MACCHINA SINCRONA TRIFASE
+
+
+
+
+
+
+ +
+
+
+ +
+
+
+
+
+
+
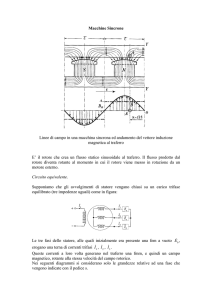
L’avvolgimento di eccitazione, percorso dalla corrente continua ie, crea
una f.m.m. al traferro e quindi un campo magnetico in modo tale che si
possono distinguere successivamente un “polo nord” (flusso “uscente”
dal polo) e un “polo sud” (flusso “entrante” nel polo).
Macchine elettriche
1
La distanza fra l’asse di un polo nord e di un polo sud misurata al
traferro è pari al passo polare τ la cui espressione è la seguente, dove
R è il raggio interno dello statore e p il numero i coppie di poli
dell’avvolgimento:
τ=
πR
p
L’andamento spaziale del campo di eccitazione lungo la
periferia del traferro risulta sinusoidale, a meno di
armoniche superiori che è possibile trascurare in prima
approssimazione. Nella macchina a poli lisci ciò viene
ottenuto distribuendo opportunamente le cave o la
corrente al traferro, nella macchina a poli salienti,
sagomando le espansioni polari.
Macchine elettriche
2
1
La legge di variazione utilizzata per il traferro sotto le
espansioni polari è δ = δ0/cos(pα), essendo p il numero di
coppie polari. Al di fuori delle espansioni polari il traferro
assume valori estremamente elevati.
δ0
α
δ
Macchine elettriche
3
Quando si pone in rotazione il rotore alla velocità angolare
costante ωm, il campo di eccitazione, solidale col rotore, ruota al
traferro alla velocità ωc = ωm. Il campo rotante così prodotto
induce nell’avvolgimento trifase che è alloggiato nelle cave di
statore un sistema trifase simmetrico di f.e.m., sinusoidali nel
tempo con pulsazione ω data dalla seguente relazione:
ω = p ωm
Se lo statore alimenta un carico equilibrato, esso diventa sede di tre
correnti di pulsazione ω che producono un campo rotante statorico.
Inoltre, se il numero di coppie polari dello statore è uguale al numero di
coppie polari del rotore, il campo rotante statorico ruota con velocità
angolare ωc = ω/p = ωm. Il campo rotante statorico risulta dunque
immobile rispetto al campo rotante rotorico e quindi il campo
risultante ruota al traferro con la velocità del rotore, da cui il nome
di macchina sincrona.
Macchine elettriche
4
2
Nel funzionamento descritto, la potenza meccanica fornita all’albero della
macchina per vincere la resistenza della coppia elettromagnetica dovuta
allo sfasamento fra campo statorico e campo rotorico, viene trasformata, a
meno delle perdite interne della macchina, in potenza elettrica ceduta al
carico collegato allo statore. La macchina funziona quindi da generatore e
viene chiamata alternatore.
Per alimentare l’avvolgimento di rotore viene utilizzata una sorgente
esterna che viene collegata mediante un collettore ad anelli. Per potenze
elevate vengono impiegate delle eccitatrici senza spazzole, costituite da
una macchina sincrona, con il circuito di eccitazione montato sullo
statore ed il circuito d’armatura montato sull’albero del rotore. L’uscita
trifase del generatore di eccitazione viene raddrizzata tramite un
raddrizzatore trifase pure montato sull’albero.
Macchine elettriche
5
MACCHINA
SINCRONA
ECCITATRICE
Raddrizzatore
Trifase
ROTORE
STATORE
Raddrizzatore
Trifase
Sincro 1.gif
Macchine elettriche
6
3
Spesso il sistema viene dotato di una piccola eccitatrice pilota. Questa è
un piccolo generatore a corrente alternata, dotato di magneti permanenti,
montato sul rotore. L’uscita del circuito di armatura dell’eccitatrice
pilota (sullo statore) viene raddrizzata ed utilizzata per alimentare il
circuito di eccitazione dell’eccitatrice. L’uscita del circuito di armatura
dell’eccitatrice (sul rotore) viene raddrizzata ed utilizzata per alimentare
il circuito di campo della macchina principale.
Eccitatrice
Pilota
ROTORE
STATORE
MACCHINA
SINCRONA
Eccitatrice
Raddriz
zatore
Magneti
Permanenti
Raddriz
zatore
Macchine elettriche
7
Si consideri una macchina sincrona a poli lisci (macchina isotropa)
che funzioni con una velocità di rotazione costante ωm e si
suppongano valide le ipotesi di campo illustrate nel capitolo relativo
al campo rotante. In particolare quindi si suppone che la macchina
funzioni in assenza di saturazione del materiale ferromagnetico
(macchina non satura). L’avvolgimento di eccitazione, alimentato
con la tensione costante ve è percorso dalla corrente costante ie.
Seguendo un procedimento già illustrato per il trasformatore e la
macchina asincrona, l’applicazione della legge della induzione
elettromagnetica all’avvolgimento di eccitazione porta a scrivere la
seguente equazione dove Re è la resistenza elettrica
dell’avvolgimento.
ve = Re ie
Macchine elettriche
(14.1)
8
4
L’avvolgimento di statore è percorso da una terna equilibrata di
correnti con pulsazione ω. Il campo magnetico principale varia
sinusoidalmente lungo la periferia del traferro e ruota alla stessa
velocità del rotore. Il flusso Φ della induzione magnetica che si
concatena con la spira centrale della prima fase di statore varia
quindi nel tempo con legge sinusoidale con pulsazione ω.
I1
1
2
3
I2
O
V = − ( R + jωLd ) I − jω
I3
N
ka Φ
2
(14.2)
Macchine elettriche
9
La relazione tra correnti di statore e di rotore e flusso principale, si
ottiene ricordando che in ogni punto del traferro il prodotto del
valore del campo magnetico e dello spessore del traferro, nelle
ipotesi di campo adottate, risulta pari alla f.m.m. risultante.
Quest’ultima è la somma della f.m.m. di statore (o di armatura,
indicata con Fa) e della f.m.m di rotore (o di eccitazione, indicata
con Fe). Pertanto, l’espressione dell’equazione di accoppiamento
magnetico delle fasi di statore e di rotore, avendo preso l’origine del
sistema di riferimento nell’osservatore centrale della fase di statore,
risulta:
(14.3)
F a + F e = Rt Φ
Rt
=
πδ
2τµ0l
Fa =
3Nka
I
2 pπ
N = 2pqn
Macchine elettriche
10
5
La f.m.m. di eccitazione Fe ruota alla velocità del rotore, come la
f.m.m. di statore. In ogni punto del traferro è una funzione
sinusoidale del tempo con pulsazione ω; sia β l’angolo di fase di tale
grandezza. Indicando con kae il fattore di avvolgimento
dell’avvolgimento di eccitazione e con Ne il numero totale di
conduttori attivi risulta, in valore efficace:
Fe =
2 N e kaeie jβ
e
2 pπ
l’espressione dell’equazione di accoppiamento magnetico delle
fasi di statore e di rotore risulta allora:
3Nka
2 N e kaeie jβ
πδ
e =
I+
Φ
2 pπ
2 pπ
2µ 0l τ
(14.4)
Macchine elettriche
11
Essendo la macchina non satura vale il principio di sovrapposizione
degli effetti ed è quindi possibile separare la parte del flusso principale
associata alla corrente di eccitazione (Φe) da quella associata alla
reazione di armatura (Φa).
Φ = Φe + Φa
Risulta:
3Nka
πδ
I=
Φa
2 pπ
2µ0l τ
⇒ Φa =
3Nkaµ0l τ
I
pδπ2
(14.5)
che mette in evidenza come la reazione di armatura sia descrivibile
semplicemente mediante un coefficiente di autoinduzione fittizio della
fase di statore considerata.
Macchine elettriche
12
6
Vengono perciò definite la reattanza di reazione Xr, la reattanza
sincrona Xs e la impedenza sincrona Zs della macchina a poli lisci
non satura, tramite le seguenti relazioni:
3N 2 ka2µ0l τ
2 pδπ2
X s = ωLd + X r
X r= ω
(14.6)
Z s = R + jX s
Con le posizioni fatte l’equazione (14.2) diviene:
N
N
ka Φ = − ( R + jωLd ) I − jω ka ( Φ a + Φ e ) =
2
2
N
N
= − ( R + j ( ωLd + X r ) ) I − jω ka Φ e = − ( R + jX s ) I − jω ka Φ e
2
2
N
= − Z s I − jω k a Φ e = − Z s I + E 0
(14.7)
2
V = − ( R + jωLd ) I − jω
Macchine elettriche
13
Per il flusso di eccitazione vale la seguente equazione:
2 N e kaeie jβ
πδ
e =
Φe
2 pπ
2µ 0l τ
⇒ N e kaeie e jβ = R Φ e
(14.8)
Le equazioni interne della macchina sincrona a poli lisci
non satura sono quindi le (14.1), (14.7) e (14.8), a cui va
aggiunta l’epressione che fornisce la relazione tra
pulsazione di statore e velocità di rotazione del rotore. E’
da notare che l’impedenza sincrona della macchina può
essere misurata sperimentalmente mediante una prova a
vuoto ed una in corto circuito.
Macchine elettriche
14
7
La prova a vuoto di una macchina sincrona consiste nel fare ruotare
la macchina alla velocità di regime, lasciando i morsetti di indotto
aperti. Viene quindi misurata la tensione concatenata di statore in
corrispondenza a diversi valori della corrente di eccitazione. Viene
poi tracciata la curva di magnetizzazione (caratteristica a vuoto)
che fornisce la tensione ai morsetti di statore in funzione della
corrente di eccitazione. A causa della saturazione del materiale
ferromagnetico la curva non è rettilinea.
E0
ie
Macchine elettriche
15
La prova in cortocircuito di una macchina sincrona consiste nel fare
ruotare la macchina alla velocità di regime, con i morsetti di indotto in
cortocircuito. Viene quindi misurata la corrente in ciascuna fase di
statore in corrispondenza a diversi valori della corrente di eccitazione.
Viene poi tracciata la caratteristica di cortocircuito
Ic
Dalla conoscenza della caratteristica
a vuoto (il tratto lineare) ed in
cortocircuito si ottiene l’impedenza
sincrona, mediante la seguente
relazione:
Zs =
ie
Macchine elettriche
E0
Ic
16
8
Nelle equazioni interne compaiono le seguenti grandezze incognite:
ve, ie, V, I, β, Φe, ω, ωm . La fase di una delle variabili complesse V
ed I è arbitraria e quindi può essere presa nulla. Per individuare
univocamente il funzionamento della macchina sincrona è necessario
conoscere come la stessa è collegata con l’esterno. Ad esempio, se la
macchina viene portata in rotazione ad una velocità ωm0 da un motore
primo con l’avvolgimento di eccitazione alimentato con la tensione
ve0 e lo statore è chiuso su di una stella di impedenze, ciascuna di
valore ZL, le equazioni di collegamento con l’esterno sono le
seguenti:
ωm = ωm 0
ve = ve 0
V = ZL I
Macchine elettriche
17
La figura mostra il circuito equivalente di ciascuna fase di statore. La legge di Kirchhoff
delle tensioni per tale circuito risulta infatti coincidente con l’equazione interna (14.7).
Nella figura sono state indicate sia la reattanza di reazione che la reattanza di
dispersione. La reattanza sincrona è data dalla loro serie. E’ da notare che la f.e.m. E0 è
regolabile a piacere variando la corrente di eccitazione oppure variando la velocità
angolare del rotore. In quest’ultimo caso però si modifica anche la pulsazione della
f.e.m. e della corrente e quindi anche la reattanza sincrona della macchina.
Xd
R
I
+
Xr
E
V
E0
−
Macchine elettriche
18
9
Si consideri la macchina che funziona da generatore e si supponga per
semplicità che le fasi di statore siano collegate a stella e che pure a stella
siano collegate le tre fasi del carico. Siano V ed f, rispettivamente il valore
efficace e la frequenza della tensione di fase con cui deve essere alimentato
il carico della macchina. Siano inoltre I e cosϕ rispettivamente il valore
efficace della corrente di fase assorbita ed il fattore di potenza del carico in
corrispondenza ai valori di tensione e frequenza sopra menzionati. Il
calcolo della velocità di rotazione e della corrente di eccitazione necessari
per alimentare correttamente il carico risulta in questo caso particolarmente
semplice, in quanto si può condurre usando le equazioni della macchina
consecutivamente, senza che sia necessaria alcuna manipolazione algebrica
del sistema. La velocità di rotazione viene calcolata dal valore della
frequenza tramite la relazione. La soluzione può essere visualizzata, man
mano che si calcolano le varie grandezze, con una rappresentazione
vettoriale sul piano complesso, detta diagramma di Behn-Eshemburg
Macchine elettriche
19
j Xr I
Zs I
j Xd I
E0
E
RI
Fa
V
F
Fe
δ
ϕ
ψ
I
Viene definito “angolo di reazione” ψ lo sfasamento tra la corrente I e la tensione di
fase a vuoto E0. L’angolo ψ e può assumere tutti i valori da 0 a 2π in dipendenza dalle
caratteristiche del carico e dalla struttura fisica della macchina (si noti che, per
definizione, ψ = ϕ + δ). Poiché la f.m.m. di eccitazione è in quadratura anticipo rispetto
alla tensione di fase a vuoto e la f.m.m. di armatura è in fase con la corrente, la Fe è
sfasata in anticipo di ψ+π/2 rispetto a Fa.
Macchine elettriche
20
10
Quando il generatore sincrono alimenta un carico puramente resistivo
la tensione V è in fase con la corrente I (cioè ϕ = 0). La f.m.m. di
armatura risulta quindi in ritardo rispetto a quella di eccitazione di un
angolo pari a δ + π/2. Il valore efficace della tensione V risulta minore
del valore efficace della tensione a vuoto E0 Trascurando l’angolo δ
risulta ψ = 0 e dunque la f.m.m. di armatura risulta in quadratura in
ritardo rispetto a quella di eccitazione,
Fa
Fa
S
N
Fe
S
E0
j Xs I
N
Fe
N
δ
I
V
RI
Trascurando l’angolo δ la posizione relativa delle ruote polari di statore e di rotore risulta quella
mostrata. L’asse polare di statore risulta affacciato all’asse interpolare di rotore. I poli indotti
occupano i vani intrapolari dei poli induttori. Il campo indotto agisce come un campo trasverso,
per cui la reazione d’indotto è detta reazione trasversa. L’insieme delle forze tangenziali che si
sviluppano dà luogo ad una coppia resistente, contro la quale il rotore deve opporre una coppia
motrice. Quindi l’energia meccanica del rotore viene trasformata in energia elettrica.
Macchine elettriche
21
Quando il generatore sincrono alimenta un carico puramente induttivo
la tensione V è in quadratura anticipo rispetto alla corrente I, ne
consegue che la f.m.m. di armatura risulta in ritardo rispetto a quella
di eccitazione di un angolo pari a π + δ. Trascurando l’angolo δ (che
in questo caso risulta negativo) risulta ψ = π e dunque la posizione
relativa delle ruote polari di statore e di rotore risulta quella mostrata
nella figura
Fe
Fe
Fa
N
S
N
N
S
N
Fa
V
I
δ
RI
E0
j Xs I
L’asse polare di statore risulta affacciato all’asse polare di rotore con i poli omonimi
affacciati: i poli indotti si contrappongono esattamente ai poli induttori. Le due onde di f.m.m.
sono in opposizione di fase e si ha quindi il massimo effetto smagnetizzante (V risulta minore
della tensione a vuoto E0). Le forze che si sviluppano sono di repulsione e agiscono
ortogonalmente al moto, per cui non esiste alcuna coppia resistente e non viene assorbita
potenza meccanica. La reazione d’indotto è propriamente detta reazione diretta. La macchina
si comporta quindi come un trasformatore rotante.
Macchine elettriche
22
11
Quando il generatore sincrono alimenta un carico puramente capacitivo la
tensione V è in quadratura ritardo rispetto alla corrente I, ne consegue che
la f.m.m. di armatura risulta in ritardo rispetto a quella di eccitazione di
un angolo pari a δ. Trascurando tale angolo risulta ψ = −π/2 e dunque la
posizione relativa delle ruote polari di statore e di rotore risulta quella
mostrata nella figura
I
Fe
S
Fa
N
N
S
S
j Xs I
Fa
E0
N
Fe
RI
δ
V
L’asse polare di statore risulta affacciato all’asse polare di rotore con i poli opposti
affacciati: i poli indotti sono direttamente affacciati ai poli induttori di nome contrario.
Le due onde di f.m.m. sono in fase e si ha quindi il massimo effetto magnetizzante (V
risulta maggiore della tensione a vuoto E0). Le forze che si sviluppano sono di
attrazione e agiscono ortogonalmente al moto, per cui non esiste alcuna coppia
resistente e non viene assorbita potenza meccanica. La reazione d’indotto è detta
reazione diretta.
Macchine elettriche
23
Se il materiale ferromagnetico è saturo, almeno in alcune regioni,
non è più possibile distinguere tra il flusso di eccitazione ed il flusso
di armatura. Di conseguenza non è più possibile caratterizzare la
macchina per mezzo della impedenza sincrona. Risulta invece in
ogni caso possibile definire il flusso disperso, in quanto
quest’ultimo è associato a linee di campo che si svolgono per la
maggior parte del loro tragitto nell’aria del traferro e quindi non
viene modificato significativamente dall’insorgere della saturazione
del ferro.
Il calcolo della corrente di eccitazione necessaria per alimentare
un carico caratterizzato dal valore V della tensione, I della
corrente e cos(ϕ) del fattore di potenza, può venire eseguito
mediante il diagramma di Potier, e della caratteristica a vuoto.
Macchine elettriche
24
12
Ottenuto il fasore E rappresentativo della f.e.m. indotta dal flusso totale, come per la
macchina non satura, il fasore della corrispondente f.m.m. F risulta in quadratura anticipo
rispetto ad esso ed il suo modulo, in una opportuna scala, può essere calcolato dalla
caratteristica a vuoto. Essendo nota la corrente di armatura è pure nota la f.m.m Fa, in fase
con essa, e quindi, si può calcolare come differenza vettoriale di F ed Fa la f.m.m. di
eccitazione Fe. Noto il modulo di quest’ultima si può calcolare, mediante la caratteristica a
vuoto il modulo della tensione a vuoto E0 che risulta in quadratura ritardo rispetto ad Fe.
E0
E
E0
j Xd I
E
Fa
RI
V
F
Fe
ϕ
F
I
Fe
Macchine elettriche
25
Il valore della coppia di origine elettromagnetica che agisce
sull’avvolgimento di rotore può essere ricavata dalla sua espressione in
funzione della coenergia magnetica, con un procedimento analogo a
quello illustrato nel caso della macchina asincrona. E’ possibile ottenere
una buona approssimazione della coppia elettromagnetica, considerando
il bilancio energetico della macchina sincrona e trascurando le perdite
nel ferro e nel rame di statore. In tal caso infatti, visto che la potenza
elettrica assorbita dal rotore viene interamente dissipata per effetto Joule
nell’avvolgimento di rotore, tutta l’energia elettrica assorbita in un
periodo dall’avvolgimento di statore, viene trasformata in energia
meccanica erogata all’albero.
Risulta quindi:
Ce = −
3VIcos ( ϕ )
p
= −3 VIcos ( ϕ )
ωm
ω
Macchine elettriche
26
13
Dal diagramma Behn-Eshemburg, trascurando la resistenza
rotorica si ha:
V cos ( ϕ ) = E0 cos ( ϕ + δ )
V sen ( δ ) = X s I cos ( ϕ + δ )
per cui:
Ce = −3
p VE0
sin ( δ )
ω Xs
(14.9)
Lo sfasamento δ della tensione a vuoto E0 rispetto alla tensione V viene
chiamato “angolo di carico” corrispondente alla condizione di
funzionamento considerata.
Macchine elettriche
27
Quando l’angolo di carico è positivo (E0 in anticipo rispetto a
V), la coppia risulta negativa, cioè la macchina assorbe
potenza meccanica ed eroga potenza elettrica attiva alla rete
trifase (funzionamento da generatore). Quando l’angolo di
carico è negativo (E0 in ritardo rispetto a V), la coppia è
positiva, cioè la macchina eroga potenza meccanica ed assorbe
potenza elettrica attiva dalla rete trifase (funzionamento da
motore). Quando l’angolo di carico è nullo (E0 in fase con V),
la coppia è nulla, cioè la macchina non scambia né potenza
meccanica né potenza elettrica attiva, può però scambiare
potenza elettrica reattiva con la rete trifase; si dice allora che la
macchina funziona da compensatore sincrono.
Macchine elettriche
28
14
Volendo tenere conto delle perdite è possibile ottenere il bilancio
energetico della macchina sincrona a partire dalla (14.7), scritta
nella forma
E0 = Z s I + V
Moltiplicando ambo i membri per il coniugato della corrente si
ottiene un bilancio di potenza:
2
E0 I* = Z s I + VI*
uguagliando le parti reali dei due membri, si deduce un bilancio di potenza
attiva chiaramente interpretabile dal punto di vista fisico: ℜ(VI*)
rappresenta infatti la potenza attiva erogata all’utilizzatore; RI2 la potenza
dissipata per effetto Joule in una fase di statore; ℜ(E0I*) rappresenta, in
quanto somma delle precedenti potenze, la potenza meccanica fornita alla
macchina per ogni fase.
Macchine elettriche
29
Moltiplicando tale potenza per il numero di fasi e dividendola per la
velocità angolare del rotore (ω/p), si ottiene l’espressione della coppia
motrice C (uguale ed opposta alla coppia elettromagnetica Ce):
p
Ce = −3 ℜ ( E 0 I * )
ω
Sostituendo il valore di I ottenuto dalla (14.7) ed introducendo gli argomenti
dei numeri complessi che vi figurano (Zs = Zs ejα, δ = arg(E0) −arg(V)), risulta:
⎞
EV
p ⎛ E2 E V*⎞
p ⎛ E2
Ce = −3 ℜ ⎜ 0 − 0 ⎟ = 3 ℜ ⎜ 0 e jα − 0 e j ( α+δ ) ⎟
ω ⎝ Z s* Z s* ⎠
ω ⎝ Zs
Zs
⎠
Macchine elettriche
30
15
Calcolando infine la parte reale, si ha:
⎞
EV
p ⎛ E2
Ce = −3 ⎜ 0 cos ( α ) − 0 cos ( α + δ ) ⎟
ω ⎝ Zs
Zs
⎠
(14.10)
Dalla (14.10) si deduce la (14.9), trascurando la
resistenza interna di statore. Infatti, se R << Xs
risulta cos α ≅ 0 e quindi α ≅ π/2. Sostituendo tale
valore nella (14.10) si ottiene la (14.9).
Macchine elettriche
31
In una macchina a poli salienti, lo spessore del traferro varia
considerevolmente spostandosi sulla periferia del traferro stesso. In
particolare, lo spessore del traferro risulta molto più piccolo in
corrispondenza delle espansioni polari del rotore, rispetto alla
regione interpolare. Ne consegue che, a parte il caso in cui le f.m.m.
statoriche e rotoriche sono in fase tra di loro, il circuito magnetico
su cui agisce la f.m.m. rotorica ha caratteristiche (geometriche)
diverse da quello su cui agisce la f.m.m. statorica. La reattanza di
reazione Xr definita per la macchina a poli lisci, assume un valore
diverso a seconda dello sfasamento fra le f.m.m. statorica e rotorica.
Tale sfasamento dipende dal regime di funzionamento considerato;
ad esempio dipende dal carico che la macchina, operante come
generatore, alimenta.
Macchine elettriche
32
16
Per potere descrivere il comportamento elettrico della macchina
sincrona a poli salienti è necessario scomporre la f.m.m. statorica (Fa)
nelle sue due componenti: Fad in fase con la f.m.m rotorica, e quindi
agente nella direzione dell’asse polare (asse diretto), ed Faq agente
lungo l’asse interpolare (asse in quadratura), e quindi sfasata di 90°
elettrici (mezzo passo polare) rispetto ad Fad.
asse in quadratura
asse diretto
+ +
+ +
Macchine elettriche
33
Con una opportuna scelta dell’origine del sistema di riferimento,
indicando con xd0 e xq0 le coordinate dell’asse diretto e dell’asse in
quadratura all’istante t = 0, risulta xd0 − xq0 = τ/2. Considerando solo la
prima armonica della f.m.m. al traferro, risulta:
3ka NI M
π
cos ⎛⎜ x − ωt ⎞⎟ = Fad ( x, t ) + Faq ( x, t )
2 pπ
⎝τ
⎠
3ka NI M
π
π
Fad ( x, t ) =
cos ⎛⎜ xd 0 ⎞⎟ cos ⎡⎢ ( x − xd 0 ) − ωt ⎤⎥
2 pπ
τ
⎝
⎠
⎣τ
⎦
3ka NI M
π
π
⎛
⎞
⎡
⎤
Faq ( x, t ) =
cos ⎜ xq0 ⎟ cos ⎢ ( x − xq 0 ) − ωt ⎥
2 pπ
⎝τ
⎠
⎣τ
⎦
Fa ( x, t ) =
(14.11)
In ogni punto del traferro la Fa, Fad ed Faq sono funzioni
sinusoidali del tempo con pulsazione ω; applicando la
trasformata di Steinmetz alla relazione (14.11), scritta per
l’osservatore centrale della fase di statore, risulta:
Macchine elettriche
34
17
Fa = Fad + Faq
(14.12)
Nella (14.12), Fa, Fad, Faq sono i fasori (temporali) rappresentativi della
f.m.m. statorica e delle sue componenti diretta ed in quadratura visti
dall’osservatore centrale della fase di statore. E’ possibile scomporre il
fasore della corrente della fase di statore considerata I in due
componenti: una componente diretta Id che genera la f.m.m. diretta, in
fase od in opposizione con quella di eccitazione, ed una componente Iq
che genera la f.m.m. in quadratura con quella di eccitazione.
Fa =
3Nka
3Nka
I = F ad + F aq =
( Id + Iq )
2 pπ
2 pπ
Macchine elettriche
(14.13)
35
Se la macchina non è satura, il flusso che si concatena con la spira centrale
dell’avvolgimento di statore (Φ) può essere scomposto nella sua componente
dovuta alla corrente di eccitazione (Φe) ed in quella dovuta alla corrente di
armatura (Φa); quest’ultima a sua volta può essere scomposta nella sua
componente prodotta dalla corrente diretta (Φad) e quella prodotta dalla corrente
in quadratura (Φaq). Anche se il contenuto di armoniche spaziali del campo di
armatura al traferro è considerevolmente maggiore di quello del campo in una
macchina a poli lisci, si può supporre, almeno in prima approssimazione, di
trascurare tutte le armoniche spaziali superiori alla fondamentale.
In tale caso i flussi concatenati prima citati sono funzioni sinusoidali del
tempo con pulsazione ω e possono essere rappresentati dai fasori
rappresentativi, mediante la trasformata di Steinmetz. Risulta quindi:
Φ = Φe + Φad + Φaq
Macchine elettriche
36
18
Data la diversità dei circuiti magnetici su cui agiscono le f.m.m.
diretta ed in quadratura, il coefficiente di proporzionalità fra i
flussi Φad e Φaq e le rispettive correnti Id ed Iq risulta diverso. La
f.e.m. indotta nella fase statorica considerata dal flusso di
armatura, risulta quindi esprimibile mediante due reattanze di
reazione: la reattanza diretta Xrd e la reattanza in quadratura Xrq.
La legge di Kirchhoff delle tensioni per la fase di statore, ottenuta
con un procedimento analogo a quello illustrato per la macchina a
poli lisci, assume quindi la seguente forma:
V = − R I − jX d I d − jX q I q + E0
I = Id + I q
(14.14)
Macchine elettriche
37
Nella (14.14) Xd ed Xq sono rispettivamente la reattanza diretta
e la reattanza in quadratura e derivano dalle rispettive reattanze
di reazione comprendendo anche la reattanza di dispersione, E0
è la tensione a vuoto:
X d = ωLd + X rd
X q = ωLd + X rq
(14.15)
N
E 0 = − jω k a Φ e
2
Le reattanze Xd ed Xq sono grandezze misurabili, ad esempio mediante una prova a
scorrimento in cui la macchina è trascinata ad una velocità leggermente diversa da quella
sincrona, con l’avvolgimento di eccitazione aperto, e con una terna di tensioni
concatenate simmetriche, del corretto senso ciclico, applicate ai morsetti di armatura. In
queste condizioni l’onda di f.m.m. di armatura scorre lentamente rispetto ai poli di campo
a velocità di scorrimento. Vengono registrati gli oscillogrammi della corrente di armatura,
della tensione applicata ai morsetti di armatura, e della tensione indotta nell’avvolgimento
di eccitazione aperto. Da questi dati è possibile risalire ai valori cercati della reattanza
diretta e della reattanza in quadratura.
Macchine elettriche
38
19
Nel piano di Gauss la
relazione (14.14)
viene rappresentata dal
seguente diagramma
(Diagramma di
Blondel). È da notare
che la corrente Id,
essendo in fase con la
f.m.m. Fad, risulta in
fase od in opposizione
con la f.m.m. di
eccitazione Fe;
quest’ultima risulta in
quadratura con E0
(14.15). Ne segue che
la corrente Id è in
quadratura con la
tensione a vuoto E0.
Q
j Xq Iq
P
Xd I
E0
Xq I
j Xd I d
RI S
δ
V
ϕ
O
I
Id
Macchine elettriche
Iq
39
Noto il valore efficace della tensione (V) e della corrente (I) che si vuole erogare
al carico ed il suo fattore di potenza (cos(ϕ)), è possibile utilizzare il diagramma
di Blondel per calcolare la corrente di eccitazione necessaria, analogamente a
quanto fatto col diagramma di Behn-Eshemburg. In questo caso è necessario però
individuare la direzione della corrente diretta e della corrente in quadratura. Ciò
viene fatto, dopo avere tracciato i vettori rappresentativi della corrente (I), della
tensione (V) e delle cadute di tensione sulla resistenza statorica (RI),
individuando sulla normale ad I tracciata da S, i punti P e Q, dalla conoscenza dei
valori della reattanza diretta ed in quadratura. La retta che congiunge i punti O e P
individua la direzione della tensione a vuoto E0. La retta normale a tale direzione
individua la direzione della componente diretta della corrente. E’ possibile a
questo punto effettuare la scomposizione della corrente I nelle sue due
componenti Id e Iq e terminare il tracciamento del diagramma. Dalla conoscenza
della tensione a vuoto e dalla caratteristica a vuoto della macchina si risale al
valore della corrente di eccitazione richiesta.
Macchine elettriche
40
20
Analogamente a quanto fatto per la macchina a poli lisci, è possibile ottenere
una buona approssimazione della coppia elettromagnetica, considerando il
bilancio energetico relativo al funzionamento a regime e trascurando le perdite
nel ferro e nel rame di statore. Con riferimento al diagramma di Blondel,si
ottiene:
p
p
Ce = −3 VIcos ( ϕ ) = −3 V ⎡⎣ I q cos ( δ ) + I d sen ( δ ) ⎤⎦
ω
ω
Infine, tenendo conto delle (14.16), che si ricavano dal diagramma di Blondel
mediante semplici considerazioni geometriche, si ottiene l’espressione della coppia
(14.17):
E − V cos ( δ )
Id =
Xd
V sen ( δ )
Iq =
Xq
⎤
Xd − Xq
p ⎡ EV
sen ( δ ) + V 2
sen ( 2δ )⎥
Ce = −3 V ⎢
2Xd Xq
ω ⎣ Xd
⎦
Macchine elettriche
(14.16)
(14.17)
41
Confrontando l’espressione così ottenuta con quella relativa alla macchina con
poli lisci, si nota come la coppia della macchina con poli salienti risulti essere
data dalla somma di due termini: il primo (che varia col seno dell’angolo di
carico) coincide, a parte la sostituzione della reattanza sincrona con la
reattanza diretta, con la coppia della macchina se fosse a poli lisci, il secondo
(che varia col seno del doppio dell’angolo di carico) non dipende dalla corrente
di eccitazione, ma piuttosto dalla anisotropia del circuito magnetico (differenza
dei valori della reattanza diretta e della reattanza in quadratura). Ne segue che,
a causa della anisotropia del circuito magnetico, la macchina sincrona a poli
salienti è in grado di sviluppare una coppia anche in assenza di eccitazione. In
tal caso la macchina può funzionare solo da motore (motore a riluttanza). La
presenza di tale coppia rende più stabile il comportamento del generatore
sincrono, quando questi sia connesso ad una rete a cui siano collegati altri
alternatori e sia quindi dotata di una frequenza propria. Per questo motivo,
nelle centrali per la produzione di energia elettrica, si preferisce impiegare
alternatori a poli salienti.
Macchine elettriche
42
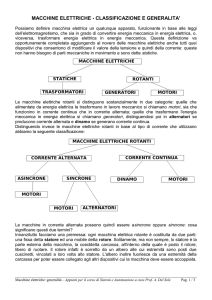
21
f'
V'
T
V
M
f
S
ie
Macchine elettriche
43
la sequenza delle operazioni da eseguire per effettuare il parallelo è la
seguente:
La macchina viene portata in rotazione, a vuoto, alla velocità di
sincronismo imposta dalla frequenza della rete (n = 60 f / p) dal
motore primo M che in questo caso deve fornire solo la coppia
necessaria a vincere gli attriti interni della macchina, essendo nulle sia
la corrente di eccitazione che quella di armatura.
Viene alimentato l’avvolgimento di eccitazione con una
tensione tale da ottenere ai morsetti della macchina un sistema
di tensioni concatenate avente una frequenza ed un valore
efficace coincidenti con quelli della rete e misurati mediante i
voltmetri V e V' ed i frequenzimetri f ed f '. La macchina opera
ancora a vuoto e quindi ancora il motore M deve fornire solo la
coppia necessaria per vincere gli attriti.
Macchine elettriche
44
22
Si agisce sul motore M, con una regolazione fine della
velocità, per portare tensioni concatenate di rete e di
macchina a coincidere sia come frequenza che come fase. A
tale scopo si utilizzano tre lampade (che assorbono una
corrente trascurabile, per cui la macchina si può a tutti gli
effetti considerare funzionante a vuoto) due delle quali si
spengono solo quando le due terne di tensioni concatenate
coincidono in valore efficace e fase, mentre la terza assume
la massima luminosità. Quando tale condizione si verifica (in
realtà le tre lampade si illumineranno e si spegneranno con
una frequenza tanto più bassa quanto più la frequenza della
macchina è prossima a quella della rete), viene chiuso
l’interruttore T ed il parallelo è concluso.
Macchine elettriche
45
Al termine delle operazioni di parallelo, la macchina
sincrona è collegata alla rete, ma funziona ancora a vuoto,
in quanto le f.e.m. indotte nelle fasi di statore uguagliano
le tensioni concatenate e quindi le correnti nelle fasi di
statore risultano nulle. A partire da questa condizione di
funzionamento è possibile portare la macchina sincrona a
funzionare come generatore, erogando potenza sia attiva
che reattiva alla rete, oppure come motore, assorbendo
potenza elettrica dalla rete, oppure come compensatore
sincrono, erogando solo potenza reattiva alla rete.
Macchine elettriche
46
23
Funzionamento da generatore
Se, tramite il motore M, viene fornita potenza meccanica al
rotore; ha inizio un transitorio in cui il rotore tende ad
accelerare e le f.e.m. indotte nelle fasi di statore si sfasano
rispetto alle tensioni delle rete. Circola corrente
nell’avvolgimento di statore e si crea una coppia
elettromagnetica resistente. La condizione di regime viene
raggiunta quando la coppia elettromagnetica resistente
uguaglia la coppia meccanica fornita al rotore. La potenza
meccanica assorbita all’albero dalla macchina viene
trasformata in potenza elettrica ed erogata alla rete. E’ quindi
possibile variare la potenza elettrica reattiva erogata alla rete,
semplicemente variando la corrente di eccitazione della
macchina
Macchine elettriche
47
Funzionamento da motore
Se il motore M viene sostituito col carico meccanico che si vuole
trascinare, al rotore della macchina viene applicata una coppia
resistente; ha inizio un transitorio in cui il rotore tende a rallentare e le
f.e.m. indotte nelle fasi di statore si sfasano rispetto alle tensioni delle
rete. Circola corrente nell’avvolgimento di statore e si crea una coppia
elettromagnetica motrice. La condizione di regime viene raggiunta
quando la coppia elettromagnetica motrice uguaglia la coppia meccanica
resistente applicata al rotore. La potenza elettrica assorbita dalla rete
viene trasformata in potenza meccanica erogata all’albero della
macchina. Il principale ostacolo nella applicazione del motore sincrono
consiste nel valore nullo della coppia di spunto e quindi nella necessità
di avere comunque a disposizione un motore di lancio. L’alternativa al
motore di lancio esterno consiste nel sistema di autoavviamento.
Macchine elettriche
48
24
Quest’ultimo consiste in una speciale gabbia di scoiattolo che si
sistema sul rotore entro cave ricavate sulle espansioni polari. Il
motore si avvia quindi, una volto chiuso l’interruttore di rete, come
un motore asincrono (l’avvolgimento di eccitazione è chiuso in
corto circuito su una resistenza esterna). Giunti in prossimità della
velocità di sincronismo, si eccita il rotore, che viene accelerato da
parte dell’avvolgimento statorico fino a raggiungere il sincronismo.
In figura è riportato il diagramma vettoriale del motore sincrono
con V = cost. e coppia costante (come si è visto, ciò richiede che
E0 sen(δ) = cost.). L’estremo del fasore E0 si sposta sulla retta
tratteggiata parallela a V, dovendo essere E0 sen(δ) = cost.
Macchine elettriche
49
Se I' è in opposizione di fase con V il motore assorbe soltanto potenza attiva; se I è in
anticipo rispetto a V in aggiunta alla potenza attiva assorbita, che è rimasta costante,
viene assorbita anche potenza reattiva induttiva perché il motore è sottoeccitato (E0 <
E0'); se I'' è in ritardo rispetto a V la potenza reattiva assorbita è capacitiva perché il
motore è sovraeccitato (E0'' > E0'). E’ evidente quindi che il motore sincrono ha un
comportamento rispetto al carico molto diverso dal motore asincrono: quest’ultimo deve
assorbire dalla rete oltre che la potenza attiva, anche la potenza reattiva necessaria alla
sua magnetizzazione e pertanto si comporta nei suoi riguardi sempre come un carico
induttivo. Il motore sincrono, invece, ha come sorgente di magnetizzazione anche quella
indipendente, a corrente continua, di rotore, e ciò giustifica la sua possibilità di assorbire
dalla rete anche corrente in anticipo rispetto alla tensione, cioè di comportarsi da carico
capacitivo.
I
I'
V
δ
δ'
δ''
I''
E0
Macchine elettriche
E'0
E''0
50
25
Funzionamento da compensatore sincrono
Se,
agendo
sulla
tensione
di
alimentazione
dell’avvolgimento di eccitazione, si aumenta la corrente di
eccitazione della macchina, ha inizio un transitorio in cui
le f.e.m. indotte nelle fasi di statore, pur restando in fase
con le tensioni imposte dalla rete di alimentazione, le
superano in valore efficace. Facendo per semplicità
riferimento ad una macchina con poli lisci e trascurando
la resistenza statorica, si genera una corrente di armatura I
che risulta in quadratura ritardo rispetto alla f.e.m. E0 ed
alla tensione V. La potenza elettrica erogata è solo una
potenza reattiva puramente induttiva; tutto avviene come
se la macchina sincrona fosse un condensatore
(condensatore rotante) la cui capacità può essere variata
a piacere semplicemente variando la corrente di
eccitazione.
jXs I
E0
V
I
Macchine elettriche
Viceversa, se si diminuisce la corrente di
eccitazione, la f.e.m. E0 risulta minore
della tensione V e la corrente di armatura
I (sempre facendo riferimento ad una
macchina con poli lisci e trascurando la
resistenza statorica) risulta in quadratura
anticipo rispetto ad E0 e V. La potenza
elettrica erogata è solo una potenza
reattiva puramente capacitiva; tutto
avviene come se la macchina sincrona
fosse un induttore (induttore rotante) la
cui induttanza può essere variata a piacere
semplicemente variando la corrente di
eccitazione.
Macchine elettriche
51
jXs I
V
E0
I
52
26
Si chiamano caratteristiche di tensione a carico le curve che
definiscono il modo di variare della tensione ai morsetti in funzione
della corrente di eccitazione, nel funzionamento a carico. Si
possono considerare caratteristiche a carico su impedenza costante
ma, più frequentemente, si prendono in esame le caratteristiche a
carico per corrente costante. Fra queste caratteristiche molto
importanti sono quelle a cos ϕ = 0 in ritardo ed in anticipo che si
ottengono facilmente dalla caratteristica a vuoto.
Si consideri un carico puramente induttivo e cioè con cos ϕ = 0. In
tal caso, trascurando le perdite, la tensione ai morsetti V è
praticamente uguale alla differenza algebrica tra la f.e.m. a vuoto e
la f.e.m. dovuta alla reattanza sincrona.
Macchine elettriche
53
Se si varia il carico esterno (sempre però con cos ϕ = 0) e si agisce
sulla corrente di eccitazione in modo che la corrente di carico rimanga
costante, la legge di variazione della tensione V in funzione della
corrente di eccitazione costituisce la caratteristica a cos ϕ = 0 . Tale
caratteristica si può ottenere dalla caratteristica a vuoto mediante
semplice traslazione.
Infatti, passando da uno stato di funzionamento a vuoto B' ad un
funzionamento a carico C' (cos ϕ = 0 ed I costante) si evidenziano due
effetti:
1) una reazione di armatura (proporzionale ad I) equivalente ad una
corrente di eccitazione fittizia che si somma alla corrente di eccitazione
a vuoto (segmento A'C');
2) una f.e.m. di reazione (proporzionale ad I) che si sottrae alla
f.e.m. a vuoto (segmento B'A').
Macchine elettriche
54
27
cos ϕ = 0 in ritardo
V
a vuoto
cos ϕ = 0 in anticipo
B'
O A’
C'
B
ie
O A
Se si varia V (sempre
però con cos ϕ = 0) e
si agisce sulla corrente
di eccitazione, in
modo che I rimanga
costante, il punto C' si
sposta.
C
Essendo la corrente di carico costante, i lati del triangolo A'B'C', ad
essa proporzionali rimangono invariati. Tale triangolo, denominato
triangolo di Potier, si sposta dunque rimanendo inalterato ed il punto C'
si muove su una curva che è traslata, rispetto alla caratteristica a vuoto,
del segmento B'C' e che è per definizione la caratteristica a cos ϕ = 0 in
ritardo.
Macchine elettriche
55
In condizioni di corto circuito il triangolo di Potier si
trasla in ABC. In queste condizioni (fissata la corrente
di carico) il segmento OC è ottenibile dalla
caratteristica di corto circuito. Note dunque le
caratteristiche a vuoto ed in corto circuito della
macchina Sincrona ed un punto di quella a cos ϕ = 0 si
hanno tutti gli elementi per costruire la curva completa.
Macchine elettriche
56
28
Sincro 2.gif
Macchine elettriche
57
Sincro 3.gif
Macchine elettriche
58
29
Sincro 4.gif
Macchine elettriche
59
Sincro 5.gif
Macchine elettriche
60
30