PROPRIETA' E CARATTERISTICHE DEI MATERIALI PER MAGNETI PERMANENTI
INDICE
INTRODUZIONE.................................................................................................................PG 4
CAPITOLO 1
GENERALITA' E DEFINIZIONI
INTRODUZIONE....................................................................................................PG 6
EFFETTO DEI DIVERSI MATERIALI..........................................................................PG 8
CURVA DI ISTERESI................................................................................................PG 11
Definizione di isteresi
Isteresi magnetica
Curva di magnetizzazione intrinseca
CURVA DI SMAGNETIZZAZIONE............................................................................PG 13
UNITA' DI MISURA.................................................................................................PG 15
CAPITOLO 2
RELAZIONI FONDAMENTALI DEI CIRCUITI MAGNETICI
INTRODUZIONE.....................................................................................................PG 17
ENERGIA DEL CAMPO MAGNETICO..................................................................
CAPITOLO 3
PG 20
MAGNETISMO NEI MATERIALI
MOMENTI MAGNETICI.........................................................................................PG 23
DOMINI MAGNETICI.............................................................................................PG 24
ANISOTROPIA MAGNETICA...................................................................................PG 30
ENERGIA DI ANISOTROPIA MAGNETOCRISTALLINA..............................................PG 31
1
CAPITOLO 4
TIPI DI MAGNETI
INTRODUZIONE...................................................................................................PG 35
MAGNETI CERAMICO FERRITICI..........................................................................PG 35
MAGNETI ALNICO................................................................................................PG 37
MAGNETI DI SAMARIO- COBALTO........................................................................PG 40
MAGNETI DI NEODIMIO- FERRO – BORO.............................................................PG 43
MAGNETI LEGATI..................................................................................................PG 46
CAPITOLO 5
STABILITA' TERMICA
INTRODUZIONE....................................................................................................PG 48
TEMPERATURA DI CURIE......................................................................................PG 49
INFLUENZA DELLA TEMPERATURA SULLA CURVA DI SMAGNETIZZAZIONE................................PG 51
INFLUENZA DELLE VARIAZIONI DI COMPOSIZIONE SULLE PROPRIETA'......................................PG 56
OSSIDAZIONE SUPERFICIALE................................................................................PG 58
CAPITOLO 6
MAGNETIZZAZIONE E TEST
INTRODUZIONE....................................................................................................PG 61
PROCEDIMENTI DI MAGNETIZZAZIONE...............................................................PG 61
IMPULSO MAGNETIZZANTE................................................................................PG 65
SMAGNETIZZAZIONE...........................................................................................PG 67
MISURA DELLE GRANDEZZE FONDAMENTALI.....................................................PG 68
Gaussmetro
Sonda di Hall
Spirale di Lenard
Flussometro
Tracciatori automatici di curva
2
CAPITOLO 7
APPLICAZIONI
INTRODUZIONE...................................................................................................PG 73
MOTORI A CORRENTE CONTINUA.......................................................................PG 75
MOTORI SINCRONI..............................................................................................PG 80
ATTUATORI ELETTROMAGNETICI........................................................................PG 83
ATTUATORI A BOBINA MOBILE...........................................................................PG 84
SISTEMI DI TRAZIONE (MOTORI LINEARI)...........................................................PG 85
Motori lineari a bassa accelerazione
Motori lineari ad alta accelerazione
SENSORI..............................................................................................................PG 87
CONCLUSIONE................................................................................................................PG 91
BIBLIOGRAFIA................................................................................................................PG 92
3
INTRODUZIONE
Scopo della presente tesi è quello di fornire una visione ragionata dei materiali per la produzione di
magneti permanenti e delle loro applicazioni.
L’argomento riveste un particolare interesse stante la evoluzione delle tecnologie nei diversi ambiti
industriali, ma nonostante le interessanti potenziali applicazioni non è di facile reperimento una
bibliografia estesa.
Nel lavoro svolto innanzi tutto sono state approfondite le caratteristiche dei materiali che possono
essere utilizzati come magneti permanenti, questi sono:
-Ferrite, ottenuta dalla sinterizzazione della ceramica
-Alnico, lega costituita da alluminio, nichel e cobalto
-Terre rare, delle quali le maggiormente significative sono:
-Lega di samario – cobalto
-Lega di neodimio – ferro – boro
Ferrite :viene impiegata per la produzione di magneti ceramico ferritici molto utilizzati per il loro basso
costo pur presentando minore energia magnetica ed elevata fragilità.
Alnico: magneti sviluppati sin dagli anni ’40, presentano interessanti caratteristiche per il loro
comportamento alle alte temperature, per elevati valori di induzione oltre che per una buona
resistenza alla corrosione.
Terre rare:come sopra evidenziato, le due principali famiglie di magneti appartenenti a questa categoria di
materiali sono:
-Samario – Cobalto: sono di produzione più recente, intorno agli anni ’70, frutto della
ricerca finalizzata all’individuazione di magneti ad alto tasso di coercitività con una
curva di smagnetizzazione lineare.
-Neodimio – Ferro – Boro: come quelli succitati Samario – Cobalto possono essere
considerati moderni. Essi presentano caratteristiche magnetiche molto elevate e
possono essere reperiti in ogni forma e dimensione da cui deriva una maggiore
versatilità di impiego.
L’impiego dei magneti permanenti ha avuto uno sviluppo pressoché costante con lo sviluppo della
tecnologia nei vari campi dell'automazione, dell'automotive, del controllo dei processi ecc.
4
Investigate le caratteristiche dei materiali e gli ambiti di applicazione dei magneti permanenti, lo studio si
è indirizzato all’approfondimento della loro stabilità termica e dei principi costruttivi dei circuiti magnetici;
ciò ha permesso di evidenziare il costante incremento di interesse per i magneti permanenti da parte delle
industrie ed in relazione all’evoluzione di tecnologie sempre più sofisticate in particolare nel comparto dei
sistemi di controllo in ambito non solo dei processi produttivi ma anche in quello aerospaziale
5
CAPITOLO 1
GENERALITA’ E DEFINIZIONI
Introduzione
Alcuni materiali, definiti col nome di magneti permanenti, sono in grado di esercitare una forza che
agisce a distanza tra un oggetto e l'altro. L’azione che ogni magnete esercita è particolarmente
rilevante in due zone geometricamente opposte nelle quali l’effetto è più intenso.
Tra due magneti si esercitano forze repulsive e attrattive, si possono perciò individuare due polarità
magnetiche. Polarità uguali, se avvicinate producono repulsione, invece polarità diverse provocano
attrazione. In prima approssimazione, la forza con la quale due magneti si attraggono (o respingono)
è inversamente proporzionale al quadrato della loro distanza (legge di Coulomb)
F =k
m 1×m 2
D
2
La costante k dipende dal mezzo interposto, mentre D è la distanza tra le due masse magnetiche (m 1
e m2) considerate puntiformi.
In un magnete le polarità non sono separabili, non c’è un’area all’interno del magnete in cui si
trovano solo i poli nord, o solo i poli sud,ma dividendolo in due parti, ognuna delle due parti
presenterà entrambe le polarità la suddivisione può essere ulteriormente ripetuta ma le
caratteristiche dei magneti sempre più piccoli ottenuto non variano.
Se fatta ruotare liberamente una barretta magnetizzate, essa si disporrà con uno dei poli rivolto
verso Nord e l’altro verso Sud. Viene così definita come polarità Nord l’estremità della barretta che
si rivolge verso il Nord terrestre (polo Sud magnetico) e come Sud quella opposta.
Fig 1.1
Per una spiegazione più completa dei fenomeni magnetici occorre introdurre il concetto di campo
magnetico H. Esso, si definisce come la regione dello spazio nella quale si manifestano le interazioni
tra i magneti.
6
Esso è un campo vettoriale, cioè associa ad ogni punto dello spazio un vettore, eventualmente
variabile nel tempo, il cui effetto fisico si esplica in termini della forza di Lorentz subita da una carica
elettrica in movimento, e quindi in un contesto più generalizzato su di un conduttore percorso da
corrente, oppure, per quanto riguarda i magneti,nel momento torcente che agisce su un dipolo
magnetico.
La carica q si muove con velocità v perpendicolarmente alle linee dl campo magnetico è sottoposta
appunto alla forza di Lorentz perpendicolare a sua volta al campo e al vettore velocità, essa ha
intensità proporzionale alla carica, alla velocità e alla intensità del campo:
F =q v B
Forza di Lorentz su una carica che si muove perpendicolarmente al campo
Nella formula se velocità e campo non sono perpendicolari fra loro occorre determinarne le
componenti vn e Bn .
Considerando nuovamente un conduttore percorso da corrente elettrica si otterrà ovviamente che
la forza di Lorentz su di esso è dovuta alla composizione delle forze che interessano le singole
cariche .
La forza che agisce su un conduttore percorso dalla corrente I, di lunghezza utile l e immerso in un
campo magnetico è data dall’espressione
F =i l B
Dove B rappresenta l'induzione magnetica e in cui la forza è perpendicolare al conduttore e al
campo.
Da cui deriva:
B=
F
il
in cui
F: forza perpendicolare alle linee del campo e al conduttore;
i: intensità della corrente che percorre il conduttore immerso nel campo;
l: lunghezza utile, ovvero riferita alla parte immersa nel campo.
Per quanto riguarda il singolo magnete, il momento torcente è ottenibile come il prodotto tra il
momento del dipolo magnetico m e il vettore induzione magnetica B
τ =m× B
7
La direzione del campo magnetico è data dalle linee di flusso che si muovono uscendo dal polo
Nord ed entrando nel polo Sud di un magnete
Fig. 2.1
Effetto dei diversi materiali
In ogni punto dello spazio in cui è presente un campo magnetico si definisce induzione magnetica
un vettore B, la cui ampiezza è data dal valore massimo della forza che si esercita sulla carica
esploratrice diviso per il prodotto della corrente stessa e per la lunghezza dell’elemento. Questo
vettore caratterizza in modo completo tutte le proprietà del campo magnetico. L'induzione
magnetica (densità di flusso nel SI) ,è quel fenomeno per cui un corpo, sottoposto all'azione di un
campo magnetico, si magnetizza a sua volta. Per una semplice spiegazione definisco una calamita
come composto da magneti elementari infinitesimi orientati tutti lungo una medesima direzione.
Considerando ora un corpo in cui le particelle elementari sono in ordine sparso, e perciò senza una
disposizione secondo un'unica direttrice, si nota che avvicinandogli un magnete, le particelle che
formano il corpo tenderanno ad orientarsi tutte in un verso ed esso diventa a sua volta un magnete.
La magnetizzazione può essere temporanea se, dopo poco, il corpo perde le caratteristiche di
calamita; oppure può essere permanente, se il corpo conserverà molto a lungo la sua
magnetizzazione.
L'intensità di tale fenomeno è quantificata tramite l'omonimo vettore induzione magnetica B , con
H indicheremo invece il vettore campo magnetico.
Gli effetti della magnetizzazione variano in base al tipo di materiale. L'espressione dell'induzione B
in funzione dell’intensità del campo magnetico H generante l’effetto è:
B=µ 0⋅H
Il coefficiente di proporzionalità µ è detto permeabilità magnetica della sostanza, essa viene scissa
in due fattori, il primo µ0 permeabilità del vuoto ( a cui corrisponde anche quella dell’aria) e µr che
è il rapporto tra µ misurata e µ0 chiamata permeabilità relativa caratteristica della sostanza.
8
Se interessa studiare le proprietà intrinseche del materiale in esame, bisogna scindere in B la parte
dovuta al campo generante B0 da quella B1 dovuta alla magnetizzazione, il che significa di sottrarre
alla misura di B la forza magnetica H che si avrebbe in ogni punto dello spazio occupato dal
magnete se si togliesse il materiale magnetico stesso.
B=B0 B1= µ0 H J
Essendo J=4πM la polarizzazione proporzionale ad H allora si può scrivere:
J = H
E allora
B=µ 0 H µ 0 H =µ H
dove:
µ= µ0 1− χ
χ è detta suscettività magnetica.
La misura dell’induzione magnetica B e della forza magnetica H permette di distinguere i materiali in
base ai valori di χ in:
•Diamagnetici
χ <0
(µr<1)
•Paramagnetici
χ >0
(µr>1)
•Ferromagnetici
χ >>0
(µr>>1)
Le sostanze diamagnetiche sono quelle i cui atomi non hanno momento magnetico, l’applicazione di
un campo magnetico provoca, per la legge di azione e reazione, una variazione della distribuzione
delle correnti elettroniche che tende ad opporsi al campo applicato; esse subiscono una forza
magnetica netta che tende a respingerle verso la regione di spazio in cui il campo magnetico è meno
intenso. Le sostanze paramagnetiche sono invece quelle formate da atomi che hanno un momento
magnetico proprio, il campo applicato tende quindi ad allinearli; a questo effetto si sovrappone
9
sempre una componente diamagnetica. Questa sostanze vengono attratte verso la regione di spazio
in cui il campo è più intenso.
Sono ferromagnetiche invece le sostanze la cui struttura permette un allineamento spontaneo dei
momenti magnetici; queste tendono ad aumentare il campo magnetico in cui sono immerse e sono
quindi attratte verso le regioni di spazio in cui il campo è più intenso, lo studio del loro
comportamento all’applicazione di un campo magnetico porta alla conoscenza del ciclo di isteresi.
Curva di isteresi
Definizione di isteresi
L'isteresi è la caratteristica di un sistema di reagire in ritardo alle sollecitazioni applicate e in
dipendenza dello stato precedente
Fig. 3.1
Se la risposta di un sistema con isteresi viene rappresentata in un grafico in funzione di uno stimolo
ripetuto ciclicamente, si ottiene una caratteristica curva chiusa. Si assiste ad uno sdoppiamento
della curva. Percorrendo la curva ottenuta nei due versi, si hanno due cammini diversi, nei quali si
possono osservare due tratti a pendenza diversa che rappresentano i limiti di saturazione.
Isteresi magnetica
Il fenomeno dell'isteresi è tipico dei materiali ferromagnetici. Quando un campo magnetico viene
applicato ad un materiale di questo tipo, si ha una sorta di memorizzazione. Se si aumenta il campo
applicato fino ad un valore positivo di saturazione di H e poi lo si porta a zero, si ottiene che il
materiale presenta una densità di flusso permanente positiva in assenza di induzione, ovvero
10
rimane magnetizzato.
Invertendo la direzione del campo, la parte di esso residua contrasta il campo applicato e per un
preciso valore di H, detto campo coercitivo [HC], la densità di flusso è nulla. Superato questo punto il
flusso inizia a salire nella direzione del campo applicato fino a giungere a saturazione. Ripercorrendo
il ciclo in senso opposto il fenomeno si manifesta specularmente.
La magnetizzazione residua o rimanenza [Br] può essere un problema perché per esempio mantiene
attratta l'ancora di un relè al cessare del segnale di comando. È possibile comunque eliminare
questa magnetizzazione residua, portando il materiale magnetizzato alla temperatura di Curie, alla
quale si distrugge l'allineamento dei momenti magnetici del materiale. L'isteresi è anche una delle
cause di dissipazione di energia nei trasformatori. Per questi motivi il fenomeno deve essere tenuto
in considerazione nella progettazione di componenti elettrici e può essere attenuato scegliendo
materiali a bassa isteresi. D'altro canto lo stesso fenomeno è sfruttato in diverse importanti
applicazioni. È alla base della memorizzazione magnetica in nastri e hard disk.
Un materiale con alti valori di coercitività (compresi nell’intervallo tra 500-3000 A/m) è detto
magneticamente duro, in quanto si oppone all’inversione della magnetizzazione e tende ad essere
polarizzato in modo costante con asse magnetico nord-sud fisso; questo genere di materiale si
presta pertanto ad essere impiegato come magnete permanente.
I materiali con Br e Hc circa uguale a 0 vengono detti materiali magnetici dolci.
11
Fig 4.1
Facendo riferimento alla figura 4.1, si può analizzare il comportamento di un materiale magnetico al
variare della forza magnetica H ad esso è applicata, si misura cioè l’induzione B in funzione di H.
Se il materiale magnetico è smagnetizzato (non genera cioè alcun campo magnetico) il suo stato è
rappresentato dal punto O (B=0,H=0), aumentando gradatamente H aumenta B secondo la curva
OA, detta curva di prima magnetizzazione, per H via via crescente la curva si può approssimare ad
una retta parallela alla retta B=µ0H.
L’intensità di magnetizzazione M, non aumenta più ad un certo punto e il suo contributo
all’induzione B cessa, il materiale è nello stato di saturazione.
L’intersezione del prolungamento di quest’ultima retta con l’asse delle ordinate è detta
magnetizzazione di saturazione (Jsat=4πMsat).Diminuendo a questo punto H fino a valori negativi, e
facendola poi variare ciclicamente ottengo una curva i cui punti notevoli oltre a B sat e Hsat sono la
rimanenza Br che è il punto di intersezione della curva con l’asse B, la forza coercitiva H cb che è il
punto di intersezione della curva con l’asse H.
Si nota che se un magnete non viene magnetizzato a saturazione, risulta bassa anche la forza
coercitiva, c'è la possibilità che il punto di lavoro possa spostarsi sotto il ginocchio, causando una
smagnetizzazione irreversibile, a questo punto il materiale necessità di una rimagnetizzazione . La
forza coercitivà è infatti definita come la capacità di un magnete di resistere a campi smagnetizzanti
esterni, il suo massimo si raggiunge come già accennato a saturazione, minore è il valore di questa
grandezza è maggiore sarà la sua tendenza a perdere la magnetizzazione.
Quando è necessario che il magnete crei un campo inferiore a quello corrispondente alla
saturazione, il procedimento corretto è magnetizzare prima a saturazione, poi applicare un campo
opposto mediante impulsi smagnetizzanti di opportuna intensità, fino ad ottenere il valore di
induzione desiderato.
Curva di magnetizzazione intrinseca
Sottraendo punto per punto ad ogni valore di B il corrispondente valore di µ0H si ottiene la curva J
in funzione di H, questa curva, in figura J=f(H), è detta curva di magnetizzazione intrinseca . I suoi
punti notevoli sono la rimanenza (Jr=Br) e la forza coercitiva intrinseca (Hci) ottenuta
dall’intersezione della curva con l’asse H.
J =B−µ 0 H
M=
J B
= −H
µ 0 µ0
12
Curva di smagnetizzazione
Nelle applicazioni il magnete permanente deve creare un campo magnetico ed è quindi sottoposto
alla forza magnetica da esso generata. La parte di curva di isteresi che dà la risposta del magnete ai
campi smagnetizzanti è quella contenuta nel secondo quadrante e viene detta curva di
smagnetizzazione.
Anziché riportare le curve BH per ogni materiale si preferisce riportare nei grafici, sui quali vengono
tracciate le curve di smagnetizzazione, iperboli che sono il luogo dei punti BxH costante, in modo da
leggere agevolmente (BxH)max. In un circuito magnetico, il volume di magnete necessario alla
creazione di un certo campo in un determinato traferro è inversamente proporzionale al prodotto
BdxHd, di qui la convenienza a progettare il circuito magnetico in modo tale che le coordinate BdxHd
del punto di lavoro coincidano con i valori che danno (BxH)max.
Fig 6.1
Dalla curva di smagnetizzazione si possono trarre interessanti proprietà riguardanti il corretto
impiego dei magneti.
Sottoponendo un magnete permanente magnetizzato ad un campo smagnetizzante di intensità H1
l’induzione magnetica assume valore B1 corrispondente al punto A1 della curva di isteresi.
Riportando ora H fino a 0, l’induzione non assume più il valore Br, ma raggiunge B’, seguendo il
tratto A1CB’ che si stacca nettamente dalla curva di smagnetizzazione, ripristinando il campo –H1,
l’induzione torna sensibilmente al valore B1, seguendo ora il percorso B1DA1. La curva A1CB’DA è
detto ciclo di isteresi minore, e per gli scopi pratici può essere approssimato ad una retta la cui
pendenza coincide con quella della curva nel punto Br. Se portiamo il campo da H1 ad un valore tra
H1 e 0, la B corrispondente sarà sul tratto A1CB’, in pratica sulla retta A1B’.
13
Se H si dovesse spostare oltre il punto di curvatura, detto “ ginocchio”,si produce una
smagnetizzazione irreversibile e il materiale deve venire eventualmente rimagnetizzato.
Fig. 7.1 Curva di smagnetizzazione indicante anche i cicli di isteresi minori
Facendo assumere ad H un opportuno valore Hsm, poi riportandola a 0, si può fare in modo che il
ciclo di isteresi minori si chiuda in O,si è annullata così l’induzione magnetica
e quindi la
polarizzazione magnetica: la calamita risulta perciò smagnetizzata, ma solo macroscopicamente,
poiché i magnetini elementari non sono più nello stato disordinato come nella calamita vergine.
Una vera smagnetizzazione si ottiene sottoponendo il magnete a campi magnetici alternativamente
oscillanti tra valori positivi e negativi tendenti lentamente e regolarmente a 0, lo stato microscopico
è però in questo caso differente da quello derivante da una smagnetizzazione ottenuta portando il
magnete sopra la temperatura di Curie del materiale costituente.
14
Unità di misura
Particolarmente importante è il weber [Wb] , unità di misura del flusso. Infatti la gran parte delle
macchine elettriche basa il proprio funzionamento sulla legge generale dell'induzione
elettromagnetica. Si definisce 1 weber la quantità di flusso che, variando in un secondo, produce nel
circuito concatenato una f.e.m. pari ad 1 volt :
1[Wb] = 1[V] · 1[s]
I valori che può assumere il flusso variano dai milliweber a pochi weber, secondo la potenza ed il
tipo di macchina interessata.
In diretta relazione col flusso abbiamo la densità di flusso (o induzione magnetica) la cui unità di
misura è il tesla (oppure il weber / metroquadro). Si definisce 1 tesla l'induzione prodotta dal flusso
di 1 weber attraverso una sezione di 1 metroquadro :
1T =
1W b
1 m2
I valori che l'induzione può assumere variano da qualche decimo a poco meno di 2 tesla, secondo la
potenza ed il tipo di macchina interessata.
Il flusso autoconcatenato con un circuito dipende dal coefficiente di autoinduzione (induttanza
elettrica) del circuito stesso la cui unità di misura è l' henry. Si definisce 1 henry l'induttanza di quel
circuito che, se percorso da una corrente di intensità 1 ampere, determina 1 weber di flusso
autoconcatenato :
1[ H ]=
1[ W b ] 1[ V ]⋅1[ s ]
=
=1[ Ω ]⋅1 [ s ]
1 [ A]
1[ A]
I valori che l'induttanza può assumere di un circuito variano dai millihenry a qualche henry,
secondo la forma del circuito ed il mezzo materiale nel quale esso è immerso.
L'induzione magnetica in un determinato mezzo viene determinata dalla presenza nel mezzo di un
campo magnetico H . A sua volta il campo magnetico è quasi sempre originato da una corrente
circolante in un avvolgimento e, come è facile dedurre dalla legge di Biot-Savart, si misura in
ampere / metro . Si definisce 1 ampere / metro quel campo magnetico che produce nel vuoto una
induzione pari a 4·µ·10-7 = 1,257·10-6 tesla.
I valori di campo magnetico internamente alle macchine elettriche possono variare da qualche
ampere / metro a qualche centinaia di migliaia di ampere / metro.
15
Il valore dell'induzione, oltre che dall'intensità di campo magnetico, dipende anche dalla
permeabilità magnetica assoluta del mezzo la cui unità di misura è :
µ=
B [ W b/m2 ] [ H ]
=
H
[ A/m ]
[m ]
Il valore di µ varia da µ0 = 1,257·10-6 [H / m] a qualche decina di migliaia di µ0 , secondo il tipo di
mezzo.
Per finire giustifichiamo l'unità di misura della riluttanza magnetica :
R= N⋅I
[ A]
[ A]
1
1
−1
=
=
=
=[ H ]
[W b ] [V ]⋅[ s ] [ Ω ]⋅[ s ] [ H ]
16
CAPITOLO 2
RELAZIONI FONDAMENTALI DEI CIRCUITI MAGNETICI
Introduzione
Chiamo circuito magnetico quello spazio in cui le linee di forza del vettore B si avvolgono per la
maggior parte della loro lunghezza entro materiali magnetici. Considero allora un circuito magnetico
consistente in un magnete permanente e una coppia di espansioni polari in ferro dolce che
delimitano il traferro.
Fig. 2.1
Siano Lm la lunghezza e Sm la sezione (che si suppone essere costante) del magnete e analogamente
Lt e St la lunghezza e la sezione del traferro. Per un primo calcolo si trascurano i flussi dispersi, cioè
assumiamo che le linee di flusso si richiudano su se stesse passando tutte per l’area St del traferro.
Ciò permette di scrivere che il flusso nel traferro è uguale a quello del magnete Φt=Φm. Poichè
Φ=BS quando il flusso è uguale su tutta la sezione abbiamo:
Φ t=B t S t =Bm S m =Φ m
Per il teorema della circuitazione:
∮l H t d l=Σ i j
La circuitazione di H lungo un qualunque percorso chiuso è uguale alla corrente concatenata (legge
di Ampere), per corrente concatenata si intende quella che attraversa la superficie associata al
percorso l.
17
Nel caso di un magnete da solo posto in aria, la somma delle correnti i j è nulla, perciò la somma
delle tensioni magnetiche agenti sul circuito si otterrà da:
H t Lt H m L m=0
Si nota che Ht è di segno opposto a Hm, cioè la forza magnetica agente sul traferro è opposta a
quella all’interno del magnete : un traferro agisce quindi come forza smagnetizzante. Le due
formule sono corrispondenti ai principi di Kirckhoff per il circuito elettrico seguente, realizzato in
base alle corrispondenze date nella generalità partendo dal circuito iniziale, cioè :
i R m=i R t
La corrente che entra in un nodo è uguale a quella che esce (primo principio).
Fig 2.2
Il secondo principio, assieme alla legge di Ohm, inducono a scrivere VAB-VBA=0.
Le supposizioni fatte finora, e cioè che il vettore induzione sia costante nella sezione e che il vettore
rappresntante il campo magnetico sia parallelo al percorso di circuitazione, però sono solo una
prima appaossimazione della realtà, solitamente vengono introdotti perciò i fattori F e f, determinati
in base all’esperienza o con calcoli più precisi ad elementi finiti (F.E.M) vengono raggruppati
secondo classi con caratteristiche omogenee.
Si ottengono così:
F=
Bm S m
Bt S t
e
f=
H m Lm
H t Lt
18
Tenendo conto che Bt=µ0Ht allora si possono riscrivere le precedenti come:
Sm=
F µ0 H t St
Bm
L m=
f H t Lt
Hm
Dalle quali si ottiene:
V m=S m L m=
f F µ0 H 2t V t
Bm H m
Per un dato materiale e per un dato volume del magnete stesso esistono due coppie di valori B m e
Hm (e quindi Lm e Sm)che soddisfano esattamente l’equazione. Se però Bm e Hm coincidono con Bd e
Hd rappresentativi del punto a BHmax, il volume del magnete necessario a creare un dato H t sarà il
minimo possibile.
Si avrà dalla combinazione delle equazioni di Sm e Lm:
B m=
F S t Lm
µ H
f S m Lt 0 m
Tale equazione è rappresentata dalla linea OP1 e chiamata retta di lavoro, la cui pendenza è indicata
dalla cotangente che essa forma con l’asse B, e il punto P1 di intersezione con la curva è detto punto
di lavoro del magnete.
tg =−
F St Lm
f s m Lt
Fig 3.2
19
In fase di progetto si cerca di fissare il punto P1 coincidente col punto di (BH)max, per poi impiegare
la minima quantità di materiale magnetico; se però durante il suo funzionamento il magnete è
sottoposto a campi smagnetizzanti esterni, oppure viene variato il traferro, il punto di lavoro P1 può
spostarsi in P2 e al ripristino delle condizioni iniziali il punto di lavoro diviene P3, questa causa a
volte una notevole perdita di flusso. F assume generalmente valori da 2 a 5, mentre f varia da 1,1 a
2 a seconda della struttura del circuito.
Come già accennato, un circuito magnetico con traferro può essere smagnetizzato se viene
sottoposto a un ciclo di temperatura, una variazione di questo parametro, infatti, determina un
restringimento o un abbassamento della curva di isteresi. Poiché la retta di lavoro è individuata
unicamente dalle dimensioni geometriche del circuito magnetico, si sposterà solamente la posizione
relativa del punto di lavoro sulla curva di smagnetizzazione, se questo verrà a trovarsi al di sotto del
ginocchio della curva, si avrà smagnetizzazione.
Quindi, il magnete permanente dovrà essere magnetizzato, nella maggior parte dei casi, solamente
dopo il suo montaggio nel complesso. Quando è richiesta una grande stabilità occorre progettare il
circuito magnetico funzionante nel punto P3; dopo la magnetizzazione il punto di lavoro diverrà P1;
si sottopone allora il complesso al ciclo P1P2P3 (applicando una forza smagnetizzante ∆H, o
sottoponendolo ad un ciclo di temperatura).
Energia del campo magnetico
L'integrale
∫ H d B sul
piano B-H è la misura dell’energia che può essere immagazzinata da un
magnete permanente. La magnetizzazione spontanea da sola causa un campo all’interno del
materiale, essa però non permette al magnete di produrre lavoro in forma di campo applicato
all’esterno. Mentre l’anisotropia magnetocristallina, cioè la caratteristica di magnetizzarsi secondo
assi preferenziali, è un requisito desiderato in un materiale per essere magnetico, l’energia associata
ad un campo magnetico applicato dall'esterno è necessaria al magnete per immagazzinare energia e
produrre lavoro. Questa energia immagazzinata dovuta ad un campo esterno viene indicata con la
notazione Ef. L’energia immagazzinata in un volume V di un magnete può essere scritta come:
E f =−µ0 V M H
Consideriamo ora che una variazione di energia sia causata da una variazione di H:
d E f =−µ0 V M d H −µ 0 V H d M
20
Il primo termine rappresenta il lavoro fatto per effetto della variazione del solo campo esterno, il
secondo termine rappresenta l’energia associata al cambiamento di direzione dei momenti
magnetici.
Questa differenza rappresenta l’energia dissipata come energia termica presente nel materiale.
Se il materiale è sottoposto ad un ciclo completo e quindi torna alle sue caratteristiche iniziali allora:
∮ d E f =0
−µ0 V ∮ M d H − µ0 V ∮ H d M =0
Sostituendo B=µ 0 H M
allora:
−V ∮ B− µ0 H d H −V ∮ H d B−µ 0 H =0
−V [ ∮ B d H −∮ µ0 H d H ]−V [ ∮ H d B−∮ µ0 H d H ]=0
Tornando al valore iniziale di H dopo un ciclo completo :
∮ µ 0 H d H =0
allora l’equazione si riduce a :
−∮ B d H −∮ H d B=0
Il primo termine dà il lavoro svolto dal campo applicato per unità di volume del materiale, mentre il
secondo termine è l’energia dissipata come energia termica interna per unità di volume.
L’espressione dà la variazione totale dell’energia immagazzinata dovuta ad un campo esterno, si può
anche considerare il caso in cui non si ritorni allo stesso punto di partenza, ma ci si sposti lungo al
curva da un punto iniziale ad un punto finale:
a
a
∫ B d H ∫ H d B=[ B H ]ab
b
b
21
Fig.4.2
Nella figura, il punto a rappresenta il materiale magnetizzato al punto di saturazione, si passsa poi al
punto b in cui l’energia potenziale è nulla, il materiale quindi non può svolgere alcun lavoro e opera
nelle condizioni di rimanenza. Per liberare l’energia immagazzinata il magnete si deve muovere nel
secondo quadrante dove H diventa negativa, ma B è ancora positiva ( il magnete è soggetto ad una
forza di smagnetizzazione).
Considerando al variazione da b a c, l’energia totale rilasciata dal magnete incrementa con la
variazione di energia potenziale –BH. Scendendo ancora, il valore di B arriva ad annullarsi in d, dove
l’energia potenziale è uguale a 0. Il prodotto B⋅H raggiunge un picco negativo nel secondo
quadrante detto di massima energia prodotta (BH)max, il suo valore limite si ottiene come:
− B H m a x = µ0
M sat 2
2
Il valore (BH)max è direttamente proporzionale alla magnetizzazione di saturazione e corrisponde alla
sua coercitività intrinseca, esso rappresenta il valore della densità di energia magnetica per un dato
volume di materiale, tra i punti Br e Hcb esso raggiunge un punto massimo (BH)max,punto di massima
energia magnetica accumulata e serve da costante di materiale per la valutazione dei materiali
magnetici permanenti.
22
CAPITOLO 3
MAGNETISMO NEI MATERIALI
Momenti magnetici
Per l’interpretazione dei fenomeni magnetici nei materiali si parte dal presupposto che ad ogni
atomo o molecola della sostanza magnetica,sia associato un momento magnetico (m) che deriva dal
momento magnetico di spin dell’elettrone (come noto,l’elettrone possiede oltre alla carica elettrica
e, un momento magnetico intrinseco µm ),e dal il momento magnetico orbitale degli elettroni, cioè
da come sono disposti nella materia, esso è una proprietà microscopica del materiale che permette
di prevederne il comportamento magnetico.
Un semplice modello della maggior parte dei materiali magnetici è un largo array di elettroni, questi
materiali appaiono smagnetizzati se il loro momento magnetico del dipolo è orientato casualmente.
Quando un campo magnetico H è applicato al materiale, il momento magnetico tende a fare
ruotare il materiale verso la direzione di H, quando tutti i momenti sono allineati il materiale ha
raggiunto il suo campo di saturazione. Questo meccanismo non è comunque sufficiente per creare
un magnete permanente, che deve essere in grado di mantenere un proprio flusso magnetico in
assenza di qualsiasi campo esterno comportando così uno spontaneo allineamento dei momenti
magnetici dei dipoli (magnetizzazione spontanea Is). Il campo autogenerato detto di Weiss Hw
(dell’ordine di grandezza di 12,5 104 A/m) e proporzionale alla magnetizzazione spontanea (Hw=NwIs)
, genera interazioni che tendono ad allineare e a disporre parallelamente (ferromagnetismo [a]) o
antiparallelamente (ferrimagnetismo [b]) gli spin elettronici. L’allineamento è completo allo zero
assoluto, dove con n atomi per centimetro cubo, Is assume il massimo valore I0=nµm. All’aumentare
della temperatura, l’allineamento è disturbato dall’agitazione termica, cosicché la magnetizzazione
spontanea decresce all’aumentare della temperatura finché alla temperatura di Curie il sistema è
completamente disordinato [c].
a
b
c
d
Fig. 1.3
23
Tenendo valida l’ipotesi della disposizione parallela dei momenti magnetici elementari, risulta che
per invertire il senso di magnetizzazione è necessario applicare un campo dell’ordine di 12,5 104
A/m.
In realtà però si osserva che è sufficiente un campo molto debole, spesso dell’ordine di
qualche A/m. La spiegazione di ciò, e più generalmente del fatto che un pezzo di materiale
magnetico esiste allo stato non magnetizzato mentre un debole campo magnetico può produrre la
saturazione magnetica, è stata data da Weiss con l’introduzione dell’ipotesi dei domini magnetici.
Domini magnetici
Il concetto di dominio magnetico è di fondamentale importanza nel ferromagnetismo, perché la
grandezza del dominio individuale è influenzata dalle proprietà magnetiche del materiale in esame.
Al di sotto di una temperatura critica, per minimizzare l'energia totale i materiali assumono una
struttura a domini, vale a dire si suddividono in regioni di diversa forma e dimensione all’interno
delle quali gli spin sono tutti allineati tra loro . Essi possono contenere dai 10 4 ai 1021 atomi, e sono
magnetizzati spontaneamente, cioè, come già detto con tutti i momenti magnetici elementari
disposti parallelamente o antiparallelamente, l’intensità di magnetizzazione dipende dalla
temperatura a cui è sottoposto il materiale. La suddivisione in numerosi domini riduce il campo
smagnetizzante esterno rendendo minima l'energia magnetostatica. La suddivisione dei domini
avviene per mezzo di pareti dette di Bloch, regioni in cui la magnetizzazione passa gradualmente
dall'orientazione di un dominio a quella dell'altro, ciò minimizza l'energia di scambio tra i dipoli
magnetici.
Fig.2.3
Bloch wall
Fig.3.3
24
La magnetizzazione del campione può avvenire o per rotazione dei domini, o per la crescita di un
dominio a spese degli altri adiacenti, cioè per il movimento delle pareti divisorie; questa è la
soluzione che richiede minore energia,
variano le dimensioni dei vari domini, ma la loro
orientazione rimane inalterata.
Il movimento delle pareti di Bloch, può essere ostacolato da vari fattori quali:
•Grado di difettività (difetti puntiformi, dislocazioni e conseguente incrudimento, giunti di
grano, ecc)
•Presenza di inclusioni diamagnetiche
Considerando invece la magnetizzazione che avviene per rotazione di domini, si pensa ad un
reticolo cristallino contenente un largo numero di domini. In assenza di un campo applicato, c’è
un’orientazione
casuale di questi ultimi, che non da origine ad una magnetizzazione. Con
l’applicazione di un campo H si ha una graduale rotazione dei momenti magnetici dei domini fino
all’allineamento col campo applicato, producendo una magnetizzazione M nella medesima
direzione.
E’ importante uno studio dei fattori che influenzano le grandezze fondamentali dei domini al fine di
garantire la produzione di domini ad alte prestazioni. L’energia immagazzinata dal campo in un
dominio è la stessa che in un volume V di un magnete:
E f =−µ0 V M H
µ0= Permeabilità magnetica del vuoto
V= Volume considerato
M=Magnetizzaizone
H=Campo magnetico
Che derivata permette di ottenere la variazione di questa energia come:
d E f =−µ0 V M d H −µ 0 V H d M
25
Anche in questo caso, il primo termine identifica l’energia legata alla variazione del campo esterno,
mentre il secondo è l’energia interna associata al cambiamento di direzione del momento
magnetico.
Considerando un volume semplice che individua un singolo dominio spontaneamente magnetizzato
[figura a], si osserva che tutti i momenti magnetici interni sono allineati, quindi una variazione di
energia interna è dovuta unicamente al primo termine.
[a]
[b]
Fig 4.3
Se invece il volume è suddiviso in più domini separati [figura b], anche in questo caso
spontaneamente magnetizzati, ma in direzioni opposte, il primo termine dell’equazione contribuirà
in maniera più ridotta del caso precedente essendoci un contributo del secondo termine dovuto al
mutamento delle direzioni di magnetizzazione dei momenti magnetici attraverso le pareti divisorie
tra i domini. In questo caso però l’energia è notevolmente ridotta poiché lo spazio in cui si
racchiudono le linee di forza è molto minore. Un mutamento della direzione di 180° è molto
comune nei materiali utilizzati per la produzione di magneti permanenti.
E' da evidenziare che con un’introduzione di domini prismatici triangolari, i così detti domini di
chiusura, nei quali la magnetizzazione forma un angolo di 90° con i domini verticali, l’energia
magnetica è zero, poiché non si hanno poli magnetici liberi (Fig. 5.3)
Questa disposizione sembra eliminare il campo esterno, in realtà la creazione delle chiusure
individuali dei domini pur riducendo il campo esterno applicato e quindi la sua energia, crea una
energia interna che va a variare il momento magnetico in direzione permettendo un'allineamento
spontaneo dei questi ultimi.
26
Fig. 5.3
La configurazione naturale è quella a energia totale minima e, siccome è necessaria una certa
quantità di energia per introdurre una parete di Bloch, si raggiungerà una posizione di equilibrio in
cui l’energia necessaria per formare una parete in più è uguale alla riduzione dell’energia del campo
esterno.
E’ possibile partendo dalla curva di magnetizzazione definire quale delle due cause è predominante
nei vari punti della curva. La presenza di spostamenti irreversibili delle pareti di Bloch è la
spiegazione della curva di isteresi e dell’esistenza del magnetismo permanente.
Fig. 6.3
I cambiamenti di magnetizzazione sono discontinui, sono una serie di piccoli salti conosciuti come
salti di Barkhausen. Esaminando il diagramma energetico (Fig 7.3) in cui è riportata l’energia
potenziale di una parete di Bloch in funzione della sua posizione nel reticolo cristallino si osserva
che in assenza di campi esterni la posizione della parete sarà quella cui compete un minimo
dell’energia (punto A).
27
Fig 7.3
Considerando la figura 7.3, applicando un campo magnetico, la magnetizzazione risulta reversibile
fino a che la posizione della parete non oltrepassa il punto B (punto A della curva di
magnetizzazione Fig 6.3) dopo di che avremo nuove posizioni di equilibrio (A’,A’’), ognuna delle
quali corrisponde ad un salto di Barkhausen e hanno carattere irreversibile (tratto AB curva
magnetizzazione). La rotazione dei domini avviene quando il campo applicato non coincide con la
direzione preferenziale di magnetizzazione dei domini e richiede una forza molto maggiore rispetto
a quella necessaria per lo spostamento della parete, quindi avviene per ultima nel processo di
magnetizzazione.
Per capire il significato pratico delle pareti di dominio, è di aiuto considerare uno specifico esempio
di una sfera di raggio r magnetizzata uniformemente, contenente un campo uniforme, se si tratta di
un singolo dominio, si devono valutare le condizioni per cui esso si divida in due domini emisferici
magnetizzati in maniera opposta.
Definisco N [0<N<1], detto fattore smagnetizzante dalla:
H i= H 0 −N M
Che permette di ottenere il campo interno Hi nel caso in cui le particelle sono spontaneamente
magnetizzate in presenza di un campo esterno Ho, il prodotto di N con la magnetizzazione M dà il
campo auto smagnetizzante della particella magnetica.
Tornando al caso in esame, N=1/3 per la sfera e assumendo un campo esterno H 0 uguale a 0 quando
la particella è spontaneamente magnetizzata
28
1
−M
H i= H 0 − M =
3
3
risulta:
Questa è utilizzata per calcolare l’energia immagazzinata come:
E f =µ 0 V
M2
3
4
3
E dato il volume della sfera V = 3 π r allora l'energia magnetica risulta:
E f=
4π
2 3
⋅µ0 M r
9
Quando si introduce una parete di dominio, la magnetizzazione in entrambe le emisfere non sarà
uniforme, diventa perciò più difficile da calcolare l’energia del campo, che risulta ridotta rispetto al
caso precedente.
Il decremento di Ef
nel caso vi sia il doppio dominio si otterrà sostituendo nell’equazione
4π
precedente una costante δ al termine 9 .
La creazione di una parete di area πr2 introdurrà un’energia proporzionale alla superficie πr2γ, così
l’energia totale scambiata risulterà:
E =π r 2 γ −δ µ0 M 2 r 3
E’ possibile perciò definire un raggio critico rc per il quale questa energia è uguale a 0.
r c=
πγ
2
δ µ0 M
Se il raggio della nuova regione è più grande del raggio critico, l’energia scambiata sarà negativa,
perché l’introduzione della parete ridurrà l’energia immagazzinata, dalla creazione di un nuovo
dominio si otterrà uno stato più stabile. Al contrario se r<rc, l’introduzione di una nuova parete
incrementerà l’energia immagazzinata e quindi non è favorita la creazione di un nuovo dominio.
Queste informazioni sono usate per la preparazione dei materiali che verranno impiegate nella
produzione dei magneti permanenti. E’ preferibile non avere pareti di dominio a causa del fatto che
le particelle sono magnetizzate spontaneamente e il massimo campo esterno è derivato da esse. Un
magnete con alta coercitività dovrebbe essere prodotto con forte anisotropia magnetocristallina
29
ottenuta attraverso l’allineamento dei momenti magnetici nel reticolo cristallino. Molti tipi di
magneti permanenti sono fatti riducendo il diametro dei grani in modo da favorire la presenza di un
unico dominio. La forza coercitiva aumenta con l’aumentare delle tensioni interne locali ed è in
accordo con l’osservazione che le leghe contenenti fasi precipitate sono magneticamente dure, per
questo spesso vengono introdotte nel materiale delle impurità al fine di migliorarne le
caratteristiche magnetiche.
Anisotropia magnetica
La magnetizzazione di un ferromagnete tende a giacere su certi assi cristallografici, detti assi facili.
Contributi all'anisotropia magnetica sono:
•Anisotropia magnetocristallina
•Anisotropia di forma (magnetostatica)
•Magnetostrizione
•Anisotropia indotta
L'anisotropia magnetocristallina riguarda la struttura del reticolo cristallino dei vari materiali,
l'allineamento dei dipoli magnetici è ottenuta dall'applicazione di un campo magnetico; essi
risultano così orientati verso un'unica direzione permettendo alle proprietà magnetiche di
svilupparsi in prevalenza lungo questa direzione preferenziale. Prendendo per esempio in
considerazione il ferro, che è l'elemento principale in molti dei magneti più diffusi, si nota che ha
una struttura cristallina cubica a corpo centrato. Ci sono perciò sei direzioni preferenziali
equivalenti per la magnetizzazione: [1,0,0][0,1,0][0,0,1][-1,0,0][0,-1,0][0,0,-1].
Per quanto riguarda l'anisotropia di forma, essa si basa sulla forma dei grani, dalla formula
precedentemente descritta ( Hi=H0-NM), si osserva che l'andamento di N è appunto dovuto a
questo; N=0 è il limite per cui il campo smagnetizzante è assente, se N tende a zero, le particelle
hanno una forma allungata e fine e vengono magnetizzate lungo il loro asse più lungo, per N=1 si
hanno particelle a forma di dischi molto sottili (o piatti) magnetizzati normalmente al loro piano.
Sul piano B-H si può pensare che se un magnete permanente ha un comportamento circa lineare
nel secondo quadrante, le sue proprietà sono determinate dall'anisotropia magnetoscristallina,
invece, quando in questa regione il comportamento è altamente non lineare esso dipende
dall'anisotropia di forma.
La Magnetostrizione è una forma di anisotropia dovuta all'azione di un campo elettrico, che
provocando la rotazione dei dipoli, genera delle piccole variazioni nelle dimensioni geometriche per
accoppiamento magnetoelastico fra dipoli e reticolo cristallino.
30
L'anisotropia indotta è l'effetto complementare dell'accoppiamento magnetoelastico, le
sollecitazioni meccaniche favoriscono alcune direzioni di magnetizzazione dal punto di vista
energetico.
Energia di anisotropia magnetocristallina
L’energia necessaria alla formazione dei domini di chiusura è essenzialmente determinata
dall’anisotropia del cristallo, cioè l’energia associata alla magnetizzazione dipende dalla direzione
secondo la quale è applicata la forza magnetizzante. Essa deriva dall’accoppiamento tra lo spin e il
momento orbitale dell’elettrone. Molti magneti sono prodotti in maniera tale da presentare la
maggior parte delle proprie proprietà magnetiche lungo un asse preferenziale, questo perché è
proprio interesse del costruttore una generazione del campo in una determinata direzione. Si può
determinare l’asse preferenziale del reticolo cristallino, ricordando che esso avrà energia minima
per unità di volume quando M e m sono allineati, dall’equazione:
2
E=− µ0 m M 1−2 s i n ϑ 2
m= Momento magnetico
M= Vettore magnetizzazione
ϑ2=Angolo tra M e m
E’ possibile ora definire l’energia dell’anisotropia magnetocristallina per unità di volume [Ek]come
l’energia richiesta per ruotare m di un angolo ϑ rispetto all’asse preferenziale (ϑ=0) Ek:
E k =2 µ0 m M s i n 2ϑ
2
Considerando nuovamente come elemento per la produzione di magneti il ferro, si può osservare
come già accennato che esso ha il reticolo cristallino in forma cubica a corpo centrato, ci sono
perciò sei assi di magnetizzazione preferenziali uguali , quindi, la direzione parallela agli spigoli [100]
è una delle direzioni preferenziali.
31
La Fig 8.3 mostra le curve di magnetizzazione per un monocristallo di ferro nelle direzioni degli assi
[100],[110] e [111] a temperatura ambiente, le unità di misura sono arbitrarie
Per i magneti viene definita una costante cristallografica:
K 1=8 µ0 m M
e allora :
Ek =
K1
s i n2 2 ϑ
4
K1 è un parametro fondamentale che contiene informazioni sulla convenienza del materiale da
utilizzare nei magneti essendo ricavato dai valori di permeabilità magnetica e dal valore del vettore
magnetizzazione, Ek come già accennato è l'energia dell'anisotropia magnetocristallina.
Considerando nuovamente l’esempio di un volume elementare di ferro già magnetizzato
spontaneamente lungo la sua direzione preferenziale [100]. Indicando la saturazione del materiale
M=Msat ,applichiamo una forza esterna di magnetizzazione H con angolo ϑ0, cioè lo stesso dell'asse
preferenziale considerato. Se essa è grande a sufficienza da generare un campo di saturazione,
allora tutti i momenti magnetici ruoteranno di ϑ verso una direzione intermedia. La componente M
di Msat lungo la direzione del campo applicato H sarà:
M =M s a t c o s ϑ 0−ϑ
Sommata all’energia Ek associata alla struttura del reticolo cristallino, c’è l’effetto del campo H la cui
energia immagazzinata dall’elemento è:
E f =− µ0 M s a t H c o s ϑ 0−ϑ
32
La totale energia anisotropica si ottiene dalla somma delle due come:
E=E k E f =
K1
s i n2 2 ϑ − µ0 M s a t H c o s ϑ 0−ϑ
4
Le proprietà magnetiche ottimali si ottengono con Msat allineato con l’asse preferenziale, nei
magneti permanenti, questo allineamento è in grado di resistere ad un campo esterno opposto che
tende a smagnetizzare il materiale.
Si può definire a questo punto come campo coercitivo Hc l’intensità di campo necessaria a
demagnetizzare completamente un magnete, più questo valore sarà elevato, più il magnete sarà in
grado di mantenere la magnetizzazione quando viene esposto ad un campo magnetico di segno
opposto. Esso viene anche detto coercitività intrinseca del materiale e per ϑ=0
Si distingue come già accennato nei capitoli precedenti tra campo coercitivo Hcb con riferimento alla
densità del flusso magnetico e campo coercitivo intrinseco Hci con riferimento alla polarizzazione. Se
un magnete viene esposto ad un’intensità di campo demagnetizzante pari ad Hbc, la sua densità di
flusso magnetico scompare, il magnete in sé non ha perso la sua magnetizzazione, ma la densità di
flusso magnetico da lui prodotta è uguale ed opposta alla densità del flusso magnetico prodotta dal
campo smagnetizzante, così che esse si neutralizzano a vicenda. Solamente con una intensità di
campo pari a Hci il magnete perderà la sua polarizzazione magnetica e perderà completamente la
sua magnetizzazione.
Fig. 9.3
33
Quando viene applicato un campo di capacità –Hc (ϑ=π) la magnetizzazione va da +Msat a –Msat, un
ulteriore incremento nel campo inverso, mantiene comunque il livello di saturazione a –Msat.
Se il campo applicato viene nuovamente invertito con +Hc, la magnetizzazione torna da –Msat a +Msat
e si mantiene a quel livello anche con un incremento dell’intensità del campo, in questo modo si è
estrapolata una caratteristica intrinseca della magnetizzazione, la grandezza di Hcb è la misura del
magnetismo permanente dei materiali ed è relazionato alla saturazione Msat
Il grafico puramente teorico poiché rappresenta un modello semplificato, non da informazione su
quanto deve essere elevato il valore di Hcb per ottenere il valore di Msat, ma permette di ottenere
assieme all’equazione :
B=µ 0 H M
il grafico di densità di flusso, dal quale si possono carpire informazioni circa i parametri
comunemente utilizzati.
Fig 10.3
M ha sempre valori costanti di +Msat o –Msat, così, la pendenza della curva del grafico è
semplicemente µ0. Il valore di B quando la forza di magnetizzazione ha valore 0, è chiamata
rimanenza Br=µ0Msat.
34
CAPITOLO 4
TIPI DI MAGNETI
Introduzione
Le caratteristiche magnetiche del materiale sono, come già precedentemente detto, in funzione
dell’anisotropia magnetocristallina e della forma dell'elemento (anisotropia di forma). In entrambi i
casi le caratteristiche ideali sono fondate sul concetto di magnetizzazione spontanea e questa teoria
è certamente una buona approssimazione anche per i singoli cristalli. Va evidenziato però, che nella
realtà i materiali non seguono queste condizioni ideali, è infatti necessario un campo H per
magnetizzare e portare a saturazione il materiale. Questo processo è lo stesso per tutti i materiali
utilizzati, quali ferro, nichel cobalto e in generale tutte le leghe per la produzione di magneti
permanenti. Un semplice materiale ferromagnetico è isotropico, non ha perciò assi preferenziali e le
proprietà in una specifica direzione vengono date o aumentate durante il processo di produzione
del magnete stesso.
Magneti ceramico ferritici
Magneti prodotti con la tecnologia della ceramica, nascono come magneti economici, soprattutto
per la grande disponibilità di materia prima, pur avendo minore energia magnetica e maggiore
fragilità, essi sono i magneti più utilizzati nelle svariate applicazioni.Essi basano il loro magnetismo
permanente sulla anisotropia magnetocristallina. Durante il processo di lavorazione, le polveri
vengono macinate fino a raggiungere le dimensioni circa di un singolo dominio. Questo meccanismo
produce un magnete con alta coercitività.
Le calamite sono una forma naturale di questi magneti, la cui formula è Fe3O4 (ossido di ferro). Il
reticolo cristallino cubico a corpo centrato tipico del Fe puro (che presenta magnetizzazione
spontanea in una delle sei direzioni preferenziali) nel caso del Fe3O4 è sostituito dalla struttura
cubica a facce centrate a causa della presenza dell’ossigeno come impurità. L’utilizzo delle impurità
è fondamentale nella formazione di materiali magnetici artificiali. La struttura dei moderni magneti
permanenti è molto più complicata di quella appena presentata, la ferrite presenta una struttura
cristallina esagonale con alto grado di anisotropia magnetica.
La loro composizione chimica è (SrxBax-1)Fe12O19 detta ferrite allo stronzio o al bario a seconda del
metallo alcalino terroso impiegato. La sua funzione è quella di legare l’ossigeno ai reticoli esagonali,
questa composizione è formata miscelando le corrette proporzioni di ossido di ferro e carbonato di
Ba o Sr e facendo avvenire la reazione a circa 1000°-1350°C. Le polveri opportunamente trattate e
macinate vengono compresse a secco o a umido, con o senza campo magnetico per essere poi
sottoposte alla sinterizzazione finale ad alta temperatura (1200°-1300°). Il prodotto ottenuto, fragile
e molto duro viene poi portato alla dimensione desiderata attraverso rettifica con mola diamantata.
35
Se l’oggetto da produrre è un magnete anisotropo, le particelle vengono allineate durante la
pressione da campi magnetici applicati tra le cavità dello stampo, viene preferito, in questo caso,
l’utilizzo di una miscela di polveri liquida contenente anche del lubrificante per favorire lo
spostamento delle polveri.
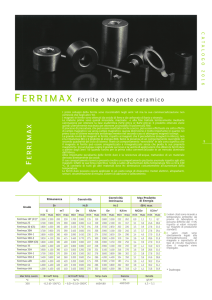
[a] Curva caratteristica magneti in ferrite di Bario
[b]Curva caratteristica magneti in Stronzio Ferrite
[c]Curve caratteristiche alle varie temperature
Fig. 1.4
36
Magneti Alnico
Sviluppati nei primi anni ’40 , i magneti Alnico sono tutt’ora utilizzati in alcune applicazioni. La
caratteristica principale è il comportamento alle alte temperature, oltre ad elevati valori di
induzione e resistenza alla corrosione. Possono essere realizzati particolari di grandi dimensioni
I magneti vengono prodotti mediante il processo di fusione e colata nelle forme richieste, attraverso
procedimento particolari si può favorire una crescita direzionale dei grani, infatti, le particelle con
una forma allungata presentano una maggiore coercitività lungo il loro asse maggiore, questo
fenomeno è conosciuto come anisotropia di forma. Questo è il meccanismo dominante nei magneti
permanenti di questo tipo, nei quali le particelle magnetiche vengono fatte precipitare in una
matrice di Alluminio, Nichel e Cobalto e Ferro, da qui deriva il nome Al-Ni-Co . I magneti hanno una
struttura a grani grossi, sono duri e fragili e possono essere lavorati solo con rettifica.
Vi possono essere molte varianti nella produzione della lega, e questo produce diverse
caratteristiche magnetiche. Il passaggio più critico del processo di produzione dei magneti Alnico, è
il trattamento a caldo della lega, in cui si assiste alla precipitazione delle particelle nella matrice
debolmente magnetica. Durante il raffreddamento possono essere individuate tre fasi α1, α2 e γ.
L’obbiettivo è quello di ottenere la fase a1 della matrice Al-Ni-Fe entro la quale è dispersa la fase α2
di Co-Fe.
Fig. 2.4
La terza fase, si presenta nel raffreddamento dai 1200°C ai 900 °C circa, mentre intorno ai 600 °C la
fase α si scompone nelle altre due viste in precedenza e le particelle della lega Co-Fe iniziano a
crescere ed allungarsi.
La corretta proporzione dei materiali di base, è fusa in un forno ad induzione e poi colata in uno
stampo di terra da fonderia o resina che ha circa le dimensioni finali del magnete. Il processo di
formatura prevede un rapido raffreddamento a circa 250 °C/min per assicurarsi che i componenti
della miscela non si separino.
37
Un particolare tipo si questi magneti è l’Alnico 5 DG, esso è un materiale di struttura colonnare con
la direzione di crescita dei grani indotta dagli stampi preriscaldati nella direzione preferenziale, con
alla base dello stampo una superficie fredda in modo che la variazione della temperatura sulle
pareti dello stampo, sia graduale.
Fig. 3.4
Nel caso in cui siano da produrre magneti di piccole dimensioni, il processo di fusione non risulta
conveniente. In questi casi vengono utilizzate le tecnologie metallurgiche delle polveri. I costituenti
del materiale vengono perciò macinati fino a ridurli in polveri a bassa temperatura di fusione , e
dopo averle mescolate vengono pressate in stampi dalla forma richiesta. Questa sinterizzazione
avviene ad una temperatura appena inferiore a quella del punto di fusione della lega. La densità
finale del magnete ottenuto per sinterizzazione è leggermente inferiore a quella del magnete
ottenuto per fusione, differenza che viene evidenziata dalla minori proprietà magnetiche dei primi.
Il costo sostenuto per le attrezzature per la produzione di questi, è inoltre, molto più elevato ; essi
presentano però una più uniforme distribuzione dei grani e questo li rende meccanicamente più
resistenti di quelli ottenuti per fusione.
A causa della bassa forza coercitiva i magneti Alnico debbono venir magnetizzati solo dopo il
montaggio. Per la magnetizzazione, tenendo in conto che parte del flusso magnetico è assorbito dal
circuito in ferro della struttura, è necessario un campo di 4-6 volte la forza coercitiva.
La magnetizzazione richiede un tempo brevissimo, nel caso di magnetizzazione a scarica di
condensatori bisogna però tener conto che la massa metallica, per effetto delle correnti parassite
che insorgono a contrasto, assorbe dell’energia , l’impulso perciò, non deve essere troppo breve.
Campi magnetici esterni causano facilmente una smagnetizzazione parziale, con quest'ultimo
procedimento è possibile portare il campo generato a valori stabili nel tempo.
I magneti Alnico hanno un’ottima stabilità termica, la variazione dell’induzione di -0,02% / °C, è
lineare e reversibile fino a temperature abbastanza elevate.
38
Un riscaldamento eccessivo, però, può indurre un calo irreversibile della forza magnetica che può
essere recuperata con la rimagnetizzazione. Superando però la temperatura di 540°C una modifica
della fase strutturale rende il magnete inutilizzabile. Per migliorare le proprietà magnetiche, si può
procedere con l’aggiunta di altri componenti nella lega, ad esempio, il rame per esempio migliora le
proprietà magnetiche del materiale, e poi comune aggiungere un 5%-8% di titanio, che riduce la
rimanenza e aumenta la coercitività. L’Alnico 8, che è il più utilizzato di questo tipo di magneti è
composto da Al-Ni-Fe-Co-Ti. (Permanent magnet materials and their applications, Peter Campbell)
[a] Curve caratteristiche Alnico 5 – 6
[b]Curve caratteristiche Alnico 8 - 9
[c]Stabilità delle curve caratteristiche dei magneti Alnico al variare della temperatura
Fig 4.4
39
Magneti samario cobalto
I primi magneti SmCo risalgono agli anni ’70, nati dal desiderio di ottenere un magnete con alta
coercitività e con un comportamento circa lineare della parte di curva B-H posta nel secondo
quadrante. Questa caratteristica è rispettata nei materiali con forte anisotropia magnetocristallina,
ottenuta con l’utilizzo di particelle che hanno circa la dimensione di un singolo dominio. Fin dal
1960 si sono ricercati altri materiali oltre alla ferrite che permettessero una alta anisotropia uni
assiale in concomitanza con un’elevata saturazione magnetica. Furono così individuate per la
produzione di magneti permanenti le terre rare, le più leggere delle quali sono più favorevoli alla
combinazione con il Co, e tra queste in particolare il Samario (Sm). La lavorazione dei magneti
ottenuti da terre rare e cobalto, permette la formazione di leghe intermetalliche quali RCo5, R2Co17,
R2Co7, R5Co19, RCo3; R sta ad indicare il simbolo della terra rara utilizzata.
RCo5 fu il primo di questi composti ad essere studiato interamente e le prime predizioni teoriche
individuarono l’alta energia massima prodotta, vennero comunque incontrate numerose difficoltà
per la produzione di un magnete soddisfacente, anche a causa dell’elevata reattività delle terre rare,
ad eccezione del SmCo5.
La caratteristica di questi materiali è quella di dover avere le pareti di separazione dei domini di
spessore molto ridotto, questo conferisce un’energia per unità di area molto elevata e un’alta
coercitività.
Quest’utlima è rappresentata dalla capacità del magnete di mantenere la sua
magnetizzazione originale quando viene applicato un campo esterno in direzione opposta, ma una
volta che si sono formati i nuclei dei domini inversi, il movimento delle pareti di dominio permetterà
una magnetizzazione dei grani in senso opposto, smagnetizzando il magnete. L’alta coercitività in un
magnete di questo tipo, chiamato nucleatico, deve perciò essere presente soprattutto ai bordi dei
grani in modo da prevenire il movimento delle pareti di dominio da un grano all’altro. I magneti
prodotti da terre rare, nella realtà, sono sistemi multifase con microstrutture interne molto
complesse e sebbene la fase primaria dovrebbe essere SmCo5, i bordi dei grani sono i siti in cui vi è
una variazione di questa composizione la quale permette un bloccaggio del movimento delle pareti
di dominio.
I materiali costituenti la lega vengono macinati e miscelati e trasformati in magnete utilizzando le
tecniche metallurgiche delle polveri, simili a quelle utilizzate per i magneti ceramico – ferritici. Le
polveri vengono allineate con l’applicazione di un campo orientato quando esse sono compresse e
sinterizzate a circa 1100°C per aumentarne la densità. Le variazioni di composizione ai bordi dei
grani vengono migliorate attraverso un trattamento di post-sinterizzazione a caldo, e allineate a
circa 900°C, questo permette di ottimizzare il bloccaggio delle pareti di dominio e massimizzare
perciò la coercitività del SmCo5.
40
Fig. 5.4
Inizialmente, dall’osservazione del diagramma di fase, si notò che il composto Sm2Co17 aveva una più
alta saturazione magnetica del precedente, ma a questo non si accompagnava un’alta coercitività.
Varie variazioni di composizione vennero fatte per migliorarne le proprietà, aggiunta di ferro per
migliorare Msat e zinco per aumentare il valore di Hc. La composizione dei moderni materiali è
tipicamente Sm(Co,Fe,Cu,Zr)7+x.
Una post-sinterizzazione crea una struttura in celle, la quale viene migliorata dall’aggiunta di rame
Cu, questa fase del processo è molto critica perché si assiste alla variazione di composizione
all’interno delle pareti delle celle. Il composto Sm2Co17, non è come il SmCo5 cioè controllato da
processi di enucleazione, perciò non può contare sui bordi dei grani per bloccare il movimento delle
pareti di dominio (nucleation type), ma si affida alle pareti delle celle della fase SmCo 5 che svolgono
la stessa funzione di bloccaggio; i materiali che presentano questo comportamento sono detti di
magneti controllati da processi di ancoraggio (pinning type). Le differenze di microstruttura tra i
primi [a] e questi ultimi [b], nei magneti di Samario Cobalto, è mostrata nella seguente figura.
Fig 6.4
41
Sebbene la procedura di lavorazione sopra esposta sia la più utilizzata esistono approcci alternativi.
Un metodo più diretto, è il processo di riduzionediffusione; che risulta anche più economico per via
del fatto che vengono utilizzati gli ossidi delle terre rare. Questi ultimi vengono ridotti a metallo con
il calcio e diffusi nelle polveri di cobalto. Dopo aver mescolato i costituenti, la reazione viene fatta in
atmosfera di argon o idrogeno attorno ai 1150°C. Quando il metallo Sm si è diffuso nelle polveri di
cobalto, vengono fatti tre passi successivi per separare dal composto il CaO:
1.Una reazione con l’acqua
2.una reazione con l’idrogeno
3.una reazione con un acido per eliminare tutte le tracce di Ca
Dopo l’asciugatura le polveri di SmCo5 sono pronte per la macinatura e nella formatura finale nella
dimensione desiderata.
Ultimamente, grazie a nuove scoperte nella produzione di questo tipo di magneti, essi sono venuti
ad occupare una posizione di rilievo per quanto riguarda il futuro delle industrie dei motori ad alte
prestazioni nell’industria automobilistica e non solo. I nuovi processi di produzione sono liberi da
sostanze chimiche dannose e facilmente scalabili in modo da soddisfare le esigenze delle industrie
in crescita. Oltre ad offrire elevate prestazioni alle alte temperature essi sono superiori ad altre
classi di materiali adatti per la costruzione di magneti permanenti. A differenza dei tradizionali
metodi di produzione e tecniche metallurgiche che forniscono un controllo limitato delle dimensioni
e della forma delle particelle magnetiche, si è riusciti a realizzare un metodo di produzione di nano
particelle a forma allungata come lame che consentono un più efficiente assemblaggio e di
conseguenza un leggero aumento delle prestazioni. Tale forma delle particelle si rileva utile nel
trattamento dei magneti anisotropici che sono molto ricercati in molte applicazioni commerciali,
l’obbiettivo è quello di realizzare un materiale più energicamente efficiente e più leggero.
(Permanent magnet materials and their applications, Peter Campbell; Guida ai magneti permaneti,
Giancarlo Franceschetti)
42
Magneti di neodimio-ferro-boro
Sono assieme a quelli di samario cobalto i più recenti nel campo dei materiali magnetici,
posseggono caratteristiche magnetiche molto elevate e si trovano in ogni forma e dimensione. Gli
impieghi sono quelli in cui sono richieste ottime proprietà magnetiche con dimensione dei
componenti ridotte.
L’utilizzo dei magneti samario cobalto è stato limitato in questi anni a causa del costo di produzione
e della difficoltà nel reperire le materie prime. Inizialmente si cercò una soluzione per avere ottime
proprietà magnetiche ad un costo più ridotto; provando con l’utilizzo di ferro in una matrice di
cobalto e terre rare (R2Fe17), ma le temperature di esercizio di questi prodotti erano troppo basse
per l’utilizzo nelle applicazioni. Dagli anni ’80 a seguito di una scoperta, l’ R 2Fe17 venne trasformato
in un composto ternario R2Fe14B con forma tetraedrica simmetrica e una forte anisotropia
magnetocristallina uni assiale. Questo composto aveva una temperatura di Curie molto più elevata
di quelli ottenuti fino ad allora, circa 200 - 300°C e rendeva il materiale adatto all’utilizzo in più
applicazioni con un maggiore range di temperature di utilizzo.
Un veloce sviluppo si è avuto per il composto Nd 2Fe14B, pensato quello con la saturazione
magnetica più alta e con una Tc superiore a 300°C, questo fu possibile anche a causa
dell’abbondanza di neodimio e quindi di un costo di produzione minore.
Questo composto ternario è la base per la moderna famiglia dei magneti di questo tipo ed è
conosciuto come magnete al neodimio – ferro –boro. Da questa, attraverso varie sostituzioni
parziali e modifiche nella composizione si ottengono vari tipi di magneti con particolari
caratteristiche a seconda delle applicazioni. Siccome il cobalto presenta una maggiore Tc rispetto al
ferro, è abitudine sostituire questo in parte in modo da migliorare le caratteristiche globali alle alte
temperature, anche se questo causa una riduzione della coercitività del magnete, che può
comunque essere significativamente migliorata attraverso una parziale sostituzione del neodimio
con terre rare più pesanti come ad esempio il diprosio [Dy]. Questo è il motivo per cui il Dy2Fe14B ha
una più alta anisotropia rispetto al composto di partenza, ma presenta anche un accoppiamento
antiferromagnetico col rame il quale riduce la saturazione magnetica e l’energia prodotta dal
magnete (BH)max.
In molte applicazioni queste sostituzioni parziali vengono fatte contemporaneamente, bilanciando
l’un l’altra gli effetti negativi che produrrebbero le altre se fatte separatamente. I benefici introdotti
dagli elementi addizionali, sono a volte negati a causa dell’elevata complessità a produrre una lega
con elementi diversi rispetto al composto ternario di base.
43
Anche in questo caso è molto comune il metodo di produzione per riduzione/diffusione; in questo
caso il processo è di co-riduzione fatto nel vuoto e seguendo lo stesso procedimento dei magneti di
samario cobalto.
Le polveri di Nd-Fe-B macinate sono allineate attraverso un campo orientato e poi pressate in uno
stampo dove avviene la sinterizzazione e la formatura nelle dimensioni desiderate. Molte volte
all’interno della composizione è presente un fase secondaria posta sui bordi dei grani che non ha
proprietà magnetiche. Anche in questo caso i bordi dei grani fissano le pareti dei domini come
avviene per l’SmCo5 , questo tipo di magnete perciò appartiene anch’esso alla famiglia dei
nucleatio-type.
Una radicale differente alternativa al processo di produzione di riduzione/diffusione è conosciuta
come melt spinning o più diffusamente rapid quenching, nella quale una verga di materiale viene
fusa e spinta attraverso un piccolo ugello sulla superficie di una ruota metallica raffreddata con
dell’acqua, producendo un sottile nastro di lega.
Fig. 7.4
Ottime proprietà derivano dalla coercitività intrinseca raggiunta, che dipende dal grado di tempra e
dalla velocità della ruota. Il nastro prodotto è largo da 1 a 3 mm e sottile 35 mm e dopo la
produzione viene macinato in polvere. Questo procedimento crea una microstruttura
estremamente fine. Spesso l’orientazione casuale della magnetizzazione dei grani rende queste
particelle isotropiche; per ottenere la loro anisotropia è richiesta l’applicazione di un campo esterno
approssimativamente uguale al valore della corcitività.
Un alto grado di anisotropia può essere impartito ai materiali pressati a caldo (circa 725°C)
utilizzando una procedura detta die-upsetting.
44
Il magnete Nd2Fe14B pressato a caldo viene trasferito in un altro stampo nella quale è sottoposto ad
una deformazione plastica a caldo che riduce la sua altezza di circa il 50%. Nello stampo è presente
un flusso magnetico trasversale alla direzione di pressatura che fa ruotare il reticolo tetragonale dei
grani fino a che l’asse magnetico principale del reticolo è perpendicolare al flusso del magnete e
parallelo alla direzione di pressatura. Il meccanismo di allineamento in questo caso è puramente
cristallografico e non dovuto all’applicazione di un campo esterno.
Fig. 8.4
Oltre ad allineare i vettori magnetici questa procedura permette di raggiungere un elevato grado di
saturazione, come avviene nel caso della pressatura a caldo, a cui corrisponde un elevata energia
(BH)max.
I magneti prodotti con questo tipo di lavorazione possono essere confrontati con quelli di Nd2Fe14B
appartenenti alla famiglia dei magneti controllati da processi di enucleazione, con la differenza che i
primi hanno una coercitività intrinseca Hc molto ridotta.
Un’ altra composizione base dei magneti trattati in questo paragrafo e il composto Nd 15Fe77B8, il
quale è conosciuto per la sua caratteristica di assorbire l’idrogeno molto velocemente; esso viene
esposto a questo gas mentre si sta espandendo velocemente e a temperature elevate, il processo è
conosciuto come Hydrogen decrepitation (HD). Intorno al 1990, è stato scoperta un’alternativa a
questo processo, il materiale viene lavorato in atmosfera di idrogeno ad elevata temperatura 750°C
circa, i grani interni di Nd2Fe14B diventano una mistura fine di NdH2,2,Fe e Fe2B; dopo aver posto il
materiale sottovuoto, così da fargli espellere l’idrogeno immagazzinato che altrimenti causerebbe
fragilità nella struttura e rottura, il composto è termicamente instabile e i grani dei costituenti
rimanenti si ricombinano in Nd2Fe14B; questa modifica del processo HD è conosciuta come
Hydrogenation, disproportionation, desorption and reconbination (HDDR). Il completo processo
HDDR converte il composto Nd15Fe77B8 da una struttura grossolana ad una struttura di grana
ultrafine avendo dimensione dei grani intorno a 0,3 micrometri, cosicchè il materiale ottenuto è più
facilmente macinabile per ottenere polveri fini.
45
Sostituzioni parziali del ferro con Co e Zr hanno l’effetto di aumentare l’anisotropia delle particelle. Il
pressaggio a caldo è la via preferita per la produzione di magneti ad alta densità. Magneti anisotropi
possono essere ottenuti attraverso due strade partendo dalle polveri ottenute con il processo
HDDR:
1.Polveri isotropiche pressate a caldo in un magnete isotropico e sottoposte a deformazione
plastica a caldo utilizzando il processo die-upset per aumentare l’anisotropia
2.Polveri anisotropiche pressate a caldo direttamente a formare un magnete ad alta densità.
Particolare da non sottovalutare in sede di utilizzo è che i magneti al neodimio presentano
limitazioni a causa della corrosione dovuta all’umidità, vanno perciò rivestiti con resine epossidiche
o tramite nichelatura.
(Permanent magnet materials and their applications, Peter Campbell; Guida ai magneti permaneti,
Giancarlo Franceschetti)
Magneti legati
I magneti legati vengono ottenuti dalla mescola di polveri magnetiche con gomme sintetiche o
resine termoplastiche ( compound) mediante stampaggio ad iniezione, compattamento a pressione
o laminazione. Hanno allargato notevolmente lo spettro di forme ottenibili.
Magneti pressati
I magneti pressati sono ottenuti per compattamento in pressa di polveri magnetiche legate con
resina epossidica. Hanno le seguenti caratteristiche:
•Resa magnetica superiore rispetto agli altri tipi di magneti legati per la minore quantità di
legante presente
•Sono molto vantaggiosi per forme semplici e grandi quantitativi
•Il pezzo pressato non necessità di ulteriori lavorazioni meccaniche
•Campo di impiego fino a 150°C
•Possono essere a base di NdFeB, SmCo e combinazioni di vari materiali. Questi ultimi
vengono detti ibridi
•Il legante resiste bene ai solventi
46
Magneti flessibili
I magneti flessibili vengono ottenuti per estrusione o laminazione di mescole di polveri con gomme
sintetiche, polietilene. Hanno le seguenti caratteristiche:
•Vasta gamma di forze magnetiche
•Possono essere a base di ferrite NdFeB o combinazioni di vari materiali (ibridi)
•Si presentano in rotoli o in fogli con grande varietà di possibili forme di magnetizzazione
•Quelli estrusi (isotropi) possono avere profili particolari, quelli laminati in rotolo possono
essere accoppiati con PVC di vario colore.
Magneti stampati ad iniezione
Sono composti da polvere magnetica ( ferrite , terre rare) e materiali sintetici termoplastici
(materiale matrice nylon, PPS). Il legante plastico e la polvere magnetica vengono mescolati in un
mescolatore a caldo o in estrusore a doppia coclea e successivamente vengono granulati per
formare il compound; il processo poi si conclude con la tecnica dello stampaggio tipico delle materie
plastiche. Hanno le seguenti caratteristiche:
•Elevata resa magnetica associata ad una eccellente resistenza meccanica
•I magneti stampati sono più resistenti e facili da maneggiare in fase di montaggio
•Dallo stampaggio si ottengono particolari già a disegno, il materiale comunque è facilmente
lavorabile in caso di necessità come la realizzazione di prototipi
•Si possono stampare particolari anche complessi
•Campo di impiego fino a 150°C
•Possono essere a base di NdFeB, SmCo e combinazioni di vari materiali (ibridi)
•Il legame resiste bene ai solventi.
47
CAPITOLO 5
STABILITA' TERMICA
Introduzione
Quando un progettista specifica l’uso di un magnete permanente, egli spera che la sua
magnetizzazione duri permanentemente o per lo meno che il suo comportamento rimange
prevalentemente invariato. Più specificatamente egli richiede che la curva di smagnetizzazione
rimanga circa invariata durante le normali condizioni di utilizzo per cui il magnete è stato progettato.
Ciò non avviene solitamente, le variazioni delle caratteristiche e delle proprietà del magnete , sono
dovute ad una combinazione di fattori esterni, quali temperatura di utilizzo, pressione e campi
esterni applicati. Queste variazioni possono essere raggruppate in tre principali categorie.
1.La prima comprende gli effetti che permangono anche dopo una totale rimagnetizzazione. Prendendo in
esame i magneti alnico, si assiste al fatto che successivamente alle lavorazioni di fabbricazione, in cui si
raggiungono temperature tra i 550-650°C, se sottoposti a temperature maggiori ai 500 °C, la composizioni
delle fasi che li compongono vengono alterate, non si può tornare perciò alla curva di smagnetizzazione
originale anche dopo ad una totale rimagnetizzazione, il magnete deve essere riprodotto.
La ferrite, così come alcuni magneti ottenuti da terre rare, non soffre di variazioni permanenti fino a
circa 1000°C, questo è dovuto all’alta temperatura di sinterizzazione, questi magneti però, hanno
limiti pratici di impiego ad alte temperature (sotto i 1000°C).
Tutti i tipi di magneti ottenuti dalla sinterizzazione delle terre rare sono suscettibili ad ossidazione
che comporta variazioni metallurgiche permanenti nella loro struttura. Le variazioni dipendono
dalla composizione della mistura utilizzata per al loro produzione, ma sono molto serie nel caso del
Nd2Fe14B, dove deve essere necessariamente introdotta una protezione dalla corrosione.
Un’altra grandezza da tenere in considerazione è la pressione che agisce sul magnete, nel caso delle
ferriti e del Nd2Fe14B ottenuto per rapidly quenching, esposizioni a pressioni diverse da quelle di
progetto possono causare seri cambiamenti nella struttura interna. Un altro esempio dell’effetto
della temperatura si ha nella matrice polimerica dei magneti legati, nella quale, oltre ad una certa
temperatura si assiste ad una facile e rapida perdita delle proprietà meccaniche del magnete.
2.La seconda categoria riguarda i cambiamento irreversibili, i quali permangono anche dopo la rimozione
delle cause che li hanno generati. E’ possibile ritornare alle condizioni iniziali attraverso una
rimagnetizzazione completa del materiale. Oltre ai campi esterni applicati un’altra principale causa di
questo tipo di cambiamenti è dovuta alla fluttuazione termica. Un’alta energia termica può causare lo
spostamento dei domini, o uno spostamento dei bordi dei grani, questo fenomeno è chiamato viscosità
magnetica.
48
3.Le fluttuazioni termiche possono causare anche minori variazioni, dette reversibile ed appartenenti al
terzo gruppo, esse sono dovute all’agitazione dei momenti magnetici all’interno del dominio. Questo effetto
causa un a momentanea perdita di saturazione magnetica, fino a che la temperatura non si porta a regime.
La temperatura di Curie
La magnetizzazione spontanea non avviene se la temperatura supera un certo calore caratteristico
del materiale, conosciuto come Temperatura di Curie [Tc]. E’ necessario, perciò, che le condizioni di
impiego siano inferiori alla Temperatura di Curie caratteristica del materiale in questione.
Normalmente però i materiali utilizzati normalmente per i magneti hanno valori di Tc relativamente
bassi:
•1120°C Cobalto
•770°C Ferro
•358°C Nichel
Il ferro è l’elemento più popolare ed economico utilizzato, ma i materiali ceramico - ferritici, di cui è
il componente principale, hanno valori di temperatura di Curie di soli 450°C, o nel caso del Nd 2Fe14B,
la temperatura scende addirittura a 300°C, per questo, viene solitamente sostituito parzialmente il
ferro col cobalto, in modo da innalzare i valori.
La magnetizzazione spontanea causa un campo nel materiale dato da B=µ0H. La magnetizzazione M
in un volume elementare ∆V di questo materiale viene definita da:
lim Σ m
M=
∆V 0
∆V
m = Momento magnetico
Che individua il momento del dipolo magnetico per unità di volume; per cui se il materiale ha n
atomi per unità di volume può in alternativa essere scritta come:
M =n m
Agitazioni termiche distruggono l’allineamento dei momenti poiché all'aumentare della
temperatura le particelle aumentano la loro energia interna muovendosi in maniera sempre più
disordinata, gli effetti sono quantificati utilizzando un meccanismo statico classico, questo fa si che
la precedente relazione si trasforma in:
M =n m c o t h m
B
KT
−
KT mB
49
Per alti campi e basse temperature si ha:
m
B
mB
∞ e c ot h
1
KT
KT
Allora in questo caso la formula ritorna al suo stato iniziale, ripresentando l'allineamento di tutti i
momenti e portando a saturazione il materiale :
M s a t=n m
La relazione generale allora può essere riscritta combiandosi con la B=µ0H come:
M =M s a t c o t h µ 0 m
Pongo
x= µ0 m
H
KT
[A]
H
KT
−
K T µ0 m H
e quindi:
M
1
=c o t h x−
M sat
x
Per cui:
M
KT
=
x
M sat
n µ 0 m2
[B]
Eliminando ora x attraverso le relazioni A e B, posso legare direttamente M alla temperatura
prendendo in considerazione
T c=
n µ 0 m2
3K
M
T
=
x
M sat 3 T c
Indicando con Tc appunto la temperatura di Curie
La magnetizzazione spontanea può verificarsi se e solo se esiste soluzione per entrambe le
equazioni:
M
1
=c o t h x−
M sat
x
e
M
T
=
x
M sat 3 T c
50
Fig 1.5
•T<Tc Esistono soluzioni
•T=Tc Temperatura critica per le soluzioni
•T>Tc Non esistono soluzioni
Influenza della temperatura sulla curva di smagnetizzazione
Un magnete permanente esposto ad una elevata temperatura presenterà una riduzione dei suoi
effetti di magnetizzazione in relazione al suo livello di saturazione. Se questa riduzione sia
reversibile o irreversibile dipende da vari altri fattori, il principale è la forza di magnetizzazione del
materiale. Quando questa raggiunge il livello di coercitività intrinseca –Hci, la magnetizzazione
cambia nella direzione opposta. Un cambiamento è irreversibile, quando si possono ristabilire le
condizioni iniziali attraverso una rimagnetizzazione applicando un campo esterno di valore
superiore ad Hc. La forza di magnetizzazione è quindi compresa nel range di valori –H ci<H<+Hci, ogni
conseguente variazione nella magnetizzazione in questo intervallo, sarà reversibile.
E’quindi di fondamentale importanza conoscere se la forza di magnetizzazione oltrepassa il valore di
Hci, il quale è però in funzione della temperatura.
51
La coercitività intrinseca di un materiale con anisotropia magnetocristallina è ricavabile da:
H c=
2
2 8 µ 0 M m 2
2Ki
m
=
=16 M
µ0 M s a t
µ0 M sa t
M sat
Con K1 si indica la costante cristallografica del materiale che ha valore 8µ0Mm2.
Se la temperatura aumenta si avrà una riduzione dell’effetto di magnetizzazione, nel grafico di fig
2.5, si riporta la famiglia di curve per un dato materiale alle varie temperature.
I magneti ceramico-ferritici per esempio basano il loro magnetismo permanente sull’anisotropia
magnetocristallina.
Fig. 2.5
Assumendo le condizioni del campo magnetico uniformi e indicando come precedentemente
accennato con N il fattore di smagnetizzazione:
H i=H o− N M
Bi =µ o M 1− N
52
Il punto operativo del magnete sulla sua curva di smagnetizzazione è definito dalla retta di lavoro
(curva di carica), la cui pendenza è derivata dall’equazione:
Bi
M 1−N
=
µ o H i H 0−N M
L’equazione di Bi, mostra che N=0 è il limite nel quale è assente il campo auto smagnetizzate, ed è
facile che esista il fenomeno della magnetizzazione spontanea,N=1 invece corrisponde alla
situazione opposta in cui il fenomeno è inesistente
il fattore di smagnetizzazione N dipende unicamente dalle dimensioni del magnete ed è costante,
così come il campo esterno H0. Nel caso in cui M sia costante, la pendenza della curva di carica
individuerà un unico punto di applicazione per il magnete definito dall’intersezione di essa con la
curva di smagnetizzazione.
Fig 3.5
Per quanto riguarda il magnete Ceramic 8, a 20°C il punto di funzionamento è [a], che è al di sopra
del ginocchio, quando la temperatura scende a – 20°C il punto di applicazione del magnete diventa
[b] che è ancora al di sopra del ginocchio di quella curva. Continuando l’operazione tra 20°C e -20°C
essa è reversibile, se la temperatura scende ulteriormente a -60°C, il punto di applicazione scende
individuando [c], appena sotto il ginocchio della relativa curva. C’è perciò un decremento di
magnetizzazione e di densità di flusso, questo è ora irreversibile.
E’chiaro che un lieve incremento nel campo smagnetizzante –Hci sarà causa di una catastrofica
perdita di M.
53
Dal completo riallineamento di M si può ristabilire la completa magnetizzazione del materiale e
ritornare a operazioni a più alte temperature come (-20 °C,+20 °C), non ci sarà, però, un ritorno alla
corrispondente maggiore curva di magnetizzazione.
I punti di applicazione d a – 20°C ed e a +20°C che stanno all’intersezione tra la curva di carica e le
rispettive curve di smagnetizzazione che assumono però minori livelli di quelle di partenza ,
rappresentano la riduzione della densità di flusso, il magnete possiede ora energia ridotta pur
potendo reagire reversibilmente a ulteriori variazioni di temperatura (maggiori di quelle delle
condizioni iniziali).
I cambiamenti del comportamento dei magnete sono in funzione della forma e dalla dimensione, le
quali devono essere tenute in considerazione per evitare escursioni termiche dannose.
Per quanto riguarda i magneti Alnico, determinare la dipendenza del loro comportamento in
funzione della temperatura, risulta molto più complicato rispetto ai precedenti magneti ferritici, la
loro coercitività intrinseca è dominata dall’anisotropia di forma e diminuisce con l’aumento della
temperatura, così come la magnetizzazione effettiva.
L’anisotropia magnetocristallina è sempre presente , nonostante il suo ruolo secondario e le
caratteristiche di questi magneti dipendono dall’esatta costituzione della lega. Essi, in generale,
presentano, rispetto alle ferriti, minori variazioni delle prestazioni e delle proprietà magnetiche ad
alte temperature.
Fig. 4.5 Curve di smagnetizzazione per un materiale ceramico ferritico alle diverse temperature di impiego
Anche nel caso delle curve di smagnetizzazione del magnete denominato Alnico5, è mostrata la
variazione della densità di flusso in funzione delle varie temperature.
54
Siccome i magneti Alnico posseggono |Hci|<Msat, è comune utilizzarli al posto delle ferriti a causa
della maggiore inclinazione della curva di carica. Una volta che il magnete ha compiuto un ciclo
completo alle varie temperature, esso non presenterà variazioni irreversibili dovute ad effetti
termici ed opererà in un range più ampio nelle condizioni di reversibilità.
Per un particolare materiale, è approssimativamente valido assegnare uno specifico valore espresso
in termini di percentuale alle variazioni reversibili del flusso magnetico per variazione unitaria di
temperatura. Questo parametro usato frequentemente è chiamato coefficiente di reversibilità
termica α. E’ovvia l’esistenza di un valore limite superiore di temperatura alla quale questo
cambiamento nel flusso magnetico non è più reversibile. I magneti di ferrite ottenuti per
sinterizzazione non subiscono variazioni permanenti fino a circa 1000°C, la magnetizzazione
spontanea viene eliminata al raggiungimento dei 450°C, cambiamento definito irreversibile.
(recupero le condizioni iniziali solo tornando a T<450°C e rimagnetizzando).La situazione nei
magneti Alnico è diversa da quella dei magneti ceramico ferritici, essi hanno una temperatura di
Curie a livelli più alti 750-800°C. Vi sarà una variazione permanente nella composizione della fase se
questi magneti vengono esposti a temperature superiori ai 500°C (un recupero delle caratteristiche
iniziali si ha in questo caso solo con la ricreazione del magnete).
55
Influenza delle variazioni di composizione sulle proprietà dei magneti
I magneti di terre rare hanno un’alta anisotropia magnetocristallina uniassiale, ma più complessa
che nel caso delle ferriti. I magneti di samario cobalto, hanno una temperatura di Curie
relativamente alta, tra i 500°C e i 700°C per SmCo5, e 780-850°C per Sm2Co17, per cui la riduzione di
magnetizzazione è leggermente minore per questi due materiali. L’andamento della coercitività in
funzione della temperatura, nei composti di terre rare leggere, non è direttamente legato a
complicazioni nel meccanismo di anisotropia magnetocristallina dovuta alla nucleazione o al
fenomeno di pinning, questo comportamento è riconducibile a livello atomico, dove le terre rare,
presentano dei momenti magnetici che sono fortemente legati all’andamento della temperatura.
Dalle curve di smagnetizzazione del samario cobalto si può osservare il declino di Hci con la
temperatura.
Fig. 5.5 Curve di smagnetizzazione per i due composti ottenuti dal samario cobalto alle varie temperature di utilizzo
Quando questi magneti fanno cicli di utilizzo al di sopra dei 200°C, vi è un’irreversibile perdita di
flusso, la variazione diventa tanto più grossa quanto più la pendenza della linea di carica diminuisce.
Magneti di terre rare con proprietà più stabili alle alte temperature possono essere prodotti con
sostituzioni parziali degli elementi costituenti. Vi sono delle terre rare pesanti, utilizzate nei
composti con il cobalto come Gb, Tb, Dy, Ho e Er le quali presentano differenti dipendenze dei loro
momenti dalla temperatura perché i loro atomi presentano legami magnetici diversi rispetto alle
tradizionali terre rare.
Combinando piccole percentuali di terre rare pesanti con i composti è possibile ottenere dei
coefficienti di reversibilità termica (α) molto bassi per limitati range di temperatura.
56
Siccome la magnetizzazione è minore per questo tipo di terre pesanti, un aumento della stabilità
termica corrisponde ad una diminuzione dell’energia magnetica prodotta.
A causa di questo limite conviene applicare sostituzioni sulla composizione a materiali che già di
partenza hanno una più elevata energia magnetica come ad esempio il Sm2Co17.
Con aggiustamenti nella composizione e processi di post-sinterizzazione:
•Sm0,6Er0,4(Co,Fe,Cu,Zr)7,22
α = -0,004%/°C e (BH)max 130 kJ/m3
•Sm0,6Gd0,4(Co,Fe,Cu,Zr) α = -0,005%/°C e (BH)max 140 kJ/m3
( I magneti commerciali hanno comunque valori decisamente inferiori a questi).
La relazione tra la diminuzione dell’energia massima prodotta e la diminuzione di α è non lineare. Le
variazioni della composizione, che nel samario cobalto, sono usate per produrre magneti con alta
stabilità termica per applicazioni particolari, vengono utilizzate anche nei magneti di neodimio ferro
boro.
La temperatura di Curie nel Nd2Fe14B è solo di circa 310 °C a causa della forte dipendenza dei
momenti magnetici del neodimio dalla temperatura. Un aumento di quest’ultima non causa solo
una brusca riduzione della magnetizzazione ma produce anche un rapido declino del campo
magnetico Hci, fino a raggiungere un valore nullo per una temperatura di circa 250°C. Per questo,
senza ricorrere a sostituzione seppur parziali, non è possibile utilizzare questo tipo di magnete al di
sopra dei 100°C. Sostituendo parzialmente il neodimio con il diprosio [Dy], si ha un significante
aumento di Hci e una riduzione di α.
I composti contenenti cobalto, invece, hanno
maggiori valori per quanto riguarda la Tc, ma
presentano una minore coercitività. Una parziale sostituzione in questi casi con del cobalto al posto
del ferro, è utilizzata per aumentare ulteriormente la temperatura di Curie; miglioramenti di questo
parametro e di a, sono inoltre raggiungibili attraverso l’introduzione di diprosio, e cobalto assieme.
Tc in questi composti raggiunge i 500°C e a si riduce fino a -0,07%/°C. I legami tra Dy e Co, però
riducono la magnetizzazione e conseguentemente l’energia massima prodotta (BH)max.
Nel caso di:
•Nd2Fe14B
(BH)max 320 kJ/m3
•(Nd,Dy)-Fe-B
(BH)max 240 kJ/m3
•(Nd,Dy)-(Fe,Co)-B
(BH)max 280 kJ/m3
57
Una piccolo aggiunta di altri materiali è abbastanza comune. Il Gallio (Ga) per esempio, viene
aggiunto per migliorare la capacità di allineamento del composto, migliorando inoltre Hci senza
sacrificare significativamente la magnetizzazione o (BH)max. Una piccola aggiunta di niobium (Nb)
migliora la forma della curva di smagnetizzazione, la quele illustra la temperatura a cui può venire
esposto il magnete durante il suo utilizzo prima che sotto la quale non si ha una grossa ed
irreversibile perdita di flusso.
Fig. 6.5
Il grafico (fig. 6.5)mostra la temperatura a cui possono essere esposti i materiali senza incorrere in
variazioni irreversibili della loro struttura e rispettivamente:
•(Nd,Dy)-Fe-B
160°C
•(Nd,Dy)-(Fe,Co)-B
200°C
•(Nd.Dy)-(Fe,Co,Nb,Ga)-B
260°C
Una piccola aggiunta di alluminio, infine, può incrementare il valore di Hci intorno alla temperatura
di esercizio, purchè non sia questa troppo elevata. Il vanadio invece, viene introdotto per
aumentare la coercitività senza condizionare la magnetizzazione a saturazione.
Ossidazione superficiale
Benché i magneti ceramico ferritici abbiano un alto coefficiente di reversibilità termica, la loro
superficie si presenta stabile e molto resistente a fenomeni di corrosione. I magneti alnico hanno
una bassa α e anch’essi sono ben resistenti a fenomeni corrosivi e ad ossidazione.
L’ossidazione è, comunque, un serio problema in molti dei magneti costituiti da terre rare, per i
quali essa è causa di una forte riduzione delle proprietà del materiale.
58
Se non si provvede ad una protezione delle superfici, l’ossigeno si diffonde nel magnete causando
una variazione della struttura degli strati superficiali. Si è scoperto che questi ultimi sono
abbastanza distinguibili attraverso la misura della profondità d0 che è funzione del tempo e della
temperatura:
d 0 = f T t
Nel caso del SmCo5, ad elevata temperatura il prodotto dell’ossidazione è per lo più Sm3O3.
La conseguenza dell’ossidazione è una diminuzione del valore di Hci nello strato del magnete più
esterno, questo causa una maggiore facilità nello smagnetizzare la zona.
Sfortunatamente l’alta coercitività dei magneti prodotti con terre rare solitamente fa si che essi
vengano prodotti di forme sottili, un magnete di questo tipo con elevata area di superficie rispetto
al suo volume è maggiormente influenzato dalla corrosione. I magneti con scarsa densità, come
tutti quelli di tipo legato, presentano al loro interno delle porosità che permettono alla corrosione di
progredire velocemente, le particelle in questo caso devono essere protette individualmente.
Siccome questo fenomeno è funzione, come già detto, della temperature, pur non essendo questa
dipendenza lineare, vi sarà una temperatura, detta critica, oltre la quale i materiali non protetti
presentano naturali degradazioni delle loro prestazioni magnetiche. Questa temperatura è intorno
ai 150°C per SmCo5 e ai 250°C per il Sm2Co17.
Un’aggiunta di cobalto nel composto riduce gli effetti dell’ossidazione; contrariamente a quanto
avviene nei magneti di neodimio-ferro-boro, in cui un aggiunta di questo materiale se non in
piccole quantità causa una ossidazione superficiale ancora più problematica. Al fine di predisporre
un adeguato sistema di protezione di questi ultimi, si deve conoscere esattamente la composizione
della mistura da cui sono prodotti.
Ad elevate temperature il prodotto della corrosione nel Nd-Fe-B è per lo più Nd2O3, invece, un’alta
umidità causa una reazione del composto con l’idrogeno presente nell’atmosfera, che viene
assorbita dagli strati superficiali, causando la loro frantumazione.
Questi magneti sono attualmente costruiti con del neodimio arricchito come ad esempio Nd 15Fe77B8
nel quale sono presenti grani interni fortemente magnetici del composto base, ai cui bordi è
presente il neodimio arricchito, che provvedono a bloccare le pareti di dominio e sono fonte della
coercitività.
Precedentemente si è parlato dell’aggiunta del cobalto per aumentare la temperatura di Curie e per
ridurre l’ossidazione superficiale. Se e solo se introdotto in piccolissime concentrazioni, questo
materiale permette questo anche nei magneti di neodimio-ferro-boro perché viene principalmente
segregato nei bordi dei grani, dove forma un composto intermetallico con la fase del neodimio
59
arricchito; dall’ossidazione del Co e del Nd deriva l’impedimento alla formazione del Nd 2O3 causa
della corrosione . Anche il vanadio agendo in maniera simile permette una forma di isolamento da
questo fenomeno.
Vi sono tre principali metodi di protezione dalla corrosione:
•Rivestimento di nichel di 10-15 micrometri di spessore
•Rivestimento di resina epossidica di 20-30 micrometri di spessore
•Rivestimento di alluminio di 10 micrometri di spessore.
60
CAPITOLO 6
MAGNETIZZAZIONE E TEST
Introduzione
Per quanto riguarda la magnetizzazione iniziale dei materiali, l’obbiettivo è quello di applicare loro
una sufficiente energia al fine di allineare i loro vettori di magnetizzazione verso un’unica direzione,
per la quale il materiale risulta saturo a Msat. Le prestazioni ottime sono raggiunte lungo questo asse
preferenziale, ma le caratteristiche che qualificano le proprietà del materiale devono essere
misurate all’esterno del magnete. Il parametro interno M, non può essere infatti misurato
direttamente e sebbene le curve individuano e descrivono le varie caratteristiche e proprietà; il
punto iniziale di partenza è il diagramma B-H.
Procedimenti di magnetizzazione
In generale si ipotizza che per magnetizzare completamente a saturazione un magnete permanente,
vi si deve applicare un campo esterno che ha come intensità 3-5 volte il valore della coercitività Hci.
I produttori provvedono alla minima magnetizzazione richiesta dai materiali:
Ceramic 8 Hci=250 kA/m campo applicato 800 kA/m
Alnico 5
Hci=50 kA/m
campo applicato240 kA/m
La diversità dei valori, deriva dal fatto che i magneti ceramico ferritici basano il loro magnetismo
permanente sull’anisotropia magnetocristallina, mentre il meccanismo dominante nell’alnico è
l’anisotropia di forma.
In maniera simile a quella appena descritta, anche molti dei magneti ad alta energia prodotti da
terre rare richiedono un campo maggiore o uguale a tre volte il valore della coercitività per la loro
magnetizzazione, e visti i loro alti valori di coercitività il campo che dovrebbe essere applicato risulta
di notevoli intensità. Ad esempio, il magnete Nd-Fe-B, ha una coercitività intrinseca di circa 1000
kA/m, ma quando esso viene modificato in (Nd,Dy)-Fe-B, al fine di migliorare il coefficiente di
temperatura, Hci aumenta fino a raggiungere circa il valore di 1700 kA/m, il materiale di partenza,
cos’, diventa ancora più difficilmente magnetizzabile. La sostituzione del cobalto, che provvede ad
un aumento della temperatura di Curie, interviene anche sul valore del Hci, riportandola circa al
valore di 1000 kA/m, perciò il (Nd,Dy)-(Fe,Co)-B, risulta più facilmente magnetizzabile del
precedente.
61
In generale in tutti i tipi di magneti vi sono sostanziali differenze per quanto riguarda la loro
magnetizzazione, pur essendo lo stesso materiale il componente, come ad esempio i magneti di
samario-cobalto o quelli di neodimio-ferro-boro. Queste differenze sono in funzione della
lavorazione con la quale sono ottenuti, o della loro struttura interna.
Nella grande maggioranza dei casi comunque, i magneti vengono forniti non magnetizzati, questo
per le seguenti ragioni:
•Il magnete attirerebbe su di se la polvere magnetica che poi tende a spostarsi nel
traferro
•Il montaggio di sistemi abbastanza precisi diviene pressoché impossibile per la notevole
forza di attrazione che si esercita tra le espansioni polari
•I magneti che presentano un ginocchio nella curva di smagnetizzazione (tipicamente
Alnico) si smagnetizzano parzialmente all’atto dell’estrazione dal magnetizzatore, in
maniera più o meno accentuata in dipendenza delle dimensioni geometriche del
magnete stesso.
Per eseguire la magnetizzazione delle calamite montate si procede nel seguente modo:
Il complesso viene disposto in un magnetizzatore in modo che le linee del campo da esso generato
coincidano con la direzione di magnetizzazione desiderata (che è la direzione di magnetizzazione
per le calamite anisotrope) e che l’intensità del campo sia almeno tre volte la forza coercitiva del
materiale magnetico, come già detto. Durante questa operazione sia il magnete , sia il ferro dolce
che costituisce il circuito di richiusura del flusso magnetico sono magnetizzati a saturazione nella
direzione del campo applicato.
Al cessare dell’azione magnetizzante esterna il ferro dolce perde quasi totalmente la sua
magnetizzazione, mentre lo stato di magnetizzazione della calamita ripercorre la curva di isteresi
fino al punto di lavoro; lo stato che così si raggiunge è tale per cui il campo creato dalla calamita è in
grado di magnetizzare il ferro del circuito magnetico in modo da richiudere su se stesso le linee di
flusso secondo la legge naturale del percorso a minore riluttanza magnetica.
62
Le attrezzature utilizzate per la magnetizzazione dei materiali sono le seguenti:
Fig. 1.6
•ELETTROMAGNETI: essi sono convenienti per magnetizzare calamite comuni come barrette, cilindri
e complessi montati. Le espansioni polari sono regolabili; con esse e in funzione della corrente che
percorre la bobina varia la forza magnetizzante. Nell’eseguire la magnetizzazione con
elettromagneti occorre porre attenzione a varie condizioni:
Il prodotto NI ( N, numero di spire e I intensità corrente) deve essere tale da
garantire ai capi della calamita la forza magnetica necessaria alla saturazione, vale
a dire bisogna tenere conto delle cadute di tensione magnetica dovute ai traferri e
ai cortocircuiti magnetici dei sistemi
Il campo nel traferro deve essere uniforme, il che significa che la sezione del
magnete deve essere inferiore a quella delle espansioni polari
Fig. 2.6
63
•SOLENOIDI: Un solenoide abbastanza lungo è molto utile per magnetizzare barre lunghe. Al centro di un
solenoide lungo e stretto, il campo H viene calcolato con la formula:
H(Oe)=1,26×A spire/cm
1 Oe=A/m
Fig. 3.6
•MAGNETI PERMANENTI:
Per la magnetizzazione di piccole calamite, per le quali spesso non è
necessaria una uniformità di campo, la bobina di un elettromagnete può essere sostituita da un
magnete permanente abbastanza grosso. Questo sistema però presenta lo svantaggio di richiedere
uno sforzo notevole nel togliere la calamita dal traferro e nello stesso tempo di dover far passare il
magnete attraverso linee di flusso non uniformi
•MAGNETIZZATORI AD IMPULSI:Lo sviluppo di materiali magnetici ad alta forza coercitiva e con elevato
prodotto di energia BH ha condotto alla creazione di calamite che hanno le forme più diverse e
quindi anche differenti tipi di magnetizzazione . Per questo motivo la magnetizzazione avviene
facendo agire il campo magnetico generato da un conduttore percorso da corrente di forma
opportuna direttamente sulla calamita.
64
Impulso magnetizzante
E’vantaggioso ridurre il numero delle spire che formano la bobina ed aumentare il più possibile la
corrente per ridurre al minimo l’autoinduttanza ed evitare fenomeno oscillatori che
provocherebbero la smagnetizzazione della calamita. La magnetizzazione in se stessa non dipende
dalla durata dell’impulso magnetizzante, però, soprattutto nel caso delle calamite metalliche con
bassissima resistenza elettrica specifica, le correnti di Foucault, correnti parassite indotte in masse
metalliche conduttrici che si trovano immerse in un campo magnetico variabile o che, muovendosi,
attraversano un campo magnetico costante o variabile generate dal flusso magnetico, generano un
campo magnetico contrario a quello applicato.
Fig. 4.6
La figura mostra l’effetto delle correnti indotte durante la magnetizzazione;
[1] Per impulsi brevi all’aumentare della corrente il flusso contrario delle correnti indotte può
diminuire il flusso magnetizzante
[2] Impulso di corrente lungo a sufficienza perché le correnti indotte decadano prima dell’impulso
stesso
65
Il principio di magnetizzazione è indicato nella figura successiva
Fig. 5.6
1.Il condensatore C è caricato alla tensione V in un tempo determinato dalla resistenza R0.
2.Il condensatore viene scaricato sulla bobina L, se R è maggiore di 2√(L/C), l’impulso è unidirezionale
senza oscillazioni, altrimenti deve essere montato in parallelo alla bobina il cosidetto “diodo di riciclo”
per smorzare la semionda negativa. Quest’ultima caratteristica permette di utilizzare il
magnetizzatore anche come smagnetizzatore disinserendo il diodo di ricircolo in un circuito
oscillante.
I magnetizzatori ad impulso, sono caratterizzati dall’energia
1 2
C V perché la corrente massima
2
della scarica in condizioni di aperiodicità è ad essa proporzionale. Il metodo di magnetizzazione
utilizzato è quello di utilizzare più poli, per capire la convenienza di questo metodo, si prende ad
esempio un magnete cilindrico di lunghezza l e diametro d, magnetizzato lungo l’asse: se esso è
molto lungo, l/d ∞, le linee di campo si richiudono all’esterno e sulle teste è Bs=Br; se invece la
calamita si riduce ad un dischetto l/d≈0 tutte le linee si richiudono attraverso il magnete e non si
crea campo esterno Bs=0. E’ possibile stimare che per un magnete di spessore uguale al diametro, il
campo si richiuda metà all’interno e metà all’esterno con Bs=1/2Br. La forza di attrazione aumenta
con l’aumentare dello spessore, ma oltre un certo livello non risulta più essere ne pratico ne
conveniente.
66
Con magneti di ultima generazione, ci si può ricondurre alle condizioni di l/d favorevole mediante la
magnetizzazione a più poli.
Si possono generalizzare le condizioni in questo modo:
•Per basso spessore della calamita i poli devono essere più fitti
•L’azione a distanza aumenta con la larghezza dei poli e lo spessore della calamita
Smagnetizzazione
L’uso dei magneti permanenti può occasionalmente richiedere la loro smagnetizzazione, mentre la
loro produzione e le fasi successive ad essa la richiedono frequentemente, al fine di facilitare gli
spostamenti e i trasporti. Numerosi metodi possono essere utilizzati per la smagnetizzazione, ma la
scelta dipende principalmente dalla coercitività e dalle dimensioni del magnete in oggetto; è infatti
sufficiente applicare un campo di intensità circa uguale a -Hci. Nella pratica però è davvero molto
difficile riuscire ad applicare un campo con esatta grandezza, tale da riportare il magnete a B=0. Il
modo più comune, allora, per raggiungere la smagnetizzazione è di applicare un campo alternato,
inizialmente di misura sufficiente a invertire il flusso del magnete( non è necessario che raggiunga la
saturazione nella direzione opposta). La misura di questo campo alternato va via via a ridursi, fino a
raggiungere il valore nullo, portando il flusso magnetico a ridursi con esso.
La smagnetizzazione delle terre rare può essere fatta con l’ausilio del calore; questo processo è
possibile a causa del fatto che la coercitività diminuisce con l’aumento della temperatura a cui viene
sottoposto il magnete. Si deve però avere cura di prevenire variazioni a livello metallurgico, come ad
esempio l’ossidazione; il campo per questo viene applicato a temperature di soli 200°C circa.
I magneti ceramico ferritici, comunque, possono essere semplicemente smagnetizzati termicamente
con il superamento della temperatura di Curie a 450 °C, sopra la quale, la magnetizzazione
spontanea, come già precedentemente detto viene annullata, non è richiesta, infatti, l’applicazione
di alcun campo esterno in questo caso. E’ comunque importante non superare i 1000°C perché
oltre questa temperatura si assiste a variazioni permanenti della struttura della ferrite.
La smagnetizzazione termica, invece, non possono avere alcun effetto sui magneti Alnico poiché le
loro variazioni permanenti si hanno attorno ai 500°C molto al di sotto della loro temperatura di
Curie, per questo non è possibile ricorrere a questo metodo.
67
Misure delle grandezze fondamentali
Dalle misure di B e H si possono dedurre, come visto in precedenza tutte le caratteristiche
(Bsat,Hsat,Br, m, BH, ecc) che individuano le proprietà del materiale magnetico, si vanno ora a
descrivere i sistemi di misura delle due grandezze fondamentali.
Tre sono i metodi impiegati principalmente per la misura dell’induzione B e della forza magnetica:
1.Misura della coppia che il campo magnetico esercita su di un piccolo magnete, o su una bobina
percorsa da corrente elettrica;
2.Attraverso l’uso di un sensore di Hall
3.Misura della quantità di corrente indotta in una bobina dalla variazione del campo magnetico
Le apparecchiature che si basano sui primi due metodi sono chiamate genericamente gaussmetri,
perché danno la misura diretta del campo di Gauss; quelle invece che si basano sul terzo metodo
vengono dette flussimetri poiché danno il valore di B tramite la misura del flusso che attraversa
un’area nota.
68
Gaussmetro
Fig. 6.6
La figura rappresenta la sezione di un gaussmetro a lettura diretta. Una sottile calamita
magnetizzata è fissata all’estremità di un perno magnetico, una molla all’altra estremità che la
coppia di richiamo che controbilancia la coppia che il campo esterno genera sul magnete tendendo
ad allinearlo con le linee di forza. La misura avviene ruotando lo strumento fino a che l’indice segna
il massimo valore, cioè il senso di magnetizzazione della calamita è perpendicolare alle linee di
flusso. Questo strumento indica la direzione di B che è perpendicolare all’indice quando esso è
portato nella posizione di massimo valore; o parallelo all’indice se lo strumento viene portato a 0.
Il magnete deve avere un’altissima forza coercitiva intrinseca per non essere smagnetizzato durante
la misura ed è costruito in lega di Slimanal o platino-cobalto. Lo stru mento è ben indicato per
studiare i flussi dispersi ed è facilmente reperibile nelle diverse sensibilità che vanno da un minimo
di 50 Gs ad un massimo di 10000 Gs a fondo scala. La precisione è ±5% del valore massimo
misurabile.
69
Sonda di Hall
Fig. 7.6
Un piccolo monocristallo, in genere arseniuro di indio, collegato con connessioni elettriche mostrate
in figura, costituisce l’elemento sensibile della sonda; al passaggio di una debole corrente i nella
direzione y, si osserva tra i punti A e B in direzione di x una tensione che è proporzionale al campo H
in direzione z secondo la relazione:
V=
RHi
d
Con R si indica la costante di Hall, caratteristica del materiale di cui è costruito l’elemento sensibile.
Data le semplicità d’uso della sonda di Hall e la notevole precisione ottenibile (±1-2%) il suo impiego
ha ormai soppiantato tutti gli altri.
Spirale di Lenard
Lo strumento, ormai in gran parte abbandonato, serve a misurare l'intensità di un campo magnetico
utilizzando la variazione della resistenza elettrica del bismuto in presenza del campo magnetico
stesso. Si tratta di un filo sottile di bismuto elettrolitico avvolto a forma di spirale bifilare piana. Le
estremità del filo di bismuto vengono collegate ad uno strumento per misura di resistenze, per
esempio un ponte di Wheatstone. La spirale piana, protetta da entrambe le parti da due piccoli
dischi di mica, viene posta perpendicolarmente alle linee di forza del campo magnetico.
70
Flussometri
Misure molto precise delle caratteristiche dei magneti si ottengono con i flussometri.
La quantità di carica elettrica che percorre una bobina che viene spostata da un punto in cui
l'induzione è B a uno in cui è Bo è proporzionale alla differenza B-Bo; per determinare il flusso F che
attraversa una determinata area, si costruisce una bobina con le dimensioni adeguate al traferro in
cui si deve eseguire la misura.
La misura si effettua collegando la bobina a un galvanometro balistico ed estraendola rapidamente
dal circuito magnetico, o riducendo il campo ad un valore noto. In entrambi i casi la deflessione del
galvanometro è proporzionale alla variazione del numero di linee di flusso che attraversano la
bobina:
D=k φ N
essendo :
D - la deflessione del Galvanometro.
Φ - la variazione di flusso concatenato alla bobina;
N - il numero di spire della bobina;
k - la costante di taratura;
poiché Φ = BA (A è l'area della bobina), si ha B = k D/NA.
Siccome il calcolo di NA presenta notevoli difficoltà, è conveniente tarare una bobina nuova con una
di NA conosciuto.
Si realizza il circuito:
Fig. 8.6
71
A questo punto, si estraggono contemporaneamente le due bobine da un campo uniforme; si regola
allora Rx ripetendo la misura finché il galvanometro G non segna più deflessione, si ricava quindi la
relazione:
N A 1 Rt R1
=
N A2 R2 R x
Un’applicazione importante è la misura del campo del traferro di un altoparlante. Si evidenzia in
questo caso la presenza di una bobina differenziale, cioè una bobina nella quale due serie di spire
sono avvolte in senso contrario, in modo che l’estrazione rapida della bobina non tenga conto dei
flussi dispersi; infatti, la bobina 1 misura solo il flusso disperso, invece, la bobina 2 misura il flusso
del traferro più quello disperso e quindi l’estrazione delle due bobine contemporaneamente da la
misura della differenza dei flussi e in definitiva quella del flusso del traferro.
Tracciatori automatici di curva
Il sistema più semplice per la misura della forza magnetica, prevede che due bobine identiche siano
inglobate in una espansione polare. Per la misura il magnete viene posto sopra di una delle due
bobine [B], tenendo l'altra come riferimento per poter apprezzare la variazione delle grandezze in
gioco ed il circuito magnetico viene chiuso; una sonda Hall come quella precedentemente descritta,
e quindi in grado di percepire una tensione proporzionale al campo H, viene collocata abbastanza
vicino al magnete. Per tracciare la curva B-H, il segnale prelevato dalla bobina B (tra i punti 0 e 1) al
variare del campo H in funzione della corrente che percorre le bobine dell'elettromagnete, viene
inviato all'asse y di un plotter, mentre il segnale letto dalla sonda va all'asse x. Sottraendo dal
segnale della bobina B quello generato dalla bobina H (tra i punti 0 e 2) si possono tracciare le curve
M-H.
Fig. 9.6
72
CAPITOLO 7
APPLICAZIONI
Introduzione
I magneti permanenti sono stati utilizzati largamente nel campo degli apparati elettrici per molti
anni. Il sostanziale miglioramento nel corso degli anni delle proprietà e caratteristiche dei materiali
che ha accompagnato l’evoluzione dei magneti prodotti da terre rare ha focalizzato l’interesse sui
dispositivi elettromeccanici ed elettronici, nei quali questi materiali possono essere applicati
vantaggiosamente.
La produzione interessa i dispositivi fabbricati in quantità estremamente ampie con costi ridotti,
questo, è la causa dell’utilizzo nella maggior parte di magneti ceramico ferritici. Nel caso di utilizzo
di terre rare ad alte prestazioni, o nel caso di necessità di elevate prestazioni, i costi di produzione,
crescono notevolmente.
Le più importanti applicazioni per i magneti permanenti è rappresentata dai motori elettrici a
corrente continua e dai motori brushless. I magneti ceramico ferritici furono a lungo utilizzati in
queste macchine per fornire un campo statico generato dai loro statori, ma il più recente utilizzo di
terre rare ad alta energia, hanno permesso particolari vantaggi promuovendo evoluzioni
elettroniche come i motori a corrente continua brushless. L’alta energia delle terre rare è spesso
utilizzata anche per produrre una maggiore densità di flusso nei motori a corrente continua
tradizionali, che corrisponde ad un miglioramento della coppia motrice. Inoltre, la ricerca di magneti
ad alta coercitività migliora la resistenza dei materiali alla smagnetizzazione dell’armatura esterna
del motore.
Uno dei maggiori mercati per i motori a corrente continua a magneti permanenti è rappresentato
da quello automobilistico, dove i costi solitamente hanno la priorità sulle prestazioni, e perciò
l’utilizzo dei magneti ceramico ferritici, come già detto i più economici, rappresenta l’alternativa più
utilizzata. Le moderne automobili, contengono sempre maggiori dispositivi controllati
elettromagneticamente e vari tipi di magneti Nd2Fe14B vengono utilizzati e ulteriormente studiati
per migliorare i dispositivi per gli impianti di ventilazione, raffreddamento, accensione ed altre
numerose applicazioni.
Per quanto riguarda i motori brushless, in cui lo sviluppo è orientato sempre più verso la maggiore
miniaturizzazione e l’aumento delle prestazioni, i materiali più utilizzati sono soprattutto i magneti
di samario–cobalto e neodimio –ferro–boro in modo da rendere stabile il loro utilizzo, l’applicazione
più nota è l’utilizzo negli hard–disk dei computer. Il maggiore prezzo dei magneti prodotti da terre
rare rispetto a quelli dei magneti convenzionali sono giustificati dai numerosi benefici come ad
esempio miglioramenti nelle loro performance, aspetto e maggiore facilità di montaggio.
73
Un’altra grande categoria di dispositivi utilizzanti i magneti permanenti sono i motori passo passo
(stepper motor), particolarmente adatti al controllo digitale, poiché la loro rotazione avviene a passi
graduali. Un altro campo sono le macchine sincrone, nelle quali i magneti e ilo loro campo ruotano
in sincronia con uno statore multipolare.
Vi è poi un’ulteriore grande categoria di dispositivi chiamata genericamente attuatori, che possono
o meno impiegare per il loro funzionamento i magneti; convertendo l’energia elettrica in energia
meccanica, essi sono in grado di fornire una coppia in un sistema rotante, o una forza lineare se
necessario. Gli attuatori rotativi sono molte volte simili, se non identici, ai vari tipi di motori elettrici
precedentemente menzionati, con la differenza, però, di avere un angolo d’azione molto ridotto. Gli
attuatori lineari, vengono
spesso utilizzati
nei motori elettrici convenzionali, in cui il loro
movimento rotatorio, viene convertito in moto lineare attraverso opportune riduzioni.
Gli hard-disk per i computer, come già accennato, rappresentano un importante mercato per i
magneti ottenuti da terre rare. Un attuatore a bobina mobile è utilizzata per la posizionare la testina
di lettura / scrittura in un driver del disco, i requisiti sempre maggiormente richiesti sono sia la
miniaturizzazione che la necessità di miglioramento delle prestazioni; questo ha favorito un utilizzo
di magneti di Nd2Fe14B. Considerando che il mandrino del motore gira ad una velocità costante, la
testina dell’attuatore deve sviluppare una forza elevata per ridurre al minimo il tempo necessario
per accedere alle informazioni del disco rigido. Il magnete attuatore è quindi molto più grande del
magnete motore del mandrino, ed è la combinazione della sua densità di energia e del costo
unitario che ha portato i magneti di Nd2Fe14B a dominare questa applicazione.
Gli attuatori mobili a spira di questo tipo sono frequentemente conosciuti come voice coil actuators,
a causa della loro somiglianza con il sistema di altoparlanti audio. Gli altoparlanti utilizzano
tradizionalmente magneti Alnico o ceramici ferritici, ultimamente però grazie alle caratteristiche di
riduzione di peso e delle dimensioni, vi è uno sviluppo abbastanza considerevole dei magneti di
terre rare.
Un utilizzo specializzato e molto importante dei materiali magnetici, riguarda inoltre i sensori, i quali
molte volte richiedono dimensioni davvero ridotte. I sensori magnetici di posizione e quelli di
velocità sono utilizzati in molti dei sistemi di controllo delle automobili. Un esempio è la misura del
della posizione dell’albero motore ottenuta quasi esclusivamente per mezzo di un sensore
magnetico posto nei pressi del volano. Siccome i magneti di terre rare permettono notevole energia
mantenendo delle dimensioni accettabili per l’utilizzo nel campo dei sensori ed inoltre migliorano la
sensibilità del dispositivo, in questi anni il loro sviluppo e studio è stato incentivato.
74
Motore a corrente continua
L’applicazione più significativa per molti tipi di magneti permanenti è nelle macchine elettriche
rotanti a corrente continua. Un macchina a corrente continua può anche impiegare per il suo
funzionamento il campo a corrente continua in serie o in parallelo alla bobina che forma l’armatura
del motore, ma un magnete permanente offre una più efficiente e meno complessa alternativa per
produrre il campo magnetico. Il più comune tipo di macchine a corrente continua che utilizza i
magneti permanenti è il motore elettrico, nel quale l’energia elettrica è convertita in coppia
meccanica e velocità.
La corrente elettrica passa in un avvolgimento di spire che si trova nel rotore. Questo avvolgimento,
composto da fili da rame un campo elettromagnetico al passaggio di corrente. Nascono forze di
attrazione e repulsione con i magneti permanenti fissi. Il campo elettromagnetico generato è
immerso in un altro campo magnetico creato dallo statore, il quale è caratterizzato dalla presenza di
due o più coppie polari (calamite, elettrocalamite, ecc.).
Quando la corrente scorre negli
avvolgimenti, si genera un campo magnetico intorno al rotore. La parte sinistra del rotore è respinta
dal magnete di sinistra ed attirata da quello di destra. Analogamente fa la parte in basso a destra. La
coppia genera la rotazione.
Fig. 1.7
Il rotore per induzione elettromagnetica inizia perciò a girare, in quanto il campo magnetico del
rotore tende ad allinearsi a quello dello statore analogamente a quanto avviene per l'ago della
bussola che si allinea col campo magnetico terrestre. Quando le armature si allineano
orizzontalmente, il commutatore inverte la direzione di corrente attraverso gli avvolgimenti,
modificando anche il campo magnetico. Il processo ritorna quindi allo stato di partenza e il ciclo si
ripete.
75
Infatti, durante la rotazione il sistema costituito dalle spazzole e dal collettore commuta
l'alimentazione elettrica degli avvolgimenti del rotore in modo che il campo magnetico dello statore
e quello del rotore non raggiungano mai l'allineamento perfetto, in tal modo si ottiene la continuità
della rotazione.
Durante la trasformazione, una modesta parte dell'energia viene dispersa per l'effetto Joule. Dato il
principio di funzionamento, un motore elettrico fa sempre muovere l'albero motore di moto
rotatorio.
Al contrario, se viene fornita energia meccanica al rotore, la macchina funziona poi come un
generatore di corrente elettrica, da questo si può intuire la sua capacità di agire anche da freno,
talvolta usato anche per il recupero dell'energia nei mezzi ibridi; nel caso più semplice collegando
alle spazzole un resistore, l'energia meccanica trasmessa all'albero si dissipa in calore su questo
resistore.
La velocità di rotazione del rotore dipende da:
•Tensione applicata.
•Corrente assorbita dal rotore.
•Carico applicato.
La coppia generata è proporzionale alla corrente ed il controllo più semplice agisce sulla tensione
d'alimentazione, mentre nei sistemi più complessi si usa un controllo automatico in retroazione che
legge le variabili per generare la tensione da applicare al motore. La coppia è inversamente
proporzionale al numero di giri; ciò è molto utile per la trazione in quanto il massimo spunto si ha
con veicolo fermo, inoltre il sistema tende da solo alla autoregolazione sulla velocità.
Le caratteristiche di interesse dei magneti per la produzione di motori possono essere evidenziate
prendendo in considerazione la legge di Faraday dell’induzione elettromagnetica utilizzata per
derivare la f.e.m. indotta da un cambiamento del flusso in una spira semplice
e=−N
dΦ
dt
In questo caso, un motore elettrico utilizzerà un magnete con struttura a più poli, p sta ad indicare
proprio il loro numero (pari), ognuno di esso produce un flusso di grandezza Φ.
76
L’avvolgimento dell’armatura comprenderà un totale di N giri, ma questi sono generalmente divisi
equamente tra una serie di percorsi paralleli a tra i suoi terminali. Se la velocità angolare del rotore
è Ω rad/s, allora la legge di Faraday applicata a questo tipo di macchina, può essere derivata come:
e=
pΦ N
Ω
πa
Se Φ è circa costante, come avviene in molti dispositivi magnetici allora la f.e.m. indotta è
direttamente proporzionale alla velocità. E’ allora comune definire una forza elettromotrice
costante della macchina come:
K e=
pΦ N
πa
Per un motore a corrente continua operante nelle condizioni statiche, ad un voltaggio V e ad una
corrente i, l’avvolgimento appare come puramente resistivo con resistenza R e l’equazione elettrica
cercata è:
V =ei R
Nei generatori invece il voltaggio terminale è il risultato della f.e.m. generata e l’equazione cambia
in:
V =e−i R
In entrambi i casi, nelle condizioni operative dinamiche, sarà necessario includere nel calcolo
l’induttanza dell’avvolgimento attraverso un termine addizionale
L
di
dt
Considerando le equazioni precedenti, si nota che la velocità di un motore c.c. a magneti
permanenti varierà con la corrente se la fornitura di voltaggio è fissata:
K e Ω=V −i R
Da un’adatta scelta dei parametri, il regime di velocità può essere mantenuto per ogni variazione di
corrente. La coppia fornita dal motore è direttamente proporzionale alla corrente:
T = Kt i
77
In questo caso è molto comune utilizzare la costante di coppia Kt al posto di Ke, perché non vengono
considerate per semplicità le perdite dovute ad attriti.
Fig.2.7
Il limite principale di questo tipo di motore è nella necessità del commutatore a spazzole:
•Le spazzole sono in grafite , mentre nei piccoli servomotori e nei tipi utilizzati nei lettori CD/DVD
o
registratori
a
cassette
sono
in
lega
metallica
bianca.
La differenza è nella frequenza della loro sostituzione, infatti nelle macchine utensili come
smerigliatrici o trapani, si utilizzano spazzole in grafite, perché è molto semplice e veloce
sostituirle, le spazzole in metallo, sono usate su apparecchi dove risulta scomodo o non
conveniente cambiarle, come nei motori d'avviamento dei mezzi di trasporto.
•Le spazzole pongono un limite alla massima velocità di rotazione: maggiore è la velocità e più
forte è la pressione che bisogna esercitare su di esse per mantenere un buon contatto,
comunque i motori universali usati negli aspirapolvere e negli elettroutensili portatili (trapani,
mole, ect.) possono raggiungere i 3.500-4.500 giri al minuto.
•Tra spazzole e collettore, nei momenti di commutazione, si hanno transitori di apertura degli
avvolgimenti induttivi e quindi scintillio, attenuabile con l'anticipazione della commutazione dei
vari avvolgimenti rotorici (le spazzole devono essere ruotate assialmente in anticipo rispetto alla
rotazione dell'indotto), soluzione applicabile per motori che devono ruotare sempre in una sola
direzione.
•Queste scintille comportano disturbi elettrici sia irradiati nell'ambiente circostante che trasmessi
al generatore di tensione (che alimenta il motore); questi disturbi, in determinati settori di
impiego, possono causare problemi di compatibilità elettromagnetica; è possibile attenuarli
tramite dei filtri.
La presenza di avvolgimenti elettrici sul rotore ha anche due aspetti negativi:
78
•Se il motore è di grossa potenza si hanno dei problemi di smaltimento del calore
(gli
avvolgimentii si riscaldano per effetto Joule), il campo magnetico alternato nel nucleo del rotore
genera altre perdite, causate da isteresi magnetica e correnti parassite nel nucleo stesso, e
quindi altro calore.
•Gli avvolgimenti appesantiscono il rotore (aumenta il momento di inerzia): se il motore deve
rispondere con rapidità e precisione (come avviene nelle automazioni industriali e nella robotica)
il controllo diventa più complesso; per piccole potenze (da 1 a 200W) e servocontrolli a volte si
usano particolari tipi di motori con rotore con avvolgimenti a forma di bicchiere e privo del
nucleo di ferro, detti "ironless": hanno bassa inerzia e rendimento elettrico più elevato dei loro
corrispondenti con rotore avvolto su nucleo di ferro.
Le prestazioni ottenute dai motori elettrici, aumentano notevolmente se in esso vengono utilizzate
magneti ottenuti da terre rare, capaci di produrre lo stesso campo con minori dimensioni del
magnete stesso, dallo sviluppo di questi motori si è arrivati alla produzione di motori brushless, cioè
senza spazzole.
Nelle macchine a corrente continua tradizionali, la direzione della corrente sull’armatura è regolata
meccanicamente attraverso spazzole a contatto col commutatore, mentre nei motori brushless, il
controllo è fatto elettronicamente. Quest’ultimo tipo di regolazione generalmente avviene quando
l’avvolgimento del motore fisso, nelle macchine commutate meccanicamente invece, la struttura
del magnete è generalmente parte del rotore, il quale ruota all’interno dello statore composto dai
magneti permanenti.
[a] motore a magnete permanente convenzionale
[b] motore brushless
Fig. 3.7
79
Motori sincroni
I motori sincroni a magnete permanente, motori Rowan o brushless sinusoidali, sono un tipo di
motori elettrici in corrente alternata in cui il periodo di rotazione è sincronizzato con la frequenza
della tensione di alimentazione, solitamente trifase. Essi sono impiegati sempre più diffusamente
in ambito industriale, specialmente nei servo azionamenti di piccola e media potenza e sono
essenzialmente destinati ad azionamenti ad elevate prestazioni, in cui le particolari specifiche
giustifichino il loro costo che è solitamente elevato per la presenza di magneti permanenti di pregio
nell'elemento mobile (rotore). Lo statore ed il rotore sono entrambi a forma di corona cilindrica di
materiale ferromagnetico laminato e separati da un traferro in aria. Sul rotore trovano posto i
magneti permanenti; dato che essi presentano generalmente una permeabilità magnetica
differenziale molto simile a quella dell'aria, a seconda della loro disposizione e della forma del
rotore si possono ottenere strutture di rotore isotrope o anisotrope dal punto di vista magnetico,
che caratterizzano rispettivamente i motori brushless SPM (surface permanent magnet) e IPM
(interior permanent magnet).
Fig. 4.7
La frequenza di rotazione dipende dalla frequenza di alimentazione e dal numero di terne di
espansioni polari presenti nel motore. Il numero di giri al minuto del motore sincrono è dato da
n=
60 f
p
Dove n è il numero di giri/minuto, f è la frequenza della rete elettrica di alimentazione e p è il
numero di "paia di poli", ovvero il numero di bobine che costituiscono ogni avvolgimento o coppia polare.
La velocità dipende sia dal numero delle coppie polari che dalla alimentazione. Le tre fasi
dell’avvolgimento dello statore,sono reciprocamente sfasate nello spazio di 2π/3, e ciascuna fa capo
ad una coppia di morsetti attraverso i quali è possibile fornire loro alimentazione da una sorgente
trifase esterna.
80
Il flusso prodotto dall’avvolgimento dell’armatura del motore è in quadratura con il flusso principale
derivante dal magnete permanente; questa fase a 90° viene mantenuta attraverso commutatori
meccanici ed elettronici dell’avvolgimento. L’avvolgimento dello statore multifase produce un
campo, il rotore, costituito dal magnete permanente, senza la necessità di alcuna commutazione
ruota in sincronia con esso producendo una coppia massima quando le due componenti del flusso
sono in quadratura. L’equazione caratteristica della potenza delle macchine sincrone è:
P=
Ve
si nδ
X
L’induttanza di tutte le fasi dell’avvolgimento è compresa nella sua reattanza X, δ rappresenta
l’angolo di torsione tra i vettori dei flussi, il quale conferma la potenza massima se δ=90°.
Nella configurazione brushless, l’armatura è solitamente nella struttura dello statore, e il rotore è
composto dai magneti permanenti. Questa tipologia invertita è molto comune in questi motori,
permettendo anche una maggiore e più facile accessibilità ai terminali dell’avvolgimento essendo
fissi e un più efficiente smaltimento di calore generato dall’avvolgimento stesso. Essi permettono
inoltre di ridurre ulteriormente le dimensioni del rotore (e quindi le sue inerzie) usando materiali
magnetici più efficienti come le leghe di samario cobalto o meglio, Neodimio/Ferro/Boro. L’alta
energia delle terre rare può essere utilizzata quindi per migliorare le prestazioni dei motori a
corrente continua in vari modi, per esempio è possibile la costruzione di dispositivi con inerzia
ridotta.
I motori brushless, perciò, non hanno bisogno di contatti elettrici striscianti sull’albero motore per
funzionare; il fatto che la commutazione della corrente avviene elettronicamente, permette la
riduzione della resistenza meccanica, elimina la possibilità che si formino scintille al crescere della
velocità di rotazione, e riduce notevolmente la necessità di manutenzione periodica.
Il primo grosso vantaggio riguarda la vita attesa del motore, dato che le spazzole sono il "punto
debole" di un motore in corrente continua. L'assenza di spazzole elimina anche la principale fonte di
rumore elettromagnetico presente negli altri motori in continua. L'ingombro è limitato rispetto alla
potenza che possono erogare. In termini di efficienza, i motori brushless sviluppano molto meno
calore di un equivalente motore in corrente alternata. Gli avvolgimenti sullo statore inoltre
dissipano facilmente il calore generato e permettono di costruire motori "lisci", senza alettature
esterne. L'assenza di scintille è fondamentale quando il motore opera in ambienti saturi di composti
chimici volatili come i carburanti.
In questo tipo di motori i magneti permanenti sono posizionati sul rotore e sono realizzati con
speciali materiali che permettono di avere un'inerzia rotorica molto bassa, cosa che permette di
avere un controllo estremamente preciso sia in velocità che in accelerazione.
81
Queste caratteristiche li rendono adatti all'utilizzo nei lettori CD e DVD ma anche, nelle versioni più
grandi nell'aeromodellismo, automodellismo, ecc; e nei veicoli elettrici. Esistono applicazioni navali
di tali motori con tecnologie a superconduzione che hanno potenze dell'ordine di MW.
Ultimamente sono molto utilizzati in campo industriale e impiegati nelle macchine automatiche che
necessitano di movimenti precisi e veloci con ingombri decisamente contenuti e grande versatilità,
offerta anche da apparecchiature di controllo programmabili molto sofisticate che danno un
completo controllo e diagnostica del motore.
Il corretto funzionamento del motore brushless è legato alla conoscenza esatta della posizione del
flusso del magnete permanente, ovvero del rotore. Questo perché viene generata coppia solo se i
fasori della corrente di statore mantengono una costante relazione di fase con il flusso di rotore,
secondo il principio di funzionamento dei sistemi elettrodinamici. Il motore sincrono a magneti
permanenti necessita dunque di un sensore di posizione assoluto (resolver o encoder assoluto). In
alternativa, sono allo studio molte tecniche di stima della posizione (tecniche sensorless).
L’avviamento di questo tipo di motore è relativamente complesso. A motore fermo, l'applicazione
della tensione alternata fa sì che il rotore, per effetto dell'inerzia non abbia il tempo di seguire il
campo magnetico rotante, rimanendo fermo. Il motore viene quindi inizialmente portato alla
velocità di rotazione per mezzo di un motore asincrono, quindi, dopo avere scollegato quest'ultimo,
viene collegata la tensione di alimentazione ed inserito il carico meccanico utilizzatore. Un'altra
tecnica di avviamento sfrutta la possibilità di fare funzionare temporaneamente come asincroni
motori appositamente realizzati, quindi passare al modo sincrono.
Il principale svantaggio di questo tipo di motori sta però nel maggiore costo. Al contrario dei motori
a spazzole, come già accennato, il controllo viene effettuato elettronicamente da un ,controller un
dispositivo elettronico fornito dal costruttore del motore o da terze parti; per questo non è
solitamente possibile utilizzare un potenziometro o un reostato (inefficiente ma estremamente
economico).
In alcuni motori progettati per funzionare con frequenza di alimentazione fissa, durante la partenza
e fino alle condizioni di regime, il flusso dell’avvolgimento dello statore induce corrente nei corti
circuiti delle barre di induzione del rotore, che reagisce con il campo generato accelerando verso il
sincronismo; una volta che si sono raggiunte le condizione di regime, non c’è moto relativo tra i due
e perciò non vi è corrente indotta. Il flusso dei magneti permanenti a questo punto termina e la
macchina funzionerà come un motore sincrono convenzionale. Avvicinandosi alla velocità di
sincronia, i magneti permanenti presenti nel rotore, però, possono essere sottoposti a forti effetti
smagnetizzanti dal flusso dell’avvolgimento dell’armatura esterna; a causa di questo, possono
essere usati in questo tipo di motori, solo magneti ceramico ferritici ad alta coercitività o magneti
prodotti da terre rare aventi caratteristiche di smagnetizzazione lineari.
82
Attuatori elettromagnetici
Questo attuatore converte una corrente in una forza ad essa proporzionale. Da un punto di vista
costruttivo è identico al trasduttore di velocità lineare; ne differisce per l'impiego che se ne fa.
Si tratta di un barretta di materiale ferromagnetico magnetizzata, parzialmente inserita in un
solenoide .
Fig. 5.7
Alimentando il solenoide con una corrente I, il magnete viene attirato o respinto con una forza F, la
cui intensità può essere valutata con le seguenti considerazioni.
La tensione che si sviluppa ai capi del solenoide, in conseguenza del moto del magnete, è
V =N
d ΦB
dove N è il numero di spire per unità di lunghezza, ΦB è il flusso di B proprio della
dt
barretta magnetizzata,.
Per la conservazione della potenza, è necessario che sia: VI=Fv; ne consegue che:
F=
d ΦB I
VI
=N
v
dt v
Dove v sta ad indicare la velocità del magnete.
Talvolta il magnete permanente viene sostituito con una barretta di materiale ferromagnetico non
magnetizzata. Nasce ancora una forza agente sulla barretta, in quanto la corrente circolante nel
solenoide provoca la magnetizzazione di quest'ultima; tuttavia, poiché il flusso B risulta anch'esso
proporzionale ad I, la forza così generata è proporzionale al quadrato di I. In questo caso la forza ha
sempre verso tale da spingere la barretta entro il solenoide.
83
Attuatori a bobina mobile
Gli attuatori a bobina mobile, inizialmente utilizzati solo per la produzione di altoparlanti, sono via
via diventati sempre più frequentemente utilizzati per una vasta gamma di esigenze. Applicazioni
tipiche includono il posizionamento della testina di lettura/scrittura per gli hard disk dei computer,
servo valvole comandate o particolari di scanner.
Essi vengono utilizzati molte volte al posto dei motori a corrente continua o dei motori passo-passo
nelle applicazioni in cui è necessaria una precisione di posizionamento elevata, con una corsa
relativamente breve.
Vi sono due configurazioni possibili:
-La prima utilizza un magnete a forma di disco semplice
-L’altro utilizzando un magnete orientato radialmente
Fig. 6.7
In questo tipo di attuatori, il magnete permanente è fisso sulla struttura di ferro dolce, invece la
bobina si muove linearmente lungo il traferro. La rigidità meccanica della bobina è dovuta
all’incapsulamento della stessa in una resina epossidica. La massa della bobina mobile è molto
bassa, questo dà all’attuatore un tempo di risposta rapida.
Il limite di questo tipo di attuatori è che il loro movimento può essere soltanto in direzione
strettamente lineare, e solo in certe occasioni, può assumere archi di rotazione limitati.
Due magneti permanenti ad alta coercitività generano un flusso diretto nella parte centrale di un
nucleo di ferro dolce, il flusso poi ritorna al magnete mediante due piastre laterali. La bobina è
montata su un braccio meccanico, che sostiene la sua corsa lungo la parte centrale tra i magneti.
L'induttanza della bobina non è molto bassa, e la più lunga costante di tempo inibisce l’abilità
dell’attuatore di raggiungere elevate prestazioni.
84
Una tecnica che è comunemente impiegata per ridurre l’induttanza è quella di aggiungere un anello
sotto forma di un tubo di rame nella parte centrale, nelle immediate vicinanze della bobina mobile,
come mostrato in figura. Questo crea un effetto trasformatore con la bobina, riducendo l’induttanza
di un fattore di circa 40.
Un ulteriore tipo di attuatori a bobina mobile, sono a forma schiacciata e molto più sottili di quelli
convenzionali (flat coil).
Fig. 7.7
La bobina ha una induttanza intrinsecamente bassa, questa è dovuta ad un ampio strado d’aria
comprendente il traferro principale e i magneti. Comunque, il layout tradizionale è solitamente
preferito per le applicazioni dinamiche.
Sistemi di trazione (motori lineari)
Un motore lineare è un motore elettrico in cui il rotore e lo statore invece di essere circolari sono
"srotolati", ed invece di produrre un momento torcente producono una forza lineare.
Esistono molte soluzioni progettuali per motori lineari, che possono essere suddivise in due
categorie: a bassa accelerazione e ad alta accelerazione. I motori a bassa accelerazione sono adatti
per treni a levitazione magnetica (Maglev). I motori ad alta accelerazione sono più piccoli ed usati
per accelerare oggetti a velocità molto elevate. Sono usati prevalentemente per studi di collisioni ad
alta velocità, armi, propulsione spaziale, e come attuatori per assi di macchine utensili e centri di
lavoro. Anche gli acceleratori di particelle lineari rientrano in questa categoria.
Motori lineari a bassa accelerazione
Il concetto di motore lineare fu sviluppato dal professor Eric Laithwaite dell'Imperial College di
Londra. In questo progetto, come in molti motori lineari a bassa accelerazione successivamente
realizzati, la forza è prodotta da una serie di elettromagneti che generano un campo magnetico
scorrevole, il quale interagisce con elementi conduttori fissi sulla guida.
85
I conduttori possono essere anelli, solenoidi e semplici pezzi di metallo. Il campo magnetico
prodotto dall'elettromagnete induce nei conduttori, per effetto della legge di Faraday-NeumannLenz, una corrente elettrica che agisce respingendo il campo inducente. Questo causa una forza che
spinge il veicolo in senso opposto a quello di scorrimento del campo magnetico.
Fig. 8.7
Questa tecnica è impiegata in sistemi di trasporto a levitazione magnetica, come i treni Maglev
installati a Shanghai(il primo nato)Vancouver e Toronto (Canada), all'aeroporto JFK di New York e a
Kuala Lampur in Malesia. Il sistema è usato anche in alcune montagne russe ed è stato proposto in
esecuzione verticale come ascensore per i pozzi delle miniere.
Motori lineari ad alta accelerazione
Questi motori hanno molte potenziali applicazioni. Sono presi in considerazione per realizzare armi
in grado di perforare corazze, poiché con il motore lineare possono essere lanciati piccoli oggetti
metallici ad altissima velocità e con grande energia cinetica. Sono anche studiati come motori per la
propulsione spaziale, poiché possono espellere massa ad alta velocità.
Recentemente i motori lineari ad alta accelerazioni trovano impiego anche in apparecchiature
dedicate alla produzione di schede elettroniche, come i sistemi di posizionamento dei componenti
(anche definite "Pick & Place") ed i sistemi di collaudo automatico (flying probe o sonde mobili).
L'applicazione dei motori lineari in queste apparecchiature consente di ottenere prestazioni, in
termini di velocità di spostamento, decisamente superiori a quelle ottenibili con altre tipologie di
motori elettrici.
86
La realizzazione di motori ad alta accelerazione è complessa e la difficoltà principale è data dalla
necessità di ottenere una enorme quantità di energia in brevissimo tempo, non fornibile dai comuni
generatori elettrici. Per questo scopo sono spesso usati i condensatori, che sono però costosi ed
ingombranti. In alternativa vengono usati particolari generatori elettrici detti omopolari in grado di
convertire rapidamente l'energia cinetica accumulata in un volano in energia elettrica.
Un altro problema è dato dalla necessità di produrre campi magnetici di eccezionale intensità, tale
a volte da rendere inutilizzabili i magneti superconduttori. Il problema viene superato con
particolari soluzioni tecniche e speciali elettromagneti.
Sensori
I sensori sono diventati un mercato importante per i magneti permanenti grazie ai loro requisiti in
termini di prestazioni. Si è andati gradualmente alla sostituzione, di controlli di movimento
meccanici con questi tipi di dispositivi, come ad esempio, nei comandi di volo degli aeromobili,
nelle regolazioni di unità industriali, o nel sistema automobilistico ABS.
In un ciclo chiuso di controllo della velocità, per un continuo monitoraggio della posizione o della
velocità, si utilizza un sensore che tramite impulsi elettrici permette la gestione del sistema.
Per la produzione dei sensori, vengono utilizzate comunemente varie tecnologie, tra cui quelle al
silicio, ottiche o capacitive oltre ovviamente a quelle magnetiche. Nella maggior parte delle
applicazioni, è anche importante per il sensore essere economico ed affidabile, quest’ultima
caratteristica si traduce in un dispositivo non a contatto col sistema, al fine di evitare contatti
resistivi, abrasioni e interferenze nel segnale. I sensori ottici sono i più comuni che si possono
trovare all’interno degli impianti industriali, ma la loro costruzione non è robusta e la loro
funzionalità è decisamente ridotta in ambienti ostili. A causa di questo, i sensori magnetici sono
diventati molto utilizzati nel settore delle automobili, ed in molte altre applicazioni in cui operano in
condizioni di sporco, umido, sottoposti ad alte temperature e ad elevate vibrazioni.I sensori
magnetici, sono generalmente utilizzati per misurare la posizione angolare o la velocità di rotazione,
ma sono anche adatti a misurazioni di tipo lineare. Molti di essi, sono generatori di pulsazioni, il
conteggio è proporzionale alla posizione, e la frequenza è proporzionale alla velocità.
Un interruttore Reed è un semplice sensore magnetico, nel quale un contatto elettrico è formato
da una struttura mobile di ferro dolce, che va a chiudere il circuito sotto l’influenza di un campo
magnetico. Il funzionamento del sensore è dovuto sia direttamente attraverso la variazione del
campo magnetico generato dall’utilizzo di un magnete multi-polo che indirettamente grazie alla
modulazione del campo magnetico .
87
In entrambi i casi però, la frequenza operativa dei contatti elettrici è limitata intorno ad un valore
basso di circa 600 Hz, e la natura elettromeccanica di questi dispositivi , raramente soddisfa i criteri
di affidabilità di oggi.
In molti sensori magnetici, il campo del magnete permanente è misurato utilizzando un elemento
semiconduttore che esibisce l’effetto Hall. Quando una corrente I è applicata lungo la lunghezza del
sensore di Hall, con una costante caratteristica RH, una tensione VH è sviluppata in tutta la sua
larghezza, che è proporzionale alla densità del flusso B attraverso il suo spessore t:
V H =
RH
⋅I B
t
Tutti i sensori possono ovviamente usati per produrre una tensione, proporzionale al campo
applicato, ma spesso il loro segnale viene elaborato in modo da fornire un segnale uscente digitale
come un generatore di pulsazioni; il segnale analogico è settato per passare o bloccare
predeterminati livelli. Un vantaggio importante dei sensori di Hall è che, diversamente dai
dispositivi ad induzione, la loro tensione di uscita è indipendente dalla velocità di rotazione, perciò
non c’è perdita di informazioni nel caso in cui i dati non vengano immagazzinati per un certo
periodo di tempo.
I sensori di Hall sono frequentemente utilizzati in tutti i circuiti magnetici che esibiscono riluttanza
variabile con la posizione angolare.
Fig. 9.7
Nella figura è rappresentato una semplice configurazione utilizzata tradizionalmente
nell’accoppiamento sistema-sensore; quest’ultimo, composto da un magnete permanente
affacciato su di una ruota di ferro dolce, i denti di quest’ultima, causano una modulazione della
riluttanza del circuito magnetico durante la rotazione. La conseguente variazione nel flusso del
traferro è misurata attraverso il sensore di Hall, montato sulla faccia del magnete. A causa della sua
semplicità, questo modello raggiunge scarsa concentrazione del flusso magnetico nel traferro, non
ottimizzando le variazioni di riluttanza, ed è quindi limitato all’utilizzo in applicazioni con piccoli
spostamenti angolari.
88
Un dispositivo a riluttanza variabile alternativo, impiega un sistema di palette di ferro dolce, che
possono essere disposte a disco [a], o in una geometria cilindrica [b].
Fig. 10.7
Le principali applicazioni utilizzano la prima configurazione, ma essa è limitata all’utilizzo per basse
risoluzioni angolari, in modo da raggiungere sufficienti variazioni nella riluttanza del circuito
magnetico . Più alte risoluzioni angolari, possono essere ottenute senza una riluttanza variabile,
attraverso l’utilizzo di un rotore a magneti permanenti cilindrico, fatto da un materiale isotropico
con una struttura magnetizzata sulla superficie. Il sensore di Hall può essere montato in questo
caso, direttamente sulla circonferenza della ruota , per misurare il cambiamento nel flusso radiale
attraverso il suo spessore durante la rotazione della stessa.
Vi sono poi ulteriori tipologie di sensori, tra cui alcune di esse hanno struttura eteropolare
magnetizzata sulla superficie del disco della ruota, il sensore montato su questa superficie piana
andrà a misurare il flusso assiale.
Fig. 11.7
Siccome i poli del rotore operano in un circuito magnetico aperto, la costruzione di questi dispositivi
risulta davvero semplice, utilizza infatti soltanto due componenti, un magnete che funge da rotore
ed un sensore di Hall. Una caratteristica importante di questi sensori è il fatto che offrono tolleranze
abbastanza elevate di montaggio tra statore e rotore, portandoli direttamente all’interno del range
entro il quale il generatore di impulsi è realizzato con successo.
89
I sensori di Hall digitali commercializzati generalmente incorporano i circuiti di elaborazione del
segnale per fornire un’uscita impulsiva, hanno i livelli di “blocca” e “rilascia” attorno al valore di
0,03 T. In caso di maggiore sensibilità necessaria sia per aumentare il raggio di azione o la
risoluzione del dispositivo, allora il segnale analogico fornito dal sensore di Hall può essere utilizzato
con un circuito amplificatore . Alternativamente, vi sono due tipi di sensori che possono essere
considerati i cui output sono indipendenti dalla velocità di rotazione, ma che richiedono soltanto
0,005 T per un responso soddisfacente.
Il primo è basato sull’effetto Wiegand in una bobina e cioè sulla non linearità della forza magnetica,
il cui nucleo è costituito da particolari di due diversi materiali magnetici in modo che variazioni nel
campo applicato generino salti di flusso, e quindi pulsazioni della tensione.
L’altro invece, si avvale di un elemento magnetoresistivo, la cui resistenza varia a seconda della
misura e dell’orientazione del campo applicato; essi possono essere incorporati in un circuito e ad
un amplificatore per generare pulsazioni.
La maggiore densità di flusso generata dai materiali per magneti permanenti con maggiore energia ,
permette un funzionamento più affidabile ed inoltre aumentano ulteriormente le tolleranze di
montaggio. Con una grosso traferro, la linea di carica, posizionerà il punto di applicazione del
magnete più in basso lungo la sua curva di smagnetizzazione , la quale vien preferita
sostanzialmente lineare con un’alta coercitività.
Aumentando il volume o la densità di energia del materiale magnetico, il corrispondente aumento
di energia del traferro può essere utilizzato al fine di fornire un range più ampio per l’elemento di
rilevamento . Quando un sensore magnetico impiega un singolo magnete permanente in una
semplice configurazione a riluttanza variabile, è comune l’utilizzo di un piccolo magnete con la più
alta densità di energia possibile; questo giustifica l’utilizzo di materiali come Nd2Fe14B. Anche, le più
complesse strutture eteropolari, prevedono un utilizzo molto ridotto di un grande volume
magnetico, al massimo solo un paio di poli adiacenti interagiscono col sensore in ogni periodo;
magneti sinterizzati o legati ceramico ferritici facilmente magnetizzabili isotropicamente sono i più
utilizzati in questo tipo di applicazioni.
90
CONCLUSIONI
Come detto in premessa lo scopo della tesi era sostanzialmente quello dell’analisi dei materiali per
magneti permanenti.
Il lavoro pertanto è stato indirizzato ad una approfondita ricerca dei predetti materiali e dei loro
comportamenti al fine di assicurare un’adeguata risposta all’esigenza di poter disporre di magneti
permanenti che abbiano le caratteristiche di impiego desiderate
Essendo una tesi orientata all’analisi delle caratteristiche dei diversi materiali utilizzati, non si è
ritenuto opportuno procedere alla formulazione di ipotesi teoriche quanto di evidenziare le diverse
specifiche e i connessi comportamenti dei vari materiali.
Dallo studio condotto sono emerse le significative differenze fra i materiali, che pur avendo
caratteristiche e proprietà molto diverse tra loro, hanno trovato nel mercato vari sbocchi a seconda
delle applicazioni, queste dipendono dall'esigenza di avere bassi costi a svantaggio delle proprietà
magnetiche, come ad esempio nel campo dell'automotive dove vengono utilizzati per lo più
magneti ceramico ferritici, oppure dall'opposta necessità di avere elevate caratteristiche
magnetiche pur utilizzando componenti onerosi, ed è proprio in questo verso che vengono preferiti
i magneti prodotti da terre rare nei campi dove un'elevata precisione si accompagna all'utilizzo di
prodotti con caratteristiche superiori.
Questi ultimi sono stati ulteriormente sviluppati, soprattutto i magneti ottenuti dal samario cobalto
considerato il materiale con le migliori prestazioni e caratteristiche magnetiche, nell'ambito di
nuove applicazioni come le nanotecnologie.
In questo senso si citano le sperimentazioni condotte in questi ultimi anni presso la Northestern
University, che hanno costituito una pietra miliare per aumentare il potenziale e ridurre la
complessità dei costi di trasformazione.
Tale invenzione che presenta aspetti di per sé rivoluzionari, non consentirà solo la rivitalizzazione
dell’industria dei magneti permanenti di questo tipo, ma prospetticamente determinerà significativi
cambiamenti negli usi industriali e commerciali che dall’attuale sostanziale interesse militare si
espanderanno con sempre maggiore intensità verso le tecnologie emergenti e le applicazioni
biomediche.
91
BIBLIOGRAFIA
Bertolotti G. Hysteresis in magnetism
Campbell P. Permanent magnet materials and their application
Campbell P. Magnetoresistive sensor for high resolution position encoding
Franceschetti G. Guida ai magneti permanenti
Hadfield, D Permanent magnet and magnetism
J.Studder, J Parker Permanent magnets and their applications
Jones, F.G. Metallurgical processes for making rare-earth transitino metal magnet percursor alloys.
Lee R. W. Brewer, E.G and Shaffel, N.A. Processing of neodymium – iron – boron melt-spun ribbons to fully
dense magnets
Parker, R.J. Advances in permanent magnetism.
92