MATERIALE DIDATTICO IDONEITA’ ALLA CLASSE 5
TOPOGRAFIA
Indice
RILIEVO PLANIMETRICO
TRIANGOLAZIONI
CANNOCHIALI DISTIANZIMETRICI
ALIDADA
LA LIVELLA
IL GONIOMETRO
LA LENTE
IL FUNZIONAMENTO DELL’OCCHIO UMANO
LENTI DIVERSE
RILIEVO PLANIMETRICO
Il rilievo planimetrico ha lo scopo di dare una descrizione della superficie terrestre,
con tutti gli elementi su di essa presenti, dal punto di vista della sola planimetria,
senza cioè informazioni circa le quote altimetriche dei vari punti sulla mappa.
Eseguire un rilievo altimetrico significa in sostanza individuare una serie più o meno
vasta di punti sul terreno e stabilire una o più relazioni fra di essi; questi punti si
suddividono in due categorie generali:
1) PUNTI DI APPOGGIO;
2) PUNTI DI DETTAGLIO.
I punti di appoggio sono punti ben visibili e accessibili, dai quali si ha una ampia
visuale del terreno circostante. Essi possono essere vertici trigonometrici, e quindi
materializzati da cime di campanili, chiodi o segnali topografici permanenti in
genere; i punti di appoggio sono detti tali in quanto da essi si esegue il rilievo dei
punti di dettaglio.
I punti di dettaglio costituiscono il completamento del rilievo planimetrico, e
vengono rilevati da opportuni punti di appoggio. Il rilievo del dettaglio si esegue
rilevando tutti i punti caratteristici che compaiono sul terreno, tra i quali spigoli di
fabbricati, tombini, pali della luce, rocce particolari, ognuno rappresentato con una
propria semantica.
POLIGONAZIONI
La poligonale è un metodo di collegamento dei punti di appoggio tra i più utilizzati,
sia perché di facile e relativamente veloce esecuzione, sia perché la compensazione
degli errori è semplice e precisa.
Essa consiste nel collegare i punti da rilevare in modo da costituire una spezzata,
detta POLIGONALE, della quale si misurano tutti i lati e tutti gli angoli. Le
poligonali si distinguono in aperte e chiuse, in relazione al fatto che il primo e
l’ultimo vertice coincidano o meno.
In una poligonale chiusa, che in pratica si riduce ad un poligono, se si misurano tutti i
lati e tutti gli angoli, si hanno a disposizione 2n elementi noti, e quindi tre in più di
quelli strettamente necessari; è allora possibile eseguire la compensazione delle
misure.
Per la verifica angolare, se il poligono ha n lati, la somma degli angoli deve essere
(n-2)· p
Se questa condizione non è verificata si ha un errore di chiusura angolare d:
d= S a-(n-2) p
e per la correzione si ripartisce su ogni angolo la quantità
-(d/n) .
Una volta compensati gli angoli si procede alla determinazione delle coordinate
parziali e totali della poligonale stessa. Generalmente si pone l’origine degli assi
coincidente con il primo vertice della poligonale e l’asse delle ascisse secondo il
primo lato.
Per la verifica laterale, le somme algebriche delle coordinate parziali devono essere
nulle, altrimenti si presenta un errore di chiusura laterale in ascissa e in ordinata: ciò
significa che attraverso il calcolo della poligonale il poligono non si chiude; in
sostanza l’ultimo punto non coincide con il primo, ma risulta spostato di una certa
quantità in x e in y. L’errore di chiusura laterale è definito dal segmento d(L), che è
pari a
d(L) = [d(x)²+ d(y)²]½
.
Sia l’errore di chiusura angolare, sia quello laterale si confrontano con le rispettive
tolleranze: per la precisione la tolleranza angolare T(a) si determina con la formula
T(a) = n½c ,
in cui il valore di c è indicato dal catasto italiano. Se risulta d(a) < T(a) si procede alla
suddetta compensazione. Per la tolleranza lineare si ha :
T(d) = 0.025·(Sd)½ .
Analogamente se risulta
d(L) < T(a) si procede alla compensazione lineare ripartendo sulle coordinate parziali
gli errori d(x) e d(y) proporzionalmente alle lunghezze dei lati ; la correzione di una
generica coordinata parziale si calcola, in x e in y con le formule:
[d(x) / Sd]·d(i)
e
- [d(y) / Sd]·d(i).
Le poligonali aperte si distinguono in:
1) poligonali aperte semplici;
2) poligonali aperte ad estremi vincolati.
Analizzeremo in dettaglio la seconda categoria, in quanto la prima ne è un sottocaso.
Analizzeremo in dettaglio la seconda categoria, in quanto la prima ne è un sottocaso.
La poligonale aperta ad estremi vincolati è così chiamata perché il primo e l’ultimo
vertice della poligonale sono “appoggiati” a vertici trigonometrici noti, affinché sia
possibile ed efficace la compensazione.
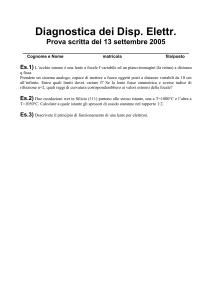
Per il calcolo ci si riferisca alla seguente figura:
Siano n i vertici P1, P2, P3,... ,Pn di una poligonale che collega i vertici
trigonometrici P1 e Pn, di cui ovviamente sono note le coordinate in ascissa e in
ordinata. Dai punti P1 e Pn siano inoltre visibili rispettivamente gli ulteriori vertici
trigonometrici A e B, anch’essi di coordinate note. Inoltre, si siano misurati tutti gli
angoli destrorsi e tutti i lati della poligonale compresi tra P1 e Pn.
Attraverso le coordinate di A e P1 si calcola l’azimut (A P1), e con la tecnica del
trasporto degli azimut si calcolano tutti gli altri azimut della poligonali.
A questo punto si procede alla VERIFICA ANGOLARE nel seguente modo:
L’azimut (Pn, B) è determinabile sia attraverso le coordinate di Pn e B, sia attraverso
il trasporto degli azimut. Se questo azimut risulta differente calcolato nei due modi si
ha un ERRORE DI CHIUSURA ANGOLARE, pari alla differenzaa tra le due
quantità. Se questo errore è minore della tolleranza angolare T(a) si compensa ogni
angolo della quantità -(d/n), laddove n è il numero degli azimut calcolati per
propagazione. Tuttavia, per una maggiore precisione, la compensazione si esegue
proporzionalmente al numero d’ordine dei vertici per tenere conto della propagazione
degli errori. Con gli azimut compensati si calcolano le coordinate parziali dei vertici.
A questo punto si esegue la verifica laterale notando che, come per le poligonali
chiuse, la somma delle coordinate parziali deve essere nulla; diversamente si hanno
gli errori di chiusura laterale in ascissa e in ordinata d(x) e d(y). Si determina l’errore
di chiusura lineare con la formula
d(L) = [d(x)² + d(y)²]½ .
Anche questa quantità si confronta con la tolleranza lineare T(d) e si procede alla
compensazione se risulta T(d)>d(L); la compensazione si esegue con gli stessi criteri
adottati per le poligonali chiuse. A questo punto si calcolano le coordinate totali dei
vertici.
TRIANGOLAZIONI
La triangolazione è un metodo di rilevamento del terreno introdotto dal geodeta
olandese Snellius nel 1617 e consiste nel collegare i punti scelti sul terreno fino a
formare un insieme di triangoli aventi a due a due un lato in comune. Nell’esecuzione
del rilievo è opportuno che i triangoli abbiano forma più equilatera possibile perché è
più agevole la compensazione e perché si copre una superficie maggiore rispetto ad
un triangolo qualsiasi.
Se i triangoli sono collegati fra loro in modo univoco, cioè da un triangolo si passa al
successivo attraverso uno ed un solo lato comune, la triangolazione si dice a catena;
essa è caratterizzata dalla notevole estensione in lunghezza e dalle molteplici forme
articolate che può assumere, sempre in dipendenza dal tipo di rilievo da effettuare. Se
invece da un triangolo si può accedere agli altri triangoli attraverso più vie, la
triangolazione si dice a rete.
Le triangolazioni sono diversamente distinguibili in base alla lunghezza dei lati dei
triangoli; senza entrare nel dettaglio, è sufficiente dire che se la lunghezza dei lati dei
triangoli è superiore a 10 chilometri la triangolazione è di tipo geodetico, e ai vari
triangoli si deve applicare il teorema di Legendre. Le triangolazioni con sviluppo dei
lati minore sono invece di tipo topografico. Apriamo a questo punto una parentesi
relativa alle triangolazioni eseguite dall’IGM per scopi civili e militari: tale istituto ha
eseguito la determinazione dei vertici trigonometrici relativamente al territorio
italiano. In base al criterio di eseguire il rilevamento passando dal generale al
particolare, la triangolazione dell’ IGM è suddivisa in 4 ordini.
La triangolazione di primo ordine è costituita da lati della lunghezza media di 3050 km anche se, in via eccezionale, si sono sviluppati triangoli con lati superiori ai
200 km, ad es. per collegare la Sardegna al continente. I triangoli sono tutti collegati
col sistema a rete. Le basi sono in numero di 8. Gli angoli di quest’ordine sono stati
misurati con teodoliti eseguendo 24 reiterazioni ed ottenendo un errore medio di 0”.5.
La triangolazione di primo ordine costituisce la rete geodetica italiana.
La triangolazione di secondo ordine è costituita da lati della lunghezza media di 2025 km; i vertici sono posti all’incirca nei baricentri dei triangoli di primo ordine; i
triangoli hanno forma equilatera o isoscele secondo che siano ottenuti congiungendo
due vertici di secondo ordine con uno del primo o un vertice del secondo ordine con
due del primo. Gli angoli sono stati misurati eseguendo 12 o 18 reiterazioni ottenendo
un errore medio di circa 1”.
La triangolazione di terzo ordine è costituita da lati della lunghezza media di 10-15
km. Le reiterazioni sono eseguite 6 o 9 volte con un errore medio di circa 2”.
La triangolazione di quarto ordine, costituita da lati della lunghezza media di 5 km,
è stata realizzata come una vera e propria rete di dettaglio, dal momento che con essa
la triangolazione è infittita fino al punto da permettere di passare direttamente a
rilievo di dettaglio.
I vertici dei triangoli, che naturalmente sono i punti di appoggio del rilievo di
dettaglio, vanno scelti in modo tale che siano ben visibili e accessibili.. Torri e
campanili rispondono molto bene a questi requisiti, ma in loro mancanza il punto va
individuato con un segnale permanente che si deve erigere per intero. Ad esempio,
capriate e pilastrini servono a questi scopi.
La triangolazione è una operazione pensata per essere eseguita con il teodolite: le
operazioni di campagna eseguite sono infatti composte dalla misura di tutti gli angoli
del sistema e dalla misura di almeno uno dei lati.
Di seguito tratteremo il metodo di triangolazione più eseguito, ossia quella inserita tra
vertici trigonometrici noti.
Questo tipo di rilievo viene eseguito quando il terreno da rilevare è particolarmente
accidentato ed esteso, ovvero quando è difficoltoso la determinazione dei vertici
trigonometrici; l’ostacolo più comune che può presentarsi è costituito da rilievi
montuosi che rendono inaccessibili i punti trigonometrici.
Si ha quindi difficoltà sia in fase della misurazione degli angoli che in quella delle
distanze.
Questo problema è comunque risolvibile con una normale triangolazione, salvo il
dover determinare degli elementi su cui basare i calcoli.
Innanzi tutto devono essere note le coordinate cartesiane ortogonali dei vertici
estremi del sistema; tali coordinate sono generalmente rilevabili dalle carte del
catasto o dell’IGM.
Come detto lo sviluppo della triangolazione è impossibile perché, qualora fossero
noti tutti gli angoli sarebbe comunque impossibile il rilevamento di elementi lineari
per i suddetti problemi.
Questa difficoltà può essere però sormontata introducendo dei valori equivalenti ai
lati e procedendo nel seguente modo:ad uno dei lati della triangolazione si attribuisce
un valore arbitrario arbitrario, generalmente pari a 1000 metri; a questo punto si
conoscono gli elementi necessari per risolvere il primo triangolo.
Grazie al teorema dei seni è possibile via via la risoluzione di tutta la triangolazione.
Nonostante gli angoli dei vari triangoli abbiano valori reali misurati la misure dei lati
non corrispondono al vero , ma sono comunque proporzionali ai valori reali.
Si ha quindi un modello della triangolazione proporzionale a quello reale.
Non potendo misurare praticamente nessuno degli azimut dei lati si dovrà fare
in modo di attribiurgli dei valori che siano corrispondenti al vero a meno d una
costante.
A tal fine si fisserà un nuovo sistema di assi cartesiani ortogonali avente l’asse delle
ascisse coincidente con uno dei lati del primo triangolo; in questo modo si può porre
un azimut pari ad un angolo retto.
Grazie alla legge della propagazione degli azimut è possibile determinare l’ampiezza
di tutti gli azimut della triangolazione .
I valori ,come detto,non sono quelli veri ma ne differiscono di una quantità “e”,
uguale per tutti, che può essere in eccesso o in difetto.
Si dispone, a questo punto, di azimut e distanze per cui è possibila la determinazione
delle coordinate dei vari vertici della triangolazione; è ovvio che anche questi valori
risulteranno fittizi.
Disponendo, quindi, delle coordinate dell’ultimo punto si confrontano con quelle
reali dello stesso; in questo modo si capisce se la triangolazione fittizia è in
proporzione più grande o più piccola della reale.
A questo punto si calcola la distanza “D’ ” reale tra il primo punto di coordinate reali
e l’ultimo di coordinate fittizie.
Il rapporto “K” tra le due distanze, “D” e “D’ ?, rappresenta il termine di
proporzionalità che lega la triangolazione fittizia a quella reale.
Moltiplicando tutti i lati fittizi per K si ottengono i valori reali sei lati. Avendo
corretto i lati rimangono da determinare i valori reali degli azimut; per fare ciò si
procede nel modo seguente: si calcola l’azimut tra il primo e l’ultimo vertice della
triangolazione con le coordinate reali; si fa lo stesso usando, però, le coordinate
fittizie dell’ultimo vertice.
La differenza “ e” tra i due valori rappresenta la variazione tra gli azimut fittizi e
quelli reali. Se e appare con segno algebrico positivo vuol dire che i primi sono
maggiori dei secondi e dunque gli azimut fittizi risultano più grandi di quelli reali e
pertanto e va detratto dai primi. In caso contrario andrà aggiunto.
Disponendo ora degli azimut e dei lati reali si potranno determinare le coordinate
reali di tutti i vertici della triangolazione.
CANNOCCHIALI DISTANZIOMETRICI
Strumento topografico che permette la misura indiretta della distanza tra due punti
del terreno; la distanza massima misurabile è di circa 600 m. Il distanziometro più
usato è il cannocchiale distanziometrico odiastimometrico, che è un cannocchiale
astronomico dotato di un comune reticolo cui vengono aggiunti due fili orizzontali,
paralleli ed equidistanti rispetto al tratto centrale (reticolo micrometrico
omicrometro). Volendo misurare la distanza tra due punti A e B, in A si pone il
distanziometro e in B una stadia verticale; la distanza (d) è data dalla
relazione d=KS+c, in cui K esprime il rapporto distanziometrico o diastimometrico,
ossia il rapporto tra la distanza focale della lente obiettiva e la distanza tra i fili
estremi del micrometro; S è l'intervallo di stadia visibile tra gli estremi del
micrometro; c è
la
distanza
tra
il fuoco anteriore
dell'obiettivo,
detto
punto anallattico, e il centro del distanziometro. Per eliminarec dalla formula si
aggiunge nel cannocchiale una lente convergenteche sposta il punto anallattico sul
centro dello strumento (cannocchiale centralmente anallattico). In genere si costruisce
lo strumento in modo che K sia uguale a 100, cosicché, essendo la stadia suddivisa in
cm, la lettura S dà direttamente la distanza in metri. Se i punti A e B non sono su un
piano
orizzontale,
la
formula
diventa
sempre
per
un
cannocchiale
anallattico d=KS cos2α in cui αè l'angolo di inclinazione. Il distanziometro a prisma è
costituito, invece, da un cannocchiale con reticolo non micrometrico
, ma dotato di
un prisma ottico, a forma di cuneo, che copre una metà del campo dell'obiettivo: sono
quindi visibili contemporaneamente due immagini di un punto della stadia, di
preferenza orizzontale, quella diretta e quella deviata; dallo spostamento s tra le due
immagini si risale alla distanza d in quanto s è funzione dell'angolo di deviazione del
cuneo, costruito in modo tale che sia tgϖ=s/d=1/100. Pertanto, se si collima una
stadia orizzontale opportunamente graduata e perpendicolare alla linea di mira è
possibile leggere direttamente la distanza tra la stadia e il distanziometro.
Distanziometri
basati
su
tutt'altro
principio
sono
invece
i distanziometri elettromagnetici, strumenti che adottano come unità di misura
la lunghezza d'onda di un'appropriataradiazione: per i distanziometri a microonda,
vedi tellurometro, per i distanziometri otticoelettronici, vedi geodimetro. Particolari
distanziometri sono i telemetri. Per il distanziometro Lodis, vedisquadro.
ALIDADA
Alidada è un termine di origine araba che significa propriamente regolo
dell'astrolabio.E' dotato di traguardi e di indici, serve per individuare la direzione di
una visuale. È collegato con un cerchio graduato rispetto al quale è girevole in un
piano parallelo. Nei moderni goniometri topografici (teodoliti, tacheometri, ecc.),
l'alidada è la parte dello strumento che può ruotare intorno a un asse verticale.
Solitamente è dotata di livelle, microscopi e noni che consentono la lettura su cerchi
graduati, oltre a supporti per il cannocchiale o il collimatore. Nei goniografi l'alidada
è sinonimo di diottra.
LA LIVELLA
La livella a bolla si basa su un principio elementare della fisica: riempiendo un
contenitore di liquido (di solito liquidi volatili come etere o alcool) e lasciandovi una
bolla d'aria all'interno, la bolla si posizionerà sempre nel punto più alto del
contenitore, perché l'aria è meno pesante del liquido. Sfruttando questa proprietà, se
inseriamo del liquido in un contenitore sferico lasciandovi una bolla d'aria, otteniamo
che
la
bolla
si
posiziona
sempre
nel
punto
della sfera più
lontano
dalla superficie terrestre o, meglio, si posiziona sempre ad indicare lo zenit, se si
considera la linea teorica che passa dal centro della sfera per il baricentro della bolla
d'aria.
Se dunque fissiamo la sfera ad un apparecchio che desideriamo stia perfettamente
orizzontale, non dovremmo far altro che muovere l'apparecchio finché la bolla non
sarà nella parte superiore della sfera, che avremmo avuto cura di indicare con un
segno.
Questa è la livella sferica, apparecchio che trova applicazione, in particolare, negli
strumenti topografici, quali il celerimetro o tacheometro, il teodolite e la stazione
totale.
Se desiderassimo una maggiore precisione (si tratta pur sempre di strumenti a lettura
diretta) in una livella che occupa lo stesso spazio fisico, sostituiremmo la sfera con
un toro. Il toro ci permette di avere misure molto più precise, con l'unico
inconveniente che la livella a bolla toroidaleè precisa in una sola direzione, a
differenza della livella sferica che ci da la misura in tutte le direzioni
contemporaneamente. La livella toroidaleviene utilizzata sugli strumenti topografici,
come ausilio alla livella sferica per la messa in bolla dello strumento.
La livella toroidale, o torica, trova applicazione nelle livelle utilizzate nei cantieri
edili: montata su un oggetto che ha un piano liscio può permettere di determinare
facilmente un asse orizzontale o verticale.
Tutte le livelle a bolla amplificano l'errore di lettura. L'errore di posizione di un
decimo di millimetro della bolla d'aria rispetto al riferimento, si ripercuote
amplificato sulla distanza, ad un metro sarà di un millimetro, a dieci metri sarà di un
centimetro.
La livella laser, contrariamente a quanto avviene per la livella sferica e torica, non
serve per determinare se una superficie sia o meno in piano: serve, invece, per
tracciare una linea luminosa che ci permette di capire quali punti di uno spazio chiuso
(o anche aperto, volendo) appartengono allo stesso piano. La livella laser, per essere
messa in piano, utilizza comunque una livella sferica e due toroidali (una per ogni
direzione fondamentale, o una unica orientabile).
La livella laser in genere si compone di un apparecchio rettangolare, montato su
un treppiede, che monta, ad una estremità, un raggio luminoso a elevata intensità.
L'apparecchio è in grado di ruotare autonomamente sull'asse del treppiede, lanciando
a 360° il fascio luminoso.
IL GONIOMETRO
Struttura dei goniometri meccanici
Nella tipologia più semplice è costituito da un cerchio (o un semicerchio) con la
circonferenza graduata e un puntatore sul centro di quest'ultima. Centrando il
puntatore sull'origine dell'angolo, e facendo coincidere lo zero della gradazione su un
lato, si può rilevare il valore dell'angolo leggendo la posizione dell'altro lato lungo la
circonferenza graduata.
I goniometri da ufficio e per il disegno tecnico sono realizzati in plastica trasparente,
onde facilitare la lettura della posizione dei lati attraverso lo strumento stesso. Questi,
pur di scarsa precisione, sono peraltro economici.
I goniometri da officina sono realizzati in materiale più robusto, tipicamente acciaio
inossidabile, onde prevenire che la ruggine renda difficoltosa la lettura o cancelli la
scala. Spesso la superficie viene opacizzata per evitare abbagliamenti durante la
lettura.
Goniometro a bracci
Il goniometro a bracci (chiamato anche goniometro universale) può essere
considerato come una squadra ad apertura variabile, su cui è stato montato un
goniometro sulla cerniera. Un braccio è parte integrante del goniometro, dove è incisa
la scala graduata, l'altro braccio viene incernierato nel centro del goniometro, e
dispone di un indice che punta sulla scala. I bracci così incernierati, posso ruotare
liberamente posizionandosi tra loro ad un angolo qualsiasi. Questi vengono lavorati
accuratamente in modo che abbiano i bordi perfettamente rettilinei.
Quando si deve effettuare una misura, i due bracci vengono posizionati a battuta sulle
due superfici di cui si vuole misurare l'angolo, il rilievo può essere così fatto
leggendo la posizione dell'indice.
LA LENTE
Raramente si prende in considerazione il ruolo svolto dagli strumenti ottici
nell'avvento dell'età contemporanea. Eppure il telescopio è stato determinante
nell'affermazione della concezione copernicana dell'universo, sostenuta da Galileo.
Senza le evidenze portate da questo strumento con le osservazioni dei corpi celesti, il
conflitto fra le concezioni geocentrica e quella eliocentrica avrebbe potuto trascinarsi
all'infinito. Anche il microscopio ha svolto un'analoga funzione rivoluzionaria per la
biologia e la medicina, alle quali ha aperto immensi orizzonti. Prima della comparsa
della macchina fotografica, le descrizioni del mondo erano prodotte solo da artisti. Si
trattava di rappresentazioni pregevoli, nelle quali tuttavia la soggettività dell'artista
alterava la realtà. La macchina fotografica ha introdotto un modo molto più crudo di
osservare il mondo, ma assai più oggettivo.
Già da queste brevi considerazioni si può intuire quanto grande sia stato il ruolo
svolto dagli strumenti ottici nel costituirsi del mondo che conosciamo. Questi
strumenti sono perfettamente adatti al modo moderno e disincantato di osservare la
realtà, ma come funzionano? Oggi ci troviamo in continuo contatto con strumenti
ottici e con i loro prodotti. Capire le proprietà delle lenti è fondamentale per
familiarizzare con questi apparecchi, per usarli dunque con più disinvoltura, per saper
utilizzare le lenti in modo creativo, progettando strumenti originali. Ciò è appunto
quanto ci apprestiamo a fare con le prossime puntate e per questo è necessario
possedere alcuni concetti fondamentali di ottica.
Non è facile comprendere il funzionamento di una lente attraverso le complicate
descrizioni teoriche di un testo di fisica. Con alcune semplici esperimenti è invece
possibile superare molti ostacoli astratti. A questo punto, il ritorno al testo di fisica si
rivelerà molto più semplice e produttivo.
Vi sono due tipi fondamentali di lenti, quelle convergenti e quelle divergenti. Le lenti
convergenti sono in grado di far convergere la luce del Sole fino a formare un
dischetto luminosissimo che è l'immagine della nostra stella, mentre quelle
divergenti fanno divergere il fascio luminoso proveniente dal Sole e quindi la sua
immagine non si forma. Qui ci occuperemo solo di quelle convergenti, più
importanti. I primi esperimenti che compiremo questa volta sono intesi a far
conoscere le proprietà fondamentali delle lenti convergenti. L'ultimo esperimento, per
mezzo dell'uso combinato di due lenti, mostrerà il funzionamento di alcuni importanti
strumenti
ottici
quali
il
cannocchiale
e
il
microscopio
composto.
Una lente convergente può quindi essere utilizzata in due modi principali: come lente
che produce immagini e come lente di ingrandimento.
FUNZIONAMENTO DELL’OCCHIO UMANO
Nell’ell'uomo l'occhio ha consistenza dura ed elastica; è tenuto in posto, oltre che dai
muscoli, da fasce, nervi e vasi che in esso penetrano. Nella parte anteriore l'occhio
presenta esternamente la cornea, che è trasparente, nel cui centro sono visibili l'iride,
variamente colorata da individuo a individuo, e la pupilla, il foro attraverso cui
vengono recepite le immagini e che si dilata o si restringe a seconda della minore o
maggiore intensità degli stimoli luminosi. La parte posteriore è formata dalla sclera,
di colore biancastro, da cui emerge il nervo ottico.L’occhio è avvolto da tre tuniche
che hanno strutture e funzioni assai diverse. La tunica più esterna, detta fibrosa, è
costituita dalla sclerotica o sclera e dalla cornea, quella media è detta vascolare ed è
fortemente pigmentata per impedire la riflessione e la rifrazione dei raggi luminosi.
Quest'ultima è divisa in più porzioni, di cui una posteriore, sottilissima e aderente alla
superficie della sclera, detta coroide, principalmente vascolare, una intermedia
(corpo
ciliare)
e
una
anteriore,
l'iride,
con
alcentrola pupilla.
- La tunica più interna è di natura nervosa, aderente a quella media; può esser distinta
in una porzione ottica (corrispondente alla coroide) e in una porzione cieca, formata
da due part i,unaciliare, l'altra iridea. Il limite tra le due porzioni è segnato da una
linea festonata, detta ora serrata. Questa terza tunica, nella sua porzione ottica, risulta
costituita da due foglietti, uno esterno o strato pigmentato e uno interno, laretina,
considerata un'espansione del nervo ottico, che, come una membrana, si applica sulla
coroide, fino all'ora serrata. Il nucleo dell'occhio è formato da materiali liquidi e da
organelli strutturali: procedendo dall'avanti all'indietro il bulbo oculare presenta le
camere dell'occhio, il cristallino e il corpo vitreo. Le due camere consistono in uno
spazio cavo contenente l'umor acqueo, liquido incolore e trasparente; tale spazio è
distinto in camera anteriore, delimitata in avanti dalla faccia posteriore della cornea e
indietro dalla faccia anteriore dell'iride e del cristallino, e nella più piccola camera
posteriore (in comunicazione con la prima tramite la pupilla), confinante
anteriormente con l'iride e posteriormente con il cristallino, il corpo vitreo e il corpo
ciliare.
Il corpo vitreo consiste in una massa trasparente e gelatinosa che riempie lo spazio
esistente tra la faccia posteriore della lente cristallina e la membrana interna del globo
oculare; tale massa è detta umor vitreo, un liquido gelatinoso formato da sostanza
amorfa, fibre e cellule, tenuta assieme dalla membrana ialoidea; il corpo vitreo è
attraversato nel suo diametro antero-posteriore dal canale ialoideo che corre dalla
papilla del nervo ottico all'incavatura (fossa ialoidea), la quale accoglie
anteriormente.
Tra gli annessi oculari di maggior importanza sono i muscoli dell'occhio, retti
(mediale, laterale, superiore, inferiore) e obliqui (superiore e inferiore) che
provvedono ai movimenti del bulbo oculare, i primi esercitando un'azione di
ritrazione, i secondi invece di protrazione. L'irrorazione dell'occhio è garantita da
rami dell'arteria oftalmica (arteria centrale della retina, arterie ciliari, ecc.), mentre il
sangue refluo (tramite le vene ciliari, le vene vorticose e il seno venoso della sclera)
si scarica nelle vene oftalmiche. L'innervazione del globo oculare è fornita dai nervi
ciliari lunghi e brevi (provenienti dal ramo nasociliare dell'oftalmico e dal ganglio
nervoso ciliare), che contengono fibre recettrici e fibre vegetative simpatiche.
Dall'occhio
si
dipartono
le
fibre
che
costituiscono
il
nervo
ottico.
L’occhio funziona come una macchina fotografica che possiede lenti, diaframma e
pellicola. La cornea ed ilcristallino sono le lenti che formano l'obiettivo. Fra di esse
si trova l’iride (diaframma) colorata a seconda degli individui in modo diverso. Al
centro dell'iride si trova la pupilla, in grado di stringersi ed allargarsi a seconda
dell'illuminazione ambientale. Grazie a cornea e cristallino (lenti), l'immagine va a
fuoco in modo nitido sulla retina (pellicola): quest'ultima riveste internamente la
parte posteriore dell'occhio, il quale è riempito da una sostanza gelatinosa chiamata
"corpo vitreo". La luce attraversa cornea, pupilla, cristallino e vitreo e va a colpire la
retina, generando gli stimoli visivi. Gli stimoli visivi vengono trasformati in impulsi
elettrici, e trasportati attraverso il nervo ottico sino al cervello, che li interpreta dando
formaalleimmagini.
Qualora siano presenti delle alterazioni che coinvolgano una di queste strutture, si
avrà una imperfetta percezione delle immagini.
LENTI DIVERSE
Il tipo più comune è rappresentato dalle lenti sferiche, caratterizzate dall'avere le due
superfici
opposte
costituite
idealmente
da
porzioni
di
unasfera di
dato raggio, R1 ed R2. Ciascuno di questi parametri è il raggio di curvatura della
corrispondente superficie.
Il segno di R1 determina la forma della superficie: se R1 è positivo la superficie
è convessa, se negativa la superficie è concava, se R1 è infinito la superficie ha
curvatura zero, ovvero è piatta.
Lo stesso vale per la superficie opposta lungo il cammino ottico, ma con i segni
invertiti.
La linea passante per i centri delle sfere ideali e generalmente passante anche per il
centro geometrico della lente è detto asse.
Le lenti sono classificate secondo la curvatura delle due superfici:
biconvessa o semplicemente convessa se entrambe sono convesse,
biconcava o concava se entrambe sono concave,
piano-convessa se una è piatta e l'altra convessa,
piano-concava se una è piatta l'altra è concava,
concavo-convessa se sono una concava ed una convessa.
Nell'ultimo caso, se le superfici hanno uguale raggio la lente si definisce menisco,
anche se il termine è a volte usato per indicare una generica lente concavo-convessa.
Se la lente è biconvessa o piano-convessa un fascio di luce collimato o parallelo
all'asse che attraversa la lente viene fatto convergere (ofocalizzare) su un punto
dell'asse, ad una certa distanza oltre la lente nota come distanza focale. Questo tipo di
lente è detta positiva.
Se la lente è biconcava o piano-concava, un fascio collimato è fatto divergere e la
lente è perciò detta negativa.
Il raggio uscente dalla lente sembra provenire da un punto dell'asse antecedente la
lente. Anche questa distanza è chiamata distanza focale, ma il suo valore è negativo
rispetto ad una lente convergente.
Nella lente concavo-convessa, la convergenza o divergenza è determinata dalla
differenza di curvatura delle due superfici. Se i raggi sono uguali il fascio luminoso
non converge né diverge.
Il valore della distanza focale può essere calcolato con l'equazione:
dove:
n è l'indice di rifrazione del materiale con cui è costituita la lente,
n' è l'indice di rifrazione dell'ambiente in cui la lente è immersa,
d è la distanza tra le due superfici o spessore della lente.
Se d è piccolo rispetto a R1 e R2, si ha la condizione di lente sottile e f con buona
approssimazione dato da:
Il valore di f è positivo per le lenti convergenti, negativo per le divergenti e
infinito per le lenti a menisco.
L'inverso della distanza focale (1/f) è detto potere diottrico, è espresso
in diottrie con dimensioni metri−.
Le lenti sono reversibili, ovvero le distanze focali sono le stesse sia che la
luce le attraversi in un senso sia nell'altro (alcune particolari proprietà come
le aberrazioni non sono reversibili).