfetto (4.39). Come vedremo
in seguito, la conducibilità termica in un gas perfetto è K ∝ T 5/2 , per cui la
seconda equazione fornisce:
r2 T 5/2
dT
= costante
dr
e quindi
³ r ´2/7
0
.
r
Utilizzando questo risultato nell’equazione del moto
T = T0
(4.45)
dp
GM¯ m dr
=−
2/7 r 12/7
p
kB T0 r
0
si ricava quindi
p = p0 exp
½
∙
¸¾
7GM¯ m ³ r0 ´5/7
−1
.
5kB T0 r0
r
(4.46)
Il risultato sorprendente di questa soluzione è che la pressione della corona non si
annulla per r → ∞. Sulla base di questo dato di significato generale Parker nel
1958 propose che in effetti la corona non potesse essere in equilibrio, ma dovesse
essere dotata di un moto di espansione. Vedremo il modello idrodinamico del
vento solare nel seguito del corso.
4.6
Idrodinamica: equazione di Bernoulli
Passiamo ora ad un semplice esempio di idrodinamica, e precisamente la dinamica dei fluidi in condizioni stazionarie, cioè indipendenti dal tempo ∂/∂t ≡ 0.
Per un fluido in queste condizioni è utile definire il concetto di linea di corrente
40
CAPITOLO 4. FLUIDI IDEALI
(o streamline), cioè una linea tale che in ogni suo punto la velocità del fluido u
sia ad essa tangente (il concetto è analogo a quello di linea di forza in un campo
di forze). La linea di corrente risulta pertanto essere la traiettoria descritta da
un elemento fluido nel tempo.
Supponendo che le forze esterne agenti sul fluido siano conservative (ad esempio la gravità) si pone
f = −∇φ
(4.47)
e l’equazione di Eulero fornisce
µ
¶
1 2
1
∇
u − u × (∇ × u) = − ∇p − ∇φ .
2
ρ
(4.48)
Si prenda ora un integrale di linea lungo una linea di corrente ove sia dl l’elemento
di linea:
¶
∙ µ
¸
Z
1
1 2
dl· ∇
u − u × (∇ × u) + ∇p + ∇φ = 0 .
(4.49)
2
ρ
Poiché dl è parallelo per definizione a u, dl · u × (∇ × u) ≡ 0, e quindi lungo
una linea di corrente dovrà essere:
Z
dp
1 2
u +
+ φ = costante
(4.50)
2
ρ
che rappresenta il ben noto teorema di Bernoulli (1783). In particolare per
il caso di un fluido incompressibile e con φ dato per la gravità alla superficie
terrestre si ha la forma ricavata euristicamente nei corsi di fisica elementare:
1 2 p
u + + gh = costante .
2
ρ
4.7
(4.51)
Teorema della vorticità di Kelvin
Abbiamo ricavato che fluidi incompressibili o barotropici soddisfano una semplice equazione per la vorticità (4.34). Da questa discende il teorema di conservazione della vorticità ricavato da Kelvin nel 1869. Esso stabilisce che il
flusso della vorticità attraverso una superficie qualunque in un fluido si conserva quando si segua l’evoluzione dinamica degli elementi della superficie. In
realtà questo teorema vale per qualunque quantità fisica vettoriale Q che soddisfi
un’equazione del tipo:
∂Q
= ∇ × (u × Q)
(4.52)
∂t
indipendentemente dalla sua particolare relazione con u che si ha nel caso della
vorticità. Dimostreremo che:
Z
d
Q · dS = 0 .
(4.53)
dt S
4.7. TEOREMA DELLA VORTICITÀ DI KELVIN
41
La variazione del flusso concatenato con una superficie S è dovuta a due
effetti: (1) variazione intrinseca di Q, e (2) moto della superficie S:
Z
Z
Z
d
d
∂Q
Q · dS =
· dS+ Q ·
(dS) .
(4.54)
dt S
dt
S ∂t
S
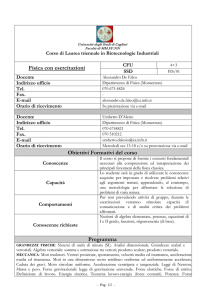
Con riferimento alla Fig. 4.3, un elemento di area dS al tempo t si trasforma
Fig. 4.3: Moto di un elemento fluido di superficie S
in dS 0 al tempo t0 = t + δt. Le due superfici formano le sezioni di un cilindro di
altezza u δt; l’elemento di area laterale del cilindro sarà dA = −u δt × dl, dove
dl è l’elemento di linea del perimetro dell’areaI dS. Poichè l’area vettoriale di
una superficie chiusa è necessariamente nulla,
0
dS − dS−δt
Z
dS+dS 0 +dA
e quindi
d
dS0 − dS
(dS) = lim
=
δt→0
dt
δt
Z
dS = 0 , avremo
u × dl = 0
dS+dS 0 +dA
u × dl
per cui
Z Z
Z Z
Z
d
Q · (dS) =
Q · (u × dl) =
(Q × u) · dl . (4.55)
dt
S
S dS+dS 0 +A
S dS+dS 0 +A
42
CAPITOLO 4. FLUIDI IDEALI
L’integrale di linea a secondo membro, quando venga fatta l’ulteriore integrazione degli elementi dS, corrisponde all’integrazione sulla linea C che circonda l’intera superficie S; utilizzando il teorema di Stokes si ottiene:
Z
Z
I
d
Q·
(Q × u) · dl = [∇ × (Q × u)] · dS
(dS) =
dt
S
C
S
e infine, tenendo conto della (4.52),
¸
Z ∙
Z
∂Q
d
Q · dS =
− ∇ × (u × Q) · dS = 0 .
dt S
∂t
S
(4.56)
Quando per Q si intenda la vorticità ω, il risultato prende il nome di teorema
di Kelvin, che esprime il fatto che il flusso della vorticità concatenato con una
superficie che si muove con il fluido si conserva, ossia i vortici si muovono con
il fluido. Questo risultato è osservabile sperimentalmente ad esempio nel caso
di un fiume: i vortici vengono trascinati dalla corrente, pur essendo in parte
deformati se le linee di corrente non sono uniformi. Peraltro va anche notato
che se in un fluido ideale in moto non sono presenti inizialmente vortici, questi
non possono generarsi nel tempo; tale risultato è anche ricavabile direttamente
dalla (4.34). Per lo sviluppo di vorticità è necessaria la viscosità, come vedremo
nel prossimo Capitolo, oppure la presenza di gradienti di densità e pressione non
paralleli, come mostrato dalla (4.24). Utilizzando il teorema della circolazione
di Stokes con ω= ∇ × u si può scrivere il teorema di Kelvin come conservazione
della circuitazione del vettore velocità:
Z
I
dΓ
d
d
(∇ × u) · dS =
u · dl = 0
(4.57)
=
dt
dt S
dt C
che useremo appunto nel prossimo Capitolo.
4.8
Flussi irrotazionali
Poichè nei fluidi ideali incompressibili non si genera vorticità, è di un certo
interesse studiare flussi a vorticità nulla, i quali quindi soddisfino alla condizione
di irrotazionalità del campo di velocità:
∇×u=0.
(4.58)
Tali flussi sono appunto detti irrotazionali o anche flussi potenziali in quanto il
campo di velocità può essere espresso come gradiente di un potenziale:
u = −∇ϕ .
(4.59)
Utilizzando l’equazione di incompressibilità, il potenziale soddisfa l’equazione
di Laplace:
∇2 ϕ = 0
(4.60)
4.8. FLUSSI IRROTAZIONALI
43
con la condizione al contorno che impone che la componente normale della
velocità sul contorno sia nulla (condizione di Neumann):
∂ϕ
=0.
∂n
(4.61)
La soluzione di questo problema è unica e una gran quantità di soluzioni per
casi di interesse sperimentale sono presentate nei classici libri di idrodinamica.
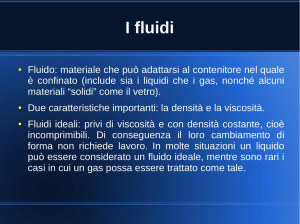
Esamineremo qui l’esempio dello studio del flusso uniforme intorno ad un cilindro infinito a sezione circolare e asse perpendicolare alla direzione del flusso
(Fig. 4.4).
Assumiamo che il flusso sia uniforme a grande distanza dal cilindro, con
velocità u = −Uêx e sia a il raggio del cilindro. Calcoliamo il profilo di velocità
intorno al cilindro, tenendo conto che il problema è di fatto bidimensionale. Le
condizioni al contorno del cilindro sono:
∂ϕ
=0
∂r
a r=a.
(4.62)
Il potenziale della velocità all’infinito è
ϕ = U r cos θ
a r→∞
(4.63)
che corrisponde appunto ad una velocità
u∞ = −U cos θêr + U sin θêθ = −Uêx .
(4.64)
La soluzione generale dell’equazione di Laplace in coordinate cilindriche può
essere scritta come serie di Fourier:
¶
∞ µ
X
Bn
ϕ = (A0 + B0 ln r) (C0 + D0 θ) +
An rn + n (Cn cos nθ + Dn sin nθ)
r
n=1
(4.65)
(si veda ad esempio Panofsky & Phillips 1962, pg. 73). Le condizioni al contorno
(4.62) e (4.63) sono soddisfatte solo per
µ
¶
a2
ϕ = U cos θ r +
r
(4.66)
e pertanto la soluzione del flusso è data da
u = −Uêx + U
a2
(cos θêr + sin θêθ )
r2
(4.67)
le cui linee di corrente sono riportate in figura.
Studiamo ora il fenomeno del moto di un cilindro in un fluido ideale a velocità
Uêx . Naturalmente questo fenomeno si riporta al sistema in cui il cilindro è a
riposo con una trasformazione galileiana con velocità Uêx . Prendendo l’origine
44
CAPITOLO 4. FLUIDI IDEALI
Fig. 4.4: Flusso di un fluido ideale intorno ad un cilindro
delle coordinate nella posizione istantanea del centro del cilindro il profilo di
velocità del fluido intorno ad esso potrà essere scritto:
u0 = u + Uêx = U
a2
(cos θêr + sin θêθ )
r2
(4.68)
e pertanto l’energia cinetica associata con il moto del fluido intorno al cilindro
di lunghezza unitaria risulterà:
Z ∞
1
1
1
2
(u0 ) 2πr dr = πρa2 U 2 = M 0 U 2
(4.69)
Kf l = ρ
2 a
2
2
dove M 0 è la massa del fluido spostata dal cilindro per unità di lunghezza.
Aggiungendo l’energia cinetica del cilindro, sempre per unità di lunghezza, si
ottiene l’energia cinetica totale connessa con il fenomeno:
Ktot =
1
(M + M 0 ) U 2 .
2
(4.70)
Da questa espressione per Ktot si può ricavare l’equazione del moto del cilindro; infatti la variazione di energia cinetica rispetto al tempo sarà pari al lavoro
della forza agente:
F·U=
dKtot
dU
= (M + M 0 ) U ·
dt
dt
ossia
F = (M + M 0 )
dU
dt
(4.71)
4.9. FUNZIONE DI CORRENTE
45
cioè la forza impartisce l’accelerazione richiesta non solo alla massa del cilindro,
ma a quella per muovere il fluido intorno all’ostacolo. Da questo risultato nasce
il cosiddetto paradosso di D’Alembert: la forza è nulla per un cilindro che si
muova a velocità costante. Ciò è contrario all’esperienza che ci mostra come
un oggetto in moto in un fluido subisca un frenamento; in realtà il risultato
presente è legato al fatto che siamo nel limite di fluidi ideali senza viscosità. È
invece proprio la viscosità che sottrae energia al sistema dissipandola in calore
e quindi esercita un frenamento; il risultato ora discusso mostra che il limite di
fluido ideale può portare a risultati non corretti.
Analizziamo infine il caso di un cilindro che cade sotto l’azione della gravità
in un fluido ideale di dimensioni molto grandi da poter trascurare effetti al
contorno. Il principio di Archimede definisce la forze di gravità:
F = (M − M 0 ) g
per cui
dU
M − M0
g
(4.72)
=
dt
M + M0
e quindi il cilindro continuerà ad accelerare sempre. Anche questo risultato è
contrario agli esperimenti che mostrano invece come un corpo in caduta in un
mezzo raggiunga una velocità terminale massima: di nuovo il risultato non è
corretto per aver trascurato la viscosità del mezzo.
4.9
Funzione di corrente
Nel caso di fluidi incompressibili ∇ · u = 0, la velocità può essere espressa,
in base alle proprietà degli operatori vettoriali, come il rotore di un campo
vettoriale; riferendosi per semplicità ad un caso bidimensionale:
u = −∇× [ψ(x, y)êz ]
(4.73)
o, con le componenti scalari:
ux = −
∂ψ
,
∂y
uy =
∂ψ
.
∂x
(4.74)
La ψ è detta funzione di corrente ed ha la proprietà di essere costante lungo le
linee di corrente. Queste ultime sono definite da:
dy
dx
=
ux
uy
ossia l’equazione della linea di corrente è:
uy dx − ux dy = 0 .
Dalla (4.74) si ricava pertanto:
∂ψ
∂ψ
dx +
dy = 0 ,
∂x
∂y
(4.75)
46
CAPITOLO 4. FLUIDI IDEALI
che definisce appunto la costanza di ψ lungo le linee di corrente.
Se il flusso è anche irrotazionale, cioè privo di vorticità, possiamo utilizzare
anche il potenziale della velocità:
ux = −
∂ϕ
,
∂x
uy = −
∂ϕ
.
∂y
(4.76)
Si ricava immediatamente che
∇ϕ · ∇ψ = 0
per cui le due funzioni sono ortogonali, consistentemente con il loro significato.