Università degli Studi di Bologna – II Facoltà di Ingegneria con sede a Cesena
PROGRAMMA del CORSO di
MECCANICA APPLICATA ALLE MACCHINE
Corso di Laurea in INGEGNERIA MECCANICA
Corso di Laurea in INGEGNERIA AEROSPAZIALE
Anno Accademico 2010-2011
prof. Alessandro RIVOLA
(Tel. 0543.374441
e-mail: [email protected])
1. Composizione dei meccanismi.
Macchine e loro classificazione. Macchina e meccanismo. Elementi cinematici e coppie cinematiche. Gradi
di libertà di un meccanismo nel piano e nello spazio. Applicazione della formula di Grubler: esempi e limiti.
2. Richiami di cinematica del corpo rigido.
Cinematica del punto nel piano. Cinematica del corpo rigido nel piano. Centro di istantanea rotazione.
Teorema di Kennedy-Aronhold e suoi corollari. Accelerazione dei punti di un corpo rigido nel piano. Moti
relativi.
3. Analisi cinematica di meccanismi.
Modello cinematico. Analisi e sintesi. I sistemi articolati piani: il quadrilatero articolato; regola di Grashof; la
catena cinematica 3R-1P; applicazioni. Meccanismi in catena aperta e catena chiusa. Il manipolatore piano
R-R. Analisi cinematica per via grafica del manovellismo di spinta e del quadrilatero articolato. Analisi
cinematica per via analitica del manovellismo di spinta (con espressioni approssimate del I e II ordine) e del
quadrilatero articolato. Coefficienti di velocità e accelerazione. Analisi cinematica per via analitica:
approccio generale; Jacobiano; singolarità. Analisi numerica di posizione.
4. Richiami di statica e dinamica.
Le equazioni cardinali della Statica. Diagrammi di corpo libero. Principio di sovrapposizione degli effetti.
Metodi diretti grafici ed analitici per l’analisi statica. Metodi energetici: il principio dei lavori virtuali (PLV).
Azioni di inerzia risultanti in un corpo rigido. Energia cinetica di un corpo rigido. Equazioni della dinamica:
principio di d’Alembert; equazione dei lavori.
5. Forze agenti sulle macchine. Rendimento.
Forze di contatto. Coefficiente di attrito. Lavoro delle forze d’attrito. Generalità sul rendimento. Definizione
di rendimento. Rendimento di macchine in serie e in parallelo. Moto retrogrado. Rendimento nel moto
retrogrado. Leggi che governano l’attrito di strisciamento. Attrito di strisciamento in condizioni di
lubrificazione limite. Valori del coefficiente di attrito. L’usura e l’ipotesi del Reye. Attrito di rotolamento.
Applicazioni di elementi rotolanti. Trasporto con rulli.
6. Analisi statica di meccanismi.
Reazioni vincolari nelle coppie cinematiche elementari. Analisi statica grafica e analitica di meccanismi
piani. Analisi statica di meccanismi piani con il PLV. L’attrito nelle coppie cinematiche. Coppia prismatica,
piano inclinato, coppia rotoidale, coppia elicoidale. Comportamento delle ruote nella locomozione. Analisi
statica di meccanismi piani con attrito: analisi per via grafica.
7. Componenti ed organi delle macchine.
Ingranaggi. Profili ad evolvente. Proporzionamento delle dentature. Dentiera di riferimento. Rapporto di
trasmissione. Cenni sulla fabbricazione delle ruote dentate. Ingranaggi cilindrici a denti dritti ed elicoidali.
Forze trasmesse. Ruote dentate coniche. Ingranaggio a vite e ruota a denti elicoidali. Rotismi ordinari.
Rotismi epicicloidali. Formula di Willis. Differenziale per trazione automobilistica.
Applicazioni degli organi flessibili. Puleggia fissa e puleggia mobile. Paranco. Paranco differenziale.
Trasmissione del moto mediante cinghie piatte e trapezoidali. Freni a nastro ordinari e differenziali.
Freni ed innesti. La coppia rotoidale di spinta; freni e innesti a frizione a dischi e conici; freno a ceppi.
8. Dinamica della macchina alternativa.
Masse di sostituzione. Azioni di inerzia nel manovellismo di spinta. Analisi cinetostatica del manovellismo di
spinta. Compensazione delle forze di inerzia. Equilibramento della macchina monocilindrica e pluricilindrica.
C:\users\rivola\Didattic\FORLI\MaM\Prog1011_MaM.doc
9. Dinamica dei rotori (cenni).
Squilibrio statico e dinamico di un rotore.
10. Dinamica dei sistemi funzionanti in condizioni di regime periodico.
Regime periodico. Grado di irregolarità. Calcolo del momento d’inerzia del volano.
11. Vibrazioni meccaniche.
Sistemi vibranti e loro modellazione. Vibrazioni libere e forzate di un sistema vibrante smorzato ad un grado
di libertà. Risposta armonica. Isolamento delle vibrazioni: eccitazione della massa; eccitazione della base
(sismografo).
Testi di riferimento
Funaioli E., Maggiore A., Meneghetti U., Lezioni di Meccanica applicata alle macchine. Prima parte:
Fondamenti di Meccanica delle Macchine, ed. Pàtron, Bologna.
Doughty S., Mechanics of Machines, John-Wiley & Sons, 1988.
Paul B., Kinematics and dynamics of planar machinery, Prentice-Hall, 1979.
Dispense integrative redatte dal docente.
Modalità di esame
La prova finale d'esame è orale e prevede tre domande sugli argomenti svolti durante le lezioni e le
esercitazioni.
Per ciascun appello d’esame i candidati devono iscriversi utilizzando esclusivamente il sito internet
https://almaesami.unibo.it entro le ore 12 del giorno che precede l’appello.
Propedeuticità consigliate
Meccanica Razionale L
Programma, informazioni e altro materiale sono disponibili ai siti:
http://diem1.ing.unibo.it/mechmach/rivola.html
http://www.unibo.it/docenti/alessandro.rivola
C:\users\rivola\Didattic\FORLI\MaM\Prog1011_MaM.doc
Università degli Studi di Bologna – II Facoltà di Ingegneria con sede a Cesena
PROGRAMMA del CORSO di
MECCANICA APPLICATA ALLE MACCHINE L
Corso di Laurea in INGEGNERIA MECCANICA
Corso di Laurea in INGEGNERIA AEROSPAZIALE
prof. Alessandro RIVOLA
[email protected]
LA MECCANICA APPLICATA ALLE MACCHINE
1. La Meccanica applicata alle macchine è la disciplina che, nel settore della
Meccanica dell'Ingegneria, si occupa dei problemi connessi con il movimento dei corpi
solidi di cui sono costituite le macchine, distinguendosi in ciò dalla Scienza delle
costruzioni - che tratta le strutture, soggette a situazioni statiche - e dalla Meccanica
dei fluidi. Si può dire pertanto che la Meccanica applicata alle macchine studia i
problemi che nascono per il fatto che gli organi delle macchine e dei meccanismi sono
dotati di moto; gli organi che si considerano sono solitamente corpi solidi, essendo
demandato ad altre discipline il compito di considerare il caso in cui siano presenti
nella macchina anche fluidi con funzioni fondamentali (e non accessorie, come ad
esempio nel caso del lubrificante).
2. La Meccanica applicata alle macchine tratta innanzi tutto alcuni problemi relativi
alla Composizione delle macchine, come i gradi di libertà di un meccanismo, e
fornisce alcune definizioni fondamentali, come quella di rendimento meccanico.
Formano poi oggetto di studio della Meccanica applicata alle macchine i problemi
riguardanti il contatto fra gli organi delle macchine durante il loro moto relativo: essi
vengono studiati da quella parte della disciplina che prende il nome di Tribologia.
Questi problemi riguardano prima di tutto l'attrito di strisciamento e i suoi effetti:
modalità di trasmissione delle forze, dissipazione di energia, usura. Si considerano
poi l'attrito di rotolamento e i principali casi di interesse tecnico in cui lo si incontra,
come le ruote e i cuscinetti a rotolamento. Infine, in stretta connessione con i problemi
precedenti, si studiano i principali tipi di lubrificazione (idrodinamica,
elastoidrodinamica, idrostatica) e i più importanti organi lubrificati, come i perni
portanti e reggispinta.
Una vasta gamma di problemi nascono poi dalla considerazione del comportamento
delle macchine e dei meccanismi sotto l'aspetto funzionale. Nella parte della
Meccanica applicata alle macchine che va sotto il nome di Teoria dei meccanismi si
descrivono le principali classi dei meccanismi e dei loro componenti, come i sistemi
articolati, i giunti, le camme, le ruote dentate e i rotismi, i freni, gli organi flessibili. Per
ognuna di tali classi si espongono i fondamenti delle metodologie che permettono di
affrontare i più importanti problemi tecnici relativi al funzionamento dei meccanismi
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\00Introduzione.doc
0–1
stessi, come la realizzazione di determinati movimenti, la trasmissione del moto, la
trasmissione delle forze .
In conseguenza del movimento impresso agli organi delle macchine, nascono in questi
delle azioni d’inerzia, alle quali sono connessi molti importanti problemi. Quelli che
possono venire studiati prescindendo, almeno in linea di principio, dalla deformabilità
dei corpi, vengono studiati nella Dinamica delle macchine: si tratta dei problemi
relativi al calcolo e al bilanciamento delle azioni di inerzia, all'accoppiamento fra
motore e macchina utilizzatrice, al funzionamento delle macchine e degli impianti a
regime periodico, ai transitori meccanici. I problemi strettamente connessi con la
deformabilità elastica dei corpi vengono invece trattati nella Meccanica delle
vibrazioni, che affronta problemi di grande rilevanza tecnica come, fra gli altri,
l'isolamento delle vibrazioni, l'analisi modale, la diagnostica industriale. Una grande
rilevanza tecnica hanno infine, come è evidente, i problemi relativi alla Dinamica dei
rotori, quali il bilanciamento statico e dinamico, le velocità critiche flessionali, le
oscillazioni torsionali, i problemi di instabilità.
3. Se dal punto di vista dei contenuti l'elemento unificante dei vari settori della
Meccanica applicata alle macchine è, come abbiamo visto, il movimento, da quello
metodologico l'elemento caratterizzante è la modellazione dei sistemi meccanici, che
fornisce il mezzo fondamentale per affrontare in modo corretto ed efficiente l'ampia
gamma dei problemi della meccanica delle macchine. Per affrontare lo studio di un
qualsiasi sistema meccanico è necessario infatti formularne dapprima un adeguato
modello fisico e successivamente dedurre da questo il relativo modello matematico.
Per modello fisico si intende qui un sistema fisico immaginario che sia equivalente al
sistema reale nell'ambito di una prefissata approssimazione e rispetto alle
caratteristiche che riguardano lo studio a cui si è interessati. Prerogativa essenziale
del modello fisico, ai fini della sua effettiva utilità, deve essere la possibilità di
studiarlo con gli strumenti a disposizione, di regola di tipo matematico. Il passaggio
dal sistema reale al suo modello fisico comporta un certo numero di approssimazioni
consapevolmente accettate, la più importante delle quali consiste nel trascurare tutto
quanto provoca effetti piccoli, o comunque ritenuti trascurabili, sul comportamento del
sistema.
Una volta individuato il modello fisico del sistema, si può procedere a determinarne il
modello matematico, cioè un insieme di relazioni matematiche che descrivono il
comportamento del modello fisico stesso. Si passerà infine alla realizzazione di un
algoritmo di risoluzione delle equazioni del modello matematico. Solo in casi semplici
la soluzione può venire ottenuta in forma chiusa: di solito si ottiene la soluzione per via
numerica, mediante l'uso di un calcolatore. In alcuni casi, infine, può essere preferibile
risolvere il problema per via grafica: agli ovvi inconvenienti della lentezza e della
scarsa precisione si accompagnano, infatti, gli importanti vantaggi della chiarezza e
della sicurezza interpretativa dei risultati.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\00Introduzione.doc
0–2
Esempi di meccanismi piani.
Esempi di meccanismi spaziali
Robot seriale RRRS (a) e piattaforma parallela 3-RPS (b).
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\01Composizione_Meccanismi.doc
1–1
Esempio di meccanismo spaziale: il giunto di Cardano
Meccanismi piani contenti solo coppie prismatiche a 1 gdl (a) e 2 gdl (b).
Meccanismo con glifo a croce
Quadrilatero articolato (a) e manovellismo di spinta (b) isostatici
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\01Composizione_Meccanismi.doc
1–2
Sospensione McPherson (a) e suo modello cinematico (b).
Sospensione McPherson dell’Alfa 147 e 156.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\01Composizione_Meccanismi.doc
1–3
Impiego di sistemi articolati: elevatore; escavatore.
Manipolatore S.C.A.R.A.
C:\users\rivola\Didattic\FORLI\MaM\Dispense\01Composizione_Meccanismi.doc
1–4
RICHIAMI DI CINEMATICA DEL PUNTO NEL PIANO.
Posizione del punto
P(t) = (P-O) = x(t) i + y(t) j
P = x(t) + i y(t)
forma cartesiana
P = |P| exp(iq)
forma polare
|P| modulo
q anomalia
Significato del vettore posizione P (a) e sua corrispondenza con il numero complesso P (b).
Velocità del punto
V (t) =
d P(t)
= x& (t) i + y& (t) j = Vx i + Vy j
dt
V = x& + i y& = Vx + i Vy
V = | P& | e iq + iq& | P | e iq =| V | e ia
Significato del vettore velocità V (a) e sua corrispondenza con il numero complesso V (b).
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\02Richiami_Cinematica.doc
2–1
Il termine | P& | e iq ha anomalia pari a q
ip
i (p +q )
Il termine iq& | P | e iq = e 2q& | P | e iq = e 2 q& | P | è ad esso perpendicolare
Il vettore velocità è tangente alla traiettoria del punto. Infatti:
tga =
Vy
Vx
=
y& dy
=
x& dx
Accelerazione del punto
a(t) =
d V (t)
= &x&(t) i + &y&(t) j
dt
a = &x& + i &y&
a = | V& | e ia + ia& | V | e ia = a t + an
Il termine at =| V& | e ia ha anomalia pari a a e quindi è tangente la traiettoria in P. Il suo modulo
indica la variazione del modulo della velocità.
(
i p +a
)
è ad esso perpendicolare e quindi è normale alla
Il termine an = ia& | V | e ia = a& | V | e 2
traiettoria in P. Il suo modulo indica la variazione della direzione della velocità.
Essendo:
si ha:
a& =
|V |
dove r è il raggio del cerchio oscuratore in P
r
| V |2 ia
a = | V& | e ia + i
e
r
Significato del vettore accelerazione a (a) e sua corrispondenza con il numero complesso a (b).
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\02Richiami_Cinematica.doc
2–2
RICHIAMI DI CINEMATICA DEL CORPO RIGIDO NEL PIANO.
Teorema di Kennedy-Aronhold.
Allineamento dei centri di istantanea rotazione.
Velocità e accelerazioni dei punti di un corpo rigido.
Descritto il moto del corpo utilizzando due coordinate di un suo punto qualsiasi A e la rotazione b
del corpo stesso, la posizione di un altro punto B appartenente al corpo può essere espressa come:
B = x B + i y B = x A + i y A + | AB | e ib
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\02Richiami_Cinematica.doc
2–3
Teorema di Rivals per le velocità
VB = VA + ω Ù ( B - A)
VB = VAx + i VAy + b& | AB | e
(
i p +b
2
)
= VA + VBA
Teorema di Rivals per le accelerazioni
& Ù ( B - A) + ω Ù (ω Ù ( B - A)) = a A + ω
& Ù ( B - A) - ω 2 ( B - A)
aB = aA + ω
i (p + b )
a B = a Ax + i a Ay + b&& | AB | e 2 - b& 2 | AB | e ib = aA + a BAt + aBAn
a B = a A + i b&& | AB | e ib - b& 2 | AB | e ib
(
)
a BA = aB - aA =| AB | e ib i b&& - b& 2 =| AB | e ib K
K = - b& 2 + i b&& =| K | e i(p -f )
b&&
tgf = & 2
b
a BA = | AB | | K | e i(p + b -f )
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\02Richiami_Cinematica.doc
2–4
SISTEMI ARTICOLATI.
Il quadrilatero articolato piano.
Quadrilateri articolati piani di Grashof (G) e non.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3–1
Quadrilateri articolati piani: classe limite.
Parallelogramma articolato (a); antiparallelogramma articolato (b); quadrilatero isoscele (c).
La catena cinematica con tre coppie rotoidali e una prismatica.
In figura le linee tratteggiate mostrano una estensione comune del meccanismo nel caso in cui il
cedente debba possedere moto rettilineo alterno con ritorno rapido.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3–2
ANALISI CINEMATICA DI MECCANISMI.
Manipolatore piano R-R (manipolatore S.C.A.R.A.)
Manipolatore S.C.A.R.A.
Schema cinematico del manipolatore S.C.A.R.A.
B = x B + i y B = a eia + b ei (a + b )
x B = a cosa + b cos (a + b )
y B = a sin a + b sin (a + b )
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3–3
Manovellismo di spinta: esempio numerico.
Vettura Alfa Romeo GTV2000 (1971)
raggio manovella
lunghezza biella
r = 44.25 mm
l = 157 mm
regime di rotazione di potenza massima
5800 giri/min
Considerando la manovella nella posizione j = p/4
si ottiene (nell’ipotesi di regime costante di rotazione dell’albero motore):
s = 16 mm (misurato a partire dalla posizione di punto morto superiore)
v = 22.87 m/s
a = 11640 m/s2
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3–4
Manovellismo di spinta: confronto tra soluzioni esatte e soluzioni approssimate (del II e I ordine).
Soluzioni esatte al variare del rapporto l confrontate con le soluzioni approssimate del I ordine.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3–5
Coefficienti di velocità: confronto tra andamenti esatti e quelli approssimati del I e II ordine.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3–6
Manovellismo di spinta: espressioni esatte e approssimate (del II e I ordine) del moto del corsoio.
Espressioni esatte
Posizione
cos g = - 1 - l2 sin 2 j
Velocità
g& = lW
Accelerazione
cosj
cos g
s = l + r - r cosj - l 1 - l2 sin 2 j
s& = rW(sin j - cosj tgg )
& cosj
g&& l cosg = -rW 2 sin j + g& 2l sin g + rW
& sin j
&s& = rW 2 cosj - g& 2 l cos g - g&& l sin g + rW
Espressioni approssimate al II ordine
Posizione
cosg II = -1 +
l2
4
(1 - cos 2j )
l
æ l
ö
s II = r ç1 + - cosj - cos 2j ÷
4
è 4
ø
Velocità
l
ö
æ
s&II = rWç sin j + sin 2j ÷
2
ø
è
Accelerazione
& æç sin j + l sin 2j ö÷
&s&II = rW 2 (cosj + l cos 2j ) + rW
2
ø
è
Espressioni approssimate al I ordine
Posizione
s I = r (1- cosj )
Velocità
s&I = rW sin j
Accelerazione
& sin j
&s&I = rW 2 cosj + rW
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3–7
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3–8
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3–9
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3 – 10
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3 – 11
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3 – 12
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3 – 13
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3 – 14
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3 – 15
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3 – 16
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3 – 17
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\03Analisi_Cinematica.doc
3 – 18
RICHIAMI DI STATICA: ANALISI STATICA GRAFICA.
P
F2
F1
r
r3
r1
F1
A
r2
Equilibrio di due forze
a
F1
Equilibrio di tre forze convergenti
b
A
F1
F1
A
F2
F3
r1
F3
F2
r2
r1
r4
r3
Equilibrio di tre forze parallele
Equilibrio impossibile di quattro forze
r1
r2
F2¢
F1
r3
F1
F4¢
A
F2¢¢
r4
F2¢¢¢
F3¢¢
F3¢
F4¢¢
F4¢¢¢
F3¢¢¢
Equilibrio indeterminato di quattro forze
r1
F2
F1
r2
A
A
ra
F1
r4
r3
B
B
F3
F4
Equilibrio di quattro forze (metodo della retta ausiliaria)
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\04Richiami_Statica_Dinamica.doc
4–1
RICHIAMI DI STATICA: ESEMPIO.
Con riferimento alla figura, due pulegge il cui peso è noto sono calettate sull’albero ad asse
verticale di peso noto G3.
Note le dimensioni e date le tensioni Qi (i=1, 2, 3) delle funi, si determinino le razioni vincolari nei
cuscinetti A e B e la forza esterna P, nell’ipotesi di assenza di attrito.
Dati Geometrici: a = 0.2m , b = 0.4m , r1 = 0.2m , r2 = 0.15m ;
Carichi noti: Q1 = 300N , Q2 = 75N , Q3 = 100N , G1 = 200N , G2 = 45N , G3 = 60N ;
L’equilibrio alla traslazione porge
(1) RAx - Q1 - Q2 + RBx = 0
(2) RAy - G1 - G2 - G3 = 0
(3) RAz + RBz - Q3 - P = 0
y
2r2
Q3
mentre da quello alla rotazione si ricava
P
(4) RBz ( a + b ) - (Q3 + P )( 2a + b ) = 0
(5) (Q2 - Q1 ) r1 + ( P - Q3 ) r2 = 0
G2
(6) (Q1 + Q2 ) a - RBx ( a + b ) = 0
a
RBx
RBz
G3
Q2
Le Eq. (5), (6) e (2) porgono rispettivamente
P = Q3 + (Q1 - Q2 )
RBx = (Q1 + Q2 )
r1
= 400N
r2
2r1
a
= 125N
a+b
G1
Q1
a
RAy = G1 + G2 + G3 = 305N
mentre le Eq. (1), (4) e (3) forniscono
RAy
b
RAx = Q1 + Q2 - Bx = ( Q1 + Q2 )
= 250N
a+b
O
RBz = (Q3 + P )
b
2a + b é
r ù 2a + b
= 2Q3 + (Q1 - Q2 ) 1 ú
= 667N
a + b êë
r2 û a + b
RAx
x
RAz
z
é
rù a
RAz = Q3 + P - Bz = - ê 2Q3 + (Q1 - Q2 ) 1 ú
= -167N
r2 û a + b
ë
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\04Richiami_Statica_Dinamica.doc
4–2
APPLICAZIONI DI ELEMENTI VOLVENTI
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\05Forze_Rendimento.doc
5–1
h = h1 h2 L hn
h=
h1Lm + h2 Lm + L + hn Lm
1
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\05Forze_Rendimento.doc
2
n
Lm
5–2
ANALISI STATICA DI UN ESCAVATORE
(senza attrito)
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
6–1
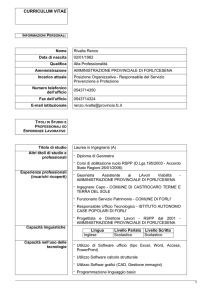
ANALISI STATICA GRAFICA DI UNA PIATTAFORMA DI SOLLEVAMENTO
(senza attrito)
In Figura è rappresentato lo schema di una piattaforma di sollevamento per autoveicoli. Si tratta di
un sistema articolato piano con otto membri e dieci coppie cinematiche di tipo C1 (sette coppie
rotoidali e tre prismatiche). Il meccanismo possiede un grado di libertà, come si evince facilmente
applicando la formula di Grübler ( 3 × 7 - 2 ×10 = 1 ).
L’attuazione è realizzata mediante un martinetto idraulico, costituito dai membri (5) e (6). Il fluido
in pressione, inviato nella camera inferiore del cilindro (6), agisce sul pistone collocato all’estremità
dello stelo (5), provocandone la fuoriuscita dal cilindro. A sua volta, lo stelo spinge sul membro (4)
attraverso la coppia in E, costringendolo a ruotare intorno all’asse della coppia D: ciò produce il
sollevamento della pedana (1).
Q
e
A
d
B
‚
•
„
ƒ
E
G
y
g
a
l
…
F
q
ˆ
D
†
f
‡
C
x
H
c
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
6–2
Analisi statica grafica
g
Q
e
•
f
R
ƒ
13
‚
•
ƒ
„
„
R
Q
R
h
21
31
‡
ìïQe = R21 ( e + f )
í
ïîQf = R31 ( e + f )
Þ
Q
R
R
= 21 = 31
e+ f
e
f
R
R
Þ
R13 R73
R
=
= 43
h
g
g +h
m
‚
R
24
‚
ƒ
R
„
ƒ
34
ˆ
R
„
…
F
24
ˆ
R
34
S
ìï R34 n = R24 m
í
ïî R34 ( n + m ) = Sm
Þ
R34 R24
S
=
=
m
n
n+m
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
73
13
ìï R13 g = R73h
í
ïî R13 ( g + h ) = R43h
n
R
43
S
R
84
F + S + R 84 = 0
6–3
ANALISI STATICA GRAFICA
DEL MECCANISMO PER L’AZIONAMENTO DI UNA PORTA INDUSTRIALE
(senza attrito)
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
6–4
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
6–5
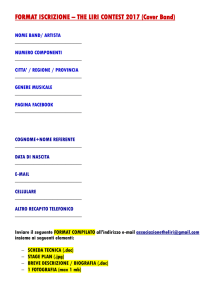
ANALISI STATICA DI UNA PRESSA DA BANCO
(senza attrito)
In Figura è rappresentato lo schema di una pressa da banco.
Si tratta di un sistema articolato piano con quattro membri e quattro coppie cinematiche di tipo C1
(tre coppie rotoidali e una prismatica). Il meccanismo possiede un grado di libertà, come si evince
facilmente applicando la formula di Grübler ( 3 × 3 - 2 × 4 = 1 ).
Occorre applicare una forza di serraggio nota Q mediante il membro (2). L’attuazione è realizzata
mediante una leva manuale (membro (3)) nel cui punto D l’operatore applica la forza incognita P.
Applicando il PLV risulta:
r r
r r
Q × v B + P × v D = -Q × v B + P × v D cosa = 0
P=
Q × vB
v D cosa
Q × vB
vD
Conviene pertanto applicare la forza P in direzione parallela alla velocità del punto D.
Pmin =
per cui, affinché la forza esercitata sia minima, deve risultare a=0:
La direzione della velocità del punto D può essere facilmente determinata individuando il centro di
istantanea rotazione assoluto C31 del membro (3). Si noti infatti che di due punti della leva, A e B,
sono note le direzioni della velocità: la velocità di A è ortogonale alla congiungente O con A,
mentre il punto B trasla in direzione verticale.
Una volta scelto di applicare la forza P nella direzione di VD, la forza può essere determinata tramite
analisi cinematica, al fine di valutare il rapporto di velocità tra VB e VD, o un’analisi statica (per via
grafica o analitica).
D
a
3
A
D
VD
VD
A
P
2
C31
O
P
2
C31
B
4
3
B
4
Q
1
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
O
Q
1
6–6
ANALISI STATICA GRAFICA DEL MANOVELLISMO
(senza attrito)
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
6–7
ANALISI STATICA GRAFICA DEL MANOVELLISMO
(con attrito)
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
6–8
ANALISI STATICA ANALITICA DI UN SISTEMA ARTICOLATO
(senza attrito)
Nel meccanismo rappresentato in figura, sullo spintore 1 agisce la forza resistente nota Q.
Si determini la coppia M da applicare al bilanciere 3.
Applicando il PLV risulta:
r r
r r
Q ´ vB + M ´ W1 = -Q × vB + M × W1 = 0
Q × vB
da cui: M =
W1
La coppia incognita può quindi essere determinata
tramite una analisi cinematica, in modo da
valutare il rapporto di velocità tra VB e W1.
Per l’analisi cinematica, si faccia riferimento alla
figura seguente. L’equazione di chiusura è:
®
®
®
®
r
OA+ AB+ BD + DO = 0
ìa cosj1 + b cos j 2 = s
ovvero: í
î a sin j1 + b sin j 2 = h
ì- W a sin j1 - W 2b sin j 2 = s&
Derivando si ottiene: í 1
î W1a cos j1 + W 2 b cos j 2 = 0
da cui risulta:
W2 = -
W1a cos j1
b cos j 2
s& = VB = -W1a(sin j1 - cosj1 tan j 2 )
L’analisi cinematica può essere condotta anche mediante
la ricerca dei centri di istantanea rotazione (vedi schema a
lato).
C:\users\rivola\Didattic\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
6–9
ANALISI STATICA GRAFICA DI UN MECCANISMO CAMMA-BILANCIERE
(con attrito)
In Figura è rappresentato lo schema di un meccanismo camma-bilanciere. Il meccanismo ha tre
membri e tre coppie cinematiche (due rotoidali ed una superiore) e, pertanto, possiede un grado di
libertà, come si evince facilmente applicando la formula di Grübler ( 3 × 2 - 2 × 2 - 1 = 1 ).
Al membro (2) (il bilanciere), dotato di moto orario, è applicata la forza resistente Q.
Occorre determinare il momento M da applicare al membro (1) (la camma) per assicurare
l’equilibrio. Si consideri noto l’angolo d’attrito cinetico j nella coppia superiore ed il raggio dei
circoli di attrito nelle due coppie rotoidali.
Per la soluzione occorre determinare i versi delle velocità assolute e relative dei membri.
Per farlo è utile ricorrere ai centri di istantanea rotazione. Ad esempio, una volta individuato C12 si
nota come questo sia interno ai due centri assoluti; pertanto le due velocità angolari W 2 e W1 hanno
verso opposto. La velocità angolare relativa W 21 avrà quindi lo stesso verso di W 2. E’, infatti:
r
r
r
W 21 = W 2 - W1
C:\users\rivola\Didattic\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
6 – 10
ANALISI STATICA GRAFICA DI UN SISTEMA ARTICOLATO
(con attrito)
Nel meccanismo rappresentato in figura, sullo spintore 1 agisce la forza resistente
nota Q. Noto l’angolo di attrito cinetico j e il raggio del circolo di attrito nelle coppie
rotoidali, si determini la coppia da applicare al bilanciere 3.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
6 – 10
PARTENZA DI UN AUTOVEICOLO
Si consideri un autoveicolo a trazione posteriore su una strada orizzontale.
Sia m la sua massa e h l’altezza sul suolo del suo baricentro. Note le distanze a e b
della forza peso dagli assi delle ruote e noto l’angolo di attrito di aderenza ja tra il
suolo e la ruota posteriore, si determini l’accelerazione massima che si può imprimere
al veicolo da fermo.
Nell’ipotesi di trascurare l’attrito volvente nei contatti ruota-strada e l’attrito nelle
coppie rotoidali delle ruota (in tal caso la reazione RA risulta verticale), si perviene
alla seguente:
&x&MAX = f a
a
g
p - fa h
dove: f a = tgj a
e
p = a+b
Nel caso in cui sia:
h = 0.2 p
a = b = p/2
se fa = 0.3
risulta:
&x&MAX = 1.6 m/s2
( t = 18 s )
se fa = 0.7
risulta:
&x&MAX = 4.0 m/s2
(t=7s)
dove t è il tempo necessario per raggiungere la velocità di 100 km/h pensando di
avanzare ad accelerazione costante.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
6 – 11
AUTOVEICOLO IN SALITA
Si consideri un autoveicolo a trazione posteriore che percorre una strada in salita con
al traino un tiro T.
Sia m la sua massa e h l’altezza sul suolo del gancio di traino. Noto l’angolo di attrito
di aderenza ja tra il suolo e la ruota posteriore, si determini il tiro massimo
applicabile al gancio di traino in condizioni limiti di aderenza supponendo il moto
uniforme.
SOLUZIONE
GRAFICA
Si osservi che se la
pendenza diventa troppo
elevata, il tiro massimo
assume verso concorde con
quello del moto, ovvero non
si può trainare nulla ed
occorre spingere il veicolo.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
6 – 12
AUTOVEICOLO IN DISCESA
Si consideri un autoveicolo a trazione posteriore che percorre una strada in discesa.
Nota la sua massa m si determini la coppia da applicare alle ruote posteriori in
condizioni di moto uniforme.
Verificare inoltre che, noto l’angolo di attrito di aderenza ja tra il suolo e le ruote
posteriori, non avvenga strisciamento tra queste ultime ed il terreno.
SOLUZIONE
GRAFICA
Si osservi che se la
discesa supera una
certa pendenza, alle
ruote posteriori è
necessario applicare
una coppia frenante.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\06Statica_Meccanismi.doc
6 – 13
TAGLIO di RUOTE DENTATE
alla macchina utensile per inviluppo
Taglio con utensile dentiera
Taglio con coltello Fellows
Taglio con utensile creatore
Taglio con utensile dentiera
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\07Ruote_Rotismi.doc
Taglio con coltello Fellows
7–1
DENTIERA NORMALIZZATA
p0 = pm0
=
=
linea di riferimento
=
h = 2.5 m0
=
SEGMENTO di AZIONE e ARCO di AZIONE
K2
N2
B2 C
B1
A2
A1
N1
K1
R1
Segmento di azione
CONDIZIONE DI CONTINUITA’
N1C + CN 2 = N1 N 2
Fattore di ricoprimento
Arco di azione
A1C + CB1 = A2C + CB2 = AB
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\07Ruote_Rotismi.doc
e=
AB
³1
p
7–2
Ruote dentate cilindriche a DENTI DRITTI
Ruote dentate cilindriche a DENTI ELICOIDALI
I fianchi dei denti della dentiera generatrice sono piani
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\07Ruote_Rotismi.doc
7–3
FORZE negli INGRANAGGI CILINDRICI a DENTI DRITTI
Ft =
M
R
FN =
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\07Ruote_Rotismi.doc
Ft
cos a
Fr = Ft tan a
7–4
FORZE negli INGRANAGGI CILINDRICI a DENTI ELICOIDALI
Ft =
M
R
Fn = Ft / cos b
Fa = Ft tan b
Fr = Ft tan a n / cos b
FN = Fn / cos a n
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\07Ruote_Rotismi.doc
7–5
Ruote dentate CONICHE
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\07Ruote_Rotismi.doc
7–6
INGRANAGGIO VITE SENZA FINE – RUOTA ELICOIDALE
i
t=
Z
i = n. di principi della vite
Z = n. di denti della ruota
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\07Ruote_Rotismi.doc
7–7
ROTISMI ORDINARI
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\07Ruote_Rotismi.doc
7–8
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\07Ruote_Rotismi.doc
7–9
ROTISMI EPICLOIDALI
WP
Z1
=
W1 Z1 + Z 3
W1
Z Z
= 1- 2 4
WP
Z1Z 3
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\07Ruote_Rotismi.doc
7 – 10
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\07Ruote_Rotismi.doc
7 – 11
DIFFERENZIALE PER AUTOVETTURA
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\07Ruote_Rotismi.doc
7 – 12
ORGANI FLESSIBILI
Catena ad anelli
Sezione di fune in acciaio
a 6 trefoli (42 fili) con anima tessile
Catena articolata
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\08Organi_Flessibili.doc
8–1
Esempi di macchine di sollevamento
Esempio di trasmissione con cinghia piatta
Esempio di trasmissione
con catena articolata
Esempio di trasmissione con cinghia dentata
Esempio di trasmissione tra assi sghembi con cinghia trapezoidale
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\08Organi_Flessibili.doc
8–2
TRASMISSIONE con CINGHIE PIATTE
Puleggia CONDOTTA (raggio R2)
Equilibrio di un elemento infinitesimo di cinghia
R 2 da
lunghezza
dell’elemento di
cinghia
T, T+dT forze agenti in
direzione normale al
piano trasversale
cinghia
f
coefficiente di attrito cinetico
p
reazione radiale della puleggia sulla cinghia (forza per unità di lunghezza)
f p reazione tangenziale della puleggia sulla cinghia (forza per unità di lunghezza)
q
massa per unità di lunghezza della cinghia
v
velocità (tangenziale) dell’elemento di cinghia
v = WR 2
v2
a=
a
accelerazione (centripeta) dell’elemento di cinghia
2
reazione TANGENZIALE
p R2 da
f p R2 d a
forza CENTRIFUGA
a q R2 da = q v 2 da
reazione RADIALE
a = W R2
R2
da
da
+ (T + dT ) sin
2
2
da
da
fp R2 da + T cos
= (T + dT ) cos
Equilibrio TANGENZIALE
2
2
p R2 + q v 2 = T
da
da d a
cos
sin
@1
@
f (T - q v 2 ) da = dT
fp R2 da = dT
2
2
2
Equilibrio RADIALE
f da =
dT
T - q v2
Condizioni al contorno per
la puleggia CONDOTTA
p R2 da + q v 2 da = T sin
f a + C ' = log(T - q v 2 )
a = 0 T = T2
a = a 2 T = T1
Ce fa = T - q v 2 (1)
(T1 - q v 2 ) = (T2 - q v 2 )e fa 2
Puleggia CONDOTTA
(T1 - q v 2 ) = (T2 - q v 2 ) e fa2
(2)
Puleggia MOTRICE
(T1 - q v 2 ) = (T2 - q v 2 ) e fa1
(3)
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\08Organi_Flessibili.doc
8–3
Osserviamo che:
T1 - q v2
= e fa 2 = e fa1
2
T2 - q v
a1 = a2
La (2) e la (3) sono valide entrambe SOLO SE le pulegge hanno lo stesso diametro.
Se i diametri delle pulegge sono diversi, vale solo una tra le (2) e la (3), quella
relativa alla puleggia minore.
Per l’altra puleggia (quella maggiore) deve valere:
(T1 - q v 2 ) = (T2 - q v 2 ) e f b
e deve aversi b = a
Se la puleggia maggiore è CONDOTTA
Se la puleggia maggiore è MOTRICE
b angolo della zona di strisciamento
nella puleggia maggiore
a angolo di avvolgimento della puleggia
minore
vale la (3)
vale la (2)
con a1 = b
con a 2 = b
e b = b2
e b = b1
Nel caso descritto, nella puleggia minore si ha slittamento su tutto l’arco di
avvolgimento. Un sovraccarico porterebbe ad uno slittamento globale che
deteriorerebbe rapidamente la cinghia. E’ pertanto opportuno mantenere un margine
di sicurezza, assicurando che:
b1 < a1
b2 < a2
(ovviamente è: b1 = b 2 = b )
Per ENTRAMBE le pulegge vale allora:
(T1 - q v 2 ) = (T2 - q v 2 ) e f b
(4)
TIRO nei RAMI di CINGHIA e TIRO di MONTAGGIO
M2
= T1 - T2 = (T1 - q v 2 ) - (T2 - q v 2 )
R2
M2
2
+
q
v
R2 (e f b - 1)
M2
f b
2
T1 =
e
+
q
v
R2 (e f b - 1)
T2 =
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\08Organi_Flessibili.doc
M2
= (T2 - q v 2 ) e f b - (T2 - q v 2 )
R2
M2
(T - q v 2 )
= (T1 - q v 2 ) - 1 f b
R2
e
T1 + T2
M2
e f b +1
T0 =
=
+ q v2
f b
2
R2 (e -1) 2
8–4
PARANCHI
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\08Organi_Flessibili.doc
8–5
FRENO A NASTRO (ORDINARIO)
FRENO A NASTRO DIFFERENZIALE
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\08Organi_Flessibili.doc
8–6
FRENI A CEPPI
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\09Freni_Frizioni.doc
9–1
FRENI A DISCO
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\09Freni_Frizioni.doc
9–2
INNESTI A FRIZIONE
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\09Freni_Frizioni.doc
9–3
ESEMPIO DI COMPENSAZIONE DELLE FORZE DI INERZIA ALTERNE
CON MASSE CONTROROTANTI
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\10Macchina_Alternativa.doc
10 – 1
ALBERO A GOMITO DI UNA MACCHINA ALTERNATIVA A
QUATTRO CILINDRI IN LINEA
4
4
1
1
3
2
2
3
FORZE DI INERZIA ROTANTI (Fr) E FORZE ALTERNE DEL I ORDINE (FaI)
La risultante 1+2+3+4 è nulla.
Le risultanti 1+4 e 2+3 sono complanari quindi è nullo anche il momento risultante.
4
1
1
23
4
3
2
FORZE DI INERZIA ALTERNE DEL II ORDINE (FaII)
La risultante 1+2+3+4 non è nulla.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\10Macchina_Alternativa.doc
10 – 2
ALBERO A GOMITO DI UNA MACCHINA A SEI CILINDRI IN LINEA:
PRIMA DISPOSIZIONE
1
6
4
6
5
4
3
2
5
3,4
3
1
1,2
2
5,6
FORZE DI INERZIA ROTANTI (Fr) E FORZE ALTERNE DEL I ORDINE (FaI)
La risultante 1+2+3+4+5+6 è nulla.
I momenti delle coppie di forze (1, 2), (3, 4) e (5, 6) hanno risultante nulla.
6
2
4
3
1
1
5
3
4
5
6
2
FORZE DI INERZIA ALTERNE DEL II ORDINE (FaII)
La risultante 1+2+3+4+5+6 è nulla.
Le risultanti 1+2, 3+4 e 5+6 non sono complanari e quindi il momento risultante non è nullo.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\10Macchina_Alternativa.doc
10 – 3
ALBERO A GOMITO DI UNA MACCHINA A SEI CILINDRI IN LINEA:
SECONDA DISPOSIZIONE
6
6
5
1
4
2
3
3
1
5
4
2
FORZE DI INERZIA ROTANTI (Fr) E FORZE ALTERNE DEL I ORDINE (FaI)
La risultante 1+2+3+4+5+6 è nulla.
Le risultanti 1+6, 2+5 e 3+4 sono complanari quindi è nullo anche il momento risultante.
6
6
5
1
4
3
1
2
2
3
5
4
FORZE DI INERZIA ALTERNE DEL II ORDINE (FaII)
La risultante 1+2+3+4+5+6 è nulla.
Le risultanti 1+6, 2+5 e 3+4 sono complanari quindi è nullo anche il momento risultante.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\10Macchina_Alternativa.doc
10 – 4
IMPIANTO DI SOLLEVAMENTO CARICHI
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\11Dinamica_Impianti.doc
11 – 1
RIGIDEZZA DI MOLLE IN SERIE E IN PARALLELO
ESEMPI DI CALCOLO DELLA RIGIDEZZA
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\12Vibrazioni.doc
12 – 1
ESERCIZIO 1
Un compressore centrifugo di massa complessiva m = 40 kg, ruota a n = 1500 rpm e presenta uno
squilibrio statico s = 200 kg mm. Si supponga di collegarlo al suolo con una sospensione
schematizzabile con una molla ed uno smorzatore viscoso. Noto il fattore di smorzamento z = 0.15,
si determini quale deve essere la costante elastica k della molla affinché la trasmissibilità della
sospensione abbia il valore 0.08.
Calcolare inoltre l’ampiezza della forza trasmessa al suolo.
ESERCIZIO 2
In un aeroplano per ridurre le vibrazioni trasmesse agli strumenti di bordo, questi sono stati
collegati al telaio dell’aereo mediante sospensioni aventi smorzamento trascurabile. Se tali
sospensioni si accorciano di una quantità d = 2.6 mm sotto il peso Q = 180 N degli strumenti,
trovare il rapporto tra l’ampiezza delle vibrazioni degli strumenti e l’ampiezza delle vibrazioni del
telaio dell’aereo nel caso in cui sia f = 30 Hz la frequenza di queste ultime.
Si calcoli inoltre la costante elastica equivalente della sospensione.
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\12Vibrazioni.doc
12 – 2
ESERCIZIO 3
Una macchina di massa complessiva m = 450 kg, con un rotore avente uno squilibrio statico s = 0.2
kg m, funziona a regime alla velocità n = 1200 rpm. La macchina è montata su una sospensione che
ha freccia statica d = 5 mm e fattore di smorzamento z = 0.1. Calcolare la rigidezza k della
sospensione, l’ampiezza T0 della forza trasmessa al suolo e l’ampiezza X0 delle oscillazioni della
macchina alla velocità di regime.
Volendo ridurre l’ampiezza delle oscillazioni al valore X0’ = 0.1 mm, lasciando inalterata
l’ampiezza T0 della forza trasmessa al suolo, si monta la macchina su un blocco di calcestruzzo e si
modifica la sospensione. Si calcoli la massa M del blocco e la nuova rigidezza k' della sospensione,
ipotizzando che il fattore di smorzamento resti inalterato.
w=
Nel primo modo di installazione (fig. 1) risulta:
2pn
60
T0 = sw 2
X =
s w2
m w n2
1
(1)
= 0.506 10 -3 m
2
g
k = mw n
d
2
Confrontando la (2) e la (4)
2
æ
w ö
÷÷
1 + çç 2z
w
n ø
è
= 514 N
2 2
2
æ æw ö ö æ
ç1 - ç ÷ ÷ + ç 2z w ö÷
ç çè w n ÷ø ÷ çè w n ÷ø
è
ø
wn =
2
æ æ w ö2 ö æ
ç1 - ç ÷ ÷ + ç 2z w ö÷
ç çè w n ÷ø ÷ çè w n ÷ø
è
ø
risulta:
X'
m
=
X m+M
(2)
da cui si ricava:
Aggiungendo il blocco di calcestruzzo e modificando la
sospensione (fig. 2), l’ampiezza T0 deve restare inalterata e
quindi, per la (1), wn non può essere modificato:
w n2 =
k
k'
=
m m+M
æX
ö
M = mç - 1÷ = 1286 kg
è X' ø
(3)
Infine, dalla (3) si ricava:
inoltre l'ampiezza dell'oscillazione deve ridursi al valore:
X'=
s w2
( m + M ) w n2
1
æ æw
ç1 - ç
ç çè w n
è
ö
÷÷
ø
2
2
2
ö æ
÷ + ç 2z w ö÷
÷ çè w n ÷ø
ø
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\12Vibrazioni.doc
(4)
k' = k
X
kN
= 4466
X'
m
12 – 3
ESERCIZIO 4
Si consideri il veicolo elementare schematizzato in figura che si muove con velocità v = 100 km/h
su una strada ondulata il cui andamento è ben rappresentato da una funzione sinusoidale avente
lunghezza d’onda l = 4 m ed ampiezza Y.
La massa del veicolo a pieno carico è mP = 1200 kg, mentre a vuoto è mV = 400 kg.
La costante elastica della sospensione vale k = 400 kN/m ed il fattore di smorzamento a pieno
carico vale zP = 0.4.
Determinare il rapporto tra l’ampiezza delle oscillazioni del veicolo e l’ampiezza delle oscillazioni
del suolo, sia a pieno carico che a vuoto.
Il legame tra la lunghezza d’onda e la pulsazione dell’eccitazione è:
Per cui risulta:
2p
w =v
l
= 43
z =
Il fattore di smorzamento vale:
l =v
2p
w
rad
s
c
2 km
da cui:
c = 2z km
La costante di smorzamento c resta ovviamente inalterata, pertanto deve essere:
c = 2z P kmP = 2z V kmV
da cui si ricava:
zV = z P
mP
= 0.693
mV
Il rapporto tra le ampiezze di vibrazione e dell’eccitazione vale:
t=
æ
w ö
÷÷
1 + çç 2z
è wn ø
X
=
Y
æ æw
ç1 - ç
ç çè w n
è
ö
÷÷
ø
2
2
2
2
ö æ
ö
w
÷ + ç 2z
÷
÷ çè w n ÷ø
ø
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\12Vibrazioni.doc
12 – 4
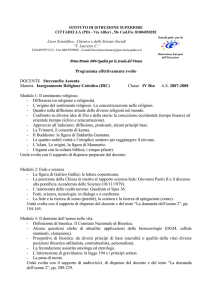
I risultati sono riepilogati in tabella e rappresentati nel grafico seguente.
m
wn
(w/wn)2
z
t=X/Y
VUOTO
400 kg
31.6 rad/s
PIENO CARICO
1200 kg
18.3 rad/s
1.90
5.66
0.693
0.4
1.02
0.43
In figura è riportato l’andamento del rapporto tra le ampiezze nelle due condizione, a pieno carico
(linea rossa) e a vuoto (linea blu), in funzione del rapporto tra pulsazione dell’eccitazione e
pulsazione propria del sistema. I due cerchietti evidenziano le due condizioni di funzionamento.
2
c aric o
vuoto
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
1
2
D:\rivola\DIDATTIC\FORLI\MaM\Dispense\12Vibrazioni.doc
3
4
5
6
12 – 5
7
AZIONI D’INERZIA SU UN CORPO RIGIDO
Y
X
O
Y’
G
Z
O’
X’
Z’
La risultante delle forze d’inerzia è uguale e opposta alla derivata rispetto al tempo della quantità di
moto del corpo:
dQ
Fi = −
dt
Dalle definizioni di baricentro e quantità di moto si ricava:
dQ
dv
Fi = −
= − m G = − maG
dt
dt
Sia ω la velocità angolare del corpo rispetto ad un riferimento inerziale e sia O un punto
appartenente al corpo, origine di una terna di riferimento (x, y, z) solidale con il corpo.
Assumiamo che O coincida con un punto fisso (qualora esista) ovvero con il baricentro. Il momento
della quantità di moto del corpo rispetto al punto O risulta espresso dalla:
K O = J Oω
dove la matrice simmetrica
⎡ Jx
⎢
J O = ⎢− J xy
⎢ − J xz
⎣
− J xy
Jy
− J yz
− J xz ⎤
⎥
− J yz ⎥
J z ⎥⎦
è detta tensore di inerzia.
Il momento risultante delle forze d’inerzia rispetto a un punto O (fisso o baricentrico) è uguale ed
opposto alla derivata rispetto al tempo del momento della quantità di moto:
dK O
M i ,O = −
dt
Si dimostra che vale la seguente:
dK O
~J ω
+ω
= JOω
O
dt
⎡ 0
~
~
dove ω è la matrice antisimmetrica: ω = ⎢⎢ ω z
⎢− ω y
⎣
Pertanto si ha:
~J ω
−ω
M i ,O = − J O ω
O
C:\users\rivola\Didattic\FORLI\MaM\Dispense\13Dinamica_Rotori.doc
− ωz
0
ωx
ωy ⎤
⎥
− ωx ⎥
0 ⎥⎦
13 – 1
Supponiamo il caso di corpo rigido rotante attorno ad un asse fisso.
Sia questo l’asse z della terna solidale con il corpo.
X
Z=Z’
O
Y
Fi = −ma G
La risultante delle forze d’inerzia vale:
Per quanto riguarda il momento risultante delle forze d’inerzia, essendo:
ω = {0 0 ω z }
T
M i ,O
M i ,O
⎡0
~
ω = ⎢⎢ω z
⎢⎣ 0
− ωz
0
0
0⎤
0⎥⎥
0⎥⎦
risulta:
⎡ Jx
− J xy − J xz ⎤ ⎧ 0 ⎫ ⎡ 0
⎢
⎥⎪ ⎪
~J ω = − − J
−ω
= −J O ω
− J yz ⎥ ⎨ 0 ⎬ − ⎢⎢ω z
Jy
O
⎢ xy
⎢ − J xz − J yz
J z ⎥⎦ ⎪⎩ω z ⎪⎭ ⎢⎣ 0
⎣
J yz ⎤ ⎧ 0 ⎫
⎧− J xz ⎫
⎡ J xy − J y
⎪
⎪
⎪ ⎪
⎢
= − ⎨− J yz ⎬ω z − ω z ⎢ J x − J xy − J xz ⎥⎥ ⎨ 0 ⎬
⎪ J ⎪
⎢⎣ 0
0
0 ⎥⎦ ⎪⎩ω z ⎪⎭
⎩ z ⎭
In definitiva:
M i ,O
−ωz
0
0
0⎤ ⎡ J x
⎢
0⎥⎥ ⎢− J xy
0⎥⎦ ⎢⎣ − J xz
− J xy
Jy
− J yz
− J xz ⎤ ⎧ 0 ⎫
⎥⎪ ⎪
− J yz ⎥ ⎨ 0 ⎬
J z ⎥⎦ ⎪⎩ω z ⎪⎭
⎧− J yz ⎫
⎧ J xz ⎫
⎪
⎪
⎪
⎪ 2
= ⎨ J yz ⎬ω z + ⎨ J xz ⎬ω z
⎪− J ⎪
⎪ 0 ⎪
⎩ z⎭
⎩
⎭
C:\users\rivola\Didattic\FORLI\MaM\Dispense\13Dinamica_Rotori.doc
13 – 2
Se l’asse z (fisso) è baricentrico (ma non è principale d’inerzia)
Fi = 0
M i ,G
⎧− J yz ⎫
⎧ J xz ⎫
⎪ 2
⎪
⎪
⎪
= ⎨ J yz ⎬ω z + ⎨ J xz ⎬ω z
⎪ 0 ⎪
⎪− J ⎪
⎭
⎩
⎩ z⎭
Se l’asse z (fisso) è baricentrico e principale d’inerzia (asse centrale di inerzia)
Fi = 0
M i ,G
⎧0⎫
⎧ 0 ⎫
⎪ ⎪ 2
⎪
⎪
= ⎨ 0 ⎬ω z + ⎨0⎬ω z
⎪0⎪
⎪− J ⎪
⎩ ⎭
⎩ z⎭
Se l’asse z (fisso) è principale d’inerzia (ma non è baricentrico)
X
O=G
Fi = −maG
Z
Z’
M i ,G
Y
⎧0⎫
⎧ 0 ⎫
⎪ ⎪ 2
⎪
⎪
= ⎨ 0 ⎬ω z + ⎨0⎬ω z
⎪0⎪
⎪− J ⎪
⎩ ⎭
⎩ z⎭
Nel caso in cui la velocità angolare sia costante, si ha:
⎧− J yz ⎫
⎪
⎪ 2
2
Fi = − m ωz GO
M i ,O = + ⎨ J xz ⎬ω z
⎪ 0 ⎪
⎩
⎭
In tal caso, se l’asse è principale d’inerzia ma non è baricentrico, si ha:
SQUILIBRIO STATICO
Fi = − m ωz2 GO
M i ,O = 0
Se, al contrario, l’asse è baricentrico ma non è principale d’inerzia, risulta:
⎧− J yz ⎫
⎪
⎪ 2
SQUILIBRIO DINAMICO
Fi = 0
M i ,O = + ⎨ J xz ⎬ω z
⎪ 0 ⎪
⎩
⎭
Azioni su due supporti dovute allo squilibrio STATICO e DINAMICO di un rotore.
C:\users\rivola\Didattic\FORLI\MaM\Dispense\13Dinamica_Rotori.doc
13 – 3