Elettrodinamica classica I
Normalisti del secondo anno vari ed eventuali
13 luglio 2010
2
Introduzione
Questi sono gli appunti del corso tenuto dal prof. Giuseppe La Rocca (coadiuvato dal dott. Franco Ligabue) ai matematici e fisici normalisti del secondo
anno, durante l’anno accademico 2009-2010. Non offriamo alcuna garanzia in
merito alla loro qualità o attendibilità, anche perché ancora li stiamo ancora
scrivendo.
Questa introduzione, in particolare, è manifestamente brutta ed insignificante. Sarà riscritta non appena avremo tempo e voglia di farlo. Non
trattenete il fiato.
Programma del corso
1. Equazioni statiche di Maxwell.
2. Metodi di soluzione del problema dell’elettrostatica.
3. Equazioni dinamiche di Maxwell.
4. Onde elettromagnetiche.
5. Irraggiamento.
6. Diffusione della radiazione.
3
4
Capitolo 1
Prima lezione (Giuseppe La
Rocca, 08/10/2009)
1.1
1.1.1
Il campo elettrico
Legge di Coulomb
Date due particelle ferme di cariche q1 , q2 e posizioni r~1 , r~2 , la forza di
interazione tra esse è descritta dalla Legge di Coulomb:
F~2,1 = k
q1 q2
(~
r1 − r~2 )
|~
r1 − r~2 |3
La costante k dipende dal sistema di unità di misura usato; per questo corso
si è scelto di utilizzare il sistema cgs. Poniamo quindi k = 11 . Misuriamo
la carica in u.e.s. (unità elettrostatiche). Dalla legge di Coulomb u.e.s. =
1
1
3
dyn 2 · cm2 = g 2 · cm 2 · s−1 . La carica dell’elettrone vale, in modulo, |e| =
4.8 · 10−10 ues = 1.6 · 10−19 C.
Per la forza elettrica vale il principio di sovrapposizione lineare: se
una carica q, la cui posizione è ~r interagisce con n cariche qi , r~i , la forza
totale agente su q è
F~ =
n
X
i=1
n
X
qqi
qi
r − r~i ) = q
r − r~i )
3 (~
3 (~
|~r − r~i |
|~
r
−
r
~
|
i
i=1
Possiamo definire il campo elettrico generato da una distribuzione di
1
Si noti che, in questo sistema, k è una grandezza adimensionale. Le unità di misura
elettromagnetiche sono quindi tutte grandezze derivate, a differenza di quanto avviene in
altri sistemi.
5
6CAPITOLO 1. PRIMA LEZIONE (GIUSEPPE LA ROCCA, 08/10/2009)
carica
n
X
qi
F~
~
=
r − r~i )
E(~r) =
3 (~
q
|~
r
−
r
~
|
i
i=1
che è un campo vettoriale. Possiamo generalizzare la definizione per distribuzioni continue di carica. Data una distribuzione ρ(~r),
~ r) =
E(~
Z
d~s
ρ(~s)
(~r − ~s)
|~r − ~s|3
Tramite il concetto di campo, non consideriamo più le interazioni dirette
carica-carica, ma le interazioni di ciascuna carica con il campo.
1.1.2
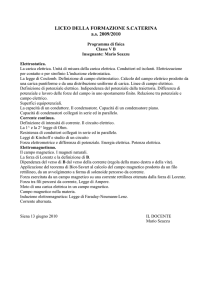
Campo elettrico generato da un filo infinito uniformemente carico
Calcoliamo il campo elettrico generato da un filo rettilineo infinito, uniformemente carico con densità di carica λ in tutto lo spazio. Fissiamo un sistema
di assi cartesiani in cui l’asse z coincide con il filo. Con alcune considerazioni
di simmetria è possibile ricavare informazioni sul campo elettrico: il sistema
è invariante per traslazioni lungo z, perciò il campo sull’asse è nullo ed il
campo non dipende da z; per l’invarianza per rotazioni attorno all’asse z,
il campo elettrico ha simmetria cilindrica; dalla simmetria per rotazioni di
180◦ attorno a qualunque asse perpendicolare all’asse z ricaviamo che il campo elettrico è diretto perpendicolarmente all’asse z. Sappiamo quindi che il
campo elettrico è diretto perpendicolarmente al filo e il suo modulo dipende
solo dalla distanza da esso. Calcoliamo il campo in un punto a distanza l dal
filo (fissiamo z = 0 alla quota di questo punto).
Figura 1.1: Filo rettilineo uniformemente carico
1.1. IL CAMPO ELETTRICO
7
Il contributo al campo elettrico di un elemento infinitesimo del filo posto
a quota z è
λdz
l
dE = 2
·√
2
z +l
z 2 + l2
Effettuando il cambio di variabile θ = arctan zl , il campo elettrico è dato
dall’integrale
Z π
2 λ
λ
~
cos θdθ = 2
E(l) =
π l
l
−2
~
per l 6= 0, abbiamo già mostrato che E(0)
= 0 Notiamo che in realtà il
calcolo dell’integrale è necessario unicamente per determinare che il campo è
ben definito nel punto (l’integrale converge) e per ricavare il fattore numerico
~ ∝ λ.
2; infatti dall’analisi dimensionale si poteva ricavare, senza calcoli, che E
l
1.1.3
Campo elettrico generato da un piano uniformemente carico
In analogia con l’esercizio precedente, vogliamo calcolare il campo elettrico
generato nello spazio da un piano uniformemente carico con densità di carica σ. Fissiamo un sistema di assi cartesiani con gli assi x e y nel piano.
Per simmetria traslazionale il campo sul piano è nullo e in un punto generico non dipende da x e y, per simmetria di rotazione attorno a z il campo
ha unicamente componente ortogonale al piano. σ ha le dimensioni di un
campo elettrico (carica/lunghezza), quindi ci aspettiamo che, se il campo
è ben definito, sia direttamente proporzionale alla densità di carica, essendo l’unica altra misura in gioco una lunghezza (z). Per calcolare il campo
elettrico, suddividiamo il piano in anelli di spessore infinitesimo concentrici e posti in modo tale che il punto in cui stiamo calcolando il campo sia
sull’asse di ciascun anello. Calcoliamo innanzi tutto il campo elettrico prodotto da un anello uniformemente carico, con densità lineare di carica λ e di
raggio R su un punto a distanza x dal suo asse; per simmetria rotazionale
esso è diretto lungo l’asse. Detto dϕ l’angolo infinitesimo al centro dell’anello, Rλdϕ è la carica infinitesima, x2 + R2 il quadrato della distanza di
ogni punto dell’anello dal punto in cui calcoliamo il campo, moltiplichiamo per √x2x+R2 per tenere conto solo della componente lungo x del contributo al Z
campo, in quanto le altre si annullano per simmetria. Si ha quindi
2π
Rλdϕ
x
x
~
√
E(x)
=
= 2πRλ
3 .
2
2
x + R x2 + R 2
(x2 + R2 ) 2
0
Possiamo ora risolvere il problema iniziale: integrando sui contributi degli
anelli infinitesimi in cui abbiamo suddiviso il piano, otteniamo l’espressione
8CAPITOLO 1. PRIMA LEZIONE (GIUSEPPE LA ROCCA, 08/10/2009)
~
E(z)
=
Z
+∞
z
2πRσdR
(z 2
0
3
+ R2 ) 2
, che tramite il cambio di variabile θ =
arctan Rz diventa
~
E(z)
=
Z
π
2
2π tan(θ)zσ
0
~
E(z)
= 2πσ
Z
z
z
2
3
cos(θ) z (1 + tan(θ)2 )3
π
2
sin(θ)dθ = 2πσ
0
Come previsto, il risultato è direttamente proporzionale a σ e non dipende
da altre grandezze del sistema.
1.2
Flusso di un campo vettoriale. Legge di
Gauss.
1.2.1
Definizione del flusso di un campo vettoriale attraverso una superficie.
Il flusso di un campo vettoriale attraverso una superficie é una proprietá matematica del campo stesso, e la definizione seguente é valida per ogni campo
vettoriale ~v e ogni superficie S dotati di sufficiente regolaritá (in particolare,
immagineremo sempre di considerare campi vettoriali ~v che siano funzioni
continue dello spazio, e superfici S prive di punte).
Supponiamo di dividere la superficie S con una griglia, in modo da ridurla
ad una grande quantitá di superfici dS che possiamo considerare piane. Per
una piccola superficie dS, definiamo il versore n̂ come il vettore unitario
perpendicolare al piano di dS; si puó stabilire arbitrariamente il verso di
n̂, purché la scelta sia la stessa per ogni elemento di superficie dS, cioé
purché, spostandoci di un piccolo tratto sulla superficie, il versore n̂ rimanga
sostanzialmente lo stesso, senza cambiare verso. Definiamo il flusso attraverso
l’elemento di superficie dS come il prodotto scalare:
dΦ(~v ) = ~v · n̂dS
(1.1)
Il flusso del campo vettoriale ~v su tutta la superficie S é dato dall’integrale:
Z
ΦS (~v ) = (~v · n̂)dS
(1.2)
S
1.2. FLUSSO DI UN CAMPO VETTORIALE. LEGGE DI GAUSS.
9
Equivalentemente, é possibile considerare la quantitá n̂dS come un vettore avente modulo dS e diretto perpendicolarmente all’elemento di superficie;
~ = n̂dS, il flusso puó anche essere espresso in questo
perció, ponendo dS
modo:
Z
ΦS (~v ) =
~
~v · dS
(1.3)
S
Un caso particolare é quello del flusso attraverso una superficie chiusa.
In questo caso, la definizione precedente é ancora valida, ma per convenzione
si stabilisce sempre di orientare n̂ in modo che sia uscente dalla superficie
chiusa. Inoltre, per indicare che l’integrale é esteso a tutta la superficie
chiusa, si pone un cerchietto nel simbolo di integrale:
I
ΦS (~v ) =
~
~v · dS
(1.4)
S
1.2.2
Proprietá matematiche del flusso attraverso una
superficie.
Una proprietá matematica del flusso é l’evidente linearitá rispetto al campo
vettoriale ~v , che si dimostra in modo immediato notando che sia il prodotto
scalare che l’integrale sono lineari.
Una seconda proprietá matematica riguarda il flusso attraverso le superfici
chiuse. Sia S una superficie chiusa, e supponiamo di dividere il contenuto
di S in due parti, ottenendo due superfici chiuse S1 e S2 . É chiaro che il
flusso attraverso S é uguale alla somma dei flussi attraverso S1 ed S2 , perchè
il contributo dovuto alla superficie in comune a S1 e S2 assume segno diverso
in ΦS1 ed in ΦS2 .
É possibile ripetere il procedimento dividendo il contenuto di S in un
numero qualsiasi di parti, e si avrá sempre:
10CAPITOLO 1. PRIMA LEZIONE (GIUSEPPE LA ROCCA, 08/10/2009)
ΦS (~v ) =
n
X
ΦSi (~v )
(1.5)
i=1
1.2.3
Legge di Gauss
La legge di Gauss é la prima relazione fondamentale dell’elettrostatica. Afferma che, se S é una superficie chiusa, Qint é la carica totale all’interno della
~ é il campo elettrostatico nello spazio, vale la relazione:
superficie ed E
~ = 4πQint
ΦS (E)
(1.6)
É facile verificare la legge nel caso di una carica puntiforme al centro di
una superficie sferica. Si procede trattando il caso generale. Supponiamo che
una carica puntiforme q si trovi all’interno di una superficie chiusa, come in
figura.
Consideriamo un piccolo angolo solido ∆Ω che parte dalla carica, e valutiamo il flusso del campo elettrico dovuto alla carica nella porzione della
superficie ∆S intercettata da ∆Ω (per il momento, supponiamo che la superficie si intersechi una sola volta con tale angolo solido). Se n̂ é il versore
uscente da tale elemento di superficie, il flusso é:
~ · n̂∆S = Q r̂ · (n̂∆S) = Q ∆Sn
(1.7)
∆Φ = E
r2
r2
Dove si é indicata con ∆Sn la proiezione di S sulla superficie della sfera centrata nella carica q e avente raggio r. Si ha quindi ∆Sn = r2 ∆Ω e
integrando su tutto l’angolo solido si ottiene Φ = 4πq. Per concludere la
dimostrazione, é sufficiente fare le seguenti osservazioni:
1. Se la superficie interseca piú volte l’angolo solido ∆Ω e la carica q é
all’interno, é evidente che la superficie interseca un numero dispari di
1.2. FLUSSO DI UN CAMPO VETTORIALE. LEGGE DI GAUSS.
11
volte l’angolo solido, ed i contributi al flusso si annullano a coppie finché
non rimane un solo contributo pari a 4πq.
2. Se la carica é all’esterno della superficie, le linee di forza del campo
elettrico intersecano la superficie un numero pari di volte, e si puó
ripetere l’argomento precedente per mostrare che il flusso dovuto alla
carica é nullo.
3. Se nella superficie si trova piú di una carica, il teorema rimane valido
per il principio di sovrapposizione lineare, che é valido per il campo
elettrico, e per la proprietá di linearitá del flusso.
12CAPITOLO 1. PRIMA LEZIONE (GIUSEPPE LA ROCCA, 08/10/2009)
Capitolo 2
Seconda lezione (Giuseppe La
Rocca, 12/10/2009)
2.1
Forma locale della legge di Gauss
La legge di Gauss puó essere riscritta trasformandola in una legge locale.
Sia data una regione di spazio con un generico campo ~v (x, y, z). Consideriamo una superficie chiusa. Questa puó essere sezionata con dei cubetti di
dimensioni infinitesime. Consideriamo uno di questi cubetti elementari.
Figura 2.1: default
Il flusso attraverso la faccia 1 sará
∆Φ1 = −∆y∆xvx (x, y, z)
dove si é considerato irrilevante il punto che si sceglie nella faccica per valutare
il vettore vx . Analogamente il flusso atrraverso la faccia 2 sará
∆Φ2 = ∆y∆xvx (x + ∆x, y, z)
13
14CAPITOLO 2. SECONDA LEZIONE (GIUSEPPE LA ROCCA, 12/10/2009)
Combinando queste due equazioni si ha che il flusso attreverso le facce uno
e due é:
∆Φ = ∆Φ2 + ∆Φ1 = ∆x∆y[vx (x + ∆x, y, z) − vx (x, y, z)]
. Per definizione di derivata parziale:
vx (x + ∆x, y, z) − vx (x, y, z)
∂vx
=
∆x→0
∆x
∂x
lim
Possiamo approssimare:
∆Φ ' ∆x∆y∆z
∂vx
∂x
Nelle altre facce, prese a due a due opposte, il clacolo é analogo. Per il flusso
totale attraverso il cubetto otteniamo:
∆Φtot = (
∂vx ∂vy ∂vz
+
+
)∆x∆y∆z
∂x
∂y
∂z
~ · ~v la scrittura:
Indichiamo con div~v o con 5
∂vx ∂vy ∂vz
+
+
∂x
∂y
∂z
Usando questa notazione si ottiene:
~ · ~v dV
∆Φ = 5
Notiamo che sommando il contributo al flusso di ogni cubetto si ottiene il
flusso totale attraverso la superficie chiusa. Infatti per due cubetti contigui
i flussi attraverso la faccia che hanno in comune hanno ugual modulo, ma
segno opposto. La somma di tali flussi é dunque nulla. In ultima analisi il
risultato della sommatoria é la somma dei flussi attraverso quelle facce che
danno verso l’esterno della superficie.
X
X
Φ=
∆Φ =
div~v ∆V
Quando ∆V → 0 si ha:
Z
Z
div~v dV =
Vs
~
~v · dS
s
In questo passaggio abbiamo ovviamente supposto proprietá di regolaritá del
campo vettoriale.
I
Z
~
~
E · dS = 4πQint =
4πρdV
VS
2.1. FORMA LOCALE DELLA LEGGE DI GAUSS
Ma per quanto detto precedentemente
I
Z
~ · dS
~=
E
15
~
div EdV
VS
A parte le ipotesi di regolaritá non cé nessuna restrizione né nella legge di
Gauss né nel teorema della divergenza che richieda una superficie particolare.
Dunque si puó applicare questo risultato ad un volume infinitesimo:
~ r) = 4πρ~r
div E(~
Questa é la forma locale della legge di Gauss. Si dice legge locale in quanto
~ non é conosciuto in un punto, ma in un intorno di quel punto, per poter
E
calcolare le derivate.
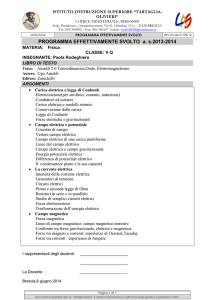
2.1.1
Esempio di uso della forma locale della legge di
Gauss
Figura 2.2: Esempio di uso della forma locale della legge di Gauss
Sia dato in un riferimento (x, y, z) una distribuzione uniforme di carica (densitá ρ0 ) compresa tra -a e a sull’asse y. Per ragioni di simmetria
16CAPITOLO 2. SECONDA LEZIONE (GIUSEPPE LA ROCCA, 12/10/2009)
~
E(x,
y, z) = E(y)ŷ. Notiamo che la distribuzione é simmetrica rispetto al piano (x,z). Questo implica che E(y) é una funzione dispari (E(−y) = −E(y)).
La densitá di carica nello spazio é descritta da:
ρ0 −a < y < a
ρ(y) =
0 y < −a, y > a
dEy
∂Ey
=
= 4πρ(y)
∂y
dy
Z
Ey = 4πρ(y) + c
Per la disparitá di E basta risolvere il problema per y ≥ 0
• Per 0 ≤ y < a: Ey = 4πρ0 y la costante di integrazione deve essere 0
altrimenti per la disparitá della funzione ci sarebbe una discontinuitá
per y=0.
• Per y ≥ a: Ey = A = 4πρ0 a in quanto vogliamo raccordare le soluzioni
per y=a.
In entrambi i casi abbiamo escluso a priori casi in cui si hanno discontinuitá
del campo elettrico questo trova giustificazione:
• FISICA: non c’é nessuna singolaritá dunque la funzione dovrebbe essere
continua.
• MATEMATICA:se ci fosse un salto, derivata destra o sinistra divergerebbero.
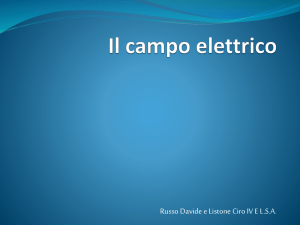
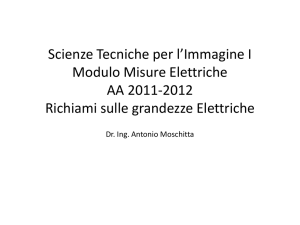
Vorremo ora studiare il limite per a che tende a zero del campo elettrico e
confrontare il risultato con il campo elettrico prodotto da un piano uniformemente carico. Notiamo peró che mandando semplicemente a 0 a anche la
carica si annulla e il campo tende anch’esso a 0. Per modellizzare il piano
infinito uniformemente carico occorre mantenere costante la quantitá ρa. I
grafici del campo in funzione della posizione per 2 diversi valori di a sono:
2.2
Potenziale elettrico
Il lavoro compiuto dal campo elettrico su una carica q che si sposta dal punto
a al punto b lungo la curva γ è
Z
~
~ · dl.
La→b = q
E
γa→b
2.2. POTENZIALE ELETTRICO
Figura 2.3: a → 0, ρ é costante
Figura 2.4: a → 0, ρa é costante
17
18CAPITOLO 2. SECONDA LEZIONE (GIUSEPPE LA ROCCA, 12/10/2009)
Dimostriamo la conservatività del campo elettrostatico. Sia Q0 la sorgente
del campo.
Z
Z
Z rb
dr
1
eˆr ~
1
~
~
Q0 2 = Q0 ( − ),
E(~r) · dl = Q0 2 · dl =
r
r
ra rb
ra
γa→b
γ
da cui la conservatività in quanto il risultato è indipendente dalla particolare
curva γ.
Per la linearità del campo elettrico ogni campo elettrostaticoù generato
da una distribuzione di cariche è conservativo e si può pertanto definire un
potenziale
Z
~
r
V (~r) = −
~ r) · dr
~
E(~
r~0
in modo tale che
Z
r~b
La→b = q
~ = q(V (r~a ) − V (~
~ · dl
E
rb )).
r~a
Solitamente nella definizione di V si sceglie r~0 all’infinito, ma in alcuni casi
ciò non è possibile in quanto l’integrale diverge, e si deve pertanto scegliere
un punto dello spazio a potenziale nullo.
~ piccolo rispetto alla scala di variazione di E
~
Si ha per ∆r
Z ~r+∆r
~
~ ≈
~ r) · dr
~
E(~
V (~r + ∆r)
= V (~r) −
~
r
~ r) =
~ · E(~
≈ V (~r) − ∆r
= −∆xEx − ∆yEy − ∆zEz .
Si ha pertanto
∂V
∂x
∂V
Ey = −
∂y
∂V
Ez = −
∂z
~ .
~ = −5V
E
Ex = −
La conservatività del campo elettrostatico si esprime con l’equazione
I
~ = 0,
~ · dl
E
ovvero la circuitazone del campo elettrostatico è nulla.
2.3. IL TEOREMA DI STOKES
2.3
19
Il teorema di Stokes
~
Analizziamo ora la circuitazione di un generico campo C.
~ lungo la curva Γ è uguale alla somma delle
Si ha che la circuitazione di C
circuitazioni lungo le curve Γ1 = Γa + Γab e Γ2 = Γab + Γb in quanto la corda
Γab è percorsa in versi opposti ed il suo contributo totale è nullo.
Si puó quindi sezionare la superficie sottesa da Γ in superfici infinitesime
racchiuse dalle curve γi e si ha
I
XI
~
~
~
~ · dl.
C · dl =
C
Γ
i
γi
Si può inoltre supporre che le superfici infinitesime siano rettangolari.
~ su un rettangolo infinitesimo che
Calcoliamo quindi la circuitazione di C
senza perdita di generalità supponiamo avere i lati paralleli agli assi x e y di
lunghezza ∆x e ∆y.
I
~ = ∆xCx (x, y) − ∆xCx (x, y) + ∆yCy (x + ∆x, y) − ∆yCy (x, y) =
~ · dl
C
Γ
= ∆x∆y(
∂Cy ∂Cx
−
),
∂x
∂y
~ nel
dove nell’ultimo passaggio si è approssimata linearmente la funzione C
rettangolo.
Definiamo adesso l’operatore rotore:
x̂ ŷ x̂
∂
∂
~ =∇
~ ×C
~ = det ∂
.
rot C
∂x
∂y
∂z
Cx Cy Cz
Si ha
∂Cy ∂Cx
~ z = ∆S
~ ·∇
~ × C,
~
~ × C)
−
) = ∆S(∇
∂x
∂y
quindi sommando i contributi delle varie superfici infinitesime si ottiene il
teorema di Stokes:
I
I
~
~
~
~ ×C
~ · dS,
C · dl =
∇
∆x∆y(
Γ
S
dove S é una qualsiasi superficie racchiusa da Γ.
Nel caso del campo elettrostatico si ha che per ogni curva Γ (e quindi per
ogni superficie S)
I
I
~ =
~ = 0,
~ · dl
~ ×E
~ · dS
E
∇
Γ
S
quindi l’integrando del secondo integrale deve essere identicamente nullo:
~ ×E
~ = 0.
∇
20CAPITOLO 2. SECONDA LEZIONE (GIUSEPPE LA ROCCA, 12/10/2009)
Capitolo 3
Quarta lezione (Giuseppe La
Rocca, 19/10/2009)
3.1
3.1.1
Energia potenziale di un sistema di cariche
Sistemi discreti
Ci poniamo il problema di determinare quanta energia potenziale sia contenuta in un sistema di finite cariche puntiformi, ovvero quanto lavoro potremmo
estrarre dal sistema nel momento in cui volessimo disassemblarlo interamente
portando le cariche a +∞
Per calcolarlo, partiamo dalla situazione finale, in cui le cariche si trovano a +∞ e ricostruiamo il sistema carica per carica calcolando il lavoro
necessario a tale operazione.
Posto che il potenziale elettrico nel punto +∞ sia 0, il lavoro compiuto
per portare una carica q da +∞ a distanza r da una carica q0 fissata sarà:
qq0
r
Applicando il principio di sovrapposizione avremo che per portare l’nesima carica da +∞ in posizione compiremo un lavoro pari a:
X qi qj
L=
| r~i − r~j |
i<j
L=
Sommando su tutti gli indici 0 ≤ j ≤ n, si ottiene:
X X qi q j
U=
| r~i − r~j |
j i<j
21
22CAPITOLO 3. QUARTA LEZIONE (GIUSEPPE LA ROCCA, 19/10/2009)
→
3.1.2
U=
1 X qi qj
2 i6=j | r~i − r~j |
Sistemi continui
Vorremmo a questo punto ricavare una formula che sia in grado di descrivere
l’energia potenziale di un sistema anche quando questo sia costituito da una
distribuzione di carica continua. Proviamo ad estendere in maniera un po’
e la
naive la formula precedentemente trovata, chiamando per il momento U
nuova energia potenziale:
Z Z
1
e
ρ(~r)ρ(r~0 ) d3 vectr0 d3 vectr
U =
2
In cui ρ(vectr) è la densità di carica nel punto vecr. Utilizzando la
~E
~ = 4πρ riscriviamo U
e come:
relazione ∇
e = 1
U
2
Z
~ r))V (~r)
div(E(~
4π
~ · f~ + a div(f~) da cui:
Ma div(a · f~) = ∇a
Z
1
e
~ + |E
~ 2 | d3~r)
U =
div(V E
8π
Applichiamo il teorema della divergenza alla prima parte dell’integrale:
facendo tendere la superficie a +∞ essa risulterà pari a 0.
Z
Z
1
3
~ )~r = 0 → U
e =
~ 2 | d3~r
div(V Ed
|E
8π
Risultato che può essere letto come un integrale su tutto lo spazio di una
certa densità di energia locale pari a f rac| ~e |2 8π.
e . La cosa che salta subito all’occhio
Analizziamo ora le due quantità U e U
è che, mentre U è una quantità dotata di segno (un sistema costituito da
due cariche di segno opposto collocate a distanza finita ha meno energia
e è
potenziale di un sistema che presenti le stesse cariche poste a +∞), U
sempre positiva. Altro elemento notevole, il fatto che, calcolato in un sistema
e diverga.
contenente una carica puntiforme, U
e dell’ autoeQueste discrepanze sono dovute alla presenza all’interno di U
nergia, ovvero delll’energia potenziale dovuta all’effetto del campo generato
dalla carica puntiforme su se stessa o, in altri termini, del lavoro speso per
concentrare la carica puntiforme in una regione infinitesima di spazio.
3.1. ENERGIA POTENZIALE DI UN SISTEMA DI CARICHE
3.1.3
23
Esclusione dell’autoenergia
e nel
Proviamo ad eliminare manualmente la componente autoenergetica di U
caso specifico di un sistema costituito da due cariche puntiformi:
e= 1
U
8π
Z
~ r
div(E)~
V (~r)d3~r
4π
24CAPITOLO 3. QUARTA LEZIONE (GIUSEPPE LA ROCCA, 19/10/2009)
Capitolo 4
Sesta lezione (Giuseppe La
Rocca, 26/10/2009)
4.1
Conduttori
I conduttori sono corpi al cui interno le cariche presenti (o alcune di esse)
sono libere di muoversi quando sottoposte ad un campo elettrico. Dal punto
di vista dell’elettrostatica questo significa che in condizioni di equilibrio il
campo all’interno del conduttore deve essere nullo.In caso contrario infatti
le cariche contenute al suo interno sarebbero accelerate dal campo e non si
avrebbe quindi una condizione di equilibrio statico. Da questo derivano altre
due conseguenze importanti: non possono esistere differenze di potenziale
all’interno del conduttore e, per il teorema di Gauss, non possono esistere
densità di carica non nulle nei punti interni del conduttore. L’intera carica
totale si trova quindi distribuita sulla superficie esterna del conduttore sotto
forma di una densità superficiale di carica. Nelle immediate vicinanze del
conduttore il campo elettrico risulta essere normale al conduttore. Applicando il teorema di Gauss ad un cilindro molto schiacciato con una base
all’interno del conduttore e una fuori si ricava
E = 4πσn̂
4.2
(4.1)
Metodo delle funzioni di Green
Lo scopo di questo paragrafo è dare una soluzione formale del problema dell’elettrostatica con condizioni al contorno del tipo di Dirichlet o di Neumann
in maniera da ridurlo ad un problema indipendente dalle densità di carica
all’ interno del volume di interesse e dagli specifici valori delle condizioni al
contorno assegnate.
25
26CAPITOLO 4. SESTA LEZIONE (GIUSEPPE LA ROCCA, 26/10/2009)
4.2.1
Identità di Green
Il punto di partenza sono le cosidette identità di Green la prima delle quali
è già stata usata.
∇ · (g∇f ) = ∇g · ∇f + g∇2 f
(4.2)
Ovviamente vale anche
∇ · (f ∇g) = ∇f · ∇g + f ∇2 f
(4.3)
Da cui si ricava immediatamente la seconda identità di Green.
∇ · (g∇f − f ∇g) = g∇2 f − f ∇2 f
(4.4)
Utilizzando il teorema della divergenza si ottiene
Z
I
I
∂g
∂f
2
2
− f ds.
g∇ f − f ∇ f dv = (g∇f − f ∇g) · n̂ds = g
∂n
Vs
s
s ∂n
(4.5)
Applicando le identità precedenti ponendo
f (r0 ) = V (r0 )
g(r; r0 ) =
1
|r − r0 |
(4.6)
si ottiene
I s
1 ∂V (r0 )
0 ∂
−
V
(r
) 0
|r − r0 | ∂n0
∂n
Z Vs
1
|r − r0 |
1
1
∇2 V (r0 ) − V (r0 )∇2
0
|r − r |
|r − r0 |
ds0 =
dv 0 =
(4.7)
Z Vs
−4πρ
0
0
− V (r )(−4πδ(r − r ) dv 0 =
|r − r0 |
Z
= −4π
vs
Z
V (r) =
vs
ρ(r0 )
1
0
dv
+
|r − r0 |
4π
I s
ρ(r0 )
dv 0 + 4πV (r)
|r − r0 |
1 ∂V (r0 )
0 ∂
−
V
(r
) 0
|r − r0 | ∂n0
∂n
1
|r − r0 |
ds0
(4.8)
Tale risultato tuttavia non è utile per dare una soluzione del problema perchè
il secondo integrale (escluso il caso banale per cui la superficie che delimita la regione di interesse va all’infinito) contiene esplicitamente sia il valore
4.2. METODO DELLE FUNZIONI DI GREEN
27
del potenziale sia quello della componente normale del campo sul contorno
del volume di interesse. Tuttavia i dati del problema contengono solo alternativamente una sola edi queste due condizioni. E’ necessario ripetere
il procedimento utilizzando una funzione più generale al posto della g(r,r’)
utilizzata precedentemente dotata della sola proprietà
f (r0 ) = V (r0 )
0
∇2 G(r; r0 ) = −4πδ(r − r0 )
(4.9)
notiamo che tutte le funzioni del tipo
G(r; r0 ) =
1
+ ψ(r; r0 )
0
|r − r |
0
∇2 ψ(r; r0 ) = 0
(4.10)
sono dotate della proprietà che ci interessa.
Z
I 0
1
0 ∂
0
0
0
0
0 ∂V (r )
− V (r ) 0 G(r; r ) ds0
V (r) =
ρ(r )G(r−r )dv +
G(r − r )
0
4π
∂n
∂n
vs
s
(4.11)
a questo punto è possibile procedere in due modi leggermente diversi a seconda che le condizioni al contorno siano assegnate nella forma di condizioni
di Dirichlet o di Neumann.
4.2.2
Condizioni di Dirichlet
In questo caso basta semplicemente trovare una G(r;r’) tale che valga
GD (r; r0 ) = 0
(4.12)
quando r’ appartiene al contorno. In questo modo il primo termine dell’integrale si annulla e la soluzione risulta essere.
Z
I 1
0
0
0
0 ∂
0
ρ(r )G(r − r )dv −
V (r ) 0 G(r; r ) ds0
(4.13)
V (r) =
4π s
∂n
vs
4.2.3
Condizioni di Neumann
Questo caso differisce leggermente dal precedente perchè non è possibile porre
semplicemente
∂GD (r; r0 )
=0
(4.14)
∂n0
In tal caso risulterebbe nullo il flusso del gradiente di G sulla superficie e
quindi, per il teorema della divergenza, si annullerebbe anche l’integrale di
volume del laplaciano di G sul volume di interesse contro l’ipotesi
G(r; r0 ) = −4πδ(r − r0 )
(4.15)
28CAPITOLO 4. SESTA LEZIONE (GIUSEPPE LA ROCCA, 26/10/2009)
La scelta più naturale appare quindi quella di porre come condizione
∂GD (r; r0 )
−4π
=C=
0
∂n
s
(4.16)
Che conduce alla soluzione
Z
I 0
1
0
0
0
0 ∂V (r )
V (r) =
ρ(r )G(r − r )dv +
G(r − r )
ds0 + hV i (4.17)
0
4π
∂n
vs
s
L’ultimo termine rappresenta la media del potenziale sul contorno del volume
di interesse; tuttavia esso è soltanto una costante globale e quindi il suo valore
è ininfluente ai fini della soluzione di un problema con condizioni di Neumann.
4.3
Piano
E’ interessante notare che è possibile determinare facilmente la forma esplicita
delle funzioni di Green per il problema di Dirichlet quando sia nota per altra
via (ad esempio con il metodo delle cariche immagine) una soluzione per il
problema con potenziale nullo sul contorno ed una densità di carica formata
da una sola carica puntiforme posta all’interno del volume di interesse.
ρ = q0 δ(r − r0 )
(4.18)
ρ(r0 )GD (r − r0 )dv 0 = q0 GD (r; r0 )
(4.19)
V =0
Infatti si ha
Z
V (r) =
vs
Per esempio nel caso di un conduttore infinito che riempie il semispazio z¡0
la soluzione che si ottiene con il metodo delle cariche immagine è
1
1
!
p
−p
(x − x0 )2 + (y − y0 )2 + (z − z0 )2
(x − x0 )2 + (y − y0 )2 + (z + z0 )2
(4.20)
Da cui si ricava la funzione di Green per il problema di Dirichlet in presenza
di un piano conduttore infinito
!
1
1
GD (r; r0 ) = p
−p
0
2
0
2
0
2
2
(x − x ) + (y − y ) + (z − z )
(x − x) + (y − y 0 )2 + (z + z 0 )2
(4.21)
.
V (r) = q0
Capitolo 5
Ottava lezione (Giuseppe La
Rocca, 02/11/2009)
5.1
Riduzione di Poisson a Laplace.
Mostriamo come, per risolvere l’equazione di Poisson in un certo volume di
spazio con condizioni al contorno fissate e distribuzione di carica nota, é possibile ridursi a risolvere la sola equazione di Laplace. Sia ρ(r~0 ) la distribuzione
di carica, e sia V (~r) il potenziale che si deve determinare, di cui é noto il
valore sul bordo S, che chiameremo V0 (~r ∈ S). Poniamo:
Z
V1 (~r) =
VS
ρ(r~0 ) 3 ~0
dr
|~r − r~0 |
(5.1)
Abbiamo giá visto come V1 risolva l’equazione di Poisson, ma non é detto
che soddisfi le condizioni al contorno. Si supponga adesso di conoscere un
potenziale V 0 (~r) che rispetti l’equazione di Laplace ∇2 (V 0 (~r)) = 0 e tale che
V 0 (~r ∈ S) = V0 (~r ∈ S) − V1 (~r ∈ S)
sul contorno S.
Allora il potenziale V cercato é uguale a V 0 +V1 , infatti si verifica facilmente che V 0 + V1 rispetta l’equazione di Poisson (per la linearitá del laplaciano)
e le condizioni al bordo:
∇2 V = ∇2 V1 + ∇2 V 0 = −4πρ
V (~r ∈ S) = V1 (~r ∈ S) + V 0 (~r ∈ S) = V1 + V0 − V1 = V0
Ci siamo quindi ridotti a dover risolvere l’equazione di Laplace per V 0 invece
che quella di Poisson per V , senza alcuna perdita di generalitá.
29
30CAPITOLO 5. OTTAVA LEZIONE (GIUSEPPE LA ROCCA, 02/11/2009)
5.1.1
Tecnica di separazione delle variabili
Studiamo il seguente esempio relativo ad un piano bidimensionale: la regione
di spazio su cui vogliamo determinare il potenziale é quella tratteggiata in
figura.
Scegliamo per il nostro potenziale delle condizioni al bordo comode, del
tipo nulle su tre bordi e una data funzione V0 sul quarto:
V (x = 0, y) = 0 V (x = a, y) = 0 V (x, y → +∞) = 0 V (x, y = 0) = V0
Volendo riscrivere l’equazione di Laplace ∇2 V (x, y) = 0 in cordinate
cartesiane otteniamo
∂ 2V
∂ 2V
+
=0
∂x2
∂y 2
Ora il nostro obbiettivo é quello di riscrivere il potenziale come prodotto
di due funzioni rispettivamente nella sola x e nella sola y, che chiameremo:
V (x, y) = X(x)Y (y)
e che derivando danno
0=
∂ 2V
∂ 2V
∂ 2X
∂ 2Y
+
=
Y
+
X
∂x2
∂y 2
∂x2
∂y 2
Dividiamo ora il secondo membro per V (x, y) e vediamo come siamo
riusciti a dividere all’interno dell’equazione differenziale le due variabili, e
definiamo f(x) e g(y) come nella formula
5.1. RIDUZIONE DI POISSON A LAPLACE.
31
2
∂ X
1 ∂ 2X
1
∂ 2Y
1 ∂ 2Y
Y
=
=0
+
X
+
V (x, y)
∂x2
∂y 2
∂x2} Y ∂y 2
|X {z
| {z }
f (x)
g(y)
Per garantire l’uguaglianza per una qualunque variazione indipendente di
x e di y nella zona di interesse devo imporre che f (x) sia una costante k e di
conseguenza g(y) deve valere −k; abbiamo cosı́ separato il problema in due
equazioni differenziali ordinarie.
Per comoditá poniamo k = −α2 , per avere f (x) = −α2 e g(y) = α2 , e
concentriamoci sulla prima, cioé:
∂ 2X
= −α2 X(x)
∂x2
con X(x = 0) = X(x = a) = 0
Sappiamo che le soluzioni sono del tipo
X = sin αx
X = cos αx
Ma tutte quelle con il coseno non sono accettabili perché per le nostre
condizioni al bordo deve essere X(0) = 0
Non ci resta che imporre che sin (αa) = 0 cioé α = πa n con n = 1, 2, 3, . . .
Notiamo che n = 0 ci darebbe la soluzione banale V = 0 in tutto lo
spazio, mentre gli n < 0 non danno soluzioni linearmente indipendenti con
gli n > 0 perché cambiano solo di segno.
Analogamente per la seconda equazione abbiamo
∂ 2Y
= α2 X(x)
2
∂y
che da come soluzioni
π
Y = eαy = en a y
non accettabile
π
Y = e−αy = e−n a y
n = 1, 2, 3, . . .
Anche qui la prima classe di soluzioni non é accettabile per le condizioni al
bordo.
Ricordandoci come avevamo espresso il nostro potenziale come prodotto
delle due funzione X(x) e Y (y) possiamo finalmente scrivere la soluzione
32CAPITOLO 5. OTTAVA LEZIONE (GIUSEPPE LA ROCCA, 02/11/2009)
come sviluppo in serie di funzioni speciali
V (x, y) =
+∞
X
π
π
An sin(n x)e−n a y
a
n=1
dove la funzione V (x, y) é la piú generale soluzione dell’equazione di Laplace
che soddisfi tre su quattro delle nostre condizioni al bordo. Bisogna ancora
imporre che sia V (x, y = 0) = V0 (x), cioé
V (x, y = 0) =
+∞
X
π
An sin(n x) = V0 (x)
a
n=1
Riconosciamo nell’espressione sopra una serie di Fourier, in cui i coefficienti
An sono dati dall’espressione1 :
Z
2 a
π
An =
V0 (x) sin(n x)dx
a 0
a
5.2
Approssimazione in serie di funzioni.
Sia I = [0, a] un intervallo, e f : I → C una funzione. D’ora in poi, tutte
le funzioni che verranno citate saranno funzioni complesse aventi I come dominio. Ci si chiede quando sia possibile rappresentare f tramite una somma
infinita di funzioni {gn }n∈N , ed in quale senso lo si possa fare.
Definizione. Si dice che f : I → C é una funzione a quadrato sommabile
se vale:
Z a
|f (x)|2 dx < +∞
(5.2)
0
Definizione. Siano f e g funzioni complesse. Definiamo il prodotto
scalare2 :
Z a
f ∗ (x)g(x)dx
(5.3)
< f |g >=
0
∗
Dove con f (x) si intende il coniugato di f (x). La notazione é dovuta a
Dirac.
Osservazione. É evidente che, se g1 , ..., gM sono funzioni a quadrato
sommabile, anche la funzione:
1
si veda a riguardo la sezione successiva
In realtá non si tratta di un prodotto
scalare vero e proprio, perché é evidentemente non
Ra
simmetrico. Se fosse < f |g >= 0 f (x)g ∗ (x)dx si tratterebbe di un prodotto hermitiano.
2
5.2. APPROSSIMAZIONE IN SERIE DI FUNZIONI.
f=
M
X
33
cn g n
n=1
é a quadrato sommabile (c1 , ..., cn sono costanti
complesse).
P
La convergenza di una serie di funzioni n≥1 gn ad una funzione f sará
sempre intesa rispetto alla norma indotta dal prodotto scalare definito precedentemente. É possibile dimostrare che la convergenza uniforme implica
tale convergenza, ma non vale il viceversa, né ci sono implicazioni con la
convergenza puntuale.
Definizione. Sia {gn }n∈N un insieme numerabile di funzioni a quadrato
sommabile ortonormali (cioé tali che < gi |gj >= δij ). Diremo che {gn }n∈N
é una base delle funzioni a quadrato sommabile se, per ogni funzione f a
quadrato sommabile, esiste una successione di numeri complessi {cn }n∈N tali
che:
lim ||f (x) −
M →+∞
M
X
cn gn (x)|| = 0
(5.4)
n=0
Cioé che sia:
ΛM
v
uZ
u
≡t
0
a
(f (x) −
M
X
cn gn
n=0
(x))∗ (f (x)
−
M
X
cn gn (x))dx → 0
(5.5)
n=0
Disuguaglianza di Bessel. Sia {gn }n∈N un insieme di funzioni ortonormali a quadrato sommabile. Allora, per ogni M ∈ N, vale la disuguaglianza:
M
X
|cn |2 ≤< f |f >2
(5.6)
n=0
E si ha uguaglianza per M → +∞ se e solo se {gn }n∈N é una base dello
spazio delle funzioni a quadrato sommabile.
Condizione per la completezza. Si puó esprimere in modo alternativo
la condizione precedente per determinare se {gn }n∈N é una base. Se un insieme di {gn }n∈N di funzioni ortonormali é una base dell’insieme delle funzioni
sommabili si ha:
+∞
X
n=0
gn∗ (x0 )gn (x) = δ(x − x0 )
(5.7)
34CAPITOLO 5. OTTAVA LEZIONE (GIUSEPPE LA ROCCA, 02/11/2009)
Dove δ é la delta di Dirac. Per vederlo, usiamo la disuguaglianza di Bessel.
Notiamo che (usando l’ortonormalitá):
Z
a
cn =
gn∗ (x)
0
+∞
X
gn∗ (x)f (x)dx
ck gk (x)dx =
(5.8)
0
k=1
c∗n
a
Z
Z
=
a
f ∗ (x)gn (x)dx
(5.9)
0
Per la disuguaglianza di Bessel sappiamo che (usando |c|2 = cc∗ ):
+∞ Z
X
n=0
a
f (x1 )gn∗ (x1 )dx1
0
Z
a
a
Z
∗
f ∗ (x)f (x)dx
f (x2 )gn (x2 )dx2 =
0
(5.10)
0
Cioé, riordinando sommatoria e integrali:
a
Z
∗
Z
f (x1 )
0
a
(f (x2 )
0
+∞
X
gn (x1 )gn∗ (x2 )dx2 )dx1
=
a
f ∗ (x1 )f (x1 )dx1 (5.11)
0
n=0
E quindi deve essere
Z
P+∞
n=0
gn∗ (x1 )gn (x2 ) = δ(x2 − x1 ).
Capitolo 6
Nona lezione(Giuseppe La
Rocca, 5/11/2009)
6.1
Armoniche sferiche
6.1.1
Studio delle funzioni armoniche in coordinate sferiche
In questa lezione si esaminerà l’equazione di Laplace ∇2 V = 0 in coordinate
sferiche, in cui la funzione V dipende dalla distanza dall’origine r, dall’angolo
polare θ e dall’angolo azimutale ϕ. Calcolando esplicitamente le derivate
parziali otteniamo:
∇2 V (r, θ, ϕ) =
1
∂
∂V
1
∂ 2V
1 ∂2
(rV
)
+
(sin
θ
)
+
=0
r ∂r2
r2 sin θ ∂θ
∂θ
r2 sin2 θ ∂ϕ2
Questa equazione in generale non si risolve; tuttavia possiamo applicare il
metodo di separazione delle variabili nel caso in cui la funzione V (r, θ, ϕ) sia
esprimibile come prodotto di tre funzioni che dipendano ciascuna da una sola
delle tre variabili r, θ, ϕ. Ovvero:
V (r, θ, ϕ) = R(r)P (θ)Q(ϕ) =
U (r)
P (θ)Q(ϕ)
r
in cui verrà usata la funzione U (r)
come una generica funzione R(r), per
r
comodità di calcolo. Notiamo però che in questo modo U(r) ha la dimensione
di un numero puro, cosı̀ come P(θ) e Q(ϕ). Ora portiamo avanti i calcoli con
la funzione V fattorizzata in U, P e Q.
∇2 V (r, θ, ϕ) =
P Q d2 U
UQ d
dP
U P d2 Q
+
(sin
θ
)
+
=0
r dr2
r3 sin θ dθ
dθ
r3 sin2 θ dϕ2
35
36 CAPITOLO 6. NONA LEZIONE(GIUSEPPE LA ROCCA, 5/11/2009)
Moltiplichiamo entrambi i membri per
r3
:
UP Q
r3
r 2 d2 U
1
d
dP
1
d2 Q
=0
∇2 V =
+
(sin
θ
)
+
UP Q
dr2} P sin θ dθ
dθ
Q sin2 θ dϕ2
|U {z
{z
}
|
g(r)
h(θ,ϕ)
Ora, affinché l’espressione appena scritta sia identicamente nulla, deve valere
l’equazione g(r) = −h(θ, ϕ) = costante. Non possono esserci soluzioni in
cui la funzione g e la funfione h non siano costanti in quanto i valori assunti
dalle due funzioni variarerebbero in maniera indipendente l’una dall’altra al
variare dei loro parametri.
A questo punto poniamo g(r) = `(` + 1) e h(θ, ϕ) = −`(` + 1), in cui ` e un
numero intero strettamente positivo. Questa imposizione sul valore assunto
da g e h ci fa perdere in generalità, ma ci tornerà utile in seguito. Ora
consideriamo l’equazione differenziale:
U
d2 U
=
`(` + 1)
dr2
r2
la quale ha come base dello spazio delle soluzioni:
l
l+1
r
r
⇒ R(r) =
U (r) =
1
1
rl
rl−1
Proseguiamo sostituendo al posto di g(r) il valore `(`+1) e moltiplichiamo
entrambi i membri per sin2 (θ):
r3 sin2 θ 2
sin θ d
dP
1 d2 Q
∇ V = `(` + 1) sin2 (θ) +
(sin θ
)+
=0
2
UP Q
P
dθ
dθ
Q
dϕ
|
{z
} | {z }
a(θ)
b(ϕ)
Usando le stesse argomentazioni utilizzate precedentemente, si vede che
deve essere a(θ) = −b(ϕ) = costante. Poniamo inoltre a(θ) = m2 e quindi
b(ϕ) = −m2 , in cui m è una qualche intero relativo fissato. Ora consideriamo
quest’altra equazione differenziale:
d2 Q
= −m2 Q
2
dϕ
che ha come base dello spazio delle soluzioni:
+imϕ
e
Q(ϕ) =
e−imϕ
6.1. ARMONICHE SFERICHE
37
Notiamo ora che Q(ϕ + 2π) = Q(ϕ), in quanto la variabile varphi rappresenta un angolo in coordinate sferiche ed è periodica con periodo 2π. Quindi
deve essere eimϕ = eim(ϕ+2π) ; questo accade se e solo se m è intero, il che ci
giustifica la scelta fatta precedentemente.
Sostituendo −m2 a b(ϕ) arriviamo a ottenere l’equazione
sin θ d
dP
(sin θ
) + `(` + 1) sin2 θ − m2 = 0
P dθ
dθ
Le soluzioni a quest’equazione sono dette in generale armoniche sferiche
e sono una classse di funzioni di grande interesse per una larga categoria di
problemi.
6.1.2
Derivazione dell’equazione di Legendre
Per qualche momento tralasceremo lo studio delle soluzioni generali dell’equazione precedente, per interessarci invece al problema nel caso in cui sia
m = 0. Si vede facilmente che si ha m = 0 se e solo se Q(ϕ) = costante,
ovvero nel caso in cui il valore del potenziale V sia indipendente dall’angolo ϕ. Questo é valido per tutti i problemi aventi simmetria azimutale, cioé
simmetria cilindrica.
Moltiplichiamo entrambi i membri per sinP2 θ
1 d sin2 θ dP
(
) + `(` + 1)P = 0
sin θ dθ sin θ dθ
ed eseguiamo le sostituzioni: x = cos θ, dx = − sin θdθ e sin2 θ = 1 − x2 .
Notiamo che il dominio di x é dato dall’intervallo [−1; 1], estremi inclusi.
Alla fine otteniamo quella che é nota come equazione di Legendre:
dP
d
((1 − x2 ) (x)) + `(` + 1)P (x) = 0
dx
dx
in cui, ricordiamo, ` è un intero strettamente positivo e P(x) è la funzione
incognita dell’equazione.
6.1.3
Polinomi di Legendre
Ci restringiamo allo studio di soluzioni all’equazione di Legendre che siano
del tipo serie di potenze:
P (x) =
∞
X
n=0
∞
an x n ⇒
X
dP
=
nan xn−1
dx
n=1
38 CAPITOLO 6. NONA LEZIONE(GIUSEPPE LA ROCCA, 5/11/2009)
∞
X
d
dP
⇒
((1 − x2 ) ) =
{(n + 1)(n + 2)an+2 − n(n + 1)an }xn
dx
dx
n=0
In definitiva l’equazione di Legendre per le serie di potenze si può riscrivere
nel seguente modo:
∞
X
{`(` + 1)an + (n + 1)(n + 2)an+2 − n(n + 1)an }xn = 0
n=0
Adesso utilizziamo il fatto che un polinomio è identicamente nullo su
tutto il suo dominio (in questo caso è [-1;1]) se e solo se tutti i coefficienti del
polinomio sono uguali a zero. Inoltre ciò è vero anche per le serie di potenze,
ovvero l’unica serie di potenze che converge alla funzione nulla su tutto il
dominio è quella in cui tutti i coefficienti sono nulli.
Con questa premessa è possibile calcolare termine a termine le funzioni
soluzione dell’equazione, sfruttando la relazione ricorsiva che si ottiene imponendo nell’equazione che il coefficiente ennesimo sia uguale a zero. Otteniamo
cosı̀ la relazione:
an+2 =
n(n + 1) − `(` + 1)
an
(n + 2)(n + 1)
Notiamo che la successione dei coefficienti pari e quella dei coefficienti
dispari sono indipendenti, poiché il coefficiente (n+2)-esimo è determinato
unicamente dal coefficiente n-esimo. Quindi la successione dei coefficienti è
determinata solo dalla scelta arbitraria dei valoriPdei termini a0 e a1 .
Tuttavia sussiste il problema che la la serie ∞
n=0 an in generale diverge
e questo fa sı̀ che la soluzione non sia regolare nei punti x = 1 e x = −1, i
quali appartengono a pieno diritto al dominio.
Ci si può convincere della divergenza della serie notando che, per n0 << `,
0
an e quindi, semplificando ripetula relazione ricorsiva diventa an0 +2 ' n0n+2
0
tamente numeratori e denominatori, ottengo an0 +2k ' n0n+2k
an . Se a0 <> 0;
sommando sugli indici k, ottengo una serie equivalente alla serie armonica,
che notoriamente diverge.
C’è però un caso in cui la soluzione è regolare anche in questi punti, ed è
quella in cui la serie ha solo un numero finito di termini diversi da zero.
La soluzione banale si ottiene imponendo a0 = a1 = 0 (ovviamente i
coefficienti dipendono linearmente dalla scelta di a0 e a1 );
molto più interessante è il caso in cui ` è un numero intero (e adesso si
spiega perché era stato fatto questo assunto) e inoltre si impone:
a0 = 1
se ` pari
a1 = 0
6.1. ARMONICHE SFERICHE
39
a0 = 0
se ` dispari
a1 = 1
In questo maniera sopravvivono solo o i coefficienti pari o quelli dispari
fino al termine `-esimo; quando n = ` il termine a`+2 si annulla e con lui anche
tutti i termini successivi. I polinomi cosı̀ costruiti sono chiamati polinomi di
Legendre e vengono convenzionalmente indicati col simbolo P` (x).
I polinomi di Legendre sono una base per serie delle funzioni continuoe su
[-1;+1]. Vige la convenzione di “normalizzare” questi polinomi imponendo la
condizione P( 1) = 1, anziché imporre che il prodotto scalare di un polinomio
con se stesso valga uno. Vale invece la relazione:
< Pm (x)|Pn (x) >=
2
δn,m
2n + 1
In generale ogni funzione continua su [-1;+1] può essere scritta come:
f (x) =
∞
X
c` P` (x)
`=0
con
2` + 1
c` =
2
Z
+1
f (x)P` (x)dx
−1
In definitiva il potenziale soluzione dell’equazione di Laplace in coordinate
sferiche, nel caso in cui m = 0 è data da:
V (r, θ) =
∞
X
`=0
{A` r` + B`
1
r`+1
}P` (cos θ)
40 CAPITOLO 6. NONA LEZIONE(GIUSEPPE LA ROCCA, 5/11/2009)
Capitolo 7
Decima lezione (Giuseppe La
Rocca, 09/11/2009)
7.1
7.1.1
Le armoniche sferiche - Caso generale
Ricavare le armoniche sferiche
Visto che in questa lezione mi servirá particolarmente, utilizzeró il simbolo
(†) per indicare i salti di fede (ovvero i teoremi non dimostrati).
Torniamo all’equazione differenziale in P nella forma piú generale:
sin θ d
dP
(sin θ
) + `(` + 1) sin2 θ − m2 = 0.
P dθ
dθ
Non imponiamo piú la condizione m = 0, cioé consideriamo anche problemi
in cui manca la simmetria azimutale. Con la solita sostituzione x = cos θ si
ottiene l’equazione di Legendre generalizzata:
dP
m2
d
((1 − x2 ) (x)) + [`(` + 1) −
]P (x) = 0.
dx
dx
1 − x2
(†) La soluzione Pl,m (θ) dell’equazione di Legendre generalizzata é regolare
se e solo se m ed l sono interi tali che |m| ≤ l.
Quindi un sistema ortogonale completo sull’intero angolo solido é
Pl,m eimϕ =: Yl,m (θ, ϕ) · n,
dove n é un opportuno coefficiente di normalizzazione.
Le funzioni Yl,m (θ, ϕ) sono dette armoniche sferiche, e il coefficiente n é scelto
in modo che, indicato con z ∗ il complesso coniugato di z ∈ C,
Z
∗
dΩ Yl,m
(θ, ϕ)Yl0 ,m0 (θ, ϕ) = δl,l0 δm,m0 .
4π
41
42CAPITOLO 7. DECIMA LEZIONE (GIUSEPPE LA ROCCA, 09/11/2009)
Questo significa che gli Yl,m sono un sistema ortonormale completo rispetto
al prodotto scalare definito dall’integrale.
Le armoniche sferiche sono facilmente calcolabili per gli l ed m piccoli:
1
Y0,0 (θ, ϕ) = √
4π
r
3
Y1,0 (θ, ϕ) =
cos θ
4π
r
3
Y1,1 (θ, ϕ) = −
sin θeiϕ
8π
r
3
sin θeiϕ .
Y0,0 (θ, ϕ) =
8π
Il fatto che le Yl,m (θ, ϕ) siano un sistema ortonormale completo significa che
ogni funzione regolare puó essere scritta come
f (θ, ϕ) =
∞ X
l
X
Cl,m Yl,m (θ, ϕ),
l=0 m=−l
dove
Z
Cl,m =
∗
dΩ Yl,m
(θ, ϕ)f (θ, ϕ)
4π
7.1.2
Z
=
2π
Z
dϕ
0
π
sin θ dθ Y ∗ f.
0
Proprietá delle armoniche sferiche
• (†)Simmetria centrale: per r 7→ −r si ha (θ, ϕ) 7→ (π − θ, π + ϕ), e
quindi Yl,m (θ, ϕ) 7→ Yl,m (π − θ, π + ϕ) = (−1)l Yl,m (θ, ϕ)
• (†)Le armoniche sferiche per m negativo sono facilmente calcolabi∗
li grazie alla formula Yl,−m (θ, ϕ) = Yl,m
(θ, ϕ). Quindi, per f reale,
∗
m
Cl,−m = Cl, m (−1) .
Siamo finalmente pronti a enunciare la soluzione piú generale all’equazione
di Laplace (che, ricordiamo, da il potenziale in zone senza cariche):
V (r, θ, ϕ) =
+∞ X
+l
X
l=0 m=−l
(Al,m rl +
Bl,m
)Yl,m (θ, ϕ),
rl+1
dove i coefficienti Al,m e Bl,m , in generale complessi, sono fissati in modo da
soddisfare le condizioni al contorno assegnate.
7.1. LE ARMONICHE SFERICHE - CASO GENERALE
7.1.3
43
Teorema di addizione per le armoniche sferiche
Se γ é l’angolo compreso tra due versori n e n’ di coordinate polari rispettivamente (θ, ϕ) e (θ0 , ϕ0 ), l’espressione di cos γ é
cos γ = cos θ cos θ0 + sin θ sin θ0 cos(ϕ − ϕ0 ).
Questa espressione é peró poco comoda in quanto non separa le variabili
primate da quelle non. Invece il teorema di addzione afferma che (†):
l
4π X ∗ 0 0
Y (θ , ϕ )Yl,m (θ, ϕ),
Pl (cos γ) =
2l + 1 m=−l l,m
dove le variabili primate sono del tutto separate da quelle non primate. In
questo modo possiamo scrivere
∞ X
l
l
X
r<
1
4π
∗
Yl,m
=
· l+1
(θ0 , ϕ0 )Yl,m (θ, ϕ),
|r − r’|
2l + 1 r>
l=0 m=−l
il che torna utile per esplicitare
Z
V (r) =
V
7.1.4
ρ(r’) 3 0
d r.
|r − r’|
Esempio: potenziale con cariche localizzate
Consideriamo un calcolo di potenziale a grande distanza dalle cariche localizzate. ‘Localizzate’ puó significare semplicemente che esiste rmax tale che,
se r > rmax , ρ(r) = 0, ma il risultato vale anche per densitá di carica che
tendono a 0 piú velocemente di qualunque potenza in r (†).
In tale situazione possiamo fare l’approssimazione r< = r0 e r> = r, per cui
Z
ρ(r’) 3 0
dr =
V (r) =
V |r − r’|
Z
=
3 0
d r ρ(r’)
V
∞ X
l
X
l=0
4π
r0l ∗ 0 0
·
Y (θ , ϕ )Yl,m (θ, ϕ) =
2l + 1 rl+1 l,m
m=−l
Z
∞ X
l
X
Yl,m (θ, ϕ)
4π
∗
=
d3 r0 ρ(r’)
· r0l Yl,m
(θ0 , ϕ0 )
l+1
r
2l + 1
V
l=0 m=−l
44CAPITOLO 7. DECIMA LEZIONE (GIUSEPPE LA ROCCA, 09/11/2009)
7.1.5
Esempio: potenziale di quadrupolo
Consideriamo la distribuzione di cariche seguente: due cariche +q nei punti
(a, 0, 0) e (−a, 0, 0), altre due cariche −q nei punti (0, a, 0) e (0, −a, 0), carica
nulla nel resto dello spazio. Siamo interessati alla dipendenza del potenziale
da r a grandi distanze dall’origine: V (r >> a, θ, ϕ.
E’ chiaro che il termine dominante é quello con l minimo tale che almeno un
Bl,m 6= 0.
• l = 0: Y0,0 non dipende né da θ né da ϕ, ed é presente solo se la carica
netta é diversa da 0. Infatti
Z
B0,0 = d3 r0 ρ(r0 ) = Qtot = 0;
• l = 1: dipende in modo lineare da x, y e z. Infatti
Y1,1 = k sin θ · eiϕ = k 0 (x + iy)
Y1,−1 = k 0 (x − iy)
Y1,0 = cos θ = k 00 z
Ognuno di questi termini cambia segno per la trasformazione r 7→ −r,
mentre il sistema di cariche considerato ha simmetria centrale. Quindi
anche B1,m = 0 per m = −1, 0, 1.
• l = 2: non ci sono ragionevoli simmetrie che ci facciano escludere
questo termine, quindi in generale esso sará presente. In via teorica
dovrei calcolare le 3 funzioni B2,2 ,B2,1 e B 2, 0, visto che i termini con m
negativo si ricavano facilmente dagli altri. Di queste le prime due sono
complesse, la terza é reale. Ma é proprio necessario calcolarle tutte?
Osserviamo che V cambia segno per rotazioni di π/2 (ϕ 7→ ϕ+π/2); dal
canto loro, gli Yl,m dipendono da ϕ come emiϕ , quindi l’unico termine
che rispetta la proprietá di simmetria enunciata sopra é Y2,2 , e l’unico
coefficiente da calcolare é B2,2 (e di conseguenza B2,−2 ).
L’integrale si trasforma in una semplice sommatoria di 4 termini e,
inserendo il valore tabulato
r
15
Y2,2 =
sin2 θe2iϕ ,
32π
otteniamo finalmente
B2,2 = B2,−2
4π
=
· qa2
5
r
15
(1 + 1 + 1 + 1) = 4qa2
32π
r
3π
,
10
7.1. LE ARMONICHE SFERICHE - CASO GENERALE
45
da cui si ottiene il termine dominante per il potenziale a grandi distanze:
V (r, θ, ϕ) '
3qa2
sin2 θ cos(2ϕ).
r3
Ancora qualche considerazione generale: é chiaro che in coordinate
sferiche i gradi di libertá del termine di quadrupolo sono 5: 2 per
ognuno dei doefficienti complessi, e 1 per quello reale. Pertanto, anche
in coordinate cartesiane si devono avere 5 gradi di libertá. Svolgendo i
conti con i valori tabulati delle Y , si scopre che il termine di quadrupolo
in coordinate cartesiane é una forma quadratica, e che la traccia della
matrice associata é proporzionale al termine di monopolo. Quindi i
gradi di libertá (due per la diagonale, 3 per il resto della matrice) sono
rispettati.
46CAPITOLO 7. DECIMA LEZIONE (GIUSEPPE LA ROCCA, 09/11/2009)
Capitolo 8
Dodicesima lezione (Giuseppe
La Rocca, 16/11/2009)
47
48CAPITOLO 8. DODICESIMA LEZIONE (GIUSEPPE LA ROCCA, 16/11/2009)
Capitolo 9
Quattordicesima lezione
(Giuseppe La Rocca,
23/11/2009)
9.1
Introduzione alle correnti elettriche
Prima di proseguire con la magnetostatica ci soffermeremo brevemente sulle
correnti elettriche, in quanto cosı́ come il campo elettrico é il mediatore delle
interazioni fra cariche elettriche statiche, analogamente il campo magnetico
é il mediatore delle interazioni tra le corenti.
9.1.1
Comportamenti macroscopici
, e definiamo la densitá di corDefiniamo la corrente elettrica come I = ∆Q
∆t
∆I
rente elettrica come J = ∆A dove A é la sezione dell’oggetto attraverso cui
∆I~
passa la corrente I. Il vettore corrente elettrica é definito come J~ = ∆A
da cui
R
~
~
segue che la corrente si puó scrivere come I = S J • ds dove S é la superficie
della sezione che stiamo considerando. Una famiglia molto ampia di conduttori é quella formata dai conduttori ohmici, nei quali esiste una linearitá tra
E e I. In essi vale la relazione I = VR detta legge di Ohm, dove R,la resistenza
L
del materiale, é definita come R = ρ A
dove L é la lunghezza dell’oggetto,
A la sua sezione e ρ la sua resistivitá, caratteristica che dipende di solito
principalmente dalla temperatura dell’oggetto e dal materiale da cui esso é
costituito. La potenza dissipata, definita come lavoro per unitá di tempo, é
quindi definita come P = ∆Q
V = IV da cui, sostituendo la legge di Ohm,
∆t
ricaviamo la legge di Joule P = RI2.
49
50CAPITOLO 9. QUATTORDICESIMA LEZIONE (GIUSEPPE LA ROCCA, 23/11/2009)
9.1.2
Modellizzazione microscopica
Per cercare di spiegarci la linearitá esistente tra campo elettrico e corrente,
consideriamo un tratto di filo in cui passa della corrente in regime stazionario.
~ Consideriamo i portatori
Poniamo l’asse positivo delle z orientato come J.
di carica. Siccome siamo in regime stazionario per ogni portatore di carica,
detta m la sua massa, mz̈ = 0. Notiamo dunque che non é corretto ipotizzare
che l’unica forza ad agire sia la forza elettrica. Questa ipotesi porterebbe a
concludere ma = qE, che é incompatibile con mz̈ = 0, nella quale tra le
altre cose non ci sarebbe dissipazione di energia. Possiamo quindi ipotizzare
che oltre alla forza elettrica ci sia un agente dissipativo: mz̈ = qE − γ ż = 0
dove q é la carica di un portatore di carica e γ una costante. Ne segue
quindi che la velocitá media vz dei portatori di carica lungo z é data da
. Abbiamo che la corrente elettrica si puó scrivere ovviamente come
vz = qE
γ
I = nqvz A dove n é il numero di portatori di carica per unitá di volume,
e quindi riguardo alla densitá di corrente elettrica ricaviamo che J = AI =
nqvz = ρvz dove ρ é definito da questa relazione (o probabilmente per qualche
~ esso é
motivo é lo stesso ρ di prima). Per quanto riguarda il vettore J,
qE
q2
~ = σc E.
~ Se chiamiamo L la lunghezza del filo,
dato da J~ = nq γ = n γ E
V
EL
abbiamo che I = R = LρR da cui segue che J = AI = ρER da cui segue che
σc = ρ1R . A questo punto cerchiamo di giustificare l’energia dissipata con il
nostro modello, se chiamiamo p l’energia dissipata da un portatore di carica
)2 = q2E2
. Da questa ricaviamo per
abbiamo che: 0 < p = γ ż2 = γvz2 = γ( qE
γ
γ
q2E2
nq2
la potenza dissipata: P = γ nLA = γ LAE2 = σc LAE2 = JALE = IV .
9.1.3
Equazione di continuitá per la carica
Consideriamo il bilancio della carica
Sia S una suH nel caso di correnti.
~ = − ∆Qint per il principio di
perficie chiusa, abbiamo che I = S J~ • ds
∆t
conservazione
abbiamo che
H
R della carica. Ma per il teorema della divergenza
R
~
~
~
J • ds = vs dV div J mentre abbiamo che Qint = vs dV ρ . Da ció segue
S
che,
se la superficie
riscrivere la relazione
iniziale come
R
R é ferma, possiamo
R
R
d
d
d
~
~
dV div J = − dt vs dV ρ e quindi vs dV div J = − dt vs (− dt ρ)dV . Con un
vs
passaggio al limite posso considerare un volume infinitesimo nell’intorno del
punto di interesse, e quindi ottenere div J~ + ∂ρ
= 0. Questa é detta equazione
∂t
di continuitá per la carica, in quanto fondamentalmente asserisce che le trasmissioni di carica sono continue, non possiamo avere della carica che sparisce
in un punto e ricompare in un’altro. Da notare che ció é conseguenza della
relazione appena trovata, non é giá contenuta nel principio di conservazione
9.2. IL CAMPO MAGNETICO
51
della carica. Nei sistemi stazionari, ossia dove nulla dipende dal tempo,
da cui segue che div J~ = 0.
∂ρ
∂t
9.2
Il campo magnetico
In generale una particella in movimento oltre a subire una forza dovuta al
campo elettrico subisce un altro tipo di forza detta forza magnetica. La forza
magnetica puó essere descritta interamente a partire da un campo vettoria~ Una
le nello spazio detto campo magnetico, usualmente indicato con: B.
particella con carica q che si muova con velocitá ~v in presenza contempora~ e di un campo magnetico B
~ subisce una
neamente di un campo elettrico E
forza:
~
~ + q ~v × B
F~ = q E
c
(9.1)
che nel caso in cui il campo elettrostatico sia assente diventa:
~v
~
F~ = q × B
c
(9.2)
Abbiamo dunque un metodo operativo per misurare il campo magnetico presente in una regione di spazio e cioé possiamo misurare la forza in direzione
modulo e verso agente su una carica con le precedenti carattersitiche e sottrarre l’evnetuale contributo dovuto alla forza elettrostatica. Invertendo la
~ Da notare che nella espressione
precedente relazione é possibile ricavare B.
per la forza magnetica compare come costante moltiplicativa: l’inverso della
velocitá della luce. Questa espressione della forza magnetica é legata al sistema di unitá di misura da noi addottato, in cui campo elettrico e magnetico
hanno le stesse unitá di misura. La scelta di c come velocitá campione ha
motivi relativistici. Anticipiamo che per quanto verrá spiegato nel paragrafo
~ é un vettore falso.
successivo dal momento che F~ e ~v sono vettori veri B
9.2.1
Vettori veri e vettori falsi
Un vettore nello spazio tridimensionale é detto controvariante, se si trasforma
come le sue coordinate. Piú precisamente siano X un riferimento cartesiano
e M una matriceinvertibile . Consideriamo ora il riferimento trasformato
secondo M: X’=MX. Se le coordinate di un vettore controvariante nel primo
sistema di riferimento sono v nel nuovo sistema di riferimento dovranno essere
v’=Mv. I vettori falsi (o pseudovettori o vettori assiali) si distinguono dai
52CAPITOLO 9. QUATTORDICESIMA LEZIONE (GIUSEPPE LA ROCCA, 23/11/2009)
colleghi controvarianti (detti anche veri o polari) in quanto per inversione
del sistema di coordinate non trasformano come quest’ultime, ma restano
immutati. L’inversione delle coordinate nello spazio tridimensionale é una
trasformazione che cambia segno a tutte e tre le coordinate spaziali e che
quindi trasforma una terna destrorsa in una sinistrorsa e viceversa. A questo
punto é facile mostrare che ~c = ~a ×~b nello spazio tridimensionale é un vettore
falso se ~a e ~b sono entrambi veri o entrambi falsi , é un vettore vero se uno
dei due é vero e l’altro falso. Questa proprietá si dimostra a partire dalla
formula per il prodotto vettore:
~a × ~b = (b3 a2 − b2 a3 )xˆ1 + (b1 a3 − b3 a1 )xˆ2 + (b2 a1 − b1 a2 )xˆ3
(9.3)
Notiamo che se tutti i bi e gli ai cambiano di segno (~a ~b vettori veri) le
coordinate di ~c non cambiano; se bi e gli ai non cambiano(~a ~b vettori falsi)
ovviamente ~c non cambia; se invece cambiano o i bi o gli ai le coordinate di
~c cambiano segno.
9.2.2
Azione del campo magnetico sulle correnti
Sia ∆L un tratto infinitesimo di un filo percorso da corrente I immerso in
un campo magnetico B. Sperimentalmente si osserva che sul tratto di filo si
esercita una forza:
~ ×B
~
~ = I ∆L
(9.4)
∆F
c
Notiamo che con il modello che abbiamo per il passagio di corrente nei
conduttori Ohmici possiamo trovare un legame tra questa forza e la forza in
(9.2).
~ = I ∆L
~ ×B
~
∆F
c
A ~
~
= J~∆L
×B
c
A∆L ~ ~
=
J ×B
c
A∆L
~
=
ρ~v × B
c
A∆L
~
= nq
~v × B
c
q~v
~
= A∆L × B
c
(9.5)
~
9.3. CARRATTERISTICHE DI B
9.2.3
53
Campo magnetico generato da correnti
Cosı́ come la carica per il campo elettrico, le correnti sono mediatrici del
campo magnetico. Una corrente oltre a subire una forza se si trova in presenza
di un campo magnetico, ne genera uno a sua volta. Questo fenomeno fu
indagato da Oersted che misuró l’azione meccanica che si esercitava tra due
correnti. Presi due fili paralleli molto lunghi, percorsi da correnti I1 e I2 ,
andiamo ad indagare nella regione centrale, dove si puó supporre che abbiano
lunghezza infinita. In questa zona si ha che la forza per unitá di lunghezza
ha espressione:
2I1 I2
∆F
= 2
∆L
cd
(9.6)
Se le correnti sono concordi la forza é attrattiva altrimenti é repulsiva.
Dal risultato precedente si puó dedurre che il campo generato é lineare con
~ in un generico punto P
la corrente. Per quello che riguarda la direzione di B
dello spazio, puó essere determinata tenendo unicamente conto delle simme~ é un vettore falso. Facendo una simmetria rispetto al
trie e del fatto che B
piano contenente il filo e P si nota che l’unica componente che si puó salvare
é quella perpendicolare al piano. Infatti, osservando la (9.3), notiamo che
invertendo solo rispetto ad una coordinata, ad esempio x1 , le componenti di
~c lungo i versori xˆ2 e xˆ3 cambiano segno mentre quella lungo xˆ1 resta invariata. Questo é valido per una qualsiasi terna di coordinate ortogonali, dunque,
scelto un qualsiasi vettore x~1 , la simmetria rispetto al piano perpendicolare
a x~1 , agisce su un vettore falso lasciando invariata la sua componente nella
direzione di x~1 e cambiando di segno quelle sul piano di simmetria. Questo
risultato é generale per un qualsiasi vettore falso. Una volta trovata la dire~ resta da determinarne il verso, che puó essere scelto proprio grazie
zione di B
all’esperimetno di Oersted tenendo conto di (9.4). Infine il modulo sará dato
da:
B2 = 2
9.3
I2
cd
(9.7)
~
Carratteristiche di B
A questo punto possiamo indagare il comportamento locale del campo ma~ e div B?
~ Per quanto riguargnetico chiedendoci ad esempio: Cosa sono rotB
da la divergenza, notiamo che le linee di forza del campo magnetico sono
~ = 0 da cui deduciamo che il flusso del campo magnetico
chiuse dunque div B
54CAPITOLO 9. QUATTORDICESIMA LEZIONE (GIUSEPPE LA ROCCA, 23/11/2009)
attraverso una qualsiasi superficie chiusa é zero. Un campo la cui divergenza
sia zero si dice soleinoidale, e questa caratteristica, per il campo magnetico,
si traduce nell’impossibilitá di isolare il monopolo magnetico. Questa caratteristica del campo magnetico resta vera anche nel caso dinamico. La forza
magnetica é una forza conservativa in quanto per (9.2) é sempre perpendi~ é in generale diverso da
colare alla velocitá. Per quello che riguarda rotB
zero. Nel caso particolare del filo infinito perscorso da corrente si ha che la
circuitazione del campo magnetico é:
I
˙ = 2πd 2I = 4π I
~~dl
B
dc
c
γ
(9.8)
Dove il verso di percorrenza di γ é sato scelto con la regola della mano
destra: ponendo il pollice nel verso della corrente la curva é percorsa nel
senso delle altre quattro dita quando si chiudono a pugno. Come risultato
generale si trova che:
I
˙ = 4πIconc.
~~dl
(9.9)
B
c
γ
dove Iconc. é la corrente concatenata al percorso chiuso scelto. Il risultato non
dipende dalla forma del percorso. Questa legge é nota come Legge di Ampére
ed é valida solo in magnetostatica. Dalla legge di Ampére deduciamo:
Z
Z
~ 4π J~
~ d˙S
~=
dS
(9.10)
rotB
c
Sγ
Sγ
dove Sγ é una qualsiasi curva che ha il bordo su γ. La (9.10) implica che:
~ =
rotB
9.4
4π ~
J
c
(9.11)
Legge di Biot-Savart
Appuriamo come fatto sperimentale che il campo magnetico generato da una
~ r:
densitá di corrente J(~
)
~ r) =
B(~
Z
d3 r 0
~ r~0 ) × (~r − r~0 )
J(
c|~r − r~0 |3
La (9.12) per un elemetno infinitesimo di corrente diventa:
(9.12)
9.4. LEGGE DI BIOT-SAVART
~0
~ × (~r − r )
~ r) = I ∆L
∆B(~
c
|~r − r~0 |3
55
(9.13)
Quest’ultima equazione é il corrispettivo magnetostatico del campo elettrico generato da una carica.Il ruolo della carica é svolto dall’elemento ∆L
di corrente.
56CAPITOLO 9. QUATTORDICESIMA LEZIONE (GIUSEPPE LA ROCCA, 23/11/2009)
Capitolo 10
Sedicesima lezione (Giuseppe
La Rocca, 30/11/2009)
10.1
Equivalenza tra le equazioni di Maxwell
e Biot - Savart.
Per acquisire familiarità con il formalismo dell’analisi vettoriale, mostriamo
l’equivalenza tra le equazioni di Maxwell:
~ ·B
~ =0
∇
(10.1)
~ ×B
~ = 4π J~
∇
c
E l’equazione di Biot-Savart:
~ r) =
B(~
10.1.1
Z
d3 r 0
~ r0 ) × (~r − ~r0 )
J(~
c|~r − ~r0 |
(10.2)
Biot-Savart implica le equazioni di Maxwell.
Mostriamo prima che la 10.2 implica le 10.1. La 10.2 puo essere scritta come:
~ r) =
B(~
Z
~ r) =
B(~
Z
d3 r 0
~ r~0 )
J(
1
~
))
× (−∇(
c
|~r − r~0 |
~
d3 r0 (∇(
1
|~r − r~0 |
)×
~ r~0 )
J(
)
c
Usando l’identità:
~ × (a~v ) = ∇a
~ × ~v + a(∇
~ × ~v )
∇
57
(10.3)
(10.4)
58CAPITOLO 10. SEDICESIMA LEZIONE (GIUSEPPE LA ROCCA, 30/11/2009)
Con a =
1
|~
r−~
r0 |
~ si ottiene:
e ~v = J/c,
~ r) =
B(~
Z
~ 0
~ r0 )
1 ~
J(~
~ × ( J(~r ) ) −
d3 r 0 ∇
∇
×
c|~r − ~r0 |
|~r − ~r0 |
c
(10.5)
~ r0 ) non dipende dalle coordinate non primate,
Da cui, tenendo conto che J(~
si ha:
~ r) =
B(~
Z
~ r0 )
J(~
)
d r∇×(
c|~r − ~r0 |
3 0~
(10.6)
Poichè il rotore è fatto sulle coordinate non primate e l’integrale è su
quelle primate, il loro ordine può essere scambiato:
~ r) = ∇
~ ×
B(~
Z
d3 r 0 (
~ r0 )
J(~
)
c|~r − ~r0 |
(10.7)
R
~ r0 )
~ r) = d3 r0 ( J(~
~
Diciamo che il vettore A(~
) è il potenziale vettore di B.
c|~
r−~
r0 |
~ è il rotore di un altro vettore, la sua divergenza è nulla, e la prima
Poichè B
delle 10.1 è dimostrata.
Per dimostrare la seconda delle 10.1, usiamo l’identità vettoriale:
~ × (∇
~ × f~) = ∇(
~ ∇
~ · f~) − ∇
~ 2 f~
∇
~ 2 f~ =
Dove il laplaciano di un vettore è calcolato per componenti: ∇
2
2
2
~ e usiamo l’identità precedente; si ha
(∇ fx , ∇ fy , ∇ fz ). Poniamo f~ = A
quindi:
~ ×B
~ = ∇(
~ ∇
~ · A)
~ −∇
~ 2A
~
∇
(10.8)
~ è nulla. Usando l’identità ∇
~ · (a~v ) =
Mostriamo che la divergenza di A
~
1
J
~ · ~v + ∇a
~ · ~v , con a =
a∇
e ~v = c , si ha:
|~
r−~
r0 |
~ ·A
~=∇
~ ·
∇
Z
=
d3 r0
Z
Z
~ r~0 )
~ r~0 )
J(
J(
3 0~
dr
=
d
r
∇
·
=
c|~r − ~r0 |
c|~r − ~r0 |
3 0
~ r0 )
~ r0 )
1 ~ J(~
1
J(~
~
∇
·
+
∇(
)
·
|~r − ~r0 |
c
|~r − ~r0 |
c
(10.9)
(10.10)
~ r0 ) non dipende espliIl primo addendo è chiaramente nullo perchè J(~
citamente dalle coordinate non primate. Modifichiamo il secondo termine
notando che:
~
∇
1
~0 1
= −∇
0
|~r − ~r |
|~r − ~r0 |
(10.11)
10.1. EQUIVALENZA TRA LE EQUAZIONI DI MAXWELL E BIOT - SAVART.59
Perció si ottiene:
~ ·A
~=−
∇
Z
~ 0(
d3 r0 ∇
~ r0 )
J(~
1
)
·
|~r − ~r0 |
c
(10.12)
~ · (a~v ) = a∇
~ · ~v + ∇a
~ · ~v , si ha:
Usando ancora l’identità ∇
~ ·A
~=−
∇
Z
~ 0
~ r0 )
1 ~ 0 J(~
~ 0 · J(~r ) −
d3 r0 ∇
∇
·
c|~r − ~r0 | |~r − ~r0 |
c
(10.13)
Il secondo addendo nell’integrale è nullo perchè la divergenza della densità di corrente è nulla in magnetostatica (se non lo fosse, per l’equazione di
continuità starebbe cambiando la densità di carica nello spazio, e non saremmo a regime stazionario). Applicando il teorema della divergenza al primo
addendo nell’integrale, si ottiene
~ ·A
~=−
∇
I
d2 r 0
S
~ r0 )
J(~
· n̂0
c|~r − ~r0 |
(10.14)
E tale integrale fa 0 se si sceglie una superficie S sufficientemente grande (la densità di corrente è localizzata, o decresce rapidamente all’infinito).
~ è nulla.
Perciò la divergenza di A
Per concludere la dimostrazione, consideriamo una componente del laplaciano
~ Usando che J(~
~ r0 ) non dipende esplicitamente da ~r, si ha:
di A.
~ Ax =
∇
2
Z
r
3 0 Jx (~
dr
c
0
)~2
∇(
1
)=
|~r − ~r0 |
Z
d3 r 0
Jx (~r0 )
−4π
(−4πδ(~r − ~r0 )) =
Jx (~r)
c
c
(10.15)
Da cui si ottiene la seconda delle 10.1.
10.1.2
Le equazioni di Maxwell implicano Biot-Savart.
Per dimostrare la seconda implicazione, usiamo il seguente fatto: se una
~ · f~ = 0 in ogni punto di R3 , allora esiste una funzione
funzione f~ è tale che ∇
~ × ~g . Questo enunciato, che non dimostriamo, è analogo al
~g tale che f~ = ∇
fatto che ogni funzione avente rotore nullo è il gradiente di un’altra funzione
~ = −∇V
~ . Perció, per la prima delle 10.1, si puó scrivere
(ad esempio, E
~ r) = ∇
~ × A(~
~ r). Scegliamo A
~ in modo che abbia divergenza nulla, anche
B(~
se non dimostriamo che è possibile farlo1 .
In questo modo, la seconda delle 10.1 diventa:
~1 = A
~ + ∇g
~ e si sceglie ~g
Comunque non è difficile dimostrarlo; si pone A
opportunamente
1
60CAPITOLO 10. SEDICESIMA LEZIONE (GIUSEPPE LA ROCCA, 30/11/2009)
~ × (∇
~ × A)
~ = 4π J~
∇
c
(10.16)
Da cui:
~ ∇
~ · A)
~ −∇
~ 2A
~ = 4π J~
∇(
(10.17)
c
~ è nulla e passando alle singole compoE, usando che la divergenza di A
nenti, si ha:
4π
Jx
(10.18)
c
Questa equazione è formalmente identica all’equazione di Poisson. Perció
la soluzione è (tornando ai vettori):
∇2 Ax = −
~ r) =
A(~
Z
d3 r 0
~ r0 )
J(~
c|~r − ~r0 |
(10.19)
~ ha divergenza nulla, come lo si è
Si puó verificare direttamente che A
~ =∇
~ ×A
~ si ottiene
fatto nella sezione precedente. Scrivendo quindi che B
proprio la legge di Biot-Savart.
10.2
Sviluppo in multipoli del poenziale vettore.
Ci poniamo ora il problema di determanare il potenziale vettore generato
da una distribuzione localizzata di correnti a grande distanza dalle stesse.
Prima di cominciare richiamiamo i seguenti sviluppi: nell’approssimazione
r >> a vale
r~0 · ~r
|~r − r~0 | ≈ ~r −
r
1
1 r~0 · ~r
≈ + 3
~r
r
|~r − r~0 |
Quindi possiamo scrivere
!
Z ~ ~0
0 ·~
~ r~0 )
~
J(
J(
r
)
1
r
r
~ r) =
A(~
d3 r~0 ≈
+ 3
d3 r~0 =
0
~
c
~
r
r
r−r|
V c |~
V
Z
Z
X
1
1
3 ~0
0
~
~ r~0 )d3 r~0
~
=
J(r )d r +
r
ri0 J(
3 i
cr V
cr
V
i=x,y,z
Z
(10.20)
10.2. SVILUPPO IN MULTIPOLI DEL POENZIALE VETTORE.
61
Notiamo ora che vale la seguente relazione:
~ · (xJ)
~ = x̂ · J~ + x∇
~ · J~ = Jx
∇
~ J~ = 0, quindi la componente x del vettore J~ puó
perché in magnetostatica ∇
~ · (xJ)
~
essere sostituita da ∇
Cerchiamo di determinare la prima componente del potenziale vettore:
Z
X 1 Z
1
0
3
~ 0 · x J(
~ r~0 ) d r~0 +
Ax (~r) =
∇
ri
ri0 Jx (r~0 )d3 r~0
(10.21)
3
cr V
cr
V
i=x,y,z
Di cui il primo termine é nullo in quanto per il teorema della divergenza ci
possimo ricondurre ad un integrale di superficie che tende a zero mandando
la superficie all’infinito
Z
I
0 ~ ~0
3 ~0
0
~
~ r~0 )dS S→+∞
∇ · x J(r ) d r = x0 J(
−→ 0
V
Dobbiamo ora distinguere i suguenti casi; il termine dato dalla componente
x
Z
x0 Jx (r~0 )d3 r~0
V
e il termine dato dalle altre due componenti
Z
Z
0
3 ~0
0
~
z 0 Jx (r~0 )d3 r~0
y Jx (r )d r e
V
V
IL primo é nullo in quanto x0 Jx (r0 ) = 21 ∇0 (x02 J(r0 )) infatti
~ 0 (x2 J)
~ = 2x x̂ · J + x2 ∇
~ · J~ = 2xJx
∇
e posso trasformarlo in un integrale di superficie che per lo stesso ragionamento di prima tende a zero. Ora tocca agli altri due, e anche qui sfruttiamo
la relazione che mi dice
~
~ = xŷ · J~ + yx̂ · J~ + xy ∇
~ · J~ = xJy + yJx
∇(xy
J)
e quindi, ancora una volta per il teorema della divergenza,
Z x0 Jy (r~0 ) + y 0 Jx (r~0 ) d3 r~0 = 0
(10.22)
V
A questo punto rimettiamo insieme i pezzi; la componente x é data da
62CAPITOLO 10. SEDICESIMA LEZIONE (GIUSEPPE LA ROCCA, 30/11/2009)
~ r) ≈ 1
A(~
cr3
Z
(r~0
· ~r) Jx
1
= 3
cr
(r~0 ) d3 r~0
V
Z
(xx0 + yy 0 + zz 0 ) Jx (r~0 ) d3 r~0
V
di cui sappiamo che l’integrale che coinvolge il termine xx’ é nullo; quindi, a
meno di una manipolazione, resta
~ r) = 1
A(~
cr3
Z V
(y 0 Jx − x0 Jy )
(z 0 Jx − x0 Jz )
y
+z
2
2
d3 r~0
(10.23)
dove al posto di y 0 Jx (e quindi anche di z 0 Jx ) abbamo aggiunto se stesso
a diviso per 2 grazie alla relazione (3). vogliamo ora mostrare che il risultato
ottenuto non é altro che la componente x del vettore
m
~ ∧ ~r
r3
dove con m
~ intendiamo
1
m
~ =
2c
Z
~
r~0 ∧ J(~r)0 d3 r0
(10.24)
V
Infatti osservando che
Z
Z
1
1
0
0
(z Yx − x Jz )mz =
(x0 Yy − y 0 Jx )
my =
2c V
2c V
otteniamo
(m
~ ∧ ~r)x = (my z − mz y) =
1
2c
Z
V
3
0
0
0
0
y (y Jx − x Jy ) +z (z Jx − x Jz ) d r~0
|
{z
}
|
{z
}
−mz
my
che riconosciamo essere, a meno del denominatore r3 la componente x del
potenziale scalare calcolata precedentemente. Per le altre componenti possiamo seguire un ragionamento del tutto analogo e concludere quindi che a
grandi distanze il potenziale magnetico é dato da:
~ ∧ ~r
~ r) ≈ m
A(~
r3
10.2. SVILUPPO IN MULTIPOLI DEL POENZIALE VETTORE.
10.2.1
63
Calcolo del momento di dipolo magnetico per
una spira chiusa
Consideriamo una spira piana chiusa percorsa dalla corrente I, in tal caso
l’integrale di volume nella (4) diventa un integrale di linea lungo il circuito
I
I
I
x~0 ∧ d~l0 = S~n
(10.25)
m
~ =
2c γ
c
dove con S si intende ovviamente l’area racchiusa dalla spira.
64CAPITOLO 10. SEDICESIMA LEZIONE (GIUSEPPE LA ROCCA, 30/11/2009)
Capitolo 11
Diciannovesima lezione
(Giuseppe La Rocca,
14/12/2009)
65
66CAPITOLO 11. DICIANNOVESIMA LEZIONE (GIUSEPPE LA ROCCA, 14/12/2009)
Capitolo 12
Terza lezione (Franco Ligabue,
15/10/2009)
67
68CAPITOLO 12. TERZA LEZIONE (FRANCO LIGABUE, 15/10/2009)
Capitolo 13
Quinta lezione (Franco
Ligabue, 22/10/2009)
69
70CAPITOLO 13. QUINTA LEZIONE (FRANCO LIGABUE, 22/10/2009)
Capitolo 14
Settima lezione (Franco
Ligabue, 29/10/2009)
71
72CAPITOLO 14. SETTIMA LEZIONE (FRANCO LIGABUE, 29/10/2009)
Capitolo 15
Undicesima lezione (Franco
Ligabue, 12/11/2009)
73
74CAPITOLO 15. UNDICESIMA LEZIONE (FRANCO LIGABUE, 12/11/2009)
Capitolo 16
Tredicesima lezione (Franco
Ligabue, 19/11/2009)
75
76CAPITOLO 16. TREDICESIMA LEZIONE (FRANCO LIGABUE, 19/11/2009)
Capitolo 17
Quindicesima lezione (Franco
Ligabue, 26/11/2009)
77
78CAPITOLO 17. QUINDICESIMA LEZIONE (FRANCO LIGABUE, 26/11/2009)
Capitolo 18
Diciassettesima lezione (Franco
Ligabue, 03/12/2009)
79
80CAPITOLO 18. DICIASSETTESIMA LEZIONE (FRANCO LIGABUE, 03/12/2009)
Capitolo 19
Diciottesima lezione (Franco
Ligabue, 10/12/2009)
81
82CAPITOLO 19. DICIOTTESIMA LEZIONE (FRANCO LIGABUE, 10/12/2009)
Indice
Introduzione
Programma del corso . . . . . . . . . . . . . . . . . . . . . . . . . .
3
3
1 Prima lezione (Giuseppe La Rocca, 08/10/2009)
1.1 Il campo elettrico . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Legge di Coulomb . . . . . . . . . . . . . . . . . . . .
1.1.2 Campo elettrico generato da un filo infinito uniformemente carico . . . . . . . . . . . . . . . . . . . . . . .
1.1.3 Campo elettrico generato da un piano uniformemente
carico . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Flusso di un campo vettoriale. Legge di Gauss. . . . . . . .
1.2.1 Definizione del flusso di un campo vettoriale attraverso
una superficie. . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Proprietá matematiche del flusso attraverso una superficie. . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.3 Legge di Gauss . . . . . . . . . . . . . . . . . . . . .
.
.
5
5
5
.
6
.
.
7
8
.
8
. 9
. 10
2 Seconda lezione (Giuseppe La Rocca, 12/10/2009)
2.1 Forma locale della legge di Gauss . . . . . . . . . . . . . . . .
2.1.1 Esempio di uso della forma locale della legge di Gauss .
2.2 Potenziale elettrico . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Il teorema di Stokes . . . . . . . . . . . . . . . . . . . . . . . .
13
13
15
16
19
3 Quarta lezione (Giuseppe La Rocca, 19/10/2009)
3.1 Energia potenziale di un sistema di cariche . . . . .
3.1.1 Sistemi discreti . . . . . . . . . . . . . . . .
3.1.2 Sistemi continui . . . . . . . . . . . . . . . .
3.1.3 Esclusione dell’autoenergia . . . . . . . . . .
21
21
21
22
23
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Sesta lezione (Giuseppe La Rocca, 26/10/2009)
25
4.1 Conduttori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
83
84
INDICE
4.2
.
.
.
.
.
25
26
27
27
28
5 Ottava lezione (Giuseppe La Rocca, 02/11/2009)
5.1 Riduzione di Poisson a Laplace. . . . . . . . . . . . . . . . . .
5.1.1 Tecnica di separazione delle variabili . . . . . . . . . .
5.2 Approssimazione in serie di funzioni. . . . . . . . . . . . . . .
29
29
30
32
6 Nona lezione(Giuseppe La Rocca, 5/11/2009)
6.1 Armoniche sferiche . . . . . . . . . . . . . . . . . . . . . . .
6.1.1 Studio delle funzioni armoniche in coordinate sferiche
6.1.2 Derivazione dell’equazione di Legendre . . . . . . . .
6.1.3 Polinomi di Legendre . . . . . . . . . . . . . . . . . .
.
.
.
.
35
35
35
37
37
.
.
.
.
.
.
41
41
41
42
43
43
44
4.3
Metodo delle funzioni di Green
4.2.1 Identità di Green . . . .
4.2.2 Condizioni di Dirichlet .
4.2.3 Condizioni di Neumann
Piano . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7 Decima lezione (Giuseppe La Rocca, 09/11/2009)
7.1 Le armoniche sferiche - Caso generale . . . . . . . . .
7.1.1 Ricavare le armoniche sferiche . . . . . . . . .
7.1.2 Proprietá delle armoniche sferiche . . . . . . .
7.1.3 Teorema di addizione per le armoniche sferiche
7.1.4 Esempio: potenziale con cariche localizzate . .
7.1.5 Esempio: potenziale di quadrupolo . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
8 Dodicesima lezione (Giuseppe La Rocca, 16/11/2009)
47
9 Quattordicesima lezione (Giuseppe La Rocca, 23/11/2009)
9.1 Introduzione alle correnti elettriche . . . . . . . . . . . . . . .
9.1.1 Comportamenti macroscopici . . . . . . . . . . . . . .
9.1.2 Modellizzazione microscopica . . . . . . . . . . . . . .
9.1.3 Equazione di continuitá per la carica . . . . . . . . . .
9.2 Il campo magnetico . . . . . . . . . . . . . . . . . . . . . . . .
9.2.1 Vettori veri e vettori falsi . . . . . . . . . . . . . . . . .
9.2.2 Azione del campo magnetico sulle correnti . . . . . . .
9.2.3 Campo magnetico generato da correnti . . . . . . . . .
~ . . . . . . . . . . . . . . . . . . . . . . .
9.3 Carratteristiche di B
9.4 Legge di Biot-Savart . . . . . . . . . . . . . . . . . . . . . . .
49
49
49
50
50
51
51
52
53
53
54
INDICE
85
10 Sedicesima lezione (Giuseppe La Rocca, 30/11/2009)
10.1 Equivalenza tra le equazioni di Maxwell e Biot - Savart. . . .
10.1.1 Biot-Savart implica le equazioni di Maxwell. . . . . .
10.1.2 Le equazioni di Maxwell implicano Biot-Savart. . . .
10.2 Sviluppo in multipoli del poenziale vettore. . . . . . . . . . .
10.2.1 Calcolo del momento di dipolo magnetico per una spira
chiusa . . . . . . . . . . . . . . . . . . . . . . . . . .
57
57
57
59
60
.
.
.
.
. 63
11 Diciannovesima lezione (Giuseppe La Rocca, 14/12/2009)
65
12 Terza lezione (Franco Ligabue, 15/10/2009)
67
13 Quinta lezione (Franco Ligabue, 22/10/2009)
69
14 Settima lezione (Franco Ligabue, 29/10/2009)
71
15 Undicesima lezione (Franco Ligabue, 12/11/2009)
73
16 Tredicesima lezione (Franco Ligabue, 19/11/2009)
75
17 Quindicesima lezione (Franco Ligabue, 26/11/2009)
77
18 Diciassettesima lezione (Franco Ligabue, 03/12/2009)
79
19 Diciottesima lezione (Franco Ligabue, 10/12/2009)
81