Sensori di velocità e posizione
Sensori Ad effetto Hall
Prof. Mario Luciano
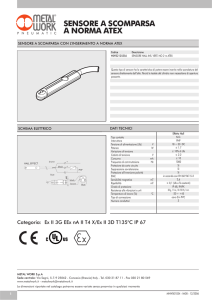
Principio di Funzionamento
•Applico una tensione continua, essa promuove un flusso di
elettroni uniforme dal punto A verso il punto B.
Senza la presenza di un magnete esterno
•Tra due punti estremi di una sezione trasversale
del conduttore (C - D) no vi è differenza di potenziale.
•L'indice del voltmetro, infatti, rimane fermo sullo zero centrale.
In presenza di un magnete esterno
•Tra due punti estremi di una sezione trasversale
del conduttore (C - D) vi è differenza di potenziale.
•Il flusso di elettroni subisce una deviazione dal percorso
rettilineo, con un certo ammassamento verso il punto D ed un
diradamento nella zona prossima al punto C.
Il risultato elettrico più appariscente è quello della presenza
di una tensione, fra i punti C - D, segnalata dall'indice del voltmetro.
Invertendo le polarità del magnete, anche il corrispondente
concentramento di elettroni e la deviazione dell'indice dello strumento
si invertono.
Con il risultato che il punto C è questa volta più
negativo del punto A e l'indice del voltmetro flette verso i valori positivi.
SENSORI HALL CON USCITA
ANALOGICA
Il circuito stabilizzatore e regolatore ”STAB”, provvede ad alimentare,con una corrente rigorosamente compensata,
quasi costante e indipendente dalla tensione di alimentazione, ovviamente entro i limiti di tolleranza,
l'intero circuito del sensore integrato.
Ciò è molto importante per l'effetto Hall, dato che correnti diverse darebbero origine a differenti tensioni.
L'amplificatore operazionale AMPL agisce direttamente sulla tensione di Hall.
Ed è collegato in modo differenziale, ossia rimane sensibile soltanto alla differenza tra le tensioni presenti sulle facce
opposte del sensore, non al loro valore comune.
Con questo sistema, l'uscita dell'amplificatore operazionale è condizionata esclusivamente
dalla tensione di Hall.
Il segnale uscente dall'amplificatore è sufficientemente ampio per non sollevare problemi di collegamento e cablaggio
e per essere pronto all'elaborazione tramite normali circuiti analogici ed anche logici.
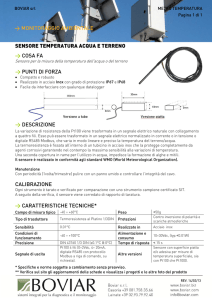
SENSORI HALL CON USCITA DIGITALE
L'uscita dell'amplificatore operazionale è collegata con un
comparatore dotato di soglia fissa,
denominato ELABORATORE ON-OFF, che scatta e varia il livello
della sua uscita,
quando il campo magnetico e, di conseguenza, l'uscita
dell'amplificatore operazionale, supera la soglia.
L'uscita del comparatore, come si può notare in figura, agisce su
un transistor NPN di commutazione, che fornisce la corrente
necessaria per pilotare tutti i normali carichi dei circuiti logici.
Quando TR è saturo,
fornisce un livello zero pari ad alcune centinaia di millivolt o
meno, a seconda del carico,
compatibile con le comuni famiglie logiche.
L'uscita del transistor TR è di collettore, "open-collector",
cioè a collettore libero, in modo da consentire l'adattamento
con ogni tipo di circuito relativa tensione di alimentazione,
tenendo conto che è possibile variare
l'alimentazione del SEH e della logica entro ampi limiti.
L'uscita di collettore di TR permette pure il cosiddetto
wired-or o funzione logica di tipo OR , molto
comoda in tutti quei casi in cui si deve
raccogliere, su un unico ingresso, il segnale
proveniente da molti sensori.
Lo schema riportato nella figura in basso illustra una
possibile applicazione dei sensori di Hall ora descritti.
Il valore della resistenza R1 per taluni circuiti TTL,
può essere abbassato a 2.200 ohm.
Polarità
Dati del circuito di prova
•SEH UGN 3501T
•VCC è di 9 V
•R1 = 1.000 ohm
•R2 = 470 ohm (trimmer)
•R3 = 1.000 ohm
In assenza di campi magnetici, va regolato in modo che
l'indice del micro-amperometro uA, da 50 - 100 uA,
raggiunga il centro scala. Subito dopo possono iniziare
gli esperimenti, avvicinando il magnete permanente da
una parte e dall'altra, con le stesse polarità e con le
polarità invertite, per accertare la veridicità di quanto
prima affermato.
Alcuni dei sensori di Hall presenti in commercio reagiscono sotto
l'influsso del polo SUD del magnete permanente, altri in presenza del
polo NORD. Rivolgendo il campo magnetico verso la faccia del SEH sulla
quale è visibile la sigla di riconoscimento. Tuttavia, il sensore di Hall
funziona anche quando il campo magnetico lo investe sulla faccia opposta
a quella in cui è impressa la sigla. Facciamo un esempio chiarificatore e
supponiamo di realizzare l'esperimento riportato nella figura in basso, nel
quale il SEH reagisce soltanto quando il polo SUD del magnete è rivolto
verso la faccia del sensore in cui si legge la sigla, mentre non segnala
alcuna reazione se il magnete inverte le sua polarità.
Ora, se si sposta il magnete sulla parte opposta del sensore, ma con il
polo NORD rivolto verso il SEH, questo reagisce, rimanendo invece inerte
se le polarità vengono invertite. Comunque tutto dipende dal modello di
sensore con cui si ha a che fare, ovvero se questo è del tipo ad uscita
logica (on-off) o lineare..
Alcune Semplici Applicazioni
Questi due esempi costituiscono, forse, le più
immediate e vantaggiose delle pratiche
applicazioni dei sensori Hall; dato che
consentono, in modo semplice ed economico, la
misura della velocità di una ruota magnetizzata,
o il numero di giri da questi compiuti. Poiché
ogni volta che la ruota espone la tacca al
sensore Hall, il campo magnetico varia e
variano le reazioni del SEH.
In questo caso, il flusso magnetico è
proporzionale alla corrente che scorre
nell'avvolgimento, sia questa alternata o continua.
Dunque, con tale sistema, è facile tenere sotto
controllo il valore della corrente in gioco
nell'elettromagnete.
Posizione albero Motore
• Lato Trasmissione
•Lato Distribuzione
Posizione albero a Camme
Misure Sperimentali
Esempio di segnale in uscita da un sensore di fase ad effetto hall. Ad ogni periodo
completo di sinusoide corrisponde il passaggio di un dente della ruota fonica...
Misure Sperimentali
In quest'altra immagine si può vedere chiaramente il dente mancante della ruota fonica
dove ho il sincronismo... infatti in quel punto ho un segnale di maggior durata e tensione...
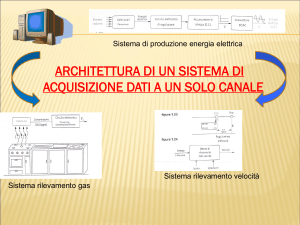
ABS
Perché implementare l’ABS
• Fermare un'auto in marcia su un fondo a basso
coefficiente di attrito non è per nulla facile
neanche per i grandi piloti di rally abituati a
correre su qualunque fondo, dal fango al ghiaccio,
alla sabbia e così via, figuriamoci per noi guidatori
"normali".
• In un'auto senza Abs ottenere l'arresto della
medesima su fondo scivoloso senza innescare
sbandate e testa coda significa essere dotati di
grande esperienza di guida.. Con l'Abs invece
l'impresa riesce praticamente a tutti.
Modalità di Funzionamento
• Innanzitutto l'Abs ha bisogno di sapere se le ruote stanno girando
o se una si sta fermando. Ciò è reso possibile dalla"ruota fonica“.
• I denti metallici della ruota fonica passando davanti ad un sensore
generano un segnale che permette alla parte elettronica di capire a
che velocità sta ruotando il mozzo e quindi gestire il tutto. Occorre
poi una centralina e una pompa particolare capace di bilanciare la
frenata di ogni singola ruota.,perché quando noi premiamo il
pedale del freno, l'auto inizia a rallentare, ma se il fondo è ineguale
una o più ruote tenderanno a bloccare.
• E qui interviene la centralina, la ruota fonica di una ruota si ferma e
quindi la centralina capisce che deve intervenire aprendo una
valvola, al suo interno, che scarica la pressione sulla pinza freno
della ruota bloccata che riprende a girare, la centralina si accorge
che la ruota ha ripreso a girare e ridà pressione al freno ed il ciclo
riprende e così via con tutte e quattro le ruote. Tutto questo
avviene fino a 15/20 volte al secondo.
Componenti Fondamentali ABS
• Giunto con
Ruoto fonica
• Pompa ABS
• Sensore effetto Hall
Encoder di velocità
Gli encoder sono sensori digitali i quali forniscono una rappresentazione numerica di
spostamenti lineari o di rotazioni angolari .
I dispositivi lineari forniscono una misura nel caso di spostamenti rettilinei mentre i
dispositivi rotativi forniscono una misura diretta di spostamenti angolari .
TIPOLOGIA DI ENCODER ANGOLARI
Gli encoder angolari si suddividono in due tipologie:
INCREMENTALI: quando i segnali d'uscita sono proporzionali in modo incrementale
allo spostamento effettuato
ASSOLUTI: quando ad ogni posizione dell'albero corrisponde un valore ben definito
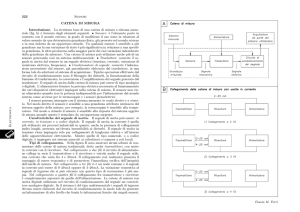
Un encoder incrementale è composto da 3 parti principali:
1. Un disco, generalmente di plastica ed è calettato sull’albero dell’organo da
controllare. Questo disco è suddiviso in zone trasparenti e zone opache
2. Fotoemettitori danno il segnale di input attraverso un segnale luminoso che
passa nelle zone trasparenti del disco di plastica
3. Fotorilevatore che riceve il segnale luminoso e che a sua volta invierà un
segnale di output ( stato logico 1 se passa la luce, stato logico 2 se non passa)
Gli encoder hanno il vantaggio di poter essere realizzati in modo accurato, di
avere elevate velocità di lettura e trascurabili forze di reazione verso il movimento
dell’albero mobile.
Lo spostamento angolare è dato dalla seguente
relazione:
Spostamento angolare (φ) = 360° / numero di
fori dell’encoder
Per determinare il verso di rotazione l’encoder presenta una seconda identica pista
ma sfasata di un quarto di passo
La sfasatura del foro B come in figura mi permette di stabilire se per ogni
incremento B commuta prima (verso antiorario) o dopo del foro A (verso orario) e
quindi stabilire il verso di rotazione del dispositivo
PROBLEMATICHE DI COSTRUZIONE
I fori presenti sulla ruota devono essere confrontabili con la lunghezza dell’onda
del laser incidente. I fenomeni di diffrazione e l’imprecisione dei fori possono
limitare la massima risoluzione dell’encoder.
Per migliorare la risoluzione ci sono 2 metodologie:
- Sistema stigmatico (convergente)
- Sistema collimato
SISTEMA STIGMATICO
SI usano due lenti biconvesse opposte rispetto al disco . SI pone l’emettitore su un
fuoco della lente e un foro del disco sull’altro fuoco, lo stesso metodo anche dalla
parte del rilevatore.
La luce passa dalla zona del ricevitore solo in corrispondenza dei fori. In questo
modo si riduce il contrasto di modulazione , non vi è sovrapposizione cioè tra due
fasci di luce rilevati ad ogni scatto dell’albero.
SISTEMA COLLIMATO
Si utilizzano due lenti biconvesse entrambe dalla parte del ricevitore .
Le lenti trasformano il raggio proveniente dall’emettitore in un fascio di raggi paralleli.
Il risultato è che nel foro presente nel disco passa solo il fascio di luce strettamente
necessario e perfettamente perpendicolare per far commutare il ricevitore.
ENCODER ASSOLUTO
Il disco è suddivisibile in settori che vanno a comporre un codice (binario oppure
Gray). Il disco è suddiviso in n corone circolari e in 2^n settori.
Ogni settore avrà n aree che a seconda se opacizzate o trasparenti
corrisponderanno a 1 logico o zero logico.
Vantaggio: da informazioni che non vengono perdute in caso di mancanza di
alimentazione
Svantaggio: più costoso di quello incrementale e non è adatto ad effettuare misure
di velocità
APPLICAZIONE ENCODER INCREMENTALE : MOUSE A SFERA
Il mouse a sfera è il classico esempio di encoder incrementale: la rotazione della sfera
permette la rotazione di due alberi in quadratura per il rilevamento degli spostamenti
sul piano. Su ogni alberino è calettato un encoder incrementale che monta sulla stessa
pista due gruppi di fotocellule sfalsate di un quarto di passo cosi da determinare il
senso di rotazione della sfera
Componenti:
1- sfera
2- albero di rotazione
3- disco
4- emettitore
5- ricevitore
DATASHEET ENCODER MOUSE
Resolver
Strumenti di misura : posizioni e
velocità di alberi
Trasduttori induttivi
Il resolver è un tipo di trasduttore di spostamento
induttivo, dispositivo elettromeccanico per la misura
di spostamenti angolari che consente di rilevare la
variazione di flusso di induzione magnetica,
concatenato con un solenoide, in funzione della
posizione del solenoide stesso. Alimentato in
corrente alternata, è un dispositivo analogico.
Funzionamento
Il principio di funzionamento del Resolver si basa sulla variazione
dell’accoppiamento (di tipo trasformatorico) tra due sistemi di
avvolgimenti elettrici ruotanti l’uno rispetto all’altro.
.Sensori di
posizione di tipo induttivo
Andamenti di output
Un Resolver, comprende un avvolgimento di rotore (circuito primario,
portante o Generatore) e due avvolgimenti di statore (circuiti secondari o
Rivelatori) posizionati in modo da avere i loro assi di simmetria sfasati di
90° elettrici.
Tensioni di output
La tensione su primario è:
allora le tensioni indotte sui secondari sfasati fra di loro di 90° valgono:
Dove θ l’angolo relativo tra il circuito di rotore e quello di statore e K è una costante di
proporzionalità dipendente da parametri costruttivi del sensore.
Le due tensioni di uscita risultano pertanto modulate sinusoidalmente con la posizione
ed in quadratura tra loro.
Caratteristiche
Il sensore fornisce come segnale di uscita una coppia di
tensioni alternate caratterizzate da:
Pulsazione pari a quella del segnale applicato al circuito
primario;
Ampiezza dipendente dalla posizione del rotore ed in
quadratura reciproca;
Fase concorde rispetto alla tensione impressa sul primario;
Grazie alla presenza dei due circuiti di statore sfasati di 90°,
il resolver fornisce la posizione assoluta dell’asse rotante
all’interno di un giro.
Funzionamento
•
Questo trasduttore è formato da due avvolgimenti distinti, uno fisso (statore) e
l’altro mobile (rotore), disposti attorno ad uno stesso nucleo di ferro, fatto di
lamierini isolati; in base alle loro posizioni reciproche il flusso magnetico sul
secondo solenoide risulta quindi concatenato totalmente o solo parzialmente col
primo. Ai capi dell’avvolgimento secondario, quindi, si ha una tensione avente
ampiezza diversa in funzione del disallineamento dei due elementi elettrici: è
facilmente comprensibile quindi che il campo di misura di un resolver formato da
un solo elemento fisso e da uno solo mobile sia di 180 gradi; nei trasduttori più
comuni sono presenti due solenoidi statorici e due rotorici, in modo da ampliare il
campo di misura a 360 gradi, ma spesso non basta.
Migliorare la risoluzione
Nei sensori di posizione di tipo induttivo esistono realizzazioni con p coppie di espansioni
polari in cui il sensore fornisce la posizione assoluta all’interno di un giro elettrico, a cui
corrispondono 1/p giri meccanici. Tale soluzione consente di ottenere una maggiore
risoluzione del sensore.
Tipi di misurazioni
•
•
•
•
spostamenti angolari, quando, il rotore è collegato su un asse, viene usato per
rilevare direttamente la posizione angolare di quest'ultimo;
conversione di coordinate polari/cartesiane, alimentando lo statore con tensioni
pari alle coordinate cartesiane è possibile misurare il valore dell'angolo di
rotazione ottenuto (da cartesiano a polare) e viceversa.
rilevamento di errori d'angolo, nota una posizione angolare del rotore e usando un
solo avvolgimento statore, tramite una coppia di resolver si rileva un errore
nell'allineamento.
Questi trasduttori, per la loro vastissima gamma di modelli, sono validamente
applicati in tutto il mondo su: controlli di processo industriale, robot industriali,
macchine utensili, strumenti di misura, plotter.
Pregi:
•
La sua struttura è particolarmente robusta, in maniera tale da garantire una vita
media del meccanismo abbastanza lunga ed è poco sensibile ad urti e vibrazioni.
Può quindi essere utilizzato in impianti industriali in condizioni di lavoro difficili.
Campi d’impiego
•
•
L’abbinamento dei Resolver interfacciati con
l'unità di controllo del calcolatore sono in
grado di verificare se sono state effettuate
correttamente tutte le lavorazioni
programmate.
Nel caso di una semplice lavorazione come
una tornitura da un punto A ad un punto
B(distanza di 50mm) grazie all’interfacciarsi
del segnale del Resolver (distanza istantanea
dell’utensile) e il segnale del comparatore
(distanza prefissata). Il calcolatore verificherà
se la differenza tra i segnali sarà =0 nonché la
tornitura di 50mm è stata eseguita
correttamente e quindi il cnc provvederà a
ritornare in posizione con i servomeccanismi ,
in caso contrario viene dato un valore diverso
da 0 che determina l'attivazione
dell'azionamento del mandrino dell'utensile
eseguendo nuovamente la lavorazione.
Caratteristiche
•
•
•
Errore di linearità:
da 0.1 % a 0.5 %;
Ampiezza del campo di misura:
l’informazione è assoluta solo nell’ambito del giro elettrico, può comunque compiere
infinite rotazioni;
Frequenza della tensione di alimentazione: da 500 Hz a 20Khz
Il Resolver è un sensore di posizione molto affidabile, abbastanza preciso, non troppo
costoso, in grado di essere applicato su sistemi in rotazione continua, trova attualmente la
sua massima applicazione come sensore di posizione del rotore negli azionamenti ad alte
prestazioni con motori AC.
La sua robustezza, la tecnologia elettromagnetica simile a quella realizzativa di un motore e
la relativa insensibilità agli sbalzi di temperatura lo rendono idoneo all’integrazione
all’interno del motore stesso, favorendo così la compattezza e la riduzione dei costi
dell’insieme.
Progettazione…
• Banco prova motori
Come tradurre e leggere le potenze e coppie generate da un motore …
Si è deciso per semplicità strutturale di creare un banco prova inerziale.
Con la prova al banco di tipo inerziale, si sfrutta la massa del rullo e l’accellerazione
impartitagli dal mezzo in prova determinandone la coppia motrice e la potenza
massima prodotta dal motore.
Il nostro scopo è stato quello di riuscire a capire e comparare le prestazione dei nostri
motori al variare dei vari componenti.
Il primo passo è stato determinare un range di potenze misurabili, per poterne
calcolare la massa e il diametro del rullo da utilizzare , in base alle nostre
caratteristiche, il peso del rullo è stato determinato per una potenza massima di
70cv .
Encoder utilizzato
Per rilevare dei dati sull’albero del rullo abbiamo deciso
da applicarvi un encoder il cui compito è quello di
fornire un treno di onde quadre proporzionali alla
velocità dell’albero su cui è calettato.
Scheda e programma
• Per semplicità costruttiva e precisione di
lettura abbiamo deciso di acquistare un
programma per analizzare il segnale
dell’encoder e tradurlo in curve motore.
• A priori di ogni prova è necessario settare il
segnale dell’encoder con il tempo di lettura,
ogni prova sarà in funzione del tempo ,
temperatura e diametro della ruota.
Prova a banco..
Diagrammi di output
Test di Comparazione
Grazie per l’attenzione!