CAPITOLO 2 – AZIONAMENTI CON MOTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
CAPITOLO 2
Azionamenti con motore corrente continua ad eccitazione indipendente
2.1 - Struttura dell'azionamento
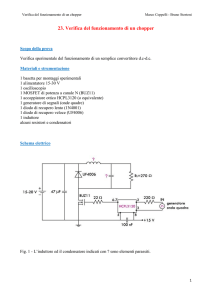
La struttura di principio di un azionamento con motore a corrente continua ad eccitazione
indipendente, per il quale si preveda sia il controllo di armatura che quello di campo, è illustrato in
Fig. 2.1.1. Il circuito di armatura e quello di eccitazione sono alimentati da due convertitori statici
che forniscono le desiderate tensioni di armatura ua e di eccitazione ue proporzionali ai
corrispondenti riferimenti ua,rif e ue,rif. Questi ultimo sono prodotti dal controllo dell'azionamento
che elabora i segnali di riferimento della velocità ωrif (o, quando è il caso, quello della coppia o
della posizione) e quelli di reazione, per esempio, con riferimento alla figura, i segnali di velocità e
quelli delle correnti di armatura e di eccitazione, ottenuti dai rispettivi trasduttori. Quando non è
prevista la regolazione di campo, l'eccitazione è alimentata a tensione costante (o addirittura
realizzata con magneti permanenti).
i e,mis
ie
Controllo di ue,rif
campo
Convertitore +
T ie
ue
di campo
_
ia
+
ω rif
Controllo di ua,rif
armatura
Convertitore
di armatura
ua
ω
_
ω mis
i a,mis
T ia
Tω
Fig. 2.1.1 - Struttura generale di un azionamento con motore c.c.
Numerose sono le configurazioni possibili dei convertitori statici. Alcune di esse saranno
esaminate in dettaglio nel seguito di questo capitolo.
2.2 – Componenti elettronici di potenza
N.B. Informazioni sui materiali semiconduttori e sui componenti: diodo, transistor JFET, BJT e
IGBT sono scaricabili dal sito www.die.unipd.it >> attività didattica >>docenti >>Bolognani
>>Corso di Applicazioni Elettriche industriali 2004-05 (autore prof. M.Zigliotto).
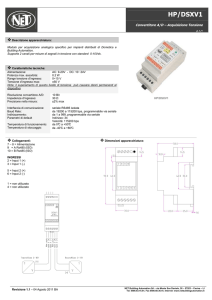
2.2.1 – Thyristor (Tiristore), SCR, GTO
I Thyristor (Tiristori) costituiscono una famiglia di componenti elettronici al silicio a 4 strati,
alternativamente con drogaggio p e n. Di essi i componenti più noti e utilizzati sono l’SCR (Silicon
Controlled Rectifier) o Diodo controllato e il GTO (Gate Turn-Off thyristor). Per piccole potenze è
18/06/2007
A.E.I. x IG M a.a 2004-05
1 di 9
CAPITOLO 2 – AZIONAMENTI CON MOTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
impiegato anche il TRIAC, componente che integra nella sua struttura interna un anti-parallelo di
due SCR (parallelo in opposizione di connessione).
SCR – L’SCR è un diodo al silicio pilotabile. Esso si differenzia dal normale diodo al silicio per il
fatto che può interdire il passaggio della corrente in entrambe le direzioni. Nella direzione positiva
di conduzione (dall’anodo A al catodo K), esso può venire reso conduttore mediante un impulso di
corrente inviato ad un elettrodo ci controllo detto Gate (G). Una volta che la corrente diretta si è
instaurata, l’impulso di controllo può essere rimosso e l’SCR rimane conduttore. Solo quando la
corrente che lo percorre scende, per la dinamica propria del circuito in cui il componente è inserito,
al disotto di un determinato piccolo valore (corrente di mantenimento), l’SCR si spegne e si porta
allo stato di non conduttore. L’elettrodo di controllo non ha alcuna capacità di spegnimento, cioè
di portare il componente in stato di non conduzione mentre è percorso da corrente.
Sono oggi disponibili SCR capaci di condurre, quando sono in stato di conduzione, migliaia di
ampere e di sostenere, quando in stato di non conduzione, migliaia di volt.
A
A
p
(E)
p
(B)
n
R
R
n
+
G
p
n
E
(C)
n
(C) p
K
G (B)
E
p
n
A
+
G
(E)
K
K
Fig. 2.2.1 – Struttura di principio di un SCR; sua scomposizione in due transistor; simbolo.
L’SCR ha due strati di silicio drogati p e due strati drogati n, vedi Fig. 2.2.1. Esso possiede tre
elettrodi: l’anodo A, il catodo K e l’elettrodo di pilotaggio (Gate) G. Se si applica al componente
una tensione positiva (polo positivo sull’anodo e negativo sul catodo), mentre esso è non in
conduzione (interdetto) e nessuna corrente è inviata al Gate, la tensione è sostenuta dalla giunzione
centrale dell’SCR che si comporta come un diodo polarizzato negativamente. Se si inverte, nelle
stesse condizioni, la polarità della tensione applicata, il componente rimane ancora interdetto e la
tensione è sostenuta dalle altre due giunzioni ( se G è collegato a K, la tensione è sostenuta dalla
prima giunzione vicina all’anodo). Quindi con SCR spento e senza corrente al terminale di Gate il
componente rimane sempre spendo (non in conduzione) qualsiasi sia la polarità della tensione
applicata.
Se l’SCR è polarizzato negativamente, niente cambia se si invia una corrente al terminale di
gate. Diverso è invece il funzionamento se interviene una corrente al terminale di Gate mentre il
componente è polarizzato positivamente, perché in tal caso esso entra in conduzione e, da quel
momento, si comporta come un diodo normale. Tale comportamento può essere compreso
immaginando di “tagliare” il componente lungo la linea tratteggiata mostrata nella porzione di
sinistra della Fig. 2.2.1 per riconoscere che esso è assimilabile alla connessione di due transistor
(pnp e npn) come nello schema centrale della stessa figura. Se ora, mentre il componente è
polarizzato positivamente si invia una corrente alla base B del transistor npn (che corrisponde ad
inviare una corrente al Gate), questi entra in conduzione, ovvero una corrente lo può percorrere dal
collettore C all’emettitore E. La corrente di collettore è però corrente di base B per il transistor pnp
superiore che pure quindi entra in conduzione consentendo un passaggio di corrente dal suo
emettitore E al collettore C e quindi alla base del transistor npn. La corrente di Gate può ora essere
rimossa in quanto ciascun transistor pilota e mantiene in conduzione l’altro determinando la
conduzione dell’intero SCR dal suo anodo A al catodo K con una caduta di tensione fra 1,5 e 2 V o
18/06/2007
A.E.I. x IG M
a.a 2004-05
2 di 9
CAPITOLO 2 – AZIONAMENTI CON MOTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
poco più per i componenti di maggiori dimensioni. Il ritorno allo stato di interdizione si realizza
quando la corrente dell’SCR scende al di sotto della corrente di mantenimento.
GTO – La struttura fisica interna di un SCR non consente ad una corrente negativa di Gate di
spegnere il componente, che rimane comunque in conduzione in alcune porzione della sua sezione.
Un diversa è più efficiente struttura dello strato connesso al terminale di Gate è invece realizzato
nel componente GTO che cosi acquisisce la capacità di essere anche spento con una corrente
negativa di gate di adeguata ampiezza. Per il resto il GTO ha caratteristiche del tutto simili a quelle
di un SCR.
2.3 - Convertitori c.c/c.c. per azionamenti
I convertitori continua-continua (c.c./c.c., o chopper) sono dispositivi atti a convertire una
tensione continua in ingresso in una tensione d'uscita di valore medio diverso. Essi vengono usati
negli azionamenti elettrici come alimentatori per i motori a corrente continua che necessitano di
sorgenti di tensione continua e variabile per il controllo delle principali grandezze elettriche e
meccaniche.
I convertitori possono essere convenientemente classificati in base ai quadranti nel piano
tensione media-corrente media in cui sono in grado di funzionare. Allo scopo si fissino le
convenzioni di segno come in Fig. 2.3.1 a), precisamente quelle degli utilizzatori per la porta di
ingressi 1 e quelle dei generatori per la porta 2 (quella collegata al carico motore: armatura o
eccitazione). In Fig. 2.3.1 b), c), d) ed e) sono riportate le quattro principali classi di
funzionamento.
I
I1
I
2
U2
I2
+
+
U1
-
U2
-
a)
I
2
2
U2
b)
U2
c)
I2
I
I2
U2
2
U2
U2
e)
d)
Fig.2.3.1 - Classi di funzionamento dei convertitori c.c./c.c.
Se il convertitore è in grado di produrre tensione U2 unipolare e corrente I2 unidirezionale,
entrambe positive, ha una regione di funzionamento confinata nel 1° quadrante del piano tensionecorrente (Fig.2.3.1b); è questo ad esempio il caso del chopper abbassatore (buck converter o stepdown chopper) destinato per esempio ad alimentare un motore c.c. previsto per un impiego con un
unico senso di marcia e una coppia sempre positiva. Il termine "abbassatore" si riferisce alla
caratteristica del convertitore di trasferire energia elettrica da una sorgente a tensione più alta (in
questo caso la rete di alimentazione in c.c.) verso una a tensione più bassa (la tensione ai capi del
motore); i dettagli del funzionamento di questo convertitore saranno illustrati nel par.2.3.1.
Differenti disposizioni degli interruttori di potenza consentono di ottenere ancora convertitori con un solo quadrante
di funzionamento, ma con segno negativo della potenza erogata: secondo o quarto quadrante, Fig. 2.3.1 c). Una
applicazione usuale è l'alimentazione di un motore c.c. trascinato dal carico meccanico. In tal caso il convertitore
essenzialmente "si rovescia" rispetto al caso di Fig. 2.3.1 b), ed esplica la funzione di trasferire energia elettrica da una
sorgente a tensione più bassa (che è la tensione media ai capi del motore) verso una sorgente a tensione più alta (la rete di
18/06/2007
A.E.I. x IG M a.a 2004-05
3 di 9
CAPITOLO 2 – AZIONAMENTI CON MOTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
alimentazione in c.c.); per questo viene detto convertitore elevatore (boost converter o step-up chopper). Come si è detto,
il flusso di energia sarà diretto dal carico meccanico (che trascina il motore) verso la rete di alimentazione; questo
funzionamento è detto rigenerativo; tale attributo si riporta talvolta anche al convertitore (chopper rigenerativo).
Combinando infine le strutture che consentono le regioni di funzionamento b) e c) si ottengono convertitori a due
quadranti del tipo di Fig. 2.3.1.d). Si parla in tal caso di chopper a due quadranti. Queste classi di convertitori, non molto
comuni in pratica, non saranno descritte in queste note.
L'ultima configurazione è relativa al convertitore più completo, che è in grado di operare in tutti
i quattro quadranti di funzionamento (Fig.2.3.1e). Esso prende il nome di chopper a quattro
quadranti, e viene utilizzato per alimentare motori funzionanti in entrambi i sensi di marcia, con
possibilità di frenatura rigenerativa (ovvero con ritorno di potenza verso l'alimentazione) per
entrambe le direzioni; uno schema di principio verrà analizzato nel par.2.3.2.
2.3.1 - Convertitore c.c./c.c. (abbassatore) a un quadrante - I convertitori abbassatori di tensione
(detti anche buck converters o step-down choppers) vengono usati quando si desidera trasferire
energia da una fonte a tensione più elevata verso un carico a tensione inferiore o al più uguale a
quella presente all'ingresso del convertitore stesso, come è il caso di una carico-motore in c.c. di un
azionamento. Se non è richiesta l'inversione della corrente (coppia), nè della tensione (velocità), si
può adottare un chopper ad 1 quadrante, il cui schema di principio è riportato in Fig.2.3.2.
i
i
2
1
S
+
+
L
u2
U1
+
D
E
-
Fig.2.3.2 - Schema di principio del convertitore c.c./c.c. abbassatore
Nello schema S rappresenta un interrutore statico, capace di spegnimento forzato (p.e. un
IGBT), scelto in base alle specifiche di potenza e velocità di commutazione della particolare
applicazione; si suppone che esso sia in grado di condurre solo nel verso positivo assegnato alla
corrente i1.
La sorgente di tensione continua all'ingresso è stata denominata U1 e nel seguito della
trattazione sarà ritenuta costante.
Solitamente la tensione d'ingresso U1 è ricavata tramite un convertitore c.a./c.c.; l'impiego di due
convertitori in cascata (c.a./c.c. e c.c./c.c.) è giustificato in quanto globalmente si ottiene un convertitore con
banda passante di molto superiore a quella dei semplici convertitori c.a./c.c., che rimane legata al periodo
della tensione di alimentazione.
Il carico è stato schematizzato con la serie di una induttanza L (per esempio l’induttanza di
armatura del motore) e di un generatore di forza elettromotrice E ≤ U1 (per esempio la f.e.m.
indotta in un motore c.c.). Le componenti resistive nel carico sono state trascurate. Tensione e
corrente ai capi di tale carico sono stati denotati rispettivamente con u2 ed i2, dove il carattere
minuscolo sta ad indicare che si tratta di grandezze variabili nel tempo: u2(t) e i2(t). Per i
componenti presenti nel circuito si riconosce che deve essere in ogni istante u2(t) ≥ 0 e i2(t) ≥ 0 e
18/06/2007
A.E.I. x IG M
a.a 2004-05
4 di 9
CAPITOLO 2 – AZIONAMENTI CON MOTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
pertanto anche i rispettivi valori medi saranno U2 ≥ 0 e I2 ≥ 0, il che giustifica il funzionamento
limitato al primo quadrante del piano tensione-corrente.
Per spiegare il principio di funzionamento del circuito si faccia riferimento al funzionamento a
regime. L'interruttore statico S viene ciclicamente acceso (chiuso) e spento (aperto) per intervalli di
durata TON e TOFF rispettivamente. In Fig. 2.3.2 sono mostrati i percorsi della corrente di carico
con interruttore S chiuso e aperto. Nel secondo caso, la natura induttiva del carico impone la
richiusura della corrente attraverso il diodo D (diodo di libera circolazione o di free wheeling).
Possibili andamenti delle principali grandezze del convertitore sono pertanto quelle illustrate in
Fig. 2.3.3.
In particolare la Fig. b) mostra che la corrente, pur non essendo rigorosamente costante, risulta
sempre maggiore di zero. Si parla allora di funzionamento continuativo del convertitore, in
contrapposizione al funzionamento intermittente nel quale la corrente durante la sua fase
decrescente raggiunge il valore nullo e vi permane per un certo intervallo di tempo prima di
riprendere a salire al manifestarsi del successivo intervallo TON.
Con riferimento al funzionamento continuativo si possono ricavare le seguenti relazioni:
u (t)
2
U
T
ON
T
OFF
1
U
2
t
T
s
i (t)
2
I
2,max
I
∆I
2
(a)
Conduce
S
D
2,min
I
2
t
(b)
i (t)
1
I
1
I
2
t
(c)
Fig.2.3.3 - Andamento delle principali grandezze di un chopper ad un quadrante
a) Tensione di uscita - La tensione di uscita vale u2(t)=U1 durante l'intervallo TON (interruttore S
chiuso, diodo D interdetto) e u2(t)=0 durante l'intervallo TOFF (interruttore S aperto, diodo D in
conduzione), come mostra la Fig. 2.3.3a). Il suo valor medio vale allora:
T
U 2 = U1 ON = U1δ
Ts
(2.3.1)
ove il rapporto
T
δ = ON
Ts
18/06/2007
(2.3.2)
A.E.I. x IG M a.a 2004-05
5 di 9
CAPITOLO 2 – AZIONAMENTI CON MOTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
è detto duty cycle (meno usuale, ciclo utile) e Ts è il periodo di switching o di commutazione,
definito in Fig. 2.3.3 a) e pari a Ts = TON +TOFF.
b) Corrente di uscita - La corrente di uscita i2(t) è crescente durante l'intervallo TON con derivata
(U1-E)/L e decrescente durante l'intervallo TOFF con pendenza -E/L. A regime il valore finale di
i2(t) nel periodo Ts coincide al suo valore iniziale. Ne risulta che l'ondulazione di corrente ∆I2,
definita in Fig. 2.3.3b) si può valutare indifferentemente con riferimento all’intervallo TON o TOFF
risultando nei due casi:
∆I 2 = I 2, max − I 2, min =
(U1 − E ) T
L
ON
(2.3.5)
E
∆I 2 = I 2,max − I 2,min = TOFF
L
uguagliando le due relazioni si trova che a regime deve valere:
E = U 1δ
e cioè pari a U2 e quindi
∆I 2 =
U1 (1 − δ )
δ
Lf s
dove si è indicata con fs=1/Ts la frequenza di switching, cioè la frequenza di ripetizione del ciclo
del convertitore. L'andamento di ∆I2 in funzione di δ è riportato graficamente in Fig.2.3.4, dalla
quale emerge che si ha la situazione più sfavorevole in corrispondenza di un duty cycle del 50%,
per il quale vale
1 U1
∆I 2, max = ∆I 2 δ = 0.5 =
4 Lf s
(2.3.6)
∆I
∆I
2
2,max
0
0.5
1
δ
Fig.2.3.4 - Andamento dell'ondulazione di corrente in funzione del duty cycle δ
L'espressione (2.3.6) è utile in sede di progetto del convertitore per stabilire se l'induttanza
propria del motore sia sufficiente a contenere l'ondulazione di corrente (e dunque di coppia) entro
le specifiche dell'azionamento. Se così non fosse, si può intervenire sia aumentando la frequenza di
18/06/2007
A.E.I. x IG M
a.a 2004-05
6 di 9
CAPITOLO 2 – AZIONAMENTI CON MOTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
commutazione (che ha però un limite superiore legato ai dispositivi di commutazione) o inserendo
in serie al circuito di armatura un induttore di opportuno valore.
Se per un momento si prescinde dalla realtà fisica del carico e si considera ideale ed indipendente il
generatore di f.e.m. E2, si può notare come la corrente media I2 a regime dipenda solo dalla storia passata, ovvero
dalla successione dei diversi valori di δ che sono di seguito stati imposti al convertitore per ottenere il desiderato valore
della corrente stessa. In altre parole, a parità di E2, qualunque valore di corrente può essere ottenuto applicando per un
determinato numero di periodi Tc un δ opportuno, maggiore o minore di quello indicato dalla (2.3.4), a seconda che si
desideri un incremento o un decremento della corrente rispetto al valore attuale. Quanto detto vale naturalmente nella
ipotesi che il carico sia puramente induttivo. Nella pratica, esso avrà comunque carattere ohmico-induttivo, per cui a
regime la tensione media ai capi del carico differirà dalla f.e.m. E2 per la caduta sulla parte resistiva del carico.
b) Corrente di ingresso - La Fig. 2.3.3 c) mostra l'andamento della corrente i1(t), che è diverso da
zero e pari a i2(t) solo durante gli intervalli TON. Anche il valor medio della i1(t) si può facilmente
valutare con procedura analoga a quella impiegata per il calcolo di U2 e risulta pari a:
I1 = I 2 δ
(2.3.7)
come si evince anche dal bilancio delle potenze medie in ingresso e in uscita del convertitore.
Confrontando la (2.3.1) con la (2.3.7) si riconosce che il chopper abbassatore ad un quadrante
equivale, per quanto riguarda le componenti medie di tensione e corrente, ad un trasformatore con
rapporto di trasformazione 1:δ.
Alcuni dei risultati sopra esposti non sono validi durante il funzionamento intermittente.
Tuttavia nelle normali applicazioni il valore di induttanza L è tale che ∆I2,max è minore della
minima corrente assorbita dal carico (motore) e pertanto il funzionamento intermittente di solito
non si manifesta. Esso non viene pertanto trattato in queste note, rimandando a testi specialistici per
la sua descrizione.
2.3.2 - Chopper a quattro quadranti - Il convertitore più completo, bipolare e bidirezionale, è il
convertitore (o chopper) a quattro quadranti, di cui uno schema di principio è riportato in
Fig.2.3.5.
i
+
1
S 1
S 3
D1
U1
i
D3
2
+
L
+
S 2
D2
u2
E
-
S 4
D4
Fig.2.3.5 - Schema di principio del chopper a quattro quadranti
18/06/2007
A.E.I. x IG M a.a 2004-05
7 di 9
CAPITOLO 2 – AZIONAMENTI CON MOTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
In questo caso, i comandi di chiusura ai dispositivi di commutazione giacenti sullo stesso ramo del
convertitore (ad esempio, S1 ed S2, o S3 ed S4) saranno complementari, per non provocare
cortocircuiti dell'alimentazione.
Una tecnica delle tecniche di commutazione di più frequente impiego consiste nel comandare in
chiusura alternativamente le coppie (S1, S4) e (S2, S3). Supponendo sempre un carico di tipo L-E,
con -U1 ≤ |E| ≤ U1, gli andamenti a regime della tensione e della corrente sul carico risultano quelli
di Fig.2.3.6.
u2(t)
TON
TOFF
U1
U2
-U
t
(a)
t
(b)
1
T
s
Conducono
D1D4 S1S4 D2D3 S2S3
i (t)
2
I
i (t)
1
I1
2
t
(c)
Fig.2.3.6 - Andamento di tensioni e correnti nel chopper a quattro quadranti
Durante la chiusura di S1 ed S4, al carico è applicata la tensione positiva U1; la corrente i2
pertanto cresce con pendenza (U1-E)/L. Alla fine dell'intervallo TON, vengono comandati in
apertura gli interruttori S1 ed S4 e in chiusura S2 ed S3. La corrente i2 non può però invertirsi
bruscamente, per cui, per l'insorgere di una opportuna tensione ai capi di L, entrano in conduzione i
diodi D2 e D3. Questi applicano la tensione -U1 al carico, smorzando la corrente i2 con pendenza (U1+E)/L fino eventualmente ad annullarla come in Fig. 2.3.6b). Da quel momento, entra in
conduzione la coppia S2, S3 e la corrente diventa negativa, decrescente fino alla fine del periodo Ts.
A differenza del convertitore ad un solo quadrante, il chopper a quattro quadranti non ha mai
funzionamento intemittente, in quanto permette correnti di carico di entrambi i versi,
indipendentemente dal segno della tensione applicata.
Con procedura simile a quella già vista si ricava che la tensione media sul carico è data da
U 2 = E = U1 (2δ − 1)
(2.3.7)
dove si è posto ancora δ = TON/Ts, TON essendo il periodo nel quale la tensione sul carico vale +U1
(cfr (fig. 2.3.6a)).
18/06/2007
A.E.I. x IG M
a.a 2004-05
8 di 9
CAPITOLO 2 – AZIONAMENTI CON MOTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
L'ondulazione di corrente ∆I2 si calcola in modo del tutto analogo a quanto già visto; essa vale
∆I 2 =
(U1 − E ) T
L
ON
=
2 U1δ(1 − δ )
Lf s
(2.3.8)
dove fs=1/Ts.
I chopper a quattro quadranti consentono la marcia e la frenatura rigerativa in entrambi i versi di
rotazione del carico. Essi trovano largo impiego per esempio negli azionamenti in c.c. per
macchine utensili, ove le specifiche di elevata dinamica degli anelli di controllo e la necessità di
rapide inversioni di velocità giustificano il costo dei componenti del convertitore stesso.
La frequenza di commutazione dei convertitori c.c./c.c. va normalmente da qualche kHz (per
alte potenze, dell'ordine delle decine o centinaia di kW) a 100 KHz o più per azionamenti di
piccola potenza (100 W o meno).
18/06/2007
A.E.I. x IG M a.a 2004-05
9 di 9