L. Taponecco
-
Appunti di Meccatronica
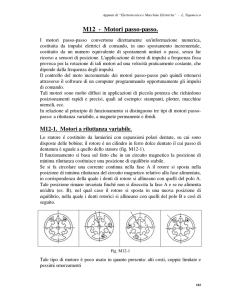
Cap. VIII AZIONAMENTI PASSO-PASSO.
VIII-1. Introduzione.
Il controllo del moto incrementale dei motori passo-passo si ottiene attraverso il
software di un computer, programmando opportunamente gli impulsi di comando,
generalmente senza la necessità di anelli di retroazione (fig. VIII-1a). Solo nei casi in
cui il rischio di perdere il passo in catena aperta non è accettabile, in quanto può
comportare gravi danni o pericolo delle persone è necessario un anello di retroazione
realizzato con un encoder, montato sull'albero del motore, il cui segnale digitale
fornisce al microprocessore la posizione (fig. VIII-1b).
Gli azionamenti passo-passo sono costituiti da:
- un'unità di controllo (µP) che definisce le modalità di funzionamento del sistema,
- un blocco logico che converte le informazioni dell'unità di controllo in comandi
logici temporizzati,
- un convertitore statico che in base ai segnali di comando provvede alla corretta
alimentazione del motore,
- un motore passo-passo che effettua la conversione elettromeccanica dell'energia,
Fig. VIII-1a
Fig. VIII-1b
302
L. Taponecco
-
Appunti di Meccatronica
Quando la frequenza degli impulsi uguaglia la frequenza di risonanza naturale del
motore, che varia con il carico ed è tipicamente compresa tra i 70 ed i 120 passi al
secondo, si verifica variazione di rumore acustico, incremento delle vibrazioni e
possibile perdita del passo.
Caratteristiche peculiari degli azionamenti passo-passo sono:
- possibilità di realizzare un controllo di posizione ad anello aperto e di mantenere il
rotore in una posizione di equilibrio stabile senza dispositivi di retroazione
(necessari invece negli azionamenti con motori cc, asincroni e brushless), e
conseguentemente minori complicazioni e costi;
- elevata rapidità e precisione di posizionamento;
- alto rapporto coppia/inerzia;
- ridotte dimensioni, vibrazioni e rumore.
In relazione alle loro eccezionali prestazioni tali azionamenti sono largamente usati
per generare moti incrementali in applicazioni di piccola potenza (P<1 kW, e C<1520 Nm) che richiedono posizionamenti veloci e precisi, quali robotica, macchine a
controllo numerico, stampanti, orologi elettronici, strumenti scientifici, ecc.
La maggior parte delle servo-applicazioni degli azionamenti passo-passo ricadono in
una delle seguenti tre categorie:
- posizionamenti punto-punto; obiettivo primario è muovere il carico da un punto ad
un altro nel modo più rapido e preciso possibile; in questo caso sono richieste elevate
accelerazioni/decelerazioni, precisione di posizionamento, rapido smorzamento delle
oscillazioni e tempo di fermata minimo;
- applicazioni a percorso controllato; obiettivo primario è ridurre al minimo l'errore
tra il percorso desiderato e quello realizzato; il carico viene mosso lungo un percorso
da due o più motori controllati contemporaneamente, per ottenere tale scopo occorre
un buon controllo della velocità ed una buona precisione di posizionamento;
- applicazioni a velocità controllata; in generale si cerca di ottenere un movimento a
velocità costante, per cui la eliminazione dei disturbi rappresenta l'obiettivo
primario; in questo caso si richiedono elevate coppie acceleranti e basse fluttuazioni
della velocità a regime.
In figura VIII-2 sono riportati gli schemi di pilotaggio bipolare e unipolare relativi ai
motori passo-passo a magneti permanenti e ibridi e le corrispondenti successioni
delle configurazioni dei tasti.
La natura induttiva degli avvolgimenti richiede che esista sempre un percorso per la
corrente, pertanto in antiparallelo ad ogni transistore dei circuiti di pilotaggio è
disposto un diodo per permettere alla corrente di fluire in entrambe le direzioni
attraverso il tasto.
Il circuito di pilotaggio unipolare ha un numero di tasti metà di quello bipolare, ma i
relativi transistori devono essere dimensionati per una tensione molto più alta della
tensione nominale di alimentazione a causa dei grandi transitori di tensione (almeno
il doppio della tensione di alimentazione) che si verificano durante le commutazioni.
303
L. Taponecco
-
Appunti di Meccatronica
Fig. VIII-2
In figura VIII-3 sono riportati i percorsi e gli andamenti nel tempo della corrente nel
caso di pilotaggio bipolare quando si attivano due transistori diagonali (1), quando si
disattiva uno dei due transistori in conduzione (2) e quando si disattivano entrambi
(3).
Fig. VIII-3
304
L. Taponecco
-
Appunti di Meccatronica
VIII-2. Controllo ad anello aperto e chiuso.
La demoltiplicazione magnetica della velocità del rotore rispetto a quella del campo
ruotante è una caratteristica tipica del motore passo-passo, che gli permette di
definire un numero elevato di passi/giro. Questa particolarità lo rende però più
sensibile a perturbazioni e risonanze meccaniche che possono apparire nella catena
cinematica a valle del motore. Infatti leggeri scarti della posizione del rotore, mentre
sta funzionando a velocità sincrona, provocano grandi perturbazioni a livello di
angolo elettrico e quindi di coppia sviluppata e la natura sincrona della coppia
dinamica sviluppata impone di evitare nelle fasi di accelerazione e di frenatura di
richiedere al motore coppie superiori a quelle che può fornire. Inoltre anche le coppie
pulsanti dovute all'alimentazione ricca di armoniche di questi motori contribuiscono
alla loro instabilità naturale. Le effettive curve di pull-out presentano infatti, in molti
casi, depressioni (fig. VIII-4).
Questi fenomeni limitano notevolmente le prestazioni degli azionamenti passo-passo
ad anello aperto, in quanto l'utilizzatore, per cautelarsi dalla possibilità che si
verifichi una perdita di sincronismo, è in pratica costretto ad adottare notevoli
margini di sicurezza col risultato di non sfruttare a pieno le potenzialità del motore
utilizzando solo una parte della coppia dinamica teoricamente disponibile.
Fig. VIII-4
Nel controllo ad anello aperto è quindi impossibile ottenere le prestazioni ottimali
del motore, in quanto la posizione del rotore all'istante di commutazione non è nota.
Per potere sfruttare a pieno le potenzialità di un motore passo-passo si deve ricorrere
al controllo ad anello chiuso, nel quale l'informazione fornita da un sensore di
posizione, ad alta risoluzione, è utilizzata per generare gli impulsi di comando. In
questo modo è possibile ottimizzare il comportamento del motore in fase di
accelerazione e decelerazione, superare risonanze e instabilità dinamiche del sistema,
tollerare notevoli variazioni di carico e avere un'informazione sicura sul
raggiungimento delle posizioni programmate.
Il metodo introduce però una certa ridondanza, in quanto il carattere sincrono del
motore passo-passo non è più interamente utilizzato; inoltre l'aggiunta del sensore
comporta costi, complessità di realizzazione meccanica ed inerzia maggiori.
305
L. Taponecco
-
Appunti di Meccatronica
VIII-3. Microstepping.
Nel caso di passo intero e di semipasso nelle fasi dei motori passo-passo si ha
corrente nulla o nominale e la sequenza delle varie configurazioni elettriche si ripete
ogni quattro passi interi; pertanto ad ogni cambio di configurazione il vettore
rappresentativo del flusso di traferro, prodotto dalle correnti statoriche, ruota di
360°/4=90° elettrici (nel caso di passo intero) o di 45° elettrici (nel caso di
semipasso) e in modo analogo ruota il rotore, in quanto nei motori passo-passo le
posizioni stabili del rotore sono sincronizzate con il flusso statorico.
La tecnica microstepping, che è applicabile solo ai motori a magneti permanenti e
ibridi, si basa invece sul principio di trasferire gradualmente (anziché bruscamente
come nei casi di passo intero e di semipasso) la corrente da un avvolgimento all'altro,
mediante modulazione della larghezza degli impulsi della tensione di alimentazione.
Essa consente pertanto di suddividere elettronicamente ciascun passo intero in più
micropassi (in genere 4/8/16/32/64) ugualmente spaziati e quindi di aumentare la
risoluzione del motore, diminuendo gradualmente l'intensità della corrente in una
delle due fasi e simultaneamente aumentandola gradualmente nell'altra fase (fig.
VIII-5).
Fig. VIII-5
Fig. VIII-6
Un numero maggiore di 64 micropassi praticamente non migliora le prestazioni,
pertanto nella pratica raramente vale la pena di suddividere ciascun passo in più di
64 micropassi, a cui corrisponde un incremento di 0,12° usando un poco costoso
motore a magneti permanenti con passo di 7,5°.
Utilizzando un riduttore ad ingranaggi con rapporto 1:64 si ottiene la stessa
risoluzione, con il vantaggio di una maggiore coppia e di una maggiore rigidezza di
mantenimento della posizione, ma con lo svantaggio di introdurre dei giochi e di
ridurre la velocità massima, di aumentare costo, ingombro e peso e di ridurre il
rendimento.
Il microstepping viene utilizzato per aumentare la risoluzione angolare (si possono
raggiungere risoluzioni di 25.000 passi/giro), per ottenere una rotazione dell'albero
306
L. Taponecco
-
Appunti di Meccatronica
con transizioni più dolci tra i passi, minimizzando i fenomeni di jerk e quindi di
ondulazione della velocità dopo ogni passo (fig. VIII-6) [i conseguenti transitori
oscillanti (fig. VIII-7) potrebbero anche essere tali da non consentire al rotore di
stabilizzarsi prima che il successivo impulso sia applicato (fig. VIII-8), con
conseguente possibile perdita di passi] e per ridurre rumore acustico, vibrazioni e
problemi di risonanza alle basse velocità (quando il ritmo di passo è uguale alla
naturale frequenza di risonanza) comuni nei sistemi a passo intero.
Fig. VIII-7
Fig. VIII-8
La tecnica microstepping richiede però più potenza di processo, in quanto deve
controllare l'ampiezza delle correnti in entrambi gli avvolgimenti secondo una
appropriata sequenza, mentre nel caso di passo intero e di semi-passo negli
avvolgimenti si ha corrente nominale o nulla.
Fig. VIII-9a
Fig. VIII-9b
Fig. VIII-10
Benché i controllori microstepping consentano una migliore risoluzione,
l'accuratezza di posizionamento di ciascun micropasso presenta un errore
percentualmente maggiore rispetto a quello di un passo intero, a causa di alcuni
fattori inerenti al motore e al controllore che influenzano la linearità del
microstepping. Tra questi uno è costituito dall'attrito statico del sistema (linee
punteggiate di figura VIII-9a), che determina un andamento della coppia sviluppata
da una singola fase caratterizzato da zone morte (fig. VIII-9b) e da una ampiezza
minore di quella del caso ideale. La zona morta ha un impatto non trascurabile sul
307
L. Taponecco
-
Appunti di Meccatronica
microstepping perché limita la risoluzione angolare del motore e rende impossibile
produrre transizioni perfettamente lisce tra i passi (se la zona morta è larga x° il
microstepping con una dimensione di passo minore di x° non può muovere il rotore;
perciò per se si desidera ottenere una alta risoluzione con il microstepping è molto
importante minimizzare l'attrito statico). Un'altra limitazione al microstepping è
dovuta al fatto che, a causa della struttura dentata del rotore e della saturazione,
l'andamento della coppia in funzione della posizione non è perfettamente
sinusoidale.
Pertanto la linea tratteggiata di figura VIII-10 con passi uniformemente spaziati
rappresenta l'andamento ottenibile con un motore ideale, mentre quello relativo ad un
motore reale comporta la posizione attesa ad ogni passo intero e ad ogni semipasso,
ma un significativo errore di posizione nelle posizioni intermedie (linea continua).
Una tecnica utilizzata per il controllo delle correnti è quella seno-coseno; essa regola
le correnti delle due fasi imponendo: ia=Isenθ e ib=Icosθ (con I corrente nominale e θ
angolo di micropasso). In tale caso, in un motore ideale, la coppia prodotta da
ciascun avvolgimento è proporzionale alla relativa corrente e le coppie si sommano
linearmente producendo una coppia risultante costante.
Spesso nella pratica però, per massimizzare la coppia sviluppata, la corrente per metà
passo viene mantenuta costante in una fase e variata sinusoidalmente nell'altra,
quindi nel successivo metà passo la corrente che era stata variata viene mantenuta
costante e quella che era stata mantenuta costante viene variata sinusoidalmente e
così via. Con tale tecnica la coppia sviluppata non si mantiene però costante.
La natura digitale del circuito di controllo del motore pone due limiti addizionali alla
precisione del microstepping. Se i livelli di corrente nelle fasi sono prodotte da dati
digitali, la precisione della conversione analogico-digitale introduce dei problemi.
Inoltre, se le correnti sono stabilite mediante PWM, non appena la velocità (rate) di
passo è prossima alla velocità (rate) degli impulsi usati per il controllo della corrente,
la precisione del sistema di controllo della corrente diventa quasi senza senso.
308