Università degli studi di Modena e Reggio Emilia
Anno Accademico 2005/2006
Tesina di Informatica Industriale su
Forno a microonde / grill
Anna Chierici
Matricola 394
III° anno in corso
Ingegneria Informatica NOD
Indice
1. Descrizione Generale
1.1 Introduzione
1.2 Componenti
1.3 Funzionamento
2.Descrizione dei componenti
2.1 Sistema piatto girevole
2.1.1 Variabili
2.1.2 Function Block
2.1.3 Automa a stati finiti
2.1.3 Diagramma SFC(Sequancial Function Chart)
2.1.4 Linguaggio ST(Structured Text)
2.1.5 Traduzione parziale in linguaggi Ladder Diagram
2.1.6 Traduzione parziale in linguaggio Instruction List
2.2 Sistema di emissione microonde
2.2.1 Variabili
2.2.2 Function Block
2.2.3 Automa a stati finiti
2.2.3 Diagramma SFC(Sequancial Function Chart)
2.2.4 Linguaggio ST(Structured Text)
2.2.5 Traduzione parziale in linguaggi Ladder Diagram
2.2.6 Traduzione parziale in linguaggio Instruction List
2.3 Sistema di sicurezza
2.3.1 Variabili
2.3.2 Function Block
2.3.3 Automa a stati finiti
2.3.3 Diagramma SFC(Sequancial Function Chart)
2.3.4 Linguaggio ST(Structured Text)
2.3.5 Traduzione parziale in linguaggi Ladder Diagram
2.3.6 Traduzione parziale in linguaggio Instruction List
2.4 Logica di supervisione
2.4.1 Pannello di controllo
2.4.2 Variabili
2.4.3 Function Block
2.4.4 Automa a stati finiti
2.4.5 Diagramma SFC(Sequancial Function Chart)
2.4.6 Linguaggio ST(Structured Text)
2.4.7 Traduzione parziale in linguaggi Ladder Diagram
2.4.8 Traduzione parziale in linguaggio Instruction List
2
3.FDB(Function Block Diagram) globali
3.1 interazione tra supervisore e impianto
3.2 collegamenti interni
4.CONCLUSIONE
3
1.Descrizione Generale
1.1 Introduzione
Nell’economia domestica dei giorni nostri il microonde risulta un mezzo essenziale rispondente alla
crescente mancanza di tempo degli utenti.La velocità al pari della silenziosità , della qualità della
cottura e della varietà di programmi sono punti fondamentali nella progettazione di un prodotto
versatile e competitivo in questo campo. L’utilizzo di apparecchi elettrici ,tuttavia , porta a molti
problemi di natura energetica. Fastcook cerca di utilizzare al massimo l’energia generata , questo
tramite particolari soluzioni strutturali e tramite la differenziazione dei programmi di cottura per
adattare l’utilizzo di risorse alla quantità e alla diversa tipologia di cibi che devono essere cotti,
scongelati o semplicemente riscaldati.Sono tanti i vantaggi offerti dalla tecnologia dei forni a
microonde, oltre al risparmio sui tempi. Si tratta infatti di un tipo di cucina più sano in quanto gli
alimenti si cuociono velocemente mantenendo inalterati i propri principi nutritivi e poiché consente
un minor uso di grassi durante la cottura.Anche il gusto è una spetto fondamentale: verdura e frutta
mantengono un sapore più fresco, la polpa di carne e pesce rimane morbida e creme e salse sono
ancora più semplici da cucinare.Nonostante la diffidenza iniziale di alcuni utenti nei confronti di
questa tecnologia ,invisibile all’occhio umano, i forni a microonde stanno conquistando sempre più
il mercato divenendo un prodotto chiave per molte aziende di elettrodomestici.
1.2 Componenti
L’impianto che si andrà ad analizzare si compone di diverse tipologie componenti più un
supervisore che riceve i comandi dall’utente tramite un pannello di controllo.
I principali componenti sono:
- vano e portello del forno con apertura meccanica a scatto
- il sistema per l’emissione di microonde
- una ventola di aspirazione per raffreddare il vano
- un piatto girevole eventualmente sostituito da una apposita griglia
- un supervisore con pannello di comando che controlla anche il sistema di chiusura
di sicurezza e la lampada di illuminazione interna
- un timer per il conteggio dei minuti di cottura trascorsi e uno utilizzato dalla
ventola per conteggiare i secondi di accensione
*i timer e i sensori sono componenti standard il cui meccanismo di controllo non verrà
implementato.
1.3
Funzionamento
L’utente dovrà aprire il forno tirando verso di se il portello e sistemare il cibo nel vano
preventivandosi di aver sistemato correttamente il piatto girevole o il grill. All’apertura si accenderà
automaticamente la lampada di illuminazione del vano.La posizione corretta dei recipienti prevede,
come precedentemente indicato, uno spazio minimo di 2 cm tra essi e le pareti. Le cibarie inoltre
devono essere ben ferme per non correre il rischio di ribaltarsi durante la cottura con il movimento
del piatto sottostante. In tal senso si consiglia di non inserire cibi troppo piccoli nel vano e di usare
appositi contenitori . Inoltre è importante assicurarsi che il piatto girevole sia in grado di ruotare
liberamente senza incontrare ostacoli o essere frenato.Quindi l’utente potrà chiudere lo sportello
selezionare il programma più idoneo(temperatura, tempo, eventualmente tipologia di cibo o/e peso,
opzione di scongelamento o grill, ritardo/ attesa di cottura): la lampada di illuminazione interna del
vano si spegnerà per riaccendersi nell’istante in cui l’utente schiaccerà il pulsante Start. In quel
momento il timer verrà settato all’orario richiesto dal programma selezionato e comincerà a
4
decrementare , contemporaneamente il controllore accenderà il motore del piatto girevole e le
lampade cominceranno ad emettere microonde aumentandone la potenza fino a quella richiesta e
mantenendola tale durante l’intero intervallo di cottura. Alla fine del periodo di cottura il
supervisore provvederà a spegnere le lampade ad emissione di microonde e ad azionare una ventola
per consentire lo scambio di aria con l’esterno.
Allo scattare a zero del timer la luce interna di illuminazione del vano si spegne e l’utente può
riaprire il vano ed estrarre il cibo .Nel caso in cui l’utente apra il portello prima della fine del
programma sono state inserite misure di arresto critico per fermare in sicurezza l’impianto. In ogni
caso è consigliato all’utente di fare tale manovra solo ed esclusivamente in casi d’emergenza
(premendo l’apposito pulsante di ferma cottura sul pannello prima di aprire il portello) e non
usualmente perché potrebbe portare a rovinare le strutture dell’impianto stesso.
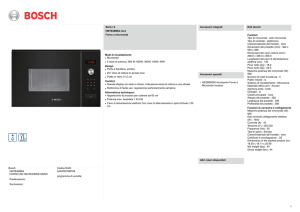
fig.1
1.Apertura portello
2.Finestra del forno
3.Sistema di chiusura di sicurezza del portello
4.Prese d’aria
5.Pannello di controllo
6.Vassoio di vetro
7.Anello rotante
8.Prese d’aria esterne
9.Griglia
Le microonde sono prodotte dal magnetron , un particolare tubo in metallo, che installato
all’interno del forno e portato a temperatura sufficientemente alta trasforma l’energia elettrica in
onde elettromagnetiche ad altissima frequenza. Tali onde convogliate nel vano del forno attraverso
una condotta detta guida d’onda vengono lanciate in tutte le direzioni venendo a colpire le molecole
d’acqua e di grasso contenute negli alimenti, così da provocarne l’oscillazione.Tale movimento
causa attrito in tutti gli strati della vivanda che velocemente si riscalda permettendo di limitare l’uso
di oli e grassi e impedendo ai cibi di bruciarsi o attaccarsi al tegame. Le microonde però hanno la
caratteristica di essere riflesse dai metalli e vengono quindi proiettate dal rivestimento interno del
forno sui contenitori dei cibi che devono rigorosamente essere di vetro, carta, plastica o porcellana.
5
Questi materiali sono come invisibili alle onde e le lasciano passare senza assorbirle ne
surriscaldarsi. Il forno a microonde permette per tanto un grande risparmio energetico poiché
l’aumento di temperatura riguarda direttamente ed esclusivamente l’alimento, senza che sia
necessario riscaldare prima il recipiente che lo contiene.
Per quanto riguarda la sicurezza, sportello e pareti del forno sono schermati in modo da non lasciare
uscire le microonde all’esterno, mentre una apposito congegno ne blocca istantaneamente
l’irradiamento al momento dell’apertura del forno. Come tutti i modelli più recenti Fastcook esegue
automaticamente le operazioni di riscaldamento , scongelamento e cottura degli alimenti
suggerendo la sequenza da compiere mediante display digitali, timer e tastiere.
Fastcook permette anche la cottura combinata utilizzando ad esempio il grill.Con questo tipo di
associazione la cottura delle pietanze è provocata dall’incandescenza di una griglia posizionata nella
parte alta del vano e dall’irradiamento delle microonde.
Il forno è infine fornito di un piatto girevole che , ruotando automaticamente espone gli alimenti
alle microonde in modo omogeneo, migliorandone la cottura.La rotazione del piatto non può essere
fermata si sconsiglia pertanto introdurre nel forno grossi contenitori di forma rettangolare(si
danneggerebbe il dispositivo di rotazione esercitando su di esso un blocco).
6
2.Descrizione dei componenti
2.1 Sistema piatto girevole
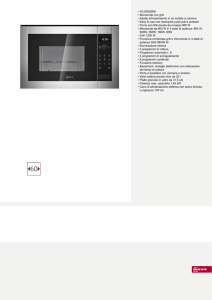
fig.2
1.piatto rotante
2.sistema ad incastro
3.anello rotante
4.sensore di peso
5.sensore incastro corretto
6.sensore di movimento
7.sensori grill
8.griglia
Il sistema è costituito da un vassoio rotante in vetro, da un sistema ad incastro collegato ad un
motore che ne assicura il movimento, da un anello rotante su cui è appoggiato il piatto così da
guidarne il movimento tenendolo sollevato dal ripiano inferiore del vano.La griglia, se utilizzata,
deve essere inserita sopra al piatto negli appositi incastri. I sensori indicheranno automaticamente la
sua presenza al supervisore e all’intero sistema . La lampada interna di illuminazione viene accesa
durante il funzionamento del sistema piatto rotante.Le principali situazioni di errore sono quando il
piatto non è inserito correttamente nell’incastro, quando il piatto non riesce a ruotare a causa di
ostacoli , quando il piatto è fatto girare senza alcun peso sopra di esso oppure quando il grill non è
inserito correttamente.In questi casi si dovrà fermare il piatto e la cottura in generale e segnalare
all’utente che c’è un errore nel sistema piatto rotante.
7
2.1.1 Variabili
Variabili in entrata
Nome
PON
POFF
SP
Tipo
BOOL
BOOL
BOOL
SI
BOOL
SM
BOOL
SG1
BOOL
SG2
BOOL
SG3
BOOL
Descrizione
Segnale d’accensione
Segnale di spegnimento
True rileva il peso di un cibo sul piatto
False piatto vuoto
True incastro corretto
False incastro non corretto
True piatto in rotazione
False piatto fermo
True primo supporto della griglia inserito
False primo supporto della griglia non inserito
True secondo supporto della griglia inserito
False secondo supporto della griglia non inserito
True terzo supporto della griglia inserito
False terzo supporto della griglia non inserito
Variabili interne e costanti
Nome
Err1
Tipo
BOOL
Grilloff
BOOL
Descrizione
True errore sui piedi della griglia
False situazione corretta dei piedi della griglia
True griglia non in funzione
False griglia in funzione
Variabili in uscita
Nome
Perr
Tipo
BOOL
Gerr
BOOL
P_mot
Lamp
(0,2)
BOOL
Descrizione
True errore sul piatto
False situazione corretta
True errore sul Grill
False situazione corretta
Motore di rotazione, può avere velocità 0(fermo), 1 o 2
True Lampada di illuminazione interna del vano accesa
False Lampada di illuminazione interna spenta
8
2.1.2 Function Block
fig.3
2.1.2 Automa a stati finiti
fig.4
Descrizione stati
Nome stato
Off
On
Min
Max
Errore
Descrizione
Blocco funzionale spento
Blocco funzionale in preparazione all’accensione
Accensione con velocità minima
Accensione con velocità massima
Rilevato errore di malfunzionamento
9
Condizioni di transizione degli stati
c1:= PON
c2:= POFF (* Il POFF ha la precedenza su tutti i segnali e spegne istantaneamente il sistema
indipendentemente dallo stato in si trova*)
c3:= SG1 and SG2 and SG3 and SI and not POFF (* Essendo inserita la griglia non controlliamo il
peso sul piatto con SP*)
c4:= True (*Dopo un ciclo ritorno allo stato di off spegnendo il sistema e fermando la rotazione *)
c5:= (not SG1) and (not SG2) and (not SG3) and SP and SI and not c2
c6:= Not SP or not SI or ((not SG1 or not SG2 or not SG3) and not((not SG1) and (not SG2) and
(not SG3))) and not c2
c7:=POFF
c9:= Not SM and not POFF
c8:= Not SM or ((not SG1 or not SG2 or not SG3) and not ((not SG1) and (not SG2) and (not
SG3))) and not POFF
c10:= POFF
2.1.3 Diagramma SFC(Sequential Function Chart)
fig.5
10
2.1.9 Linguaggio ST (Structured Text)
VAR_INPUT(*Definizione variabili di input*)
PON,POFF,SP,SI,SM: BOOL;
SG1,SG2,SG3: BOOL;
END_VAR
VAR(*Definizione variabili interne*)
Err1,GrillOff: BOOL;
END_VAR
VAR_OUTPUT (*Definizione variabili di uscita*)
PErr , GErr, Lamp: BOOL;
P_mot: (0..2)
END_VAR
ACTION Funz Comb (*Azione Funzione Combinatoria*)
Err1:= not SG1 or not SG2 or not SG3;(* segnala un cattivo inserimento della griglia o il non
inserimento* )
Grilloff:= (not SG1) and (not SG2) and (not SG3); (*segnala se la griglia non è presente*)
IF OFF.X THEN c1:= PON;
ELSEIF ON.X THEN c2:= POFF; c3:= (SG1 and SG2 and SG3) and SI and (not POFF);
c5:= Grilloff and SP and SI and (not POFF);
c6:= (Not SP or not SI or (Err1 and not(Grilloff))) and (not POFF);
(*errore di mancato inserimento del cibo o sbagliato inserimento del piatto nell’incastro o
errore nella sistemazione della griglia*)
ELSEIF MIN.X THEN c8:= (Not SM or (Err1 and not (Grilloff))) and (not POFF);
(*piatto fermo a causa di un oggetto estraneo o griglia che esce dai supporti*)
c10:= POFF;
ELSEIF MAX.X THEN c7:=POFF;c9:= Not SM and not POFF;
ELSEIF ERRORE.X THEN c4:= True;
END_IF
END_ACTION
ACTION A1 (*Piatto Fermomotore alla velocità 0 , lampada spenta e errori settati a False*)
P_mot: = 0;
Lamp: = False;
PErr : = False;
GErr : = False;
END_ACTION
ACTION A2
P_mot: = 0;
PErr : = False;
GErr : = False;
Lamp: = True; (*Accensione della lampada*)
END_ACTION
ACTION A3
P_mot: = 1;(*Motore a velocità 1*)
Lamp: = True;(*lampada accesa*)
11
PErr : = False;
GErr : = False;
END_ACTION
ACTION A4
P_mot: = 2; (*Motore a velocità 2*)
Lamp: = True;
PErr : = False;
GErr : = False;
END_ACTION
ACTION A5(*in caso di errore*)
P_mot: = 0;(*spegniamo il motore e la lampada*)
Lamp: = False;
PErr: = Not SP or not SI or not SM ;(*Segnaliamo gli errori*)
GErr: = Err1 and not Grilloff ;
END_ACTION
2.1.5 Ladder Diagram: Action Funz Comb
fig.6
12
fig.7
fig.8
13
fig.9
fig.10
fig.11
14
2.1.6 Instruction List:Action Funz Comb
LD N SG1
OR N SG2
OR N SG3
ST ERR1
LD N SG1
AND N SG2
AND N SG3
ST GrillOff
LD OFF.X
EQ true
JMPC OFF
LD ON.X
EQ true
JMPC ON
LD MIN.X
EQ true
JMPC MINIMO
LD MAX.X
EQ true
JMPC MASSIMO
LD ERRORE.X
EQ true
JMPC ERRORE
OFF:
LD PON
ST C1
RET
ON:
LD POFF
ST C2
LD SG1
AND SG2
AND SG3
AND SI
AND N POFF
ST C3
LD GrillOff
AND SP
AND SI
AND N POFF
ST C5
LD Err1
AND N GrillOff
OR SP
OR SI
AND N POFF
ST C6
15
RET
MINIMO:
LD POFF
ST C10
LD Err1
AND N GrillOff
OR N SM
AND N POFF
ST C8
RET
MASSIMO:
LD POFF
ST C7
LD N SM
AND N POFF
ST C9
RET
ERRORE:
LD True
ST C4
RET
16
2.2 Sistema di emissione microonde
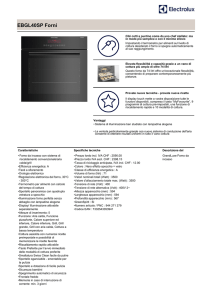
fig.12
1.
2.
3.
4.
5.
microonde
guida d’onda
sensore di potenza
sensore di potenza
tubo di magnetron
6. secondo tubo di magnetron
7. circuito elettrico (tensione di alimentazione)
8. bloccaggio emissione
Il magnetron è un tipo di valvola termoionica (tubo a vuoto) ad alta potenza destinata alla
produzione di microonde . La valvola termoionica (o tubo a vuoto) è un componente elettronico
"attivo" . Per "attivo" si intende un componente che, grazie ad una fonte esterna di energia, è in
grado di innalzare la potenza di un segnale posto al suo ingresso. Il suo funzionamento di massima è
abbastanza semplice: la corrente passa fra due elettrodi( l'anodo ed il catodo). A seconda della
tensione a cui è sottoposto , il catodo, terminale negativo, emette elettroni per effetto termoionico,
cioè per riscaldamento. L'effetto termoionico, detto anche effetto termoelettronico, è l'emissione
di elettroni da parte di un materiale (tipicamente un metallo) che si riscalda a seguito del passaggio
di una corrente elettrica. L'emissione degli elettroni avviene perché questi ultimi acquistano, in virtù
del riscaldamento del materiale, un'energia termica superiore alla lavoro di estrazione di quel dato
materiale.
Il magnetron è costituito da una camera con sezione circolare circondata da lobi, in cui è stato
effettuato il vuoto. Al centro è collocato un filo mantenuto incandescente, il catodo, e ad un
potenziale elettrico negativo molto elevato, costante o impulsivo. Parallelamente all'asse della
camera è mantenuto un campo magnetico prodotto da un magnete permanente.Gli elettroni messi
per effetto termoionico dal filamento tendono a muoversi verso le pareti della camera, mantenute a
potenziale zero, che costituiscono l'anodo. La presenza del campo magnetico però causa una
curvatura nella loro traiettoria , portandoli a seguire un percorso a spirale.Sul perimetro della
17
camera sono ricavate delle aperture opportunamente spaziate e comunicanti con delle cavità. Gli
elettroni, raggiungendo il bordo delle cavità si riuniscono in fasci che vibrano e producono un
campo elettromagnetico ad alta frequenza.Una parte di questo campo è prelevato da una speciale
antenna connessa ad una guida d'onda (un tubo metallico in grado di convogliare le microonde), e
da questa inviato al carico utilizzatore, che nel nostro caso sarà la camera del forno a microonde .
Il moto che un elettrone uscente dal filo centrale avrebbe in assenza di campo magnetico è riportato
in blu , mentre quello che assume all'interno del magnetron in rosso. Le frecce verdi rappresentano i
campi elettrico (freccia corta) e magnetico (freccia circolare) che si instaurano nel circuito
equivalente alla cavità.
fig.13
La dimensione delle cavità determina la frequenza di risonanza e quindi la frequenza delle onde
radio prodotte. Questa frequenza non è molto precisa né modificabile. Questo non è un problema
nelle applicazioni tipiche del magnetron, quali la cottura dei cibi . La potenza irradiata dipende dalla
tensione applicata e dalle caratteristiche costruttive del tubo.Nel forno a microonde la guida d'onda
si collega con la camera di cottura attraverso una finestra chiusa da un materiale trasparente alle
microonde, che ha la funzione di proteggere il magnetron dalla sporcizia. Le microonde vengono
quindi assorbite da diversi materiali tra cui l'acqua contenuta nei cibi, trasformandosi in calore.Se le
onde non vengono assorbite subiscono una riflessione. Le onde che si creano, dissipano la loro
energia innescando un arco in prossimità dell'antenna del magnetron. Per questo motivo è
importante non fare funzionare il forno a vuoto. I rischi dovuti all'utilizzo del magnetron sono quelli
legati all'esposizione alle microonde, poiché i fasci sono invisibili e possono riflettersi in modo
insidioso.Un altro pericolo associato al magnetron è costituito dalla elevata tensione di
funzionamento.
Nel nostro caso il sistema ad emissione consiste delle parti seguenti:
Due tubi di magnetron
un circuito elettronico di controllo e alimentazione del magnetron,
una guida d'onda
una camera di cottura.
18
Il magnetron, alimentato ad alta tensione genera un flusso di microonde, normalmente alla
frequenza di 2450 MHz (lunghezza d'onda di 12,24 cm) con una potenza solitamente compresa tra
800 e 1000 watt, che la guida d'onda invia alla camera di cottura. L'acqua, i grassi e i carboidrati
che costituiscono il cibo assorbono l'energia delle microonde in un processo chiamato
riscaldamento dielettrico.Molte molecole sono essenzialmente dei dipoli, ovvero hanno una
estremità con carica elettrica positiva e un'altra con carica negativa, e sono per questo trascinate dal
campo elettrico alternato delle microonde e indotte a vibrare. Questo rapido movimento genera
calore. Le microonde riscaldano con più efficienza l'acqua, ma anche in misura minore grassi,
zuccheri e ghiaccio.
La camera di cottura impedisce la fuoriuscita di microonde. Il portello del forno è di vetro per
permettere la visione dell'interno, ma include uno strato di rete metallica fine come schermo
elettromagnetico. Poiché la larghezza delle maglie è inferiore alla lunghezza d'onda delle microonde
di 12cm, la radiazione non può attraversare la rete, mentre la luce, con lunghezza d'onda molto più
piccola delle maglie può passare.Il magnetron deve essere alimentato con un tensione in corrente
continua di diverse migliaia di volt. Questa tensione viene prodotta a partire dalla tensione della rete
elettrica.
Sebbene il nostro forno preveda la regolazione della potenza di cottura, il magnetron viene fatto
funzionare sempre a pieno regime per mantenere al massimo l'efficienza. La modulazione della
potenza viene fatta regolando il rapporto tra il periodo di accensione ed il periodo di spegnimento,
secondo una tecnica chiamata modulazione di larghezza di impulso. Per ottenere ad esempio una
potenza pari alla metà di quella massima si accende il magnetron per la metà del tempo.
In un forno a microonde non tutta l'energia elettrica assorbita è convertita in microonde.Il nostro
forno domestico assorbe 1100 W producendo 800 W di microonde. I rimanenti 300 W sono
dissipati come calore dai componenti del forno, principalmente dal magnetron, che è raffreddato da
una ventola. Minori perdite sono dovute alla lampadina di illuminazione del forno, al trasformatore
di alimentazione, la stessa ventola di raffreddamento, il motore del piano rotante e i vari circuiti di
controllo. Normalmente l'energia a microonde generata dal magnetron viene tutta assorbita dai cibi
in cottura. Se la camera di cottura è vuota o contiene troppo poco cibo, l'energia ritorna al
magnetron, che può surriscaldarsi, danneggiarsi, e costituire un possibile principio di incendio. Per
questo motivo si deve evitare di accendere il forno vuoto.
2.2.1 Variabili
Variabili in entrata
Nome
M_GO
STOP
Potenza
S_Pot1
S_Pot2
Time
Tipo
BOOL
BOOL
INT*
INT
INT
TIME
Descrizione
Segnale d’accensione
Segnale di spegnimento
Potenza indicata dal supervisore al sistema emissione
Sensore, rileva la potenza corrente del tubo magnetron n°1
Sensore, rileva la potenza corrente del tubo magnetron n°2
Tempo previsto di cottura
*I valori ammessi di potenza per questo modello sono 800W,600W,400W, 200W,100W
19
Variabili interne e costanti
Nome
EndOn
Tipo
BOOL
TimeOn
Tensione
TIME
REAL
Descrizione
True Fine del tempo effettivo di accensione
Falsetempo effettivo di accensione non ancora trascorso
Tempo effettivo di accensione
Tensione settata sul filo
Variabili in uscita
Nome
Errore
Tipo
BOOL
Risc
BOOL
Ventola
BOOL
Bloccaggio
BOOL
Descrizione
True Errore sui tubi magnetron
False Situazione corretta
True Riscaldatore dei fili interni acceso
False Riscaldatore spento
True Ventola per il raffreddamento del magnetron accesa
FalseVentola spenta
True Sistema di bloccaggio attivato
FalseSistema di bloccaggio non attivo
2.2.1 Function Block
fig.14
20
2.2.2 Automa a stati finiti
fig.15
Descrizione stati
Nome stato
OFF
LOAD
GO
UNLOAD
ERR
Descrizione
Blocco funzionale spento
Blocco funzionale in caricamento
Accensione
Blocco funzionale in scaricamento
Rilevato errore di malfunzionamento
Condizioni di transizione degli stati
c1:= M_GO
c2:= (S_Pot1 > 800) and (S_Pot2 > 800) and (not c4) and (not c6)
c3:= (EndOn or STOP) and (not c7)
c4:= STOP and (not c6)
c5:=(S_Pot1= 0) and (S_Pot2=0)
c6:=((Tensione>2000)and (S_Pot1= 0)) or ((Tensione>2000)and (S_Pot2= 0))
(* Errore di mancata accensione del magnetron*)
c7:= (S_Pot1>1100)or (S_Pot2>1100) (* Errore di sovraccarico*)
c8:= True (* Dopo un ciclo passiamo allo stato seguente*)
21
2.2.3 Diagramma SFC(Sequential Function Chart)
fig.16
2.2.4 Linguaggio ST(Structured Text)
VAR_INPUT
M_GO,STOP: BOOL;
Potenza 800,600, 400, 200 ,100 );
S_Pot1,S_Pot2:INT;
END_VAR
VAR
Tensione:REAL;
EndOn: BOOL;
TimeOn: TIME;
END_VAR
VAR_OUTPUT
Errore,Risc:BOOL;
Ventola,Bloccaggio: BOOL;
END_VAR
22
ACTION Funz Comb
If OFF.X THEN c1:= M_GO;
ELSEIF LOAD.X THEN c6:=((Tensione>2000)and (S_Pot1= 0)) or ((Tensione>2000)and
(S_Pot2= 0));(*la tensione sale oltre la soglia ma i tubi di magnetron
non si sono accessi*)
c4:= STOP and (not c6) ;
c2:= (S_Pot1 > 800) and (S_Pot2 > 800)and (not c4) and (not c6);
(*Raggiunta la potenza standard di cottura*)
ELSEIF GO.X THEN c7:= (S_Pot1>1100)or (S_Pot2>1100);(*potenza oltre i limiti di
sicurezza*)
c3:= (EndOn or STOP)and not c7;
ELSEIF UNLOAD.X THEN c5:=(S_Pot1= 0) and (S_Pot2=0);(*Scaricamento dei tubi
completato*)
ELSEIF ERR.X THEN c8:= True;
END_IF
END_ACTION
ACTION A1(*Sistema a microonde spento *)
Tensione:=0;
EndOn:=False;
TimeOn:=0;
Errore:=False;
Ventola:=False;
Risc:=False;
Bloccaggio:=True;(*Impianto a microonde bloccato e in sicurezza*)
END_ACTION
ACTION A2(*Inizializzo il caricamento*)
Tensione:=1000; (*porto la tensione a 1000V*)
EndOn:=False;
TimeOn:=0;
Errore:=False;
Ventola:=False;
Risc:=True; (*accendo il riscaldatore del filo interno al magnetron*)
Bloccaggio:=False;(*Sblocco il sistema*)
END_ACTION
ACTION A2bis (*Aumento la tensione ogni ciclo fino al raggiungimento della potenza critica*)
Tensione:=Tensione+500;
END_ACTION
ACTION A3(*Inizializzo la variabile tempo effettivo di cottura*)
EndOn:=False;
TimeOn:=Time* Potenza / 800;
Errore:=False;
Ventola:=False;
Risc:=True;
Bloccaggio:=False;
END_ACTION
23
ACTION A4(*ad ogni ciclo controllo se il tempo effettivo è trascorso*)
IF (GO.T TimeOn)THEN EndOn:=True;(*in tal caso do il segnale di fine stato di ON*)
END_ACTION
ACTION A5(*scarico i tubi di magnetron*)
Tensione:=0;(*azzero la tensione*)
EndOn:=False;
TimeOn:=0;
Errore:=False;
Ventola:=True;(*aziono la ventola*)
Risc:=False;(*spengo il riscaldatore del filo*)
Bloccaggio:=True; (*rimetto l’impianto in sicurezza*)
END_ACTION
ACTION A6(*stato di pericolo*)
Errore:=True;(*segnalo l’errore*)
Bloccaggio:=True; (*Blocco l’impianto che verrà scaricato al ciclo seguente passando allo stato
di unload*)
END_ACTION
2.2.5 Ladder Diagram: Action Funz. Comb.
fig.17
24
fig.18
fig.19
25
fig.20
26
fig.21-22
2.2.6 Instruction List: Action Funz. Comb.
LD OFF.X
EQ true
JMPC OFF
LD GO.X
EQ true
JMPC GO
LD LOAD.X
EQ 1
JMPC LOAD
LD UNLOAD.X
EQ true
JMPC ULD
LD ERR.X
EQ true
JMPC ERR
OFF:
LD M_GO
ST C1
RET
LOAD:
27
LD Tensione
GT 2000
ST T3
LD S_Pot1
EQ 0
ST T4
LD S_Pot2
EQ 0
ST T5
LD T3
AND T4
ST TEST
LD T3
AND T5
OR TEST
ST C6
LD STOP
AND N C6
ST C4
LD S_Pot1
GT 800
ST T1
LD S_Pot2
GT 800
ST T2
LD T1
AND T2
AND N C6
AND N C4
ST C2
RET
GO:
LD S_Pot1
GT 1100
ST T1
LD S_Pot2
GT 1100
ST T2
LD T1
OR T2
ST C7
LD EndOn
OR STOP
AND N C7
ST C3
RET
ULD:
LD S_Pot1
EQ 0
28
ST T1
LD S_Pot2
EQ 0
ST T2
LD T1
AND T2
ST C5
RET
ERR:
LD True
ST C8
RET
29
2.3 Sistema di sicurezza
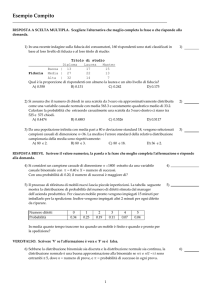
fig.23
1.Apertura portello
2.Finestra del forno
3.Sistema di chiusura di sicurezza del portello
4.Prese d’aria superiore
5.Sensore controllo temperatura pareti
6.Sensore controllo temperatura vetro
7.Sensore controllo temperatura sistema emissione
8.Prese d’aria inferiore
9.Sensore controllo temperatura sistema piatto- rotante
I rischi dovuti all'utilizzo del magnetron sono quelli legati all'esposizione alle microonde. La
sperimentazione su apparati impieganti il magnetron richiede particolari attenzioni e preparazione,
poiché i fasci di microonde sono invisibili e possono riflettersi in modo insidioso.
Come precedentemente accennato, la camera di cottura impedisce la fuoriuscita di microonde.
Il portello del forno è di vetro per permettere la visione dell'interno, ma include uno strato di rete
metallica fine come schermo elettromagnetico. Poiché la larghezza delle maglie è inferiore alla
lunghezza d'onda delle microonde, la radiazione non può attraversare la rete, mentre la luce, con
lunghezza d'onda molto più piccola delle maglie può passare.Il meccanismo di chiusura del portello
include speciali interruttori che attraverso opportune segnalazioni provvedono a far spegnere il
magnetron in caso di apertura accidentale o meno.Se la camera di cottura è vuota o contiene troppo
poco cibo, l'energia ritorna al magnetron o si disperde sulle altre componenti(pareti, vetro o sistema
di rotazione) che possono surriscaldarsi, danneggiarsi, e costituire un possibile principio di
incendio. Per questo motivo si deve evitare di accendere il forno vuoto.
30
Più di ogni altro elettrodomestico, il forno a microonde presenta gravi insidie al suo interno, ed è
assolutamente da evitare l'apertura ed ogni tentativo di riparazione se non a tecnici specificamente
preparati. Il portello del forno incorpora speciali interruttori che spengono immediatamente il forno
in caso di apertura. Per nessun motivo questi interruttori devono essere esclusi o manomessi. Non
fare funzionare il forno privato dei pannelli di chiusura o con il portello rotto.
2.3.1 Variabili
Variabili in entrata
Nome
Apri
S_Open
Tipo
BOOL
BOOL
T1
T2
T3
T4
REAL
REAL
REAL
REAL
Descrizione
Segnale prodotto dall’utente nel voler aprire il forno
True forno aperto
False forno chiuso
Sensore che rileva la temperatura delle pareti del vano
Sensore che rileva la temperatura della finestra del forno
Sensore che rileva la temperatura del sistema di emissione
Sensore che rileva la temperatura del sistema piatto-rotante
Variabili interne e costanti
Nome
Tmax_vetro
Tmax_motor
Tmax_int
Stato
Tipo
REAL
REAL
REAL
0,1
Descrizione
Valore della temperatura massima consentita sul vetro *
Valore della temperatura massima consentita sui motori*
Valore della temperatura massima consentita nel vano*
Variabile che conserva lo stato precedente all’apertura
0 Il microonde era chiuso e spento prima dell’apertura
1 Il microonde era chiuso e aperto prima dell’apertura
* tali valori sono forniti in seguito a sperimentazioni del produttore e sono quindi variabili
all’interno del controllo a seconda delle decisioni della distribuzione, i valori forniti nel seguente
controllo saranno settati solo a titolo di esempio.
Variabili in uscita
Nome
Ranger
Tipo
BOOL
Aria1
BOOL
Aria2
BOOL
Blocco
BOOL
Ventola
BOOL
Descrizione
True situazione pericolosa
False situazione corretta
True presa d’aria superiore aperta
False presa d’aria superiore chiusa
True presa d’aria inferiore aperta
False presa d’aria inferiore chiusa
True blocco apertura portello attivo
False blocco apertura portello non attivo
True accensione ventola di raffreddamento
False spegnimento ventola
31
2.3.2 Function Block
fig.24
2.3.3 Automa a stati finiti
fig.25
Descrizione stati
Nome stato Descrizione
Close Off
Forno chiuso e spento
Open
Forno aperto
Close On
Forno chiuso e acceso
32
Condizioni di transizione degli stati
c1:= Apri
c2:= (not S_Open) and (Stato=0)
c3:= Apri and not c5 (*Richiesta dell’utente di apertura del forno durante la cottura*)
c4:= (not S_Open) AND (Stato=1)
c5:=(T1>Tmax_int )or (T2>Tmax_vetro )or (T3>Tmax_motor) or (T4>Tmax_motor)
(*errore di temperatura eccessivamente alta in una parte del forno*)
2.3.3 Diagramma SFC(Sequencial Function Chart)
fig.26
2.3.4 Linguaggio ST (Structured Text)
VAR_INPUT
Apri,S_Open: BOOL;
T1,T2,T3;T4:REAL ;
END_VAR
33
VAR
Tmax_vetro,Tmax_vano: REAL; (*costanti stabilite dalla casa di produzione *)
Tmax_motor: REAL;(*costanti stabilite dalla casa di produzione *)
Stato: (0,1);
END_VAR
VAR_OUTPUT
Danger,Aria1,Aria2:BOOL;
Ventola,blocco: BOOL;
END_VAR
ACTION Funz Comb
IF Close Off.X THEN c1:= Apri;
ELSEIF OPEN.X THEN c2:= (not S_Open) and (Stato=0); c4:= (not S_Open) AND (Stato=1);
ELSEIF Close On.X THEN c5:=(T1>Tmax_int )or (T2>Tmax_vetro )or (T3>Tmax_motor) or
(T4>Tmax_motor); c3:= Apri and not c5;
END_IF
END_ACTION
ACTION A1 (*stato di chiuso e spento*)
Blocco:=False;(*apertura sbloccata*)
IF (stato=1) THEN Danger:=True; Aria1:=True;Aria2:=True;Ventola:=True; Stato:=0;
(*se arrivo da close on vuol dire che si è verificato un problema di temperatura, quindi accendo le
prese d’aria e la ventola, infine aggiorno la variabile Stato *)
ELSE Danger:=False;Aria1:=False; Aria2:=False;Ventola:=False;
END_IF
END_ACTION
ACTION A2(*stato di aperto*)
Blocco:=False;
IF (stato=1) THEN Danger:=True; (*è stato aperto il forno durante la cottura, c’è pericolo di
dispersione di microonde, lo segnala e toccherà al supervisore dare l’ordine di spegnere e
mettere in sicurezza l’impianto*)
ELSE Danger:=False;
END_IF
Aria1:=False;
Aria2:=False;
Ventola:=False;
END_ACTION
ACTION A5(*stato di chiuso e in funzione*)
Blocco:=True;(*blocco apertura attivato*)
Stato:=1;(*aggiorno la variabile stato*)
Aria1:=False;
Aria2:=False;
Ventola:=False;
END_ACTION
34
2.3.5 Ladder Diagram :Action A1
fig.27
fig.28
35
fig.29
2.3.6 Instruction List :Action A1
LD False
ST Blocco
LD stato
EQ 1
JMPC ON Pericolo
LD stato
EQ 0
JMPC ON NonPericolo
LD 0
ST stato
Pericolo :
LD True
ST Danger
ST Aria1
ST Aria2
ST Ventola
RET
NonPericolo :
LD False
ST Danger
ST Aria1
ST Aria2
ST Ventola
RET
36
2.4 Logica di supervisione
2.4.1 Pannello di controllo
fig.30
1.Display
2.Pulsanti timer
3.Pulsante scongelamento automatico
4.Pulsante potenza microonde
5.Spia di posizionamento della griglia
6.Pulsante potenza con grill
7.Pulsante di riscaldamento/ cottura automatici in base al peso
8.Pulsanti selezione peso
9.Pulsante ritardo/attesa
10.Pulsante orologio
11.Pulsante regolazione peso 10 grammi
12.Pulsante d’inizio (per avviare il forno o riprendere la cottura)
13.Annulla programmazione (premere una volta prima della cottura), fermare cottura
(premere una volta durante la cottura), cancellare le istruzioni(premere una seconda volta
sempre durante la cottura)
37
Il pannello di controllo è formato da :
- un display che mostrerà i valori selezionati coi tasti e il tempo mancante alla fine
della cottura
- pulsanti timer da 10minuti, 1 minuto, 10 secondi,1 secondo per comporre il tempo
desiderato tramite un metodo additivo (per comporre ad esempio 11 minuti e 32
secondi si dovrò schiacciare una volta il pulsante da 10 minuti, una volta quello da 1
minuto,3 volte quello da 10 secondi e due volte quello da un secondo, l’ordine è
ininfluente)
- Pulsante di scongelamento automatico.Imposta automaticamente la potenza a 100 W
se schiacciato una volta (potenza ideale per lo scongelamento delle carni o del
pesce).Se schiacciato due volte imposta la potenza a 200W ( potenza raccomandata
per lo scongelamento del pane)
- Pulsante di potenza del microonde per impostare la potenza desiderata.Ogni volta
che si schiaccia la potenza selezionata passa da 800W a 600W a 400W a 200W a
100w per poi tornare 800W ( quindi per selezionare 600W basta schiacciare due
volte il pulsante di selezione della potenza)
- Spia grill.Si accende nel caso sia stata selezionato un tipo di cottura per griglia.
- Potenza consigliata con la presenza della griglia. Se schiacciato e la griglia è
correttamente inserita diminuisce di un livello la potenza precedentemente
selezionata,in quanto con la presenza della griglia la temperatura necessaria a
cuocere i cibi è minore
- Pulsante riscaldamento/cottura di cibi prestabiliti. Può essere premuto da una a sette
volte (se di più si ricomincia il ciclo). Seleziona una coppia prestabilita di
temperatura e tempo a seconda del cibo selezionato. Ad esempio per cucinare tra i
500 g di pesce(il peso verrà selezionato nel pulsante selezione peso) sono stati
prestabiliti una cottura di 10 minuti a 600W.Per attivarla basterà schiacciare due
volte il pulsante riscaldamento cottura e selezionare un peso pari a 500g.
- Pulsanti di selezione peso. Servono nel caso di cottura automatica per specificare il
peso della quantità di cibo che si vuole cuocere. Ci sono due pulsanti: la freccia
verso l’alto indica l’aggiunta di 10 g di peso, la freccia verso il basso la diminuzione
di 10 g di peso.
- Pulsante ritardo/attesa. Per posticipare di un certo tempo l’inizio della cottura.
- Pulsante orologio.Visualizza l’ora. E’ collegato ad un componente orologio digitale
standard.
- Pulsante d’inizio (per avviare il forno o riprendere la cottura)
- Pulsante di fine : annulla la programmazione se viene premuto una volta prima
dell’inizio della cottura, ferma la cottura se viene premuto una volta durante la
cottura, cancella le istruzioni se viene premuto una seconda volta sempre durante la
cottura.
38
2.4.2 Variabili
Variabili in entrata
Nome
VIA
Tipo
BOOL
ALT
BOOL
Err1
BOOL
Err2
BOOL
Err3
BOOL
Tempo1
INT
Tempo2
INT
Tempo3
INT
Tempo4
INT
SCONG
BOOL
POT
INT
POT GRILL
BOOL
AUT
INT
PesoPiù
INT
PesoMeno
INT
Ritardo
BOOL
Ora
BOOL
Descrizione
True l’utente ha dato il via alla cottura
False l’utente non ha ancora fornito il via
True ferma la cottura o annulla la programmazione
False nessun segnale di alt
True Errore sul sistema ad emissione di microonde
FalseSituazione corretta di funzionamento
True Errore rilevato dal sistema di sicurezza
False Situazione corretta di funzionamento
True Errore sul sistema piatto girevole o sulla griglia
False Situazione corretta di funzionamento
Segnala il numero delle volte che è stato premuto il pulsante
da10 minuti del tempo
Segnala il numero delle volte che è stato premuto il pulsante
da 1 minuto del tempo
Segnala il numero delle volte che è stato premuto il pulsante
da 10 secondi del tempo
Segnala il numero delle volte che è stato premuto il pulsante
da 1 secondo del tempo
True E’ stato premuto il pulsante scongelamento
FalseLo scongelamento non è stato selezionato dall’utente
Segnala il numero delle volte che è stato premuto il pulsante
Potenza
True L’utente ha selezionato la potenza in caso di griglia
FalseNon è stato premuto il pulsante
Segnala il numero delle volte che è stato premuto il pulsante
Cottura Automatica per selezionare il giusto piano di cottura
Segnala il numero delle volte che è stato premuto il pulsante
Peso per aggiungere 10 g
Segnala il numero delle volte che è stato premuto il pulsante
Peso per togliere 10 g
True l’utente richiede di poter selezionare un ritardo
nell’inizio della cottura
Falseil pulsante Ritardo non è stato premuto
TrueL’utente chiede la visualizzazione dell’ora
False Pulsante Ora non selezionato
Variabili interne e costanti
Nome
Timer
Tipo
TON*
Display
SCREEN**
Watch
WATCH**
LATE
TIME
*TON = On-Delay Timer
Descrizione
Timer collegato al supervisore per segnalare la fine del tempo
di cottura
Schermo digitale
Orologio interno
Se è stato selezionato un ritardo ne tiene in memoria il valore
39
**componenti standard non implementati
Variabili in uscita
Nome
GO
Tipo
BOOL
STP
BOOL
POTENZA
Time
GrillOn
INT
TIME
BOOL
Descrizione
True da il segnale di partenza ai sistemi ad esso collegati
False situazione di riposo
True da il segnale di stop ai sistemi collegati
False situazione di cottura o di riposo
Valore richiesto di potenza
Tempo di cottura
True accendo la spia griglia
False spia griglia spenta
2.4.3 Function Block
fig.31
40
Componenti standard utilizzati (Function Block e breve spiegazione)
fig.32
Il timer è costituito da un segnale di avvio In e settato nel momento dell’avvio ad un valore PT. Da
quel momento il timer è acceso e decrementa man mano il tempo.CT indica il tempo corrente, Q
invece è un valore booleano che indica che il timer è ancora in funzione. Nel momento in cui CT
diventa pari a 0, Q diventa Falso.
fig.33
Il display è costituito da una stringa di lettere o caratteri(max 5) in entrata (str) e una variabile
booleana Show che procede a scrivere al stringa tramite i led. Possiede inoltre una variabile canc
che se settata comanda la cancellazione della stringa dal display.
fig.34
L’Orologio digitale interno è costituito da un comando di Reset RS che permette di inizializzare o
modificare l’orario inserendo quello specificato nella variabile time RST. T indica l’orario corrente.
41
2.4.4 Automa a stati finiti
fig.35
Descrizione stati
Nome stato
Off
Orario
Auto
Manual
Grill
Scongelamento
On
Stop
Errore
Descrizione
Forno spento
Visualizza l’ora corrente su display
Programmazione Cottura Automatica
Programmazione Cottura Manuale
Programmazione Cottura con Griglia
Programmazione Scongelamento
Cottura
Cottura interrotta dall’utente
Stato di pericolo
42
Condizioni di transizione degli stati
c1:= (Pot>0) (*Programm manule*)
c2:= ALT(*annullamento delle programmazioni*)
c3:= ALT
c4:= (AUT>0)(*Programma automatico*)
c5:= SCONG
c6:= ALT
c7:= Ora(*Richiesta Orario*)
c8:= True(*Dopo un ciclo torna allo stato di Off*)
c9:= ALT
c10:= POTGRILL(*cottura con la griglia*)
c11:= VIA (*l’utente segna l’avvio della cottura*)
c12:= VIA
c13:= VIA
c14:= VIA
c15:= Err1 or Err2 or Err3 (*si è verificato un errore*)
c16:= True (*Dopo aver messo in sicurezza l’impianto torniamo alla situazione di off*)
c17:= ALT (*interruzione della cottura da parte dell’utente*)
c18:= VIA (*Ripresa comandata dall’utente*)
c19:= (Timer.CT = t#0s) (*terminato il tempo di cottura*)
c20:= ALT (*l’utente ha premuto ALT dallo stato di Stop per annullare la programmazione*)
43
2.4.5 Diagramma SFC(Sequencial Function Chart)
fig. 36
2.4.6 Linguaggio ST (Structured Text)
VAR_INPUT
VIA,ALT,Err1,Err2,Err3: BOOL;
Tempo1,Tempo2,Tempo3,Tempo4: INT;
Scong, PotGrill :BOOL;
Pot, PesoPiù, PesoMeno, AUT: INT;
Ora,Ritardo: BOOL;
END_VAR
VAR
Timer:TON;
Watch:WTC;
Displey:SCRN;
LATE:TIME;
END_VAR
44
VAR_OUTPUT
GO,STP:BOOL;
Time: TIME;
Potenza: INT;
GrillOn:BOOL;
END_VAR
ACTION Funz Comb
If OFF.X THEN c5:= SCONG; c7:= Ora; c1:= (Pot>0); c10:= POTGRILL; c4:= (AUT>0);
ELSEIF ORARIO.X THEN c8:= True;
ELSEIF AUTO.X THEN c3:= ALT; c14:= VIA;
ELSEIF MANUAL.X THEN c2:= ALT; c13:= VIA;
ELSEIF Scongelamento.X THEN c6:= ALT; c11:= VIA;
ELSEIF GRILL.X THEN c9:= ALT; c12:= VIA;
ELSEIF ON.X THEN c15:= Err1 or Err2 or Err3; c17:= ALT; c19:= (Timer.CT = t#0s)
ELSEIF STOP.X THEN c18:= VIA; c20:= ALT;
ELSEIF ERRORE.X THEN c16:= True;
END_IF
END_ACTION
ACTION A1(*microonde spento *)
Display.cancel:=True.
Timer(In:=False;PT:=t#0s);
GO:=False;
STP:=True;
Time: =t#0s;
Potenza:=0;
GrillOn:=False;
END_ACTION
ACTION A2(*Visualizzo l’orario*)
Display.cancel:=True;
Display(str:=Watch.T, Show:=True);
END_ACTION
ACTION A3(*Imposto lo scongelamento*)
IF (POT=1) THEN Potenza:= 100;(*potenza minima consigliata*)
ELSEIF (POT=2) THEN Potenza:= 200;(*potenza massima consigliata*)
END_IF
Dispaly.cancel:=True;
Display(str:=Potenza, Show:=True);
END_ACTION
ACTION A3bis(*prende il tempo*)
IF Ritardo THEN(*se si sta settando un ritardo nell’avvio*)
LATE:=LATE+(Tempo1 * t#10m) + (Tempo2 * t#1m) + (Tempo3 * t#10s) + (Tempo4 * t#1s);
IF (LATE>t#0s) THEN Dispaly.cancel:=True; Display(str:=LATE, Show:=True);END_IF
ELSE (*se si sta settando il tempo vero e proprio *)
Time:= Time+(Tempo1 * t#10m) + (Tempo2 * t#1m) + (Tempo3 * t#10s) + (Tempo4 * t#1s) ;
(*viene controllato l’inserimento di ulteriori minuti o secondi per ogni ciclo finché non viene
premuto via*)
45
IF (Time>t#0s) THEN Dispaly.cancel:=True; Display(str:=Time, Show:=True);END_IF
END_IF
END_ACTION
ACTION A4(*grill*)
GrillOn:=True;
IF (Pot>5) THEN Pot:=Pot%5;(*se il tasto selezione è stato premuto più di 5 volte ricomincio
dalla potenza di grado maggiore*)
CASE Pot OF
1: Potenza:= 600;(*Potenza diminuite di un livello per la presenza della griglia*)
2: Potenza:= 400;
3: Potenza:= 200;
4,5,0: Potenza:= 100;
END_CASE
Dispaly.cancel:=True;
Display(str:=Potenza, Show:=True)
END_ACTION
ACTION A4bis(*prende il tempo*)
IF Ritardo THEN(*se si sta settando un ritardo nell’avvio*)
LATE:=LATE+(Tempo1 * t#10m) + (Tempo2 * t#1m) + (Tempo3 * t#10s) + (Tempo4 * t#1s);
IF (LATE>t#0s) THEN Dispaly.cancel:=True; Display(str:=LATE, Show:=True);END_IF
ELSE (*se si sta settando il tempo vero e proprio *)
Time:= Time +(Tempo1 * t#10m) + (Tempo2 * t#1m) + (Tempo3 * t#10s) + (Tempo4 * t#1s);
(*viene controllato l’inserimento di ulteriori minuti o secondi per ogni ciclo finchè non viene
premuto via*)
IF (Time>t#0s) Dispaly.cancel:=True; Display(str:=Time, Show:=True);END_IF
END_IF
END_ACTION
ACTION A5(*impostazione manuale*)
If (Pot>5) THEN Pot:=Pot%5;
CASE Pot OF
1: Potenza:= 800; (*livelli di potenza standard*)
2: Potenza:= 600;
3: Potenza:= 400;
4: Potenza:= 200;
5,0: Potenza:= 100;
END_CASE
Dispaly.cancel:=True;
Display(str:=Potenza, Show:=True);
END_ACTION
ACTION A5bis(*prende il tempo*)
IF Ritardo THEN(*se si sta settando un ritardo nell’avvio*)
LATE:=LATE+(Tempo1 * t#10m) + (Tempo2 * t#1m) + (Tempo3 * t#10s) + (Tempo4 * t#1s);
IF (LATE>t#0s) THEN Dispaly.cancel:=True; Display(str:=LATE, Show:=True);END_IF
ELSE (*se si sta settando il tempo vero e proprio *)
Time:= Time +(Tempo1 * t#10m) + (Tempo2 * t#1m) + (Tempo3 * t#10s) + (Tempo4 * t#1s);
(*viene controllato l’inserimento di ulteriori minuti o secondi per ogni ciclo finchè non viene
premuto via*)
46
IF (Time>t#0s) Dispaly.cancel:=True; Display(str:=Time, Show:=True);END_IF
END_IF
END_ACTION
ACTION A6(*impostazione automatica*)
If (AUT>7) THEN Pot:=Pot%7;
CASE Pot OF
1: Potenza:=200W ;
2: Potenza:=600W ;
3: Potenza:=800W;
4: Potenza:=800W ;
5: Potenza:=800W;
6: Potenza:=800W ;
7,0: Potenza: = 800W;
END_CASE
Dispaly.cancel:=True;
Display(str:=Potenza, Show:=True);
END_ACTION
ACTION A6bis(*stabilisco il tempo*)
IF Ritardo THEN(*se si sta settando un ritardo nell’avvio*)
LATE:=LATE+(Tempo1 * t#10m) + (Tempo2 * t#1m) + (Tempo3 * t#10s) + (Tempo4 * t#1s);
IF (LATE>t#0s) THEN Dispaly.cancel:=True; Display(str:=LATE, Show:=True);END_IF
ELSE (*se si sta settando il tempo vero e proprio *)
CASE Pot OF
1: Time:=Time+t#10s*(PesoPiù-PesoMeno) ;(*man mano che viene inserito il peso il tempo
aumenta, mentre la potenza rimane fissa a seconda del tipo di cottura automatica prescelto*)
2: Time:=Time+t#12s*(PesoPiù-PesoMeno) ;
3: Time:=Time+t#15s*(PesoPiù-PesoMeno);
4: Time:=Time+t#20s*(PesoPiù-PesoMeno);
5: Time:=Time+t#30s*(PesoPiù-PesoMeno);
6: Time:=Time+t#40s*(PesoPiù-PesoMeno);
7,0: Time:=Time+t#1m*(PesoPiù-PesoMeno);
IF ((PesoPiù-PesoMeno)>0) Dispaly.cancel:=True;
Display(str:=(PesoPiù-PesoMeno), Show:=True);END_IF
END_IF
END_ACTION
ACTION A7(*accendiamo il forno*)
IF Ritardo THEN Timer(In:=True;PT:=LATE);
REPEAT LATE:=Timer.CT;
UNTIL (LATE=t#0s)
END_REPEAT
Ritardo:=False;
END_IF
Display.cancel:=True;
Timer(In:=True;PT:=Time);
GO:=True;
STP:=False;
END_ACTION
47
ACTION A7bis(*visualizzo il tempo mancante che si decrementa*)
Dispaly.cancel:=True;
Display(str:=Timer.CT, Show:=True);
END_ACTION
ACTION A8(*errore*)
Display.cancel:=True;
GO:=False;
STP:=True;(*spengo l’impianto*)
END_ACTION
ACTION A9(*cottura interrotta*)
Time:=Timer.CT;
Timer(In:=False; PT:=t#0s);
GO:=False;
STP:=True;
END_ACTION
48
3.FDB globali
3.1 Collegamenti interni
fig.37
3.2 Interazione tra supervisore e impianto
fig.38
49
4.Conclusione
Per ottenere buoni risultati di cottura si ricorda all’utente che i tempi di cottura sono fortemente
influenzati dall’abitudine personale, dalla dimensione e forma dei cibi,dalla temperatura di partenza
e dai contenitori usati .Per una cottura più personalizzata si consiglia di usare il programma
manuale: i tempi previsti nei programmi predefiniti sono approssimativi.Inoltre si ricorda che è
meglio cuocere poco che molto poiché un cibo poco cotto può comunque essere rimesso nel
microonde . Per il buon uso del microonde si consiglia di non cuocervi piccole quantità di cibo o
cibo con un basso contenuto di umidità perché potrebbe bruciarsi o seccarsi o incendiarsi se cotto
troppo a lungo e danneggiare le strutture del forno.Per la stessa motivazione è consigliabile non
inserire nel forno, uova con guscio, superfici porose non precedentemente forate, carta , plastica o
altri materiali combustibili, lattine o bottiglie chiuse, utensili di metallo.E’ previsto inoltre uno
spazio minimo di 2cm tra il contenitore e le pareti per consentire al piatto di girare e per evitare la
formazione di scintille nello sfregamento con le pareti del forno . La regolazione dell’impianto
secondo specifici programmi o temperature deve essere richiesta alla casa produttrice.
Nel microonde il cibo è riscaldato per breve tempo e questo può condurre ad una cottura non
uniforme. Il forno a microonde è spesso usato per riscaldare cibo cotto in precedenza ed i batteri
potrebbero non essere eliminati completamente ed essere causa di infezioni alimentari.La cottura
disomogenea è dovuta principalmente alla non omogeneità dell'energia delle microonde all'interno
della camera di cottura, ma anche dalla differente capacità di assorbimento delle diverse parti del
cibo. Se il primo problema viene affrontato con l'uso di piatti rotanti e riflettori che distribuiscono
più uniformemente l'energia. Il secondo problema deve essere gestito dal cuoco, che deve disporre
il cibo in modo opportuno e verificare periodicamente lo stato e l'uniformità della cottura.
Per quanto riguarda la sicurezza del forno vi sono alcuni pericoli immediati da fare presenti.
-
-
-
-
I liquidi riscaldati al microonde in contenitori dalla pareti lisce possono raggiungere
lo stato supercritico, ovvero una condizione in cui la temperatura è superiore di
alcuni gradi a quella di ebollizione ma la sostanza rimane liquida. Quando il liquido
viene in qualche modo perturbato, per esempio afferrando il contenitore per estrarlo
dal forno, l'ebollizione può iniziare in modo esplosivo, è può essere causa di gravi
ustioni.
I contenitori chiusi, così come le uova, quando riscaldate nel microonde possono
esplodere a causa della pressione del vapore che si produce all'interno.
Diversi materiali, se riscaldati troppo a lungo possono carbonizzare e prendere
fuoco. É consigliabile tenere sempre sorvegliato il forno acceso.
Fogli di alluminio, stoviglie in ceramica decorate con metalli e oggetti contenenti
metalli possono produrre scintille esposte alla microonde. Il metallo può fondere e
contaminare il cibo e si possono produrre vapori tossici dai materiali investiti dalla
scarica. Alcuni hanno provato a sottoporre al microonde i compact disc, che si
distrugge formando sulla superficie una serie di motivi circolari, ma emette nel
frattempo fumi tossici.
Porre nel microonde oggetti in metallo solido come per esempio un cucchiaio è
sicuro, purché sia presente cibo o acqua per assorbire le microonde riflesse
dall'oggetto.
La presenza di un grosso condensatore che potrebbe mantenere una carica elettrica
ad alta tensione in quantità letale, anche per lungo tempo dopo lo spegnimento
dell'apparecchio. Normalmente, allo spegnimento questa energia si scarica sul
50
-
-
-
magnetron in una frazione di secondo, ma ciò non è sempre certo, specialmente nel
caso di apparecchi guasti.
L'emissione di microonde all'esterno dell'apparecchio, che può essere causa di
ustioni e opacizzazione del cristallino con conseguente formazione di cataratta e
cecità.
Con la sempre maggiore diffusione delle reti wireless, che operano nel campo delle
microonde a frequenze vicine a quelle usate nel forno, crescono le preoccupazioni
per le interferenze che possono essere causate da questi apparecchi.
Il limite di emissione di radiazioni è di 1 mW/cm2 a 5 cm di distanza da un forno
nuovo (per un forno usato il limite sale a cinque volte). Difficilmente un forno come
quello per cui è stato fatto il controllo eccede questo limite. Come confronto un
telefono cellulare GSM può emettere 1 W a 1800 MHz, che produce un campo di 2
mW/cm2 a 5 cm.
51
Indice delle figure
1. Descrizione Generale
fig.1 pag.5:schema generale delle componenti del microonde
2.Descrizione dei componenti
2.1 Sistema piatto girevole
fig.2 pag.7:schema componenti sistema
fig.3 pag.9: Function block
fig.4 pag.9: Automa a stati finiti
fig.5 pag.10: Diagramma SFC
fig.6 pag 12: Ladder Diagram della Funzione Combinatoria
fig.7-8 pag 13: Ladder Diagram della Funzione Combinatoria
fig.9-10-11 pag 14: Ladder Diagram della Funzione Combinatoria
2.2 Sistema di emissione microonde
fig.12 pag.17:schema componenti sistema
fig.13 pag.18schema funzionamento dei tubi di magnetron
fig.14 pag. 20: Function block
fig.15 pag. 21: Automa a stati finiti
fig.16 pag. 22: Diagramma SFC
fig.17 pag 24: Ladder Diagram della Funzione Combinatoria
fig.18-19 pag 25: Ladder Diagram della Funzione Combinatoria
fig.20 pag 26: Ladder Diagram della Funzione Combinatoria
fig.21-22 pag 27: Ladder Diagram della Funzione Combinatoria
2.3 Sistema di sicurezza
fig.23 pag.30:schema componenti sistema
fig.24 pag.32: Function block
fig.25 pag.32: Automa a stati finiti
fig.26 pag.33: Diagramma SFC
fig.27-28 pag 35: Ladder Diagram dell’Azione A1
fig.29 pag 36: Ladder Diagram dell’Azione A1
2.4 Logica di supervisione
fig.30 pag.37:immagine pannello di controllo
fig.31 pag.40: Function block
fig.32 pag.41: Function block del componente timer
fig.33 pag.41: Function block del componente schermo digitale
fig.34 pag.41: Function block del componente orologio
fig.35 pag.42: Automa a stati finiti
fig.36 pag.44: Diagramma SFC
52
3.FDB(Function Block Diagram) globali
fig.37 pag.49: interazione tra i componenti del microonde (FDB)
fig.38 pag.49: interazione tra l’impianto e il supervisore (FDB)
53