Filtri passivi.
I filtri sono dispositivi quadripolari (due dipoli) che hanno la funzione di modificare lo spettro del segnale al
loro ingresso, fornendo in uscita un segnale attenuato in modo diverso a seconda della frequenza.
Le applicazioni sono prevalentemente nel campo della trasmissione dei segnali, nella riproduzione sonora
(equalizzazione) e in ogni campo dell'elettronica dove è richiesto un trattamento in frequenza del segnale.
I filtri passivi sono costituiti da resistori, condensatori ed induttori, e possono essere raggruppati in quattro
categorie a seconda della loro funzione:
• filtro passa basso (o taglia alto)
• filtro passa alto (o taglia basso)
• filtro passa banda
• filtro elimina banda
La configurazione che viene trattata ora è quella a "mezzo T" , cioè schematizzabile nel modo seguente:
Z1
VIN
VOUT
Z2
Dove Z1 e Z2 possono essere resistenze induttanze o capacità.
Si chiama funzione di trasferimento del filtro passivo (F.d.T.) il rapporto
F .d .T . = V OUT
V
IN
Tale relazione risulta essere una funzione della frequenza, e il suo valore indica come un segnale a qualsiasi
frequenza venga attenuato o meno. Il massimo valore da essa assunto è, ovviamente, pari all'unità e in tale
circostanza tutto il segnale all'ingresso del filtro viene trasmesso all'uscita. Quando invece essa assume il
valore minimo (zero), il segnale non viene trasmesso per nulla all'uscita.
Filtro passa basso.
Il primo filtro passivo che analizziamo è il passa basso, il quale trasmette all'uscita in modo quasi completo i
segnali a bassa frequenza, mentre attenua sempre di più quelli ad alta frequenza. La funzione di
trasferimento del filtro passa basso è quindi del seguente tipo:
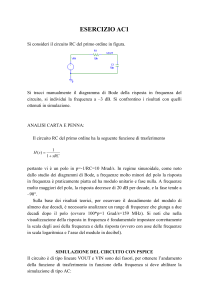
Dalla fig. 1 si nota come al variare della frequenza (qui è
riportata la freq. angolare ω = 2π f ) la F.d.t. decresca dal
valore max che assume alla frequenza nulla, fino a tendere
a zero alle alte frequenze.
Si sceglie come frequenza di taglio ωT la frequenza alla
F.d.t.
1
quale la F.d.t. è pari a
ωT
ω
fig. 1
1
≈ 0,7 , cioè quando dal filtro
2
esce circa il 70 % della tensione che entra. I segnali che
hanno frequenza superiore a quella di taglio verranno
attenuati dal filtro a meno del 70% e vengono ritenuti
“tagliati” dal filtro stesso. I segnali invece on frequenza
inferiore sono trasmessi in uscita.
1
Un filtro con tali proprietà potrebbe essere rappresentato dal seguente circuito
Fig.2
Immaginiamo ora di alimentare l'ingresso del filtro con un segnale la cui corrente ha intensità I, e di aprire i
morsetti di uscita. La tensione d'ingresso sarà pertanto
⎛
j ⎞
⎟⋅I
V i = ⎜⎜ R −
ω C ⎟⎠
⎝
mentre la tensione d'uscita :
⎛
j ⎞
⎟⎟ ⋅ I
V o = ⎜⎜ −
⎝ ωC ⎠
pertanto la funzione di trasferimento diverrà:
F .d .T . =
Vo
1
=
Vi 1 + jωRC
Il modulo di questa funzione è:
F .d .T . =
1
1 +ω
2
2
RC
2
(1)
il cui andamento rispetto la frequenza rispecchia proprio quello di fig.1
La frequenza di taglio, cioè ricordiamo quel valore di frequenza alla quale il segnale di tensione viene ridotto
di 0,707 volte, si ricava ponendo la (1) =
ω
T
=
1
:
2
1
1
mentre la freq. di taglio in Hz è : f T =
RC
2πRC
La fase della f.d.t viene ricavata come per ogni espressione complessa, facendo cioè l’arcotangente del
rapporto tra la parte immaginaria e quella reale.
⎛ − ωRc ⎞
⎟
⎝ 1 ⎠
φ = arctg ⎜
2
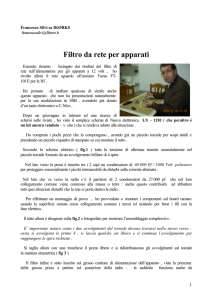
Al variare della frequenza la fase ha l’andamento rappresentato in fig. 3
Φ
Possiamo notare come alla frequenza nulla la fase dia 0°
(comportamento ohmico) mentre a frequenze crescenti la fase
tenda asintoticamente a –90° (comportamento capacitivo).
Alla frequenza di taglio la fase vale esattamente –45°.
Quindi a frequenza molto basse il segnale di uscita è in fase
con quello di ingresso; a frequenze alte il segnale di uscita è
sfasato in ritardo di quasi 90°.
ω
ωT
-45°
-90°
Fig 3
I diagrammi della f.d.t. e della fase in funzione della frequenza hanno un andamento piuttosto distribuito,
così da rendere difficile una loro rappresentazione grafica agevole come si evince anche dal seguente
esempio numerico.
Filtro passivo R C con R = 2 KΩ e C = 0,2 μ F. La ωΤ = 2500 rad/s mentre la fT = 400 Hz.
La tabella seguenta riporta i valori della f.d.t. e della fase a frequenze diverse.
f (Hz)
ω
fdt
φ (°)
10
62,8
1,00
1,44
100
628
0,97
14,11
200
1256
0,89
26,69
400
2512
0,7
45
800
5024
0,45
63,57
1600
10048
0,24
76,06
3200
20096
0,12
82,94
6400
40192
0,06
86,48
Si noti come per poter apprezzare variazioni significative della f.d.t. e della fase occorra avere grandi
escursioni dei valori di frequenza, che difficilmente potremmo riportare su di una scala lineare.
Ragione per cui i diagrammi delle F.d.T. hanno l’asse delle frequenze in scala logaritmica, così da avere le
frequenze che sono potenze del 10 a distanze uguali (Log 1 = 0, Log 10 = 1, Log 100 =2, Log 1000 =3)
mentre l’asse verticale è espresso in decibel (dB), cioè facendo 20 Log10 | F.d.t.|. Tale diagramma prende il
nome di diagramma di BODE, e ne esiste uno per il modulo della f.d.t. ed uno per la fase. Quindi delle
espressioni viste precedentemente ne vanno calcolati i logaritmi. Per familiarizzare con le F.d.t. in scala dB
semilogaritmica, vediamo come è costituita.
Asse dei
decibel
30
20
10
0
1
10
100
1000
10000
-10
Asse delle
frequenze ω
-20
-30
decade
-40
2
3 4
200 300
20 30 40
2000
fig.4
Possiamo notare che le potenze del 10 (1-10-100-1000 ecc.) sono a distanze uguali tra loro, mentre gli altri
valori posti a distanze non uguali sono i multipli delle potenze del dieci, cioè dopo l’uno il due poi il tre a
distanza minore, il quattro a distanza ancora minore fino ad arrivare al 10. Gli intervalli di frequenza i cui
3
estremi sono uno pari a dieci volte l’altro (es. 10-100 oppure 200-2000 ) in questo diagramma sono lunghi
uguali, e vengono chiamati decadi. Gli intervalli di frequenza dove gli estremi sono uno il doppio dell’altro
(ad es. 50-100, 1200-2400) vengono invece chiamati ottave.
In questo modo è possibile comprimere il diagramma della f.d.t. del filtro, riuscendo a rappresentarne grandi
variazioni in poche decadi.
Il filtro dell’esempio precedente infatti ha una f.d.t. in dB che per le diverse frequenze ha valori di seguito
riportati:
ω
fdt (dB)
62,8
0,00
628
-0,27
1256
-0,98
5024
-7,02
2512
-3,03
10048
-12,34
20096
-18,17
40192
-24,14
60288
-27,65
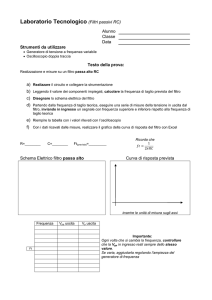
In particolare notiamo che alla freq. di taglio (ωΤ = 1/RC) la f.d.t. vale 1/√2 che in dB diventa:
20Log10 (1/√2) = -3 dB. Il diagramma di BODE divente quindi:
fdt (dB)
ωΤ = 1/RC
0,00
-3
-5,00
1
10
100
1000
10000
100000
1000000
-10,00
-15,00
-20,00
-25,00
-30,00
-35,00
fig. 5
Notiamo come ogni decade il modulo della F.d.t. decresca di 20 dB, oppure come decresca di 6 dB per ogni
ottava: questi valori sono tipici dei filtri del I° ordine come verrà spiegato più avanti. Ugualmente possiamo
rappresentare la fase φ con la scala logaritmica delle frequenze:
φ (°)
ωT
0,00
-10,00 1
-20,00
10
100
1000
-30,00
-40,00
-50,00
-60,00
-70,00
-80,00
-90,00
-100,00
fig. 6
4
10000
100000
Filtro passa alto.
Una realizzazione circuitale è rappresentata nella seguente figura:
La funzione di trasferimento è come al solito il rapporto tra l'impedenza d'uscita e quella d'ingresso:
F .d .T . =
R
R− j
=
1
ωC
j ⋅ω ⋅ R ⋅C
;
1 + j ⋅ω ⋅ R ⋅C
il cui modulo è :
1
F .d .T . =
1+
1
ω R 2C 2
2
che in scala logaritmica diventa una funzione che può essere graficamente rappresentata attraverso la fig. 2.
Mentre per la fase l’operazione da eseguire è sempre l’arcotangente della parte immaginaria della F.d.t.diviso
quella reale.
1
⎛
⎞
Φ = arctg ⎜
⎟
⎝ω ⋅ R ⋅C ⎠
La frequenza di taglio è sempre quella che annulla il denominatore della F.d.T.:
ω T=
1
RC
La funzione di trasferimento in scala semilogaritmica in funzione della frequenza sarà del tipo.
20Lg |F.d.T.|
0 dB
ωT
Logω
-3 dB
fig. 7
5
Per quanto riguarda la fase
Φ (°)
100
90
80
70
60
50
40
30
20
10
0
1
10
100
1000
10000
fig. 8
Possiamo notare come a basse frequenze la fase sia pari a 90°. In effetti a basse frequenze la reattanza del
condensatore è molto più alta della resistenza, così la tensione in uscita sulla R deriva dalla corrente di
scarica del condensatore Vout = I ⋅ R = R ⋅ C ⋅
dVC
che , come già visto, è sfasata di 90° in anticipo. Ad alte
dt
frequenze invece il condensatore ha reattanza trascurabile rispetto alla resistenza, così il circuito diventa
puramente ohmico e la Vout è in fase con la Vin .
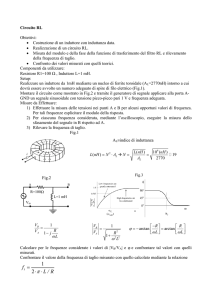
Come si leggono i diagrammi di BODE
Supponiamo di avere un filtro passa basso con R = 1 KΩ e C = 1 μ F . Quindi ωT = 103 rad/sec. e fT = 160
Hz I suoi diagrammi di Bode per il modulo della F.d.t. e della fase sono:
fdt (dB)
0,00
-5,00 1
10
100
1000
10000
100000
1000000
-10,00
-15,00
-20,00
-25,00
-30,00
-35,00
-40,00
-45,00
fig. 9
Immaginiamo di applicare all’ingresso del filtro un segnale sinusoidale VIN = 10 sen (2π 50 t + 30°) la cui
frequenza è 50 Hz , l pulsazione 314 rad/sec e la fase 30°. Nel diagramma di BODE questo segnale si
troverebbe nel punto indicato nella figura 9 con la freccia rossa: la f.d.t. vale 0,95 mentre in dB vale –0,4 dB.
Quindi la risposta del filtro sarà : VOUT = |F.d.t.| * VIN = 0,95* 10 = 9,5 mV
Lo sfasamento lo leggiamo nel relativo diagramma della fase:
La risposta del filtro al segnale di ingresso la possiamo visualizzare in questo modo:
6
0
17,4°
-10 1
10
100
1000
10000
-20
-30
-40
-50
-60
-72°
-70
-80
-90
-100
fig. 10
segnale sinusoidale freq.= 50 Hz
Si noti come l’uscita (in rosso) abbia quasi l’ampiezza dell’ingresso, ed inoltre abbia un leggero sfasamento
in ritardo. Se invece consideriamo un altro segnale di ingresso, sempre sinusoidale avente frequenza
superiore a quella di taglio: V(t) = 10 sen (2π500 t )
F = 500 Hz ω = 3140 rad/sec. VMAX = 10 mV fase = 0°
Dal diagramma di BODE (fig. 9) la frequenza di questo secondo segnale è segnata in azzurro; la f.d.t. vale
0,30 20 Log |f.d.t.| = -10 dB ; fase φ = -51°.
Il segnale in uscita dal filtro ha ampiezza VOUT = 0,3*10 = 3 mV fase φ = -72°. La sua forma, confrontata con
quella del segnale di ingresso sono in figura n°12, nella quale si nota l’attenuazione del segnale ora più
consistente e lo sfasamento.
fig. 12
7
Diagrammi di BODE nel formalismo di LAPLACE.
Tutto quanto visto finora riguarda i segnali in regime sinusoidale. Ma i segnali elettronici non sono
solo sinusoidali anzi, raramente lo sono. In generale essi sono semplicemente variabili e periodici. Da quanto
visto nell’introduzione, i componenti passivi come il condensatore e l’induttanza se sottoposti ad una
tensione variabile, faranno circolare nel circuito una corrente sfasata rispetto alla tensione. Nel regime
sinusoidale si è visto che :
per il circuito capacitivo:
I=
dV
dQ d (C ⋅ VC )
=
= C ⋅ C = jω ⋅ C ⋅ VC
dt
dt
dt
VC =
quindi
I
jω ⋅ C
per il circuito induttivo:
dI
= L ⋅ j ⋅ ω ⋅ I = jω ⋅ L ⋅ I
dt
dV
Cioè quando si esegue l’operazione di derivazione nel tempo
di una grandezza V vuol dire che essa
dt
VL = L ⋅
viene moltiplicata per jω.
Per i segnali non sinusoidali le formule viste prima per VL e VC valgono ancora ma al posto di jω avremo un’
altra variabile che indicheremo con il simbolo S . Essa nel caso sinusoidale coincide con il termine jω , ma
con tensioni in ingresso qualsiasi assume un significato diverso, anche se è comunque una variabile legata
alla frequenza. Quindi se sottoponiamo un condensatore o un’induttanza ad una corrente qualsiasi, la loro
risposta sarà :
VL = s ⋅ L ⋅ I
VC =
1
⋅I
s ⋅C
se poi la corrente è sinusoidale per noi allora s sarà la frequenza. I diagrammi di BODE visti prima sono
ancora validi ovviamente, ma al posto della frequenza ω metteremo la variabile s.
Il motivo per il quale si è introdotta questa variabile per esprimere la risposta dei circuiti è già evidente
nell’espressioni precedenti di VL e di Ic in funzione del tempo. In entrambe le espressioni infatti dovevano
comparire due derivate nel tempo, che ora sono diventate semplicemente una moltiplicazione per la variabile
s. Il vantaggio è quindi quello di trasformare un’equazione con derivate nel tempo in un’espressione
algebrica con la variabile s. L’operazione che permette questa trasformazione si chiama trasformata di
LAPLACE.
Ovviamente vale anche l’operazione inversa che trasforma un’espressione algebrica in s, in un’espressione
differenziale con la derivata nel tempo. L’operazione che permette questa trasformazione inversa viene detta
antitrasformata di LAPLACE.
Trasformata di LAPLACE
Espressione nel tempo
Espressione trasformata con LAPLACE in dominio S
dx
dt
S*X
Antitrasformata di LAPLACE
Questo è solo uno degli esempi di trasformazione con LAPLACE , la cui utilità verrà più chiara in sistemi.
Le funzioni di trasferimento viste prima ora diventano trasformate sostituendo a jω la variabile s.
Per esempio :
1
1
⇒
1 + jωRC
1 + s ⋅ RC
j ⋅ω ⋅ R ⋅C
1 + j ⋅ω ⋅ R ⋅C
8
⇒
s ⋅ RC
;
1 + s ⋅ RC
Con le f.d.t. nella variabile s ora sarà più facile ricavare i diagrammi di BODE di modulo e fase. Questo è un
altro vantaggio delle funzioni in dominio s.
LE f.d.t. infatti vediamo che sono delle espressioni fratte, in cui si può annullare sia il numeratore che il
denominatore per un certo valore di s. Quando si annulla il numeratore diremo che la f.d.t. presenta uno zero,
mentre quando si annulla il denominatore diremo che la f,d,t, ha un polo.
Le f.d.t. che ora esamineremo sono solo quelle in cui la variabile s è al massimo di primo grado. I sistemi che
hanno una simile f.d.t. si chiamano sistemi del 1° ordine. Essi possono avere una delle seguenti f.d.t.:
espressione
K
s oppure s τ
1+ sτ
1
s
oppure
tipo
costante
Zero in origine
Zero non in origine
Polo in origine
1
s ⋅τ
Polo non in origine
1
1 + s ⋅τ
s ⋅τ
1 + s ⋅τ
Zero in origine e polo non in origine
1 + s ⋅τ 1
1 + s ⋅τ 2
Zero non in origine e polo non in origine
Per queste funzioni in s si applica un procedimento standart per ottenere i diagrammi di BODE, che sarà
sistematico e più sintetico rispetto alla trattazione precedente con jω.
1° caso funzione costante:
f.d.t. = K
Æ
20Log|K|
Æ
fase φ = 0°
i relativi diagrammi di BODE sono riportati nelle seguenti figure:
φ
K>1
K=1
Log ω
Log ω
K<1
2° caso funzione con zero in origine:
f.d.t. = S
Æ
|f.d.t.|dB = 20Log|S|
fase φ = arctg ( s / 0) = arctg (∞) = 90°;
Æ
il caso in cui vi è un coefficiente τ che moltiplica la variabile s, è analogo a questo. In effetti nel caso ora
presentato il coefficiente τ valeva 1.
f.d.t. = S*τ
Æ
f.d.t.|dB = 20Log|S| + 20Log τ
Æ
fase φ = 90°;
Il relativo diagramma di BODE per il modulo verrà pertanto ottenuto da quello della prima funzione,
aggiungendo o togliendo il termine costante 20 Log|τ|, a seconda che il termine τ sia rispettivamente
maggiore o minore di 1. Ricordiamo che Logτ > 0 se τ > 1. Si noti la pendenza della retta pari a 20 dB /
decade
9
τ>1
+ 20dB/decade
50
40
τ=1
τ<1
30
20
10
0
0,01
0,1
-10 1
-20
10
100
1000
-30
-40
100
90
80
70
60
50
40
30
20
10
0
-10 1
φ (°)
10
100
1000
3° caso funzione con zero non in origine 1 + s τ;
La f.d.t. è 1 + sτ in dB diventa 20Log|1+sτ| la fase
10000
100000
⎛ s ⋅τ ⎞
⎟
⎝ 1 ⎠
φ = arctg ⎜
Per ricavare il diagramma di BODE ragioniamo in questo modo:
• approssimiamo la f.d.t. per le basse frequenze: Sτ << 1 cioè S << 1/τ la f.d.t. diventa 20Log| 1 | =
0 dB, che è una retta orizzontale sullo zero;
• per le frequenze alte: S >> 1/τ la f.d.t. diventa 20 Log | Sτ | = 20 Log |S| + 20 Log|τ| , che abbiamo
già visto nel 2° caso essere una retta con pendenza + 20 dB/decade che interseca l’asse delle
frequenze sul valore 1/τ;
Basse frequenze
30
20
10
0
-10
1
10
100
1000
-20
-30
-40
Alte frequenze
1/τ
10
10000
Unendo con una linea le due rette (la linea in rosso nella fig. precedente) si ottiene l’andamento effettivo
della f.d.t. per tutte le frequenze. La linea tratteggiata in rosso è la curva effettiva della f.d.t., l’altra non
tratteggiata rappresenta invece l’approssimazione effettuata. In effetti grazie alla scala logaritmica ora è
possibile approssimare in maniera più netta la curva della f.d.t.. In particolare si noti come alla frequenza di
taglio(1/τ = 20 nell’esempio) la f.d.t. non valga +3 dB ma sia approssimata a o dB.
Per la fase operiamo allo stesso modo:
a basse frequenze la tagente della fase φ è circa zero, quindi la fase è 0°;
alla freq. di taglio ωT = 1/τ la tangente vale 1 e la fase è quindi 45°;
alle alte frequenze la tengente diventa infinitamente grande quindi la fase diventa 90°;
LA curva della fase parte quindi da 0°, per finire poi a 90° passando, alla freq. di taglio a 45°. La regola da
seguire in questo diagramma della fase è: partire da 0° Æ portarsi verso i 45° per ω = ωT partendo una
decade prima (ω=1/10τ) per finire a 90° una decade dopo (ω = 10/τ);
100
90
80
70
60
50
40
30
20
10
0
1
10
100
1/τ
1000
Nella figura è rappresentata la fase della funzione di prima, con τ = 1/20 Æ 1/τ = 20.
4° caso funzione con polo in origine.
1
f.d.t. =
s ⋅τ
|f.d.t.|dB= 20 ⋅ Log | 1 | = 20 ⋅ Log1 − 20 ⋅ Log | s ⋅ τ | = − 20 Log | s | − 20 Log | τ |
s ⋅τ
Æ
Il primo termine sulla scala logaritmica rappresenta una retta con pendenza –20 dB/decade. Il secondo è un
termine costante negativo che sposta verso il basso o verso l’alto la retta, a seconda che τ si rispettivamente
maggiore o minore di uno. Supponiamo ad esempio che τ = 10-2 s. Il diagramma di BODE del modulo sarà:
1/τ
30
20
-20 dB/decade
10
0
-10
1
10
100
1000
-20
-30
-40
Per quanto riguarda la fase l’operazione da eseguire è:
11
10000
⎛ − s ⋅τ ⎞
⎟ → φ = − 90°
⎝ 0 ⎠
φ = arctg ⎜
La fase è quindi costantemente pari a –90°, per ogni valore di S. Se ne omette quindi la rappresentazione
grafica.
5° caso : funzione con polo non in origine:
|f.d.t.|dB = 20 Log|
1
1 + s ⋅τ
1
| = 20Log 1 - 20 Log|1 + sτ| = 0 - 20 Log|1 + sτ|;
1 + s ⋅τ
Questa f.d.t. è la stessa vista nel caso n° 3 (pag. 10) ma ha il segno opposto. Quindi il diagrama di BODE del
modulo partirà dal valore 0 dB (approssimazione alle basse frequenze se s << 1/τ), poi per s >> 1/τ il
modulo della f.d.t. diventa: -20Log| sτ | = -20 Log|s| - 20Log|τ| che è la solita retta con pendenza –20
dB/decade che interseca l’asse delle ascisse nel polo s = 1/τ.
Nella figura che segue si è preso τ = 10-3 sec. Il polo quindi è 1/τ = 103
F.d.t. =
1
1 + s ⋅ 10 −3
50
40
30
20
10
0
-10 1
10
100
1000
10000
100000
-20
-30
- 20 dB/decade
-40
-50
Anche in questo caso si procede ad una approssimazione, per la quale la retta che all’inizio ha un valore
costante pari a 0 dB quando raggiunge il polo 1/τ cambia improvvisamente pendenza, decrescendo di 20 dB
per ogni decade (o – 6 dB/ottava). Per quanto riguarda la fase vale quanto detto per il caso n° 3, ma con
segno invertito. Si partirà quindi da 0° per finire a – 90°. La curva approssimata inizierà a decrescere una
decade prima del polo (1/10τ = 100) per arrivare a – 90° una decade dopo (10/τ = 104). Al polo φ = -45°
1/τ
0
-10 1
10
100
1000
-20
-30
-40
-50
-60
-70
-80
-90
-100
12
10000
100000
6° caso funzione co zero in origine e polo non in origine
s ⋅τ
1 + s ⋅τ
anche in questo caso grazie alle proprietà del logaritmo riusciamo a ricavare il diagramma di BODE dai
diagrammi delle funzioni precedenti:
|F.d.t.|dB = 20Log|
s ⋅τ
| = 20Log|sτ| - 20Log|1 + sτ|
1 + s ⋅τ
il primo termine è la funzione con zero in origine (+20 dB/decade), la seconda è la funzione con polo in 1/τ
(filtro passa basso). Ad esempio supponiamo che τ valga 10-2 e quindi 1/τ = 100, nella figura seguente
vediamo tratteggiate in nero le f.d.t. in dB delle due funzioni citate prima, mentre in rosso vediamo la
sovrapposizione delle due f.d.t. che rappresenta quindi la f.d.t. della nostra funzione in esame. Come si nota
questo è un diagramma di BODE di un filtro passa alto con frequenza di taglio fT = 1/2πτ. In effetti si
confronti l’espressione della nostra f.d.t. con quella di un passa alto RC (prima formula a pag. 5)
50
1
1 + s ⋅τ
sτ
40
30
20
10
0
-10 1
10
100
1000
10000
100000
-20
-30
-40
-50
+20
dB/decade
Vediamo ora la fase, sovrapponendo sempre le fasi delle due f.d.t.
Zero in origine
90
70
50
30
1/τ
10
-10 1
-30
10
100
1000
10000
-50
-70
Polo in 1/τ
-90
-110
13
100000
U
n altro schema circuitale del filtro passa alto è il seguente:
La funzione di trasferimento e il suo modulo sono rispettivamente:
F .d .T . =
jωL
;
R + jωL
1
F .d .T . =
1+
R2
ω 2 L2
mentre la frequenza di taglio è sempre la stessa:
ωT =
R
L
Filtri elimina banda.
Con questi filtri si desidera eliminare una componente spettrale di un segnale, di larghezza in
frequenza variabile, che risulta indesiderata o dannosa per l'apparato strumentale che segue ad essi.
Un esempio di filtro taglia banda è il seguente circuito:
La F.d.t. ottenuta sempre facendo il rapporto tra impedenza d'uscita diviso quella d'ingresso, risulta:
F .d .t. =
1
)
ωC
1
R + j ⋅ (ωL −
)
ωC
j ⋅ (ωL −
F .d .t. =
il cui modulo diventa:
1
R 2ω 2C 2
1+ 2
(ω LC − 1) 2
quest'ultima funzione presenta un minimo quando il denominatore della frazione sotto radice si
annulla, cioè per un valore della frequenza
14
1
ω=
LC
che è proprio la frequenza di risonanza del circuito LC.
Su scala logaritmica la F.d.t. assume la forma grafica di seguito riportata:
0 dB
ω=
ω
1
LC
15