1
ESERCIZI SULLA DINAMICA DI CORPI
RIGIDI.
Risoluzione mediante equazioni di Lagrange, equilibrio relativo (forze
apparenti), stazionarietà del potenziale U; stabilità dell’equilibrio e analisi
delle piccole oscillazioni.
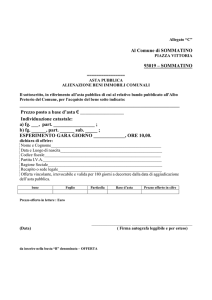
Esercizio n.17 - terza risoluzione alternativa
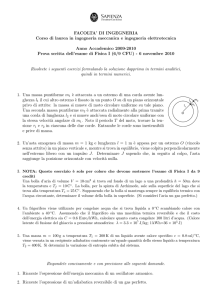
Il sistema è rappresentato dalla massa puntiforme mq , dal disco di massa M e raggio
R che rotola senza strisciare sul piano inclinato di un angolo α sull’orizzontale e
dal filo che scorre parallelamente al piano inclinato e su un perno liscio (B).
B
A
q
G
M, R
α
C
Determinare il moto del sistema mediante le equazioni di Lagrange.
− − − − − − − − − − − − − − −−
Il sistema è caratterizzato da un grado di libertà: come coordinata libera si sceglie
la posizione x del peso q.
s
ϑ
A
t
x
p
n
k
α
C
q
2
Come visto in precedenza, la rotazione ϑ del disco e la posizione s del baricentro
G lungo il piano inclinato dipendono linearmente da x:
ẋ
x
⇒ ϑ = ϑ0 −
2R
2R
x
ẋ
ṡ = R ϑ̇ = −
⇒ s = s0 −
2
2
ϑ̇ = −
Essendo inoltre il sistema conservativo, è possibile definire il potenziale U delle
forze applicate:
µ
¶
1
Û = q x + (p sin α) s = q − p sin α x + p sin α s0
2
e, eliminando i termini costanti (inessenziali per la definizione di U), si può assumere:
µ
¶
1
U = q − p sin α x
2
L’energia cinetica T del sistema è data dalla seguente espressione:
" µ
¸
¶ µ
∙
¶2 #
q
1
ẋ
1
1
1
3
2
=
−
T = mq ẋ2 + IC ϑ̇ =
ẋ2 +
MR2
2
2
2g
2 2
2R
¶
µ
1 1
1q 13
+
M ẋ2 =
(8q + 3p) ẋ2
=
2g 28
2 8g
La lagrangiana del sistema è dunque data dall’espressione seguente
¶
µ
1
1 1
2
(8q + 3p) ẋ + q − p sin α x
L=T +U =
2 8g
2
e l’equazione del moto:
µ ¶
µ
¶
d ∂L
∂L
1
1
−
=0 ⇒
(8q + 3p) ẍ − q − p sin α = 0
dt ∂ ẋ
∂x
8g
2
Con alcuni passaggi algebrici si ricava:
ẍ = g
8q − 4 p sin α
8q + 3p
equazione che coincide con quelle ricavate in precedenza con i vari metodi e che,
risolta e assegnate le condizioni iniziali, fornisce la legge oraria del moto del peso
q. La legge oraria del disco si ricava dalla relazione:
ϑ̇ = −
ẍ
g 8q − 4 p sin α
ẋ
⇒ ϑ̈ = −
=−
2R
2R
2R 8q + 3p
che deve essere risolta mediante integrazione e assegnazione delle condizioni iniziali
su ϑ.
3
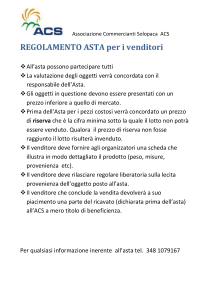
Esercizio n.23
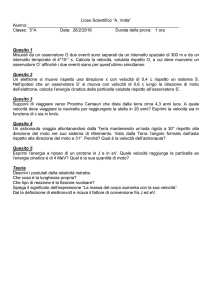
Un’asta pesante di massa M e lunghezza L è vincolata ad un punto fisso mediante
una cerniera sferica liscia che le permette di ruotare liberamente nello spazio.
M, L
Supponendo che l’asta sia modellata come elemento rigido mono-dimensionale,
ricavare le equazioni del moto del sistema.
− − − − − − − − − − − − − − −−
Il vincolo in O permette all’asta due rotazioni. Come coordinate libere si scelgono
le rotazioni ϑ e ϕ rappresentate nella figura seguente.
x, i
O z, k
ϕ
x, i
O
y, j
G
M, L
p
A
y, j
G
ϑ
M, L
A
z, k
4
Essendo il vincolo liscio e la forza peso conservativa, il moto può essere determinato
mediante le equazioni di Lagrange.
x, i
O
y, j
s
ϑ
Q
A
p/L
z, k
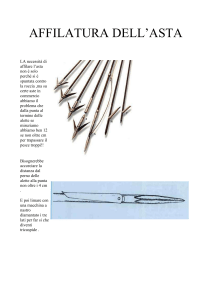
Sia s l’ascissa che misura la distanza del generico punto Q dell’asta dall’origine O
(0 ≤ s ≤ L). Il potenziale
¡ ¢ U è il lavoro compiuto dal carico distribuito per unità
di lunghezza dell’asta Lp e dipende esclusivamente dalla coordinata ϑ:
U=
Z
0
L
³p´
L
zQ ds =
Z
0
L³
p´
p
L2
L
(s cos ϑ) ds = cos ϑ
= p cos ϑ
L
L
2
2
Si noti che lo stesso risultato può essere ottenuto immediatamente mediante il
risultante del carico distribuito, ovvero il peso p (applicato nel baricentro G):
U = p zG = p
L
cos ϑ
2
Analogamente, l’energia cinetica può essere determinata mediante definizione; indicata con γ la densità di massa dell’asta (per unità di lunghezza, γ = M/L) si
ottiene:
Z L
1 2
γ vQ ds
T =
0 2
³−−−−→´
La velocità del generico punto Q può essere ricavata a partire dal vettore Q − O
³−−−−→´
Q − O = xQ i + yQ j + zQ k = (s sin ϑ cos ϕ) i + (s sin ϑ sin ϕ) j + (s cos ϑ) k
³−−−−→´
³
´
d Q−O
= sϑ̇ cos ϑ cos ϕ − sϕ̇ sin ϑ sin ϕ i+
vQ =
dt
³
´
³
´
+ sϑ̇ cos ϑ sin ϕ + sϕ̇ sin ϑ cos ϕ j + −sϑ̇ sin ϑ k
da cui, dopo alcune semplificazioni:
2
vQ
= vQ × vQ =
5
e l’energia cinetica:
³ 2
´Z L
´
1
1 ³ 2
2
2
s2 ds = ML2 ϑ̇ + ϕ̇2 sin2 ϑ
T = γ ϑ̇ + ϕ̇ sin ϑ
2
6
0
Le equazioni del moto si ottengono dalla definizione della lagrangiana:
½
d ∂L
dt ∂ ϕ̇
d ∂L
dt ∂ ϑ̇
−
−
∂L
∂ϕ
∂L
∂ϑ
³ 2
´
1
L
2
2
2
L = T + U = ML ϑ̇ + ϕ̇ sin ϑ + p cos ϑ
6
2
¢
¡
½
d 1
=0
ML2 ϕ̇ sin2 ϑ = 0
dt
3
¡
¢
⇒
1
1
L
2
2 2
=0
ϑ̈
−
ML
ML
ϕ̇
2
sin
ϑ
cos
ϑ
−
p
sin
ϑ
=0
3
6
2
da cui si ricava il sistema di equazioni differenziali del moto, la cui integrazione deve
essere generalmente effettuata per via numerica dopo aver assegnato le condizioni
iniziali [ϑ (0) = ϑ0 , ϑ̇ (0) = ϑ̇0 , ϕ (0) = ϕ0 , ϕ̇ (0) = ϕ̇0 ]:
½
1
ϕ̇ sin2 ϑ = 3A1 ML
2
(1)
ϑ̈ = ϕ̇2 sin ϑ cos ϑ − 32 Lg sin ϑ
Tra i vari moti possibili (che si differenziano per le differenti condizioni iniziali) ve
ne sono alcuni particolari per cui:
½
ϕ̇ (t) = Ω = cost.
(2)
ϑ (t) = ϑ̄ = cost.
ovvero l’asta ruota con velocità angolare Ω costante attorno all’asse verticale y
mentre l’angolo di apertura ϑ rimane costante. Per un osservatore solidale col
piano che contiene l’asta e l’asse z l’asta appare fissa, ovvero in "equilibrio relativo".
Questa considerazione verrà successivamente utilizzata per utilizzare altri approcci
risolutivi.
Sostituendo le (2) nel sistema (1) si ottengono i valori ϑ̄ per assegnata velocità
angolare Ω:
½
2
A1 =¡ML
Ω sin2 ϑ̄ ¢
3
2
sin ϑ Ω cos ϑ − 32 Lg = 0
⇒
ϑ̄1 = 0
ϑ̄2 = π
cos ϑ̄3 = 32 Lg Ω12
dove la terza soluzione è valida solo per Ω2 sufficientemente elevato:
3g 1
≤1
2 L Ω2
⇒
Ω2 ≥
3g
2L
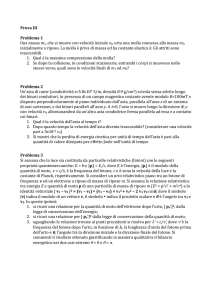
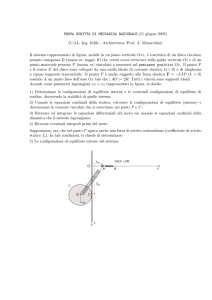
Metodo alternativo per la ricerca delle configurazioni di "equilibrio relativo"
Le soluzioni particolari (2) determinate in precedenza definiscono, per un osservatore solidale col piano che contiene l’asta e l’asse z, l’asta come in "equilibrio
relativo". Tale osservatore non è però inerziale: queste configurazioni particolari
possono essere determinate con l’equilibrio solo se si introducono le forze d’inerzia
6
che, essendo l’osservatore
p solidale con l’asta, si riducono alle sole forze centrifughe
2
(fΩ = γΩ r, con r = x2 + y 2 = s sin ϑ).
x, i
O
y, j
ϑ s
p Q
Ω
A γ Ω2 r
z, k
Il risultante delle forze centrifughe è:
FΩ =
Z
L
2
fΩ ds = γ Ω sin ϑ
0
Z
L
s ds = M Ω2
0
L
sin ϑ = M Ω2 rG
2
e va applicato alla quota zGΩ :
MO =
Z
L
2
fΩ z ds = γ Ω sin ϑ cos ϑ
0
zGΩ =
Z
L
2
s ds = FΩ
0
2L
cos ϑ
3
ovvero nel baricentro del triangolo delle forze fΩ .
x, i
O
y, j
ϑ G
Ω
z, k
p
GΩ
A
M Ω2 rG
µ
¶
2L
cos ϑ
3
7
L’equilibrio (relativo) dell’asta si ottiene imponendo l’annullarsi del momento risultante rispetto al polo O:
µ
¶
L
2
2L
ª MO = −p sin ϑ + M Ω sin ϑ
L cos ϑ = 0
2
2
3
µ
¶
ϑ̄1 = 0
ML
2
2
ϑ̄2 = π
=
sin ϑ
L Ω cos ϑ − g = 0 ⇒
2
3
cos ϑ̄3 = 32 Lg Ω12
cioè le stesse configurazioni ricavate in precedenza.
Secondo metodo alternativo per la ricerca delle configurazioni di "equilibrio relativo"
Le configurazioni di equilibrio possono essere determinate anche mediante la stazionarietà del potenziale U. Infatti, quest’ultimo è definibile poiché le forze centrifughe
ammettono un potenziale: considerando una singola massa puntiforme m in moto
rotatorio uniforme con velocità angolare Ω attorno all’asse z, il lavoro LΩ compiuto
da una forza F = m Ω2 r per uno spostamento radiale r̄ è dato da:
Z r̄
Z r̄
1
1
2
LΩ =
F dr = m Ω
r dr = m Ω2 r̄2 = Iz Ω2 = UΩ (r̄)
2
2
0
0
e dipende solo dalla posizione r̄ e non dal percorso di integrazione. Le configurazioni
di equilibrio del sistema rendono stazionario il potenziale complessivo Û dato da:
Z L
Z L
1
L
1
2 2
2
Û = p zG +
(s sin ϑ)2 ds =
γ Ω r ds = p cos ϑ + γ Ω
2
2
2
0
¸
∙ 0
2
1
L
2
= M gL cos ϑ +
(sin ϑ) Ω2
2
3
Si noti che il potenziale Û poteva anche essere calcolato direttamente come:
1
Û = p zG + Iz Ω2
2
in cui il momento d’inerzia rispetto all’asse di rotazione è:
1
Iz = M L2 (sin ϑ)2
3
La stazionarietà del potenziale fornisce la stessa equazione di equilibrio ricavata in
precedenza
¸
∙
dÛ
1
L2
2
= M −gL sin ϑ + 2 sin ϑ cos ϑ Ω = 0
dϑ
2
3
µ
¶
ML
2
2
sin ϑ
L cos ϑ Ω − g = 0
2
3