Il motore in c.c. è stato il motore elettrico maggiormente impiegato
negli azionamenti a velocità variabile; ciò è dovuto sia alla maggiore
semplicità costruttiva dei convertitori con uscita in corrente continua
rispetto a quelli con uscita in corrente alternata sia alla minore
complessità dei dispositivi necessari per il suo controllo.
Per contro, rispetto ai motori in corrente alternata, quello in corrente
continua necessita di una maggiore manutenzione e risulta più
pesante, più ingombrante e più costoso. Inoltre, la presenza di un
collettore a segmenti limita sia la velocità massima di
funzionamento della macchina sia la tensione massima applicabile.
Le macchine in corrente
continua sono composte da una
parte fissa (statore o induttore)
e da una parte rotante (rotore o
indotto).
Lo statore comprende i i poli principali, che generano il campo
principale o di eccitazione (circuito di eccitazione); inoltre, possono
essere presenti anche poli ausiliari o di commutazione e avvolgimenti
di compensazione.
Nel rotore è disposto un
circuito (circuito di indotto o
circuito di armatura),
costituito da un
avvolgimento, chiuso su se
stesso, che presenta
numerosi collegamenti,
interspaziati fra loro, a un
collettore a lamelle su cui
poggiano le spazzole che ne
permettono il collegamento
con l’esterno.
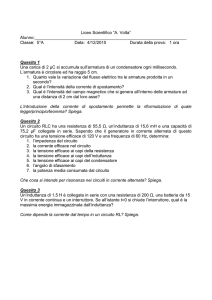
Trascurando la presenza dei
poli ausiliari e dei circuiti di
compensazione, la struttura
del motore in corrente
continua può essere
ricondotta a quella riportata in
figura.
Induttore
Indotto
Tale struttura, originariamente proposta da Pacinotti, pur essendo
stata impiegata solo nelle prime realizzazioni, permette di
semplificare la comprensione del funzionamento della macchina.
Nelle macchine tradizionali, alimentate da una sorgente in corrente
continua, l’induttore è realizzato in ferro massiccio. Nei motori
impiegati negli azionamenti, in cui la corrente di armatura può
subire rapide variazioni, è preferibile realizzare anche l’induttore in
ferro laminato.
La struttura riportata in figura presenta una sola coppia di spazzole;
nella pratica, per ridurre le dimensioni della macchina e per
aumentare il valore nominale della corrente di armatura, si impiega
un maggior numero di coppie di spazzole.
Le spazzole sono, alternativamente, disposte in parallelo in modo
da ottenere due soli terminali di uscita; pertanto, il modello che
descrive il comportamento statico e dinamico della macchina può
essere ricavato come se la macchina avesse una sola coppia polare.
Spazzole
La corrente continua che circola nell’avvolgimento del circuito
di eccitazione produce un campo magnetico nella direzione
dell’asse delle espansioni polari (asse polare); l’intensità del
flusso concatenato con tale avvolgimento (e) dipende da quella
della corrente di eccitazione (ie) secondo una funzione non
lineare (curva di magnetizzazione).
La corrente continua che
circola nell’avvolgimento
del circuito
di eccitazione produce un
campo magnetico nella
direzione dell’asse delle
espansioni polari (asse
polare).
Asse
polare
Dipendenza del flusso concatenato con una
spira dalla sua posizione
Quando il rotore ruota con una velocità angolare e nessuna
corrente è applicata alle spazzole, su ciascuna spira del circuito
di armatura viene indotta una forza elettromotrice (f.e.m.), la
cui ampiezza, proporzionale alla velocità e al flusso di
eccitazione, assume, al variare della posizione della spira
rispetto all’asse polare, un andamento del tipo di quello
illustrato nella prossima figura.
La somma delle f.e.m. indotte su tutte le spire è nulla; ne
consegue che, quando il circuito di armatura non è alimentato,
nelle spire non circola alcuna corrente.
Asse interpolare
Se le spazzole giacciono sull’asse interpolare, tutte le
spire che si trovano sullo stesso lato rispetto all’asse
delle spazzole hanno f.e.m. indotte con lo stesso
segno.
Ai capi delle spazzole è, quindi,
indotta una f.e.m. (em) di ampiezza
proporzionale, secondo un
em
coefficiente K, che dipende dal
numero di spire e dalla struttura
geometrica della macchina, al
prodotto tra la velocità angolare e il
flusso di eccitazione, cioè:
Quando il circuito di armatura è alimentato, la corrente (ia) che in
esso circola produce un forza magnetomotrice e, conseguentemente,
un flusso nella direzione dell’asse interpolare.
Tale forza magnetomotrice modifica la distribuzione dell’induzione
al traferro e, quindi, la legge secondo cui varia la f.e.m. indotta sulle
singole spire. Per contrastare questo fenomeno vengono introdotti
ulteriori avvolgimenti (poli di commutazione e avvolgimenti di
compensazione).
La struttura del motore in c. c. descrita mal si presta a una pratica
realizzazione.
Innanzi tutto non è conveniente che le spazzole si appoggino
direttamente sui conduttori ma risulta più opportuno fare
strisciare le spazzole su un collettore a segmenti, effettuando un
collegamento elettrico fra i conduttori dell’avvolgimento di
armatura ed i segmenti del collettore (opportunamente isolati tra
loro).
em
Introduzione del collettore
Anche l’anello rotorico risulta di difficile realizzazione. Si può,
però, osservare che, ai fini della produzione della f.e.m. e della
coppia, risultano attivi solo i tratti di conduttore adagiati sulla
periferia esterna dell’indotto; è quindi preferibile utilizzare,
invece di un avvolgimento ad anello, un avvolgimento disposto
in cave sulla sola superficie esterna del rotore.
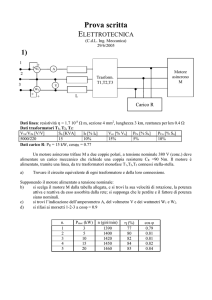
Quest’ultimo viene realizzato con un pacco di lamierini di
materiale ferromagnetico, che, essendo il circuito di armatura
interessato da f.e.m. di tipo alternativo, sono isolati elettricamente
tra loro con una apposita vernice superficiale.
I lamierini hanno la forma di una corona circolare e presentano
nella parte esterna delle cave e dei denti.
L’avvolgimento di armatura
viene realizzato mediante
matasse di conduttori e
ogni matassa, oltre a essere
posta in serie alle altre con
diverse combinazioni
circuitali, e’ in genere
collegata a una lamella del
collettore.
Denti
Cave
Conduttori dell’avvolgimento di
armatura
Struttura del rotore del motore in c.c.
Tutti i conduttori che si trovano
da un lato rispetto al piano delle
spazzole sono percorsi dalla
stessa corrente (pari ad ia /2)
mentre in quelli che si trovano
dall’altro lato la corrente ha la
direzione opposta.
I conduttori del circuito di armatura sono inseriti nel campo
magnetico prodotto dal circuito di eccitazione. Su ogni
conduttore si sviluppa, quindi, una forza di intensità
proporzionale all’induzione magnetica alla quale il
conduttore è soggetto, alla sua lunghezza e alla corrente
che in esso circola.
Ogni forza produce, quindi, un momento torcente (coppia) pari
al prodotto tra la forza e il raggio rotorico.
Forze generate dall’interazione tra le correnti nei conduttori
rotorici ed il campo magnetico di eccitazione
La somma dei momenti torcenti prodotti dalla forze applicate
ai vari conduttori produce un momento complessivo (indicato
come coppia motrice) che porta in rotazione il motore.
La coppia motrice risulta, quindi, proporzionale al flusso di
eccitazione e all’intensità della corrente di armatura.
Si vedrà in seguito (effettuando un bilancio energetico) che il
coefficiente di proporzionalità è uguale al coefficiente K già
introdotto nell’espressione delle f.e.m.
Le prestazioni della macchina in c.c. sono limitate dai valori
massimi che possono assumere varie grandezze.
Oltre alle limitazioni sulla densità di corrente nei conduttori dei
vari avvolgimenti e sull’induzione al traferro, comuni a tutte le
macchine elettriche, la macchina in c.c. presenta specifici limiti
di funzionamento dovuti alla presenza del collettore.
Tali limiti riguardano l’intensità della corrente applicabile alle
spazzole, la velocità periferica del collettore e la tensione tra
due successive lamelle, e, di conseguenza, la tensione totale
che può essere applicata al circuito di armatura.
Nelle macchine tradizionali, alimentate da una sorgente a
tensione costante, gli avvolgimenti di eccitazione e di armatura
sono, in genere, connessi tra loro (motore con eccitazione
serie, eccitazione parallela, eccitazione compound).
Viceversa, quando l’alimentazione è ottenuta mediante
convertitori statici, i due avvolgimenti sono quasi sempre
alimentati separatamente (motore con eccitazione
indipendente).
Nel funzionamento a regime permanente, cioè quando tutte le
variabili elettromagnetiche e meccaniche sono costanti,
l’avvolgimento del circuito di eccitazione presenta solo una
caduta resistiva, mentre in quello di armatura è presente anche
la f.e.m. em, dovuta alla rotazione del circuito di armatura:
Si può osservare che, quando la macchina funziona da motore,
la f.e.m. si oppone alla circolazione della corrente di armatura
e assume, quindi, il ruolo di una forza controelettromotrice
(f.c.e.m.).
Nel funzionamento dinamico occorre considerare, oltre alle
cadute resistive ed alla f.e.m. mozionale, anche le f.e.m. dovute
alle variazioni dei flussi concatenati con i due avvolgimenti.
Il modello dinamico viene, in genere, ricavato trascurando le
perdite nel ferro, la cui presenza, rilevante ai fini energetici,
cioè per la determinazione del rendimento e delle perdite, non
altera in maniera significativa il comportamento dinamico della
macchina.
Modello del circuito di eccitazione
Modello del circuito di armatura
Moltiplicando ambo i membri dell’equazione del circuito di
eccitazione per la corrente ie e quelli dell’equazione del circuito di
armatura per la corrente ia e sommando membro a membro le due
equazioni così ottenute, si ricava:
Esaminando i vari termini si constata che:
Dal bilancio energetico, si ricava quindi che il termine em ia
risulta uguale alla potenza trasformata da elettrica a meccanica.
La potenza trasformata da elettrica a meccanica è anche pari al
prodotto tra la coppia elettromagnetica cm e la velocità angolare
del motore .
Il valore della coppia elettromagnetica può essere calcolato
mediante la seguente espressione:
che può essere riscritta come:
Considerando perfetta la compensazione della reazione di armatura
e trascurando le variazioni delle induttanze (Le ed La) del circuito
di eccitazione e di quello di armatura dovute alla saturazione dei
circuiti magnetici, i flussi di eccitazione e di armatura sono
proporzionali alle rispettive correnti. Pertanto, le equazioni di
eccitazione e di armatura possono venire riscritte come:
Indicando, infine, con K il prodotto K Le, le espressioni della
f.c.e.m. e della coppia elettromagnetica diventano:
Le due equazioni che descrivono il comportamento dinamico
dei circuiti di eccitazione e di armatura sono lineari, è quindi
possibile riscriverle in funzione delle trasformate di Laplace
delle correnti e delle tensioni:
Per determinare la velocità di rotazione del motore, è necessario
considerare, oltre alle equazioni elettromeccaniche, anche il
comportamento del carico.
A tale scopo si può utilizzare il modello linearizzato già considerato:
che, in termini di trasformate, può essere riscritto come:
Il modello del motore è, quindi, costituito da blocchi dinamici
lineari e blocchi istantanei non lineari
Per comodità, i blocchi lineari sono stati individuati con le loro
funzioni di trasferimento nel dominio della variabile di Laplace,
invece che con le loro equazioni differenziali.
Schema di simulazione in Matlab-Simulink
Come sarà mostrato in seguito, il controllo della velocità del motore
in c.c. può venire effettuato impiegando diverse modalità.
In alcune di esse, i blocchi non lineari, che compaiono nello schema
generale del motore, eseguono il prodotto tra un segnale variabile e
uno costante e possono essere sostituiti da blocchi lineari istantanei.
Quando ciò avviene per entrambi i blocchi non lineari, il modello
del motore risulta di tipo lineare ed è possibile ricavare le funzioni
di trasferimento che legano tra loro le piene escursioni delle
variabili.
In caso contrario, è possibile ricavare solo funzioni di
trasferimento relative a piccole escursioni delle variabili,
linearizzando il comportamento del motore nell’intorno di un
punto di lavoro.
Quest’ultima limitazione è, ovviamente, necessaria qualora
i termini non lineari presenti nell’equazione che fornisce la
coppia resistente non siano trascurabili.
Nel funzionamento a regime permanente le derivate della velocità e
delle correnti sono nulle, le equazioni del modello del motore si
semplificano in:
Con pochi passaggi si ottiene la seguente espressione della coppia:
Tale equazione mostra che, quando entrambe le tensioni (di
eccitazione e di armatura) sono costanti, la caratteristica statica
coppia-velocità del motore in c.c. è lineare.
Quando la coppia resistente è nulla, la velocità del motore è pari a
mentre, quando è fermo, il motore fornisce una coppia pari a:
Il circuito di armatura assorbe dall’alimentazione una potenza
elettrica (Pa) pari a:
una parte di questa potenza:
viene trasformata in potenza meccanica, mentre la parte
rimanente:
viene dissipata sulla resistenza del circuito di armatura.
Anche il circuito di eccitazione assorbe potenza; tale potenza non
viene, però, trasformata in energia meccanica e viene totalmente
dissipata sulla resistenza del circuito di eccitazione.
Trascurando la potenza dissipata nel circuito di eccitazione, che
dipende solo dalla tensione applicata al circuito e che risulta,
comunque, notevolmente più piccola di quella nominale del
motore, il rendimento di conversione da energia elettrica a energia
meccanica risulta:
Osservando, infine, che:
si può dedurre che il rendimento di conversione è pari al rapporto
tra il valore attuale della velocità di rotazione del motore e quello
in corrispondenza al quale la coppia si annulla, cioè:
Se, mantenendo
costante la tensione di
eccitazione, si fa
variare quella di
armatura, i valori
delle intercette sugli
assi variano in
maniera
proporzionale a Va.
Non tutto il tratto
delle caratteristiche
statiche, compreso
tra i due assi, risulta
però utilizzabile, sia
per evitare bassi
rendimenti di
conversione sia per
limitare la corrente
di armatura.
A parità di corrente applicata al circuito di eccitazione, la coppia
risulta direttamente proporzionale all’intensità della corrente
di armatura; pertanto, le limitazioni sul valore di quest’ultima
comportano una limitazione sul valore massimo della coppia.
Coppia massima indipendente dalla velocità.
Se, invece, si mantiene costante la tensione di armatura e si fa
variare la tensione di eccitazione (facendole assumere valori
inferiori a quello nominale), al variare di Ve, varia il valore del
coefficiente angolare delle caratteristiche statiche, che risulta
pari a:
e le caratteristiche statiche assumono l’andamento riportato
nella prossima figura.
Anche in questo caso, non tutto il tratto delle caratteristiche
statiche, compreso tra i due assi, risulta utilizzabile a causa dei
limiti che occorre imporre alla corrente di armatura.
A differenza del caso precedente, però, la coppia massima
varia da una caratteristica all’altra e diminuisce al diminuire
della tensione di eccitazione.
Potenza massima
indipendente dalla velocità.