TRASDUTTORI DI MISURA
A cura di Paolo Tripicchio
Un aspetto importante e a volte critico nell’installazione di un sistema di controllo riguarda
la scelta e l’integrazione degli strumenti di misura. In particolare è necessario valutare la
precisione statica e il comportamento dinamico dello strumento che si vuole utilizzare.
L’attenta scelta delle caratteristiche dello strumento, nonché la corretta localizzazione ed
installazione garantiscono che i ritardi e i rumori di misura siano minimizzati.
In generale un dispositivo di misura sarà caratterizzato da:
•
•
•
Un elemento sensibile primario
Un trasduttore che trasforma la natura del segnale
Un amplificatore che aggiusta il livello/intensità del segnale per l’integrazione con
l’unità di calcolo o altra elettronica
Quindi quando si parla di trasduttore o sensore si intende un dispositivo che è in grado di
convertire un segnale misurato (grandezza fisica) in un segnale elettrico.
Oltre alle caratteristiche metrologiche fondamentali è opportuno considerare nella
scelta/acquisto di un sensore il costo, la disponibilità, la robustezza rispetto all’ambiente di
lavoro, il tempo di vita, l’alimentazione richiesta etc..
Misurando
Sensore
Misura
Sensori di forza
Stress e Strain
Lo stress e lo strain sono due grandezze che si riferiscono alla deformazione di corpi
soggetti ad una forza. Dato il seguente cilindro sottoposto alla forza F si ha:
Stress tensionale: F / A [ N / m2 ]
Strain tensionale: ∆ l / l [adimensionale]
Se il verso della forza è opposto a quello della figura si parla allora di stress
compressionale e strain compressionale.
Dato il cubo in figura soggetto ad una forza torsionale si definiscono:
stress torsionale: F / A [N / m2]
strain torsionale: ∆ x / l [adimensionale]
Attraverso lo stress e lo strain si possono definire altre due grandezze:
MODULO DI YOUNG E = stress compressionale / strain compressionale
MODULO DI ELASTICITA’ M = stress torsionale / strain torsionale
Si vuole ora dimostrare la relazione tra variazione di resistenza e strain. Dato un filo di
rame di lunghezza l, sezione A e sottoposto ad una forza F la cui resitenza è:
= Se al filo di rame viene applicata una forza come in figura, si ottiene una variazione della
lunghezza (∆ l) e una variazione dell’area (∆ A). Il volume (V) rimane costante. Per cui:
V = lA = l + ∆l − ∆ = + ∆ − ∆ − ∆∆
Se si applica la forza F allora cambia anche la resistenza del materiale:
= + ∆
− ∆
Estensimetro
Un estensimetro è un sensore che ha la caratteristica di trasformare una sollecitazione
meccanica in una variazione di resistenza. Costruttivamente esso è costituito da una
griglia, composta da una delle leghe di rame-nickel e nickel-cromo aventi un’aggiunta di
alluminio e ferro, e da un supporto.
Il supporto permette la manipolazione dell’estensimetro, mette a disposizione una
superficie per poter incollare l’estensimetro all’oggetto di cui si vuole misurare la forza
applicata e isola la griglia con l’oggetto in questione.
La variazione di resistenza dell’estensimetro può essere causata non solo
dall’applicazione di una forza ma anche dalla variazione di temperatura. Per questo motivo
spesso questo sensore viene montato su un ponte di Wheatstone in modo tale da
misurare solo le variazioni di resistenza dovute all’applicazione di forze.
Un’evoluzione del precedente estensimetro è il trasduttore piezoresistivo. In esso viene
sostituita la lamina metallica con un cristallo di silicio. In questo caso viene misurata la
variazione di resistività di un elemento di silicio con drogaggio p oppure n.
Gli estensimetri hanno un costo relativamente basso, sono di facile utilizzo, hanno una
massa e dimensioni ridotte e sono disponibili in una differenziata varietà di configurazioni.
Le applicazioni di questo sensore coprono l’intero campo delle misure di forza e pesatura.
Vengono inoltre utilizzati per il controllo dell’allineamento di sistemi di irrigazione in
agricoltura e come sensori tattili in robotica.
La deformazione elastica dell’elemento spring su cui vengono montati gli estensimetri
viene letta tramite una configurazione a ponte di wheatstone. Bisogna però prestare
attenzione perché il valore della resistenza dipende anche dalla temperatura.
La sensibilità di un estensimetro è data dal Gauge Factor G.
∆
=
Vediamo come si ricava il significato fisico di G.
Dalla seconda legge di Ohm si ha
= Con la resistività del materiale, l la lunghezza e s la sezione dell’area.
=
Da cui
∆
+
+
= + +
e infine
∆ ∆ ∆ ∆
=
+ −
∆
∆
= ,
dipende dal materiale , − per una sezione rettangolare vale 2 µ (Modulo di
poisson).
G = 1 + 2 µ , per estensimetri metallici si ha che G ≈ 2.0 , per quelli a semiconduttore G è
di un ordine di grandezza superiore. Questi ultimi sono tuttavia più sensibili alle variazioni
di temperatura.
Ponte di Wheatstone
Il ponte di wheatstone è una configurazione circuitale utile a leggere una variazione di
resistenza.
V − V =
R V
R V
−
R + R R + R !
Ipotizzando R1 = R2 = R3 = R e Rx = R + ∆R :
V − V = "
R
R
∆R
−
$% = "
$%
2R 2R + ∆R
22R + ∆R
Linearizzando con sviluppo in serie di Taylor si ottiene che
% = % +
%&& ∆
4 Quindi una variazione di resistenza crea uno sbilanciamento nel ponte pari a Vcc
∆
(
.
Sensori di posizione
Potenziometri di posizione resistivi
I sensori potenziometrici sono costituiti da un cursore di materiale conduttore, collegato
all’oggetto di cui si vuole misurare la posizione, che scorre su una pista resistiva.
Il dispositivo funziona come un partitore di tensione in cui la variazione della resistenza è
in relazione allo spostamento impresso dal sistema sul quale è montato.
Uno dei possibili simboli circuitali utilizzati è:
Le caratteristiche, che condizionano la scelta di un potenziometro, sono: la massima
tensione che si può applicare (per esempio 60 V in corrente continua); la corsa elettrica,
che determina la distanza massima di rilevamento (che va da alcuni millimetri fino a diversi
metri); la velocità di spostamento, che esprime quanti metri il trasduttore è in grado di
percorrere in un secondo; la precisione, legato alla ripetibilità della misura; la caratteristica
di uscita, che riporta in percentuale, quanto i valori di uscita seguono una legge di linearità;
la risoluzione, che indica la più piccola variazione di valori che il sensore è in grado di
rilevare; il rumore, vale a dire il generarsi di valori di resistenza non desiderati; la durata,
cioè la quantità di manovre che il trasduttore è in grado di svolgere, mantenendo inalterati
tutti i valori.
Solitamente la caratteristica reale del potenziometro non è perfettamente lineare, a causa
di non linearità e di valori finiti di risoluzione. I sensori potenziometrici hanno presenza di
attriti, presenza di effetti inerziali e soffrono di usura. In compenso sono facili da utilizzare,
hanno un basso costo e forniscono un alto valore dei segnali d‘uscita.
I sensori potenziometrici disponibili sul mercato si possono classificare in due grandi
categorie: angolari e lineari.
Un potenziometro lineare è normalmente composto da una resistenza e da un supporto di
ceramica, ma è sempre più facile trovare dispositivi a plastica conduttiva. Questi ultimi non
presentano i problemi di risoluzione dei potenziometri tradizionali, hanno effetti di attrito
limitati, tempi di vita maggiori e basso rumore.
I potenziometri angolari sono costituiti essenzialmente da conduttore avvolto di forma
toroidale oppure da conduttori plastici di forma circolare e sono caratterizzati da una
elevata precisione e risparmio di spazio.
Da cui si ottiene che la tensione di uscita è pari a:
%) = %*
+,
1 + +,
Il teorema di Thévenin per le reti elettriche afferma che qualunque circuito lineare,
comunque complesso, visto da due punti, è equivalente ad un generatore di tensione in
serie ad una resistenza. L'equivalenza vale per quello che accade all'esterno della rete e
non certo per quello che succede all'interno di essa.
Calcolando la resistenza equivalente Thevenin si ottiene:
.ℎ = 1
+,
1 + +,
Quindi le relazioni ingresso uscita hanno la forma:
Se invece si adotta una configurazione del tipo :
Dove R2 è la resistenza totale che si divide in kx e (R2-kx) si ha:
%) = %*
+,
2
Calcolando la resistenza Thevenin equivalente:
.ℎ =
+,2 − +,
2
I grafici ingresso uscita questa volta risultano:
Facciamo ora un esempio di un sensore resistivo di temperatura(PRC 100).
Il PRC100 è una termoresistenza il cui valore cambia in base alla temperatura. In
particolare ha un valore di 100 ohm a 0 °C e subisce una variazione di 3.85 milliohm/ °C.
R1 deve essere dimensionata in modo tale che la potenza termica i^2 R_prc sia molto
inferiore alla potenza massima dissipabile dal PRC100 ovvero il calore autoindotto deve
risultare trascurabile.
Serve quindi una corrente di 10 mA per non dissipare più watt del consentito.
L’alimentazione può essere a 12V/5A oppure a 5V/6A. Nel primo caso si ricava R1≈ 1200
ohm , nel secondo caso R1 ≈ 500 ohm.
La prima soluzione presenta una non linearità minore:
Vo = V
123
41123
∆5
►
Nel primo caso si ottiene
5
∆5
5
12323
= 6161123
= 0.25% mentre nel secondo
∆5
5
= 1%
LVDT
Con l’acronimo LVDT si intende un trasformatore differenziale variabile costituito da un
avvolgimento primario e due avvolgimenti secondari e capace di fornire una tensione in
uscita proporzionale allo spostamento di un nucleo mobile.
Principio di funzionamento:
1. L’avvolgimento centrale viene alimentato con una tensione alternata (con valore
efficace compreso tra i 5 e i 24 V) in modo da avere una variazione di flusso e quindi delle
correnti indotte sugli avvolgimenti secondari (aventi la stessa frequenza di quella
inducente e solitamente compresa tra 500 e 5000 Hz).
2. I due avvolgimenti secondari (da notare che il numero di avvolgimenti sui denti laterali è
la stesso) vengono messi in serie e in opposizione di fase;
3. Quando il nucleo si trova al centro degli avvolgimenti la tensione d’uscita è nulla;
4. Quando il nucleo si sposta dalla posizione centrale si ha in uscita una tensione
proporzionale allo spostamento (le linee di forza si concentrano maggiormente nella
direzione in cui si è spostato il nucleo). Per verificare il verso dello spostamento bisogna
analizzare la fase.
La relazione tra spostamento e tensione in uscita non è perfettamente lineare a causa
della non perfetta opposizione di fase tra i due avvolgimenti secondari e degli errori nella
fase di demodulazione, introdotta per ottenere dal segnale alternato in uscita dal
secondario un segnale continuo proporzionale alla misura (normalmente si hanno valori di
non linearità inferiori allo 0,5%).
La tensione del primario è data da:
%7 = % sin;< .
Le mutue induttanze tra primario e secondari valgono :
=>1 = =0 + +,
=>2 = =0 − +,
Da cui si ottiene:
%1 = % sin;. =>1
%2 = % sin;. =>2
Da cui ∆% = 2% +, *@;.
∆% % sin; . = 2%< +,
ABCDEF G
Il coseno viene eliminato tramite il filtro passa basso mostrato in figura.
Resolver
In pratica un resolver è un trasformatore nel quale gli avvolgimenti secondari possono
essere ruotati rispetto agli avvolgimenti primari. Di conseguenza la mutua induttanza tra
primario e secondario è variabile. Nella forma più comune, un resolver consiste di un
rotore ed uno statore ciascuno dei quali ha due avvolgimenti separati posizionati
precisamente ad angolo retto tra di loro come visibile in figura.
Poiché i due avvolgimenti statorici sono fisicamente ed elettricamente a 90 gradi tra di
loro, non c’è accoppiamento magnetico. Gli avvolgimenti statorici sono montati
staticamente sul resolver. Ugualmente anche nel rotore non c’è accoppiamento magnetico
tra i suoi avvolgimenti. Gli avvolgimenti rotorici però sono montati su un albero di un
motore e ruotano con esso. Il rotore è in grado di compiere qualsiasi rotazione così che è
possibile posizionare gli avvolgimenti a qualsiasi angolo rispetto agli avvolgimenti statorici.
Dal punto di vista delle equazioni avremo:
% = +% H);.H)I
% = +% H);.*@I
Con I angolo formato tra gli avvolgimenti rotorici e gli avvolgimenti statorici.
Utilizzando lo schema riportato è possibile da questi ricavare una stima di I.
%3 = % H);.K*@IH)IL − H)I*@ILM = % H);. sin I − IL
Il blocco Dem elimina la pulsazione del segnale ; e si ottiene:
%4 = % sinKI − ILM ≅ % I − IO Lo schema equivalente è quindi :
R
PQ + S 1
Q + R
IL =
I= I
R
+
Q
+
R
PQ + S 1
1+
La banda può essere scelta liberamente modificando P e I.
Il resolver permette di conoscere I ma anche IT (è sufficiente prendere il segnale a monte
dell’integratore)
Encoder
L'encoder è un sensore di posizione molto accurato, ed economico, basti pensare che i
primi mouse a rotella ne implementavano una coppia per rilevare i movimenti XY sul piano
del mousepad.
Un sensore encoder di tipo differenziale utilizza due coppie di switch optoelettronici per
generare delle onde di riferimento della posizione. Il sensore è costituito da un disco
perforato come illustrato in figura, e da due coppie allineate di fotoemettitori, fotorilevatori
per analizzare il passaggio (la rotazione) delle tacche del disco.
Lo svantaggio degli encoder differenziali è che non esiste modo di conoscere la posizione
del motore rispetto ad un sistema di riferimento assoluto senza introdurre alcun riferimento
esterno, a tal fine esistono due tipologie di soluzioni: 1. prevedere un riferimento, un
microswitch o una battuta meccanica che possa essere utilizzata sempre come posizione
di azzeramento del nostro sensore; 2. utilizzare un encoder differenziale a tre canali che al
suo interno prevede, una volta per angolo giro, un segnale sul terzo canale in grado di
dare il riferimento di zero.
E' ovvio che il disco aprirà e chiuderà i circuiti relativi ai fotorilevatori ogni volta che una
tacca passerà davanti al circuito di rilevazione. Detto N il numero di tacche dell'encoder, i
due circuiti di rilevazione sono quindi sfasati di un angolo pari a 360/(4*N), ovvero se
360/(2*N) è l'angolo relativo alla dimensione di una tacca, sono sfasati di metà di questo
angolo.
In questo modo le onde risultanti da una rilevazione risultano sfasate tra di loro così come
mostrato in figura. Vediamo di analizzarne il comportamento:
Supponiamo di voler scrivere un programma per la rilevazione dei movimenti del nostro
motore. Il principio di rilevazione è basato sul conteggio del numero di impulsi rilevati dai
fotorilevatori. Esistono quindi almeno tre tecniche di ricostruzione denominate X1, X2 e
X4. Di seguito considereremo la tecnica X4. Per poter sapere se si è avuto uno
spostamento relativo e la direzione dello spostamento è necessario analizzare i valori dei
canali A e B al passo precedente. Possiamo dunque costruire una tabella delle verità che
ci permetta di identificare il verso di spostamento. In particolare potremo avere 4 casi
come riportati in tabella: un incremento in direzione oraria, un incremento in direzione
antioraria, una situazione di non movimento o una condizione che identifica una perdita di
informazioni. In quest’ultimo caso vorrà dire che la nostra routine di calcolo non è
abbastanza veloce da leggere correttamente le transizioni da una tacca all’altra ovvero
abbiamo mal dimensionato il nostro hardware di lettura.
A B
Ao Bo incremento
0
0
0
0
0
0
0
0
1
+1
0
0
1
0
-1
0
0
1
1
X
0
1
0
0
-1
0
1
0
1
0
0
1
1
0
X
0
1
1
1
+1
1
0
0
0
+1
1
0
0
1
X
1
0
1
0
0
1
0
1
1
-1
1
1
0
0
X
1
1
0
1
-1
1
1
1
0
+1
1
1
1
1
0
Supponiamo che i valori dei segnali dei canali A e B siano passati al nostro programma in
una coppia di variabili:
int Pos = 0;
byte A, B;
byte oldA, oldB;
byte deltamov[16] = { 0, +1, -1, x, -1, 0, …};
while (1){
read(&A, &B);
Pos += deltamov[A<<3 +B<<2 +oldA<<1 +oldB];
oldA=A;
oldB=B;
}
Un circuito di lettura di un encoder incrementale realizzato in hardware è invece così
costituito:
Oltre agli encoder differenziali esistono anche una categoria di encoder denominati
assoluti, in grado cioè di trasmettere non solo due segnali per ogni posizione del motore
ma una n-upla di segnali la cui combinazione indica in digitale la posizione angolare esatta
del motore.
La figura riporta un encoder assoluto a 3 strisce con codifica Gray. La sua risoluzione sarà
dunque 360° / 2^3 = 45 °. Si possono avere encoder assoluti con qualsiasi codifica ma si
preferisce utilizzare la codifica Gray che garantisce che tra una tacca e le tacche adiacenti
ci sia una differenza di un unico bit di informazione.
Esistono anche delle interfacce integrate per la ricostruzione del comportamento
dell'encoder e la conversione in un segnale ad impulsi con segno (che come vedremo in
seguito risulterà utile per le logiche dei microcontrollori). Nella figura seguente viene
mostrata la connessione con un dispositivo prodotto dalla mLS.
Esistono ancora due tipologie diverse di encoder, quelli denominati single ended, aventi
una massa comune ed una uscita di tipo TTL e quelli differenziali, in grado di produrre un
output elettrico su due linee e quindi di resistere meglio ai rumori ambientali.
Gli encoder magneto ottici somigliano per costruzione agli encoder ottici ma a differenza di
questi ultimi generano un segnale tramite un sistema di polarizzazioni magnetiche NS del
disco rotante e di una coppia adeguatamente sfasata di rilevatori ad effetto Hall.
I sensori ad effetto Hall funzionano sul fenomeno fisico che denomina lo stesso sensore.
Si ottiene un effetto Hall quando una piastra metallica percorsa da corrente (cella di Hall)
viene attraversata da un campo magnetico perpendicolare ad essa determinando una
differenza di potenziale ai capi opposti della piastra (tensione Hall). L’effetto si può
spiegare nel seguente modo: il campo magnetico, perpendicolare al moto delle cariche, fa
si che esse vengano deflesse dal loro originario cammino rettilineo determinando una
disuniformità nella loro distribuzione.
Il vantaggio rispetto agli encoder ottici consiste nella maggior precisione che si può avere
interpolando le semionde di uscita (questa volta continua), ma a loro volta essi soffrono
maggiormente i disturbi elettromagnetici di tipo ambientali. Inoltre l’ attuale precisione
raggiunta dai processi ottico/fotografici (non più meccanici) consente di realizzare encoder
ottici a risoluzioni centinaia di volte superiore a quella degli encoder magnetici, riducendo
cosi commercialmente il ricorso a questo tipo di tecnologia.
Sensori ad ultrasuoni
I sensori di posizione ad ultrasuoni si basano sulla tecnica del tempo di volo. Essa
consiste nel misurare il tempo impiegato da un impulso acustico o da un’onda acustica ad
alta frequenza a percorrere lo spazio tra un trasmettitore ed un ricevitore.
Quindi, conoscendo la velocità con cui l’onda acustica si propaga nel mezzo interposto tra
i trasduttori ultrasonici e l’oggetto di cui si vuole misurare la posizione, si può calcolare la
distanza dell’oggetto:
=
H . .
2
Con: c = velocità del suono nel mezzo,
t = tempo di volo misurato,
d = distanza dell’oggetto rispetto ai trasduttori.
Solitamente il trasmettitore e il ricevitore sono sensori piezoelettrici che funzionano ad
impulso o ad onda continua. In questi casi un cristallo di quarzo, posto in vibrazione,
emette un treno di impulsi a elevata velocità. L’emettitore e il ricevitore possono trovarsi
nello stesso contenitore o in contenitori diversi. Considerando il caso in cui ricevitore ed
emettitore siano nello stesso contenitore, se non è presente un oggetto nel campo di
intervento, il treno di impulsi si perde nell’aria, mentre se l’oggetto è presente il treno di
impulsi viene riflesso e rilevato dal ricevitore che lo converte in un segnale elettrico. Se,
invece, ricevitore ed emettitore sono in contenitori separati e non c’è nulla nel campo di
intervento il treno di impulsi arriva senza interruzioni al ricevitore, nell’altro caso (cioè è
presente un oggetto nel campo di misura) il treno di impulsi viene interrotto e cessa quindi
il segnale elettrico in uscita. Alcuni materiali che riflettono gli ultrasuoni sono, per esempio,
tutti gli oggetti metallici, il legno, la plastica e i liquidi. Alcuni materiali invece come la
gommapiuma assorbono gli ultrasuoni. Per questi tipi di materiali viene installato nel lato
opposto al sensore uno schermo riflettente. Quindi in assenza di oggetti è lo schermo ad
essere rilevato mentre quando passa un oggetto, come la gommapiuma, gli impulsi
sonori vengono assorbiti e non vengono più ricevuti.
I sensori ad infrarossi hanno funzionamento analogo ma invece di utilizzare informazioni
sonore utilizzano particolari frequenze ottiche.
Sensori di velocità
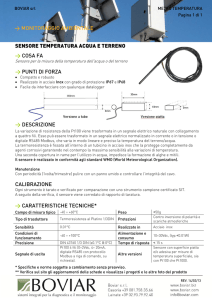
Dinamo
Le dinamo tachimetriche sono sensori analogici che misurano e regolano la velocità. La
loro caratteristica, e la loro funzione fondamentale è quella di fornire un’accurata immagine
della rotazione, indicando simultaneamente la velocità istantanea, la variazione di velocità,
il passaggio per il punto di zero e la direzione di rotazione.
Le qualità principali della dinamo tachimetrica sono: proporzionalità rigorosa tra la
tensione di uscita e la velocità di rotazione in entrambi i sensi di rotazione, stabilità del
segnale nel tempo e al variare della temperatura.
Costruttivamente la dinamo tachimetrica è costituita da uno statore, che contiene degli
induttori a magnete permanente, e da un rotore, composto di un circuito magnetico con un
numero elevato di cave rotoriche. Per un ottimo funzionamento il collettore viene rifinito
con utensili al diamante e le spazzole vengono provate e rodate prima della taratura, per
avere un buon contatto tra spazzola e collettore.
L’equazione che ne descrive il funzionamento (analoga a quella del motore DC) è:
% = * + =
*
+ V
.
Dove E rappresenta la forza controelettromotrice ed è proporzionale alla velocità.
Anche gli encoder possono essere utilizzati per misurare la velocità contando il numero di
impulsi in un intervallo di tempo.
Sensori di accelerazione
Nella maggior parte degli accelerometri, il principio di funzionamento è il medesimo: si
basa sulla rilevazione dell'inerzia di una massa quando viene sottoposta ad una
accelerazione.
La massa viene sospesa ad un elemento elastico, mentre un qualche tipo di sensore ne
rileva lo spostamento rispetto alla struttura fissa del dispositivo. In presenza di
un'accelerazione, la massa (che è dotata di una propria inerzia) si sposta dalla propria
posizione di riposo in modo proporzionale all'accelerazione rilevata. Il sensore trasforma
questo spostamento in un segnale elettrico acquisibile dai moderni sistemi di misura.
Una prima classificazione si può così fare suddividendo questi strumenti a seconda del
principio di funzionamento del sensore di posizione.
L'accelerometro a ponte estensimetrico sfrutta come principio di rilevazione lo stesso
delle celle di carico, cioè la variazione di resistenza di un estensimetro dovuta alla
variazione della sua lunghezza.
L'accelerometro a ponte piezoresistivo è una variante dell'accelerometro a ponte
estensimetrico, dove al posto degli estensimetri sono utilizzati sensori piezoresistivi.
Questi sensori si comportano in modo analogo agli estensimetri, ma permettono
allungamenti e sensibilità superiori, pur avendo qualche problema di stabilità con la
variazione di temperatura.
L'accelerometro LVDT sfrutta, come principio per la rilevazione dello spostamento della
massa, un sensore LVDT (Linear Variable Differential Transformer) integrato nella
struttura dell'accelerometro stesso.
L'accelerometro capacitivo sfrutta, come principio per la rilevazione dello spostamento
della massa, la variazione della capacità elettrica di un condensatore al variare della
distanza tra le sue armature.
L'accelerometro piezoelettrico sfrutta, come principio per la rilevazione dello
spostamento della massa, il segnale elettrico generato da un cristallo piezoelettrico
quando è sottoposto ad una compressione.
L'accelerometro laser è un tipo particolare d'accelerometro, usato quando è necessario
effettuare misure estremamente precise, non ottenibili con altri tipi di strumenti. Il principio
di funzionamento è concettualmente differente rispetto a quelli sopra esposti, e si basa sul
principio fisico che l'accelerazione è una derivata della velocità nel tempo.