L. Taponecco - Appunti di Meccatronica
Cap. I - Generalità sugli azionamenti elettrici.
I-1. Introduzione.
L'energia, presente in natura sotto varie forme, perchè sia utilizzabile deve essere
disponibile nei luoghi dove occorre e nella forma che interessa. Questo problema é
risolto, nella maggior parte dei casi, trasformando le energie primarie disponibili in
energia elettrica, in quanto tale tipo di energia può essere trasportato a lunghe
distanze con basse perdite e costi accettabili e presenta una tale flessibilità da
consentirgli di essere facilmente trasformato nella forma desiderata (meccanica,
luminosa, termica). Circa il 60% di tutta l'energia elettrica prodotta viene trasformata
in meccanica mediante motori elettrici.
Nel caso però in cui si desideri ottenere un'energia meccanica pregiata con coppia e
velocità controllabili, occorre trasformare la generica rete rigida disponibile in una
flessibile. Pertanto la conversione elettromeccanica dell'energia deve essere
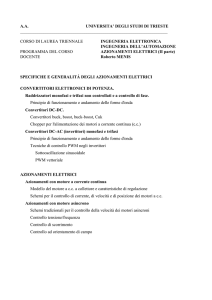
effettuata utilizzando non un semplice motore elettrico, ma un azionamento elettrico
(fig. I-1), cioè un sistema che comprende motore elettrico, dispositivi di conversione
statica dell'energia elettrica, sensori di grandezze meccaniche, elettriche e termiche
ed un sistema di controllo. Inoltre tra rete di alimentazione e sistema di conversione
statica dell'energia elettrica è generalmente presente, oltre ad un trasformatore per
adattare la tensione di rete a quella dell'azionamento, un filtro.
Fig. I-1
La funzione base degli azionamenti elettrici è quella di controllare il flusso di
energia dalla rete al processo, cioè una delle due quantità fisiche che descrivono lo
stato dell'albero del motore: coppia e velocità. A seconda della variabile controllata
si parlerà di controllo di coppia (in tale caso la velocità sarà determinata dal carico) o
di controllo di velocità (in tale caso sarà la coppia ad essere determinata dal carico)
La figura I-1 evidenzia che nell'azionamento coesistono due sistemi, uno di potenza
(linee grosse) e uno di segnale (linee sottili).
Compito del sistema di controllo è agire tramite il sistema di conversione statica
sulle grandezze di ingresso del motore elettrico (tensione e/o frequenza)
manipolandole in modo da realizzare i previsti cicli di lavoro con un adeguato livello
di precisione e di velocità di risposta.
9
L. Taponecco - Appunti di Meccatronica
Gli azionamenti possono essere del tipo: ad anello aperto, ad anello chiuso, ad anello
chiuso e catena di azione diretta.
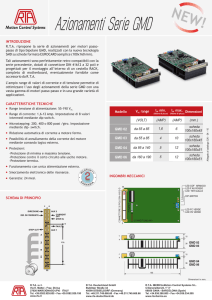
Gli azionamenti ad anello aperto vengono impiegati nei casi in cui le caratteristiche
statiche coppia-velocità del sistema convertitore+motore sono compatibili con quelle
del carico ed intrinsecamente stabili. Tali azionamenti presentano il vantaggio di non
necessitare di sensori di misura delle grandezze controllate (tipicamente: corrente,
velocità e posizione); comportano però delle imprecisioni (differenza fra valore
desiderato e valore effettivo) dovute alla non costanza nel tempo dei vari parametri
in gioco e al fatto che qualsiasi perturbazione agente sull'asse motore modifica la
velocità di rotazione senza nessuna possibilità di correzione (fig. I-2).
Fig. I-2
Fig. I-3
Gli azionamenti ad anello chiuso sono più complessi di quelli ad anello aperto, ma
sono molto più flessibili e robusti rispetto a variazioni dei parametri del processo e
dei disturbi di coppia e possono rendere stabile un sistema che di per sé non lo è. In
ingresso si ha un segnale dato dalla differenza fra il valore di riferimento e quello
misurato della variabile che si vuole controllare; pertanto essendo le grandezze
controllate (coppia, velocità o posizione) costantemente monitorate mediante
opportuni trasduttori, presentano comportamenti molto precisi (fig. I-3).
Uno degli obiettivi principali nel progetto di un sistema di controllo per
l'inseguimento di traiettorie è quello di avere, nel caso ideale, un errore perfettamente
nullo. La presenza di sole azioni di controllo in retroazione, che sono basate
intrinsecamente sul segnale errore, non riesce in generale a garantire questa
specifica. Una possibile soluzione a questo problema è quella di adottare schemi con
azioni di controllo in avanti, che però non sempre sono realizzabili.
Gli azionamenti ad anello chiuso e catena di azione diretta presentano, oltre alla
retroazione, una azione diretta in avanti; essi vengono impiegati nei casi in cui le
specifiche sono molto spinte e si richiede che le grandezze di comando del
convertitore siano tali da realizzare in tempo reale le leggi di moto desiderate.
10
L. Taponecco - Appunti di Meccatronica
Svariati sono i benefici apportati al mondo del lavoro dagli azionamenti elettrici:
maggiore produttività, precisione di lavorazione, flessibilità e razionalizzazione
dell'uso delle macchine operatrici, contenimento di consumi energetici con
conseguente diminuzione dei costi complessivi di gestione degli impianti e
dell'inquinamento ambientale, risparmio sugli oneri di manutenzione degli impianti,
in quanto col controllo della velocità è possibile limitare anche l'usura delle parti
meccaniche, avviamenti dolci, maggiori funzioni di sicurezza con diminuzione del
numero di apparecchiature esterne, minore potenza installata.
Naturalmente il passaggio da un semplice motore elettrico ad un più complesso
azionamento elettrico comporta anche alcuni inconvenienti, che devono
necessariamente essere accettati se si vogliono ottenere determinate prestazioni
altrimenti impossibili da conseguire. Tali inconvenienti sono: introduzione di
armoniche sia nella rete di alimentazione (con conseguente peggioramento della
qualità di potenza del sistema e disturbi su altri carichi allacciati alla stessa rete) che
nel motore alimentato (con conseguente aumento degli stress termici e meccanici,
riduzione del rendimento, declassamento e maggiore rumorosità), necessità di
introdurre un filtro lato rete per ridurre la distorsione in linea a livelli compatibili con
le norme, diminuzione di affidabilità e di capacità di sovraccarico del sistema,
necessità di sistemi di ventilazione ausiliari asserviti e maggiori costi.
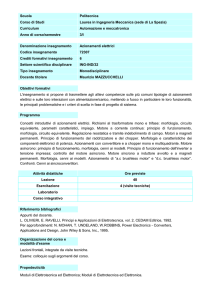
I maggiori costi però in molte applicazioni (in particolare pompe, compressori e
ventilatori, che assorbono circa il 40% del consumo industriale dell'energia elettrica)
possono essere ammortizzati in tempi relativamente brevi grazie al conseguente
consistente risparmio energetico di funzionamento ottenibile non solo nella
conversione elettromeccanica dell'energia e nel trasformatore a monte del motore
(fig. I-4) ma anche nella centrale elettrica e nella linea di trasporto dell'energia dalla
centrale fino al punto di utilizzo.
Fig. I-4
11
L. Taponecco - Appunti di Meccatronica
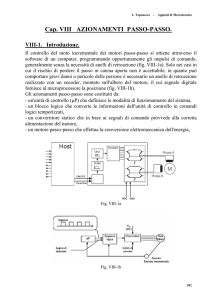
In figura I-5 è mostrata la potenza assorbita da un ventilatore centrifugo azionato da
un motore asincrono in funzione della portata nel caso di:
- installazione classica con motore collegato direttamente alla rete di alimentazione e
e quindi funzionante a velocità praticamente costante; in tale caso la regolazione
della portata del fluido si ottiene con l'ausilio di dispositivi di tipo meccanico
(valvole, serrande, ecc.) e la diminuzione della portata riduce in modo non sensibile
l'energia assorbita (curva 1); ad esempio una riduzione della portata nominale del
20% comporta una riduzione di energia assorbita del 5% ;
- installazione con variatore di velocità in cui la variazione della portata si ottiene
variando la velocità del motore con conseguente considerevole riduzione della
energia assorbita dal motore (curva 2); ad esempio una riduzione della portata
nominale del 20% comporta una riduzione dell'energia assorbita del 50%.
Fig. I-5
Variare la velocità di un ventilatore o di una pompa per regolare la portata di un
fluido è come rimpiazzarli con altri di differenti caratteristiche e in particolare di
minore potenza con conseguenti minori costi di investimento e di funzionamento.
Pertanto se il funzionamento a pieno carico si verifica solo per brevi periodi di
tempo, il risparmio energetico è notevole e quindi il tempo medio di ammortamento
dei maggiori costi di impianto dovuti all'acquisto ed all'installazione dell'inverter può
essere molto breve.
Alcuni esempi di applicazioni in cui la variazione di velocità consente migliori prestazioni a livello funzionale ed
energetico sono:
-distribuzione dell'acqua potabile mediante stazioni di pompaggio in cui la regolazione della velocità della pompa
sommersa e del compressore garantisce agli utenti la giusta pressione con qualsiasi perdita di carico/numero di allacci
contemporanei;
-trattamento delle acque mediante depuratori in cui l'ottimizzazione del processo biologico è garantita dal controllo della
portata d'aria fornita da compressori regolati in velocità;
-ventilazione gallerie in cui in relazione al grado di inquinamento prodotto dai veicoli la portata d'aria fresca immessa
viene variata regolando la velocità dei ventilatori;
-sistemi di trasporto di materiale con convogliatori a cinghia; quando si richiede un continuo adattamento della quantità
di materiale trasportato alle diverse esigenze del ciclo produttivo;
-locali ad atmosfera controllata le portate sono regolate in funzione delle esigenze di funzionamento;
-ambito casalingo utilizzo di azionamenti elettrici al posto di interruttori bi-metallici per i compressori dei frigoriferi e
per i condizionatori;
-regolazione della portata d'aria nel processo di produzione del cemento.
12
L. Taponecco - Appunti di Meccatronica
In figura I-6 è mostrato come viene rappresentato un azionamento elettrico nelle
Norme
Fig. I-6
Come si può notare un azionamento elettrico o PDS (Power Drive System)
comprende:
a) un gruppo di alimentazione, conversione e controllo CDM (Complete Drive
Module) costituito da:
-a1) una sezione di ingresso o di alimentazione (interruttore e trasformatore)
-a2) un modulo di conversione e controllo BDM (Basic Drive Module), che
comprende: un sistema di conversione statico, l'insieme dei dispositivi di controllo
(pilotaggio dei tasti elettronici, regolazione statica e dinamica, diagnostica,
protezioni, interfaccia col processo, ecc.) e i circuiti ausiliari per il corretto
funzionamento dell'insieme (ventilazione, interblocchi di sicurezza, ecc.)
b) un gruppo motore, che comprende: il motore, i sensori di corrente, velocità e
posizione, le protezioni e gli ausiliari del motore.
13
L. Taponecco - Appunti di Meccatronica
Vari sono i campi di applicazione degli azionamenti elettrici in ambienti civili,
industriali, militari e nei sistemi di trasporto. Alcune applicazioni con i relativi campi
tipici di potenza sono riportate in tabella I-1.
Applicazioni
azionamento assi per macchine utensili
azionamento mandrino per macchine utensili
laminatoi e linee di trattamento siderurgiche
macchine per la lavorazione di plastica, legno, cemento, vetro, ecc.
manipolatori di materiali: nastri trasportatori, sollevatori (ascensori, gru,
montacarichi), convogliatori, ecc.
movimentazione di fluidi: pompe, ventilatori, compressori, ecc.
servomeccanismi in genere: robot, puntamento di armi e radar, ecc.
veicoli a trazione elettrica: treni, metropolitane, tram, funivie, auto, ecc.
veicoli a trazione elettrica leggera: scooter, biciclette, ecc.
applicazioni automobilistiche: ventole, motorini avviamento, tergicristalli, ecc.
Valori tipici di
potenza (kW)
0,5÷5
3÷200
300÷10.000
5÷200
5÷100
2÷1000
0,5÷100
20÷4000
1÷10
0,1÷1
Tab. I-1
Nel grafico di figura I-7 sono riportate alcune applicazioni industriali; si va dalle
pompe per gli impianti idroelettrici con potenze di oltre 100 MW e moderate
prestazioni ai robot con potenze di qualche kW ed ampi campi di variazione della
velocità, alta dinamica ed elevata precisione.
Fig. I-7
A livello industriale le applicazioni più frequenti riguardano i seguenti settori:
-turbo macchine (ventilatori, pompe, compressori); -acciaierie (laminatoi, trafile); cementifici (nastri trasportatori, mulini, forno rotante); -industrie chimiche (estrusori,
pompe dosatrici, bobinatrici); -industrie tessili (telai, stampanti per tessuti); -cartiere
(ribobinatrici, calandre); -lavorazione materiali ferrosi e non (torni, frese, presse,
centri di lavorazione); -industrie per l'automobile (linee d'assemblaggio, portali di
saldatura).
14
L. Taponecco - Appunti di Meccatronica
Principali tipologie di azionamenti elettrici.
Azionamenti in corrente continua. Sono stati i primi ad essere sviluppati e sono
tuttora molto diffusi per la semplicità ed economicità del controllo, per la elevata
precisione e le ottime risposte dinamiche in coppia e velocità. La presenza del
commutatore meccanico comporta però limiti di velocità e ambientali e maggiori
costi di manutenzione e del motore.
Azionamenti asincroni. Hanno iniziato a diffondersi a partire dalla fine degli anni
'60 a seguito dei notevoli progressi tecnologici e riduzione dei costi verificatisi nel
campo dell'elettronica di potenza e di segnale. Tali azionamenti presentano rispetto a
quelli in corrente continua vari vantaggi in relazione alle caratteristiche del motore
utilizzato; in particolare: minore costo, maggiore robustezza ed economicità,
manutenzione e vincoli ambientali molto ridotti, più elevata velocità massima e
minore inerzia. Il convertitore e l'unità di controllo sono però più complessi e
costosi, specie nel caso di azionamenti ad alta dinamica, e il motore deve essere
declassato se è previsto il funzionamento a coppia nominale a bassa velocità; infatti
(diversamente dai motori in corrente continua) i motori asincroni di serie sono
autoventilati, cioè raffreddati con ventole calettate sul loro asse, pertanto alle basse
velocità la loro capacità di asportazione del calore si riduce. Attualmente si assiste ad
una sempre più massiccia diffusione degli azionamenti asincroni in stretta
connessione alla rapida evoluzione dei componenti elettronici di potenza e di
segnale, alla disponibilità di microprocessori sempre più potenti e sempre meno
costosi e alla conseguente possibilità di implementare tecniche di controllo più
sofisticate.
Azionamenti brushless. Di introduzione relativamente più recente, presentano i
pregi ma non gli inconvenienti tipici degli azionamenti in corrente continua, connessi
alla presenza del commutatore meccanico, e sono particolarmente adatti per le
applicazioni che richiedono elevate prestazioni dinamiche, compattezza e bassa
manutenzione.
Azionamenti passo-passo. Sono la soluzione vincente per posizionamenti veloci e
precisi, quando le potenze in gioco sono modeste (≤ 1 kW).
Azionamenti SRM. Rappresentano una interessante prospettiva futura grazie al loro
basso costo di acquisto e di manutenzione, alla loro elevata affidabilità e rendimento
e alla possibilità di operare anche in condizioni ambientali particolarmente gravose.
Il loro utilizzo si sta infatti estendendo a svariati prodotti destinati al grande
consumo, anche se comportano ancora complicazioni a livello di controllo per
limitare le ondulazioni di coppia ed il rumore acustico intrinsecamente connessi al
loro funzionamento.
15
L. Taponecco - Appunti di Meccatronica
In ambito industriale sono impiegati anche:
- azionamenti idraulici (la cui sorgente primaria di energia é costituita da una
pompa idraulica) caratterizzati da semplice struttura, elevata affidabilità, facilità di
controllo di coppia, velocità e posizione, ottimi rapporti potenza/peso e alte coppie e
basse velocità (non richiedono riduttori), ma anche da inquinamento per perdite
d'olio, bassi rendimenti, costi relativamente elevati, ingombri e manutenzione;
- azionamenti pneumatici (la cui sorgente primaria di energia é costituita da un
serbatoio di aria compressa) caratterizzati da robustezza, costo relativamente basso,
alta velocità e, non comportando perdite d'olio, da assenza di problemi di
inquinamento ambientale e di pericoli di incendio e di esplosione, ma anche da bassi
rendimenti (≅ 0,2), rumorosità e limitata accuratezza a causa della comprimibilità
dell'aria e pertanto poco usati in meccatronica, maggiori esigenze di manutenzione e
necessità di filtri per l'aria.
L'attuale tendenza del mercato evidenzia però una notevole e crescente espansione
degli azionamenti elettrici a spese di quelli idraulici e pneumatici ed anche di
complessi sistemi meccanici (variatori meccanici, pulegge variabili, ecc.).
Ciò in quanto gli azionamenti elettrici sono caratterizzati da:
- disponibilità di vasti campi di variazione della potenza [da 10-6 W (orologi
elettronici) a 108 W (impianti di pompaggio) fig. I-8], della coppia [fino a 107 Nm] e
della velocità [fino a 105 g/1'];
- bassi costi, elevati rendimenti, ridotta manutenzione e dimensioni, lunga vita, basse
vibrazioni, semplicità di impiego;
- elevata dinamica, possibilità di operare in tutti e quattro i quadranti del piano C-Ω
e possibilità di recupero dell'energia di frenatura;
- semplicità di controllo, la loro caratteristica meccanica può essere adattata alle
necessità della macchina azionata senza interporre cambi meccanici;
- assenza di effetti nocivi nell'ambiente in cui operano (non richiedono combustibili
pericolosi e non emettono gas di scarico).
Fig. I-8
16
L. Taponecco - Appunti di Meccatronica
Nelle macchine utensili, i cui azionamenti elettrici raggiungono prestazioni (in
termini di precisione di lavorazione, affidabilità, tempi brevi di manutenzione,
flessibilità programmabile) di livello raramente riscontrabile in campo industriale,
sono necessari un movimento di posizionamento del pezzo da lavorare, un
movimento principale di lavoro che determina il taglio e un movimento ausiliario di
alimentazione che consente all'utensile di continuare ad agire sul pezzo.
L'azionamento preposto a garantire il moto principale di lavoro viene detto
azionamento mandrino, quello che provvede ai moti di posizionamento ed
avanzamento del pezzo da lavorare azionamento asse. Un tempo i diversi movimenti
erano derivati da un unico motore, ma attualmente, per semplificare le strutture
meccaniche del sistema, si impiegano motori diversi per ogni moto, i cui movimenti
sono coordinati da un'unica unità di controllo.
Il requisito principale degli azionamenti mandrino, il cui moto può essere rotatorio
(torni, fresatrici, alesatrici, trapani, ecc.) o alternativo (piallatrici, limatrici, ecc.), é
poter consentire, a seconda del tipo di utensile e di materiale trattato, la velocità di
taglio più opportuna per ogni tipo di lavorazione (valori elevati comportano un'usura
troppo rapida degli utensili, mentre valori bassi un aumento del tempo di lavoro) e
garantire una velocità costante nel movimento a regime. Ciò implica l'esigenza di
poter disporre di velocità variabili con continuità in campi molto ampi (anche
maggiori di 1-100) e il moto deve avvenire a tutte le velocità col minimo disturbo di
coppia e vibrazioni (é cioè richiesta una buona insensibilità della velocità alla presa
di carico e un funzionamento con bassa ondulazione di coppia) con la possibilità di
regolare a potenza costante il motore su un ampio campo di velocità, perchè in
genere si richiede uno sforzo decrescente all'aumentare della velocità; alle basse
velocità però, quando la coppia massima ammissibile costituisce un limite per la
struttura della macchina, la regolazione é a coppia costante. Le caratteristiche
dinamiche sono importanti ma non essenziali.
Gli azionamenti assi, destinati ai moti di posizionamento ed avanzamento con
continue accelerazioni e decelerazioni, incidono in modo preponderante sul livello
qualitativo del prodotto lavorato; essi impiegano in genere servomotori, cioè motori
in corrente continua a magneti permanenti, brushless, asincroni o passo-passo
dimensionati specificatamente per ottenere i seguenti requisiti:
-eccellente dinamica ed alto smorzamento (in modo da raggiungere la posizione
finale nel minor tempo e con assenza di oscillazioni),
-elevata precisione di posizionamento e di lavorazione,
-regolarità del moto alle basse velocità,
-alta capacità di sovraccarico ed elevata rigidità alle variazioni di carico (il
movimento deve essere indipendente dall'azione delle forze resistenti di taglio e di
attrito),
-elevato campo di regolazione,
- ridotti pesi e dimensioni (particolarmente importanti nella robotica, quando i
servomotori sono situati su bracci mobili).
17
L. Taponecco - Appunti di Meccatronica
I-2. Specifiche degli azionamenti elettrici.
Per progettare o semplicemente scegliere un azionamento elettrico é fondamentale
acquisire preliminarmente una certa quantità di informazioni, poiché si tratta di un
sistema (fig. I-9) che interagisce in vari modi con il mondo esterno che lo circonda
ed in particolare:
- con la rete elettrica attraverso i morsetti di alimentazione (porta elettrica);
- con la macchina azionata attraverso l'albero motore (porta meccanica);
- con l'operatore o gli apparati esterni di comando attraverso gli organi di
comunicazione uomo-macchina (porta di comunicazione);
- con l'ambiente circostante attraverso i fenomeni di interscambio termico,
elettromagnetico e altre interazioni di carattere ambientale (porta ambientale).
Fig. I-9
- Caratteristiche della rete di alimentazione disponibile: tensione, frequenza, tipo
di protezioni, livello di disturbi accettabili, ecc.; per consentire agli azionamenti di
operare correttamente anche in presenza di possibili variazioni di tensione e
frequenza, sovratensioni impulsive di origine interna (manovre sulla rete) o esterna
(fulminazioni), buchi di tensione e armoniche, è necessario introdurre, oltre ad un
trasformatore, un filtro di ingresso ed eventualmente un gruppo di continuità.
- Caratteristiche della porta di comunicazione: cioè dell'interfaccia fra supervisore
del processo e azionamento e della rete di comunicazione se l'azionamento
interagisce con altri azionamenti [es. in una macchina operatrice l'azionamento
dell'utensile di taglio deve interagire con quello per il posizionamento del pezzo da
lavorare; in una fabbrica più macchine operatrici devono essere tra loro coordinate
per ottimizzare il ciclo produttivo; in una metropolitana automatica gli azionamenti
di trazione dei diversi convogli devono essere tra loro coordinati per regolare in
sicurezza la mobilità dei passeggeri e adeguare l'offerta di trasporto alla mutevole
domanda nelle diverse ore del giorno, rispettando criteri di economicità].
18
L. Taponecco - Appunti di Meccatronica
- Caratteristiche degli organi meccanici di trasmissione e di conversione del
moto. Tra motore elettrico e macchina azionata normalmente è interposto un
trasformatore meccanico, la cui funzione è modificare la velocità e la coppia di
funzionamento o convertire il moto da rotante a lineare in modo tale da adattare le
caratteristiche del motore a quelle del carico.
Fig. I-10
Denominate Ωm e Ωc le velocità di rotazione dell'albero del motore e del carico (fig.
I-10), i valori della coppia e dell'inerzia del carico riportati alla velocità dell'albero
del motore, si ottengono (trascurando gli attriti) imponendo la costanza
rispettivamente della potenza e dell'energia cinetica a monte e a valle degli organi
meccanici di trasmissione del moto:
P = Cc Ωc = Cm/eq Ωm
da cui: Cm/eq= Cc Ωc /Ωm = Cc / kr
2
2
W = ½ Jc Ωc = ½ Jm/eq Ωm da cui: Jm/eq = Jc / kr2
Pertanto indicato con kr il rapporto di riduzione tra la velocità di rotazione dell'albero
motore e quella del carico, i valori equivalenti dal lato motore della coppia e
dell'inerzia del carico sono uguali ai valori effettivi divisi rispettivamente per il
rapporto di riduzione e per il quadrato del rapporto di riduzione.
Nella vasta gamma degli organi meccanici di trasmissione e conversione del moto (giunti, alberi di trasmissione, coppie
di ingranaggi, cinghia più pulegge, vite con circolazione di sfere, leverismi, ecc.) possiamo distinguere tre categorie:
- a rapporto di trasmissione fisso, nel caso di ingranaggi ad alberi paralleli i rapporti di riduzione per stadio non sono
solitamente superiori a 3:1 e il numero di stadi di riduzione è al massimo pari a tre perché questo tipo di trasmissione di
solito è prevista per potenze medie ed elevate dove diventa inutile ed antieconomico spingersi con rapporti superiori e il
rendimento meccanico è elevato (98%); nel caso di ingranaggi epicicloidali si realizzano sistemi molto compatti;
- con profilo di moto invariante con camme;
- a rapporto di trasmissione variabile con sistemi puleggia/dischi conici.
In tabella I-2 sono riportate le caratteristiche peculiari di alcuni tipi di riduttore a
rapporto di trasmissione fisso.
RIDUTTORE
rapporto riduzione
rendimento
reversibilità
ingombro
costo
a vite senza fine
1/10 ÷ 1/100
basso
no per r<1/30
realizzazione compatta
basso
ad ingranaggi
1 ÷ 1/100
buono
totale
contenuto
basso
epicicloidale
1/10 ÷ 1/1.000
medio-alto
elevata
contenuto
medio-alto
Tab. I-2
19
L. Taponecco - Appunti di Meccatronica
In figura I-11 sono rappresentate differenti tipologie di trasmissione: ruote dentate,
cinghia dentata di massa trascurabile, vite senza fine, pignone e cremagliera, tappeto,
tamburo e trasmissione mista.
Z3 e Z4 numero di denti; Rp3 e Rp4 raggi delle primitive
Nm e Nc velocità angolari del motore e del carico
i rapporto di riduzione; m modulo della ruota dentata
mp e ms massa del pezzo e della slitta
p passo della vite senza fine [m/giro]
Jv suo momento di inerzia
Fig. I-11
Nei settori industriali e commerciali circa un terzo dei motori elettrici usano trasmissioni a cinghia (per lo più a sezione
trapezoidale per aumentare attrito, trasferimento di potenza e rendimento), che forniscono flessibilità nel
posizionamento del motore rispetto al carico e con pulegge di diametro variabile consentono di aumentare o ridurre la
velocità dell'apparecchiatura azionata. Un sistema si trasmissione a cinghia ben progettato è caratterizzato da alti
rendimenti (con punte iniziali del 95-98%), basso rumore acustico, assenza di lubrificazione e bassa manutenzione. Le
cinghie dentate rispetto a quelle a V durano più a lungo, richiedono meno manutenzione e ritensionamento, operano in
ambienti umidi e sporchi di olio, ruotano senza scorrimento e hanno rendimenti maggiori di circa il 2% e che non si
riducono in presenza di elevate coppie come invece si verifica in quelle non dentate a causa dell'aumentato scorrimento,
ma sono rumorose e trasferiscono vibrazioni.
20
L. Taponecco - Appunti di Meccatronica
- Catene cinematiche degli organi meccanici di trasmissione e di conversione del
moto. Per l'analisi dinamica, il sistema ''motore - organi di trasmissione meccanica carico'' viene rappresentato mediante semplici catene cinematiche costituite da
bipoli. La catena cinematica può essere rappresentata, una volta assegnato ad ogni
bipolo il corrispondente simbolo, mediante un grafo, in cui ad ogni nodo è assegnata
una velocità angolare (relativa a quella del nodo di riferimento) e ad ogni ramo una
coppia. In base alle leggi di equilibrio delle coppie e di continuità del moto, valgono
per i circuiti meccanici le leggi di Kirchhoff (la somma delle coppie che agiscono in
ogni nodo è nulla e la somma degli incrementi di velocità lungo una maglia è nulla).
Esiste infatti una analogia tra sistemi meccanici ed elettrici, in quanto entrambi sono
governati da equazioni formalmente identiche anche se riguardanti fenomeni fisici
diversi. Per poter agevolmente risolvere le catene cinematiche (nel caso di corpi
rigidi) è quindi possibile utilizzare il metodo della rete elettrica equivalente, basato
sulle corrispondenze: coppia/forza C/F ⇒ corrente I e velocità Ω/v ⇒ tensione V.
Le proprietà di dualità dei circuiti elettrici valgono anche per quelli meccanici, per
cui esiste anche l'analogia duale: C/F ⇒ V e Ω/v ⇒ I.
Ad esempio il sistema meccanico di figura I-12, retto dall'equazione F = mdv/dt + Hv + k∫(vdt), può essere trasformato
nella rete elettrica equivalente di figura I-13a o in quella di figura I-13b, dove si è posto C = m, G = H, L = 1/k.
Fig. I-12: sistema mecc
Fig. I-13a: Prima rete elettrica equiv
Fig. I-13b: Seconda rete elettrica equiv
Su queste analogie di base si fondano poi le altre:
posizione θ → carica q ; infatti:
inerzia J → induttanza L ; infatti per un sistema inerziale vale la relazione:
rigidità torsionale Kt → reciproco della capacità C ; infatti per un sistema elastico vale la relazione:
attrito viscoso B → resistenza R ; infatti per un sistema soggetto ad attrito viscoso vale la relazione:
In base a tali corrispondenze è evidente che introducendo i bipoli elettrici
corrispondenti a quelli meccanici (tab. I-3) è possibile studiare un circuito meccanico
avvalendosi del circuito elettrico analogo, con il vantaggio di estendere ai circuiti
meccanici tutte le metodologie delle reti elettriche.
21
L. Taponecco - Appunti di Meccatronica
I blocchi elementari utilizzati per modellizzare un sistema meccanico complesso sono:
1) inerziale: rappresenta la capacità di un corpo di opporsi alle variazioni di velocità; per corpi che ruotano (traslano) la
causa è una coppia τ (forza f) e l'effetto è una velocità angolare ω (lineare v): τ = J (dω/dt) f = M (dv/dt);
2) elastico: rappresenta la capacità di un corpo di deformarsi accumulando energia potenzial: τ=Kt(θ1 –θ2) f=Kt'(x1–x2)
con τ (f) coppia di reazione (forza) di tipo elastico della molla e Kt coefficiente di rigidità torsionale;
3) attrito viscoso: tiene conto degli effetti dissipativi che si hanno quando un corpo si muove in un fluido:
τ = B (ω1 –ω2 ) f = B' (v1 –v2 ) con B coefficiente di attrito viscoso.
Esempio.
Fig. I-14
Fig. I-15
τm : coppia del motore;
Jm: inerzia del motore e dell'albero;
θm: posizione angolare iniziale dell'albero;
Kt: rigidità torsionale dell'albero;
θL: posizione angolare finale dell'albero;
JL: inerzia del carico;
τL: coppia costante generata dal carico;
Br: coefficiente di attrito viscoso delle pale.
Equazioni di bilancio meccanico:
nella prima equazione i termini a destra del segno di uguaglianza costituiscono la coppia resistente per il motore; nella
seconda equazione il termine a sinistra del segno di uguaglianza rappresenta la coppia motrice. Da queste equazioni si
ricavano le equazioni del circuito elettrico analogo ed i rispettivi schemi elettrici:
Fig. I-16 schema elettr. 1° equaz.
Fig. I-17 schema elettr. 2° equaz.
Fig. I-18 schema elettr. completo
Altro esempio; per risolvere la rete meccanica di figura I-19
C m = J m pΩ m + J r pΩ r + H ⋅ Ω r + C r
Ω m = Ω r
si può utilizzare la rete elettrica equivalente di figura I-20.
Fig. I-19 Problema meccanico
Fig. I-20 Rete elettrica equivalente
22
L. Taponecco - Appunti di Meccatronica
In tabella I-3 sono riportati le corrispondenze tra bipoli meccanici e corrispondenti bipoli elettrici ed i relativi legami
costitutivi.
bipoli meccanici
legami costitutivi
bipoli elettrici
τ = costante
legami costitutivi
i = costante
gen.id. di corrente
gen. id. di coppia
gen. id. di forza
Ω = costante
v = costante
gen.id. di velocità angolare
gen.id. di tensione
gen.id. di velocità lineare
attrito
c = hΩ
f=hv
i = G⋅v
conduttore
i = C dv/dt
c = J dΩ/dt
condensatore
momento di inerzia
F = m dv/dt
massa
v = k dF/dt
Ω = k dc/dt
v = L di/dt
induttanza
molla elicoidale
v1/v2 = i2/i1 = K
Ω1/Ω2 = c2/c1 = K
riduttore/moltiplicatore di velocità
trasformatore ideale
v i = cΩ
motore elettrico ideale
c=hi
v=hΩ
Tab. I-3
23
L. Taponecco - Appunti di Meccatronica
- Caratteristiche del carico.
Poiché l'azionamento elettrico deve essere dimensionato in base alle caratteristiche
del carico e dell'ambiente in cui deve essere posizionato, per la scelta dei suoi
componenti (motore, convertitore statico, sensori, sistema di smaltimento delle
perdite, ecc.) è fondamentale conoscere della macchina azionata:
- caratteristica meccanica statica e momento di inerzia;
- ciclo di lavoro;
- quadranti di funzionamento;
- prestazioni statiche e dinamiche;
- limiti di coppia, potenza e velocità;
- assi di rotazione;
- caratteristiche di regolazione;
- ambiente di funzionamento.
- Caratteristiche meccaniche statiche. In condizioni di regime stazionario il punto
di lavoro dell'azionamento è dato dall'intersezione fra le caratteristiche meccaniche
statiche del carico e dell'attuatore (Fig. I-21). In condizioni dinamiche è necessario
conoscere il campo di operatività dell'attuatore, ossia la zona del piano C/Ω in cui
esso può lavorare in condizioni di servizio continuativo; in figura I-22 è
rappresentato il campo di operatività di un azionamento per sollevamenti.
L'individuazione del campo di operatività è necessaria in quanto vincolante per ciò
che riguarda la regolazione che l'azionamento è chiamato a svolgere.
Quadranti di funzionamento
1: azionamenti unidirezionali
1+4: azionamenti per trazione
1+2: azionamenti per sollevamenti
1+2+3+4: azionamenti per laminatoi,
macchine utensili, ecc.
Fig. I-21
Fig. I-22
Prendendo in esame le applicazioni più comuni è possibile individuare cinque casi
tipici di carichi: quattro di tipo passivo in cui la coppia del carico è sempre diretta in
modo da opporsi al moto e quindi il verso della coppia cambia quando cambia il
verso del moto (appartengono a questa categoria i carichi dovuti alla presenza di
forze di attrito e taglio o forze di deformazione in corpi rigidi non elastici, cioè forze
di tipo dissipativo) ed uno di tipo attivo in cui il verso della coppia è indipendente
dal verso del moto (appartengono a questa categoria i carichi dovuti alla presenza di
forze di gravitazionali o forze di deformazione elastica, ricollegabili ad energie
potenziali).
24
L. Taponecco - Appunti di Meccatronica
1- Macchine utensili, piallatrici, laminatoi, nastri trasportatori (fig. I-23), ecc.;
l'attrito secco provoca una coppia resistente praticamente costante al variare della
velocità (fig. I-24a) che dipende dalla ruvidità dei corpi a contatto e dalle
caratteristiche del materiale e degli utensili; spesso la coppia statica, per effetto
dell'attrito di primo distacco, é maggiore di quella di movimento (fig. I-24b).
Fig. I-23
Fig. I-24
2- Macchine per mescolare; l'attrito di tipo viscoso determina una coppia resistente
che cresce linearmente con la velocità, con pendenza dipendente da dimensioni e
peso dell'organo in movimento e dalla viscosità del fluido (fig. I-25).
Fig. I-25
3- macchine per movimentazione di fluidi (ventilatori, pompe e compressori
centrifughi, soffianti) per gasdotti, oleodotti, caldaie, impianti di ventilazione; la
coppia cresce col quadrato circa della velocità e dipende dalla prevalenza da
realizzare (fig. I-26), le prestazioni dinamiche sono limitate (non occorre né rapida
risposta, né precisione spinta) e il funzionamento è generalmente unidirezionale.
Fig. I-26
25
L. Taponecco - Appunti di Meccatronica
4- Torni e avvolgitrici; la coppia é inversamente proporzionale alla velocità (fig. I27). Negli azionamenti mandrino, quali i torni, la forza di taglio e la velocità
superficiale devono rimanere costanti durante la lavorazione; pertanto al ridursi del
raggio il controllo aumenta la velocità angolare del materiale e, poiché la riduzione
del raggio causa una corrispondente riduzione della coppia, la potenza rimane
costante. Anche nelle bobinatrici la forza di tiro e la velocità superficiale devono
rimanere costanti, pertanto il controllo deve aumentare (ridurre) la velocità angolare
del rullo quando del materiale è rimosso (aggiunto) dal (al) rullo.
Fig. I-27
5- Apparecchi per il sollevamento di carichi (carri ponte, gru, ascensori, ecc.); il
carico è di tipo attivo (fig. I-28) e la coppia resistente dipende dal peso sollevato ed è
circa costante al variare della velocità e del senso di rotazione; il funzionamento (nel
1° e 2° quadrante) è di tipo intermittente e la frenatura è a recupero fino a qualche
percento della velocità nominale in modo da limitare l'usura dei freni meccanici;
sono richieste prestazioni elevate per ottenere posizionamenti precisi in fase di
accostamento.
Fig. I-28
Nella realtà gli andamenti effettivi della coppia, essendo in genere di tipo composito,
si discostano più o meno da quelli teorici sopra indicati.
- Prestazioni statiche e dinamiche. Precisione, velocità di risposta, ecc.
26
L. Taponecco - Appunti di Meccatronica
- Cicli di lavoro; la conoscenza del ciclo di carico é importante anche per un corretto
dimensionamento del motore; infatti la coppia di inerzia, che durante i periodi di
decelerazione aiuta la coppia motrice a mantenere il moto a spese dell'energia
cinetica immagazzinata nei periodi di accelerazione, ci consente di utilizzare motori
di minore potenza in applicazioni (ad esempio presse e laminatoi) in cui il ciclo di
carico é caratterizzato per un tempo relativamente breve da una fase di sovraccarico e
per la restante parte del ciclo da una fase di riposo con coppia molto bassa.
L'attuatore deve essere scelto in modo che il proprio campo di operatività ricopra la
più onerosa caratteristica meccanica del carico tenendo in conto il servizio
(continuativo, periodico o di durata limitata) richiesto dal carico ed assicurando lo
svolgimento del servizio nei tempi previsti dalle esigenze del carico. Ad esempio in
figura I-29 è riportata la più onerosa caratteristica meccanica Tc(Ω) di un carico di
trazione ferroviaria (nella salita più ripida e con il massimo numero di vagoni
previsti) e il campo di operatività dell'azionamento di trazione in servizio
continuativo (area sottostante Ta(Ω) ); Ωr è la massima velocità di funzionamento
continuativo.
Fig. I-29
Fig. I-30
- Quadranti di funzionamento nel piano coppia-velocità in relazione alle
eventuali esigenze di reversibilità in velocità e/o coppia (fig. I-30). Esempi tipici:
- gli azionamenti per il trattamento dei fluidi (pompe e ventilatori) e delle materie
plastiche (calandre) lavorano solo nel 1° quadrante;
- gli azionamenti per trazione elettrica lavorano nel 1° (trazione) e 4° (frenatura)
quadrante;
- gli azionamenti per sollevamenti lavorano nel 1° (salita) e 2° (discesa) quadrante;
- gli azionamenti per macchine utensili, laminatoi e robotica lavorano in tutti e
quattro i quadranti.
Naturalmente, per motivi di ordine economico, è opportuno adottare azionamenti ad
un solo quadrante dove il tipo di funzionamento della macchina azionata lo consente.
- Assi di rotazione; il controllo del moto può riguardare movimentazioni con un solo
asse di rotazione o con più assi di rotazione, ciascuno dei quali può operare in modo
indipendente o essere variamente coordinato con gli altri (macchine utensili).
27
L. Taponecco - Appunti di Meccatronica
- Tipologia e dinamica del carico; poiché la coppia sviluppata dall'azionamento deve
equilibrare, oltre alla coppia utile Cc , le coppie di attrito secco Ca e viscoso Cv e la
coppia di inerzia JdΩ/dt, i carichi meccanici dal punto di vista della funzionalità
possono essere inquadrati in due classi:
- carichi di tipo dissipativo in cui l'energia fornita dall'azionamento è utilizzata
prevalentemente per effettuare la movimentazione o la lavorazione richiesta e per
vincere gli attriti [C ≅ Cv+Ca+Cc];
- carichi di tipo inerziale in cui l'energia fornita/assorbita dall'azionamento è utilizzata
quasi tutta per accelerare/decelerare il carico [C ≅ JdΩ/dt].
Fig. I-31
Fig. I-32
Dal confronto tra l'entità dell'energia necessaria per fare avvenire una variazione di
velocità e quella utilizzata dal carico e dissipata negli attriti possiamo distinguere i
seguenti comportamenti dinamici del carico:
- a dinamica molto lenta, in cui la coppia di tipo inerziale ha valore trascurabile
rispetto a quella di tipo dissipativo;
- a dinamica lenta, in cui la coppia di tipo inerziale non è più trascurabile rispetto a
quella di tipo dissipativo;
- a dinamica rapida, in cui la coppia di tipo inerziale risulta prevalente rispetto a
quella di tipo dissipativo;
- a dinamica molto rapida, in cui la coppia di tipo dissipativo ha valore trascurabile
rispetto a quella di tipo inerziale.
Tale inquadramento consente di mettere in relazione il comportamento dinamico del
carico (da dinamica molto lenta a dinamica molto rapida), i cui profili di velocità sono
tracciati a titolo esemplificativo in figura I-31, con il rapporto tra carico dissipativo e
carico inerziale (da alto a basso), con il rapporto di riduzione (da accoppiamento
tramite riduttore ad accoppiamento diretto) e con il flusso di energia (da unidirezionale
a bidirezionale) richiesto dalla movimentazione (fig. I-32).
28
L. Taponecco - Appunti di Meccatronica
- Limiti di coppia, potenza e velocità per funzionamento continuativo e transitorio.
Il limite di velocità é determinato dalle massime sollecitazioni meccaniche accettabili,
quelli di coppia e di potenza sono pari ai corrispondenti valori nominali (Cn e Pn) per
funzionamento continuativo, mentre per funzionamento transitorio assumono valori
maggiori (fig. I-33), che dipendono dalla durata e frequenza del transitorio e da come é
stato sovradimensionato il convertitore che alimenta il motore.
Fig. I-33
- Caratteristiche di regolazione: di coppia, velocità o posizione (costanti oppure
variabili secondo predeterminate leggi) e relativo scostamento statico e dinamico dai
rispettivi valori di riferimento per effetto della variazione del carico o di una
variazione a gradino del riferimento; massime pulsazioni di coppia, moto regolare a
bassissima velocità, controllo di posizione rapido e preciso, ecc.
Altre specifiche meccaniche possono riguardare le modalità di avviamento (in
particolare accelerazione e sua derivata) e la regolarità del moto. Tali specifiche sono
tipiche di tutti gli azionamenti che interagiscono con l'uomo (es. mezzi di trasporto),
dato che sono limitate le accelerazioni compatibili con il corpo umano, e di numerosi
azionamenti dedicati alle lavorazioni dei materiali, dato che le irregolarità del moto
si traducono in bassa qualità delle lavorazioni.
- Caratteristiche ambientali: presenza di gas pericolosi, di polveri, di agenti
chimici aggressivi, facilità o meno di accesso per la manutenzione; limiti di
emissione sonora e/o vibrazioni; limiti di insensibilità a radiodisturbi emessi da altri
apparati e di emissione di radiodisturbi, umidità, temperatura ambiente, altitudine,
ecc. Le specifiche ambientali possono condizionare fortemente la progettazione degli
azionamenti e le problematiche di compatibilità elettromagnetica tendono ad
acquistare una posizione predominante all'aumentare delle frequenze di lavoro e dei
livelli di potenza dei convertitori elettronici.
- Caratteristiche fisiche e dimensionali: dimensioni di ingombro, peso, attacchi per
l'installazione e la connessione al motore elettrico, vincoli per la manutenzione
(accessibilità e lavorabilità) e per lo smaltimento delle perdite (prese d'aria e
scarichi), particolarità di montaggio, dimensioni albero, ecc.
29
L. Taponecco - Appunti di Meccatronica
I-3. Applicazioni tipiche di azionamenti elettrici.
Sono riportate di seguito alcune applicazioni tipiche degli azionamenti elettrici allo
scopo di evidenziare l'estrema varietà delle prestazioni richieste.
Macchine utensili. Le macchine utensili appartengono sostanzialmente a due categorie: macchine per asportare truciolo
(torni, frese, alesatrici, rettificatrici) e macchine a deformazione (punzonatrici). I movimenti da regolare sono: quello di
lavoro (taglio e asportazione truciolo) svolto da azionamenti tipo mandrino e quello di alimentazione (posizionamento e
avanzamento dell'utensile e del pezzo da lavorare rispetto all'utensile) svolto da azionamenti tipo asse.
Azionamenti mandrino per tornio; la potenza massima (≈10÷100 kW) erogata in modo intermittente varia linearmente
con la velocità (fig. I-34) fino alla velocità nominale Ωn , rimane costante fino a Ω1 e varia in modo inversamente
proporzionale alla velocità fino a ΩM (con Ω1/Ωn ≈ 10÷20 e ΩM/Ωn ≈ 20÷50). Per quanto riguarda le prestazioni
dinamiche, la banda passante dell'anello di coppia è dell'ordine del centinaio di Hz, quella dell'anello di velocità della
diecina di Hz.
Sono caratterizzati da:
-prestazioni meccaniche a potenza costante; bassa velocità e coppia elevata per la lavorazione di pezzi di grande
diametro, viceversa per pezzi di piccolo diametro;
-funzionamento sul primo quadrante;
-prestazioni dinamiche elevate;
-può essere richiesto l'asservimento di posizione rispetto all'avanzamento (es. lavorazione viti).
Azionamenti asse; sono caratterizzati (fig. I-35) da:
-coppia richiesta non dipendente dalla velocità di avanzamento; le prestazioni meccaniche massime sono quindi a coppia
costante e il dimensionamento elettromeccanico dipende dalla coppia massima erogabile e dalla velocità massima;
-funzionamento su tutti e quattro i quadranti;
-controllore normalmente a tre anelli (di coppia, velocità e posizione)
-prestazioni dinamiche elevate per ottenere rapide variazioni di velocità, nonché velocità di taglio molto costante;
-può essere richiesta elevata precisione in caso di asservimento di posizione (es. lavorazione viti, dispositivi a copiare,
ecc.).
Fig. I-34
Fig. I-35
30
L. Taponecco - Appunti di Meccatronica
Azionamenti per sollevamenti; sono caratterizzati (fig. I-36) da:
-coppia richiesta dipendente sostanzialmente dal peso sollevato e poco dalla velocità; prestazioni meccaniche a coppia
costante nei vari intervalli;
-funzionamento nel primo e secondo quadrante (velocità bidirezionale e coppia unidirezionale);
-prestazioni dinamiche elevate, al fine di ottenere un posizionamento molto preciso in fase di accostamento.
Fig. I-36
Azionamenti per movimentazione fluidi. I campi di potenza e di velocità tipici per le applicazioni industriali sono
riportati in tabella I-4
Tab I-4
Le prescrizioni in termini di regolazione di velocità non risultano di norma particolarmente stringenti, mentre possono
essere elevate le richieste pertinenti le velocità massime da conseguire. La regolazione con continuatà della portata del
fluido si può ottenere con una velocità costante del motore che aziona la macchina operatrice e parzializzando il tempo
di utilizzo o avvalendosi di strozzature regolabili con conseguente dissipazione, oppure regolando la velocità della
macchina operatrice (fig. I-37).
Fig. I-37
Essi sono caratterizzati da:
-coppia richiesta circa proporzionale al quadrato della velocità;
-funzionamento sul primo quadrante;
-prestazioni dinamiche limitate, in quanto non occorrono né precisione spinta né risposte rapide;
-alto rendimento in quanto il funzionamento è di tipo continuativo.
31
L. Taponecco - Appunti di Meccatronica
Azionamenti per trazione elettrica. La trazione elettrica su ferro è caratterizzata da una ampia gamma di tensioni di
alimentazione (600-750-1500 V in corrente continua nella trazione urbana; 1,5-3 kV in corrente continua e 25 kV 50 Hz
nella trazione ferroviaria di Italia e Francia; 15 kV 16 2/3 Hz nella trazione ferroviaria di Svizzera e Germania) e
richiede azionamenti politensione se la circolazione dello stesso azionamento avviene su reti con diverse tensioni
nominali. Le potenze nominali alle ruote variano da circa 50 kW/asse per la trazione leggera (tram) a circa 2 MW/asse
per la trazione pesante o ad alta velocità.
Essi sono caratterizzati (fig. I-38) da:
-carichi ad elevata inerzia; è opportuno disporre della massima coppia possibile ad ogni velocità;
-funzionamento sul primo e quarto quadrante (la coppia deve invertirsi in fase di frenatura);
-prestazioni dinamiche limitate in velocità (non occorrono né alta precisione né rapida risposta) ma spinte in coppia per
poter intervenire rapidamente sulle accelerazioni;
-alto rendimento (in particolare nei veicoli a batteria).
Fig. I-38
Azionamenti per industrie siderurgiche. Il processo siderurgico si divide nella fase di produzione dell'acciaio
(partendo da minerale di ferro o rottame e impiegando forno ad arco o altoforno) e in quella successiva della
laminazione a caldo o a freddo. Le potenze e le velocità richieste si estendono da alcune decine di MW con velocità di
circa 1.000 giri/min a diverse centinaia di kW con velocità di circa 8.000 giri/min. Per la buona qualità delle lavorazioni
si richiedono precisioni di controllo della velocità molto elevate in relazione alle notevoli inerzie in gioco.
Azionamenti per cartiere. Nella fase di essiccamento e lisciatura il controllo della velocità deve essere particolarmente
accurato per evitare la rottura della continuità della carta. La dinamica, pur in presenza di notevoli inerzie, deve
presentare prestazioni spinte con banda passante per l'anello di coppia dell'ordine di 200 rad/s e di circa 10 rad/s per
l'anello di velocità. L'attuatore deve possedere grande elasticità (rapporto tra la velocità angolare massima e quella
minima a potenza costante Ω1/Ωn). Elevata deve essere la qualità della trasmissione meccanica con eliminazione di
giochi e limitazione delle frequenze di oscillazione torsionale.
32