Corso di Fisica 3
ONDE E
ELETTROMAGNETISMO
Prof. Andrea Danani
DTI- Dipartimento Tecnologie Innovative
LaMFI- Laboratorio di Matematica e Fisica applicata
Galleria 2, 6928 Manno
Anno accademico 2010-2011
2
markright
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
Indice
Indice
3
1 Ottica geometrica
1.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Legge della riflessione . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Specchi piani . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Applicazioni di specchi piani: sistemi di specchi piani multipli
1.4 Specchi sferici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4.1 Riflessione su superficie sferica . . . . . . . . . . . . . . . . . .
1.4.2 Specchi concavi e convessi . . . . . . . . . . . . . . . . . . . .
1.4.3 Nomenclatura e convenzione dei segni . . . . . . . . . . . . . .
1.5 Aberrazione e ottica di Gauss . . . . . . . . . . . . . . . . . . . . . .
1.6 Formula dei punti coniugati . . . . . . . . . . . . . . . . . . . . . . .
1.7 Costruzione grafica di un immagine . . . . . . . . . . . . . . . . . . .
1.8 Ingrandimento e potenza . . . . . . . . . . . . . . . . . . . . . . . . .
1.9 Specchi concavi: formazione dell’immagine . . . . . . . . . . . . . . .
1.9.1 Specchi concavi: modalità convergente . . . . . . . . . . . . .
1.9.2 Specchi concavi: modalità divergente . . . . . . . . . . . . . .
1.10 Specchi convessi: formazione dell’immagine . . . . . . . . . . . . . . .
1.11 Caso speciale: specchi piani . . . . . . . . . . . . . . . . . . . . . . .
1.12 Rifrazione: legge di Snell . . . . . . . . . . . . . . . . . . . . . . . . .
1.12.1 Illusioni ottiche . . . . . . . . . . . . . . . . . . . . . . . . . .
1.12.2 Riflessione totale . . . . . . . . . . . . . . . . . . . . . . . . .
1.12.3 Riflessione totale: applicazioni . . . . . . . . . . . . . . . . . .
1.12.4 Riflessione totale: effetto fish-eye . . . . . . . . . . . . . . . .
2 Le lenti
2.1 Immagini per rifrazione . . . . . . . . . . . . . . . .
2.2 Lenti sferiche: doppio diottro . . . . . . . . . . . .
2.3 Lenti sottili. . . . . . . . . . . . . . . . . . . . . . .
2.4 Lenti sottili convergenti: formazione dell’immagine
2.5 Lenti sottili divergenti: formazione dell’immagine .
2.6 Strumenti ottici . . . . . . . . . . . . . . . . . . . .
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
9
9
10
11
11
11
12
13
14
15
16
17
17
17
18
19
20
21
23
24
24
.
.
.
.
.
.
25
26
28
28
29
31
32
4
INDICE
2.6.1
2.6.2
2.6.3
La macchina fotografica . . . . . . . . . . . . . . . . . . . . . .
L’occhio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Il microscopio composto . . . . . . . . . . . . . . . . . . . . . .
3 Onde
3.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Il moto ondulatorio . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Descrizione matematica . . . . . . . . . . . . . . . .
3.2.2 Equazione differenziale del moto ondulatorio . . . . .
3.3 Esempi di onde meccaniche . . . . . . . . . . . . . . . . . .
3.3.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . .
3.3.2 Onde trasversali in una corda . . . . . . . . . . . . .
3.3.3 Onde elastiche in una sbarra . . . . . . . . . . . . . .
3.3.4 Altri esempi di onde meccaniche . . . . . . . . . . . .
3.4 Effetto Doppler . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Sorgente in moto rispetto all’osservatore . . . . . . .
3.4.2 Osservatore in moto rispetto alla sorgente . . . . . .
3.5 Il principio di sovrapposizione . . . . . . . . . . . . . . . . .
3.5.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . .
3.5.2 Interferenza di onde prodotte da due sorgenti in fase
3.5.3 Le onde stazionarie . . . . . . . . . . . . . . . . . . .
3.6 Analisi e sintesi armonica . . . . . . . . . . . . . . . . . . .
3.6.1 Il principio di Fourier . . . . . . . . . . . . . . . . . .
3.6.2 Il timbro degli strumenti . . . . . . . . . . . . . . . .
3.7 Qualche nozione di musicologia . . . . . . . . . . . . . . . .
3.7.1 Assonanza e dissonanza . . . . . . . . . . . . . . . .
3.7.2 La scala diatonica o naturale . . . . . . . . . . . . . .
3.7.3 I modi . . . . . . . . . . . . . . . . . . . . . . . . . .
3.7.4 La scala temperata . . . . . . . . . . . . . . . . . . .
3.7.5 Caratteristiche degli intervalli musicali . . . . . . . .
4 Fenomeni elettrici
4.1 Carica elettrica e legge di Coulomb . . .
4.1.1 Proprietà delle cariche elettriche .
4.1.2 Isolanti e conduttori . . . . . . .
4.1.3 La legge di Coulomb . . . . . . .
4.2 Campo e potenziale elettrostatico . . . .
4.2.1 Campo elettrico . . . . . . . . . .
4.2.2 Linee di forza del campo elettrico
4.2.3 Il dipolo elettrico . . . . . . . . .
4.2.4 Distribuzioni continue di cariche .
4.3 La legge di Gauss . . . . . . . . . . . . .
SUPSI-DTI
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Corso di Fisica e Modellistica
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
32
32
33
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
35
35
36
36
39
40
40
41
42
45
46
47
47
48
48
48
50
53
53
53
56
56
57
59
60
62
.
.
.
.
.
.
.
.
.
.
65
65
65
66
66
68
68
69
70
71
72
Prof. Andrea Danani
5
INDICE
4.4
4.5
4.6
4.3.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.2 Flusso di un campo vettoriale . . . . . . . . . . . . . . .
4.3.3 La legge di Gauss . . . . . . . . . . . . . . . . . . . . . .
Conduttori in equilibrio elettrostatico . . . . . . . . . . . . . . .
Il potenziale elettrico . . . . . . . . . . . . . . . . . . . . . . . .
4.5.1 Definizione . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.2 Cariche puntiformi . . . . . . . . . . . . . . . . . . . . .
4.5.3 Potenziale dovuto a una distribuzione continua di carica
4.5.4 Relazione tra campo elettrico e potenziale . . . . . . . .
4.5.5 Potenziale in un conduttore carico isolato . . . . . . . . .
Capacità elettrica e dielettrici . . . . . . . . . . . . . . . . . . .
4.6.1 Capacità . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.2 Condensatori . . . . . . . . . . . . . . . . . . . . . . . .
4.6.3 Energia immagazzinata in un campo elettrico . . . . . .
4.6.4 Polarizzazione della materia: dielettrici . . . . . . . . . .
5 Campi magnetici
5.1 Introduzione . . . . . . . . . . . . . . . . . . . . . .
5.2 Forza di Lorentz . . . . . . . . . . . . . . . . . . . .
5.3 Moto di una carica in un campo magnetico . . . . .
5.4 L’effetto Hall . . . . . . . . . . . . . . . . . . . . .
5.5 Forza magnetica su una corrente elettrica . . . . . .
5.6 Coppia magnetica su una corrente elettrica . . . . .
5.7 La legge di Biot Savart . . . . . . . . . . . . . . . .
5.8 Applicazioni della legge di Biot-Savart . . . . . . .
5.8.1 Campo magnetico di una corrente rettilinea
5.8.2 Forze tra correnti . . . . . . . . . . . . . . .
5.8.3 Campo magnetico di una corrente circolare .
6 Induzione elettromagnetica
6.1 Introduzione . . . . . . . . . . . . . . .
6.2 La legge di Faraday-Henry . . . . . . .
6.3 La legge di Lenz . . . . . . . . . . . . .
6.4 Induzione di movimento . . . . . . . .
6.5 L’autoinduzione . . . . . . . . . . . . .
6.6 Circuiti RL . . . . . . . . . . . . . . .
6.7 Energia immagazzinata in una bobina .
6.8 Oscillazioni elettriche: circuiti RCL . .
6.9 Circuiti accoppiati: mutua induzione .
SUPSI-DTI
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Corso di Fisica e Modellistica
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
72
73
74
76
78
78
79
80
80
81
82
82
82
84
85
.
.
.
.
.
.
.
.
.
.
.
89
89
90
91
92
93
94
96
97
97
98
99
.
.
.
.
.
.
.
.
.
101
101
102
102
103
105
106
107
108
109
Prof. Andrea Danani
6
INDICE
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
Capitolo 1
Ottica geometrica
1.1
Introduzione
Che cosa è la luce? In momenti diversi della storia si è pensato che la luce fosse un
insieme di particelle, in altri che fosse un’onda. Oggi, grazie alla fisica quantistica, si
risponde a questa domanda dicendo che la luce è entrambe le cose: onda e particella. In questo capitolo, vengono esaminate alcune proprietà della luce quando la sua
lunghezza d’onda è molto piccola rispetto alla maggior parte degli ostacoli e delle aperture che essa incontra. In questa approssimazione, detta ottica geometrica, si ignora il
carattere ondulatorio della luce e si parla di raggi luminosi che si propagano in linea
retta. Gli unici fenomeni rilevanti sono la rifrazione e la riflessione. Con l’ottica geometrica, è possibile dare una spiegazione approssimata ma sufficiente in molti casi, del
funzionamento di specchi, prismi, lenti e dei sistemi ottici costruiti con essi.
In generale, nell’attraversamento di una superficie di separazione tra due mezzi,
l’onda luminosa viene in parte riflessa ed in parte rifratta.
7
8
1.1. INTRODUZIONE
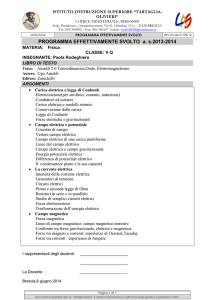
Questo fatto permette di distinguere due tipi di superfici.
• Superfici catottriche o specchi, sulle quali si verifica esclusivamente la riflessione (speculare) senza che la luce sia trasmessa ad un secondo mezzo.
• Superfici diottriche o diottri, sulle quali si verifica la trasmissione della luce
da un mezzo all’altro.
Si possono anche distinguere due tipi distinti di riflessione:
• Riflessione diffusiva: su una superficie scabra la normale cambia punto a punto
e i raggi vengono riflessi in ogni direzione; l’oggetto è quindi visibile in ogni
direzione.
• Riflessione speculare: tutti i raggi vengono riflessi con riferimento alla stessa
normale, e i raggi di luce sono quindi visibili solo in una determinata posizione.
Galileo con questo ragionamento dimostrò che la superficie della Luna non poteva
essere levigata.
Riflessione diffusiva
SUPSI-DTI
Corso di Fisica e Modellistica
Riflessione speculare
Prof. Andrea Danani
9
1.2. LEGGE DELLA RIFLESSIONE
1.2
Legge della riflessione
Quando la luce incontra una superficie riflettente, cambia direzione. Il fenomeno della
riflessione è descritto dalle seguenti due leggi:
• 1a legge: il raggio incidente, il raggio riflesso e la normale alla superficie riflettente
giacciono sullo stesso piano
• 2a legge: l’angolo di incidenza è uguale all’angolo di riflessione: θi = θr
1.3
Specchi piani
Un raggio luminoso inviato su uno specchio disposto perpendicolarmente al piano di
appoggio segue la legge della riflessione. Dato che il cervello ritiene che ogni raggio
luminoso debba necessariamente percorrere una retta, l’immagine di un oggetto posto
davanti a uno specchio si produce come se un oggetto simile fosse dietro allo specchio in
posizione simmetrica rispetto ad esso. Trovandosi sul prolungamento dei raggi riflessi,
si parla di immagine virtuale. A causa della riflessione l’immagine viene simmetrizzata,
invertendo la destra con la sinistra.
Tutti i raggi provenienti dall’oggetto (diffusi da una sorgente luminosa) si riflettono
sullo specchio e quindi vanno in ogni direzione, ma quelli utili per osservare l’immagine
sono solo quelli che raggiungono l’occhio.
Indicando la distanza dell’oggetto con p la distanza dell’immagine con q, dato che i
due triangoli PQR e P’QR sono congruenti, le due distanze sono uguali: p = q. Quindi
gli specchi piani non forniscono ingrandimento: h = h0
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
10
1.3. SPECCHI PIANI
1.3.1
Applicazioni di specchi piani: sistemi di specchi piani
multipli
A causa delle successive riflessioni, due specchi piani formanti tra di loro un angolo α
originano un numero di immagini dato dalla formula:
360o
N = o −1
α
Nella figura sotto, vediamo il caso α = 90o , N = 3.
(1.1)
Il retroriflettore o catarifrangente è formato da tre specchi piani ortogonali posti
sul vertice di un cubo e con apertura triangolare (vedi figura sopra). Questo sistema
permette di riflettere indietro un fascio di luce nella stessa direzione del raggio incidente,
qualunque sia l’angolo di incidenza.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
11
1.4. SPECCHI SFERICI
1.4
1.4.1
Specchi sferici
Riflessione su superficie sferica
Per la legge della riflessione, P HO = OHQ = θi e quindi P HQ = θi . Detto θ l’angolo
di apertura del raggio emergente dal punto oggetto P e θ0 l’angolo di apertura del punto
immagine Q si ottiene la relazione θ0 = θ + θi . Nel triangolo P QH, rispettivamente
per il teorema della bisettrice e per il teorema dei seni si ottiene che:
PH
PO
p−r
=
=
HQ
OQ
r−q
;
PH
sin θ0
=
HQ
sin(θ0 − 2θ)
(1.2)
Uguagliando i due termini si ottiene:
p=
(r − q) sin(θ0 )
+r
sin(θ0 − 2θi )
;
q=
(r − p) sin(θ0 − 2θi )
+r
sin(θ0 )
(1.3)
Come si vede in (1.3), l’espressione per q non dipende solo dalla posizione del punto P
ma anche dall’angolo θ del raggio. Applicando il teorema del seno al triangolo P OH
si ottiene:
sin(θi ) =
1.4.2
(p − r) sin(θ)
r
(1.4)
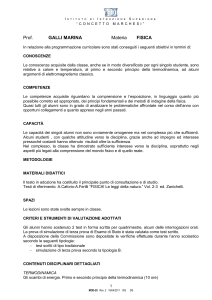
Specchi concavi e convessi
Per ogni raggio incidente sullo specchio vale la legge della riflessione rispetto alla normale alla superficie nel punto di incidenza. Possiamo avere due tipi di curvatura:
convessa o concava.
• Specchio concavo: la riflessione avviene sulla superficie interna della sfera, e
il centro di curvatura è dalla stessa parte rispetto all’osservatore. Offrono varie
modalità di utilizzo, ma in genere la principale è quella in cui offrono immagini
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
12
1.4. SPECCHI SFERICI
ingranditi a campo visivo ridotto (esempio: specchio da trucco). Possono lavorare in modalità convergente o divergente, a seconda della posizione dell’oggetto,
formano quindi immagini sia reali sia virtuali.
• Specchio convesso: la riflessione avviene sulla superficie esterna della sfera, e il
centro di curvatura è dalla parte opposta rispetto all’osservatore. I principali utilizzi sfruttano il fatto che offrono immagini rimpicciolite a campo visivo allargata
(esempi: specchietti retrovisori, specchi stradali agli incroci). Possono lavorare
soltanto in modalità divergente, e quindi formano immagini solo virtuali.
Specchio concavo
1.4.3
Specchio convesso
Nomenclatura e convenzione dei segni
Il punto di riferimento è sempre la direzione da cui provengono i raggi incidenti; per
convenzione si rappresentano sempre come provenienti da sinistra.
• distanza oggetto p e distanza immagine q: distanze dal centro dello specchio V . Se
l’oggetto o l’immagine si trovano dal lato riflettente (a sinistra) le corrispondenti
distanze p e q sono positive; se si trovano dal lato opposto a quello dei raggi
incidenti (a destra) sono negative. La definizione è la stessa sia per gli specchi
concavi sia per quelli convessi.
• raggio e centro di curvatura: R è il raggio della superficie sferica, C il suo centro.
Se C si trova dal lato riflettente (a sinistra) abbiamo R > 0; se C si trova a destra
all’interno dello specchio si ha che R < 0. Quindi se ha che R < 0 per gli specchi
convessi, R > 0 per gli specchi concavi.
• immagine reale e virtuale: per la convenzione sui segni di q si ha q > 0 per
un’immagine reale e q < 0 per un’immagine virtuale.
• altezza oggetto h e altezza immagine h0 : il riferimento è l’oggetto, quindi si pone
a priori h > 0 qualunque sia l’orientamento dell’oggetto; si ha poi h0 < 0 per
un’immagine capovolta, h0 > 0 per un’immagine diretta come l’oggetto.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
1.5. ABERRAZIONE E OTTICA DI GAUSS
13
Uno specchio sferico è inoltre caratterizzato dai seguenti elementi:
• l’asse ottico, che corrisponde alla retta che congiunge il centro con il vertice A;
• il fuoco F , il punto dove convergono tutti i raggi paralleli all’asse ottico dopo la
riflessione;
• la distanza focale f , vale a dire la distanza fra il fuoco e il vertice. Per gli specchi
sferici, vedremo che f = R/2.
1.5
Aberrazione e ottica di Gauss
In generale, negli specchi sferici, i raggi che giungono paralleli all’asse principale non
convergono in un unico punto e si parla di aberrazione. Nel caso in cui l’angolo di
apertura dello specchio è piccolo, vale a dire che sin θ ≈ tan θ ≈ θ, questo non si
verifica ed è possibile definire il fuoco. Questa approssimazione viene definita ottica
di Gauss.
La lunghezza focale di uno specchio concavo si può ricavare in approssimazione
di Gauss con poche semplici considerazioni geometriche. Un raggio parallelo all’asse
colpisce in B lo specchio; la normale alla superficie è BC = r. La riflessione avviene
con angolo θ rispetto alla normale, che è uguale all’angolo BCA quindi il triangolo
CBF è isoscele, e CF = BF . In approssimazione di ottica di Gauss si ha AF ≈ BF
e quindi è AF = CF ; si ottiene quindi la relazione AC = r = 2AF = 2f . La distanza
focale in uno specchio concavo è quindi:
f=
r
2
(1.5)
Notare che vale sempre | f | < | r |. Il fuoco è sempre tra il centro fisico dello
specchio e il suo centro di curvatura.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
14
1.6. FORMULA DEI PUNTI CONIUGATI
1.6
Formula dei punti coniugati
La posizione dell’immagine può essere determinata per via algebrica. Usando le equazioni (1.3) nell’approssimazione di Gauss, si ottiene:
p=
(r − q)θ0
+r
θ0 − 2θi
e θ0 =
rθi
r−q
(1.6)
Sostituendo la seconda equazione nella prima, scompaiono le dipendenze angolari e
si ottiene:
2pq = qr + pr
(1.7)
Quindi, dividendo la (1.7) per pqr, si ottiene l’equazione:
2
1 1
= +
.
r
p q
(1.8)
Nel paragrafo precedente abbiamo dimostrato come in ottica di Gauss si abbia
f = r/2; questo si può però anche ricavare in modo analitico dalla formula sopra
osservando il punto immagine di un punto oggetto ad infinito: per p → ∞ si ha
q = r/2, quindi il fuoco è effettivamente il punto immagine dell’infinito. Detta f la
distanza focale, si ha quindi la formula dei punti coniugati:
1
1 1
= +
.
f
p q
(1.9)
La legge dei punti coniugati (1.9) vale per tutti i casi possibili, purché si attribuiscano i segni opportuni alle distanze p, q e f . La tabella seguente elenca le convenzioni
sui segni per una superficie rifrangente sferica:
Raggio R
Distanza focale f
Oggetto p
Immagine q
+
Concava
Convergente
Reale
Reale
–
Convessa
Divergente
Virtuale
Virtuale
Tabella 1.1: Convenzione sui segni per uno specchio sferico
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
15
1.7. COSTRUZIONE GRAFICA DI UN IMMAGINE
1.7
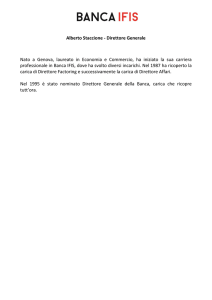
Costruzione grafica di un immagine
E’ possibile ricavare graficamente l’immagine di una sorgente luminosa puntiforme,
sfruttando opportunamente le seguenti proprietà .
• un raggio emesso in direzione parallela all’asse ottico è riflesso nel fuoco dello
specchio;
• un raggio che passa per il centro dello specchio viene riflesso nella medesima
direzione dalla quale proviene;
• un raggio passante per il fuoco viene riflesso parallelamente all’asse ottico;
• Un raggio che incide sul vertice viene riflesso simmetricamente rispetto all’asse
ottico.
Le proprietà elencate sono formulate per uno specchio concavo ma sono valide anche
per uno concavo considerando i prolungamenti virtuali dei raggi, come si può vedere
nella figura (1.1)
Poiché tutti i raggi emessi da un punto convergono in un medesimo punto, basta
costruire due raggi e trovarne l’intersezione.
Figura 1.1: Raggi principali nel caso di specchi sferici. (a) concavo e (b) convesso.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
1.8. INGRANDIMENTO E POTENZA
1.8
16
Ingrandimento e potenza
L’ingrandimento G di uno specchio è il rapporto fra l’altezza dell’immagine e quella
dell’oggetto. Si può dimostrare che vale
G=
h0
q
=−
h
p
(1.10)
In base alla convenzione adottata per i segni, si ha h > o e p > 0 (può essere p¡0solo
in particolari sistemi ottici che verranno discussi a parte). Quando l’immagine è reale
(q > 0) si ha un’immagine capovolta (h0 < 0) ; quando l’immagine è virtuale (q < 0) si
ha un’immagine diritta (h0 > 0). Da questo origina il segno negativo nella definizione
dell’ingrandimento trasversale. L’immagine è ingrandita quando è più distante
dell’oggetto rispetto allo specchio.
La relazione è facilmente dimostrabile considerando che i triangoli evidenziati in
figura sono simili.
La potenza di uno specchio, quando il raggio e la focale di uno specchio sono
misurati in metri, si definisce come l’inverso della lunghezza focale ed è espressa in
diottrie; la potenza si indica generalmente con la lettera K.
La potenza degli specchi è positiva per gli specchi concavi e negativa per gli specchi
convessi, esattamente come le rispettive distanze focali.
Uno specchio concavo di raggio r = 05 m avrà per esempio una focale f = 25 cm
e una potenza K = 4 D; uno specchio convesso di raggio r = −1 m avrà per esempio
una focale f = −50 cm e una potenza K = −2 D.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
17
1.9. SPECCHI CONCAVI: FORMAZIONE DELL’IMMAGINE
1.9
1.9.1
Specchi concavi: formazione dell’immagine
Specchi concavi: modalità convergente
Se un oggetto è posto tra centro e fuoco, si ha un’immagine reale, postra tra centro
e fuoco, capovolta e ingrandita. Per l’invertibilità del cammino ottico, se l’oggetto
e l’immagine possono scambiarsi i ruoli e il diagramma non cambia: un’oggetto posto prima del centro forma un’immagine reale, posta tra centro e fuoco, capovolta, e
rimpicciolita.
1.9.2
Specchi concavi: modalità divergente
Se l’oggetto è posto tra fuoco e specchio l’immagine risultante è virtuale, dietro lo
specchio, diritta e ingrandita. Questa è la modalità in cui usa uno specchio da trucco,
avvicinando molto allo specchio oltrepassando la posizione del punto focale.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
1.10. SPECCHI CONVESSI: FORMAZIONE DELL’IMMAGINE
1.10
18
Specchi convessi: formazione dell’immagine
Anche per gli specchi convessi si verifica il fenomeno dell’aberrazione sferica. Se però
lo specchio è piccolo rispetto al suo raggio di curvatura, ed è possibile lavorare in ottica
gaussiana, l’aberrazione sferica è trascurabile, tutti i raggi vengono riflessi formando
piccoli angoli con la normale nel punto di riflessione, e i loro prolungamenti oltre la
superficie riflettente si incontrano in un unico punto, il fuoco. Si ricordi che gli specchi
convessi hanno distanza focale e raggio di curvatura negativi.
L’equazione degli specchi non cambia, ed è solo necessario considerare le grandezze con il segno corretto. Uno specchio convesso fornisce sempre e solo un’immagine
virtuale, essendo divergente. Indipendentemente dalla distanza dell’oggetto dal centro
dello specchio e dal fuoco, l’immagine è sempre diritta, virtuale, e rimpicciolita.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
1.11. CASO SPECIALE: SPECCHI PIANI
1.11
19
Caso speciale: specchi piani
Uno specchio piano può essere considerato come il caso limite di uno specchio sferico:
uno specchio piano è uno specchio sferico di raggio di curvatura r = oo
L’equazione degli specchi diventa quindi:
1 1
2
2
+ =
=
=0
p q
R
∞
(1.11)
p = −q
(1.12)
da cui segue:
e cioè che l’immagine è virtuale e simmetrica rispetto alla superficie dello specchio,
a grandezza naturale e nella stessa direzione dell’oggetto (G = 1).
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
1.12. RIFRAZIONE: LEGGE DI SNELL
1.12
20
Rifrazione: legge di Snell
Quando la luce incide sulla superficie di separazione di due mezzi trasparenti viene
deviata. La deviazione è dovuta alla diversa velocità che la luce ha nei due mezzi: il
raggio si avvicina alla normale se entra in un mezzo in cui la velocità della luce è minore;
si allontana dalla normale se entra in un mezzo in cui la velocità della luce è maggiore.
Il comportamento del raggio rifratto è descritto dalle due leggi della rifrazione:
• 1a legge: il raggio incidente, il raggio rifratto e la normale alla superficie riflettente giacciono sullo stesso piano
• 2a legge: il rapporto fra i seni dei due angoli di incidenza e di rifrazione è
costante.
sin θ1
n2
=
= n12
sin θ2
n1
La seconda legge è nota come legge di Snell. n12 è l’indice di rifrazione del mezzo B
(in cui la luce penetra) relativo al mezzo A (da cui la luce proviene). Se n12 > 1, si dice
che il mezzo 2 è otticamente pı̀ù denso del mezzo 1. In questo caso il raggio rifratto si
avvicina alla normale, come illustrato nella Fig.(1.2) con aria e vetro, dove v1 > v2 .
Figura 1.2: Rifrazione nel passaggio da aria a vetro
La definizione di angoli di incidenza è la stessa utilizzata per la riflessione, e cioè
l’angolo tra raggio incidente e normale alla superficie, mentre l’angolo di rifrazione è
l’angolo tra il raggio rifratto e la normale alla superficie.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
1.12. RIFRAZIONE: LEGGE DI SNELL
21
Figura 1.3: Tripla riflessione e doppia rifrazione
1.12.1
Illusioni ottiche
La rifrazione è responsabile di molte illusione ottiche appartenenti all’esperienza comune.
Esse sono tutte conseguenza del fatto che il cervello umano interpreta la propagazione della luce
solo secondo linee rette: un diottro piano introduce quindi un’ “illusione ottica”. La donna immersa
in acqua viene percepita con le gambe molto più
corte della realtà; questo perché i raggi provenienti
dai piedi vengono deviati nel passaggio attraverso il diottro piano. L’uomo percepisce l’immagine
virtuale data dal raggio tratteggiato. Un’altra “illusione ottica” dovuta alla rifrazione su un diottro piano è quella data da una matita immersa in
acqua, che sembra spezzata.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
22
1.12. RIFRAZIONE: LEGGE DI SNELL
ESEMPIO 1.1. La maschera subacquea di una nuotatrice è affondata in un a piscina
profonda d = 1 m. Qual è la profondità apparente a cui, osservandola da sopra la
superficie dell’acqua, si trova la maschera?
Soluzione:
L’acqua sembra meno profonda di quanto sia in realtà. I raggi provenienti dagli
oggetti immersi o dal fondo attraversando l’interfaccia aria – acqua vengono deviati,
avvicinandosi alla normale, e divergendo; l’effetto netto è che ad un osservatore fuori dall’acqua i raggi sembrano provenire da un punto più vicino alla superficie. Dal
momento che il testo precisa che l’osservazione avviene dalla normale alla superficie, possiamo assumere l’ipotesi di raggi parassiali e ottenere la profondità apparente
semplicemente dalla formula:
n0
1
=d
= 0.75 m
(1.13)
n
1.33
Osservando dall’esterno un oggetto in acqua l’immagine risulta sempre essere più prossima rispetto alla realtà di un fattore 25%.
d0 = d
Esempio 1.1
Esempio 1.2
ESEMPIO 1.2. La luce colpisce una lastra di vetro piana con un angolo di incidenza
di 60o . Se l’indice di rifrazione del vetro è n = 1.5,
a) qual è l’angolo di rifrazione θA nel vetro?
b) Con quale angolo θB il raggio riemerge dal vetro?
Soluzione:
a) Il raggio incidente proviene dall’aria, quindi è n1 = 1 e n2 = 1.5; la legge di Snell
fornisce il valore:
sin θA = 0.577
SUPSI-DTI
da cui
θA = 35.2o
Corso di Fisica e Modellistica
(1.14)
Prof. Andrea Danani
23
1.12. RIFRAZIONE: LEGGE DI SNELL
b) le due facce di vetro sono parallele, e in questo caso l’angolo di incidenza è θA e
quello di rifrazione θB :
sin θB = 0.866
da cui
θB = 60o
(1.15)
Il raggio non cambia quindi direzione nel passaggio attraverso una la lastra di
vetro a facce piane. Subisce però uno spostamento laterale, come è possibile verificare
osservando un oggetto parzialmente coperto da una lastra di vetro osservando gli effetti
di bordo.
1.12.2
Riflessione totale
Mentre nel passaggio da mezzo ottico meno denso ad uno più denso un raggio luminoso
viene sempre rifratto, non sempre si verifica il contrario. Infatti, quando la luce passa
da un mezzo più denso a uno meno denso, il raggio rifratto si allontana dalla normale
all’aumentare dell’angolo di incidenza e per un dato angolo di incidenza, esso raggiungerà un angolo di 90o parallelo alla superficie di separazione. Se l’angolo di incidenza
aumenta ulteriormente non c’è più rifrazione e il raggio è soggetto al fenomeno della
riflessione totale. L’angolo di incidenza per cui avviene la riflessione totale si chiama
angolo limite e corrisponde al valore di incidenza che genera un angolo di rifrazione di
90o , vale adire:
n2
n2
sin θC =
sin 90o =
.
(1.16)
n1
n1
Per tale valore il raggio rifratto giace sulla superficie. Oltre tale valore la rifrazione
non è più possibile, e tutta la luce viene completamente riflessa, come illustrato nella
figura sotto per i raggi 4 e 5.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
1.12. RIFRAZIONE: LEGGE DI SNELL
1.12.3
24
Riflessione totale: applicazioni
Binocolo: all’interno del binocolo, invece di specchi, vengono posti prismi; la combinazione opportuna delle distanze focali dei prismi, che agiscono sempre come specchi,
perché le loro facce sono sempre orientate in modo tale da avere riflessione totale, produce l’ingrandimento. Il vantaggio, nell’usare i prismi, è che la totalità della luce viene
riflessa in questo modo, mentre questo è impossibile anche nel migliore specchio. La
riflessione totale nei prismi verrà descritta in dettaglio nella sezione dei prismi.
Fibra ottica: la fibra agisce come una guida di luce, in cui il raggio luminoso
si riflette, in modo totale, sulla superficie interna della fibra, procedendo in modo
fortemente obliquo. In questo modo anche se la fibra è topologicamente contorta, si ha
sempre riflessione totale e la fibra trasmette un segnale luminoso praticamente senza
perdite. Il loro utilizzo principale è nelle telecomunicazioni per trasmettere segnali a
larga banda con minima attenuazione.
Endoscopio: un array di fibre ottiche permette la trasmissione di segnali indipendenti per formare un’immagine. La flessibilità del sistema di fibre permette l’inserimento dell’endoscopio all’interno del corpo umano attraverso cavità aeree (trachea,
esofago) o circolatorie (vasi)
1.12.4
Riflessione totale: effetto fish-eye
In caso di superficie molto tranquilla, un subacqueo che osserva verso l’alto subisce il
fenomeno della riflessione totale sul diottro piano costituito dalla superficie di separazione acqua-aria. Questo è dovuto al fatto che i raggi che giungono al subacqueo
subiscono una rifrazione attraverso il diottro piano in un mezzo, l’aria, di indice di
rifrazione minore; si può verificare quindi il fenomeno della riflessione totale sul diottro
piano, caratterizzata da un angolo critico pari a θC = 49o .
I raggi provenienti dal mondo esterno sono quindi compressi in un cono di 49o ;
tutto quanto è esterno a questo cono nella visuale del subacqueo non può provenire
dalla parte sovrastante l’acqua, ma deve essere una riflessione (totale) sulla superficie
dell’immagine del bordo o del fondo della piscina o del bacino.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
Capitolo 2
Le lenti
Abbiamo visto che le leggi della riflessione e della rifrazione consentono di determinare il cammino dei raggi luminosi nei mezzi trasparenti. Esse costituiscono la base
fondamentale per la costruzione degli strumenti ottici, come le lenti per occhiali, microscopi, macchine fotografiche, ecc. In questi dispositivi, la luce viene guidata lungo
un percorso prestabilito e ben determinato.
Una lente è un oggetto trasparente con due superfici rifrangenti i cui assi centrali
coincidono; l’asse comune costituisce l’asse centrale della lente. Le lenti rappresentano
la parte essenziale degli strumenti ottici. In generale vengono usate lenti sferiche,
cioè corpi rifrangenti limitati da superfici sferiche. Le lenti sono sempre di materiale
ad indice di rifrazione maggiore dell’aria, tipicamente di vetro o di plastica. Le due
facce che delimitano le lenti possono avere molte forme diverse e ogni faccia può essere
indipendentemente concava o convessa. Qui sotto vediamo alcune configurazioni
Biconvessa
Menisco convergenti
Biconcava Menisco divergente
Piano concava
A seconda della particolare conformazione, le lenti sferiche si suddividono in lenti
convergenti e lenti divergenti. Nell’ipotesi che l’indice di rifrazione della lente sia maggiore di quello del mezzo in cui si trova (tipicamente, l’aria), le lenti convergenti, più
spesse al centro e più sottili ai bordi, hanno la proprietà di far convergere un fascio
di raggi paralleli in un unico punto (il fuoco della lente); un esempio di questo tipo di
lenti è il telescopio semplice o lente di ingrandimento. Le lenti divergenti, più spesse ai
bordi e più sottili al centro, producono l’effetto contrario, vale a dire, fanno divergere
un fascio di raggi paralleli; sono divergenti, ad esempio, le lenti correttive per la miopia.
25
26
2.1. IMMAGINI PER RIFRAZIONE
2.1
Immagini per rifrazione
Nella figura sotto, sono illustrati i sei possibili risultati per la formazione di un immagine
dopo la rifrazione.
Figura 2.1: I sei possibili modi per formare un immagine per rifrazione.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
27
2.1. IMMAGINI PER RIFRAZIONE
Rispetto alla superficie rifrangente, le immagini reali si formano dalla parte opposta
a quella dell’oggetto, mentre le immagini virtuali si formano dalla stessa parte.
Figura 2.2: Prima rifrazione
Per raggi di luce che formano angoli piccoli con l’asse ottico (approssimazione di
Gauss), vale la formula:
n1 n2
n2 − n1
+
=
.
p
q
R
(2.1)
detta anche formula di Descartes 1 .
Come per gli specchi curvi, la distanza p dell’oggetto e quella q dell’immagine sono
positive quando sono reali, negative quando sono virtuali. Al fine della correttezza di
tutti i segni nell’equazione (2.1), bisogna adottare la seguente convenzione per R:
Quando l’oggetto si affaccia verso una superficie rifrangente convessa, il raggio di
curvatura R è positivo. Se si affaccia verso una superficie concava, R è negativo.
Questa regola è il rovescio di quella adottata per gli specchi curvi. Per il potere di
ingrandimento, l’analogo della formula (1.10) per una superficie rifrangente sferica è :
G=−
1
n1 q
n2 p
(2.2)
Dimostrazione a lezione
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
28
2.2. LENTI SFERICHE: DOPPIO DIOTTRO
2.2
Lenti sferiche: doppio diottro
Una lente sferica si può descrivere una lente come una coppia di diottri sferici, coassiali,
accoppiati.
La posizione dell’immagine Q formata dal punto P attraverso il diottro di raggio
R1 e vertice V1 può essere ricavata dalla formula del diottro sferico:
n1 n2
n2 − n1
+
=
.
p1
q1
R1
(2.3)
Il punto Q è a sua volta immagine per il diottro di raggio R2 e vertice V2 :
p2 = −(q1 − s)
(2.4)
e la posizione dell’immagine finale si ricava applicando nuovamente l’equazione per
il secondo diottro:
n2 n3
n3 − n2
+
=
.
p2
q2
R2
2.3
(2.5)
Lenti sottili.
In seguito, ci limiteremo al caso delle lenti sottili, dove lo spessore è piccolo in rapporto
alla distanza dell’oggetto e alla distanza dell’immagine. Per raggi che formano angoli
piccoli rispetto all’asse ottico e assumendo nelle equazioni (2.4) e (2.5) che s = 0 e
n1 = n3 , si può mostrare che p e q stanno in relazione fra loro secondo l’espressione:
1 1
1
+ =
.
p q
f
(2.6)
dove la distanza focale della lente è data da:
1
= (n − 1)
f
SUPSI-DTI
1
1
−
R1 R2
Corso di Fisica e Modellistica
(2.7)
Prof. Andrea Danani
2.4. LENTI SOTTILI CONVERGENTI: FORMAZIONE DELL’IMMAGINE29
considerando la lente con indice di rifrazione n immersa in aria, R1 il raggio di
curvatura della lente più vicina all’oggetto e R2 quello dell’altra superficie.
L’equazione (2.7) è spesso chiamata equazione del costruttore di lenti. Rimane
valida anche se la lente è immersa in un mezzo in cui l’indice di rifrazione è diverso
da 1; basta sostituire n con n/nmezzo . Pur essendo simile alla legge per gli specchi,
per le lenti q è positivo se l’immagine è dal lato della trasmissione della lente, mentre
la convenzione per i segni di r è uguale a quella prodotta dalla rifrazione: il raggio di
curvatura è positivo se il centro di curvatura è dalla parte della trasmissione e negativo
se è dal lato d’incidenza.
2.4
Lenti sottili convergenti: formazione dell’immagine
La rifrazione avviene tramite infiniti raggi; consideriamo tre raggi particolari:
1. un raggio parallelo all’asse passa per il fuoco immagine F
2. un raggio incidente che passa per il centro ottico delle lenti non viene deviato
3. un raggio incidente che passa per il fuoco oggetto F emerge parallelamente all’asse
A seconda della posizione dell’oggetto l’immagine può essere reale o virtuale. Nella
figura (2.3) vengono mostrati i diversi tipi di immagini formate da lenti convergenti e
divergenti. La situazione viene riassunta dalla seguente tabella:
Relazione
p > 2F
p = 2F
F < p < 2F
p=F
p<F
SUPSI-DTI
Immagine
reale, capovolta, rimpicciolita
reale, capovolta, uguale
reale, capovolta, ingrandita
si forma all’infinito
virtuale, diritta, ingrandita
Corso di Fisica e Modellistica
Prof. Andrea Danani
2.4. LENTI SOTTILI CONVERGENTI: FORMAZIONE DELL’IMMAGINE30
Figura 2.3: Una lente convergente forma un’immagine reale e capovolta quando la
candela è oltre il punto focale F . Se è posta nel fuoco, l’immagine non si forma. Più
vicina del punto focale F , l’immagine è virtuale e ha lo stesso orientamento.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
2.5. LENTI SOTTILI DIVERGENTI: FORMAZIONE DELL’IMMAGINE
31
Quindi quando la candela si trova più vicino del punto focale F , l’immagine è virtuale e ha lo stesso orientamento. È il caso di una lente di ingrandimento: l’angolo a
cui l’occhio percepisce l’immagine ingrandita (la sua dimensione angolare apparente) è
maggiore di quello che sarebbe definito dal medesimo oggetto osservato direttamente,
a distanza normale. Sono lenti convergenti anche quelle utilizzate per correggere l’ipermetropia, il difetto della vista per il quale l’immagine non si forma sulla retina, ma
dietro di essa.
2.5
Lenti sottili divergenti: formazione dell’immagine
La rifrazione avviene tramite infiniti raggi; consideriamo i seguenti raggi particolari:
1. un raggio parallelo all’asse passa per il fuoco immagine F
2. un raggio incidente che passa per il centro ottico delle lenti non viene deviato
3. un raggio incidente che passa per il fuoco oggetto F emerge parallelamente all’asse
Una lente divergente forma un’immagine virtuale dell’oggetto con il suo stesso
orientamento, indipendentemente dalla posizione della candela.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
32
2.6. STRUMENTI OTTICI
2.6
2.6.1
Strumenti ottici
La macchina fotografica
La parti principali di una macchina fotografica sono l’obiettivo, il diaframma e il
contenitore a tenuta di luce della pellicola.
L’obiettivo è un insieme di lenti (gruppi ottici) equivalenti a una lente convergente;
il diaframma è un’apertura, di solito circolare, di larghezza variabile che serva alimitare
la quantità di luce che raggiunge la pellicola.
La luce emessa o diffusa da un oggetto arriva nell’obiettivo, attraversa il diaframma
e giunge sulla pellicola dove si forma l’immagine capovolta e rimpicciolita (Fig.2.6.1).
L’oggetto è a fuoco quando l’immagine cade esattamente sulla pellicola. Se l’oggetto
non è a fuoco, l’immagine si forma davanti o dietro la pellicola. In tal caso, si muove
la ghiera poata sull’obiettivo in modo da riportare l’immagine sul piano della pellicola.
2.6.2
L’occhio
Per certi versi l’occhio è analogo a una macchina fotografica, ma i componenti sono
disposti in ordine diverso (Fig.2.6.2).
La corrispondenza fra i vari componenti è la seguente:
Macchina fotografica
Obiettivo
Diaframma
Pellicola
SUPSI-DTI
Occhio
Cristallino
Iride
Retina
Corso di Fisica e Modellistica
Prof. Andrea Danani
33
2.6. STRUMENTI OTTICI
La messa a fuoco è pero’ diversa: nella macchina fotografica si spostano avanti e
indietro i gruppi ottici nell’obiettivo, mentre nell’occhio il cristallino ha la capacità di
curvarsi per modificare la distanza focale (accomodamento).
Due sono i difetti tipici dell’occhio: miopia e ipermetropia. Nell’occhio miope
l’immagine si forma davanti alla retina perché il cristallino converge troppo; questo
difetto si corregge con lenti convergenti. nell’occhio ipermetrope l’immagine si forma
dietro la retina perché il cristallino converge poco; questo difetto si corregge con lenti
convergenti.
Il potere diottrico di una lente correttiva è l’inverso della distanza focale, espressa
in metri e si misura in diottrie.
2.6.3
Il microscopio composto
Serve per osservare oggetti molto piccoli. Si può schematizzare con due lenti convergenti, chiamate obiettivo e oculare (Fig.2.6.3).
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
34
2.6. STRUMENTI OTTICI
L’oggetto è collocato a una distanza dall’obiettivo di poco superiore alla distanza
focale. Si forma un’immagine reale, ingrandita e capovolta, situata dalla parte opposta
rispetto all’obiettivo. L’oculare usa poi come oggetto l’immagine formata dall’obiettivo
e la ingrandisce ulteriormente.
la distanza focale dell’obiettivo è dell’ordine del centimetro, mentre quella dell’oculare è maggiore.
Una formula approssimata dell’ingrandimento fornito da un microscopio è la seguente:
G=
25 d
fob · foc
(2.8)
dove tutte le distanze sono espresse in centimetri. d rappresenta la distanza fra l’obiettivo e l’oculare mentre fob e foc sono le due distanze focali dell’obiettivo rispettivamente
dell’oculare.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
Capitolo 3
Onde
3.1
Introduzione
Quando si suona una campana, il suono è udito in punti lontani; il suono viene trasmesso attraverso l’aria circostante. Se una barca che si muove velocemente passa ad
una certa distanza dalla spiaggia, la scia che la barca ha prodotto raggiunge alla fine
la spiaggia. Quando si accende una lampadina, la stanza viene illuminata. Per quanto
il meccanismo fisico possa essere diverso per ciascuno dei processi sopra appena ricordati, essi hanno tutti una caratteristica comune: sono perturbazioni fisiche che sono
prodotte in un punto nello spazio, si propagano attraverso lo spazio, e producono un
effetto successivamente in un altro punto.
In generale, si dice che un’onda è generata dalla propagazione spontanea di una
perturbazione in un mezzo soggetto a forze di richiamo, forze cioè che tendono a riportare nella posizione di equilibrio un elemento del mezzo che ne viene allontanato.
Per elemento, intendiamo qui una porzione del mezzo che abbia dimensioni trascurabili
rispetto a quelle della perturbazione. Le perturbazioni possono essere di diverso tipo:
a) impulsive: sono generate da un fenomeno di durata limitata
b) persistenti: l’azione che origina la perturbazione è continua. Fra queste, molto
importanti sono quelle periodiche, dovute a sistemi oscillanti
Bisogna sottolineare che in un’onda, quello che si propaga non è il mezzo stesso, ma
energia lungo il mezzo. Nel fenomeno ondulatorio, non si ha quindi propagazione di
materia!
Esistono due tipi di onde: quelle meccaniche e quelle elettromagnetiche. Qui ci
limiteremo allo studio delle onde meccaniche che si propagano in mezzi elastici, come
ad esempio i corpi solidi e i fluidi che, se sottoposti a forze, subiscono deformazioni. Le
onde elettromagnetiche si possono propagare anche nel vuoto e vanno quindi studiate
a parte.
Si distinguono anche le onde longitudinali da quelle trasversali. Le onde longitudinali sono quelle in cui le particelle del mezzo oscillano nella direzione in cui si pro35
36
3.2. IL MOTO ONDULATORIO
paga l’onda (Fig.(3.1)a). Le onde trasversali sono quelle in cui le particelle del mezzo
oscillano in direzione perpendicolare alla direzione in cui si propaga l’onda (Fig.(3.1)b).
Figura 3.1: Onda longitudinale (a) e onda trasversale (b) su una molla in tre istanti
successivi
3.2
3.2.1
Il moto ondulatorio
Descrizione matematica
Si consideri una funzione ξ = f (x) rappresentata graficamente dalla curva continua
nella figura seguente (Fig.3.2).
Figura 3.2: Traslazione senza distorsione di una funzione ξ(x).
Se ciascun punto della curva è traslato rigidamente della distanza ∆x = a alla
destra (o alla sinistra), allora il valore della funzione in ciascun nuovo punto, diciamo
x’, è lo stesso del valore della funzione a x0 − a (o x0 + a). Quindi f (x − a) rappresenta
la curva spostata senza deformazione verso destra della distanza a e analogamente
f (x + a) rappresenta la stessa curva spostata a sinistra della distanza a.
Si consideri ora uno spostamento continuo della curva f (x). Quando la curva viene
spostata della distanza ∆x dalla posizione della curva all’istante t = 0 nel tempo ∆t
con una velocità v, tale che a = v∆t = vt (dove v è chiamata la velocità di fase),
allora un impulso sta viaggiando lungo la direzione X (Fig.3.3).
Quindi un’espressione matematica della forma:
ξ(x, t) = f (x ± vt)
SUPSI-DTI
Corso di Fisica e Modellistica
(3.1)
Prof. Andrea Danani
37
3.2. IL MOTO ONDULATORIO
Figura 3.3: Propagazione verso destra (a) e verso sinistra (b).
è adatta a descrivere una perturbazione fisica che viaggia o si propaga senza deformazione lungo la parte positiva (o negativa) dell’asse X; questa propagazione è un
aspetto caratteristico del moto ondulatorio. La quantità ξ(x, t) può rappresentare un
gran numero di diverse quantità fisiche, come la deformazione in un solido, la pressione
in un gas, un campo elettrico o magnetico, ecc.
Un caso particolarmente importante è quello detto armonico, nel quale ξ(x, t) è una
funzione sinusoidale tale che
ξ(x, t) = ξ0 sin k(x − vt)
(3.2)
Che cosa rappresenta la quantità k? Quando si sostituisce al valore x il valore x+2π/k,
la funzione ξ(x, t) assume lo stesso valore:
ξ(x +
2π
, t) = ξ0 sin(k(x − vt) + 2π) = ξ0 sin k(x − vt) = ξ(x, t)
k
(3.3)
Quindi λ = 2π/k rappresenta la periodicità spaziale della curva e viene denominata
lunghezza d’onda. La grandezza k rappresenta il numero di lunghezze d’onda nella
distanza 2π ed è chiamato numero d’onda. Perciò :
ξ(x, t) = ξ0 sin k(x − vt) = ξo sin
2π
(x − vt) = 0
λ
(3.4)
rappresenta un’onda sinusoidale o armonica di lunghezza d’onda λ che si propaga alla
destra lungo l’asse X con una velocità di fase v. La forma più usata dell’equazione
precedente è la seguente:
ξ(x, t) = ξ0 sin(kx − ωt)
(3.5)
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
38
3.2. IL MOTO ONDULATORIO
dove la grandezza ω è detta pulsazione (o frequenza angolare) dell’onda ed è in relazione con il periodo T = λ/v tramite ω = 2π/T . Il periodo T è il tempo impiegato per
compiere un’oscillazione completa. Importante è pure la frequenza f (o ν) dell’onda,
che fornisce il numero di oscillazioni al secondo. In particolare si ha
f=
1
ω
=
T
2π
e v= λf
(3.6)
Figura 3.4: Onda armonica che si propaga verso destra. L’onda percorre uno spazio λ
in un tempo T
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
39
3.2. IL MOTO ONDULATORIO
3.2.2
Equazione differenziale del moto ondulatorio
Un secondo passo è un’indagine su come determinare quando un dato campo dipendente dal tempo si propaga come un’onda senza distorsione. I campi associati con
ogni processo fisico sono regolati da leggi dinamiche che sono caratteristiche di ciascun
processo in esame. Queste leggi possono essere espresse sotto forma di equazioni differenziali. Possiamo quindi esaminare la possibilità di trovare una equazione differenziale
applicabile a tutti i tipi di moto ondulatorio. Quindi ogni volta che le sue proprietà
fisiche mostrano che un campo particolare soddisfa una tale equazione, possiamo essere sicuri che il campo si propaga attraverso lo spazio con una velocità definita e senza
distorsione. L’equazione, che incontreremo più volte, la quale descrive un moto ondulatorio che si propaga con una velocità definita v e senza distorsione lungo la direzione
+X o lungo −X è
2
∂ 2ξ
2∂ ξ
=
v
(3.7)
∂t2
∂x2
Questa espressione è detta l’equazione differenziale del moto ondulatorio. La soluzione generale dell’equazione (3.7) è della forma dell’equazione (3.4 ):
ξ(x, t) = f1 (x − vt) + f2 (x + vt).
(3.8)
Quindi la soluzione generale dell’equazione (3.7) può
essere espressa come sovrapposizione di due moti ondulatori propagantesi in direzione opposte. Naturalmente per un’onda che si propaga in una direzione, è
richiesta soltanto una delle due funzioni che appaiono
nella equazione (3.8). Tuttavia quando (per esempio)
vi è un’onda incidente nella direzione + X ed un’onda
riflessa nella direzione -X, si deve usare la forma generale dell’ equazione (vedi Fig.3.5). Si può dimostrare
in generale, per derivazione diretta, che un’espressione avente la forma dell’equazione (3.8) è una soluzione
Figura 3.5: Onde sovrapposte dell’equazione dell’onda (3.7). Utilizzando le relazioni
per ω e k, verifica che l’equazione (3.8) è soddisfatta
dall’onda sinusoidale (armonica)
ξ(x, t) = ξ0 sin(kx − ωt).
SUPSI-DTI
Corso di Fisica e Modellistica
(3.9)
Prof. Andrea Danani
40
3.3. ESEMPI DI ONDE MECCANICHE
3.3
Esempi di onde meccaniche
3.3.1
Introduzione
Per esaminare l’argomento in modo più generale, si consideri una grandezza fisica
descritta da un certo campo. Abbiamo visto che questo campo può rappresentare
un campo elettromagnetico, la deformazione in una molla, la pressione in un gas, la
tensione in un solido, lo spostamento trasversale di una corda, ecc. Si supponga che
le condizioni in un punto divengano dipendenti dal tempo, cosicché si verifica una
perturbazione dello stato fisico del sistema in quel punto. Le proprietà fisiche del
sistema comportano la propagazione di questa perturbazione attraverso lo spazio e la
perturbazione altera le condizioni statiche in altri punti.
Si consideri come esempio la superficie libera di un liquido. Il campo in questo caso è
lo spostamento di ciascun punto della superficie rispetto alla posizione di equilibrio. In
condizioni di equilibrio o statiche la superficie libera di un liquido è piana ed orizzontale;
ma se in un punto le condizioni alla superficie sono perturbate gettando un sasso nel
liquido, è ben noto che questa perturbazione si propaga in tutte le direzioni lungo
la superficie del liquido. Per determinare il meccanismo della propagazione e la sua
velocità , si deve analizzare come lo spostamento di un punto alla superficie del liquido
influenza il resto della superficie. Questa analisi produce le equazioni dinamiche del
processo. Queste equazioni quindi ci danno la possibilità di ottenere informazioni
quantitative sulla variazione nello spazio e nel tempo della perturbazione. Vedremo
ora alcuni esempi specifici: la maggior parte degli esempi riguarderà le onde elastiche
in un mezzo materiale. Nella maggior parte di questi casi la struttura molecolare della
materia sarà trascurata e si farà l’ipotesi di un mezzo continuo. Questa ipotesi è valida
fino a che la lunghezza d’onda è grande confrontata con la separazione intermolecolare
del mezzo che sostiene il moto ondulatorio.
Figura 3.6: Onde elastiche in una molla (a), un gas (b) e in una corda (c)
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
41
3.3. ESEMPI DI ONDE MECCANICHE
3.3.2
Onde trasversali in una corda
Figura 3.7: Forze su un elemento dx di una corda spostata trasversalmente
Si consideri una corda soggetta alla tensione fissata T . In condizioni di equilibrio,
la corda è rettilinea. Si supponga ora che la corda sia spostata perpendicolarmente
alla sua lunghezza di una quantità relativamente piccola rispetto alla lunghezza L.
Questa approssimazione è necessaria, affinchè la corda rimanga in un regime elastico,
dove non subisce una deformazione troppo forte. Consideriamo quindi un elemento
AB della corda, di lunghezza dx, che si sia spostato di una distanza ξ dalla posizione
di equilibrio (in cui ξ = 0). A ciascun estremo A e B dell’elemento, è applicata
una forza tangenziale T dovuta alla trazione esercitata dalla corda (Fig.3.7). A causa
della curvatura della corda, queste due forze pur avendo la stessa intensità non hanno
la stessa direzione. Un’analisi delle forze sull’elemento AB (di massa dm) fornisce le
seguenti equazioni:
Fx = T (cos α0 − cos α) = m · ax
(3.10)
Fy = T (sin α0 − sin α) = m · ay
Dato che la curvatura in esame è piccola, i due angoli α e α0 sono piccoli e molto vicini.
In questo caso si può verificare che:
sin α0 − sin α ≈ α0 − α ≈ tan α0 − tan α
cos α0 − cos α ≈ 0
(3.11)
F x = m · ax ≈ 0
Fy = m · ay ≈ T (tan α0 − tan α)
(3.12)
da cui si ricava che
Come si può notare, la forza risultante nella direzione orizzontale è trascurabile rispetto a quella nella direzione verticale. Per questo motivo, l’onda in una corda è di
tipo trasversale, poiché le oscillazioni degli elementi di corda avvengono in direzione
perpendicolare rispetto alla direzione di propagazione dell’onda, che è diretta lungo la
corda. Dato che tan α è per definizione la pendenza della corda, possiamo associarla
alla derivata ∂ξ/∂x, da cui si ottiene
∂ ∂ξ
∂ 2ξ
Fy = T
dx = T 2 dx
(3.13)
∂x ∂x
∂x
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
42
3.3. ESEMPI DI ONDE MECCANICHE
Questa forza deve essere uguale alla massa dell’elemento di corda AB moltiplicata per
l’accelerazione verticale pari a ∂ 2 ξ/∂t2 . Supponendo che µ = M/L sia la densità
lineare della corda (vale a dire la massa per unità di lunghezza), la massa dell’elemento
è data da µdx. L’equazione (3.12) diventa perciò
(µdx)
ossia
∂ 2ξ
∂ 2ξ
=
T
dx
∂t2
∂x2
∂ 2ξ
T ∂ 2ξ
=
∂t2
µ ∂x2
.
(3.14)
(3.15)
Quindi si ottiene l’equazione (3.7), e se ne deduce che una perturbazione trasversale
lungo una corda elastica si propaga con una velocità
s
T
v=
(3.16)
µ
nel caso in cui l’ampiezza è piccola rispetto alla lunghezza della corda.
3.3.3
Onde elastiche in una sbarra
Se si perturba l’estremo di una sbarra solida, un’onda elastica si propagherà lungo
la sbarra. Vediamo di capire come la velocità di propagazione della perturbazione
dipende dalle caratteristiche fisiche della sbarra. Supponiamo che la sbarra abbia
sezione costante A e sia sottoposta a una forza F lungo il suo asse. Questa forza può
variare lungo l’asse della sbarra. La tensione normale σ in una sezione della sbarra
è definita come la forza per unità di area che agisce perpendicolarmente alla sezione,
quindi:
F
(3.17)
σ=
A
Sotto l’azione delle forze presenti lungo la sbarra, ogni sezione subisce uno spostamento ξ parallelo all’asse. Tralasciamo il caso dello spostamento rigido (ξ costante) e
supponiamo che ξ dipenda da x.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
43
3.3. ESEMPI DI ONDE MECCANICHE
Figura 3.8: Onde longitudinali in una sbarra
Prendiamo due sezioni A e A0 separate da una distanza dx (Fig. 3.8). La sezione
A si sposterà di ξ e A0 di ξ 0 sotto l’azione delle forze in gioco. La distanza fra le due
sezioni, dopo la deformazione, sarà quindi:
dx + (ξ 0 − ξ) = dx + dξ
(3.18)
Definiamo ora la dilatazione normale nella sbarra come la deformazione lungo l’asse
riferita all’unità di lunghezza, da cui si deduce
∂ξ
(3.19)
∂x
Tra la tensione normale σ e la dilatazione normale , esiste una relazione detta legge
di Hooke, che stabilisce che
σ=E ,
(3.20)
=
dove E è detto modulo di elasticità di Young. Le legge di Hooke (3.20) rappresenta
con buona approssimazione il comportamento elastico di un materiale fintantoché le
deformazioni sono piccole. Usando le definizioni (3.19) e (3.20), si ottiene che
∂ξ
.
(3.21)
∂x
Nel caso di una sbarra (o un filo) in equilibrio con un estremo fisso (Fig. 3.9) e l’altro
estremo sottoposto a una forza costante F , la forza dev’essere uguale in ogni sezione e
si ottiene che la deformazione ξ dipende linearmente dalla sezione x.
F = EA
Figura 3.9: Sbarra con un estremo fisso
Infatti:
Z
0
SUPSI-DTI
ξ
F
dξ =
EA
Z
x
dx ossia ξ =
0
Corso di Fisica e Modellistica
F
x.
EA
(3.22)
Prof. Andrea Danani
44
3.3. ESEMPI DI ONDE MECCANICHE
In particolare, la deformazione all’estremo libero si ottiene ponendo x = L in (3.22),
da cui l = F L/EA. Il modulo di Young viene generalmente dedotto sperimentalmente
usando questa relazione.
Cosa succede se la sbarra non è in equilibrio e la forza varia lungo la sbarra? La
forza risultante sull’elemento dx (Fig. 3.8) è dato da:
F 0 − F = dF =
∂F
dx .
∂x
(3.23)
Supponendo che ρ sia la densità del materiale, la massa dell’elemento dx varrà dm =
ρdV = ρAdx e la sua accelerazione sarà ∂ 2 ξ/∂t2 . Dalla legge di Newton si ottiene:
∂F
∂ 2ξ
dx = ρAdx 2
∂x
∂t
ossia ∂F ∂x = ρA
∂ 2ξ
∂t2
(3.24)
Entrambi i campi che entrano in questo problema, vale a dire ξ e F , sono funzioni sia
del tempo che della posizione e sono messi in relazione dalle equazioni (3.21) e (3.24).
Derivando la prima rispetto a x, abbiamo
∂ 2ξ
∂F
= EA 2 ,
∂x
∂x
(3.25)
e sostituendo questo risultato in (3.24), si ottiene
Y ∂ 2ξ
∂ 2ξ
=
.
∂t2
ρ ∂x2
(3.26)
Si tratta di un’equazione d’onda analoga a (3.7), e la velocità di propagazione della
deformazione lungo la sbarra è data da:
s
E
v=
.
(3.27)
ρ
Terminiamo il paragrafo notando che entrambi i campi ξ e F rappresentati dall’onda
sono orientati lungo la direzione di propagazione dell’onda, vale a dire l’asse della
sbarra. Si tratta quindi di un’onda longitudinale.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
3.3. ESEMPI DI ONDE MECCANICHE
3.3.4
45
Altri esempi di onde meccaniche
In questa sezione, segnaliamo senza entrare nel dettaglio un paio di esempi che possono
essere analizzati con metodi analoghi a quelli usati per la corda elastica e la sbarra.
Come primo caso, segnaliamo le onde di pressione in un gas a cui appartiene
il suono. Modificando l’equilibrio del gas variandone la pressione, il gas tenderà a riportarsi all’equilibrio, generando delle onde di pressione che saranno automaticamente
associate a delle onde di densità . Dato che le molecole si muovono avanti e indietro
rispetto alla loro posizione di equilibrio, si parla di onda longitudinale, poichè le oscillazioni locali avvengono nella stessa direzione della propagazione dell’onda. L’analisi
di questo caso, un po’ più complessa di quella della corda, porta all’equazione d’onda
con una velocità data dalla seguente formula:
s
γP
v=
(3.28)
ρ
dove γ è l’esponente adiabatico caratteristico per ogni gas.
Il secondo caso trattato è quello delle onde superficiali in un liquido. Si tratta
delle onde più familiari, ma l’aspetto matematico è fra i più complessi. Infatti, le onde
in un liquido sono una miscela di onde trasversali e longitudinali e le molecole compiono
della traiettorie chiuse attorno all’equilibrio (Fig. 3.14).
Figura 3.10: Spostamento delle molecole dovuto a un’onda superficiale in un liquido
Inoltre molti parametri giocano un ruolo nell’analisi del problema, quali la tensione
superficiale Υ, la profondità h del liquido e la sua densità ρ. L’espressione generale per
la velocità di propagazione di onde superficiali in un liquido è
s
gλ 2πΥ
2πh
v=
+
tanh
(3.29)
2π
ρλ
λ
dove tanh x = (ex − e−x )/(ex + e−x ).
Un aspetto interessante dell’equazione (3.29) è che la velocità di propagazione dipende dalla lunghezza d’onda, situazione non incontrata nei due casi precedenti. In
questi casi si parla di dispersione. Dato che v = f λ, si conclude che la velocità di
propagazione in un mezzo dispersivo dipende dalla frequenza dell’onda.
Vediamo tre casi limiti.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
46
3.4. EFFETTO DOPPLER
a) Quando λ e h sono grandi, tanh 2πh
≈ 1 e il termine 2πΥ
nell’equazione(3.29) può
λ
ρλ
gλ
essere trascurato. Si ha che v = 2π . Queste onde sono dette onde di gravità ,
dove la velocità non dipende dalle proprietà del liquido ma solo dalla lunghezza
d’onda.
b) Se λ è molto piccola e h rimane grande, il termine dominante è il secondo dell’equazione (3.29) e la velocità è data da
s
v=
2πΥ
ρλ
(3.30)
Queste onde sono dette onde capillari o increspature. Si tratta di onde che si
osservano quando un vento molto leggero soffia sopra l’acqua, o quando un liquido
in un contenitore è sottoposto a vibrazioni di alta frequenza e piccola ampiezza.
Maggiore è la lunghezza d’onda, più lenta è la propagazione.
c) Se h λ, tanh x ≈ x e il termine 2πΥ/ρλ può essere trascurato se λ è sufficientemente grande. Quindi
r
v=
p
gλ 2πh
·
=
g·h
2π λ
(3.31)
In questo caso, non si ha dispersione, e la velocità di propagazione è funzione solo
della profondità .
3.4
Effetto Doppler
Nel 1842, il fisico austriaco C. Doppler scopri che l’altezza di un suono non è determinata dalla frequenza della sorgente sonora, bensi dalla frequenza con la quale le onde
sonore colpiscono l’orecchio dell’osservatore. E’ perciò necessario tenere conto del moto
relativo fra la sorgente e l’osservatore. Esamineremo ora due casi, e a questo proposito
definiamo le seguenti grandezze:
• λ: lunghezza d’onda del suono nell’aria
• c: velocità del suono rispetto all’aria
• fs : frequenza con cui vibra la sorgente (frequenza propria)
• fo : frequenza percepita dall’osservatore
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
47
3.4. EFFETTO DOPPLER
Figura 3.11: Effetto Doppler prodotto da una sorgente in movimento sulla superficie
di un liquido
3.4.1
Sorgente in moto rispetto all’osservatore
In questo caso, durante l’emissione di due fronti d’onda successivi (e quindi durante un
periodo), la sorgente compie uno spazio (±vs · T ). Perciò, l’osservatore misurerà una
lunghezza d’onda λ0 diversa da quella propria. Dato che la velocità dell’onda dipende
solo dal mezzo di propagazione, l’osservatore ne dedurrà una frequenza diversa da
quella propria fs . In particolare, si ottiene:
λ0 = λ ± vs · T = c · T 0 =
da cui risulta
fo =
c
f0
=⇒
c
vs
c
−
=
fs fs
f0
(3.32)
1
fs
1 ± vcO
(3.33)
dove il segno + si riferisce all’allontanamento e il segno − all’avvicinamento.
3.4.2
Osservatore in moto rispetto alla sorgente
Poniamo che l’osservatore si muova verso la sorgente ferma con velocità vo . In questo
caso, λ rimane uguale, ma l’osservatore percepisce un maggior numero di creste al
secondo dato che la sua velocità si somma a quella dell’onda, per cui rileva un periodo
più breve. Questo implica
λ = (vO + c)T 0 = c T
=⇒ fo =
c
fs
c + vO
(3.34)
Se l’osservatore si allontana, bisogna sottrarre alla sua velocità quella dell’onda.
Basterà porre in (3.34) −v0 al posto di v0 , e si ottiene nel caso generale:
vO fo = 1 ∓
fs
(3.35)
c
dove il segno − si riferisce all’allontanamento e il segno + all’avvicinamento.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
48
3.5. IL PRINCIPIO DI SOVRAPPOSIZIONE
Un esempio familiare è la variazione dell’altezza del suono dovuto al passaggio di
un treno, quando questo si avvicina e poi si allontana. Un altro esempio noto è il
radar che la polizia adopera per misurare la velocità di un automobile: le onde emesse
dal radar vengono riflesse dall’ auto in moto che funge quindi da sorgente in moto.
Citiamo ancora come ultimo esempio il famoso spostamento verso il rosso (red shift)
della luce proveniente da galassie lontane. Poiché le galassie si allontanano, la luce che
emettono viene spostata verso le lunghezze d’onda più grandi, corrispondenti al rosso.
Misurando questo spostamento, si riesce a determinare la velocità con cui le galassie si
allontanano da noi.
3.5
3.5.1
Il principio di sovrapposizione
Introduzione
Incominciamo con un esperimento. Una lunga molla, appoggiata su un tavolo, è trattenuta agli estremi in modo che sia leggermente tesa. Produciamo dapprima, dando
una breve scossa alle due estremità , due impulsi all’incirca uguali e volti dalla stessa
parte. Essi si muovono incontro e dove si sovrappongono la molla si rigonfia notevolmente. Dopo l’incontro le due creste riprendono le loro forme originarie continuando a
propagarsi lungo la molla. Produciamo ora due impulsi di grandezza all’incirca uguale
ma volti da parti opposte. Questa volta una cresta si muove incontro a una concavità
, e dove le due perturbazioni si sovrappongono l’elongazione della molla è praticamente nulla. Dopo il loro incontro le due perturbazioni riprendono la forma originaria e
continuano a propagarsi lungo la molla come cresta e come concavità .
Da queste constatazioni si ricava che due onde si sovrappongono senza alterarsi.
L’ampiezza dell’onda risultante nella zona di sovrapposizione si ottiene componendo
vettorialmente le elongazioni delle singole onde.
Il principio di sovrapposizione non vale solo per le onde su una molla ma per ogni
tipo di onda. E’ possibile constatarne la validità per le onde sonore notando che le
singole note attraversano imperturbate una zona rumorosa e continuano a propagarsi
come se gli altri suoni non ci fossero. Vediamo ora qualche applicazione del principio
di sovrapposizione.
3.5.2
Interferenza di onde prodotte da due sorgenti in fase
Una conseguenza diretta del principio di sovrapposizione è il fenomeno dell’interferenza.
Esso avviene quando due o più moti ondosi coincidono nello spazio e nel tempo. Come
esempio, si considerino due sorgenti puntiformi S1 e S2 (Fig. 3.13) che oscillano in fase
con la medesima frequenza angolare ω e creano onde di superficie con ampiezze ξ1 e ξ2 .
Le rispettive equazioni sono
ξ1 (r1 , t) = A1 sin(kr1 − ωt) = A1 ei(kr1 −ωt)
ξ2 (r2 , t) = A2 sin(kr2 − ωt) = A2 ei(kr2 −ωt)
SUPSI-DTI
Corso di Fisica e Modellistica
(3.36)
Prof. Andrea Danani
3.5. IL PRINCIPIO DI SOVRAPPOSIZIONE
49
Figura 3.12: Due impulsi in una corda che si muovono in versi opposti con spostamenti
che si rafforzano (a) e che si elidono (b)
Figura 3.13: (a) Linee nodali e ventrali risultanti dall’interferenza di onde prodotte
da due sorgenti identiche. (b) Figura di interferenza effettiva di onde sulla superficie
dell’acqua.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
50
3.5. IL PRINCIPIO DI SOVRAPPOSIZIONE
dove r1 e r2 sono le distanze di un punto P generico da S1 e S2 rispettivamente. Si
osservi che benché le due sorgenti siano identiche, esse non produco no la medesima
ampiezza al punto P se r1 e r2 sono diversi. In seguito, porremo per semplic ità che
A1 = A2 = A. Usando la formula sin x + sin y = 2 sin( x+y
) cos( x−y
), la somma delle
2
2
due onde nel punto P fornisce
k(r1 − r2 )
k
(ξ1 + ξ2 ) (P, t) = 2A cos
sin
(r1 + r2 ) − ωt .
(3.37)
2
2
e l’onda risultante è quindi ancora un’onda armonica di ampiezza 2A cos k(r1 − r2 )/2.
L’ampiezza massima si ottiene quando cos k(r1 − r2 )/2 = 1, vale a dire
k(r1 − r2 )
2π(r1 − r2 )
=
= nπ ,
2
2λ
⇒
r1 − r2 = nλ .
(3.38)
In questo caso si parla di interferenza costruttiva mentre si parla di interferenza
distruttiva quando le due onde si elidono, cioè quando cos k(r1 − r2 )/2 = 0 e si ha
k(r1 − r2 )
2π(r1 − r2 )
π
=
= (2n − 1)
2
2λ
2
⇒
r1 − r2 = (2n − 1)
λ
.
2
(3.39)
Riassumendo:
(1) Interferenza costruttiva
(2) Interferenza distruttiva
=⇒ r1 − r2 = nλ
=⇒ r1 − r2 = (n − 12 )λ
(3.40)
L’equazione r1 −r2 =| P S1 −P S2 | costante definisce un’iperbole con i fuochi in S1 e S2
e le linee definite dai punti P che soddisfano la condizione (2) sono dette linee nodali.
Lontano dalle sorgenti, le linee nodali sono quasi rettilinee poiché coincidono di fatto
con gli asintoti dell’iperbole. Perciò , ponendo d come la distanza fra le sorgenti:
1 λ
∼
∼
| P S1 − P S2 |=| AS1 |= d sin θ =⇒ sin θ = n −
(3.41)
2 d
Questa equazione permette di determinare l’inclinazione delle linee nodali a grandi
distanze, ponendo successivamente n = 1, 2, 3, . . . . Il numero massimo per n per cui
l’equazione è ancora risolvibile (sin θ ≤ 1) determina il numero di linee nodali presente.
Per simmetria, si otterrà la stessa situazione facendo una simmetria assiale rispetto
all’asse verticale passante fra le due sorgenti.
3.5.3
Le onde stazionarie
Consideriamo ora il caso in cui una corda abbia un’estremità fissato nel punto O,
come indicato nella Fig. 13. Un’onda trasversale incidente, in moto verso sinistra, di
equazione
ξ(x, t) = ξ0 sin(kx + ωt)
(3.42)
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
3.5. IL PRINCIPIO DI SOVRAPPOSIZIONE
51
Figura 3.14: Cambiamento di fase di un’onda riflessa in una corda con una estremità
viene riflessa in O e produce una nuova onda che si propaga ora verso destra, con
equazione
ξ(x, t) = ξ0 0 sin(kx − ωt).
(3.43)
Lo spostamento di un punto della corda è l’effetto della sovrapposizione delle due
onde, vale a dire
ξ(x, t) = ξ0 sin(kx + ωt) + ξ00 sin(kx − ωt).
(3.44)
Nel punto O, x = 0, e abbiamo
ξ(x = 0 , t) = (ξ0 − ξ00 ) sin ωt .
(3.45)
Ma dato che il punto O è fisso, significa che ξ(x = 0 , t) = 0 ad ogni istante. Perciò
ξ0 = ξ00 . Perciò l’equazione (3.44) diventa
ξ(x, t) = ξ0 (sin(kx + ωt) + sin(kx − ωt).
(3.46)
ξ(x, t) = 2ξ0 sin kx cos ωt .
(3.47)
da cui si ottiene
Questa equazione non rappresenta più un’onda in movimento, ma piuttosto un’oscillazione la cui ampiezza, variabile da punto a punto, è data da
A(x) = 2ξ0 sin kx .
(3.48)
Come si può notare, esistono dei punti per cui l’interferenza delle due onde è distruttiva
e l’ampiezza è sempre nulla, come nel caso delle sorgenti puntiformi. In questo caso
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
3.5. IL PRINCIPIO DI SOVRAPPOSIZIONE
52
però non si hanno delle linee ma un insieme discreto di punti, detti nodi, che si trovano
in
1
x=
n λ , n = 1, 2, . . .
(3.49)
2
I nodi sono quindi separati da una distanza pari a mezza lunghezza d’onda.
Supponiamo ora di fissare anche l’altra estremità della corda, nel punto x = L.
Tale condizione significa che il punto x = L deve essere un nodo e che deve soddisfare
la condizione kL = nπ. Usando l’equazione (3.49), otteniamo
L=
2L
2L 2L
1
nλ ossia λ =
= 2=L,
,
,...
2
n
2
3
(3.50)
Questa seconda condizione limita automaticamente le lunghezze d’onda delle onde che
possono propagarsi su questa corda ai valori forniti dall’equazione (3.50). Ricordando
che la velocità di propagazione delle onde lungo una corda sottoposta a una tensione
T e di densità lineare µ è data dall’espressione (3.16)
s
T
v=
,
(3.51)
µ
le frequenze di oscillazione permesse sono determinate da
s
1
v
n T
fn =
=
=
, n = 1, 2, . . .
T
λ
2L µ
(3.52)
La frequenza
1
f1 =
2L
s
T
µ
(3.53)
è detta frequenza fondamentale. Le altre frequenze di oscillazione possibili (dette armoniche) sono tutte multipli di quella fondamentale. Si può affermare che le frequenze (e
quindi anche le lunghezze d’onda) sono quantizzate, e che la quantizzazione è l’effetto
delle condizioni al contorno imposte alle due estremità della corda.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
53
3.6. ANALISI E SINTESI ARMONICA
3.6
Analisi e sintesi armonica
3.6.1
Il principio di Fourier
Nel 1801, il matematico francese Fourier enunciò un famoso teorema.
Teorema di Fourier: una funzione periodica f (t) di periodo T può essere scomposta nella somma seguente di funzioni armoniche:
f (t) = a0 + a1 sin ωt + a2 sin 2ωt + · · · + b1 cos ωt + b2 cos 2ωt + . . .
(3.54)
dove ω = 2π/T .
Questa somma è detta serie di Fourier della funzione f (t), dove la frequenza ω è
detta fondamentale e le frequenze multiple 2ω, 3ω , . . . sono dette armoniche. Questo
fatto riveste un’importanza fondamentale, poiché ogni onda può essere scomposta, in un
unico modo, in onde armoniche che sovrapposte formano nuovamente l’onda iniziale.
3.6.2
Il timbro degli strumenti
Se due strumenti diversi suonano la stessa nota, il nostro orecchio percepisce due suoni
diversi. In questo caso si dice che le due note hanno un timbro diverso. Da cosa
dipende il timbro? Due strumenti, sebbene producano vibrazioni alla stessa frequenza
fondamentale, producono anche delle armoniche, le cui intensità relative dipendono
strettamente dallo strumento. Senza la produzione di armoniche, tutti gli strumenti
avrebbero lo stesso timbro. A questo proposito, bisogna introdurre la nozione di spettro
che mette in relazione le frequenze presenti nel suono e la loro relativa densità di energia,
ovvero quanto di quella componente di frequenza c’è nel suono.
La figura (3.15) mostra i grafici dell’onda di pressione in funzione del tempo per un
diapason, un clarinetto e una cornetta che suonano tutti la stessa nota.
Figura 3.15: Forma d’onda (a) di un diapason, (b) di un clarinetto e (c) di una cornetta,
con uguale intensità e frequenza
Come si può vedere, queste tre funzioni sono tutte periodiche, e possiedono lo stesso
periodo e quindi la stessa frequenza, ma solo il diapason è un’onda armonica pura. Le
altre due possiedono anche delle armoniche. La figura (3.16) mostra lo spettro, cioè
l’analisi delle armoniche nei tre casi precedenti.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
54
3.6. ANALISI E SINTESI ARMONICA
Figura 3.16: Spettro per (a) diapason, (b) clarinetto (c) cornetta
Come si può notare, il diapason contiene solo la frequenza fondamentale (si parla di
suono puro). Il clarinetto contiene quasi nella stessa misura le prime quattro armoniche
dispari. Per la cornetta, l’energia è concentrata principalmente nella terza armonica,
che è più presente della fondamentale.
I grafici (3.17) e (3.18) rappresentano lo spettro della stessa nota (un LA) suonata
da un pianoforte e da un violino. Come si può notare, nel pianoforte la fondamentale
domina mentre nel violino le prime quattro armoniche sono presenti quasi in egual
misura della fondamentale. Questo fatto spiega come mai il suono del violino risulta
più stridulo rispetto al pianoforte.
Figura 3.17: Spettro del LA suonato da un piano
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
3.6. ANALISI E SINTESI ARMONICA
55
Figura 3.18: Spettro del LA suonato da un violino
Ecco invece lo spettro del suono generato da piatti.
Figura 3.19: Spettro del suono di un crash
Salta subito all’occhio che non abbiamo più una distribuzione discreta (ovvero a
intervalli regolari) di frequenze, ma queste si estendono su un’ampia fascia, con la
fondamentale a circa 4000 Hz, fino ad arrivare a quasi 15000 Hz, con frequenze il cui
valore e la cui densità sembra essere quasi casuale. Questo è evidente all’orecchio:
il suono di piano e violino è infatti (quasi) periodico, mantiene fissa una nota (la
nota fondamentale), il piatto invece ha un suono molto più irregolare. Riusciremmo a
riconoscere la nota fondamentale, ma è chiaro che c’è una serie di suoni accessori non
collegati direttamente alla fondamentale. Inoltre bisogna aggiungere che lo spettro è
tanto più esteso quanto più il suono è corto. In generale i suoni percussivi (e i rumori)
hanno infatti uno spettro molto esteso.
Il processo inverso dell’analisi armonica è la sintesi armonica, vale a dire la costruzione di una forma d’onda periodica arbitraria mediante le sue componenti armoniche.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
3.7. QUALCHE NOZIONE DI MUSICOLOGIA
56
Questo è il principio dei sintetizzatori elettronici (detti anche moog dal loro inventore
Robert Moog) che producono una serie di armoniche le cui ampiezze possono essere
regolate arbitrariamente. Più armoniche vengono usate, migliore è l’approssimazione dell’onda e migliore è la qualità el sintetizzatore. I moog più sofisticati possono
produrre suoni simili a qualsiasi strumento di un orchestra.
3.7
3.7.1
Qualche nozione di musicologia
Assonanza e dissonanza
Già nell’antichità , era noto che due corde uguali, suonate assieme, producono un suono
gradevole quando le lunghezze vibranti stanno fra loro in rapporti interi semplici, come
ad esempio 1:2, 2:3, 3:5, ecc. Negli altri casi si ottiene una sensazione sgradevole.
Questa constatazione, di natura puramente empirica, sembra sottostare alla seguente
regola.
Due suoni danno un accordo piacevole (assonanza) quando hanno molte armoniche in
comune. In caso contrario, i suoni risultano dissonanti.
Infatti, guardando l’eq (3.53) per le frequenze di una corda in tensione, vale a dire
n
fn =
2L
s
T
,
µ
n = 1, 2, 3, . . .
(3.55)
si può notare che per un rapporto fra le lunghezze delle corde pari a 1:2, tutte le
armoniche del suono più alto sono già contenute nel suono più basso. In questo modo,
si ottiene il cosiddetto unisono, detto intervallo di ottava, che risulta molto gradevole.
Se invece si ha un rapporto fra le lunghezze pari a 2:3, il rapporto fra le frequenze
fondamentali f1 è di 3:2. Si realizza in questo modo l’intervallo di quinta dove metà
delle armoniche del suono più alto sono già contenute nel suono più basso.
Se i rapporti fra le lunghezze diventa più complicato, diminuisce sempre più il numero di armoniche in comune, e il suono risulta sempre meno gradevole. In particolare,
si constata che le combinazioni più gradevoli si ottengono quando il rapporto fra le
frequenze è esprimibile con due numeri interi. Nell’ordine di gradevolezza, si hanno i
rapporti 1:2, 3:2, 4:3, 5:4, 6:5, 8:5 e 5:3.
Queste combinazioni definiscono i cosiddetti intervalli che come vedremo prendono
il loro nome dalla quantità di note fra le due note, compresi gli estremi. Nella tabella
seguente, vengono caratterizzati gli intervalli consonanti principali.
Da una combinazione oculata di suoni, è possibile costruire una scala musicale, in
cui gli intervalli di frequenza fra successivi suoni seguono in qualche modo le regole
empiriche viste in precedenza. Senza entrare nei dettagli, vogliamo dare nel prossimo
paragrafo qualche informazione in merito alle due scale principali, quella diatonica (o
naturale) e quella ben temperata.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
57
3.7. QUALCHE NOZIONE DI MUSICOLOGIA
Nome
Note (in C maj) Rapporto f
(in C maj)
f /f0
Ottava
C-C
2
Quinta
C-G
3/2
Quarta
C-F
4/3
Terza maggiore
C-E
5/4
Terza minore
E-G
6/5
Sesta maggiore
C-A
5/3
Sesta minore
E-A
8/5
No semitoni
12
7
5
4
3
9
8
Tabella 3.1: Intervalli consonanti principali
3.7.2
La scala diatonica o naturale
La scala diatonica è una scala musicale che utilizza intervalli di frequenza rappresentati
dai rapporti fra gli interi più piccoli della serie armonica. Ci sono molte combinazioni
possibili di intervalli per costruire una scala diatonica. Cominciamo ad analizzare le
due principali, dette maggiore e minore.
La scala maggiore si basa sulla cosiddetta triade maggiore costituita da una
combinazione di suoni che hanno un rapporto 4:5:6 fra le loro frequenze fondamentali.
Prendendo il Do come punto di base, si sale di 5/4 (intervallo di terza maggiore) per
ottenere il Mi, e poi di 6/5 (intervallo di terza minore) ottenendo il Sol. Si ottiene
cosi un intervallo fra Sol e Do di 3/2 (intervallo di quinta). Il Do, che è la prima nota
della scala è detto la tonica, il Mi è detto la caratteristica e il Sol la dominante. Dalla
dominante, qui il Sol, è possibile costruire una seconda triade maggiore, ottenendo con
una terza maggiore la cosiddetta sensibile, il Si e con una terza minore la sopratonica,
il Re. Scendendo dal Do di una quinta, si ottiene la cosiddetta sottodominante, il Fa,
da cui con lo stesso schema si ottiene il La (la sopradominante) e poi di nuovo il Do.
In questo modo, si ottengono tutte le sette note della scala diatonica di Do, vale a dire
Do Re Mi Fa Sol La Si
che nella notazione anglossassone diventano
C D E F G A B
Queste note rappresentano di fatto i tasti bianchi nel pianoforte. D’ ora in poi useremo
spesso la seconda notazione.
Vediamo quindi che la scala maggiore si basa sulle tre triadi maggiori (4:5:6):
SUPSI-DTI
C,E,G o
Do-Mi-Sol
G,B,D o
Sol-Si-Re
Corso di Fisica e Modellistica
Prof. Andrea Danani
58
3.7. QUALCHE NOZIONE DI MUSICOLOGIA
Figura 3.20: Tasti del pianoforte
F,A,C
o
Fa-La-Do
Nella seguente tabella è esplicitato il risultato della costruzione:
1
9
8
5
4
4
3
3
2
5
3
15
8
2
C
D
E
F
G
A
B
C
9
8
10
9
16
15
9
8
10
9
9
8
16
15
Tabella 3.2: Rapporti fra le frequenze nelle note della scala diatonica maggiore rispetto
alla tonica C (sopra) e per note adiacenti (sotto)
Come si può notare dalla tabella, risultano tre tipi di intervalli per note adiacenti:
• quello maggiore (9/8),
• quello minore (10/9),
• il semitono (16/15).
Questi intervalli sono alla base della scala diatonica maggiore. Ogni scala maggiore
si basa su una nota che fungerà da tonica e dalla sequenza di intervalli indicati nella
prima riga della tabella (3.2).
Se la frequenza della tonica è f , la successione di frequenze sarà determinata quindi
da
9
5
4
3
5
15
f,
f,
f,
f,
f,
f,
f, 2f
8
4
3
2
3
8
Di fatto, le frequenze della scala diatonica di C (Do) sono calcolate utilizzando come
base A4 (La4 ) a 440 Hz, ciò che fornisce per il C4 264 Hz.
Quindi nell’ottava di una scala maggiore cinque degli intervalli sono toni (due semitoni), e due (il terzo e il settimo) sono semitoni: la successione degli intervalli che
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
59
3.7. QUALCHE NOZIONE DI MUSICOLOGIA
si incontrano eseguendo una scala dipende dalla nota con cui si comincia (la tonica) e
i cinque tasti neri aggiuntivi (i diesis (]) o bemolli ([)) permettono i salti di un semitono verso l’alto (]) o verso il basso ([) nelle scale diverse da quella di C in modo da
preservare la sequenza che definisce la scala.
Per le scale dette minori, si utilizzano le triadi che hanno un rapporto fra le
frequenze dato da 10:12:15. Queste sono date da:
A,C,E o
La-Do-Mi
E,G,B o
Mi-Sol-Si
D,F,A
Re-Fa-La
o
La costruzioni delle scale avviene come per le maggiori e le suddette triade danno luogo
a una scala con i rapporti fra le frequenze dati dalla tabella (3.3).
1
9
8
6
5
4
3
3
2
8
5
9
5
2
A
B
C
D
E
F
G
A
9
8
16
15
10
9
9
8
16
15
9
8
10
9
Tabella 3.3: Rapporti fra le frequenze nelle note della scala diatonica minore rispetto
alla tonica A (sopra) e per note adiacenti (sotto)
3.7.3
I modi
Nella musica dell’antica Grecia, la scala poteva cominciare da qualsiasi nota della scala
diatonica e i semitoni capitavano in una posizione diversa a seconda della nota da cui
si partiva; queste scale erano chiamate modi.
E’ quindi possibile costruire sette modi senza inserire alcuna alterazione, semplicemente ordinando la sequenza da un’altra nota. Questi modi sono elencati nella tabella
3.4
Come visto in precedenza per le scale maggiori e minori, tutti questi modi hanno
la caratteristica di possedere un gruppo di note fra cui vi sono due toni, come c - d - e,
ed un altro con tre toni, quali f - g - a - b, separati ognuno da due semitoni, quali quelli
fra e e f e quello fra b e c. Un ordinamento di questo tipo, tipico della scala diatonica,
ha una certa importanza, perché ad esempio scale medioorientali con sette note non
hanno questa caratteristica.
I modi greci scomparirono dalla musica durante i primi secoli dell’era cristiana e
furono rimpiazzati dai modi ecclesiastici che ebbero il loro periodo di maggior fulgore
dall’ 800 al 1500. Questi modi erano alla base del canto Gregoriano. Essi vennero
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
3.7. QUALCHE NOZIONE DI MUSICOLOGIA
Nome
Nota
iniziale
Ionio
Dorico
Frigio
Lidio
Missolidio
Eolio
Locrio
C
E
E
F
G
A
B
60
Scala
c-d-e-f-g-a-b
d-e-f-g-a-b-c
e-f-g-a-b-c-d
f-g-a-b-c-d-e
g-a-b-c-d-e-f
a-b-c-d-e-f-g
b-c-d-e-f-g-a
Tabella 3.4: Modi
impiegati anche in composizioni polifoniche come quelle di Palestrina. Anche se caddero
in disuso nel diciassettesimo secolo, qualcosa di questi modi sopravvive nella musica
popolare di alcuni paesi e qualche compositore li usa ancora. Generalmente però nella
musica occidentale sono sopravvissuti solo la scala maggiore e la scala minore che si
adattano meglio alla nostra armonia.
3.7.4
La scala temperata
Le due tabelle (3.2) e (3.3) illustrano in modo indiretto le difficoltà pratiche che si
incontrano utilizzando tali scale: ogni ottava richiede almeno una trentina di frequenze
diverse. Ciò rende molto difficile l’accordatura di strumenti che abbiano le note fissate
per suonare in una data tonalità. Per ovviare a questa difficoltà, è stata introdotta
la scala detta temperata. Questa scala rinuncia all’esattezza dei rapporti ideali e sostituisce ad essi una suddivisione dell’ottava in 12 intervalli in modo che il rapporto
fra due note adiacenti sia uguale per tutti gli intervalli. Questi 12 intervalli vengono
comunemente chiamati semitoni temperati. Dato che ogni semitono implica un fattore
q e che vi sono 12 intervalli, si dovrà avere che q 12 = 2. Questo implica che un semitono
√
ha un valore di 12 2 = 1.059463. Questo sistema trae origine da una pratica empirica
diffusa nel XVII secolo per l’accordatura degli strumenti a pizzico e che fu teorizzata
dal musicista tedesco Andreas Werkmeister nel 1691. I due volumi del Clavicembalo
ben temperato di J.S. Bach, contenenti ciascuno 24 preludi e fughe in tutte le tonalità
della scala temperata costituiscono una esemplificazione monumentale delle possibilità
compositive di questo sistema. Per mettere in risalto la differenza con la scala naturale,
la seguente tabella riporta le frequenze delle sette note nei due casi, assumendo come
base 440 Hz per il La4 .
Nel sistema temperato, diesis e bemolle vengono trattati in un modo più semplice.
Per esempio, nell’intervallo di sesta minore (8 semitoni con rapporto di frequenza 8/5),
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
61
3.7. QUALCHE NOZIONE DI MUSICOLOGIA
Nota
C/Do
D/Re
E/Mi
F/Fa
G/Sol
A/La
B/Si
Scale musicali e frequenze
Scala temperata Scala naturale
f (Hz)
f /fC
f (Hz) f /fC
261.63
1.000
264
1.000
293.66
1.122
297
1.125
329.63
1.260
330
1.250
349.23
1.335
352
1.333
392.00
1.498
396
1.500
440.00
1.682
440
1.667
493.88
1.888
495
1.875
Tabella 3.5: Confronto fra scala naturale e quella ben temperata
La[ dovrebbe avere un rapporto di frequenza pari a 1.6 per essere una terza maggiore
perfetta (5/4) dal Do superiore della scala. Per rendere l’intervallo Mi-Sol] una terza
maggiore naturale, il Sol] dovrebbe avere un rapporto di frequenza pari a (5/4)2 =
25/16 = 1.5625. Perciò Sol] e La[ non coincidono. Nel sistema temperato sia il Sol]
che il La[ sono rappresentati dallo stesso tasto nero con un rapporto di frequenza uguale
pari a q 8 = 1.587401. Come si vede, in questa scala, gli intervalli anche se leggermente
sbagliati, sono gli stessi in tutte le tonalità e quindi sono tutti ugualmente intonati (o
fuori tono).
Nella scala maggiore del sistema temperato, la successione dei toni (indicati con 2)
e dei semitoni (1) è (2,2,1,2,2,2,1), come risulta dalla tabella 3.2. Per fare un esempio,
costruiamo la scala maggiore di G, vale a dire la dominante della scala di C. Partendo
dal Sol (G) e riproducendo la sequenza precedente, otteniamo La (due semitoni SolSol ] e Sol ]-La),Si,Do,Re, Mi,Fa ],Sol. E’ necessario introdurre il Fa ] in quanto
l’intervallo Mi-Fa corrisponde solo a un semitono a cui va aggiunto il semitono Fa-Fa ]
per ottenere la sequenza giusta. L’ultimo semitono deriva dall’intervallo Fa ]-Sol.
Nella scala minore la successione degli intervalli è (2,1,2,2,1,2,2) (vedi tabella 3.3;
ci sono tre varianti della scala minore nelle quali gli ultimi tre intervalli possono essere
2,1,2 oppure 2,2,1 (melodica discendente che è il modo eolio e melodica ascendente) o
addirittura 1,3,1 (armonica). Nella scala di La minore ad esempio queste tre varianti
vengono ottenute introducendo il Fa ], il Sol ] , o entrambi al posto del Fa e del Sol
naturali.
Il sistema temperato soffre dell’approssimazione delle vere terze e quinte: ad esempio l’intervallo di terza (tra Do e Mi) che vale 1.25 nella scala naturale diventa 1.26
in quella temperata, un intervallo facilmente percepibile da un orecchio allenato. Ma
questa deficienza è largamente compensata dalla facilità dell’uso delle stesse note in
tutte le scale, il che permette facili modulazioni - vale a dire il passaggio da una scala
ad un’altra - e trasposizioni - cioè quando un brano originariamente in una scale viene
suonata in un’altra. Da ultimo si noti che, anche se questi concetti e metodi possono
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
3.7. QUALCHE NOZIONE DI MUSICOLOGIA
62
apparire difficili, in realtà non sono che la formalizzazione di conoscenze intuitive note
a tutti, dato che ogni persona che canta sa trasporre naturalmente un po’ più in alto
o in basso. Si dice anche che la scala ben temperata è in qualche modo sgradevole ai
musicisti dall’orecchio raffinato. Di fatto la maggior parte della gente, alcuni musicisti inclusi trovano difficile distinguere gli intervalli perfetti della scala naturale dagli
intervalli della scala temperata.
3.7.5
Caratteristiche degli intervalli musicali
Nella musica occidentale, soprattutto a partire dal ’700, è stata sviluppata in modo
molto marcato l’armonia, vale a dire l’arte di suonare molti suoni assieme. L’importanza dell’armonia ha però comportato la perdita di alcune caratteristiche musicali
che sono state invece sviluppate da altre civiltà . Ad esempio la musica indiana ha
mantenuto una larga varietà di modi mentre come abbiamo visto, la musica europea
ha ridotto tutto a soli due modi, quello maggiore e quello minore. La musica africana
ha sviluppato ritmi che variano durante lo svolgimento del brano e sovrapposizioni di
ritmi (poliritmo), mentre in occidente si è rimasti su ritmi con metri fissi a multipli di
2 e 3 (nei Balcani vengono usati anche metri a 5 e 7). Inoltre timbri e effetti speciali
sono quasi assenti per non disturbare l’effetto armonico.
Come già visto in precedenza, vi sono diversi intervalli possibili nella scala e il nome
dell’intervallo indica la quantità di note fra le due note, compresi gli estremi. E’ maggiore o minore a seconda di quanti semitoni ci sono nell’intervallo. Essere maggiore o
minore, come vedremo, influisce molto sul senso dell’intervallo. La definizione che ne
viene fornita normalmente non aiuta più di tanto a riconoscerli e distinguerli immediatamente, ad orecchio per cosi dire. Il fatto è che ogni intervallo ha una caratteristica
emotiva o comunque peculiare, che lo rende unico e riconoscibile.
Ovviamente la dimostrazione sta nello stesso ascolto dell’intervallo per il quale verranno dati alcuni esempi di musiche famose che lo contengono, in modo da constatarne
la personalità specifica, come se lo si estraniasse dalle due note che lo compongono e
assumesse un proprio carattere. Ecco un breve elenco:
• Intervallo di 6a: Sesta maggiore e Sesta minore
è detto l’intervallo del cuore, del sentimento. Questo intervallo suscita una varia
gamma di emozioni nel senso più letterario, classico della parola: come nostalgia,
innamoramento, gioia di stare assieme in compagnia, e anche lutto (se la sesta è
minore). Pensiamo alle note iniziali del tema del film Love story che rappresentano un intervallo di 6a minore. Oppure il famoso spot della Coca-cola Vorrei
cantare insieme a voi..., che richiama alla gioia dell’amicizia, cosi come il richiamo
nostalgico non avvilente in Azzurro di P. Conte, le cui prime due note formano
proprio una sesta maggiore.
• Intervallo di 3a: Terza maggiore e Terza minore
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
3.7. QUALCHE NOZIONE DI MUSICOLOGIA
63
è l’intervallo-melodico-base, quello primordiale e forma la prima melodia che sentiamo. Non per niente le ninna-nanna sono formate da intervalli di terza; cosi
come le canzoni popolari. E’ l’intervallo che più spesso fischiettiamo quando siamo sovrappensiero, quello più elementare! Pensiamo al famoso Giro-giro tondo o
Fra Martino Campanaro: sono intervalli di terza. Il pop è pieno di famosi cantati
con le terze (Ticket to ride e Hey Jude dei Beatles). La facilità d’intonazione gli
permette di essere usato anche in situazioni più colte come un passaggio armonico che permette di spostarsi senza perdere il senso della melodia (ad esempio il
galoppo nella Cavalcata delle Valchirie di Wagner).
• Intervallo di 8a :
è l’intervallo che suggerisce la potenza, che dà forza, un’esclamazione ineluttabile,
di cui non si può dubitare come nell’inizio della Nona Sinfonia di Bruckner. Inizia
con un intervallo di 8a anche Singing in the rain, conferendo subito una grossa
spinta alla composizione.
• Intervallo di 2a:
qui si tratta di un effetto derivante dalla struttura delle scale. E’ un intervallo
che funge da breve spostamento o per arrivare alla melodia dell’intervallo di
3a o per lasciare in sospeso la melodia prima che torni alla nota iniziale. E’
comunque un passo, che sospende in attesa che succeda qualcosa da definire
(l’inizio della beatlesiana Yesterday). Può essere usato apposta per bombardare
l’orecchio in attesa della soluzione, come in Centro di gravità permanente di
Battiato. In particolare va rilevato che la seconda minore ha un uso ulteriore:
quello di esprimere dolore, lamento o comunque destabilizzazione; soprattutto se
si sposta l’intero accordo (avanti o indietro di un semitono)
• Intervallo di 7a:
è chiaramente un intervallo che suona esagerato, fuori misura, teso. Si sente
che la melodia creata dall’intervallo è sbilanciata e ha bisogno di un’immediata
soluzione: in genere si torna indietro alla tonica (la nota base delle melodie,
quella che da il senso di riposo). Da ascoltare ad esempio Give peace a chance di
Lennon, tra is e give nel ritornello ...all we are saying is give peace a chance....
Discorso a parte e più complesso per gli intervalli di Quinta e di Quarta(es. Do-Sol,
Do-Fa ): sono gli intervalli strutturali, su di loro poggiano le melodie per concludersi o
per svilupparsi. A seconda del loro uso aprono o chiudono o semplicemente permettono
la continuazione del suonare. Bisogna sempre usare il buon senso e capire che tali
posizioni e significati possono cambiare e assumere sfumature più variegate a seconda
del contesto della specifica composizione o del ritmo impresso alla melodia. Il senso
generale qui esposto rimane, tuttavia, abbastanza valido e universale.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
3.7. QUALCHE NOZIONE DI MUSICOLOGIA
SUPSI-DTI
Corso di Fisica e Modellistica
64
Prof. Andrea Danani
Capitolo 4
Fenomeni elettrici
4.1
4.1.1
Carica elettrica e legge di Coulomb
Proprietà delle cariche elettriche
L’esistenza di forze e di cariche di natura elettrica fu verificata attraverso l’ osservazione
che alcuni materiali strofinati sulla lana erano in grado di attrarre piccoli pezzi di carta.
In tali circostanza si dice che tali corpi risultano elettrizzati o elettricamente carichi. Nel
1734 il botanico francese Charles DuFay rivelò l’esistenza di due differenti tipi di carica
elettrica alla quale fu attribuito da Benjamin Franklin nel 1747 la denominazione di
positiva o negativa. Tale caratteristica viene evidenziata, ad esempio, dal fatto che una
bacchetta di bachelite che sia stata strofinata con un panno di lana e sospesa ad un filo
metallico viene attratta da una barretta di vetro strofinata con un panno di seta mentre
viene respinta da una bacchetta di bachelite elettrizzata. Il processo dell’elettrizzazione
per strofinio mette, per altro, in luce la manifestazione di un’importante principio. In
tale circostanza non viene a crearsi della carica ma questa viene trasferita da un corpo
ad un’altro; cosi, se un corpo acquista una carica positiva, l’altro acquista la medesima
quantità di carica negativa. La conoscenza della struttura dell’atomo rivela che nei
processi di elettrizzazione per strofinio alcuni elettroni della bacchetta sono strappati
dall’azione abrasiva e vengono trasferiti al panno. Ciò porta a concludere che la carica
totale si conserva in ogni processo. Nel 1909 Robert Millikan verificò sperimentalmente
che la carica elettrica si presenta sempre in multipli interi di un’unità fondamentale
di carica e, ovvero la carica che si osserva risulta quantizzata esistendo sempre in
quantità discrete. Pertanto la carica q di un corpo si può sempre esprimere come
± N e , dove N è un numero intero. In particolare un elettrone ha carica −e mentre
un protone ha carica +e ; un atomo neutro contiene lo stesso numero di elettroni e
di protoni. Nel 1785 Charles Augustin de Coloumb, facendo uso di una bilancia a
torsione verificò che la forza elettrica tra due corpi carichi puntiformi è proporzionale
all’inverso del quadrato della reciproca distanza. Alla luce di queste considerazioni
possiamo riassumere brevemente le proprietà delle cariche elettriche stazionarie:
65
4.1. CARICA ELETTRICA E LEGGE DI COULOMB
66
• Ci sono due tipi di cariche elettriche, con la caratteristica che cariche diverse si
attraggono mentre cariche uguali si respingono;
• La carica si conserva;
• La carica è quantizzata;
• La forza tra cariche puntiformi è inversamente proporzionale al quadrato della
mutua distanza.
4.1.2
Isolanti e conduttori
Originariamente si riteneva che i metalli non potessero essere caricati, ad esempio, per
strofinio; tuttavia una bacchetta metallica sostenuta da un materiale come il vetro, può
caricarsi. Ciò perché in tali materiali la carica si distribuisce rapidamente in tutto il
corpo e l’interposizione del vetro tra il metallo ed il sostegno, rappresentato ad esempio
dalla mano dell’operatore, impedisce il flusso della carica verso la terra.
Cosi vetro e bachelite sono detti isolanti: la carica in tali materiali viene a localizzarsi in una regione del corpo e non si sposta; viceversa, in genere, i metalli sono
conduttori: la carica tende a ridistribuirsi rapidamente nel corpo. Collegando attraverso un filo conduttore un materiale conduttore a terra (messa a terra) si agevola il flusso
delle cariche verso tale corpo che agisce, quindi, come una sorta di serbatoio infinito
di carica. Un procedimento alternativo all’elettrizzazione per strofinio prende il nome
di elettrizzazione per induzione. Avvicinando un corpo carico, ad esempio negativamente, ad un conduttore neutro, la regione più prossima al corpo carico si carica di
segno opposto mentre quella più lontana si carica dello stesso segno (di fatto gli elettroni del corpo neutro si spostano lasciando scoperta della carica positiva). Se il corpo,
anziché essere isolato è connesso a massa, alcuni elettroni fluiscono verso massa, per
cui, interrompendo la connessione il corpo resta carico positivamente. Allontanando
successivamente il corpo carico la carica della sfera si distribuisce uniformemente nel
corpo originariamente neutro per effetto della mutua repulsione delle cariche uguali.
Infine un isolante può caricarsi per polarizzazione. Nelle molecole neutre i baricentri
delle cariche positive e negative in genere coincidono; tuttavia in presenza di un corpo carico i baricentri si spostano caricando in modo non uniforme la molecola. Ciò
determina la generazione di una carica indotta sulla superficie dell’isolante.
4.1.3
La legge di Coulomb
La legge che esprime l’intensità della forza elettrica che si esercita fra due particelle
puntiformi cariche, rispettivamente di carica q1 e q2 , a riposo, poste alla mutua distanza
r è data dalla relazione:
| q1 || q2 |
.
(4.1)
F =k
r2
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
4.1. CARICA ELETTRICA E LEGGE DI COULOMB
67
Tale formula esprime la legge di Coulomb. L’unità di misura della carica è il coulomb
(C). La costante k che compare nell’espressione della legge di Coulomb vale:
k = 8.98 × 109 N m2 /C 2
e per definizione risulta:
k=
1
4πε0
dove
ε0 ≈ 8.85 × 10−12 C 2 /N m2 .
è detta costante dielettrica del vuoto. La carica libera più piccola è quella dell’elettrone
e risulta:
| e | ≈ 1.60 × 1019 C
cosi 1C è la carica di circa 6.3 × 1018 elettroni.
Vettorialmente, se r̂ rappresenta il versore diretto da q1 a q2 , allora la forza elettrica
esercitata su q2 per effetto di q1 è:
F~21 =
1 q1 q2
r̂ ,
4πε0 r2
(4.2)
inoltre dalla legge di azione-reazione segue che la forza agente su q1 da q2 è data da
F~12 = −F~21 (vedi Fig.4.1).
Figura 4.1: Forza di Coulomb
Se ci sono più cariche, la forza tra una coppie di cariche può essere ricavata dalla
legge di Coloumb e la risultante è quindi la somma vettoriale delle forze dovute alle
singole cariche; cioè le forze elettriche obbediscono al principio di sovrapposizione.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
4.2. CAMPO E POTENZIALE ELETTROSTATICO
4.2
4.2.1
68
Campo e potenziale elettrostatico
Campo elettrico
~ il rapporto tra la forza F~ che agisce su una carica
Si definisce vettore campo elettrico E
di prova positiva q0 ed il valore di tale carica, vale a dire:
~
~ = F ,
E
q0
(4.3)
e tale grandezza si misura in N/C.
Il concetto di campo consente di interpretare diversamente l’azione che si esplica tra
due corpi carichi: è possibile rivedere tale interazione come l’interazione tra una carica
ed il campo prodotto dall’altra carica, senza dover far ricorso all’azione a distanza
(interazione diretta e istantanea) suggerita dalla legge di Coloumb. I mutamenti di
posizione della carica che si assume dia origine al campo si propagano nello spazio
alla velocità della luce in accordo con la teoria della relatività. Assegnata una carica
puntiforme q posta a distanza r dalla carica di prova q0 , secondo la legge di Coloumb
(4.2), il campo elettrico prodotto dalla carica puntiforme q è dato da
~
~ = F = 1 q r̂ ,
E
q0
4πε0 r2
(4.4)
Nella Fig. (4.2) è mostrato il campo elettrico prodotto in corrispondenza di una carica
di prova da una carica puntiforme positiva, in alto, e negativa, in basso.
Figura 4.2: Campo elettrico con +q e −q
Come conseguenza del principio di sovrapposizione, se E~1 , E~2 , . . . , E~N sono i campi
prodotti da N cariche, allora il campo complessivo è:
~ =E
~1 + E
~2 + · · · + E
~N
E
SUPSI-DTI
Corso di Fisica e Modellistica
(4.5)
Prof. Andrea Danani
69
4.2. CAMPO E POTENZIALE ELETTROSTATICO
In particolare, per un sistema di N cariche puntiformi q1 , q2 , . . . , qN poste rispettivamente alle distanze r1 , r2 , . . . , rN dal punto in cui è stata posta la carica di prova, si
ha:
N
1 X qi
~
E=
rˆi ,
(4.6)
4πε0 i=1 ri2
dove come prima i vettori r̂i sono i versori fra la carica qi e la carica di prova.
4.2.2
Linee di forza del campo elettrico
Le linee di forza consentono una immediata visualizzazione della distribuzione spaziale
del campo elettrico. Le loro caratteristiche sono:
• Il vettore campo elettrico è tangente
alle linee di forza in ogni punto
• Il numero di linee di forza per unità di
superficie che attraversano una superficie ad esse perpendicolare è proporzionale all’intensità del campo elettrico in
corrispondenza della superficie.
Nell’esempio in figura, siccome la densità delle linee che attraversano la superficie
A è superiore a quella delle linee che attraversano la superficie B, il campo elettrico in
A è maggiore del campo in B.
Le regole per disegnare le linee di forza per una distribuzione di carica sono:
• le linee di forza devono avere origine dalle cariche positive e terminare sulle cariche
negative o all’infinito qualora il sistema abbia un eccesso di carica;
• il numero di linee di forza che entrano o escono da una carica è proporzionale alla
carica;
• due linee di forza non si possono incrociare.
Figura 4.3: Linee di forza del campo elettrico prodotto da due cariche puntiformi di
segno opposto (sinistra) e uguale (destra)
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
70
4.2. CAMPO E POTENZIALE ELETTROSTATICO
Il metodo di rappresentazione del campo elettrico attraverso le linee di forza presenta tuttavia alcune limitazioni. Innanzitutto la sua efficacia è circoscritta alla descrizione
di campi statici essendo piuttosto complessa la rappresentazione dei campi generati da
cariche in movimento; inoltre con questo metodo è impossibile applicare il principio di
sovrapposizione.
4.2.3
Il dipolo elettrico
Il sistema costituito da due cariche uguali ma
opposte q poste alla mutua distanza d prende il nome di dipolo elettrico. Calcoliamo il
campo elettrico in un punto situato lungo la
linea mediana perpendicolare alla retta congiungente le cariche e posto alla distanza x
dalla congiungente stessa (si veda la figura
~+ e E
~ − i campi
a fianco). Indicando con E
prodotti da ciascuna carica, per il principio
di sovrapposizione si ha:
~ =E
~+ + E
~− ,
E
dove
1
1 q
q
=
.
2
2
4πε0 r
4πε0 x + d2
Dato che (E− )x = −(E+ )x , il campo sarà diretto lungo l’asse y e varrà:
E+ = E− =
E = (E+ )y + (E− )y = 2E+ cos ϑ ,
cos ϑ = √
d
x2 + d 2
da cui si ottiene che
E=2
q
d
1
p
1
√
=
2
2
2
2
2
4πε0 x + d x + d
4πε0 (x + d2 )3/2
(4.7)
dove p = q (2d) è detto momento di dipolo elettrico. In molte applicazioni risulta utile
stabilire il campo elettrico a grande distanza dal dipolo, ossia per x d. In questo
caso, troncando l’equazione (4.7) al primo termine dello sviluppo in serie, si ottiene:
"
"
#
2 #−3/2
2
1 p
d
1 p
3 d
1 p
E=
1+
1−
+ ... ≈
=
3
3
4πε0 x
x
4πε0 x
2 x
4πε0 x3
Analogamente, si può provare che per un punto posto lungo l’asse y, a grande distanza
r dal dipolo, si ha:
1 p
E≈
.
4πε0 y 3
I due risultati appena riportati costituiscono un’indicazione di una caratteristica generale del dipolo; è infatti possibile provare che a distanza r dal dipolo, con r d, il
campo elettrico varia come 1/r3 .
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
71
4.2. CAMPO E POTENZIALE ELETTROSTATICO
4.2.4
Distribuzioni continue di cariche
Qualora la separazione fra le singole cariche di un certo insieme e molto piccola rispetto
alla distanza dal punto in cui si vuole calcolare il campo, è possibile considerare tale
insieme come una distribuzione continua di carica. Consideriamo pertanto una certa
distribuzione di carica e valutiamo il campo elettrico in un punto P . Il contributo al
campo di un elemento ∆q di carica è:
~ =
∆E
1 ∆q
r̂ ,
4πε0 r2
dove r è la distanza dell’elemento ∆q da P (vedi Fig.4.4). Chiamiamo con ∆qi l’i-esimo
elemento di carica che costituisce la distribuzione di carica. Se la separazione fra tali
elementi e piccola rispetto alla distanza dal punto P , la distribuzione può ritenersi
continua, cosi, nel limite ∆qi → 0 si ha:
Z
1 X ∆qi
1
dq
~
∆E =
rˆi =
r̂,
(4.8)
2
4πε0 i ri
4πε0 Q r2
dove l’integrazione è estesa a tutta la carica Q che costituisce la distribuzione.
Figura 4.4: Campo elettrico di un elemento di carica ∆q
Allo scopo di eseguire tale calcolo si rende opportuno introdurre il concetto di
densità di carica. In particolare, se la carica è distribuita in un volume si definisce la
densità di carica volumetrica ρ come
ρ=
dq
.
dV
(4.9)
Da notare che ρ è una funzione della posizione, vale a dire ρ = ρ(~r) dove il vettore ~r
spazzola tutta la carica, e si misura in C/m3 . In modo analogo si definiscono le densità
di carica superficiale σ = dq/dS e la densità di carica lineare λ = dq/dl. Naturalmente,
qualora una carica q è uniformemente distribuita in un volume V o su di una superficie
S o lungo una linea l allora si ha, rispettivamente, ρ = q/V , σ = q/S e λ = q/l.
ESEMPIO 4.1. Campo elettrico generato da un filo lungo e sottile che porta una densità
lineare λ di carica.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
72
4.3. LA LEGGE DI GAUSS
Soluzione: Suddividiamo il filo in piccoli tratti di lunghezza dx, portanti una carica dq =
λdx. L’intensità del campo elettrico prodotto dall’elemento dx in P a una distanza d dal filo
è
1 λdx
dE 0 =
4πε0 r2
ed il campo è diretto come indicato in Fig.(4.5). Per la simmetria del problema, le componenti
parallele al filo si annullano e rimangono solo le componenti radiali date da dE 0 cos θ.
Figura 4.5: Campo elettrico di un filo carico infinito
Il campo elettrico risultante sarà perciò dato da:
Z
Z
Z
dx
λ
0
cos θ .
E = dE = dE cos θ =
4πε0
r2
Dalla figura, risulta r = d/ cos θ e x = d tan θ, per cui dx = (d/ cos2 θ) dθ. Facendo le debite
sostituzioni, integrando su metà filo da θ = 0 a θ = π/2 (se poniamo per semplicità L → ∞)
e moltiplicando per un fattore due, si ottiene:
Z π/2
2λ
λ
E=
cos θ dθ =
.
4πε0 d 0
2πε0 d
Pertanto il campo elettrico varia come d−1 .
4.3
4.3.1
La legge di Gauss
Introduzione
La legge di Gauss è una riformulazione della legge di Coulomb che risulta particolarmente utile quando il sistema in esame presenta certe simmetrie. Di fondamentale
importanza nella legge di Gauss è un’ipotetica superficie chiusa chiamata superficie
gaussiana. Essa può avere qualsiasi forma ma verrà scelta con una simmetria simile
a quella del problema: si tratterà spesso di una sfera, un cilindro, o qualsiasi altra
forma simmetrica. Deve comunque essere sempre una superficie chiusa, in modo che si
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
73
4.3. LA LEGGE DI GAUSS
possa fare una distinzione tra i punti all’interno e quelli all’esterno della superficie. La
legge di Gauss mette poi in relazione i campi sulla superficie gaussiana con le cariche
racchiuse all’interno.
4.3.2
Flusso di un campo vettoriale
Consideriamo un campo vettoriale ~v e supponiamo
che le linee di forza corrispondenti siano tutte parallele tra loro. Consideriamo una superficie di area
S disposta perpendicolarmente alle linee di forza (si
veda la figura a fianco). Poiché il numero di linee
di forza per unità di area di un vettore è proporzionale al modulo del vettore, una misura del numero
di linee di forza passanti attraverso la superficie è
proporzionale al prodotto vS . Questa grandezza
prende il nome di flusso φ del vettore ~v attraverso la
superficie S: φ = vS
Qualora la superficie forma un angolo θ con le linee
di forza di ~v risulterà:
φ = vS cos θ ,
(4.10)
essendo il numero di linee che attraversa S pari al
numero di linee che attraversa l’area proiettata S 0 ,
perpendicolare al campo (si veda la figura).
Se si definisce un versore normale n̂ alla superficie S, si può definire il flusso φ come:
~
φ = ~v · n̂S = ~v · S
(4.11)
~ = n̂S
dove il vettore superficie è definito da S
Nel caso generale il vettore ~v può variare in corrispondenza dei punti della superficie S attraverso la
quale si vuole calcolare il flusso; cosi per poter applicare la precedente definizione occorre suddividere tale superficie in elementi infinitesimi ds in corrispondenza dei quali la variazione del vettore ~v può essere
considerata trascurabile, allora il flusso elementare
di ~v attraverso ds sarà:
~
dφ = ~v · dS
SUPSI-DTI
(4.12)
Corso di Fisica e Modellistica
Prof. Andrea Danani
74
4.3. LA LEGGE DI GAUSS
Pertanto la misura del numero di linee di forza del campo ~v che attraversano tale
superficie è:
Z
φ=
~
~v · dS
(4.13)
S
Poiché in generale la superficie può anche essere
chiusa (si veda la figura), occorre stabilire una convenzione circa il verso di n̂. In questo contesto tale
versore è scelto uscente dalle superfici chiuse. Con
questa convenzione il prodotto ~v · n̂ sarà positivo laddove il campo è uscente dalla superficie considerata
e sarà negativo dove il campo è entrante.
4.3.3
La legge di Gauss
La legge di Gauss mette in relazione il flusso netto φ del campo elettrico attraverso
una superficie chiusa con la carica netta Qint che è racchiusa all’interno della superficie.
Vale a dire:
ε0 φ = Qint
(4.14)
che con la definizione di flusso derivante dall’equazione (4.13) applicata al campo
~ diventa
elettrico E
I
~ · dS
~ .
φ=
E
(4.15)
S
Il cerchietto sul segno di integrale indica che l’intera superficie su cui viene calcolato
l’integrale è una superficie chiusa.
Se la carica è esterna alla superficie chiusa (si veda la figura) il numero di linee di
forza entranti è pari a quello delle linee uscenti, cosi il flusso totale del campo elettrico
che attraversa una superficie chiusa che non circonda alcuna carica è nullo. Per questo
motivo, nell’equazione (4.14) si fa riferimento solamente alla carica interna Qint .
Le equazioni (4.14) e (4.15) valgono solo per cariche nel vuoto o in aria. Per
includere il caso di mezzi materiali, quali olio, mica, vetro, ecc, bisogna apportare
alcune modifiche alle equazioni.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
75
4.3. LA LEGGE DI GAUSS
Vediamo ora di dedurre la legge di Coulomb da quella di Gauss. A questo proposito consideriamo una
carica positiva puntiforme q posta al centro di una
sfera gaussiana di raggio r (vedi figura a fianco). Per
~ è radiale,
ragioni di simmetria, il campo elettrico E
quindi perpendicolare alla superficie, e si dirige dal~ e dS
~ è nullo,
l’interno verso l’esterno. L’angolo fra E
quindi la legge di Gauss si può scrivere in questo caso
come
I
I
~
~
ε0 E · dS = ε0 E dS = q
(4.16)
S
S
Ma dato che il campo elettrico è costante su tutta la sfera, può essere portato fuori
dall’integrale, quindi
I
ε0 E dS = q .
(4.17)
S
Nell’integrale non rimane che il contributo dei dS che sommati danno semplicemente
la superficie della sfera, vale a dire 4πr2 , perciò
ε0 E(4πr2 ) = q
(4.18)
ossia
1 q
4πε0 r2
che corrisponde proprio alla legge di Coulomb.
E=
(4.19)
ESEMPIO 4.2. Consideriamo un filo di lunghezza infinita lungo il quale e uniformemente
distribuita una carica con densita lineare λ. Si desidera conoscere il valore del campo elettrico
in tutto lo spazio.
Soluzione: La simmetria della distribuzione di carica suggerisce che il campo elettrico deve
essere perpendicolare al filo carico e uscente. Consideriamo una superficie cilindrica S di
raggio r e lunghezza l coassiale col filo (nella figura, in alto; in basso la superficie e mostrata
in sezione); il flusso attraverso le superfici di base e nullo essendo il campo elettrico parallelo
a tali superfici, quindi:
I
I
~
φ(E) =
E dS = E
dS = 2πrlE .
S
S
D’altra parte per la legge di Gauss risulta che:
~ = 2πrlE = q/ε0 = λl/ε0 ,
φ(E)
pertanto
E=
SUPSI-DTI
1 λ
.
2πε0 r
Corso di Fisica e Modellistica
Prof. Andrea Danani
76
4.4. CONDUTTORI IN EQUILIBRIO ELETTROSTATICO
Si osservi che se il filo non è infinito viene a cadere la simmetria e diventa inutile l’applicazione della legge di Gauss per la determinazione del campo elettrico; tuttavia questo risultato
resta valido per un filo di lunghezza finita L nel limite r L per punti sufficientemente
distanti dalle estremità del filo.
4.4
Conduttori in equilibrio elettrostatico
Dal punto di vista microscopico, un buon conduttore elettrico può essere generalmente
rappresentato come un reticolo atomico immerso in un gas di elettroni liberi di muoversi
all’interno del materiale. In assenza di un moto netto degli elettroni in una particolare
direzione, il conduttore è detto in equilibrio elettrostatico. In tale circostanza valgono
le seguenti proprietà:
• Il campo elettrico all’interno del conduttore è ovunque nullo;
• Un qualunque eccesso di carica su conduttore deve localizzarsi superficialmente.
• All’esterno del conduttore, in prossimità della superficie, il campo elettrico è
perpendicolare alla superficie ed ha intensita pari a σ/ε0 , dove σ è la densita
superficiale di carica.
• Su un conduttore di forma irregolare la carica tende ad accumularsi nei punti in
cui la curvatura della superficie è maggiore, ovvero sulle punte
La prima proprietà può essere compresa considerando una lastra conduttrice immersa in un campo elettrico. All’applicazione del campo, gli elettroni si muovono verso
sinistra causando un accumulo di carica negativa a sinistra e positiva a destra. Queste
cariche creano un campo elettrico opposto al campo esterno; la densità superficiale
di carica cresce fino a che l’intensità di questo campo non uguagli quella del campo esterno, dando luogo ad un campo nullo all’interno del conduttore; i tempi tipici
per raggiungere tale condizione di equilibrio sono dell’ordine di 10−16 sec per un buon
conduttore.
Consideriamo un conduttore in equilibrio elettrostatico; all’interno del conduttore consideriamo una superficie chiusa S prossima quanto si vuole alla superficie
del conduttore (si veda la figura a fianco). Poiché
all’interno del conduttore il campo elettrico è nullo,
dalla legge di Gauss segue che all’interno della superficie S è quindi del conduttore la carica netta è nulla.
Pertanto se il conduttore è carico, tale carica deve
situarsi sulla superficie.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
77
4.4. CONDUTTORI IN EQUILIBRIO ELETTROSTATICO
Consideriamo ora un conduttore carico all’equilibrio e facciamo riferimento ad una superficie S a
forma di cilindro con le superfici di base A sufficientemente piccole da potersi ritenere localmente
parallele alla superficie del conduttore e con parte del cilindro contenuta nel conduttore (vedi figura a sinistra). Attraverso la parte interna il flusso
del campo elettrico è nullo essendo nullo il campo
elettrico internamente al conduttore.
Inoltre il campo è normale alla superficie perché qualora vi fosse una componente tangenziale determinerebbe un moto delle cariche e quindi una condizione di non equilibrio.
Perciò è nullo il flusso anche attraverso la superficie laterale del cilindro. Cosı̀ il flusso
attraverso la superficie del cilindro è En A essendo En il campo elettrico in prossimità
della superficie esterna del conduttore. Applicando la legge di Gauss alla superficie del
cilindro si ha quindi:
Z
~ · dS
~ = σA = q ,
E
ε0
ε0
S
~ · n̂,
dove σ è la densita locale di carica superficiale. Ne segue che, siccome En è pari a E
dove n̂ è il versore normale alla superficie del conduttore, allora:
~ = σ n̂ ;
E
ε0
tale espressione prende il nome di Teorema di Coloumb. L’ultima proprietà elencata
dei conduttori in equilibrio sarà provata nel paragrafo (4.5.5).
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
78
4.5. IL POTENZIALE ELETTRICO
4.5
4.5.1
Il potenziale elettrico
Definizione
Abbiamo già visto che le forze di tipo centrale, che dipendono cioè solo dalla sola
distanza da un centro, sono forze conservative; quindi anche la forza espressa dalla
legge di Coulomb appartiene a questa categoria. Se una carica q0 è immersa in un
~ la forza F~ a cui è soggetta vale q0 E.
~ Il lavoro fatto da questa forza in
campo E,
corrispondenza di uno spostamento infinitesimo d~l della carica vale:
~ · d~l
dL = F~ · d~l = q0 E
(4.20)
Per definizione, il lavoro fatto da una forza conservativa è pari alla variazione di energia
potenziale dU cambiata di segno:
~ · d~l .
dU = −dL = −q0 E
(4.21)
In corrispondenza di uno spostamento finito di q0 dal punto A al punto B, la variazione
di energia potenziale è data da:
Z B
~ · d~l ,
∆U = UB − UA = −q0
E
(4.22)
A
~ conservativo. La
dove l’integrale non dipende dal cammino scelto essendo il campo E
differenza di potenziale tra i punti A e B è definita come la variazione dell’energia
potenziale per unità di carica, ovvero:
Z B
UB − UA
~ · d~l .
∆V = VB − VA =
=−
E
(4.23)
q0
A
In generale si usa assumere che la funzione potenziale elettrostatica si annulla all’infinito; allora, ponendo V (∞) = 0, il potenziale in corrispondenza di un generico punto
P vale:
Z P
~ · d~l ,
VP = −
E
(4.24)
∞
espressione che può essere riguardata come il lavoro necessario per trasportare una
carica unitaria dall’infinito al punto P.
L’unità di misura del potenziale è il volt (V) e risulta 1V = 1J/1C, cosi 1 V
rappresenta il lavoro che deve essere fatto per far superare ad una carica di 1C una
differenza di potenziale di 1V . L’introduzione del volt consente inoltre di riscrivere
l’unità di misura del campo elettrico in V /m che rappresenta l’unità tradizionalmente
più usata per questa grandezza. In fisica atomica e nucleare è d’uso comune per la
misura dell’energia l’elettronvolt (eV ), definito come l’energia che un elettrone (o un
protone) acquista quando viene accelerato mediante una differenza di potenziale di 1V .
Siccome 1V = 1J/1C e la carica dell’elettrone (protone) è di 1.6 × 10−19 C, si ha che
1eV = 1.6 × 10−19 C · V = 1.6 × 10−19 J
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
79
4.5. IL POTENZIALE ELETTRICO
4.5.2
Cariche puntiformi
Calcoliamo la differenza di potenziale tra i punti A e
B (vedi figura a fianco):
Z
B
VB − VA = −
~ · d~l
E
A
dove
~ =
E
1 q
r̂ .
4πε0 r2
Tenendo conto che r̂ · d~l = cosθdl = dr, si ottiene che:
r
Z rB
1
q
1
q 1 B
1
q
.
VB − VA = −
dr =
−
=
4πε0 rA r2
4πε0 r rA
4πε0 rB rA
(4.25)
Assumendo che il potenziale sia nullo per rA → ∞, il potenziale dovuto a una carica
puntiforme è dato da:
1 q
V (r) =
.
(4.26)
4πε0 r
Il potenziale V possiede quindi il segno della carica q.
Poiché V è uniforme su una superficie sferica di raggio r (cioè ra = rB nell’espressione 4.25), concludiamo
che le superfici equipotenziali per una carica puntiforme sono delle sfere concentriche alla carica stessa
e tali superfici risultano perpendicolari alla direzione
delle linee di campo. Nella figura a fianco, è mostrata
la sezione (in tratteggio) delle superfici equipotenziali
per una carica puntiforme.
Come conseguenza del principio di sovrapposizione, il potenziale in un certo punto,
dovuto a più cariche puntiformi è pari alla somma dei potenziali di ciascuna carica
calcolati in tale punto:
1 X qi
V =
(4.27)
4πε0 i ri
ponendo con ri la distanza fra qi e il punto sotto esame, sempre con l’ipotesi che il
potenziale sia nullo all’infinito.
Si definisce anche l’energia potenziale elettrica di un sistema di cariche puntiformi.
Questa energia è uguale al lavoro che si deve compiere dall’esterno per portare il sistema
nella configurazione indicata, spostando le cariche dall’infinito alla loro posizione. Per
due cariche q1 e q2 distanti r12 , è facile dimostrare che l’energia potenziale U della
coppia è
1 q1 q2
U=
.
4πε0 r12
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
80
4.5. IL POTENZIALE ELETTRICO
4.5.3
Potenziale dovuto a una distribuzione continua di carica
Quando una distribuzione di carica è continua, la sommatoria dell’equazione (4.27)
non è più applicabile. Per trovare il potenziale V in un punto P , si deve scegliere un
elemento infinitesimo di carica dq e determinare il potenziale dV nel punto P dovuto
a dq, vale a dire:
1 dq
dV =
.
4πε0 r
Poi si deve integrare sull’intera distribuzione di carica:
Z
1
dq
V =
.
4πε0 Q r
In molti casi, viene data la densità di carica ρ che descrive come la carica è distribuita
nel volume V , da cui si ricava ρ = dq/dV , cioè dq = ρdV . Il calcolo del potenziale si
riduce quindi a un integrale di volume dato da:
Z
1
ρdV
V =
.
(4.28)
4πε0 V r
Va notato il fatto che l’equazione (4.28) non presenta componenti vettoriali perché il
potenziale elettrico è una funzione scalare.
ESEMPIO 4.3. Consideriamo una bacchetta di lunghezza l uniformemente carica con
densità di carica lineare λ e valutiamo il potenziale a una distanza y dall’estremità sinistra
della bacchetta.
Soluzione: si consideri un elemento infinitesimo dx della bacchetta, come mostrato nella
figura a fianco. Questo elemento porta una carica infinitesima pari a dq = λ dx. Il contributo
al potenziale della carica dq vale:
1 dq
1
λdx
dV =
=
,
2
4πε0 r
4πε0 (x + y 2 )1/2
e integrando da x = 0 a x = l, si trova:
l
!
p
l2 + y 2 )
.
y
λ
V =
4πε0
Z
4.5.4
Relazione tra campo elettrico e potenziale
0
dx
λ
=
log
4πε0
(x2 + y 2 )1/2
l+
Dall’equazione (4.23), si ricava che
~ · d~l = −dV .
E
Sviluppando i due termini in coordinate cartesiane, si ha che:
∂V
∂V
∂V
Ex dx + Ey dy + Ez dz = −
dx +
dy +
dz .
∂x
∂y
∂z
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
81
4.5. IL POTENZIALE ELETTRICO
Confrontando le due espressioni, segue che:
Ex = −
∂V
,
∂x
Ey = −
∂V
,
∂y
Ez = −
∂V
.
∂z
(4.29)
~ in
Quindi, conoscendo la funzione V (x, y, z), si possono trovare le componenti di E
ogni punto calcolando il gradiente di V .
4.5.5
Potenziale in un conduttore carico isolato
Poiché all’interno di un conduttore all’equilibrio, il campo elettrico è nullo, tutti i punti
interni al conduttore sono allo stesso potenziale e anche la superficie del conduttore, in
particolare, è una superficie equipotenziale.
Quale ulteriore proprietà dei conduttori carichi all’equilibrio, è possibile provare
che ad esclusione dei conduttori sferici, la carica superficiale tende ad accumularsi nei
punti in cui la curvatura della superficie è maggiore, ovvero in prossimità delle punte.
Di conseguenza, il campo elettrico esterno può assumere in quelle zone dei valori molto
alti.
Per comprendere questo fenomeno consideriamo due
sfere conduttrici di raggi, rispettivamente R+ e R2
, con R1 < R2 , collegate elettricamente tra loro
tramite un filo conduttore. Se σ1 e σ2 indicano le
densità superficiali di carica sui due conduttori, le
cariche rispettive saranno:
q1 = 4πR12 σ1
,
q2 = 4πR22 σ2
e facendo il rapporto membro a membro, segue:
q1
R 2 σ1
= 12 .
q2
R2 σ2
(4.30)
D’altra parte, siccome sono connesse con un conduttore, le due sfere sono allo stesso
potenziale; assumendo che la distanza tra le sfere sia tale da poter assumere che la
carica su una non abbia alcun effetto sulla distribuzione di carica dell’altra, segue che
il comune valore V del loro potenziale è:
V =
1 q1
1 q2
=
4πε0 R1
4πε0 R2
da cui segue che:
R1
q1
=
,
q2
R2
e confrontando con l’espressione (4.30), si ottiene finalmente:
σ1
R2
=
,
σ2
R1
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
82
4.6. CAPACITÀ ELETTRICA E DIELETTRICI
Dato che R1 < R2 , avremo che σ1 > σ2 , cioè la sfera più piccola ha una maggiore densità
di carica superficiale; ciò implica che il campo elettrico è più intenso in prossimità della
sfera più piccola.
4.6
4.6.1
Capacità elettrica e dielettrici
Capacità
La capacità elettrica di un conduttore isolato è definita come il rapporto fra la sua
carica e il suo potenziale,
Q
C=
.
(4.31)
V
La capacità di un conduttore sferico di raggio R, ad esempio, è data da:
C=
Q
= 4πε0 R
V
(4.32)
dato che V = Q/(4πε0 R). Da notare che la capacità è costante non solo per il conduttore sferico, come si vede dalla (4.32), ma per qualsiasi conduttore carico di qualsiasi
forma geometrica. L’unità di misura della capacità è il Farad, definito come F = CV −1 .
4.6.2
Condensatori
Il concetto di capacità elettrica può essere esteso a un sistema di conduttori. Consideriamo il caso di due conduttori aventi carica Q e −Q. Se V = V1 − V2 è la loro
differenza di potenziale, la capacità del sistema è definita in modo analogo alla (4.31),
vale a dire:
Q
Q
C=
=
.
(4.33)
V
V1 − V2
Un dispositivo di questo tipo viene detto condensatore e i conduttori in questo caso
prendono il nome di armature.
Nella figura a fianco è mostrato il simbolo adoperato nella schematizzazione dei circuiti elettrici per rappresentare il
condensatore.
ESEMPIO 4.4. Consideriamo due armature piane, parallele, della stessa superficie S e
distanti d. Calcolare la capacità di tale condensatore.
Soluzione: la densità σ con cui è distribuita la carica su ciascuna armatura vale, in valore
assoluto, Q/S. Se la distanza tra le armature è molto più piccola della lunghezza e larghezza
della armature, si possono trascurare gli effetti ai bordi ed assumere che il campo elettrico
nella regione compresa tra le armature sia uniforme e valga:
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
83
4.6. CAPACITÀ ELETTRICA E DIELETTRICI
E=
Q
σ
=
ε0
ε0 S
pertanto la differenza di potenziale tra le armature è:
V = Ed =
Q
d,
ε0 S
cosi applicando la definizione segue che
C=
Q
ε0 S
=
V
d
ESEMPIO 4.5. I condensatori possono essere combinati in due modi diversi: in serie e
in parallelo. Discutine la combinazione.
Soluzione: Consideriamo due condensatori originariamente scarichi, rispettivamente di capacità C1 e C2 collegati come mostrato in figura. In tale connessione, detta in serie, il valore assoluto della carica su ciascuna armatura deve essere la stessa. Ciò è conseguenza del fatto
che la carica totale racchiusa nel volume tratteggiato di
figura deve essere nulla;
infatti la carica inizialmente presente su queste armature è nulla e, siccome la connessione
col generatore determina la sola separazione delle cariche, la carica totale su queste armature
resta nulla. Si avrà quindi:
V = V1 + V2 =
Q
Q
+
=Q
C1 C1
1
1
+
C1 C2
che implica per la capacità del sistema che
1
1
1
=
+
C
C1 C2
In generale, per N condensatori in serie, la capacità totale è l’inverso della somma dei
reciproci delle singole capacità, vale a dire:
1
1
1
1
=
+
+ ··· +
.
C
C1 C2
CN
SUPSI-DTI
Corso di Fisica e Modellistica
(4.34)
Prof. Andrea Danani
84
4.6. CAPACITÀ ELETTRICA E DIELETTRICI
Nella combinazione in parallelo, le armature sono sottoposte a una comune differenza di potenziale (vedi figura)
e le cariche presenti su ciascun condensatore sono Q1 =
C1 V , Q2 = C2 V . La carica totale Q immagazzinata su
entrambe le coppie è pari a:
Q = Q1 + Q2 = (C1 + C2 )V
per cui C = C1 + C2 . Per N condensatori in parallelo di
capacità C1 , C2 , . . . , CN , la capacità equivalente è quindi:
C = C1 + C2 + · · · + CN
4.6.3
(4.35)
Energia immagazzinata in un campo elettrico
Il caricare un condensatore richiede una spesa di energia dato che bisogna compiere
un lavoro per vincere la repulsione della carica già presente. Questo lavoro ha come
risultato un aumento dell’energia del conduttore.
Consideriamo a questo proposito un condensatore costituito da due conduttori di forma generica, uno con
carica +q e potenziale V1 e l’altro con carica −q e potenziale V2 , con V1 > V2 . Supponiamo di accrescere,
attraverso un circuito esterno, la carica in valore assoluto su entrambi i conduttori di una stessa quantità dq
, ossia, in particolare, di portare la carica del primo
conduttore da q a q + dq e la carica del secondo conduttore da −q a −q − dq. Cioè è come se la carica dq
fosse stata spostata dall’armatura a potenziale minore
all’armatura a potenziale maggiore.
Il lavoro dL che è necessario spendere contro la forza del campo elettrico in questa
operazione è dato dall’espressione dL = (V1 − V2 )dq, dove la differenza di potenziale
V1 − V2 può essere espressa attraverso la capacità C del sistema come V1 − V2 = q/C.
Questo lavoro incrementerà in egual misura l’energia U del sistema, ovvero dU = dL,
quindi:
qdq
.
dU =
C
L’aumento complessivo di energia del sistema quando la carica passata è Q (pari al
lavoro fatto durante il processo) è quindi:
Z Q
qdq
Q2
1
U=
=
= CV 2 .
(4.36)
C
2C
2
0
Consideriamo un condensatore piano tra le cui armature, di superficie S e separazione d, è applicata una differenza di potenziale V . La densità di energia u, cioè l’energia
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
85
4.6. CAPACITÀ ELETTRICA E DIELETTRICI
potenziale per unità di volume fra le armature sarà uniforme dato che il campo elettrico
è costante. Si ha che:
U
1
1
1 S
1
1
u=
= CV 2
= ε0 V 2
= ε0
Sd
2
Sd
2 d Sd
2
2
V
d
Sapendo che V = Ed, sostituendo nella relazione precedente, si trova:
1
u = ε0 E 2
2
(4.37)
Sebbene provata in un caso particolare, si verifica che tale relazione è di validità
generale e indica che in presenza di un campo elettrico esiste, allo stesso tempo, un
campo di energia con densità u . Pertanto, l’energia immagazzinata in un volume ν in
~ è pari all’integrale su tale volume dell’espressione
cui è presente un campo elettrico E
precedente:
Z
Z
1
U = udν = ε0 E 2 dν .
(4.38)
2
ν
ν
4.6.4
Polarizzazione della materia: dielettrici
In questo paragrafo vogliamo discutere l’effetto di un campo elettrico sulla materia. A
questo proposito, distinguiamo due categorie differenti di molecole.
• Molecole polari: sono molecole caratterizzate
da un momento di dipolo intrinseco. Ad esempio,
nell’acqua (si veda la figura) il momento di dipolo
della molecola è presente anche senza che vi sia
applicato alcun campo elettrico esterno; siccome
la molecola può essere assimilata ad un sistema
rigido, i due momenti p~1 e p~2 si sommano vettorialmente producendo un momento di dipolo intrinseco di circa 6.2 × 10−3 Cm. Quando non c’e’
un campo elettrico esterno, le molecole si orientano a caso e non producono nessun momento dipolo
netto.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
4.6. CAPACITÀ ELETTRICA E DIELETTRICI
86
• Molecole apolari: sono molecole prive di un momento di dipolo intrinseco. In questi materiali
l’applicazione di un campo elettrico esterno può
determinare la generazione di un momento di dipolo. Consideriamo ad esempio una molecola monoatomica; questa può essere schematizzata come
un nucleo centrale carico positivamente e circondato da una nube sferica carica negativamente. In
condizioni normali la molecola è neutra ed inoltre i baricentri delle cariche positive e negative
coincidono. L’applicazione di un campo elettrico
esterno determina una deformazione della molecola provocando la separazione dei baricentri delle
due cariche nella direzione del campo applicato.
Ciò determina la formazione di un momento di
dipolo di tipo indotto.
~ deterNel caso dei materiali polari, invece, l’applicazione di un campo elettrico E
minerà l’azione sui momenti di dipolo elementari p~. La configurazione di equilibrio,
corrispondente ad un minimo dell’energia potenziale di interazione tra il dipolo elet~ sono paralleli, vale a dire quando è nullo
trico ed il campo esterno si ha quando p~ e E
il momento torcente. L’allineamento in verità non è mai completo poiché l’agitazione termica vi si oppone. Il grado di allineamento aumenta quindi al diminuire della
temperatura e all’aumentare dell’intensità del campo elettrico.
Quando le molecole (o atomi) di un materiale divengono dipoli elettrici orientati
nella direzione del campo elettrico esterno, si parla di polarizzazione. Un mezzo che può
essere polarizzato da un campo elettrico viene chiamato un dielettrico. Un dielettrico
introdotto tra le armature di un condensatore ne determina un aumento della capacità.
Se il dielettrico satura lo spazio compreso tra le armature, la capacita aumenta di un
fattore adimensionale εr > 1 che prende il nome di costante dielettrica relativa del
materiale.
Analizziamo in dettaglio i fenomeni microscopici che
hanno luogo nella regione di dielettrico compresa tra
le armature del condensatore. All’applicazione di una
differenza di potenziale tra le armature del condensatore, su queste si creeranno delle distribuzioni di carica
superficiale di densità pari (in valore assoluto) a σ. Il
~ 0 che si genera di conseguenza detercampo elettrico E
mina l’orientazione dei dipoli elementari nella propria
direzione. Mentre le cariche interne al materiale vengono a due a due bilanciate, le cariche che si affacciano
alle superfici delle armature restano scoperte.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
4.6. CAPACITÀ ELETTRICA E DIELETTRICI
87
Si creano quindi due ulteriori distribuzioni di carica di densità pari (in valore assoluto) a σP ; in particolare σP < 0 in corrispondenza dell’armatura carica positivamente
(dove σ > 0) e σP > 0 in prossimita dell’altra armatura (dove σ < 0); si osservi che la
carica associata a σP non è libera, nel senso che non può muoversi nel materiale ma è
solo un effetto dell’orientazione dei dipoli elementari.
La presenza della carica di polarizzazione determina,
all’interno della regione compresa tra le armature, la
~ P diretto come
creazione di un nuovo campo elettrico E
~ 0 ma di verso opposto. Il campo
il campo esterno E
totale presente all’interno del materiale è quindi:
E = E0 − EP
Perciò risulta che il campo elettrico agente sul materiale dielettrico ha intensità inferiore a quella del campo
applicato.
Il campo esterno può essere espresso tramite la densità di carica superficiale σ, vale
a dire E0 = σ/ε0 , mentre il campo prodotto dalle cariche di polarizzazione può essere
espresso come E0 = σP /ε0 . Ne consegue che
1
E = E0 − EP = (σ − σP )
(4.39)
ε0
Il risultato dell’applicazione di un campo esterno è l’acquisizione da parte di ogni molecola di un momento
medio h~pi parallelo al campo esterno E~0 . Sia n il numero di molecole per unità di volume e h~pi il momento
di dipolo medio delle molecole, allora una misura del
grado di allineamento delle molecole di un dielettrico è
data dal vettore P~ definito come:
P~ = n h~pi .
Tale grandezza prende il nome di vettore polarizzazione. E’ possibile stabilire l’intensità del vettore polarizzazione tra le armature del condensatore osservando che l’insieme
dei dipoli allineati dal campo elettrico è assimilabile ad un unico dipolo orientato nel
verso del campo esterno E~0 , quindi il modulo del vettore polarizzazione è la risultante
di tutti i dipoli, ovvero il prodotto della carica di polarizzazione qP per la distanza d
diviso per il volume compreso tra le armature, cioè Sd:
qP d
qP
P =
=
= σP ;
(4.40)
Sd
S
Si noti che essendo σP < 0, il vettore P~ è diretto nel senso positivo.
~ e P~ sono vettori aventi la stessa direzione, si introduce un nuovo campo
Dato che E
vettoriale, chiamato vettore spostamento elettrico definito da
~ = ε0 E
~ + P~ .
D
SUPSI-DTI
Corso di Fisica e Modellistica
(4.41)
Prof. Andrea Danani
4.6. CAPACITÀ ELETTRICA E DIELETTRICI
88
~ è espresso in C/m2 e sia n̂ la normale alla superficie di un’armatura del condensatore,
D
vale che
~ · n̂ = σ
D
~
Nella maggior parte dei dielettrici risulta che P~ è proporzionale al campo elettrico E:
~ ;
P~ = ε0 χe E
(4.42)
La quantità adimensionale χe prende il nome di suscettività dielettrica del mezzo materiale e fornisce un’indicazione circa la capacità che ha il mezzo di polarizzarsi sotto
l’azione di un campo elettrico. Sostituendo la (4.41) nella (4.42) si trova:
~ = ε0 E
~ + ε0 χe E
~ = ε0 (1 + χe )E
~ ;
D
(4.43)
da cui si ricava che εr = 1 + χe , e che finalmente:
~ = ε0 εr E
~ .
D
SUPSI-DTI
Corso di Fisica e Modellistica
(4.44)
Prof. Andrea Danani
Capitolo 5
Campi magnetici
5.1
Introduzione
Un altro tipo di interazione osservata in natura è quella chiamata magnetica. Secoli
prima di Cristo si osservò che certi minerali di ferro come la magnetite avevano la
proprietà di attrarre piccoli pezzi di ferro. Questa proprietà è mostrata alla stato
naturale da ferro, cobalto e manganese e da molti composti di questi metalli e non è
apparentemente in relazione con l’interazione elettrica, perché nè palline di sughero, nè
pezzi di carta sono attrati da questi minerali. Pertanto un nuovo nome, magnetismo
1
, fu dato a questa proprietà fisica.
Un corpo magnetizzato è chiamato un magnete. Nel XVII secolo, lo scienziato
inglese W. Gilbert riusci a spiegare il comportamento della bussola, supponendo che la
Terra fosse un grande magnete. Sperimentando con magneti si vede che tra essi agiscono
forze attrattive e repulsive; si può quindi introdurre il concetto di polo magnetico,
analogamente a quello della carica elettrica. Poli dello stesso tipo si respingono e poli
di tipo opposto si attirano. I poli vengono chiamati Nord e Sud, riferendosi all’ago di
una bussola.
In elettrostatica il campo elettrico è stato introdotto come mediatore dell’ interazione tra cariche. Un approccio analogo è stato tentato anche per descrivere i fenomeni
magnetici. Ma anche se vi sono teorie che prevedono l’esistenza del monopolo magnetico, di fatto non è stato ancora possibile isolare un polo magnetico e quidi questo
approccio si rivela inadeguato. In effetti un magnete possiede sempre due poli opposti:
spezzando una sbarretta magnetica, si riformano sempre poli opposti alle estremità.
Le interazioni elettiche e magnetiche sono connesse molto strettamente e di fatto
sono solo due differenti aspetti di una sola proprietà della materia, la sua carica elettrica; per questo motivo le due interazioni devono essere considerate insieme sotto il
nome più generale di interazione elettromagnetica. Il magnetismo è una manifestazione
1
Il nome magnetismo è derivato dall’antica città dell’Asia Minore chiamata Magnesia dove secondo
la tradizione, il fenomeno fu per la prima volta notato
89
90
5.2. FORZA DI LORENTZ
di cariche elettriche in moto: i campi magnetici sono prodotti da cariche in moto e sono
avvertiti solo se le cariche sono, a loro volta, in movimento.
5.2
Forza di Lorentz
Prescindendo per il momento dalle sorgenti del campo magnetico, valutiamo come si
esplica l’interazione tra un campo magnetico e una particella carica. Allo scopo assumiamo che la particella non sia soggetta ad altri campi, al di fuori di quello magnetico
che supponiamo sia uniforme. Sperimentalmente, si verifica che qualora la carica sia in
quiete, su di essa non si esercita alcuna forza. Supponiamo che la particella sia dotata
di una certa velocità; in tal caso si osservano alcuni effetti sul suo moto che non sono
ascrivibili ad altri campi, in quanto, per ipotesi, assenti. Ciò suggerisce l’esistenza di
una certa forma di interazione tra la particella in moto e il campo magnetico presente
nella regione considerata.
~ è il vettore associato al
Sperimentalmente, se B
campo magnetico, q e ~v sono, rispettivamente, la carica e la velocità della particella, la forza F~ agente
sulla particella vale:
~ .
F~ = q~v × B
(5.1)
Si noti che la relazione (5.1) rende impossibile la de~ attraverso una singola miterminazione del vettore B
~
sura; infatti, mentre in elettrostatica, misurando q E
si può risalire sia all’intensità che all’orien-tazione di Figura 5.1: Forza di Lorentz
~ nel caso del magnetismo, la forza è sempre perpendicolare al piano definito dai vetE,
~ indipendentemente dall’angolo θ compreso tra ~v e B,
~ perciò l’orientazione di
tori ~v e B,
~ non può essere stabilita. A tale scopo si puo ricercare l’angolo in corrispondenza del
B
quale la forza espressa dalla (5.1) si annulla, per poi stabilire, con una seconda misura,
~
l’intensita di B.
L’unità di misura del campo magnetico è il Tesla (T) 1 . Dall’espressione (5.1) segue
che una carica di 1 C che si muove in un campo magnetico di 1 T con la velocità di
1 m/s perpendicolarmente al campo, è soggetta ad una forza di 1 N , cosi:
[B] = T =
N
A×m
Va ricordato che è ancora molto diffusa l’unità di misura denominata Gauss (G),
definita da:
1 G = 10−4 T .
~ ed un campo magnetico B
~ su
Se agiscono contemporaneamente un campo elettrico E
una particella di carica q in moto con velocità ~v , la forza totale agente sulla particella
1
in onore dell’ingegnere americano di origine jugoslava Nicholas Tesla (1856-1943)
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
91
5.3. MOTO DI UNA CARICA IN UN CAMPO MAGNETICO
è data da:
~ + q~v × B
~
F~ = q E
(5.2)
F~ è detta forza di Lorentz e rappresenta la somma della forza elettrica e magnetica
cui può essere, in generale, sottoposta una particella carica.
5.3
Moto di una carica in un campo magnetico
Consideriamo dapprima una particella di massa m e carica q immersa ad un campo
~ con velocità iniziale v~0 giacente su di un piano perpendicolare
magnetico uniforme B,
~ In queste condizioni l’unica forza che agisce è la forza di Lorentz.
alla direzione di B.
Quindi, nel suo moto, la particella è sottoposta ad una forza di modulo costante, normale
alla velocita, e pertanto possiamo concludere che
la particella compie un moto circolare uniforme.
L’equazione di Newton fornisce quindi:
m
v02
= qv0 B
R
ossia
Figura 5.2:
Lorentz
mv
R=
qB
Moto con forza di
La velocità angolare è data da:
ω=
v
q
= B.
R
m
Il fatto che ω dipenda solo dal rapporto carica/massa e dal campo B può essere sfruttato
per misurare le masse di ioni distinguendo i vari isotopi.
Supponiamo ora che la velocita v~0 formi un angolo θ con la direzione del campo
~ Decomponendo il vettore v~0 lungo le direzioni parallela e perpendicolare
magnetico B.
~ si hanno, rispettivamente i vettori ~v0⊥ e ~v0k , tali che ~v0⊥ = v0 sin θ e ~v0k =
a B
v0 cos θ, e usando la legge di Lorentz, si ottiene che il moto della particella lungo
~ è rettilineo uniforme con velocita pari a v0 cos θ, mentre
la direzione parallela a B
~ il moto è circolare uniforme, con raggio di curvatura R e periodo
ortogonalmente a B
T dati, rispettivamente, dalle relazioni:
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
92
5.4. L’EFFETTO HALL
R=
mv0⊥
mv sin θ
=
,
qB
qB
T =
2πm
qB
(5.3)
Pertanto, la traiettoria descritta dalla particella
è un’elica cilindrica (vedi figura a fianco) il cui
passo p vale:
p = v0 T =
5.4
2πmv0 cos θ
qB
L’effetto Hall
Nel 1879, il fisico americano E.C Hall (1855-1929) scopri che quando una lastra metallica lungo la quale passa una corrente I è posta in un campo magnetico perpendicolare
alla lastra, appare una differenza di potenziale tra i punti opposti sui bordi della piastra.
Figura 5.3: L’effetto Hall
Questo fenomeno, detto appunto effetto Hall, è una tipica applicazione della forza
di Lorentz. Supponiamo dapprima che i portatori della corrente elettrica nella lastra
metallica siano elettroni, aventi una carica negativa q = −e. Con l’asse Z parallelo
alla corrente I, il moto effettivo è nella direzione −Z con velocità ~v− (5.4a). Se il
~ è applicato perpendicolarmente alla lastra, nella direzione X, gli elettroni
campo B
~ che è diretta lungo l’asse +Y . Pertanto, gli
sono soggetti alla forza F~ = −e~v− × B
elettroni vengono trasportati verso il lato destro della lastra, che diviene cosi carico
negativamente. Il lato sinistro di conseguenza si carica positivamente e si produce un
~ parallelo all’asse Y . Quando la forza (−e)E
~ sugli elettroni diretta
campo elettrico E
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
5.5. FORZA MAGNETICA SU UNA CORRENTE ELETTRICA
93
verso sinistra bilancia la forza magnetica verso destra, ne risulta l’equilibrio. Si produce
quindi una differenza di potenziale tra bordi opposti, con il lato sinistro al potenziale
più alto. Questo è l’effetto Hall normale o negativo, mostrato nella maggior parte dei
metalli, come oro, argento, platino, rame, ecc. Ma con alcuni metalli, come cobalto,
zinco, ferro e altri materiali, come i semiconduttori, si produce un effetto Hall opposto,
o positivo. Per spiegare la differenza, supponiamo che i portatori di corrente siano
particelle cariche positivamente con q = +e. La loro velocità sarà nella direzione della
corrente, cioè lungo l’asse Z, come in Fig.(5.4b). La forza magnetica è diretta verso
l’asse +Y , ma poiché le cariche sono positive, il lato destro si carica positivamente e il
campo elettrico risultante è nella direzione −Y e la differenza di potenziale è opposta
a quella dell’effetto Hall normale.
Questo effetto in origine appariva in contraddizione con la convinzione che gli unici
portatori della corrente in un conduttore fossero elettroni. Tuttavia nei materiali sopra
citati, a causa di qualche difetto nella struttura cristallina, vi sono posti in cui vi è la
mancanza di un elettrone, una cosiddetta lacuna elettronica. Quando un elettrone si
muove e riempie una lacuna, si produce una lacuna nella posizione originaria, per cui
le lacune si muovono nella direzione opposta a quella degli elettroni sotto l’azione del
campo elettrico applicato. Per questo motivo, l’effetto Hall fornisce un metodo assai
utile per determinare il segno dei portatori della corrente elettrica in un conduttore.
Da notare che nel caso dei metalli, l’effetto Hall produce tensioni generalmente molto
piccole, dell’ordine dei µV .
5.5
Forza magnetica su una corrente elettrica
Come noto, la corrente elettrica è un flusso di cariche elettriche in moto. L’intensità
della corrente è definita come la carica passante nell’unità di tempo attraverso una
sezione del conduttore. Consideriamo una sezione di un conduttore attraverso il quale
sono in moto con velocità ~v particelle con carica q. Se ci sono n particelle per unità
di volume, il numero totale di particelle passanti attraverso l’unità di area per tempo
è n~v , e la densità di corrente, definita come la carica passante per l’unità di area per
unità di tempo è il vettore:
~j = nq~v
(5.4)
Se S è l’area in sezione del conduttore, orientata perpendicolarmente a ~j, la corrente è
lo scalare
I = jS = nqvS .
(5.5)
~ la forza per unità di volume
Se il conduttore viene immerso in un campo magnetico B,
sarà:
~ = ~j × B
~ .
f~ = nq~v × B
(5.6)
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
5.6. COPPIA MAGNETICA SU UNA CORRENTE ELETTRICA
94
La forza totale su un elemento infinitesimo di volume dV sarà dF~ = f~dV = ~j ×
~
BdV
, e la forza totale su un volume finito si ottiene integrando su tutto il volume:
Z
~
~
~j × BdV
F =
.
(5.7)
V
Se si considera il caso in cui la corrente scorre lungo un filo, dV = Sdl e pertanto
Z
~
~
F = ~j × BSdl
.
(5.8)
L
Ora ~j = j~uT , dove ~uT è il versore tangente all’asse del filamento e dato che la corrente
I = jS è la stessa in tutti i punti del conduttore, si ottiene per la forza su un conduttore
percorso da una corrente elettrica che:
F~ =
Z
~
(j~uT )×BSdl
=
L
Z
~ =I
(jS)~uT ×Bdl
Z
~
~uT ×Bdl
L
L
(5.9)
Nel caso di un conduttore rettilineo di lunghezza L in un campo magnetico uniforme, dato
R
che L dl = L, si ottiene
~
F~ = IL~uT × B
(5.10)
Il conduttore è perciò soggetto a una forza perpendicolare al suo asse e al campo magnetico.
Questo è il principio sul quale funzionano i motori elettrici.
5.6 Coppia magnetica su
corrente elettrica
Figura 5.4:
una conduttore
Forza su un filo
Possiamo applicare l’eq.(5.10) per calcolare la coppia dovuta alla forza che un campo
magnetico produce su un circuito elettrico. Per semplicità consideriamo una spira
rettangolare percorsa da una corrente I e immersa in un campo magnetico uniforme
~ diretto normalmente ad una coppia dei suoi lati.
B,
Trascuriamo il campo magnetico prodotto dalla spira stessa e supponiamo quindi
che tale spira sia vincolata ad un asse passante per il punto medio di una coppia dei
suoi lati, in modo da poter ruotare attorno a questo asse (si veda la figura 5.6) 1 .
Analizziamo le singole forze agenti su ciascun tratto della spira. Le forze F~ 0 agenti
sui lati inferiore e superiore di lunghezza L0 hanno lo stesso modulo ma verso opposto.
Esse tendono a deformare il circuito ma non producono nessun momento.
1
L’azione del campo magnetico uniforme sulla spira non vincolata determina una forza risultante
nulla
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
5.6. COPPIA MAGNETICA SU UNA CORRENTE ELETTRICA
95
Figura 5.5: Spira rettangolare immersa in un campo magnetico
L’intensità delle forze agenti sui lati verticali della spira è in modulo F = IBL e
anche in questo caso le due forze hanno lo stesso modulo e la stessa direzione, con verso
opposto; tuttavia tali forze non condividono la medesima retta di applicazione. Per la
coppia di forze F~ il momento torcente τ risulta quindi diverso da zero; per la singola
forza questo momento ha intensità pari a:
L0
sin θ ,
(5.11)
2
~ Dato che entrambi i momenti hanno
dove θ è l’angolo tra la normale ~n alla spira e B.
uguali intensità , direzioni e versi, il momento totale τ sarà il doppio di τF , perciò
abbiamo:
L0
τ = 2τF = 2F sin θ = IBLL0 sin θ
(5.12)
2
D’altra parte, il prodotto LL0 rappresenta l’area S della spira, cosi, introducendo il
vettore
m
~ = IS n̂ ,
(5.13)
τF = F
la relazione (5.12) diventa
τ = mB sin θ
che in notazione vettoriale diventa
~
~τ = m
~ ×B
(5.14)
Perciò il sistema raggiunge l’equilibrio meccanico quando τ = 0, ovvero per θ = 0, cioè
~ em
quando la spira si dispone perpendicolarmente al campo magnetico e i vettori B
~
risultano allineati.
Il vettore m
~ definito nella relazione (5.13) dell’esempio precedente prende il nome di
momento di dipolo magnetico; il suo verso segue la regola della mano destra, nel senso
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
96
5.7. LA LEGGE DI BIOT SAVART
che, se si associa il verso della corrente nella spira a quello delle dita della mano destra
che si chiudono sul palmo della mano, il verso di m
~ punta nella direzione indicata dal
pollice nella Fig.(5.6).
Figura 5.6: Momento di dipolo magnetico
5.7
La legge di Biot Savart
Nel 1820, il fisico danese H.C. Oersted (1777-1851) notando la deviazione dell’ago di
una bussola posta vicino a un conduttore attraverso cui passava corrente, fu il primo
a osservare che una corrente elettrica produce un campo magnetico nello spazio che la
circonda.
Dopo molti esperimenti, è stata ottenuta un’espressione generale per calcolare il campo magnetico prodotto da una corrente chiusa di forma qualsiasi. Questa
espressione, chiamata legge di Biot-Savart, è:
~ =
dB
µ0 I~uT × ~ur
dl ,
4π
r2
(5.15)
Figura 5.7: Campo madove il significato dei simboli è indicato nella Fig.(5.7).
gnetico di una corrente
Considerando la sovrapposizione dei contributi di tut- elettrica
ti gli elementi d~l che compongono il conduttore L, si
ottiene
I
µ0 I
~uT × ~ur
~
B=
dl ,
(5.16)
4π L
r2
Occorre notare le somiglianze tra l’espressione della legge di Biot-Savart relativa al
magnetismo e l’espressione della legge di Coloumb dell’elettrostatica. Mentre una carica
puntiforme determina un campo elettrico, un elemento di corrente Id~l produce un
campo magnetico; inoltre, nello stesso modo in cui il campo elettrico prodotto da
una carica puntiforme dipende dalla distanza r, cosi l’intensità del campo magnetico
dipende dall’inverso del quadrato della distanza dall’elemento di corrente. Tuttavia le
direzioni dei due campi risultano completamente differenti. Il campo elettrico generato
da una carica puntiforme è radiale mentre il campo magnetico prodotto da un elemento
di corrente è perpendicolare sia all’elemento di corrente che al raggio vettore ~r.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
97
5.8. APPLICAZIONI DELLA LEGGE DI BIOT-SAVART
5.8
Applicazioni della legge di Biot-Savart
5.8.1
Campo magnetico di una corrente rettilinea
Come prima applicazione della formula (5.16), stabiliamo il campo magnetico presente
in un punto P posto a distanza R da un filo conduttore rettilineo percorso da una
corrente stazionaria I.
Figura 5.8: Campo magnetico prodotto da una corrente rettilinea e linee di campo
corrispondenti
Riferendosi alla Fig.(5.8), per ogni punto P e ogni elemento dl della corrente, la
direzione del vettore ~uT × ~ur è quella del versore ~uθ . Il campo magnetico in P è quindi
tangente al cerchio di raggio R che passa attraverso P . Perciò è necessario trovare
~ Il modulo di ~uT × ~ur è sin θ, poiché ~uT e ~ur sono versori.
solamente il modulo di B.
Quindi per una corrente rettilinea, possiamo scrivere l’Eq.(5.16) in modulo come
µ0 I
B=
4π
Z
∞
−∞
sin θ
dl
r2
(5.17)
Dalla Fig.(5.8) si deduce che r = R/ sin θ e l = −R/ tan θ, da cui segue che dl =
(R/ sin2 θ)dθ. Sostituendo in (5.17), si trova
µ0 I
B=
4π
Z
0
π
sin2 θ R
µ0 I
sin θ 2
2 dθ =
R sin θ
4πR
Z
π
sin θ dθ ,
(5.18)
0
dove l = −∞ corrisponde a θ = 0 e l = +∞ a θ = π. Quindi, si ottiene
µ0 I
(5.19)
2πR
Le linee di forza sono cerchi concentrici alla corrente e nella Fig.(5.8) è indicata la
regola della mano destra per determinare la direzione del campo magnetico relativo
alla direzione della corrente.
B=
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
5.8. APPLICAZIONI DELLA LEGGE DI BIOT-SAVART
98
Per un filo di lunghezza finita, basta modificare i limiti di integrazione nell Eq.(5.18)
usando gli angoli θ1 e θ2 sottesi dagli estremi del filo e il punto P . Si ottiene:
µ0 I
4πR
5.8.2
Z
θ2
sin θ dθ =
θ1
µ0 I
(cos θ1 − cos θ2 )
4πR
(5.20)
Forze tra correnti
Si può applicare la formula (5.19) combinata con l’Eq.(5.9) per calcolare l’interazione
fra due correnti elettriche. Consideriamo per semplicità due correnti parallele I e I 0
nello stesso verso separate da una distanza R (vedi Fig.5.9).
Figura 5.9: Campo magnetico prodotto da una corrente rettilinea e linee di campo
corrispondenti
La forza F~ 0 su I 0 prodotta da I sarà
F~ 0 = I 0
Z
~ 0.
~u0T × Bdl
~ = −~uR B, usando l’Eq.(5.19) per B, abbiamo
Dato che ~u0T × B
Z
µ0 I 0
µ0 II 0 0
0
0
~
F =I
~uR
dl = −~uR
L .
2πR
2πR
(5.21)
(5.22)
Questo risultato indica che la corrente I attira I 0 . Lo stesso risultato si ottiene
per la forza su I prodotta da I 0 . Quindi due correnti parallele nello stesso verso si
attraggono con la stessa forza. Si può facilmente verificare che se le correnti hanno
verso opposto, esse si respingono. Questo risultato può essere esteso a correnti di
qualsiasi configurazione.
La forza agente tra fili conduttori paralleli percorsi da corrente è usata per definire
l’Ampère nella maniera seguente: se due fili paralleli di lunghezza indefinita, posti alla
distanza di 1 m e percorsi dalla stessa corrente, interagiscono con una forza per unita
di lunghezza di 2 × 10−7 N/m, allora la corrente che li attraversa e, per definizione, di
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
5.8. APPLICAZIONI DELLA LEGGE DI BIOT-SAVART
99
1 A. Di fatto, tale definizione, fissa il valore della permeabilita magnetica del vuoto µ0 ,
che vale cosi 4 × 10−7 (T × m)/A.
5.8.3
Campo magnetico di una corrente circolare
Consideriamo una spira circolare di raggio a percorsa da una corrente I. Stabiliamo l’intensità del campo elettrico in
corrispondenza del punto P posto sull’asse Z della spira a una distanza R.
Il contributo al campo magnetico da
parte di un elemento dl di corrente è
dato dalla relazione (5.15). Il campo
~ prodotto in P dall’ elemento dl ha
dB
modulo
Figura 5.10: Campo magnetico sull’asse di
una corrente circolare
µ0 Idl
,
(5.23)
4π r2
ed è perpendicolare al piano P AA0 definito da ~ur e ~ur ; quando si considerano i contributi
dB di tutti gli elementi dl che formano la spira, si osserva che le componenti parallele
all’asse Z si sommano, mentre quelle perpendicolari si elidono a due a due, per la
simmetria del problema.
Nei punti dell’asse della spira il campo magnetico è dunque parallelo all’asse stesso
e concorde a questo se l’orientazione corrisponde a quella della corrente secondo la
regola della mano destra. Il contributo al campo da parte della componente diretta
lungo l’asse Z è:
dB =
µ0 Idl
cos α ,
4π r2
dove cos α = a/r. Integrando lungo tutta la spira, si ha:
dBZ = dB cos α =
I
µ0 Ia
dBZ =
4πr3
dB =
I
dl =
µ0 Ia2
,
2r3
(5.24)
(5.25)
Infine poiché r2 = a2 + R2 , si ha:
B=
µ0 Ia2
2(a2 + R2 )3/2
(5.26)
Al centro della spira, per Z pari a 0, il campo assume la massima intensità Bmax e
risulta:
Bmax =
SUPSI-DTI
µ0 I
2a
Corso di Fisica e Modellistica
(5.27)
Prof. Andrea Danani
5.8. APPLICAZIONI DELLA LEGGE DI BIOT-SAVART
SUPSI-DTI
Corso di Fisica e Modellistica
100
Prof. Andrea Danani
Capitolo 6
Induzione elettromagnetica
6.1
Introduzione
La generazione di forze elettromotrici e quindi di correnti in circuiti da parte di campi
magnetici variabili può essere verificata attraverso dei semplici esperimenti. Avvicinando un magnete ad una spira connessa ad un galvanometro è possibile rilevare la
deviazione dell’ago dello strumento, mentre, allontanando il magnete, si osserva la deviazione dell’ago nella direzione opposta. La stessa fenomenologia può essere osservata
quando il magnete è fermo mentre è la spira ad essere posta in moto. Invece, in assenza
di moto relativo del magnete rispetto alla spira non si nota alcuna deviazione dell’ago
del galvanometro. Inoltre, più l’avvicinamento è veloce e più la corrente è intensa, e
un’inversione dei poli del magnete porta all’inversione del senso della corrente. Questi
Figura 6.1: Primo esperimento di Faraday
risultati portano a concludere che è possibile generare una corrente in un circuito, detta
corrente indotta, in assenza di una batteria. In tale circostanza si dirà che la corrente
nel circuito in tali condizioni è prodotta da una forza elettromotrice indotta.
101
102
6.2. LA LEGGE DI FARADAY-HENRY
6.2
La legge di Faraday-Henry
Attorno al 1830, Michael Faraday e Joseph Henry intuirono dai risultati sperimentali
citati che l’induzione di una corrente in un circuito avviene per effetto di un campo
magnetico variabile.
Abbiamo visto che il flusso di una corrente tra due punti in un circuito è determinato
dalla presenza di una differenza di potenziale non nulla tra questi punti. Indicando con
A e B tali punti, la differenza di potenziale si esprime come:
Z B
~ · d~l
E
VA − VB =
A
Se si fa riferimento ad un percorso chiuso C, come per una spira, si ha che:
I
~ · d~l
VE = E
C
Nel caso elettrostatico, il campo elettrico è conservativo, per cui VE è nullo; affinché
scorra una corrente in un circuito è necessaria quindi la presenza di un campo di natura
non elettrostatica, come quello prodotto, ad esempio, da una batteria; tale campo è
denominato campo elettromotore. Faraday verificò che questa forza elettromotrice è
proporzionale alla rapidità di variazione nel tempo del flusso del campo magnetico
attraverso la superficie sottesa dal circuito in esame.
L’intensità della forza elettromotrice indotta VL in un circuito di superficie S, per
~ è data dalla seguente legge di Faraday-Henry:
effetto del campo magnetico B
VL = −
dΦB
dt
(6.1)
La variazione del flusso si può ottenere in differenti modi:
a) con la variazione della campo magnetico che attraversa il circuito;
b) per una modifica della superficie attraverso la quale si calcola il flusso;
c) con una variazione dell’angolo compreso tra la direzione del campo magnetico e la
direzione normale alla superficie considerata.
6.3
La legge di Lenz
La polarità della forza elettromotrice indotta può essere stabilita a partire dalla corretta applicazione della convenzione relativa all’orientamento della superficie attraverso
la quale si determina il flusso, rispetto al verso di percorrenza del contorno di tale
superficie. Tuttavia questa polarità si può ricavare su basi prettamente fenomenologiche, dalla applicazione della legge di Lenz, la quale afferma che la polarità della forza
elettromotrice indotta in un circuito e tale da produrre una corrente che genera una
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
6.4. INDUZIONE DI MOVIMENTO
103
campo magnetico B~1 che si oppone alla variazione del flusso attraverso il circuito. In
altri termini, la corrente indotta tende a mantenere costante l’originario valore del
campo magnetico.
~ e per effetto della
Nella figura (6.2), il circuito è immerso in un campo magnetico B
~ attraverso il circuito, questo sarà sede di una forza elettromovariazione del flusso di B
trice. La legge di Lenz afferma che tale forza elettromotrice determinerà una corrente
~ tale da opche percorrerà il circuito, in maniera da generare un campo magnetico B
~ e nella figura, sono illustrati i quattro casi
porsi all’aumento dell’intensità del campo B
possibili . Esiste una giustificazione di carattere energetico a tale fenomeno; supponiamo, per assurdo, che la forza elettromotrice indotta sia tale da produrre una corrente
il cui verso determina un campo magnetico che si somma col campo originale anziché
~ corrisponderebbe un ulteriore aumensottrarsi. In questo caso, ad un aumento di B
to del campo magnetico totale, col conseguente aumento dell’intensità della corrente
indotta. Ciò innescherebbe un processo che determinerebbe la crescita indefinita della
corrente in seno al circuito; d’altra parte, poiché al passaggio di corrente è associata
una dissipazione di energia, vuol dire che in tale circostanza si avrebbe la generazione
progressiva di energia a spese di un campo magnetico iniziale di intensità finita. Ciò è
un palese assurdo derivante dalla scorretta scelta del verso della corrente indotta.
Figura 6.2: Campo magnetico Bi creato dalla corrente indotta per flussi crescenti (a, c)
e decrescenti (b, d)
6.4
Induzione di movimento
~ La variazione del
Consideriamo un circuito C immerso in un campo magnetico B.
flusso del campo magnetico concatenato col circuito può ottenersi in varie maniere che
~ varia perché B
~ varia nel tempo
di solito possono ricondursi a due casi: il flusso di B
~ varia siccome cambia col tempo
mentre il circuito C resta fermo; oppure il flusso di B
la configurazione del circuito C in un campo magnetico stazionario. Questo secondo
caso è detto induzione di movimento. Consideriamo a questo proposito due semplici
casi.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
104
6.4. INDUZIONE DI MOVIMENTO
Consideriamo dei conduttori disposti come in Fig.(6.3), ove il conduttore P Q può
muoversi parallelamente con velocità v mantenendosi in contatto con i conduttori RT
e SU . Il sistema P QRS forma un circuito chiuso. Supponiamo ora che che esista un
campo magnetico uniforme B perpendicolare al piano del conduttore.
Figura 6.3: Fem introdotta in un conduttore in moto con B uniforme
~
Ciascuna carica q nel conduttore P Q in moto è soggetta alla forza di Lorentz q~v × B
agente lungo QP . Questa si può supporre dovuta a un campo elettrico equivalente dato
da
~ eq = ~v × B
~
E
Se P Q = l, esiste una differenza di potenziale tra P e Q data da VE = Eeq l = Bvl,
~ sono perpendicolari.
dato che ~v e B
D’altra parte, se indichiamo con x la lunghezza del tratto SP , l’area del circuito
P QRS è pari a lx e il flusso del campo magnetico diventa
φB = Blx
per cui tenendo conto del fatto che dx/dt = v, si ottiene:
VL = −
d
dx
dΦB
= − (Blx) = −Bl
= −Blv
dt
dt
dt
che corrisponde al risultato ottenuto in precedenza.
Come secondo esempio, consideriamo un circuito rettangolare ruotante con frequen~ Quando la normale ~n al
za angolare ω immerso in un campo magnetico uniforme B.
circuito è inclinata di un angolo ϑ = ωt rispetto al campo magnetico, tutti i punti di
~ eq = ~v × B
~ è riP Q si muovono con velocità ~v tale che il campo elettrico equivalente E
volto da Q a P e ha modulo Eeq = vB sin ϑ. Ragionamento analogo vale per il lato RS,
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
105
6.5. L’AUTOINDUZIONE
Figura 6.4: Spira rotante in un campo magnetico
mentre non vi è differenza di potenziale sui lati QR e SP . Ponendo che P Q = RS = l,
si ottiene
I
Eeq dl = 2lvB sin ϑ
VL =
L
Dato che v = ω(x/2) e che lx = S è l’area del circuito, si ottiene finalmente
VL = 2lvB sin ϑ = 2l(ωx/2)B sin ωt = ωSB sin ωt
D’altra parte, il flusso magnetico attraverso il circuito è dato da:
~ · ~nS = BS cos ϑ = BS cos ωt
φB = B
Perciò, si ottiene che
VL = −
6.5
dΦB
d
= −SB (cos ωt) = ωSB sin ωt
dt
dt
L’autoinduzione
Per avere una forza elettromotrice indotta in un circuito, non è strettamente necessario che questo risulti immerso in un campo magnetico esterno variabile; infatti, se il
circuito è percorso da una corrente variabile, tale corrente produrrà un campo magnetico variabile che si concatenerà con lo stesso circuito determinando un flusso variabile;
questa variazione provocherà di conseguenza la generazione di una forza elettromotrice
che, in tale circostanza, è detta autoindotta. Per tale motivo il fenomeno descritto
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
106
6.6. CIRCUITI RL
prende il nome di autoinduzione. Sperimentalmente si verifica che la corrente I che attraversa il circuito è legata al flusso φI (B) del campo magnetico prodotto dalla corrente
I attraverso il circuito considerato, dalla relazione:
φI (B) = LI
(6.2)
Il coefficiente L dipende dalla forma del conduttore ed è chiamato autoinduttanza del
circuito. L’unità di misura dell’autoinduttanza è denominata henry (H) e si ha che
[H] = T m2 /A.
Combinando le equazioni (6.1) e (6.2), abbiamo per la fem autoindotta,
VL = −
dI
dΦI
= −L
,
dt
dt
(6.3)
supponendo che la forma del circuito rimanga invariata. Quindi VL agisce sempre in
modo da opporsi al cambiamento della corrente. L’effetto di un’induttanza in seno ad
un circuito è quello di impedire alla corrente di aumentare o decrescere istantaneamente.
Tipicamente è possibile assumere che in un circuito l’induttanza sia concentrata in
particolari dispositivi, come le bobine, detti induttori.
6.6
Circuiti RL
Abbiamo visto che se si introduce improvvisamente una fem VE in un circuito RC, la
carica tende esponenzialmente al suo valore finale di equilibrio CVE con una costante
di tempo capacitiva τC = RC. Se si rimuove la fem, la carica si annulla sempre in
modo esponenziale secondo la legge Q = Q0 e−t/τC . Una crescita (o diminuzione) simile
di corrente avviene in un circuito RL costituito cioè da una sola maglia contenente una
resistenza R e un’induttanza L.
Figura 6.5: a) circuito LR b) legge di Lenz
Con riferimento alla figura (6.5), la bobina L impedisce che alla chiusura dell’inter–
ruttore nella posizione 1, la corrente diventi istantaneamente uguale a VE /R. Infatti,
al crescere della corrente nel tempo, aumenta anche il flusso magnetico concatenato col
circuito e, in particolare, con la bobina. Tale aumento induce ai capi della bobina una
forza elettromotrice che per la legge di Lenz, si oppone alla variazione di flusso. La
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
107
6.7. ENERGIA IMMAGAZZINATA IN UNA BOBINA
forza elettromotrice deve determinare, quindi, una corrente opposta a quella originaria
che rallenterà l’aumento complessivo della corrente. In pratica la bobina agisce in seno
al circuito come un generatore di forza elettromotrice con polarità opposta rispetto alla
batteria che alimenta il circuito. La legge di Ohm diventa quindi:
RI = VE + VL
ossia RI = VE − L
dI
,
dt
(6.4)
che corrisponde all’equazione differenziale lineare:
dI R
VE
+ I=
.
dt
L
L
(6.5)
La soluzione dell’equazione (6.5), con la condizione iniziale I(0) = 0 è data da:
I(t) =
VE
(1 − e−t/τL )
R
con τL =
L
.
R
(6.6)
Se si stacca la batteria del circuito (interruttore su posizione 2), l’equazione differenziale
che regola la diminuzione della corrente si ottiene ponendo VE = 0 in (6.5), per cui:
dI R
+ I=0.
dt
L
(6.7)
La soluzione con la condizione iniziale I(0) = I0 = VE /R è:
VE −t/τL
I(t) =
= I0 e−t/τL
(6.8)
e
Quindi più elevata è la resistenza R o piccola è l’induttanza L, più rapida è la decrescita
della corrente.
6.7
Energia immagazzinata in una bobina
Moltiplicando per I l’equazione (6.4), si ottiene
dI
.
(6.9)
dt
Questa espressione rappresenta il bilancio energetico del circuito. Il primo membro è
la potenza spesa dal generatore per mantenere la corrente I nel circuito; il secondo
membro è somma di due termini: il primo è la potenza dissipata nella resistenza R per
effetto Joule, mentre il secondo indica la rapidità con cui viene immagazzinata l’energia
nella bobina L. In particolare, indicando con UL l’energia immagazzinata, in un certo
istante nella bobina, allora:
dUL
dI
= LI
.
(6.10)
dt
dt
Per ricavare l’energia magnetica necessaria per incrementare la corrente da zero a I, si
integrano ambo i membri dell’espressione dUm = LIdI e si ottiene:
Z UL
Z I
1
UL =
dUL =
LIdI = LI 2
(6.11)
2
0
0
VE I = RI 2 + LI
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
6.8. OSCILLAZIONI ELETTRICHE: CIRCUITI RCL
108
Si può notare l’analogia di questa relazione con l’espressione dell’energia UC immagazzinata in un condensatore C caricato con una carica Q, vale a dire:
UC =
6.8
Q2
2C
(6.12)
Oscillazioni elettriche: circuiti RCL
Esistono quindi tre parametri che caratterizzano il flusso di elettricità in un circuito
elettrico: la capacità C, la resistenza R e l’autoinduttanza L.
Figura 6.6: Circuiti RCL senza e con fem esterna
Analizziamo il caso in cui agiscano solo le fem VL e VC . Applicando la legge di
Ohm, abbiamo:
dI
Q
RI = VL + VC = −L −
.
(6.13)
dt
C
Derivando rispetto a t e riordinando i termini, si ottiene:
L
d2 I
dI
1
+R + I =0 .
dt
dt C
(6.14)
La soluzione di questa equazione differenziale è data da:
I(t) = I0 e−γt sin(ωt + α)
(6.15)
con
γ = R/2L ,
ω=
p
1/LC − R2 /4L2 .
(6.16)
Si stabilisce quindi una corrente oscillante la cui ampiezza diminuisce con il tempo. Se il
rapporto R/L è molto piccolo, possiamo trascurare sia γ che il secondo terminepsotto la
radice di ω, ottenendo oscillazioni elettriche non smorzate con pulsazione ω = 1/LC,
che è la pulsazione caratteristica di un circuito LC. Si noti che lo morzamento in un
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
6.9. CIRCUITI ACCOPPIATI: MUTUA INDUZIONE
109
circuito elettrico è dovuto alla dissipazione di energia nella resistenza. Se la resistenza
R è sufficientemente grande, in modo che R2 > 4L/C, ω diventa immaginaria e la
corrente diminuisce gradualmente senza oscillare.
Le oscillazioni nelle quali non è applicata alcuna fem esterna sono chiamate oscillazioni libere del circuito. Se si aggiunge una fem esterna, si parla di oscillazioni
forzate.
6.9
Circuiti accoppiati: mutua induzione
L’induzione di una forza elettromotrice in seno ad un circuito può avvenire a causa del
passaggio di una corrente variabile nel circuito stesso, ma può anche prodursi in corrispondenza delle variazioni di corrente in circuiti posti nelle vicinanze. Tale fenomeno
prende il nome di mutua induzione.
Figura 6.7: La mutua induzione
Consideriamo due spire prossime una all’altra (vedi figura 6.7); supponiamo che
una delle due sia percorsa da una corrente I1 . Tale corrente produrrà nell’intorno della
spira un campo magnetico B~1 che concatenandosi con la seconda spira, determinerà
un flusso φ2 non nullo. Sperimentalmente si verifica che tale flusso è proporzionale alla
corrente I1 che ha prodotto il campo:
φ2 = M21 I1 .
(6.17)
Analogamente, se è la seconda spira ad essere percorsa da una corrente I2 , il flusso del
campo B~2 prodotto, attraverso la prima spira sarà pari a:
φ1 = M12 I2 .
(6.18)
E’ possibile provare che i due coefficienti di proporzionalità M12 e M21 sono uguali;
poniamo quindi M = M12 = M21 . Il termine M prende il nome di coefficiente di
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
6.9. CIRCUITI ACCOPPIATI: MUTUA INDUZIONE
110
mutua induttanza e dipende dalla forma dei circuiti e dal loro mutuo orientamento.
Anche M è misurato in henry.
Noto M è possibile, quindi, stabilire l’entità della forza elettromotrice indotta in
un circuito per effetto della variazione della corrente in un altro. Se la corrente I1 è
variabile, il flusso φ2 attraverso il circuito 2 cambia e nel circuito viene indotta una fem
VM 2 data da:
dI1
VM 2 = −M
.
(6.19)
dt
Naturalmente esisterà un’analoga espressione per la forza elettromotrice VM 1 indotta
nel primo circuito quando il secondo è percorso da una corrente I2 variabile, vale a
dire:
dI2
VM 1 = −M
.
(6.20)
dt
Come influenza l’effetto mutuo fra due circuiti l’andamento della corrente nei circuiti
stessi? Riscriviamo l’equazione (6.14) per i due circuiti, aggiungendo le fem indotte
VM 1 e VM 2 : Per il circuito 1, si ha:
L1
dI1
1
d2 I2
d2 I1
+R
+ I1 = −M 2 .
dt
dt
C
dt
(6.21)
Per il circuito 2, analogamente:
L2
d2 I2
dI2
1
d2 I1
+R
+ I2 = −M 2 .
dt
dt
C
dt
(6.22)
Le due equazioni precedenti costituiscono un insieme di equazioni differenziali accoppiate. Senza esplicitare la soluzione, si può affermare che si verifica uno scambio di
energia tra i circuiti. Applicazioni pratiche di questo processo sono i trasformatori e i
generatori ad induzione. L’aspetto più importante e fondamentale della mutua induzione è quindi il fatto che l’energia può essere scambiata tra due circuiti mediante il
campo elettromagnetico, il quale agisce come un veicolo per il trasferimento dell’energia
nello spazio.
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
Capitolo 7
Problemi
Serie 1: Ottica geometrica
Serie 2: Onde
Serie 3: Densità
Serie 4: Campi elettrici
Serie 5: Campi magnetici e induzione
111
112
SERIE 1: OTTICA GEOMETRICA
1. Quanto deve essere alto uno specchio verticale affinché una persona alta 1.80
possa vedere riflessa la sua immagine completa?
[la metà ]
2. Un raggio di luce che si propaga in aria entra in acqua con un angolo di incidenza
di 45o . Se l’indice di rifrazione dell’acqua è n = 1.33, quanto vale l’angolo di
rifrazione?
[32o ]
3. Un vetro ha l’indice di rifrazione pari a n = 1.50. Quanto vale l’angolo limite per
la riflessione totale della luce che esce dal vetro ed entra in aria, dove n = 1.0?
[42o ]
4. Un oggetto alto 1.5 cm si trova a 20 cm davanti a uno specchio concavo avente
raggio di curvatura pari a 30 cm. Determinare la posizione dell’immagine e le
sue dimensioni. Costruisci graficamente l’immagine. [q = 60 cm; h0 = −4.5 cm,
immagine reale capovolta davanti allo specchio]
5. Un oggetto alto 1 cm si trova a 10 cm da uno specchio concavo che ha il raggio
di curvatura di 30 cm. Si localizzi l’immagine e si determini l’ingrandimento.
Costruisci graficamente l’immagine.
[q = −30 cm; G = 3, immagine virtuale
diritta dietro lo specchio]
6. Uno specchietto retrovisore convesso ha raggio di curvatura R = 40 cm. Si
localizzi l’immagine e si determini l’ingrandimento di un oggetto distante 10 m.
[q = −19.6 cm; G = 1/51 cm, immagine virtuale dietro lo specchio]
7. L’altezza dell’immagine reale di un oggetto formata da un lente convergente è il
doppio di quella dell’oggetto. Se l’immagine dell’oggetto si trova a 20 cm dalla
lente, calcola la distanza dell’oggetto e la distanza focale della lente
[p = 10
cm,f = 6.67 cm]
8. Un oggetto si trova a una distanza di 30 cm da una lente convergente di lunghezza
focale pari a 40 cm. Calcola la distanza dell’immagine dell’oggetto dalla lente
[q = −120 cm]
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
113
9. Un segmento luminoso lungo 1 cm è posto dinanzi a una lente convergente perpendicolarmente all’asse ottico della lente, a una distanza di 30 cm dal suo centro
ottico. L’immagine virtuale è alta 10 cm.
Qual è la lunghezza focale della lente?
[f = 33.3 cm]
10. Devi produrre su uno schermo l’immagine ingrandita due volte di un oggetto
luminoso che si trova a 90 cm dallo schermo. Di che lente hai bisogno (tipo e
distanza focale)?
[convergente,f = 20 cm]
11. Un oggetto è posto davanti a una lente divergente a una distanza di 30 cm. La
sua immagine è virtuale e si forma a una distanza di 18 cm dalla lente. Calcola
la lunghezza focale della lente.
[f = −45 cm]
12. Una lente biconvessa sottile realizzata con vetro di indice di rifrazione n = 1.5 ha
raggi di curvatura (in valore assoluto) di 10 cm (a destra) e 15 cm (a sinistra).
a) Se ne trovi la distanza focale.
[f = 12 cm]
b) Verifica che essa non cambia se si inverte la direzione della luce incidente
13. Un’ape si posa davanti a uno specchio sferico con | f |= 40 cm. L’immagine
prodotta dallo specchio ha lo stesso orientamento dell’ape e la sua altezza si
riduce di un fattore 5.
a) L’immagine è reale o virtuale? Si trova dalla stessa parte dell’ape o dalla
parte opposta?
b) Lo specchio è concavo o convesso? Qual è la sua distanza focale corredata di
segno?
14. Un pesce si trova in un recipiente sferico di vetro pieno di acqua, con in dice di
rifrazione n = 1.33. Il raggio del recipiente è di 15 cm. Il pesce guarda attraverso
il recipiente e vede un gatto sul naso a 10 cm dal recipiente.
a) Dove è l’immagine del naso del gatto?[q = −17.1 cm, virtuale davanti]
b) Risulta ingrandito o rimpicciolito?
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
114
15. Una lente biconcava ha indice di rifrazione pari a 1.5. I raggi di curvatura hanno
i valori assoluti di 10 cm e 15 cm. Trovare la distanza focale.
[f = −12 cm]
16. Una formica si trova lungo l’asse ottico di una lente sottile a facce simmetriche, a
20 cm dalla lente. L’ingrandimento trasversale della formica prodotto dalla lente
è G = −1/4, e l’indice di rifrazione della lente è 1.65. Si determini il tipo di
immagine prodotta, il tipo di lente e il raggio di curvatura della lente. [R = 5.2
cm]
17. Un oggetto si trova davanti a due lenti coassiali sottili con distanza focale f1 =
+24 cm e f2 = +9 cm che sono separate di 10 cm. L’oggetto si trova a 6.0 cm
dalla lente 1. Dove si trova la sua immagine finale?
[q2 = 18 cm]
18. Il rifrattometro è uno strumento per la determinazione dell’indice di rifrazione
delle sostanze. Il principio di funzionamento è basato sulla misura dell’angolo
limite.
Nel rifrattometro di Pulfrich un fascio di luce convergente colpisce la superficie
di separazione tra un campione di indice di rifrazione incognito n e un prisma
di indice di rifrazione noto n0 (con n0 > n) per poi riemergere dall’altro lato
del prisma, come indicato in figura. Determinare l’indice di rifrazione incognito.
[n = 1.4]
Dati: n0 = 1.5; naria = 1.0; Ê = 30o
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
115
SERIE 2: ONDE
1. Un’onda armonica si sta propagando su una fune costituita da tratti in densità
lineare µ1 e µ2 , rispettivamente. La lunghezza d’onda nel tratto λ = 1 m e nel
√
tratto 2 vale 2 m. Quale delle seguenti relazioni è corretta?
A µ1 = µ2
√
2µ2
√
C µ2 = 2µ1
B µ1 =
D µ1 = 2µ2
E µ2 = 2µ1
2. Costruisci la scala diatonica di Mi maggiore (E major) determinando le frequenze
delle note che compongono la scala, usando come riferimento il La4 a 440 Hz.
3. Una corda di violino è tesa con la forza F = 100 N. La sua densità lineare vale
µ = 20 g/m. Determinare:
a) la velocità di propagazione delle onde nella corda;
b) la corrispondente lunghezza d’onda sapendo che esse hanno la frequenza di
500 Hz.
[v = 70.7 m/s, λ = 0.14 m]
4. Una lunga corda orizzontale viene messa in oscillazione dall’azione prodotta ad
un suo estremo da una sbarretta oscillante trasversalmente con frequenza ν = 2
Hertz ed ampiezza 5 cm. La fune ha una densità lineare µ = 0.1kg/m ed ha una
tensione T = 10N . Calcolare:
a) velocità e lunghezza d’onda del moto ondulatorio
[10 cm/s, 5 m]
b) Scrivere anche l’equazione dell’onda supponendo che si muova da sinistra
verso destra e che, in t = 0, l’estremità che si trova in x = 0 si trovi nella
posizione di equilibrio y = 0.
5. In un esperimento su onde stazionarie, una corda lunga 90 cm è attaccata al
dente di un diapason che oscilla perpendicolarmente alla lunghezza della corda
a una frequenza di 60 Hz. A quale tensione deve essere sottoposta la corda (ad
esempio con dei pesi all’altra estremità ) se essa vibra con 5 nodi (comprese le
estremità , vale a dire 4 occhielli)
[35.7 N ]
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
116
6. a) Trova la velocità delle onde su una corda di violino di 800 mg lunga 22 cm
se la frequenza fondamentale è di 920 Hz.
b) Quanto è la tensione della corda?
c) Per l’onda fondamentale, qual è la lunghezza d’onda delle onde sulla corda e
delle onde sonore emesse dalla corda?
[405 m/s; 596 N, 0.44 m, 0.373 m]
7. Una fune di densità lineare µ = 100 g/m lunga 100 metri pende da un chiodo di
una parete rocciosa. Il suo estremo libero viene fatto oscillare con moto armonico
a frequenza costante f = 2 Hz. Determinare la velocità di propagazione delle onde
a 90 m e a 10 m dal chiodo e la lunghezza d’onda in prossimità di quelle quote.
[v(90) = 9.9 m/s, λ(90) = 4.95 m, v(10) = 29.7 m/s, λ(10) = 14.85 m]
8. In una sala di registrazione, un microfono è sospeso per il filo a un supporto e
pende in posizione verticale davanti a un flautista. Questi esegue un La (440Hz),
stando fermo davanti al microfono. Allorché si ascolta la registrazione, si nota che
la frequenza varia con un periodo di 1,2 s, aumentando e diminuendo di altezza
fino a un massimo di 0,85 Hz in più e in meno. Con quale ampiezza il microfono
oscillava avanti e indietro verso il flautista? (Assumi il valore di 344 m/s per la
velocità del suono.)
9. Vuoi misurare con un apparecchio la frequenza di un suono emesso da un ambulanza. Se l’ambulanza si avvicina a te a 72 km/h, la frequenza misurata è di 700
Hz mentre se tu ti avvicini all’ambulanza ferma a 18 km/h, la frequenza misurata
è di 668.6 Hz
a) Qual è la velocità del suono e quale frequenza propria possiede il suono emesso
dall’ambulanza?
b) A che nota nella scala ben temperata corrisponde la frequenza propria emessa,
fissando il La4 a 440 Hz?
10. Un’onda trasversale con un’ampiezza di 40 cm, si propaga a una velocità di 5
m/s e possiede una lunghezza d’onda di 2 metri. Per x = 0 e t = 0, l’ampiezza è
nulla.
a) Quanto vale il periodo?
b) Che ampiezza possiede nel punto x = 7.6 m all’istante t = 1.45 sec?
c) Che velocità verticale possiede il punto x = 5.2 nell’istante t = 3.1 sec?
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
117
SERIE 3: DENSITA’
1. Di una sbarra lunga due metri, è nota la densità ρ(x) = sin xe−x , 0 ≤ x ≤ 2
a) Trova la massa della sbarra
b) Quanta percentuale di massa è contenuta tra 80 e 120 cm?
2. Tre cariche puntiformi di +2, +3 e +4µC sono poste rispettivamente sui vertici
A, B e C di un triangolo equilatero (con base AB) di 10 cm di lato. Calcola la
forza risultante che agisce sulla carica di 4 µC posta in C.
[R: 15.69 N, in direzione N 6.59o O]
3. Una piccola sfera di massa 0, 2 g è appesa ad un filo tra due piastre verticali
distanti 5 cm. La carica della sfera è di 6 · 10−9 C e il filo si dispone in modo da
formare un angolo di 10o con la verticale. Qual è la densità di carica superficiale
delle piastre e la loro differenza di potenziale?
[R: σ = 5 · 10−7 C/m2 ; ∆V = 2882 V]
4. Visto in modo più quantistico, un elettrone dell’atomo di idrogeno può ritenersi
distribuito in tutto lo spazio con una densità di carica pari a ρ(r) = C e−2r/r0
(r0 = 5.3 · 10−11 m come nell’esercizio 1).
a) Trova la costante C in modo che la carica totale nello spazio sia effettivamente
−e.
[R: C = −e/πr03 ]
b) Calcola il campo elettrico in funzione di r.
[R: E(r) = e/(4πε0 r2 )[(2(r/r0 )2 + 2(r/r0) + 1)e−2r/r0 − 1]]
5. Un filo di lunghezza L ha una densità lineare di carica λ ed è posto sull’asse x
fra l’origine e il punto (0, L). Partendo dal potenziale elettrico, dimostra che il
campo elettrico creato dal filo in un punto P (x, y) del piano è dato da:
λ
(sin θ2 − sin θ1 )
4πε0 y
λ
=
(cos θ2 + cos θ1 )
4πε0 y
Ex = −
Ey
dove θ1 = ∠(P OL) and θ2 = ∠(P LO).
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
118
SERIE 4: CAMPI ELETTRICI
1. Abbiamo visto che le linee di forza di un campo elettrico non possono mai
intersecarsi. Spiega perché.
2. L’atomo di idrogeno consiste in un nucleo formato da un protone e un elettrone
orbitale (q = ±1.6 · 10−19 C). Se si assume che l’orbita dell’elettrone sia circolare
e che la distanza fra le due particelle sia pari a 5.3 · 10−11 m, trovare
a) la forza elettrica attrattiva fra le e particelle
b) la velocità orbitale dell’elettrone attorno al protone (me = 9.11 · 10−31 kg)
[R: 8.2 · 10−8 N; 2.2 · 106 m/s]
3. Tre cariche puntiformi di +2, +3 e +4µC sono poste rispettivamente sui vertici
A, B e C di un triangolo equilatero (con base AB) di 10 cm di lato. Calcola la
forza risultante che agisce sulla carica di 4 µC posta in C.
[R: 15.69 N, in direzione N 6.59o O]
4. Trovare nel punto P (0, 0, 5)m il campo elettrico dovuto a Q1 = 0.35µC posta in
~ =
P1 (0, 4, 0)m e a Q2 = −0.55µC posta in P2 (3, 0, 0)m.
[E
(74.9; −48.0; −64.9)N/C]
5. Un filo lungo 10 metri è posto lungo l’asse z e possiede una densità lineare ρ =
2 · 10−8 C/m. Trovare il campo elettrico in un punto a due metri dal filo posto
su un piano perpendicolare al filo passante per il punto medio. [E = 167N/C in
direzione radiale]
6. Una bacchetta piegata ad arco che sottende un arco di 120o con raggio R = 65
cm possiede una carica Q = 4 · 10−2 µC distribuita uniformemente.
a) Calcolare il campo elettrico nel centro del cerchio a cui appartiene l’arco.
[E = 703.7 N/C]
b) Quale carica deve possedere una carica puntiforme posta alla distanza R
dal centro opposta al centro dell’arco, per fornire lo stesso campo elettrico?
[−3.31 · 10−2 µC]
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
119
7. Un filo lungo 4 metri con carica Q = 8µC è posto sull’asse delle ascisse fra x = −2
e x = 2. La densità di carica lineare è data
λ(x) = C | x | ,
−2 ≤ x ≤ 2
[R: C = 2 µC/m2 ]
Calcola la costante C. Che unità di misura ha?
8. Trovare il lavoro compiuto spostando una carica puntiforme Q = −20µC dall’origine al punto (4, 0) m e in seguito al punto (4, 2) m., se il campo elettrico
presente è dato da:
~ = ( x + 2y)~ex + 2x~ey
E
2
[ L= 80µJ e 320µJ]
9. Una carica puntiforme Q1 = +6e viene tenuta fissa nell’origine degli assi cartesiani. Una seconda carica Q2 = −10e viene fissata in x0 = 9.0nm e y = 0. Il
luogo di punti nel piano xy in cui V = 0 è una circonferenza centrata sull’asse x.
a) Trova la posizione xc del centro della circonferenza
[ xc = −5.06 nm]
b) Trova il raggio R della circonferenza
[ R=8.44 nm]
10. E’ dato il potenziale elettrico
V (x, y, z) = πx2 sin(z)/y
Trova il campo elettrico nel punto P (2, −2, π/6).
~ = (π, π/2,
[E
p
(3)π) N/C]
11. Una carica di 30 nC è uniformemente distribuita su un disco circolare di raggio
R = 2 m. Trovare il potenziale in un punto sull’asse del disco che si trova a 5
metri d’altezza rispetto al centro.
[ V=52 V]
12. Trova il campo elettrico prodotto da una sfera di raggio R con una carica Q
distribuita uniformemente in tutto il volume
a) all’esterno della sfera (r ≥ R)
b) all’interno della sfera per r < R
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
120
13. Un guscio sferico isolante di raggio interno a ed esterno b ha una densità di carica
volumetrica pari a ρ = K/r, dove K è una costante e r è la distanza dal centro
della sfera che definisce il guscio.
a) Usando il teorema di Gauss, trova il campo elettrico nelle tre zone r < a, a ≤
r ≤ b, r > b
b) Al centro del guscio, è posta una carica puntiforme q. Quale dovrebbe essere
il valore di K affinché il campo elettrico nel guscio (a ≤ r ≤ b) sia costante?
[ K = q/2πa2 ]
c) Quanto vale il campo elettrico in quel caso?
[ E = −q/4πε0 a2 ]
14. Visto in modo più quantistico, un elettrone dell’atomo di idrogeno può ritenersi
distribuito in tutto lo spazio con una densità di carica pari a ρ(r) = C e−2r/r0
(r0 = 5.3 · 10−11 m come nell’esercizio 2).
a) Trova la costante C in modo che la carica totale nello spazio sia effettivamente
−e.
[R: C = −e/πr03 ]
b) Calcola il campo elettrico in funzione di r.
[R: E(r) = e/(4πε0 r2 ) (2(r/r0 )2 + 2(r/r0 ) + 1)e−2r/r0 − 1 ]
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
121
SERIE 5: CAMPI MAGNETICI E INDUZIONE
1. La figura mostra uno spettrometro di massa per misurare la massa di ioni. Supponendo che in un esperimento, abbiamo B =
80 mT , V = 1000 V e la carica degli ioni è
di −e. Si constata che x = 1.625 m. Qual
è la massa dei singoli ioni in unità di massa
atomica (1u = 1.66 · 10−27 )
[ m = 203.9 u]
2. Nella figura a fianco, sia l = 1.5 m, B = 0.5 T e
v = 4 m/s.
a) Qual è la differenza di potenziale tra i capi del
conduttore?
[R: 3V]
b) Quale terminale è a potenziale più alto?[R:(a)]
3. Il campo magnetico B in tutti i punti interni alla
circonferenza tratteggiata in figura è uguale a 0.5
T e decresce alla velocità di 0.1 T/s.
a) Qual è la forma delle linee di forza del campo
elettrico indotto?
[R: cerchio orientati in
direzione oraria]
b) Qual è il valore di questo campo e la fem. nell’anello?
[R:
−3
−3
5 · 10 , π · 10 ]
4. Un disco metallico di raggio R ruota con velocità angolare ω in presenza di un
campo magnetico uniforme B parallelo all’asse di rotazione. Trova la differenza
di potenziale tra il centro e il bordo del disco.
[R: ωR2 B/2]
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani
122
5. Una spira rettangolare viene mossa in una regione
dello spazio nella quale il campo magnetico è dato
~ = (6 − y, 0, 0) T . Ponendo che per t = 0,
da B
la spira si trovi nella posizione indicata, trovare la
fem nella spira in funzione di t se v = 2 m/s. [R:
0, 2 V]
6. Nella figura a fianco, il lato del quadrato è di 2.0 cm.
Nella regione vi è un campo magnetico, in direzione
normale e uscente dal foglio, la cui intensità è pari
a B = 4.0t2 y T.
Si determini la f.e.m. indotta lungo il quadrato a
t = 2.5 sec. e il suo verso
[R: 8 · 10−5 V, senso
orario].
7. Nella figura a fianco, è rappresentata una bacchetta conduttrice di massa m e di lunghezza L che può
scivolare senza attrito. Il generatore G fa circolare
nel circuito una corrente costante I.
a) Si determini la velocità della bacchetta in funzione del tempo, supponendo
che la bacchetta sia ferma a t = 0.
[R: v = IBLt/m]
b) Si sostituisca al generatore una batteria che fornisce una f.e.m costante Σ.
Si dimostri che la velocità tende a un valore costante e si determini il suo
valore.
[R: v∞ = Σ/BL]
c) Quanto vale la corrente nella bacchetta in questo limite? I = 0
d) Trova la corrente in funzione del tempo
SUPSI-DTI
Corso di Fisica e Modellistica
Prof. Andrea Danani