Sergio Graffi, Riccardo Rovatti
Introduzione allo studio dei
CIRCUITI ELETTRONICI NON LINEARI
per corsi di laurea dell’ingegneria dell’informazione
7 aprile 2005
2
Questi appunti riguardano i circuiti elettronici analogici non lineari.
Si potrebbe obiettare che nessun circuito elettronico è lineare perché il progetto non può
prescindere totalmente dall’uso di modelli non lineari. Tuttavia, per i circuiti non autonomi destinati all’elaborazione lineare di segnali, le nonlinearità dei dispositivi elettronici
rappresentano un inevitabile inconveniente di cui il progettista deve tenere conto al solo
fine di limitarne gli indesiderati effetti. Per i circuiti non autonomi destinati all’elaborazione non lineare di segnali e per i circuiti autonomi, invece, soltanto l’uso di modelli
nonlineari consente la corretta interpretazione del loro modo di operare perché esso dipende in modo essenziale dalla presenza di opportune nonlinearità. Con circuiti ”non
lineari” si vogliono appunto indicare tali circuiti.
Indice
I
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
7
9
14
18
29
29
34
34
34
36
36
36
II Circuiti non autonomi
II.0.b Multivibratori monostabili. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
II.0.c Multivibratori bistabili. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
37
37
CIRCUITI AUTONOMI
I.1 Oscillazioni. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I.2 Oscillatori. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I.2.a Modelli di oscillatori. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I.2.b Esempi di soluzioni periodiche. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I.2.c Sintesi di resistori a resistenza differenziale negativa mediante componenti tripolari.
I.3 Calcolo approssimato delle oscillazioni. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I.3.a Oscillazioni sinusoidali. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I.3.b Oscillazioni di rilassamento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I.4 Esempi di oscillatori sinusoidali. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I.4.a Oscillatore a ponte di Wien. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I.4.b Oscillatori sinusoidali di ordine superiore. . . . . . . . . . . . . . . . . . . . . . . .
I.5 Esempi di oscillatori di rilassamento (multivibratori astabili). . . . . . . . . . . . . . . . . .
I.5.a da fare. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
INDICE
Elenco delle figure
I.1
I.2
I.3
I.4
I.5
I.6
I.7
I.8
I.9
I.10
I.11
I.12
I.13
I.14
I.15
I.16
I.17
I.18
I.19
I.20
I.21
I.22
I.23
I.24
I.25
I.26
I.27
I.28
I.29
I.30
Due esempi di oscilla.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Un’oscillazione periodica (a) e il suo spettro (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Un’oscillazione multiperiodica (a) e il suo spettro (b). . . . . . . . . . . . . . . . . . . . . . . . . . .
Oscillazioni caotiche(a) e il loro spettro (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Un circuito lineare di 2o ordine. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Esempi di campi di velocità e traiettorie: in a) il ritratto di un circuito del tipo I.5 (µ1 e µ2 positivi; in
b) ciò che avverrebbe con µ1 = µ2 = 0; in c) un esempio di ciò che deve fare un circuito oscillatore in
prossimità del suo stato di riposo instabile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modelli di oscillatori a resistenza negativa derivati dal circuito di figura I.5. . . . . . . . . . . . . . .
Modello di oscillatore a resistenza negativa (a) e suo circuito equivalente a riposo (b). . . . . . . . . .
La retta di carico e la caratteristica S possono dare luogo: a) a 3 punti di riposo dei quali 2 sui rami
a pendenza positivo e uno nell’arco a pendenza negativa, b) a un solo punto di riposo in un ramo a
pendenza positiva, c) a un solo punto di riposo nell’arco pendenza negativa. . . . . . . . . . . . . . .
Il circuito di figura I.8(a) linearizzato nell’intorno di uno stato di riposo. . . . . . . . . . . . . . . . .
(a) Modello di oscillatore a retroazione corrispondente alle (I.16) e (b) un più generale modello a
retroazione. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Grafici delle funzioni (I.27) e della corrispondente F(X). . . . . . . . . . . . . . . . . . . . . . . . .
Soluzione periodica della (I.18) con la (I.27) e a1 = a2 = 10, A = 2. . . . . . . . . . . . . . . . . . .
(a) Soluzione periodica della (I.18) con la (I.27) e a1 = a2 = 0.2, A = 2; (b) spettro di (a). . . . . . . .
Grafici delle funzioni (I.31) e della corrispondente F(X). . . . . . . . . . . . . . . . . . . . . . . . .
Soluzioni della(I.18) con la (I.31). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Grafici delle funzioni (I.32) e della corrispondente F(X). . . . . . . . . . . . . . . . . . . . . . . . .
Soluzioni della(I.18) con la (I.32) (A = 1; µ = 0.2 e µ = 20). . . . . . . . . . . . . . . . . . . . . . .
Un amplificatore senza effetti reattivi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Equivalente per i piccoli segnali dell’amplificatore di Fig.I.20. . . . . . . . . . . . . . . . . . . . . .
Uso del componente tripolare di figura I.20 per ottenere un resistore che si vorrebbe a resistenza
differenziale negativa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Equivalente per i piccoli segnali del resistore di Fig.I.22. . . . . . . . . . . . . . . . . . . . . . . . .
Altra configurazione che usa il componente tripolare di figura I.20 per ottenere un resistore che si
vorrebbe a resistenza differenziale negativa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Equivalente per i piccoli segnali del resistore di Fig.I.24. . . . . . . . . . . . . . . . . . . . . . . . .
Caratteristica ingresso-uscita di un amplificatore operazionale ideale. . . . . . . . . . . . . . . . . . .
a) Amplificatore non invertente dal quale si può derivare un resistore di tipo S; b) il corrispondente
resistore S. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Caratteristica del resistore di figura I.27(b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
a) Amplificatore non invertente dal quale si può derivare un resistore di tipo N; b) il corrispondente
resistore N. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Caratteristica del resistore di figura I.29(b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
7
7
8
8
9
10
11
12
12
13
13
15
16
17
17
17
18
18
18
19
19
20
20
20
21
22
23
24
24
25
6
ELENCO DELLE FIGURE
I.31
I.32
I.33
I.34
I.35
I.36
I.37
I.38
I.39
I.40
I.41
I.42
I.43
I.44
Un circuito che può essere suddiviso in 2 bipoli in 4 diversi modi. . . . . . . . . . . . . . . . . . . .
Il circuito di figura I.31 ha 3 punti di riposo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Un altro resistore a resistenza differenziale negativa. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Un quarto resistore a resistenza differenziale negativa realizzabile con un amplificatore operazionale. .
Un resistore S ottenuto dalla cascata di un primo stadio con base o gate comune e un secondo stadio
con collettore o drain comune. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Esempi di caratteristiche V-I ottenute con simulazioni PSpice per bipoli del tipo di figura I.35 utilizzando modelli di BJT (a) e di MOST (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Un resistore S ottenuto dalla cascata di un primo stadio con collettore comune e un secondo stadio
con base comune (a) e un esempio di caratteristica ottenuta da simulazione con modelli di BJT (b). . .
(a) Un resistore S ottenuto dalla cascata di due stadi a emettitore o source comune; (b) esempi di
caratteristiche ottenute da simulazioni con modelli di BJT (linea continua) e MOST (tratteggiata) . . .
Struttura di un possibile oscillatore sinusoidale a retroazione. . . . . . . . . . . . . . . . . . . . . . .
Equivalente per piccole variazioni dello schema di figura I.11(b). . . . . . . . . . . . . . . . . . . . .
Oscillatore a ponte di Wien. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Esempi di oscillazioni ricavati dal modello di Fig. I.41; le linee a tratteggio indicano l’ampiezza
approssimata ottenuta risolvendo la (I.61): Vy1app ' 0.4VM . . . . . . . . . . . . . . . . . . . . . . . .
Oscillatore a ponte di Wien modificato. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Spettri simulati di Vx (t) per un oscillatore del tipo I.41 rosso e del tipo I.43 (blu); si noti anche la
dipendenza della frequenza di oscillazione dalla nonlinearità: in entrambi i casi essa è minore della
(I.86c) ma nel secondo le è più prossima. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
25
26
26
27
27
28
29
30
31
34
35
36
36
Capitolo I - CIRCUITI AUTONOMI
I.1
Oscillazioni.
Fig. I.1 - Due esempi di oscilla..
Una funzione del tempo che rappresenti l’andamento di una grandezza fisica è necessariamente limitata. Sarà
detta oscillazione se possiede almeno un massimo e un minimo. Se al tendere del tempo all’infinito essa tende a
un valore costante, sarà detta oscillazione transitoria; quando ciò non avvenga e cioè quando il numero di massimi
e di minimi è infinito, si dirà oscillazione permanente o semplicemente ”oscillazione” qualora il contesto indichi
chiaramente che è permanente. Nel seguito ci occuperemo essenzialmente di questo caso. Un’oscillazione permanente
può essere periodica o aperiodica e in quest’ultimo caso può essere multiperiodica oppure caotica. Si rammenti
infatti che la somma di n funzioni periodiche di diversi periodi T1 , T2 , ..., Tn è a sua volta periodica di periodo T solo se
risulta T = k1 T1 = k2 T2 = ... = kn Tn con i ki tutti interi; pertanto i rapporti fra i periodi debbono essere tutti razionali:
se ciò non è, la funzione somma è aperiodica e si dice multiperiodica. Il suo spettro di Fourier è ovviamente a righe.
(a)
(b)
Fig. I.2 - Un’oscillazione periodica (a) e il suo spettro (b).
Le oscillazioni caotiche, invece, sono caratterizzate da spettri distribuiti, non a righe, e da un’infinita sensibilità
alle condizioni iniziali cosicché la conoscenza di una traiettoria non fornisce alcuna informazione sull’evoluzione di
un’altra traiettoria anche se le due traiettorie sono comunque vicine in certi intervalli di tempo.
I.2
Oscillatori.
Diremo oscillatore un sistema dinamico autonomo che possa essere sede di oscillazioni permanenti. Vogliamo
dare risposta alle seguenti domande: quali sono i circuiti oscillatori più facilmente e affidabilmente progettabili e
7
8
CAPITOLO I. CIRCUITI AUTONOMI
(a)
(b)
Fig. I.3 - Un’oscillazione multiperiodica (a) e il suo spettro (b).
(a)
(b)
Fig. I.4 - Oscillazioni caotiche(a) e il loro spettro (b).
realizzabili? Quali criteri di progetto è bene seguire? A tale scopo si adotterà un metodo essenzialmente euristico,
facendo ampio ricorso all’intuizione e alla verifica pseudo-sperimentale rappresentata dalle simulazioni numeriche.
Le seguenti considerazioni, derivate da nozioni che il lettore deve già aver acquisito in precedenza, sono utili per
orientare le scelte di progetto relative a circuiti oscillatori.
1. In un circuito fisicamente realizzabile, un’oscillazione permanente implica una permanente dissipazione di
energia all’interno del circuito stesso e una permanente cessione di energia, auspicabilmente piccola ma non
nulla, al circuito utilizzatore dell’oscillazione. Dunque, l’oscillazione permanente sarà possibile soltanto se nel
circuito sono presenti fonti di energia, cioè se il circuito è attivo.
2. Un circuito dinamico autonomo lineare può produrre soltanto forme d’onda che siano combinazioni lineari di
termini del tipo t ni eσit e jωit le quali, per t → ∞, tendono all’infinito se almeno una σi è positiva oppure se ni > 0
in corrispondenza di σi = 0, e tendono a zero se tutte le σi sono negative. Si potrebbe pensare di ottenere
un’oscillazione permanente sinusoidale nel caso in cui fosse ni = 0 in corrispondenza di una σi = 0 essendo
negative tutte le altre σi ; ma ciò non è in pratica ottenibile perché le ineliminabili imprecisioni e variazioni nel
tempo dei parametri del circuito rendono infinitesima la probabilità di ottenere una σi esattamente nulla. Di
conseguenza un circuito oscillatore deve essere non lineare.
3. Un sistema dinamico non lineare ammette, in generale, una molteplicità di stati di equilibrio che possono essere
stabili o instabili, a ciascuno dei quali è associato un bacino di attrazione o, rispettivamente, di repulsione delle
traiettorie, cioè un insieme di stati a partire dai quali il sistema converge verso lo stato di equilibrio stabile
o si allontana dallo stato di equilibrio instabile: nel caso di equilibrio stabile l’oscillazione evidentemente si
estingue. Sebbene l’instaurarsi di un’oscillazione periodica non sia precluso dall’esistenza di stati di equilibrio
di varia natura, il caso più semplice da prendere in considerazione, è quello di un solo stato di equilibrio che,
per quanto sopra detto, deve essere necessariamente instabile.
Occorrerà quindi che l’equazione caratteristica del circuito linearizzato nell’intorno del suo unico stato di riposo e abbia almeno una radice reale positiva o almeno una coppia di radici complesse coniugate a parte reale
I.2. OSCILLATORI.
9
positiva.
Se le radici con parte reale positiva hanno tutte parte immaginaria nulla, le oscillazioni si innescano con andamento esponenziale e vengono allora dette (come pure l’oscillatore) di rilassamento; se invece la parte
immaginaria è sensibilmente maggiore della parte reale(1 ), le forme d’onda all’innesco assomigliano a sinusoidi con ampiezza lentamente crescente e le oscillazioni permanenti ottenute a regime vengono dette (come pure
l’oscillatore) sinusoidali, anche se sarebbe più corretto chiamarle ”quasi-sinusoidali”.
4. In un sistema dinamico autonomo del primo ordine
Ẋ(t) = F[X(t)]
con X(t) e F(X) continue e derivabili quante volte si vuole come sempre supporremo, l’unica variabile di stato
X(t) non può essere un’oscillazione perché non può avere massimi o minimi. Infatti, in corrispondenza di
un massimo o di un minimo di valore XM che si verifichi all’istante t = tM si deve avere Ẋ(tM ) = 0 ma poiché
Ẍ(t) = F 0 [X(t)]Ẋ(t) risulta anche Ẍ(tM ) = 0 e cosı̀ avviene anche per tutte le derivate successive, il che dimostra
che i valori di X che soddisfano l’equazione F[X] = Ẋ = 0 sono, come è noto, i valori di equilibrio (o di riposo)
del circuito e non possono essere contemporaneamente valori di massimo o di minimo. Pertanto, un circuito
del primo ordine non può essere un oscillatore.
Per realizzare oscillatori elettronici nel modo più semplice e affidabile dovremo dunque prendere in considerazione
dei circuiti dinamici autonomi attivi non lineari almeno del secondo ordine dotati di un solo stato di riposo che
sia instabile.
I.2.a
Modelli di oscillatori.
I(t)
R1
L
C
V(t)
R2
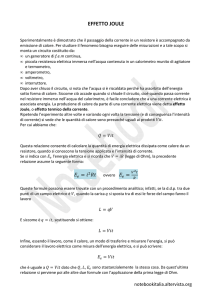
Fig. I.5 - Un circuito lineare di 2o ordine.
Consideriamo preliminarmente il semplice circuito RLC rappresentato nella figura I.5; esso è descritto dalle
equazioni differenziali
dI
L dt = V − R1 I
(I.1)
dV
C dt = −I −V /R2
che ci conviene, per maggior generalità, normalizzare al fine di operare con parametri e variabili adimensionali; indichiamo allora con tN la costante di normalizzazione del tempo, con IN la costante di normalizzazione della corrente,
con VN la costante di normalizzazione della tensione, poniamo
√
ω0 = 1/ LC,
Q1 = ω0 L/R1 ,
Q2 = ω0 R2C,
(I.2)
p
√
tN = 1/ω0 = LC, VN /IN = L/C, µ1 = 1/Q1 , µ2 = 1/Q2
1 Nei
casi intermedi, cioè con parti reale e immaginaria di valore comparabile, si ottengono a regime delle forme d’onda generalmente di
scarso interesse.
10
CAPITOLO I. CIRCUITI AUTONOMI
e indichiamo con un punto le derivate rispetto al tempo, ottenendo cosı̀ il sistema dinamico di 2o ordine
ẋ = −µ1 x + y
(I.3)
ẏ = −x − µ2 y
ove x e y rappresentano ora la corrente e la tensione normalizzate, ma è ovvio che le conseguenze ricavate dallo
studio di tale sistema si possono applicare a tutti i circuiti ottenibili dalle medesime equazioni interpretando in altro
modo le due variabili x, y che sono le variabili di stato del sistema dinamico. La coppia (x, y) è lo stato, il piano
cartesiano ortogonale con coordinate x e y è lo spazio degli stati e in esso, durante l’evoluzione del sistema, si muove,
descrivendo una traiettoria, il punto rappresentativo dello stato P[x(t), y(t)] che d’ora in poi chiameremo brevemente
”stato”.
Ciò rammentato, notiamo anche che l’energia E = 12 CV 2 + 12 LI 2 risulta normalizzata rispetto a EN = CVN2 = LIN2 ,
è rappresentata da
x2 + y2
(I.4)
η=
2
ed è proporzionale (con fattore 1/2), al quadrato della distanza di P dall’origine O del piano degli stati, che rappresenta
lo stato di equilibrio del sistema (o, se si preferisce, lo stato di riposo del circuito) perché le (I.3) a x = 0, y = 0 fanno
corrispondere ẋ = 0, ẏ = 0.
La derivata di η rispetto al tempo è
η̇ = xẋ + yẏ = −(µ1 x2 + µ2 y2 )
(I.5)
avendo usato le (I.3). Poiché per il circuito di Fig. I.5 la quantità entro parentesi è positiva, le (I.4) e (I.5) dimostrano
che l’energia tende a zero e le traiettorie tendono all’origine, cioè il sistema tende allo stato di equilibrio (stabile,
ovviamente). Un ritratto qualitativo della dinamica del sistema si può ottenere osservando che la velocità ~v del punto
P(x, y), che è notoriamente tangente alla traiettoria, è il vettore
~v = ẋ~i + ẏ~j
(I.6)
(avendo indicato con ~i il versore dell’asse x e con ~j il versore dell’asse y) e tracciando nel piano degli stati alcune
traiettorie sovrapposte a una rappresentazione del campo della velocità. Un esempio appare nella figura I.6 a); in b)
80.5, 0.1 <
80, 0<
1
1
0.5
0.5
0.5
0
0
0
-0.5
-0.5
-0.5
1
-1
-1 -0.5
0
aL
0.5
1
-1
-1 -0.5
0
bL
0.5
1
-1
8− 0.5, 0.1 <
-1 -0.5
0
0.5
1
cL
Fig. I.6 - Esempi di campi di velocità e traiettorie: in a) il ritratto di un circuito del tipo I.5 (µ1 e µ2 positivi; in b) ciò
che avverrebbe con µ1 = µ2 = 0; in c) un esempio di ciò che deve fare un circuito oscillatore in prossimità del suo
stato di riposo instabile.
si vede invece ciò che accadrebbe nel caso di un circuito L-C privo di perdite (oscillatore armonico): µ1 = µ2 = 0,
η̇ = 0, l’energia è costante e le traiettorie sono circolari; in c) è infine illustrata la situazione che si deve verificare per
un oscillatore in prossimità del suo stato di riposo instabile: per ottenere un tale risultato è necessario che almeno uno
I.2. OSCILLATORI.
11
dei parametri µ1 , µ2 sia negativo, cioè almeno una delle resistenze R1 , R2 in Fig. I.5 sia negativa. Infatti il polinomio
caratteristico del sistema (I.3) è:
(s + µ1 )(s + µ2 ) + 1 = s2 + (µ1 + µ2 )s + µ1 µ2 + 1
(I.7)
i cui zeri sono
(µ1 + µ2 )
p1,2 = −
±
2
r
(µ1 + µ2 )2
(µ1 + µ2 )
− µ1 µ2 − 1 = −
±
4
2
r
(µ1 − µ2 )2
−1
4
(I.8)
e quindi per l’instabilità si richiede (µ1 + µ2 ) < 0 (per l’innesco oscillante si richiede inoltre |µ1 − µ2 | < 2).
Modelli a resistenza negativa.
Un resistore lineare con resistenza negativa non è fisicamente realizzabile perché non è asintoticamente passivo;
dunque per ottenere un circuito oscillatore si può pensare di sostituire almeno uno dei resistori lineari del circuito I.5
con un resistore non lineare asintoticamente passivo che sia dotato di resistenza differenziale negativa nell’intorno
dello stato di riposo.
Per esempio si può supporre che il resistore lineare R1 sia sostituito con un resistore non lineare a controllo di
corrente, oppure che il resistore R2 sia sostituito con un resistore non lineare a controllo di tensione. (Naturalmente
si può anche immaginare di usare due resistori non lineari, ma si complica senza necessità la struttura dei circuiti); il
circuito equivalente linearizzato nell’intorno dello stato di riposo sarà ancora del tipo I.5.
Si noti che se la caratteristica tensione-corrente di un resistore controllato in corrente presenta un solo arco a
pendenza negativa compreso fra due rami a pendenza positiva, la caratteristica ha necessariamente una forma simile
a quella della lettera S; se invece il resistore è a controllo di tensione, la caratteristica ha forma simile alla lettera N.
Come si vedrà prossimamente, resistori di tal genere, che sono detti, rispettivamente, di tipo S e di tipo N, si possono
effettivamente realizzare con circuiti elettronici e ha quindi senso proporsi di studiare modelli dei tipi indicati nella
figura I.7, ottenuti sostituendo uno dei resistori lineari di Fig. I.5 con il corrispondente resistore non lineare. Essi
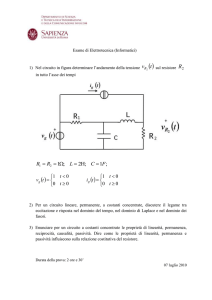
I(t)
S
L
I(t)
V(t)
C
R2
R1
(a)
L
C
V(t)
N
(b)
Fig. I.7 - Modelli di oscillatori a resistenza negativa derivati dal circuito di figura I.5.
soddisfano, rispettivamente, alle equazioni
dI
L dt = V −VS (I)
C dV
dt
= −I −V /R2
dV
C dt = I − IN (V )
L dI
dt
(I.9)
= −V − R1 I
una coppia delle quali è evidentemente la duale dell’altra. A riprova di ciò, la solita normalizzazione produce (useremo
simboli maiuscoli per le variabili dei sistemi non lineari):
Ẏ = X − F(Y )
Ẋ = Y − F(X)
(I.10)
Ẋ = −Y − µ1 X
Ẏ = −X − µ2Y
nelle quali la funzione F(·) ha almeno un massimo e un minimo. I due sistemi differiscono soltanto per uno scambio
12
CAPITOLO I. CIRCUITI AUTONOMI
Ix
Ix
S
BL
Vy
S
R
Vy
(a)
E
(b)
Fig. I.8 - Modello di oscillatore a resistenza negativa (a) e suo circuito equivalente a riposo (b).
di simboli e rappresentano quindi il medesimo sistema dinamico. In seguito sarà quindi sufficiente studiare soltanto
modelli del tipo di Fig. I.7(a) che chiameremo SLCR e ricavare per dualità le proprietà dell’altro; faremo quindi
riferimento essenzialmente alle equazioni
Ẋ = Y − F(X)
Ẏ = −X − µ2Y
(I.11)
Volendo generalizzare tali modelli, possiamo allora considerare una struttura del tipo di figura I.8(a) nella quale
si suppone che il resistore abbia una generica caratteristica di tipo S e che il bipolo lineare BL sia un qualunque
bipolo costituito di resistori, induttori, condensatori (tutti lineari) e generatori indipendenti di tensione e/o di corrente
costante. In condizioni di riposo tale circuito si presenta come in figura I.8(b) e la posizione relativa della caratteristica
S e della retta di carico di equazione Vy = E −R Ix può dar luogo, in generale, a una qualunque delle situazioni riportate
nella figura I.9 Si dovrà quindi scegliere i valori numerici dei parametri in modo che il punto di riposo sia unico e e
inoltre collocato sull’arco a pendenza negativa. Infatti il circuito equivalente per piccole variazioni si presenta come
in figura I.10dalla quale si ricava facilmente l’equazione caratteristica
rs + Z(s) = 0
(I.12)
nella quale Z(s), in quanto impedenza di un bipolo RLC, è una funzione reale positiva, cioè è reale se s è reale e ha
parte reale positiva se lo è la parte reale di s. Se rs > 0, detta s = p una radice della (I.12): Z(p) = −rs è reale negativa
e quindi non può essere positiva la parte reale di p, cioè lo stato di riposo è stabile. Risulta quindi dimostrato anche
per questa via che per ottenere l’instabilità e quindi le oscillazioni, è necessario che la pendenza della caratteristica
in corrispondenza dello stato di riposo sia negativa o, viceversa, che gli stati di riposo sui rami a pendenza positiva
sono sempre stabili.
Fig. I.9 - La retta di carico e la caratteristica S possono dare luogo: a) a 3 punti di riposo dei quali 2 sui rami a
pendenza positivo e uno nell’arco a pendenza negativa, b) a un solo punto di riposo in un ramo a pendenza positiva,
c) a un solo punto di riposo nell’arco pendenza negativa.
I.2. OSCILLATORI.
13
ix
vy
rs
Z(s)
Fig. I.10 - Il circuito di figura I.8(a) linearizzato nell’intorno di uno stato di riposo.
Modelli a retroazione.
X(t)
G(X)
W(t)
W(s)
s + µ2
s 2 + µ2 s + 1
X(t)
X(s)
G(X)
(a)
W(t)
W(s)
H(s)
X(s)
(b)
Fig. I.11 - (a) Modello di oscillatore a retroazione corrispondente alle (I.16) e (b) un più generale modello a
retroazione.
Se nelle prime delle (I.11) si pone W (t) = G[X(t)] = −F[X(t)] si può ricavare
Ẍ = Ẏ + Ẇ = −X − µ2Y + Ẇ = −X − µ2 (Ẋ −W ) + Ẇ
(I.13)
Ẍ + µ2 Ẋ + X = Ẇ + µ2W
(I.14)
e quindi
Supponendo poi che X(t) ammetta trasformata di Laplace X(s) e W (t) ammetta trasformata di Laplace W (s) dalla
precedente deriva
(I.15)
(s2 + µ2 s + 1)X(s) = (s + µ2 )W (s)
e pertanto lo stesso sistema dinamico realizzabile con circuiti del tipo I.7 può essere rappresentato con le relazioni
W (t) = G[X(t)]
(I.16)
s+µ2
X(s) = s2 +µ
W
(s)
2 s+1
le quali descrivono lo schema a blocchi in retroazione di figura I.11(a) e suggeriscono quindi di considerare i modelli
del tipo di figura I.11(b), costituiti da un anello in cui un blocco non lineare ma non reattivo e un blocco lineare ma
reattivo sono posti in retroazione; si noti che G0 (0) = −F 0 (0) > 0 e alla funzione G(·) non si richiede di avere almeno
un massimo e un minimo come per la funzione F(·) del modello a resistenza negativa.
I diversi circuiti rappresentabili in tal modo dipendono dal significato che vogliamo attribuire alle variabili X e W :
• se i blocchi rappresentano doppi bipoli e le variabili X e W sono entrambe tensioni, si tratta di un anello
di retroazione nel quale un doppio bipolo lineare reattivo con guadagno di tensione Vx (s)/Vw (s) = H(s) è
posto in cascata a un amplificatore di tensione non lineare e non reattivo la cui relazione ingresso → uscita è
Vx → Vw = G(Vx );
• se i blocchi rappresentano doppi bipoli e le variabili X e W sono entrambe correnti, si tratta di un anello di
retroazione nel quale un doppio bipolo lineare reattivo con guadagno di corrente Ix (s)/Iw (s) = H(s) è posto in
cascata a un amplificatore di correntenon lineare e non reattivo la cui relazione ingresso → uscita è Ix → Iw =
G(Ix );
14
CAPITOLO I. CIRCUITI AUTONOMI
• se i blocchi rappresentano doppi bipoli, X rappresenta una tensione Vx e W una corrente Iw , si tratta di un
anello di retroazione nel quale un doppio bipolo lineare reattivo con transimpedenza Vx (s)/Iw (s) = H(s) è posto
in cascata a un amplificatore a transconduttanza non lineare e non reattivo con relazione ingresso → uscita
Vx → Iw = G(Vx );
• se i blocchi rappresentano doppi bipoli, X rappresenta una corrente Ix e W una tensione Vw , si tratta di un
anello di retroazione nel quale un doppio bipolo lineare reattivo con transammettenza Ix (s)/Vw (s) = H(s) è
posto in cascata a un amplificatore a transresistenza non lineare e non reattivo con relazione ingresso → uscita
Ix → Vw = G(Ix );
• se i blocchi rappresentano due bipoli, si rutrovano i modelli a resistenza negativa.
I.2.b
Esempi di soluzioni periodiche.
I modelli sopra individuati includono alcuni condizioni necessarie ma non garantiscono affatto l’esistenza di soluzioni periodiche stabili. Si può tuttavia acquisire una certa confidenza sulla possibilità di produrre oscillazioni
permanenti esaminando alcuni casi particolari derivati dall’ipotesi che il valore del parametro µ2 sia abbastanza piccolo da poter porre µ2 = 0 nelle (I.11). Ciò evidentemente significa assumere R2 → ∞ nel modello a resistenza negativa
SLCR o supporre puramente reattivo il blocco lineare del modello di figura I.11(a).
Le (I.11) diventano in tal caso
Ẋ = Y − F(X)
Ẏ = −X
(I.17)
che equivalgono all’equazione differenziale di secondo ordine
Ẍ + f (X)Ẋ + X = 0
(I.18)
nella quale si è posto f (X) = dF(X)/dX. Ponendo f (0) = F 0 (0) = −µ < 0, il polinomio caratteristico è s2 − µs + 1,
i suoi zeri sono
r
µ
µ2
p1,2 = ±
−1
(I.19)
2
4
e quindi le radici dell’equazione caratteristica sono complesse solo per µ < 2, in caso contrario l’innesco è esponenziale.
Le (I.17), con la semplice trasformazione di variabili di stato
X1 = X
X2 = Y − F(X)
(I.20)
Ẋ2 = −X1 − f (X1 )X2
(I.21)
si possono riscrivere come
Ẋ1 = X2
che equivalgono cmunque alla (I.18). Nel piano {X1 , X2 }, però, la derivata rispetto al tempo del quadrato della distanza
dello stato dall’origine ρ = X12 + X22 assume la forma
ρ̇ = −2 f (X1 )X22 = −2 f (X)Ẋ 2
(I.22)
che consente le seguenti osservazioni
• ρ̇ ha sempre segno opposto a f (X);
• ricordando che f (0) = F 0 (0) < 0, ciò significa che gli stati appartenenti a un intorno dell’origine in cui f (X)
sia continua tendono ad allontanarsene, come si desidera che avvenga;
• poiché ρ deve mantenersi limitata, a grandi valori di ρ debbono corrispondere valori negativi di ρ̇ e quindi valori
positivi di f (X);
I.2. OSCILLATORI.
15
• le condizioni precedenti potrebbero essere soddisfatte facilmente se f fosse funzione anche di X2 , scegliendo
(con µ > 0) f (X1 , X2 ) = µ(ρ − 1) = µ(X12 + X22 − 1) = µ(X 2 + Ẋ 2 − 1), infatti l’equazione Ẍ + µ(X 2 + Ẋ 2 − 1)Ẋ +
X = 0 è soddisfatta da X(t) = cos(t + φ)
A proposito di quest’ultima osservazione, bisogna obiettare che è in pratica impossibile realizzare sistemi fisici in cui
i coefficienti di X12 e X22 siano esattamente uguali; un obiettivo più sensato sarebbe di ottenere f (X1 , X2 ) = µ(X12 +
bX22 − 1) con b non necessariamente unitario. Sebbene la realizzazione di un siffatto circuito sia comunque piuttosto
complessa, il caso presenta alcuni aspetti interessanti, soprattutto in riguardo agli oscillatori sinusoidali: se
Ẍ + µ(X 2 + bẊ 2 − 1)Ẋ + X = 0
(I.23a)
ρ̇ = −2µ(X12 + bX22 − 1)X22
(I.23b)
si riconosce che ρ̇ > 0 all’interno della curva di equazione X12 + bX22 − 1 = 0 che è un’ellisse del tipo rapprsentato
nella figura I.12(a) e, viceversa, ρ̇ < 0 all’esterno. Ne segue che tutti gli stati che distano da quello di equilibrio meno
del semiasse minore, cioè tutti gli stati interni al cerchio inscritto nell’ellisse, debbono evolvere in modo che, prima
o poi, usciranno da tale cerchio mentre tutti gli stati che distano dall’origine più del semiasse maggiore, cioè tutti gli
stati esterni al cerchio circoscritto all’ellisse, debbono evolvere in modo che, prima o poi, entreranno in tale cerchio:
in sintesi, tutte le traiettorie prima poi entrano nella corona circolare compresa fra la circonferenza circoscritta e la
circonferenza inscritta e da lı̀ non escono più. Entro tale corona deve pertanto esistere almeno un insieme limite
che ”attrae” tutte le traiettorie. Quando, come nei casi che stiamo considerando, lo spazio degli stati è piano, si
sa (teorema di Poincaré-Bendixon) che tali insiemi sono curve chiuse dette cicli limite. Un esempio, ottenuto con
Mathematica mediante integrazioni numeriche dell’equazione differenziale, appare in Fig. I.12(b). Se b è prossimo
µ =1.5
X2
b=4
1.5
1
ρ < 0
1
0.5
b
X2
ρ > 0
1
0
X1
−0.5
−1
−1
(a)
−0.5
0
X1
0.5
1
(b)
Fig. I.12 - .
all’unità, l’ellisse è prossima a una circonferenza, la corona circolare è molto stretta e quindi anche il ciclo limite in
essa contenuto deve essere presoché circolare. Vale allora la pena di vedere se una funzione sinusoidale del tempo
possa rappresentare una soluzione approssimata della (I.23a) e in effetti si trova che
2
X(t) = √
cos(t)
1 + 3b
(I.24)
16
CAPITOLO I. CIRCUITI AUTONOMI
riduce il primo membro della (I.23a) a
2µ1 p
b−1
(1 + 3b)3
(I.25)
sin(3t)
che può essere trascurabile se µ è piccolo e b è prossimo all’unità. Come si è già osservato, se b = 1, qualunque sia il
valore di µ, la (I.24) diviene X(t) = cos(t) e soddisfa esattamente la (I.23a); se invece b = 0, la (I.23a) diviene
Ẍ + µ(X 2 − 1)Ẋ + X = 0
(I.26)
che è la ben nota equazione di van der Pol, illustre esempio della classe di equazioni differenziali del tipo della
(I.18). Vediamo ora qualche altro caso.
1. Sia f (X) una semplice funzione costante a tratti:
f (X) =
−a1 ,
a2 ,
|X| < A
|X| ≥ A
(I.27)
con a1 > 0, a2 > 0, A > 0 Il grafico è riportato nella figura I.13 insieme con quello della corrispondente funzione
F(X). La (I.18) equivale allora a una coppia di equazioni lineari:
Ẍ − a1 Ẋ + X = 0,
|X| < A
(I.28a)
Ẍ + a2 Ẋ + X = 0,
|X| ≥ A
(I.28b)
i cui intgrali generali sono ovviamente noti e alle quali corrispondono, rispettivamente
ρ̇ = a1 Ẋ 2 ,
ρ̇ = −a2 Ẋ 2 ,
|X| < A
(I.29)
|X| ≥ A
(I.30)
Pertanto il grafico di una soluzione periodica deve essere costituito da una successione di archi ricavati alternativamente dalle due equazioni differenziali lineari. In particolare ne consegue che, se a1 e a2 sono entrambi
maggiori di 2, gli archi sono tutti di tipo esponenziale e l’oscillazione è quindi del tipo che viene detta di rilassamente; se si desidera invece un’oscillazione quasi sinusoidale, occorre che a1 e a2 siano minori di 2 e,
preferibilmente, molto minori, come si intuisce dal fatto che quanto più piccoli sono i due parametri, tanto più
le due equazioni approssimano quella dell’oscillatore armonico. Si vedano gli esempi delle figure I.14 e I.15.
Esercizio.
Lo spettro della figura I.15(b) è stato ricavato simulando con PSpice il circuito descritto dalla seguente netlist:
dimostrare che l’equazione differenziale di tale circuito è quella voluta.
F(X)
f(X)
-A
a2
A
-a1
X
-A
-a1
A
a2
X
Fig. I.13 - Grafici delle funzioni (I.27) e della corrispondente F(X).
I.2. OSCILLATORI.
17
x@tD
6
4
2
t
10
20
30
40
-2
-4
-6
Fig. I.14 - Soluzione periodica della (I.18) con la (I.27) e a1 = a2 = 10, A = 2.
0dB
x[t]
4
2
-30dB
2
4
6
8
10
12
t
-2
-4
-60dB
(a)
(b)
Fig. I.15 - (a) Soluzione periodica della (I.18) con la (I.27) e a1 = a2 = 0.2, A = 2; (b) spettro di (a).
XOPAMP p m u OPAMP
R1 m 0 1
R2 m u 1
R4 p u 5
*
.SUBCKT OPAMP PIU MENO OUT
Gout 0 OUT TABLE={V(PIU,MENO)} (-5,-4k)(-10u,-4k)(10U,4k)(5,4k)
Rout OUT 0 1m
.ENDS
C p 0 1 ic=5
L p 0 1
2. Sia f (X) una semplice funzione lineare a tratti:
f (X) =
a
|X| − A
A
(I.31)
Il grafico è riportato nella figura I.16 insieme con quello della corrispondente funzione F(X) e nella figura
I.17 sono riportati i grafici di due esempi di soluzioni periodiche ottenute mediante integrazione numerica della
(I.18); essi mostrano che le soluzioni si comportano qualitativamente come nel caso precedente.
F(X)
f(X)
-A
A
-a
X
-2A
2A
X
-a
Fig. I.16 - Grafici delle funzioni (I.31) e della corrispondente F(X).
18
CAPITOLO I. CIRCUITI AUTONOMI
4
4
2
2
85
90
95
100
20
-2
-2
-4
-4
a=0.2, A=2
40
60
80
100
120
a=40, A=2
Fig. I.17 - Soluzioni della(I.18) con la (I.31).
3. Sia f (X) una semplice funzione quadratica:
f (X) = µ(X 2 − A2 )
(I.32)
Il grafico è riportato nella figura I.18 insieme con quello della corrispondente funzione F(X). La (I.18) diviene
l’equazione di van der Pol per la quale è noto da tempo che le soluzioni si comportano qualitativamente come nei
casi precedenti; nella figura I.19 sono riportati i grafici di due esempi di soluzioni periodiche ottenute mediante
integrazione numerica.
4. Sperimentando numericamente, ad esempio con Mathematica, si può verificare che analoghi risultati si ottengono con f (X) = 1 − 8/(4 + X 2 ) (che è una versiera di Gaetana Agnesi), f (X) = cosh(X) − 2, f (X) =
1 − 2/ cosh(X) e molte altre funzioni; si può quindi supporre che le relazioni fra la corrente e la tensione
dei resistori effettivamente realizzabili con circuiti elettronici consentano di ottenere oscillazioni sinusoidali e
oscillazioni di rilassamento anche se non corrispondono esattamente a una specifica funzione f (X) prefissata.
f(X)
F(X)
-µA2
-A
-A◊3
A
A◊3
X
X
-µA2
Fig. I.18 - Grafici delle funzioni (I.32) e della corrispondente F(X).
2
2
1
1
85
90
95
100
20 40 60 80 100 120
-1
-1
-2
-2
Fig. I.19 - Soluzioni della(I.18) con la (I.32) (A = 1; µ = 0.2 e µ = 20).
I.2.c
Sintesi di resistori a resistenza differenziale negativa mediante componenti tripolari.
È noto, ad esempio, che la caratteristica tensione-corrente della scarica elettrica in un gas rarefatto utilizzata in
molte lampade è di tipo S, come pure è noto che i dispositivi a due terminali denominati diodi ad effetto tunnel
sono dotati di una caratteristica di tipo N. La disponibilità di bipoli elettronici che si comportano, trascurandone
gli effetti reattivi, come resistori a resistenza differenziale negativa è però assai più ampia, come ora verrà mostrato.
Consideriamo infatti la figura I.20 nella quale si intende rappresentare uno stadio amplificatore privo di effetti reattivi
I.2. OSCILLATORI.
19
Fig. I.20 - Un amplificatore senza effetti reattivi.
e realizzato mediante un componente tripolare. Il suo equivalente per piccoli segnali può rappresentarsi come nella
figura I.21. Ricordiamo che il guadagno di tensione si esprime più semplicemente con i parametri g e che il guadagno
di corrente si esprime in modo duale con i parametri r:
Av = −
rf
gf
; Ai = −
go + Gc
ro + Rc
(I.33)
Ricordiamo inoltre che la resistenza di ingresso e la resistenza di uscita si possono esprimere nei modi seguenti:
Rin = ri −
r f rr
ri ro − r f rr + ri RC
Dr + ri RC
=
=
ro + RC
ro + RC
ro + RC
(I.34)
Rout = ro −
r f rr
ri ro − r f rr + ro RG Dr + ro RG
=
=
ri + RG
ri + RG
ri + RG
(I.35)
Fig. I.21 - Equivalente per i piccoli segnali dell’amplificatore di Fig.I.20.
e assumiamo che sia Rin > 0 ∀RC e Rout > 0 ∀RG , non solo perché è il caso più consueto ma anche perché, se cosı̀ non
fosse, avremmo già la resistenza negativa che stiamo cercando di ottenere. In particolare, se RC → ∞, Rin → ri e quindi
deve essere ri > 0, se RG → ∞, Rout → ro e quindi deve essere ro > 0, se invece RC = 0, risulta Rin = Dror , pertanto anche
il determinante della matrice di resistenze Dr deve essere positivo. In modo duale oppure da questi stessi risultati si
può dimostrare che gi > 0, go > 0, Dg > 0. Supponiamo ora che il medesimo componente tripolare, invece di essere
usato assieme alla resistenza di carico Rc per ottenere uno stadio amplificatore, venga inserito in un circuito che lo
vincola a comportarsi come un bipolo del tipo indicato nelle figure I.22 e I.23. I vincoli sono, evidentemente
v = v1 − v2
(I.36a)
i = i1 = −i2
(I.36b)
e pertanto la resistenza differenziale v/i del bipolo, che indicheremo con rS , si esprime facilmente usando i parametri
resistenze:
v v1 − v2 ri i + rr (−i) − r f i − ro (−i)
rS = =
=
= ri − rr − r f + ro
(I.37)
i
i
i
20
CAPITOLO I. CIRCUITI AUTONOMI
Fig. I.22 - Uso del componente tripolare di figura I.20 per ottenere un resistore che si vorrebbe a resistenza
differenziale negativa.
Fig. I.23 - Equivalente per i piccoli segnali del resistore di Fig.I.22.
Prima di discutere in quali casi risulti rS < 0, consideriamo un’altra possibile configurazione per usare come bipolo
il componente tripolare. Essa è indicata nelle figure I.24 e I.25 e corrisponde ai vincoli
Fig. I.24 - Altra configurazione che usa il componente tripolare di figura I.20 per ottenere un resistore che si vorrebbe
a resistenza differenziale negativa.
v = v1 = v2
(I.38a)
i = i1 + i2
(I.38b)
dai quali si può facilmente ricavare, usando i parametri conduttanze, la conduttanza differenziale i/v del bipolo, che
indicheremo con gN :
i
i1 + i2 gi v + gr v + g f v + go v
gN = =
=
= gi + gr + g f + go
(I.39)
v
v
v
Conviene osservare subito che, siccome le matrici di ammettenze e di impedenze sono l’una l’inversa dell’altra,
I.2. OSCILLATORI.
21
Fig. I.25 - Equivalente per i piccoli segnali del resistore di Fig.I.24.
valgono le seguenti relazioni
zi
zf
zr
zo
yi
yf
yr
yo
=
yo Dz −yr Dz
; Dy = yi yo − y f yr
−y f Dz yi Dz
(I.40a)
zo Dz −zr Dz
; Dz = zi zo − z f zr
−z f Dz zi Dz
(I.40b)
=
applicando le quali si riconosce subito che
rS =
go + gr + g f + gi
gN
=
= gN Dr
Dg
Dg
(I.41)
la quale mostra che rS e gN hanno sempre lo stesso segno. Dunque, se il componente tripolare è tale da dare luogo a
un resistore a resistenza differenziale negativa quando viene usato come nella figura I.22, esso dà luogo sicuramente
a un resistore a resistenza differenziale negativa anche quando venga usato come nella figura I.24; in caso contrario,
nessuna delle due configurazioni darà luogo a resistenze negative. In altri termini, la proprietà di poter essere impiegato come resistore a resistenza differenziale negativa appartiene al componente tripolare e non alla configurazione
usata.
Per riconoscere allora quali tipi di amplificatori vale la pena di prendere in considerazione, riscriviamo le (I.37) e
(I.39) nel seguente modo:
r f + rr
rS = (ri + ro ) 1 −
(I.42a)
ri + ro
−(g f + gr )
gN = (gi + go ) 1 −
(I.42b)
gi + go
e osserviamo che, usando le (I.40a), risulta
r f + rr
=
ri + ro
−g f
Dg
go
Dg
r
+ −g
Dg
+
gi
Dg
=
−(g f + gr )
= A∗
gi + go
(I.43)
cosicché in luogo delle (I.37), (I.39) si possono usare le sequenti espressioni:
rS = (ri + ro )(1 − A∗ )
(I.44)
gN = (gi + go )(1 − A∗ )
(I.45)
A∗ .
nelle quali appare un nuovo parametro, caratteristico del componente tripolare, che è stato indicato con
Nel caso particolarmente significativo in cui il doppio bipolo di figura I.21 sia unilaterale, cioè sia rr e gr siano
nulle e quindi Rin = 1/Gin = ri = 1/gi , Rout = 1/Gout = ro = 1/go , risulta
A∗ =
−g f
−r f
=−
go + Gin
ro + Rin
(I.46a)
22
CAPITOLO I. CIRCUITI AUTONOMI
rS = (Rin + Rout ) (1 − A∗ )
(I.46b)
gN = (Gin + Gout ) (1 − A∗ )
(I.46c)
e dunque, nel caso di unilateralità(2 ), confrontando le espressioni di A∗ con le (I.33):
• A∗ è il guadagno di corrente che si otterrebbe nell’amplificatore di figura I.21 se la resistenza di carico RC fosse
uguale alla resistenza di ingresso Rin ,
• A∗ è il guadagno di tensione che si otterrebbe nell’amplificatore di figura I.21 se la conduttanza di carico GC
fosse uguale alla conduttanza di ingresso Gin ,
• una resistenza negativa si può ottenere soltanto se A∗ > 1.
Se una resistenza differenziale negativa è stata ottenuta, i bipoli delle figure I.22 e I.24 sono resistori a resistenza
negativa fisicamente realizzabili e quindi asintoticamente passivi, cioè i rami a pendenza positiva della caratteristica
giacciono, per valori sufficientemente grandi della corrente e della tensione, nel primo e nel terzo quadrante del piano
V-I; inoltre, come si ricorderà, essi sono connessi all’arco a pendenza negativa (che supporremo unico, come avviene
nei casi più semplici e frequenti) nei punti in cui si annulla la resistenza differenziale se si tratta di un resistore S o nei
punti in cui si annulla la conduttanza differenziale se si tratta di un resistore N; se si ricorda poi che tutti i parametri
differenziali, e quindi anche A∗ , sono funzioni dei valori di riposo e si osservano le relazioni (I.44) e (I.45), si conclude
facilmente che rS e gN si annullano in corrispondenza dei punti di riposo nei quali A∗ = 1, fatta eccezione per i casi
assai particolari in cui, nel medesimo punto di riposo, l’altro fattore sia infinito. Di norma, quindi, il resistore con
entrambi i terminali ”fuori massa” rappresentato nella figura I.22 è di tipo S e il resistore con un terminale ”a massa”
rappresentato nella figura I.24 è di tipo N; se dunque il componente tripolare di partenza è ”giusto” cioè ha A∗ > 1 su
un certo insieme di punti di riposo, con esso si può realizzare. a piacere, sia un resistore S fuori massa che un resistore
N con un capo a massa.
Esempi con amplificatori operazionali.
Gli esempi più semplici da analizzare sono quelli che utilizzano il modello ideale di un amplificatore operazionale,
e da questi appunto si comincerà, ma si noti subito che l’unica proprietà che è essenziale consiste nella caratteristica ingresso-uscita di tipo sigmoidale, assimilabile a un gradino come indicato nella figura I.26, pertanto circuiti
sostanzialmente identici a quelli che verranno presentati si possono ottenere anche con altri dispositivi, per esempio
utilizzando degli invertitori o altre porte logiche. Poiché A∗ può essere interpretato come un guadagno di tensione e
deve essere maggiore di 1, si dovrannp considerare degli amplificatori di tipo non invertente. Nella figura I.27(a)
Vu
VM
Vd
-VM
Fig. I.26 - Caratteristica ingresso-uscita di un amplificatore operazionale ideale.
è appunto rappresentato un amplificatore di tal genere che fa uso di un amplificatore operazionale supposto ideale,
tale cioè da avere la caratteristica ingresso-uscita di figura I.26 nonché correnti di ingresso nulle, tensione di uscita
indipendente dalla corrente di uscita, CMRR infinito ed effetti reattivi nulli. Rispetto alla configurazione elementare
2 E anche, approssimativamente, nel caso in cui il doppio bipolo, pur non essendo rigorosamente unilaterale, è però fortemente non reciproco,
cioè |gr | |g f |, |rr | |r f |.
I.2. OSCILLATORI.
23
ben nota è stato aggiunto il resistore R3 al fine di rendere finito il primo fattore della (I.46b). È noto che, in tutti i
punti di riposo nei quali l’amplificatore operazionale non è in saturazione, il guadagno di tensione vale 1 + RR21 ed è
indipendente dalla resistenza di carico perchè la resistenza di uscita è nulla; esso pertanto coincide sempre con A∗ . Si
sa inoltre che l’amplificatore è unilaterale e si riconosce subito che la resistenza di ingresso è Rin = R3 . Risulta quindi
R2
R2 R3
rS = R3 1 − 1 +
(I.47)
=−
R1
R1
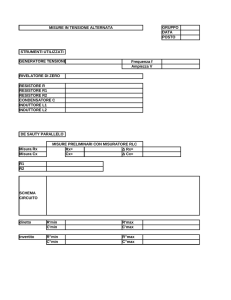
certamente negativa. Deve quindi essere un resistore di tipo S il bipolo di figura I.27(b) che corrisponde alla configurazione di figura I.22: vediamo dunque di determinarne la caratteristica. L’operazionale si trova in saturazione
R2
R2
R1
R1
Vd
Vd
Vu
I
Vout = Vu
V+ = Vin
V
R3
R3
(a)
(b)
Fig. I.27 - a) Amplificatore non invertente dal quale si può derivare un resistore di tipo S; b) il corrispondente resistore
S.
positiva (Vu = VM ) se V + ≥ V − cioè se VM +V ≥
VM R1
(R1 +R2 ) ,
da cui
V ≥ VL = −VM
R2
R1 + R2
(I.48a)
e in tal caso si ha, ovviamente
V = R3 I −VM
(I.48b)
e quindi
I ≥ IH = VM
R1
R3 (R1 + R2 )
(I.48c)
Le (I.48) definiscono, nel piano {V − I}, una semiretta appartenente al quadrante {V ≥ VL , I ≥ IH }, avente pendenza
1
R3 e origine nel punto A di coordinate {VL , IH }.
−VM R1
Analogamente, l’operazionale si trova in saturazione negativa (Vu = −VM ) se V + ≤ V − cioè se −VM +V ≤ (R
,
1 +R2 )
da cui
R2
V ≤ VH = VM
(I.49a)
R1 + R2
e in tal caso si ha, ovviamente
V = R3 I +VM
(I.49b)
e quindi
I ≤ IL = −VM
R1
R3 (R1 + R2 )
(I.49c)
Le (I.49) definiscono, nel piano {V − I}, una semiretta appartenente al quadrante {V ≤ VH , I ≤ IL }, avente pendenza
ancora 1/R3 e origine nel punto B di coordinate {VH , IL }. Si può infine facilmente verificare che il segmento di
24
CAPITOLO I. CIRCUITI AUTONOMI
I
Vu=VM
A
O
V
B
VM
Vu=-
Fig. I.28 - Caratteristica del resistore di figura I.27(b).
estremi A e B appartiene alla retta di equazione
V =−
R2 R3
I
R1
(I.50)
e corrisponde alla regione di grande guadagno dell’amplificatore operazionale che nei precedenti calcoli è stata trattata
con l’approssimazione del cortocircuito virtuale; il risultato complessivo è mostrato nella figura I.28. Un altro
R
R
R2
2
R1
1
R
Vd
Vu
Vin
4
Vu
Vd
I
Vout
R4
V
(a)
(b)
Fig. I.29 - a) Amplificatore non invertente dal quale si può derivare un resistore di tipo N; b) il corrispondente resistore
N.
amplificatore non invertente è rappresentato nella figura I.29(a). Rispetto alla configurazione elementare ben nota è
stato aggiunto il resistore R4 al fine di rendere finito il primo fattore della (I.46c): risulta infatti Gout = 1/R4 e Gin = 0.
In virtù di quest’ultima, A∗ è interpretabile come il guadagno di tensione a vuoto dell’amplificatore, che sappiamo
essere 1 + RR21 . Dalla (I.46c) risulta allora
1
R2
R2
gN =
1 − t(1 + ) = −
R4
R1
R1 R4
(I.51)
certamente negativa. Deve quindi essere un resistore di tipo N il bipolo di figura I.29(b) che corrisponde alla configurazione di figura I.24. La caratteristica è mostrata nella figura I.30 e può essere determinata in modo simile a quanto
si è visto per il precedente resistore S utilizzando le relazioni
I=
V = VM
V −Vu
R4
se V ≥ VM
(I.52a)
R1
R1 + R2
(I.52b)
I.2. OSCILLATORI.
25
V = −VM
se V ≤ −VM
R1
R1 + R2
(I.52b)
Si consideri ora il circuito di figura I.31: esso si può pensare ottenuto collegando il resistore S di figura I.27(b) con il
Vu =
VM
I
B
O
-VM
V
Vu =
A
Fig. I.30 - Caratteristica del resistore di figura I.29(b).
resistore R4 e,se la resistenza di quest’ultimo è minore del valore assoluto della resistenza rS data dalla (I.47), cioè se
R1 R4 < R2 R3
(I.53)
si verifica la situazione di figura I.32, cioè il circuito ha 3 punti di riposo: due con l’operazionale in saturazione e
uno con tensioni e correnti tutte nulle. Il medesimo circuito, d’altra parte, può considerarsi costituito dal resistore
N di figura I.29(b) chiuso sul resistore R3 e i medesimi tre punti di riposo sono rappresentati dalle intersezioni della
caratteristica di figura I.30 con la retta di carico V = −R3 I.
R2
R1
R4
R3
Fig. I.31 - Un circuito che può essere suddiviso in 2 bipoli in 4 diversi modi.
I
Vu =
VM
V
Vu =
-V M
V = -R4 I
Fig. I.32 - Il circuito di figura I.31 ha 3 punti di riposo.
26
CAPITOLO I. CIRCUITI AUTONOMI
Ma è lecito anche pensare che il circuito di figura I.31 sia costituito dal resistore R1 e dal bipolo rappresentato nella
figura I.33 e, dal momento che i punti di riposo sono ovviamente sempre gli stessi, ci sono certamente 3 intersezioni
della caratteristica di tale bipolo con la retta V = −R1 I, il che significa che tale caratteristica o è di tipo S o è di tipo
N. Per decidere quale caso si verifica si può analizzare il bipolo in modo analogo ai casi precedenti, ma ciò viene
lasciato come esercizio per il lettore. Più rapidamente si può osservare che esistono tre punti di intersezione della
caratteristica con l’asse delle correnti (V = 0) e una sola con l’asse delle tensioni (I = 0), infatti se V = V − = 0,
R3
Vd = V + = (RV3u+R
, quindi i punti di riposo possono essere rappresentati nel piano {Vd ,Vu } come intersezioni della
4)
caratteristica ingresso-uscita dell’operazionale (v. figura I.26) con la retta di equazione Vu = (1 + RR43 )Vd la quale,
avendo pendenza positiva, interseca la caratteristica dell’operazionale sia nell’origine che in due punti in saturazione.
M
In corrispondenza a V = 0 sono quindi possibili i 3 valori di corrente I = 0 e I = ∓V
R2 ; invece da I = 0 consegue
V
R
R
V = V − = Vu , Vd = (R3u+R3 4 ) −Vu da cui Vu = −(1 + R34 )Vd che è l’equazione di una retta a pendenza negativa nel piano
{Vd ,Vu }, l’intersezione con la caratteristica Vu (Vd ) dell’operazione è quindi unica, nell’origine del piano {Vd ,Vu } e
il punto di riposo del resistore è pure unico, nell’origine del piano {V, I}. Si tratta dunque di un resistore di tipo S,
cioè a controllo di corrente, che non sarebbe stato facilmente deducibile dal metodo di sintesi di resistori a resistenza
differenziale negativa precedentemente esposto. Si noti, in particolare, che si tratta di un resistore S con un terminale
a massa. C’è, infine, un quarto bipolo da esaminare: quello che si ottiene dal circuito di figura I.31 asportandone il
R2
I
Vu
V
R4
R3
Fig. I.33 - Un altro resistore a resistenza differenziale negativa.
resistore R2 . Anche questo deve essere ovviamente un resistore S o N: lo riconosca il lettore.
I
V
R1
Vu
R3
R4
Fig. I.34 - Un quarto resistore a resistenza differenziale negativa realizzabile con un amplificatore operazionale.
Esempi con transistori.
Non è possibile ottenere un resistore a resistenza differenziale negativa utilizzando un solo stadio amplificatore
a transistor perché gli stadi con emettitore o source comune sono invertenti, gli stadi con collettore o drain comune
hanno guadagno di tensione < 1 e gli stadi con base o gate comune hanno il modulo del guadagno di corrente ≤ 1;
bisogna quindi ricorrere ad amplificatori con (almeno) 2 stadi.
Le configurazioni non invertenti di due stadi amplificatori a transistor che possono avere A∗ > 1 sono tre:
• uno stadio con base o gate comune seguito da uno stadio con collettore o drain comune,
I.2. OSCILLATORI.
27
• uno stadio con collettore o drain comune seguito da uno stadio con base o gate comune,
• due stadi con emettitore o source comune.
Vcc
R
1
2
I
V
I01
I02
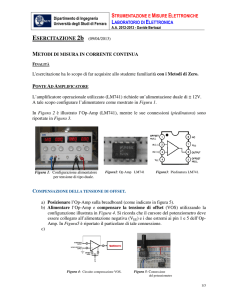
Fig. I.35 - Un resistore S ottenuto dalla cascata di un primo stadio con base o gate comune e un secondo stadio con
collettore o drain comune.
Applicando la configurazione di Fig. I.22 e utilizzando i modelli quanto più semplici possibile per tutti i componenti, nel primo caso si ottiene il bipolo rappresentato nella figura I.35; l’amplificatore è unilaterale con Rin = 1/gm1 ,
Rout = 1/gm2 e
gm2 Rin
gm1 gm2 R
A∗ =
· gm1 R =
(I.54a)
1 + gm2 Rin
gm1 + gm2
rs =
gm1 + gm2
−R
gm1 · gm2
(I.54b)
Le correnti nei transistori sono I1 = I01 − I e I2 = I02 + I: è evidentemente agevole ottenere rs < 0 in un certo intervallo
di valori di I includente il valore nullo ed avere cosı̀ una caratteristica S con l’arco a resistenza negativa che interseca
l’asse I = 0; in tale intersezione, poi, la tensione al nodo di emetttitore o source del transistore 2 risulta maggiore della
corrispondente tensione del transistore 1 di una quantità circa uguale allatensione collettore-emettitore o drain-sorce
di quest’ultimo, quindi V (0) < 0. La corrente I può assumere al massimo il valore I01 con 1 interdetto e al minimo il
valore −I02 con 2 interdetto, come illustrato negli esempi numerici di Fig. I.36.
1mA
I
200µA
I
0
0
-200µA
-400µA
-1mA
-5V
-4V
(a)
V
-3V
-5V
-4V
V
-3V
-2V
(b)
Fig. I.36 - Esempi di caratteristiche V-I ottenute con simulazioni PSpice per bipoli del tipo di figura I.35 utilizzando
modelli di BJT (a) e di MOST (b).
Un semplice modello di resistore S ottenuto dalla cascata di un primo stadio con collettrore comune e un secondo
stadio con base comune, che si suppone utilizzino transistori uguali, appare in Fig. I.37(a); posto Rb = R1 ||R2 , si
28
CAPITOLO I. CIRCUITI AUTONOMI
calcola facilmente Rin = Rb , Rout = R,
A∗ = gm2
gm1 /gm2
gm1 gm2 R Rb
R Rb
·
=
R + Rb 1 + gm1 /gm2 gm1 + gm2 R + Rb
rs = R + Rb −
(I.55a)
gm1 gm2
R Rb
gm1 + gm2
(I.55b)
Essendo poi
V = Vcc
Rb
Rb
+ Rb I − [Vcc − R(I + I2 )] = −Vcc + (R + Rb )I + R I2
R1
R2
(I.56)
il ramo a pendenza positiva che corrisponde all’interdizione del transistor 2 (I2 = 0) ha pendenza 1/(R+Rb ) e interseca
1
; il ramo a pendenza positiva che corrisponde all’interdizione del transistor 1 (I2 = I0 )
l’asse I = 0 in V = −Vcc R1R+R
2
1
ha la stessa pendenza e interseca l’asse I = 0 in V = −Vcc R1R+R
+ R I0 .
2
In corrispondeza del valore di I che rende uguali le correnti nei transistori (I1 = I2 = I0 /2) deve essere nulla la
tensione V1 al nodo di base o gate del transistor 1 e la resistenza differenziale deve essere negativa. Poiché V1 =
Rb (Vcc /R1 + I), tale valore della corrente è sicuramente negativo. Se ne conclude che l’arco della caratteristica a
pendenza negativa giace nel semipiano I < 0.
Vcc
200µA
R1
R
V
0
I
I
1
2
-200µA
-400µA
I0
R2
-6V
I
(a)
-5V
-4V
V
-3V
(b)
Fig. I.37 - Un resistore S ottenuto dalla cascata di un primo stadio con collettore comune e un secondo stadio con base
comune (a) e un esempio di caratteristica ottenuta da simulazione con modelli di BJT (b).
Il caso di due stadi con emetttitore o source comune è esemplificato nella figura ??; con i BJT è facile ottenere A> 1
anche in presenza dei partitori resistivi(3 ) fra gli stadi che sono generalmente necessari per consentire alle tensioni di
collettore valori maggiori della tensione di base, le resistenze sugli emettitori possono anche essere nulle. A causa di
tali possibili varianti, i criteri di progetto si ricavano più agevolmente analizzando di volta in volta lo specifico circuito
che utilizza un tale resistore.
3 Talvolta
con i gate
connessi a una alimentazione negativa invece che a massa; con i MOST è generalmente possibile connettere direttamente i drain
I.3. CALCOLO APPROSSIMATO DELLE OSCILLAZIONI.
+
29
200µA
I
100µA
0A
V
I
0
-1V
(a)
1V
V
(b)
Fig. I.38 - (a) Un resistore S ottenuto dalla cascata di due stadi a emettitore o source comune; (b) esempi di
caratteristiche ottenute da simulazioni con modelli di BJT (linea continua) e MOST (tratteggiata) .
I.3
I.3.a
Calcolo approssimato delle oscillazioni.
Oscillazioni sinusoidali.
Nel caso della (I.18) con la (I.27), un’approssimazione sinusoidale della soluzione periodica si può ottenere osservando innanzitutto che, con X(t) = X1 cos(t)(4 ), si ha Ẍ + X = 0 ∀ X1 , e la (I.18) si riduce a f [X1 cos(t)] sin(t) = 0. Ma,
essendo f [X1 cos(t)] una funzione periodica pari di t, la si può approssimare con un polinomio di Fo sono nulliienti di
ordine dispari:
f [X1 cos(t)] sin(t) ' [ f0 + f2 cos(2t) + . . . ] sin(t) =
= f0 sin(t) −
f2
f2
sin(t) + sin(3t) + termini in k t con k ≥ 3 (I.57)
2
2
ove si vede che la miglior approssimazione ottenibile consiste nell’annullare i termini in sin(t) imponendo f2 = 2 f0 .
Come è noto, si ha
R arccos( XA1 )
1 Rπ
1
dt−
f0 = f0 (X1 ) = π 0 f [X1 cos(t)]dt = π a2 0
(I.58)
−a1
R π−arccos( XA1 )
arccos( XA )
2 Rπ
π 0
=
2
π
a2
R arccos( XA1 )
0
π−arccos( XA ) dt
1
1
f2 = f2 (X1 ) =
dt + a2
Rπ
= −a1 + π2 (a1 + a2 ) arccos( XA1 )
f [X1 cos(t)] cos(2t)dt =
cos(2t)dt − a1
R π−arccos( XA1 )
arccos( XA )
cos(2t)dt + a2
1
=
Rπ
π−arccos( XA ) cos(2t)dt
1
=
(I.59)
q
2
1 − XA 2
4A
πX1 (a1 + a2 )
1
da cui, imponendo
f2 (X1 ) = 2 f0 (X1 )
si ricava l’equazione non lineare che determina l’ampiezza X1 della soluzione approssimata:
s
A
A
A2
πa1
arccos( ) −
1− 2 =
X1
X1
2(a1 + a2 )
X1
4 Dovrà
essere, ovviamente, X1 > A.
(I.60)
(I.61)
30
CAPITOLO I. CIRCUITI AUTONOMI
e, nel caso in cui sia a1 = a2 = a,
A
A
arccos( ) −
X1
X1
s
1−
A2
π
=
2
4
X1
(I.62)
che non dipende da a e la cui risoluzione numerica fornisce
X1 ' 2.475 A
(I.63)
Procedendo allo stesso modo con la (I.31) e con la (I.32) , si ottiene rispettivamente:
f0 = −a +
2aX1
πA
(I.64a)
f2 =
4aX1
3πA
(I.64b)
X1 =
3πA
4
(I.64c)
e
f0 = −µA2 +
µX12
2
(I.65a)
µX12
2
(I.65b)
X1 = 2A
(I.65c)
f2 =
Bilancio della fondamentale o metodo della funzione descrittiva.
La individuazione di una sinusoide che approssima la forma d’onda generata da un oscillatore sinusoidale, effettuata finora con riferimento a equazioni differenziali del 2o ordine, può essere generalizzata al caso degli oscillatori
riconducibili allo schema di figura I.11(b), il che avviene, come vedremo, se la struttura dell’oscillatore si può rappresentare come nella figura I.39, cioè con un blocco amplificatore non lineare e non reattivo e un blocco reattivo che sia
”lineare”, non escludendo però con tale termine che possa eventualmente essere affine cioè tale produrre una grandezza di uscita Sx (t) dotata di una componente costante non dovuta soltanto al valor medio di Sw (t); questo blocco ha,
come vedremo, la funzione di filtro. Ricordando quanto osservato in occasioni precedenti dovremo dunque far sı̀ che
Sx(t)
Non lineare e
non reattivo:
S (t) = S [S (t)]
w
w
x
Sw(t)
Lineare (o affine)
e reattivo
(filtro)
Sx(t)
Fig. I.39 - Struttura di un possibile oscillatore sinusoidale a retroazione.
1. il circuito, e quindi il filtro, abbia almeno 2 componenti reattivi,
2. il circuito abbia un solo stato di riposo,
3. tale stato sia instabile con innesco oscillante.
I.3. CALCOLO APPROSSIMATO DELLE OSCILLAZIONI.
31
Ciò fatto, si cercherà di calcolare, almeno approssimativamente, la frequenza e l’ampiezza di oscillazione, ed eventualmente la purezza spettrale, la dipendenza di tali parametri dai parametri del circuito, ecc. . . . Per quanto concerne
il punto 1 non c’è nulla da aggiungere. Per quanto concerne il punto 2, indicando col pedice OP i valori di riposo,
deve essere
SwOP = G(SIN OP)
(I.66a)
SxOP = c1 SwOP + c2
(I.66b)
Le (I.66) hanno come incognite SxOP e SwOP e debbono avere un’unica soluzione la cui conoscenza consente poi di
utilizzare come variabili gli scostamenti dai rispettivi valori di riposo:
X(t) = Sx (t) − SxOP
(I.67a)
W (t) = Sw (t) − SwOP = Sw [SxOP + X(t)] − SwOP = G[X(t)]
(I.67b)
riconducendoci cosı̀ allo schema di figura I.11(b) che è il circuito equivalente per i segnali (non ”piccoli”) di quello di
figura I.11(b). Per verificare il punto 3 occorre considerare il circuito equivalente per piccoli segnali da cui ricavare
l’equazione caratteristica associata all’unico punto di riposo esistente.
Indicando le piccole variazioni con x(t), w(t), le loro trasformate di Laplace con W (s), X(s) e linearizzando la
(I.67b) si ha:
w(t) = G0 (0)x(t)
(I.68a)
X(s) = H(s)W (s) =
NH (s)
W (s)
DH (s)
(I.68b)
nell’ultima della quali sono stati messi in evidenza i polinomi in s NH (s) e DH (s), numeratore e denominatore,
rispettivamente, della funzione di trasferimento del filtro.
x(t)
w(t)
G’(0)
H(s)
W(s)
X(s)
Fig. I.40 - Equivalente per piccole variazioni dello schema di figura I.11(b).
Le (I.68) si interpretano con lo schema a blocchi di figura I.40, equivalente per i piccoli segnali nell’intorno dello
stato di riposo di quello di figura I.11(b); da esse si ricava
W (s) = G0 (0) X(s) = G0 (0)
NH (s)
W (s)
DH (s)
e quindi l’equazione caratteristica cercata è
G0 (0)NH (s) − DH (s) = 0
(I.69a)
facilmente ricavabile dall’espressione più compatta
G0 (0)H(s) = 1
(I.69b)
Una volta appurato che tale equazione assicura un innesco oscillante, è possibile che il circuito si comporti da
oscillatore sinusoidale, cioè che si instauri un regime periodico tale che la X(t) contenga un’armonica fondamentale
decisamente prevalente sulle armoniche superiori.
Supponiamo allora che la grandezza di ingresso al blocco non lineare, X(t) sia rappresentata con buona approssimazione dall’espressione
X(t) = X0 + X1 cos(ωt), X1 > 0
(I.70)
32
CAPITOLO I. CIRCUITI AUTONOMI
nella quale non deve meravigliare la presenza di un termine costante anche se X rappresenta uno scostamento dal
valore di riposo perché la nonlinearità del circuito implica in generale la presenza di armoniche di ogni ordine, e
quindi anche di ordine zero, né deve meravigliare che la fase iniziale della fondamentale sia nulla perché l’origine dei
tempi t può sempre essere scelta in modo che ciò avvenga. Ne segue che
W (t) = G[X(t)] = G[X0 + X1 cos(ωt)]
(I.71)
è una funzione periodica del tempo t con periodo T = 2π
ω ed è inoltre una funzione pari del tempo (W (−t) = W (t)).
Si potrà quindi approssimare W (t) con un polinomio di Fourier di soli coseni:
n
W (t) =
∑ Wk (X0 , X) cos (k ωt)
(I.72)
k=0
essendo, come è noto:
1
W0 (X0 , X1 ) =
π
Wk (X0 , X1 ) =
2
π
Zπ
G [X0 + X1 cos α] dα
(I.73a)
0
Zπ
G [X0 + X1 cos α] cos (k α) dα,
k≥1
(I.73b)
0
Il blocco lineare, avendo in ingresso una somma di funzioni sinusoidali, produce in uscita una analoga somma che
si sa calcolare, e cioè
n
X(t) =
∑ Wk (X0 , X1 ) · |H( j k ω)| cos[k ωt + ∠H( j k ω)]
(I.74)
k=0
Il bilanciamento armonico consiste nell’approssimare quest’ultima espressione con la (I.70) e a tale scopo occorre
innanzi tutto che nella (I.74) le armoniche superiori abbiano ampiezza trascurabile, cioè che sia
|Wk (X0 , X1 )| · |H( j k ω)| |W1 (X0 , X1 )| · |H( j ω)| ∀k ≥ 2
(I.75)
e questo evidentemente dipende sia dalla funzione non lineare G(X) che dalla funzione di trasferimento H( jω) del
filtro. Data G(X), occorrerà progettare un filtro abbastanza efficiente da realizzare l’approssimazione desiderata, ma
un’opportuna scelta della funzione non lineare può facilitare notevolmente il risultato.
Supposto che le condizioni (I.75) siano soddisfatte, rimane da confrontare X0 + X1 cos(ωt) con
W0 (X0 , X1 ) H( j 0) +W1 (X0 , X1 ) |H( j ω)| cos[ωt + ∠H( j ω)]
Poiché X1 > 0, per la loro identificazione occorre innanzi tutto che sia ∠H( jω) = 2kπ se W1 (X0 , X) > 0 e ∠H( jω) =
(2k + 1)π se W1 (X0 , X1 ) < 0 (k intero). In ogni caso, quindi, la funzione di trasferimento del filtro deve essere reale e
ciò può avvenire soltanto in corrispondenza delle pulsazioni che siano radici reali positive dell’equazione
Im {H ( jω)} = 0
(I.76)
Detta allora ω0 una tale radice e supponendo che sia l’unica radice reale positiva della (I.76), il bilanciamento
armonico dà luogo alle equazioni seguenti:
W0 (X0 , X1 )H(0) = X0
(I.77a)
W1 (X0 , X1 )H( jω0 ) = X1
(I.77b)
Si tratta di due equazioni non lineari nelle incognite X0 e X1 la cui risoluzione, insieme con la conoscenza della
pulsazione di oscillazione ω0 ricavata dalla (I.76), definisce l’oscillazione generata dall’oscillatore, nei limiti dell’approssimazione di bilanciare la sola fondamentale. Consideriamo dapprima un caso particolare ma molto significativo
delle (I.77), e cioè il caso in cui sia X0 = 0 e quindi esse si semplifichino in:
W0 (X1 )H(0) = 0
(I.78a)
I.3. CALCOLO APPROSSIMATO DELLE OSCILLAZIONI.
33
W1 (X1 )H( jω0 ) = X1
(I.78b)
a prima delle quali risulta soddisfatta se W0 (X) = 0 e/o H(0) = 0. Si ricade quindi in questo caso particolare ogni qual
volta si sceglie di realizzare una funzione di trasferimento H( jω) di tipo passa-banda, ma si può anche ricordare che
se la funzione G(X) è dispari, cioè G(−X) = −G(X) risultano nulli tutti i coefficienti di Fourier di ordine pari di W (t)
(W0 = W2 = W4 = · · · = 0) e quindi non solo la (I.78a) è soddisfatta anche con una funzione di trasferimento H( jω) di
tipo passa-basso, ma le specifiche di progetto del filtro diventano meno restrittive perché è sufficiente attenuare quanto
basta le armoniche di ordine ≥ 3 anziché di ordine ≥ 2. Rimane allora un’unica equazione non lineare (la (I.78b)) che
determina l’ampiezza X1 dell’oscillazione, la quale si può porre nella forma
W1 (X1 )
H( jω0 ) = K(X1 )H( jω0 ) = 1
X1
(I.79)
avendo definito la funzione K(X1 ) che viene detta funzione descrittiva della nonlinearità. Si noti che la (I.79) e
la (I.76) si possono fondere nell’unica equazione seguente.
K(X1 )H( jω) = 1
(I.80)
Essa infatti può essere soddisfatta soltanto se H( jω) è reale, essendo reale K(X1 )(5 ).
Complementi.
• La definizione di funzione descrittiva di un blocco non lineare si può estendere anche al caso in cui in esso siano
presenti anche elementi reattivi: basta pensare a una definizione sperimentale e cioè di applicare all’ingresso
del blocco grandezze sinusoidali con diversi valori delle ampiezze e delle frequenze e di misurare ampiezza e
fase della fondamentale in uscita. Da ogni misura si deduce il rapporto fra i fasori rappresentativi delle due
grandezze sinusoidali e quindi, per punti, si ottiene una rappresentazione di una funzione descrittiva complessa.
In tal caso la (I.80) non richiede più che l’argomento di H( jω) sia un multiplo di π, ma che sia multipla di 2π
la somma degli argomenti della funzione descrittiva del blocco non lineare e della funzione di trasferimento
del blocco lineare. Ne consegue che la frequenza di oscillazione dipende anche dall’amplificatore e non più
soltanto dal filtro: ciò non è favorevole al progetto di un buon oscillatore perché il filtro può essere passivo
e quindi realizzato con componenti assai più precisi e stabili nel tempo di quanto non lo siano i parametri
dei dispositivi elettronici necessariamente presenti nell’amplificatore. L’uso di amplificatori con effetti reattivi
trascurabili almeno nell’intorno della frequenza di oscillazione è dunque favorevole alla stabilità della frequenza
stessa.
• Per gli oscillatori descritti dalla (I.18) si ha
Z X
G(X) = −
f (u)du
H(s) =
0
s
s2 + 1
H(0) = 0
(I.81a)
pertanto il bilanciamento
1
1
1
K(X1 ) =
= jω +
= j ω−
H( jω)
jω
ω
(I.81b)
si soddisfa con
ω=1
Ma
K(X1 ) =
5 Tale
1 2
·
X1 π
K(X1 ) = 0
(I.81c)
G[X1 cos(t)] cos(t)dt
(I.81d)
Z π
0
proprietà della funzione descrittiva deriva dall’aver assunto che il blocco amplificatore attivo non lineare sia privo di effetti reattivi.
34
CAPITOLO I. CIRCUITI AUTONOMI
e, integrando per parti,
2
K(X1 ) =
πX1
[G[X1 cos(t)] sin(t)]π0 −
Z π
0
sin(t)G [X1 cos(t)][−X1 sin(t)]dt
0
=−
2
π
Z π
0
f [X1 cos(t)]
=
1 − cos(2t)
1
dt = f1 (X1 ) − f0 (X1 ) (I.81e)
2
2
e quindi la seconda delle (I.81c) coincide con la (I.60),cioè la soluzione approssimata X(t) ' X1 cos(t) è la
stessa.
I.3.b
Oscillazioni di rilassamento.
da fare
I.4
I.4.a
Esempi di oscillatori sinusoidali.
Oscillatore a ponte di Wien.
R2
R1
_
Vy
+
Vx
R3
C3
C4
R4
Fig. I.41 - Oscillatore a ponte di Wien.
È un oscillatore ”RC”, cioè senza induttori; con riferimento al modello di Fig. I.41(6 ), la funzione Vy = F(Vx ) è
quella ben nota di un operazionale che satura a ±VM in configurazione non invertente cioè, ponendo G0 = F 0 (0) =
1 + R2 /R1 :
G V se |Vx | ≤ VM /G0
|G0Vx +VM | − |G0Vx −VM | 0 x
=
(I.82)
Vy =
2
VM
se |Vx | ≥ VM /G0
mentre la funzione di trasferimento del 2-porte lineare è
H(s) =
Vx (s)
sR3C4
=
2
Vy (s) (R3C3 R4C4 )s + (R3C3 + R4C4 + R3C4 )s + 1
(I.83)
dalla cui restrizione all’asse immaginario
H( jω) =
1 − ω2 (R
jωR3C4
3C3 R4C4 ) + jω(R3C3 + R4C4 + R3C4 )
(I.84)
si ricava che la frequenza di oscillazione è
f0 =
6I
1
√
2π R3C3 R4C4
(I.85)
resistori e i condensatori costituiscono un ponte di impedenze con gli ingressi dell’opamp sulla diagonale di rivelazione mentre l’uscita e
la massa rappresentano la diagonale di alimentazione: di qui il nome.
I.4. ESEMPI DI OSCILLATORI SINUSOIDALI.
35
Per trattare formule più semplici, senza peraltro rinunciare ai concetti fondamentali, consideriamo d’ora in poi il caso
particolare in cui R3 = R4 = R, C3 = C4 = C e quindi
sRC
H(s) = 2 2 2
(I.86a)
R C s + 3RCs + 1
jωRC
H( jω) =
(I.86b)
2
2
1 − ω R C2 + j3ωRC
1
f0 =
(I.86c)
2πRC
Dalla (I.86a) si può riconoscere che l’equazione differenziale del circuito in esame è
R2C2V̈x + RC[3 − F 0 (Vx )]V̇x +Vx = 0
(I.87)
F 0 (Vx )
nella quale
= dF(Vx )/dVx si ricava dalla (I.82). Normalizzando il tempo rispetto a tN = RC e ponendo X =
Vx /VM , la (I.87) diviene
Ẍ + f (X)Ẋ + X = 0
(I.88)
ove
f (X) =
3 − G0 se |X| < 1/G0
3
(I.89)
se |X| > 1/G0
che è la (I.27) con i parametri a1 = G0 − 3 = R2 /R1 − 2, a2 = 3 e A = 1/G0 . Ricordando quanto fu allora osservato si
deduce che
• se G< 3 lo stato di riposo è stabile,
• se G> 5 l’innesco delle oscillazioni è esponenziale,
• per l’innesco sinusoidale occorre 3 < G0 < 5,
• poiché il valore di a2 = 3 è maggiore di 2 e non è modificabile, la forma d’onda dell’oscillazione nell’intorno
dei suoi massimi e dei suoi minimi è costituita da archi di tipo esponenziale, il che compromette la somiglianza
della forma d’onda con una sinusoide.
0.4
0.3
0.2
0.1
-0.1
-0.2
-0.3
0.2
15
20
25
30
15
20
25
30
-0.2
-0.4
G0=3.01
G0=4.99
Fig. I.42 - Esempi di oscillazioni ricavati dal modello di Fig. I.41; le linee a tratteggio indicano l’ampiezza
approssimata ottenuta risolvendo la (I.61): Vy1app ' 0.4VM .
A quest’ultimo difetto si può ovviare introducendo nel circuito una nonlinearità progettabile in modo che l’ampiezza dell’oscillazione non faccia saturare l’operazionale. Un esempio appare nella figura I.43: utilizzando l’approssimazione del cortocircuito virtuale e ponendo R2a + R2b = R2 , si riconosce facilmente che il guadagno F 0 (Vx )
vale 1 + R2 /R1 per Vx = 0 e mantiene praticamente il medesimo valore fintanto che le correnti nei diodi sono trascurabili rispetto alla corrente in R2b , il che avviene per |Vx | sufficientemente piccolo; viceversa, se |Vx | è abbastanza
grande da rendere prevalente la corrente in uno dei due diodi, il valore del guadagno si avvicina a 1 + R2a /R1 . Approssimando allora (grossolanamente) la funzione f (X) della (I.88) con una funzione del tipo (I.27), risulta ancora
a1 = R2 /R1 − 2 ma a2 = 2 − R2a /R1 ≤ 2. A titolo di esempio, il circuito di figura I.41 simulato con R2 /R1 = 2.5
e quindi a1 = 0.5, a2 = 3 produce una Vx (t) con distorsione totale di circa il 12%, mentre il circuito di figura I.43
simulato con R2a /R1 = 1.5, R2b /R1 = 1 e quindi a1 = a2 = 0.5 produce una Vx (t) con distorsione totale di circa il
5.4%; i due spettri di Vx (t) sono confrontati nella figura I.44.
36
CAPITOLO I. CIRCUITI AUTONOMI
R2a
R1
R2b
_
Vy
Vx
R3
+
C4
C3
R4
Fig. I.43 - Oscillatore a ponte di Wien modificato.
0dB
-20dB
-40dB
-60dB
2πf0=1
3
5
7
9
Fig. I.44 - Spettri simulati di Vx (t) per un oscillatore del tipo I.41 rosso e del tipo I.43 (blu); si noti anche la dipendenza
della frequenza di oscillazione dalla nonlinearità: in entrambi i casi essa è minore della (I.86c) ma nel secondo le è
più prossima.
I.4.b
Oscillatori sinusoidali di ordine superiore.
da fare
I.5
I.5.a
Esempi di oscillatori di rilassamento (multivibratori astabili).
da fare.
da fare
Capitolo II - Circuiti non autonomi
II.1
Multivibratori monostabili.
da fare
II.2
Multivibratori bistabili.
da fare
37
Indice analitico
Bilancio della fondamentale o metodo della funzione descrittiva, 30
Calcolo approssimato delle oscillazioni, 29
Complementi, 33
da fare, 36
Esempi con amplificatori operazionali, 22
Esempi con transistori, 26
Esempi di oscillatori di rilassamento (multivibratori astabili), 36
Esempi di oscillatori sinusoidali, 34
Esempi di soluzioni periodiche, 14
Esercizio, 16
Modelli a resistenza negativa, 11
Modelli a retroazione, 13
Modelli di oscillatori, 9
Multivibratori bistabili, 37
Multivibratori monostabili, 37
Oscillatore a ponte di Wien, 34
Oscillatori, 7
Oscillatori sinusoidali di ordine superiore, 36
Oscillazioni di rilassamento, 34
Oscillazioni sinusoidali, 29
Sintesi di resistori a resistenza differenziale negativa mediante componenti tripolari, 18
38