Appunti di “Elettrotecnica e Macchine Elettriche” - L. Taponecco
M12 - Motori passo-passo.
I motori passo-passo convertono direttamente un'informazione numerica,
costituita da impulsi elettrici di comando, in uno spostamento incrementale,
costituito da un numero equivalente di spostamenti unitari o passi, senza far
ricorso a sensori di posizione. L'applicazione di treni di impulsi a frequenza fissa
provoca poi la rotazione di tali motori ad una velocità praticamente costante, che
dipende dalla frequenza degli impulsi.
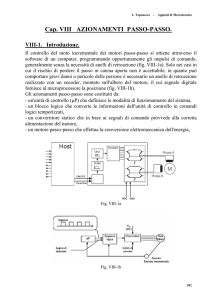
Il controllo del moto incrementale dei motori passo-passo può quindi ottenersi
attraverso il software di un computer programmando opportunamente gli impulsi
di comando.
Tali motori sono molto diffusi in applicazioni di piccola potenza che richiedono
posizionamenti rapidi e precisi, quali ad esempio: stampanti, plotter, macchine
utensili, ecc.
In relazione al principio di funzionamento si distinguono tre tipi di motori passopasso: a riluttanza variabile, a magnete permanente e ibridi.
M12-1. Motori a riluttanza variabile.
Lo statore é costituito da lamierini con espansioni polari dentate, su cui sono
disposte delle bobine; il rotore é un cilindro in ferro dolce dentato il cui passo di
dentatura è uguale a quello dello statore (fig. M12-1).
Il funzionamento si basa sul fatto che in un circuito magnetico la posizione di
minima riluttanza costituisce una posizione di equilibrio stabile.
Se si fa circolare una corrente continua nella fase A il rotore si sposta nella
posizione di minima riluttanza del circuito magnetico relativo alla fase alimentata,
in corrispondenza della quale i denti di rotore si allineano con quelli del polo A.
Tale posizione rimane invariata finché non si diseccita la fase A e se ne alimenta
un'altra (es. B), nel qual caso il rotore si sposta in una nuova posizione di
equilibrio, nella quale i denti rotorici si allineano con quelli del polo B e così di
seguito.
Fig. M12-1
Tale tipo di motore è poco usato in quanto presenta: alti costi, coppie limitate e
pessimi smorzamenti
182
Appunti di “Elettrotecnica e Macchine Elettriche” - L. Taponecco
M12-2 Motori a magnete permanente.
Il rotore è un cilindro di materiale magnetico permanente, che presenta sulla sua
superficie una successione di poli nord e sud. La parte fissa é costituita da due
semistatori cilindrici cavi esattamente identici, realizzati con lamierini
ferromagnetici aventi un numero di poli salienti identico al numero di poli del
rotore, e sfalsati tra loro di mezzo passo polare. Sui poli di ciascun semistatore
sono disposte delle bobine connesse tra di loro in serie in modo da formare un
unico avvolgimento ed avvolte in modo da creare alternativamente polarità
magnetiche nord e sud quando sono percorse da corrente continua (fig. M12-2).
Fig. M12-2
Nelle figure M12-3 e M12-4 sono riportate la successione delle configurazioni
delle correnti nelle due fasi statoriche e delle corrispondenti posizioni angolari del
rotore a seconda che si ecciti una o due fasi per volta.
Fig. M12-3
Fig. M12-4
Principali pregi di questo tipo di motore sono: basso costo ed elevata robustezza;
principali difetti: scarsa precisione e limitate prestazioni in coppia e velocità.
183
Appunti di “Elettrotecnica e Macchine Elettriche” - L. Taponecco
M12-3 Motori ibridi.
Il rotore é costituito da due nuclei costituiti da lamierini ferromagnetici dentati
(coppette), assemblati in modo tale che i denti di una coppetta siano sfalsati di
mezzo passo di dentatura rispetto a quelli dell'altra e separati da un magnete
permanente magnetizzato in direzione assiale; in tal modo i denti di una coppetta
risultano tutti magnetizzati nord, quelli dell'altra tutti magnetizzati sud (fig. M125). Lo statore é costituito da lamierini con un numero pari di espansioni polari
dentate, su cui sono disposte delle bobine, tra loro connesse in modo da
realizzare due fasi.
Fig. M12-5
Quando si eccita (fig. M12-6) la fase A i denti della coppetta anteriore (S) si
allineano con i denti del polo nord della fase A; quelli della coppetta posteriore
(N) con i denti del polo sud della fase A. Diseccitando la fase A e eccitando la
fase B il rotore si sposta di ¼ di passo di dentatura in modo da allinearsi con i
denti dei poli della fase B.
Fig. M12-6
Le principali caratteristiche di tale tipo di motore, che é più costoso di quello a
magneti permanenti, sono l'alta precisione di posizionamento, le elevate
prestazioni in coppia e in velocità e il buon smorzamento.
184
Appunti di “Elettrotecnica e Macchine Elettriche” - L. Taponecco
M12-4. Funzionamento in condizioni statiche e dinamiche.
Una caratteristica peculiare del motore passo-passo è quella di trattenere il rotore
in una posizione di equilibrio stabile. Se cerchiamo di spostarlo da tale posizione
nasce infatti una coppia che contrasta tale azione, il cui valore massimo prende il
nome di coppia di tenuta (HT) o di coppia residua (DT) a seconda che il motore
sia alimentato a corrente nominale o non sia alimentato (fig. M12-7).
In condizioni dinamiche il motore passo-passo sviluppa una coppia sincrona o di
pull-out (fig. M12-8), che è più o meno elevata in relazione al valore che la
corrente riesce a raggiungere nelle fasi alimentate in successione. Tale coppia è
pari a circa la metà della coppia di tenuta nel funzionamento a bassa velocità e
diminuisce progressivamente all'aumentare della velocità fino ad annullarsi.
Questa diminuzione é dovuta alla riduzione della corrente dovuta sia alla
maggiore f.c.e.m. di natura mozionale, sia al fatto che la corrente non riesce a
raggiungere il valore finale poiché nel frattempo viene effettuata una nuova
commutazione.
Fig. M12-7
Fig. M12-8
E' possibile aumentare la coppia di pull-out alle alte velocità forzando la corrente
a salire più rapidamente nelle fasi del motore (fig. M12-9). Ciò può ottenersi ad
esempio utilizzando una tensione di alimentazione molto maggiore di quella
nominale e un pilotaggio switching non appena la corrente supera di poco il
valore nominale.
Fig. M12-9
185
Appunti di “Elettrotecnica e Macchine Elettriche” - L. Taponecco
M12-5. Configurazione del convertitore.
In figura M12-10a è mostrata una comune struttura di convertitore con pilotaggio
bipolare per motori passo-passo a magneti permanenti o ibridi.
Per passare da una configurazione (es. IA IB) alla successiva (IA -IB) é necessario
invertire il senso della corrente in una fase (B) nel più breve tempo possibile (fig.
M12-10b), interdicendo i due transistori attivi del relativo ponte (T5 e T8) e
rendendo attivi gli altri due (T6 e T7). In tale caso la successione delle
configurazioni è: IAIB IA-IB -IA-IB -IAIB IAIB ecc.; nel caso invece in cui si
alimenti una fase per volta è: IA IB -IA -IB IA ecc.
In figura M12-10c è mostrato l'andamento della corrente in una fase.
Fig. M12-10a
Fig. M12-10c
Fig. M12-10b
Concludendo nella pratica il motore a riluttanza variabile viene usato solo quando
é necessario che la coppia residua sia molto piccola; mentre quello ibrido quando
interessa: precisione angolare elevata, alta velocità, alta coppia e notevole
risoluzione. In tutti gli altri casi la scelta cade sul motore a magneti permanenti
per il suo basso costo.
186
Appunti di “Elettrotecnica e Macchine Elettriche” - L. Taponecco
Nella tabella M12-1 sono riportati i dati di alcuni motori passo-passo ibridi.
Tab. M12-1
187