Disaccoppiamento ?
Ogni circuito che comprenda componenti attivi dovrebbe avere abbastanza condensatori di
disaccoppiamento in parallelo all' alimentazione.
Questa necessità è troppo spesso ignorata in quanto non è ben chiaro quale sia lo scopo di questi
condensatori distribuiti sul circuito e si ritiene che quello posto dopo lo stabilizzatore di tensione sia
sufficiente in ogni caso.
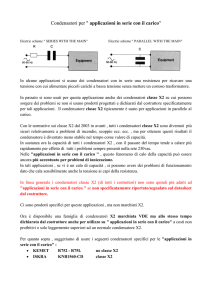
Prendiamo ad esempio un semplice regolatore lineare a tre terminali, del genere 7805, molto
comune nell' alimentazione di piccoli circuiti.
C1 svolge essenzialmente la funzione di costituire
una riserva di energia per il circuito integrato
stabilizzatore, mentre C4 lo è per i circuiti
successivi.
Inoltre, non va dimenticato, per la stabilità del
regolatore occorre che le capacità siano molto vicine
al componente. E, infatti, vanno considerate le
correnti impulsive che circolano nel circuito che
rendono necessario tenere presente che, al variare
della corrente, si presenta il fenomeno dell'
impedenza.
Variazioni rapide sul carico, come quelle imposte da circuiti digitali che passano rapidamente dallo
stato off allo stato on e viceversa costringono il regolatore lineare ad un gravoso lavoro a frequenze
elevate, cosa ne può rendere problematica la stabilità del regolatore lineare.
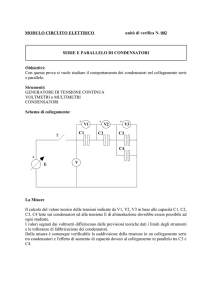
Una più corretta implementazione del
circuito sarà questa. Qui, la funzione dei
condensatori aggiunti al lineare è vista nella
giusta prospettiva
C2 e C3, tipicamente 0.1uF multistrato
ceramico, sono installati strettamente
vicino ai pin del regolatore per
assicurare la stabilità, ovvero l' impossibilità
di
innescare
fenomeni
oscillatori.
mentre C1 e C4, elettrolitici, costituiscono
le riserve per compensare il ripple
(variazioni della corrente del carico, C4, e
variazioni della tensione di ingresso, C1).
Classicamente il rapporto tra i due è 10:1
(ovvero, ad esempio, C1 potrà essere 470
uF e C4 47 uF).
Il diodo in serie svolge due funzioni: evita il pericolo dell'inversione di polarità e nello steso tempo
costituisce una separazione dal resto dell' alimentatore a monte.
Il diodo in controfase sul regolatore serve a scaricare un eventuale eccesso di carica dei
condensatori a valle, evitando l' inversione di polarità all' uscita del regolatore (questo succede
quando la capacità a valle è più alta di quella a monte e, al mancare della tensione principale, C1 si
scarica prima di C4 e degli eventuali altri condensatori in parallelo ad esso; e questo è uno dei
motivi per cui si dovrebbe sempre avere C4 < C1).
Come si vede, le considerazione da fare attorno ad un "semplice" regolatore lineare a tre terminali
non sono del tutto banali. Ed ancor più fondamentale diventa la cosa quando si tratta di componenti
digitali, dato che essi presentano un assorbimento di corrente impulsivo durante le commutazioni
oppure di componenti analogici con alti guadagni o ancora di circuiti in cui circolano segnali a
frequenze elevate.
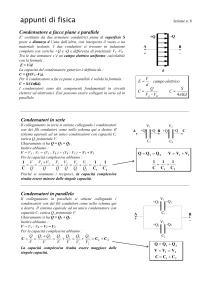
Ad esempio, in un microcontroller che accenda un
gruppo di LED collegati ai suoi I/O digitali, la
corrente assorbita passa da un livello minimo dell'
ordine di qualche milliampere o meno a LED spenti
per salire bruscamente a decine di volte con i LED
accesi.
Questo è abbastanza chiaro, ma quello che sfugge è
che
questa corrente che alimenta i LED passa
attraverso i pin di alimentazione del
microcontroller
ed i suoi componenti interni di comando del port !
Il percorso della corrente che accende il LED è
quello indicato nello schema a lato. Se ogni LED
assorbe 20 mA, con 8 LED accesi la corrente che
scorre nei pin di alimentazione positiva del
microcontroller è oltre 160 mA (8 x 20 mA + la
corrente
propria
di
funzionamento
del
microcontroller).
E questo può accadere in un tempo brevissimo: l'
istruzione
setf LEDPORT
che accende tutti i LED, a 8 MHz di clock è
eseguita in 500 ns.
Questo vuol dire che il sistema di alimentazione dovrà poter passare a fornire questa corrente
in un tempo altrettanto breve.
Lo stesso sarà per un carico collegato alla Vdd, dove andranno in conduzione i MOSFET N e la
corrente scorrerà tra la Vdd e il pin di massa.
Se consideriamo il tratto di circuito che va dalla sorgente di alimentazione al carico, solitamente lo
indichiamo con due semplici conduttori.
Vanno considerati due elementi:
il primo, molto semplice, è che dalla sorgente di alimentazione al microcontroller si
interpone una certa distanza attraverso la quale la corrente è portata dalle piste del
circuito stampato e magari anche da cavi di una certa lunghezza. Queste connessioni
hanno una resistenza dovuta alla resitività ρ del materiale conduttore, alla loro
sezione S ed alla loro lunghezza l.
R= ρ*l/S
Quindi, con una piccola corrente circolante I , ci sarà una piccola caduta di tensione ΔV= R I , ma
quando la corrente aumenta significativamente, anche la caduta di tensione sui collegamenti
aumenta in proporzione. E può avere anche dimensioni significative.
Ad esempio, per una resistenza delle connessioni (cavi, piste, morsetti) di un solo ohm, con 10 mA
ci saranno 0,01 V di caduta, normalmente del tutto trascurabile; ma ad un impulso di corrente da 1
ampere, la caduta sarà di ben 1 V. Anche se solo l' impulso ha breve durata, per quel tempo la
tensione di alimentazione degli integrati cade a 4 V dai 5 iniziali, il che può portare a problemi di
funzionamento e stabilità.
un secondo punto da considerare è il seguente:
Quando la corrente in un dispositivo cambia, l'alimentatore non può rispondere a
questo cambiamento istantaneamente. Di conseguenza, la tensione al dispositivo
cambia per un breve periodo prima che il sistema di stabilizzazione risponda alla variazione.
Un regolatore ben realizzato può rispondere a variazioni del carico dalla CC a qualche
centinaio o migliaio di Hz, a seconda di come è realizzato, ma eventi molto rapidi
(transitori) che si verificano a frequenze superiori, non possono essere seguiti ed è
necessario un intervallo di tempo prima che il regolatore risponda al nuovo livello della
domanda di energia.
E poi occorre comprendere che quello che riteniamo un circuito in corrente continua perchè
alimentato da uno stabilizzatore (ad esempio un lineare a tre terminali tipo 7805) a 5V, non
è affatto un circuito in continua !
Caratteristica di un circuito in corrente continua è la costanza della corrente che
scorre.
In un circuito in cui la corrente è costante, l' unico fenomeno che interviene è la resistenza
del materiale conduttore e l' unica relazione è la Legge di Ohm.
Ma nella realtà abbiamo appena visto che la corrente non è affatto costante. E la
variazione della corrente si riflette con l' apparire del fenomeno dell' induttanza, tanto più
evidente quanto maggiore è la velocità della variazione.
E l' induttanza si oppone alla variazione della corrente con una reattanza induttiva
proporzionale direttamente alla frequenza, o tempo di variazione della corrente (dI/dt)
Xl = 2 p f L
Va tenuto presente che, anche se la frequenza di commutazione è bassa, ad esempio facendo
lampeggiare i LED con un periodo di 500 ms, il tempo in cui la porta commuta è limitato
solo dalle sue caratteristiche e da quelle del carico collegato.
Tempi di commutazione dell' ordine dei ns o
ps sono del tutto comuni per le logiche attuali. Il
che vuol dire che l'onda quadra della
commutazione ha fronti di salita in cui il dV/dt è
molto più elevato.
Al variare della tensione varia in proporzione la
corrente e, di conseguenza, gli effetti induttivi
sono proporzionalmente più intensi.
Nell' immagine a lato, un impulso da 500 ms di
durata, ha il fronte di salita, ovvero il tempo
necessario per passare da livello basso a livello
alto, di meno di 100 ms: in sostanza, la
"frequenza" della commutazione non è 2 Hz,ma
cinque volte maggiore.
E va notato che questo tempo è imposto principalmente dall' elevato carico sull' uscita
digitale, dato che il gate che comanda la linea ha la possibilità di generare fronti di salita molto
più ripidi, dell' ordine dei ns.
Dunque, quando una porta deve fornire velocemente una certa quantita` di carica all'uscita, un
impulso di corrente passa attraverso uno dei due conduttori di alimentazione (ground o
alimentazione). Alla variazione della corrente impulsiva si oppongono gli aspetti parassiti
(induttanze distribuite e resistenze distribuite) dei collegamenti di alimentazione e la
velocità di risposta al transitorio del sistema di regolazione. Si genera un istante di variazione della
tensione di alimentazione che, se va oltre i limiti previsti, crea un malfunzionamento del circuito.
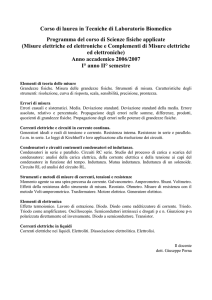
La situazione dei componenti reali, infatti è più complessa di quanto pensino molti che realizzano
circuiti ad alte prestazioni per poi ritrovarsi con problemi di funzionamento difficili da
diagnosticare.
Se lo schema elettrico (fig.a) è semplice e sembra completo, a frequenze elevate di funzionamento o
in presenza di commutazioni con fronti veloci, la situazione si complica (fig.b) in quanto i
condensatori reali possono essere molto diversi da quelli ideali (ESR, ESL) e le tracce del circuito
stampato, sia piste che pads, costituiscono reti di impedenze e capacità parassite. (L'immagine è
tratta da una delle pubblicazioni di Analog Devices. di cui si consiglia la consultazione).
In inglese si definisce ground bounce una variazione transitoria del potenziale di riferimento (o
della tensione di alimentazione) dovuta alla variazione di corrente assorbita dal un circuito.
Il picco di corrente richiesto deve essere fornito, quindi, da una sorgente ad impedenza
sufficientemente bassa, onde non rendere critiche le commutazioni a causa delle cadute di tensione
sulle piste di alimentazione.
Qui entra in gioco il condensatore di disaccoppiamento con la funzione di un "serbatoio" locale di
energia.
Se vogliamo un equivalente meccanico, possiamo pensare agli ammortizzatori, che, accumulando e
rilasciando energia meccanica, forniscono un supporto elastico che annulla o riduce i sobbalzi del
movimento del veicolo.
Il condensatore non è una pila o un accumulatore e non può fornire alimentazione CC, ma può
immagazzinare una certa quantità di carica elettrica (= energia) proporzionale alla
sua capacità e può rendere questa energia in modo estremamente rapido, limitato praticamente solo
dalle componenti parassite del condensatore stesso (ESR, ESL).
Così, l' applicazione di un condensatore locale in parallelo all' alimentazione la mantiene costante
per impulsi di assorbimento di corrente da centinaia di kHz a centinaia di MHz .
Disaccoppiamento è stato definito come l'arte e la pratica della separazione ed eliminazione di
accoppiamenti indesiderati porzioni di sistemi e circuiti per garantirne il corretto funzionamento
Dunque, disaccoppiare l' alimentazione ai vari elementi del circuito significa annullare o limitare
l'effetto della domanda improvvisa di corrente. Mentre il carico è inattivo, il condensatore si carica
a piena tensione di alimentazione; quando il carico viene applicato, il condensatore fornisce l'
impulso iniziale di corrente. Facendo in modo che l'induttanza delle piste sia arrivata a saturazione
prima del momento in cui il condensatore esaurisce la carica, il circuito avrà sempre a disposizione
una tensione entro i livelli corretti.
E va chiarito che anche per quanto riguarda i circuiti lineari è
necessario un disaccoppiamento di alimentazione, tanto più curato
quanto più è alta la frequenza di funzionamento, onde evitare
instabilita` e oscillazioni in circuiti che possono disporre di un elevato
guadagno.
A lato uno schema di principio tratto da una informativa di Analog
Devices.
Osservare anche qui l' indicazione della necessità di un punto comune
per la massa (= ritorno delle correnti), la cui implementazione migliora grandemente la situazione
nel funzionamento con correnti variabili, annullando l' impedenza delle piste di ritorno delle
correnti stesse e facendo della massa un reale punto a potenziale zero.
Facciamogli un bypass
Un'altro aspetto del problema è quello dei disturbi presenti sull' alimentazione, disturbi
provenienti dall' esterno o generati da parti del circuito stesso. Questo diventa sensibile in presenza
di componenti con elevate impedenze di ingresso, dove sono sufficienti basse correnti per disturbare
il funzionamento.
Per quanto riguarda i disturbi "esterni" al circuito, esempi eclatanti sono quelli generati dai motori a
collettore o dall' azionamento di contatti (relè, teleruttori), ma anche rumore elettrico provocato da
alimentatori switching, trasmettitori radio, macchine trifasi, ecc.
Però deve essere chiaro che lo stesso circuito può contenere fonti di rumore, anche
solo in quelle sezioni dove sono presenti correnti impulsive che interagiscono con i parametri di
dispersione (induttanza e capacità parassite) del circuito. Ma anche il rumore stesso dei
semiconduttori, ad esempio zener o regolatori di tensione, per non dire di relè, smps, ecc.
Ricordiamo che il condensatore riduce la sua impedenza all' aumentare della frequenza
Xc = 1 / (2 p f C)
dove f è la frequenza e C la capacità.
Quindi il condensatore costituisce una via di passaggio delle componenti a frequenza
elevata presenti sulle linee di alimentazione e che costituiscono una parte essenziale del disturbo,
dato che la sua impedenza si riduce all' aumentare della frequenza.
Facendo riferimento alla massa come punto comune di ritorno delle correnti che circolano nei vari
circuiti, lo scopo del condensatore è quello di cortocircuitare a massa queste componenti a
frequenza elevata.
Questo, ricordiamo, ha senso non solo per i circuiti alimentati in corrente alternata, ma anche (e
sopratutto) per quelli in "corrente continua" che proprio "continui" non sono e dove abbiamo fatto
notare che sussistono componenti variabili che, nella logica del circuito cc sono da considerare
nocivi o comunque indesiderabili.
In inglese è definito bypass l' aggiunta di un percorso di bassa impedenza per scaricare a massa i
transitori.
Ogni pin di un dispositivo attivo, derivato dalla tensione di alimentazione, dovrebbe
avere un proprio condensatore di disaccoppiamento.
Ne abbiamo visto un esempio nel secondo circuito proposto all' inizio della pagina: C2 e C3 non
hanno funzione di "serbatoio", ma quella di bypass, assicurando la stabilità del regolatore.
Un condensatore di disaccoppiamento di solito dovrebbe essere collocato il più vicino
possibile al dispositivo o direttamente posto sui pin di alimentazione. L'obiettivo è quello
di minimizzare la quantità di induttanza e la resistenza serie della linea di
alimentazione tra il regolatore principale e il dispositivo stesso: maggiore è la lunghezza delle
connessioni e maggiori saranno le componenti indesiderate. Dunque, la ragione della vicinanza
tanto più stretta possibile tra disaccoppiamento e dispositivo è giustificata.
Dato che i condensatori si differenziano per le loro caratteristiche (e condensatori con buone
caratteristiche ad alta frequenza sono comunemente tipi di piccola capacità, mentre i condensatori di
grandi dimensioni hanno solitamente peggiore risposta alle alte frequenze), il disaccoppiamento
spesso implica l'uso di una combinazione di condensatori. Per esempio, in circuiti logici
complessi, è comune una coppia composta da un 100 nF ceramico, combinato con condensatore
elettrolitico o al tantalio da qualche uF a qualche decina di uF.
In particolare, i circuiti a microprocessori, che funzionano ad elevate frequenze, molte decine o centinaia di
MHz, sono soggetti a correnti impulsive di frequenze analoghe; in questi casi si consiglia di utilizzare
sempre condensatori a basso ESR, multistrato ceramici, anche sotto forma di gruppi composti da più
elementi.
Va osservato che la la pratica di utilizzare coppie di condensatori non sempre è da considerare ideale, in
quanto, sopratutto in circuiti con alte frequenze di commutazione, gli effetti combinati delle induttanze,
capacità e resistenze parassite del circuito e dei condensatori potrebbe innescare fenomeni di risonanza, con
il peggioramento della situazione.
La maggior parte dei costruttori di ic ad alte prestazioni consiglia di
utilizzare condensatori del genere chip multistrato (MLC), anche se
nuove tecnologie, com LIC e LGA consento di ottenere valori
migliori di 5 nH di induttanza parassita (quando sono montati in
SMD), con in serie una resistenza da 20 mohm.
Questi condensatori possono offrire caratteristiche ESR/ESR molto
migliori dei modelli a film plastico, i noti "scatolini".
Questi componenti multistrato sono disponibili sia per
il montaggio tradizionale con terminali assiali o
radiali, sia per SMD, dove l' assenza di terminali e il
cablaggio diretto sulle piste consente di ottenere i
migliori risultati nell' eliminazione delle componenti
parassite dovute al montaggio.
In particolare, il consiglio dato dai costruttori di circuiti integrati è quello di:
Usare come minimo un condensatore per pin di alimentazione, posto
fisicamente vicino al pin stesso per ridurre l'induttanza parassita.
Tenere la lunghezza dei conduttori ai condensatori inferiore a 6 mm tra
le terminazioni del condensatore e i pin degli ic.
Utilizzare condensatori a bassa ESR/ESL
Qui alcune informazioni ulteriori sui condensatori
Ma che condensatore metto ?
In generale, un calcolo dei condensatori di disaccoppiamento, dal punto di vista delle formule matematiche,
richiede la conoscenza della quantità di corrente circolante (dipendende dalla corrente necessaria per passare
da livello baso a livello alto, dal numero degli I/O, dalla caduta di tensione ammissibile (dV) sulla Vcc, ecc.).
Una formula generica per il calcolo della capacità potrà essere:
C = [io * n x* dt / dV
Ad esempio, per un buffer con 8 uscite, genere 244, 245, 541, e simili, con dV = 0.1 v, dt = 3ns, N = 8 e io =
44 mA, si avrà
C = 44 * 8 * 3 / 0.1 = 0.01056 uF.
Però verifiche, misure e test su questo genere di situazioni richiede laboratori specifici e non è, in genere, alla
portata del singolo utente.
Quindi la scelta di un valore comunemente utilizzato, 0.1 uF, consigliato tra l' altro dai
fogli applicativi della maggior parte dei circuiti integrati, anche se generica, è più che valida.
Anche se il calcolo riporta a un elemento da 10 nF, il costo e l' ingombro dei due condensatori,
del genere ceramici monolitici, è praticamente lo stesso, per cui la scelta è meglio cada sull'
elemento di capacità maggiore, onde parare le conseguenze di altri elementi parassitari non
considerati.
Ormai si tratta di elementi di facile reperibilità e di costo limitato, disponibili con coefficienti
di temperatura X7R, X8R e C0G (NP0) e con precisioni fino al 5% o meglio.
l valore del condensatore di disaccoppiamento che dovrebbe essere utilizzato dipende dunque dal carico
del dispositivo, ma va considerato anche il fattore molto complesso delle induttanze
parassitarie generate dal circuito stampato.
Per far fronte a questo si possono mettere in pratica alcune strategie.
Una prima azione è quella di porre i condensatori di disaccoppiamento quanto più stretti possibile
al componente attivo, utilizzando piste per la distribuzione dell' alimentazione sufficientemente
ampie e brevi.
In caso di dubbio, il condensatore scelto dovrebbe essere maggiore del valore calcolato.
Una seconda azione, necessaria per circuiti stampati di una certa ampiezza, è quella di disporre le
piste di alimentazione a bus o comunque a blocchi e dotare i bus o i blocchi
di disaccoppiamenti propri,preferibilmente con condensatori al tantalio nel range 10-22 uF, o, se
non disponibili, in alluminio di buona qualità, nel range tra 22 e 220 uF, in grado di fornire le correnti di
ripple previste per quella data sezione.
Preferibilmente, invece di condensare le capacità in un solo punto, è opportuno distribuirle uniformemente
lungo le piste di alimentazione.
In generale è funzionale utilizzare un solo valore, o un numero ridotto di valori, dei condensatori di
disaccoppiamento di tutte le periferiche della scheda. Il valore deve soddisfare il caso peggiore.
In ogni caso, oltre al valore della capacità ed alla qualità del condensatore, conta sempre sensibilmente il
"dove" viene posto.
Ecco, ad esempio,
di Altera dal suo
un suggerimento
documento Power
Supply Integrity .
Da notare che sono specificate le distanze
massime dal componente per i condensatori
di bypass.
Si ricorre alla
composta da :
classica
distribuzione
un elettrolitico di capacità elevata, per la compensazione generale dei transitori di corrente (4703300 uF)
condensatori al tantalio (bassa ESR) a breve distanza da ogni dispositivo (47-100 uF)
condensatori ceramici MLC (bassissima ESR/ESL) a brevissima distanza dai pin (10 -100 nF)
Vediamo nelle foto seguenti alcuni esempi di posizionamento di condensatori sulle linee di alimentazione.
Classica disposizione dei condensatori di
bypass sull' alimentazione di ogni singolo IC in
una scheda VME bus
Un blocco di integrati TTL a cui è applicato un
condensatore di bypass (uno per ogni integrato), fissati
quanto più vicino possibile ai pin di alimentazione.
Zoccolo con condensatore di bypass
integrato (Mill-Max Manufacturing).
Questa
soluzione
evita
il
piazzamento del condensatore sullo
stampato, risparmiando spazio.
Multistrato 0.1 uF e tantalio 4.7 uF
associati strettamente ai pin di
alimentazione di uno zoccolo che
ospita microcontroller PIC.
E, dato che la frequenza, intesa anche come pendenza dei fronti di commutazione, è un elemento di
grande importanza, si può dire che, sotto i 50 MHz, il disaccoppiamento in generale non è gravoso,
seguendo le indicazioni di massima dette prima. Uno o due condensatori (spesso 0,01 uF - 10 uF o
più) collocati vicino all' ic sono adeguati.
Per frequenze superiori, o dove circolano correnti impulsive consistenti, con fronti di salita molto
veloci può essere necessario ricorrere a qualche forma di capacità distribuita. Ciò può essere
ottenuto utilizzando molti piccoli condensatori sparsi intorno l'IC o sfruttando la capacità interplane
del circuito stampato multi layer.
In particolare si deve considerare che se reti L-C sono poste in parallelo, la capacità totale è
pari alla somma delle capacità e l'induttanza totale è ridotta n volte, dove n è il
numero di elementi utilizzati. Altrettanto per la resistenza ESR.
C = C1+C2+C3..Cn
R = R1||R2||R3...Rn
Ovviamente, condensatori a minore l'induttanza e minore resistenza daranno risultati migliori.
Intel, ad esempio, consiglia di impiegare ben 41 condensatori in gruppi in parallelo per
disaccoppiare efficacemente un microprocessore Pentium ®-2 (Intel Application Note AP-
579).
Osservare come la specifica indichi anche le caratteristiche di ESR e ESL massime ammissibili,
oltre al tipo di condensatore da impiegare.
La stessa pubblicazione indica anche un
consiglio
sul
posizionamento
dei
condensatori che saranno distribuiti, ma in
ogni caso molto a ridosso dei pin.
In particolare, approfittando dello spazio
vuoto centrale dello zoccolo, alcuni
condensatori vi trovano posto.
Data la complessità del chip, si tratta di una
realizzazione in SMD, su circuiti stampati a
molti strati (anche 6 o più), di alcuni
fungono
da
masse-schermi
o
da
distribuzione dell' alimentazione, allo scopo
di minimizzare gli effetti parassitari delle
piste.
A lato, l' immagine di uno zoccolo per processore Intel Socket 370. Approfittando del vano
centrale dello zoccolo, si utilizza questo spazio per collocare
numerosi condensatori di bypass delle linee di alimentazione del
processore, assieme a resistenze di terminazione delle linee logiche
e al sensore di temperatura (in blu al centro dell' immagine).
La disposizione consente di avere i condensatori di bypass dallo
stesso lato dei componenti trough hole e, nello stesso tempo, molto
vicini ai pin del processore. La tecnologia SMD è di rigore in
questo genere di assemblaggi ad altissima densità.
Nell' immagine a lato, i più recenti
sviluppi dei condensatori a bassissimo
ESR/ESL (AVX), realizzati con nuove
tecnologie multistrato in ceramica.La
diversa struttura e la particolare
geometria offrono ESL ancora inferiori
ai noti MLCC, anche al di sotto dei 40
pH (LGA). Si tratta di componenti
SMD previsti per applicazioni speciali
(alte frequenze, aerospaziale, ecc.).
Nel caso di CPU microprocessore come quella esemplificata, i consumi del componente possono
sono elevati, da qualche decina a oltre 120 watt. E, trattandosi di tensioni molto basse (5,
3.3, 2,5, 1.8V) le correnti sono particolarmente intense e si ricorre alla realizzazione di
aree di alimentazione on board (VRM - Voltage Regulation Module) in modo da rende quanto
più corte possibili le connessioni tra questi e il processore.
Ad esempio, questo gruppo VRM on-board ad alte prestazioni
per generare le tensioni di core di una CPU AMD AM-3, su
scheda madre ASUS.
Evidente la scelta di utilizzare un sistema di alimentazione
switching polifase con un elevato numero di condensatori,
induttori e MOSFET che aumenta il rendimento e di
conseguenza riduce il calore prodotto dagli elementi di
commutazione. Il parallelo dei condensatori riduce ESR/ESL e
aumenta il picco di corrente erogabile.
Da osservare anche l'evidenziazione dell' uso di condensatori a lungo MTBF (5000 ore): il
costruttore ci tiene a far sapere che non usa bad-cap.
Solitamente circuiti con microcontroller embedded richiedono correnti molto più limitate,
anche perchè la tendenza attuale è quella di minimizzare il consumo energetico, e quindi sono
relativamente semplici da considerare. Le sezioni logiche hanno consumi dell' ordine dei
milliampere, ma particolarmente sensibile diventa, invece, il problema nei circuiti in cui sono
presenti I/O e in cui scorrono correnti impulsive elevate, dell' ordine delle centinaia di milliampere.
Caso comune è la presenza di attuatori di uscita (relè, solenoidi, motori e simili) o LED con correnti
elevate oppure circuiti di PWM su elementi (motori, lampade, riscaldatori, LED, ecc) che
consumano correnti sensibilmente maggiori di quelle della sezione logica.
Qui si rende necessario un disaccoppiamento
consistente, oltre che sui singoli ic, sopratutto tra l'
alimentazione della parte logica e di quella di potenza,
che, attraversate da correnti elevate sono fonte di
rumore elettrico e di transitori anche consistenti.
Si può ricorrere allora a separazioni con reti costituite
da diodo/condensatore o resistenza/induttanza/capacità
per formare filtri RC o LC, che costituiscono una
opposizione alle brusche variazioni di corrente e quindi
si oppone al passaggio di componenti a frequenza elevata.
Si ottiene così la separazione tra gli effetti delle correnti variabili in una sezione da quelle delle
rimanenti, sopratutto se queste ultime sono costituite da circuiti logici o analogici che hanno
sensibilità elevata ai disturbi sulla tensione di alimentazione.
Anche la tecnica di utilizzare stabilizzatori di
tensione separati per ogni sezione del
circuito può risultare molto efficace, in quanto
ogni stabilizzatore dovrà fare fronte alle esigenze
di una solo parte del sistema e potrà essere
dimensionato al meglio.
In sostanza si distribuisce una tensione primaria,
stabilizzata o meno a seconda delle esigenze, e si
provvede alla stabilizzazione e regolazione
"locale" per ogni sezione del circuito.
L' uso di regolatori di dimensioni ridotte al
posto di un grosso sistema di alimentazione, oltre a migliorare il rendimento (meno calore), può
risultare anche un miglioramento per quanto riguarda i costi.
L' esempio visto sopra dei regolatori VRM on board, tipici delle schede madri e delle schede video
PC è un esempio di distribuzione dell' alimentazione: l' alimentatore del PC produce un +12V che
alimenta i singoli VRM dai quali vengono derivate le più varie tensioni, in genere basse tensioni
con late correnti per l' alimentazione delle CPU e GPU. L' elevata efficienza dei VRM, che lavorano
a frequenze anche di MHz, la vicinanza ai carichi e la suddivisione in molte unità consente di
ottenere prestazioni che non sarebbero possibili ad una alimentazione completamente centralizzata.
In ogni è indispensabile l' uso di elementi capacitivi a basso ESR : dato che saranno i
condensatori a fornire le correnti di ripple, la resistenza, in serie con la corrente,
produce una perdita di energia che si riflette in una dV elevata e nella produzione di calore
indesiderato.
In particolare, il parallelo di condensatori consente di avere una corrente di picco pari alla somma
delle singole correnti di picco. Quindi, in generale, è spesso più opportuno, dove si vuole ottenere il
massimo di prestazione, utilizzare un parallelo di condensatori che non un unico elemento di grande
capacità.
Elementi in classe di temperatura 105 °C o 125 °C o più saranno una
scelta migliore che non elementi da 85 °C, mentre sono senz'altro da
sconsigliare condensatori commerciali low cost.
Tra l' altro, questi elementi hanno di norma specificato il valore di ESR e
sono disponibili anche in serie a bassissimo ESR. Inoltre, questi modelli
solitamente hanno una durata di vita più elevata ed una possibilità
di corrente di ripple molto maggiore dei modelli consumer (anche se il
costo è ovviamente superiore).
In particolare, sarà molto opportuno verificare se questa corrente di ripple sostenibile dal
condensatore sia adeguata al carico e far si di scegliere un elemento che abbia un margine
sufficiente rispetto al consumo impulsivo del circuito.
Per queste ragioni sarà anche consigliabile utilizzare più elementi in parallelo rispetto ad un
solo grosso condensatore: la capacità di corrente di ripple viene aumentata, mentre l' ESR viene
diminuita dalla connessione in parallelo.
In generale si può valutare una capacità di 1000 uF (o più) per ampere, ma alcuni modelli di
condensatore consento ripple minori o anche decisamente maggiori ed è opportuna una scelta
oculata, consultando le caratteristiche dei vari modelli, dato che i costi sono molto variabili da
produttore a produttore e da modello a modello. E' normale che nel catalogo di un buon costruttore
di elettrolitici siano disponibili molti modelli con caratteristiche differenti: l' accontentarsi della
scelta di un elemento qualunque non certo la migliore soluzione.
Una breve ricerca permette solitamente di trovare elementi con sufficiente corrente di ripple senza
aumentare drammaticamente le capacità in gioco e quindi limitando anche i costi.
Come ultimo appunto, si deve comunque considerare che un parallelo di condensatori a basso
ESR/ESR potrà fornire sì una levata energia in scarica, ma, proprio grazie ai ridotti parametri
parassitari, richiederà una corrente più intensa al momento iniziale della carica.
Questo fatto va valutato in relazione alla possibilità di picco del sistema di alimentazione, in
particolare riguardo alla corrente che è richiesta a raddrizzatori e regolatori.
Alcune regole generali.
1. Tutti i componenti attivi devono avere condensatori di disaccoppiamento
delle alimentazioni posizionati quanto più vicino possibile ai pin.
2. In generale un multistrato ceramico da 0.1uF è adeguato alle situazioni
comuni. Nel caso di assorbimenti di corrente maggiori va accoppiato un
elettrolitico a basso ESR
.
3. E' preferibile impiegare più condensatori in parallelo piuttosto che un unico
grosso elemento: il parallelo riduce le componenti parassite ESR/ESL mentre
si aumenta la capacità di corrente di ripple.
4. Non tutti i condensatori sono uguali! Verificate se possibile le
caratteristiche dal sito del costruttore ed evitate l' uso di economici elementi
consumer, sopratutto per quanto riguarda elettrolitici in alluminio cilindrici e a
film plastico a scatoletta. Per applicazioni "serie" vanno preferiti elettrolitici
105 °C o meglio, tantalio e ceramica multistrato.
5. Le piste di alimentazione vanno curate per brevità di percorso e superficie
adeguata al passaggio delle correnti richieste dal circuito. Se necessario,
utilizzare basette con rame di spessore maggiore o sovra stagnare i percorsi
ad elevata corrente.
6. Per quanto possibile evitare fili volanti per le alimentazioni. Se necessari
per il collegamento tra l' alimentatore e le schede, posizionare su queste
ultime degli elettrolitici adeguati all' arrivo dei cavi.
7. Mantenere ordine nelle connessioni e non incrociare cavi di segnale con
cavi di alimentazione. Utilizzare cavi schermati e altri sistemi di isolamento
dove necessario separare ingressi sensibili da fonti di disturbo.
8. Dove necessario, separare le alimentazioni della parte logica da quella
analogica.
9. Nel caso di circuiti complessi, utilizzare la distribuzione della tensione
principale non stabilizzata ed installare stabilizzatori locali per ogni sezione.
10. Cura particolare dovrà essere rivolta a circuiti con elevate correnti, fronti di
commutazione rapidi o alte frequenze di funzionamento.
E, in ogni caso, verificare sui siti dei costruttori le caratteristiche dei componenti e i consigli dati
per il loro utilizzo.
Ultima nota: quanto detto ed esemplificato sembra riguardare solamente l' area professionale, le
CPU di Intel o AMD o circuiti complessi che occupano decine di schede. Ma non è così.
Il problema di disaccoppiare le alimentazioni è fondamentale anche per un circuito costituito da
un semplice operazionale o da un PIC e una manciata di LED:
in qualunque situazione in cui si impieghi un qualsiasi componente attivo, op amp,
microcontroller, logica CMOS o regolatore di tensione, condensatori di bypass sono
indispensabili.
L' omettere questi componenti, anche nel più semplice circuito, porta fatalmente ad instabilità e
cattivo funzionamento.
In particolare, se condensatori di disaccoppiamento sono indispensabili nelle realizzazioni su
circuito stampato, ancor più lo sono nel caso di circuiti sperimentali, "volanti" o su breadboard: il
fatto che siano "sperimentali" non impedisce all'assenza dei condensatori nei giusti punti dell'
alimentazione di rendere problematico il funzionamento.
Speriamo che quanto detto in questa breve panoramica permetta di comprendere l' importanza di
una parte, da molti considerata "marginale".