3. I disturbi della percezione spaziale.
Questo è uno degli argomenti più affascinanti, perché apre problemi non
soltanto filosofici, antichi forse quanto l’uomo.
Dando per scontato che il mondo esterno esiste, è un dato di fatto che dipende
dalla elaborazione dei nostri organi di senso (potrebbe essere, a tutti gli effetti, una
allucinazione!
E se per reale intendiamo quello che possiamo vedere, sentire, toccare, odorare,
beh, allora la realtà è composta semplicemente da segnali elettrici interpretati dal
nostro cervello!
Sono molte le osservazioni che dimostrano l’importanza dell’intervento del
nostro cervello e del nostro apparato sensoriale nella percezione di quella
che chiamiamo “la realtà”.
Ad esempio, il mondo fisico risponde alle leggi della geometria euclidea (gli oggetti
mantengono la stessa forma e la stessa dimensione quando si muovono nello
spazio; la somma degli angoli interni di un triangolo è di 180°; due rette parallele
non si incontrano mai ecc.), ma la geometria delle immagini del mondo proiettate
sulla nostra retina non è euclidea, visto che il mondo tridimensionale viene
proiettato su una superficie bidimensionale e curva (la retina, appunto).
Per vedere il mondo reale -che risponde a regole di tipo euclideo- è evidente che il
mio sistema visivo deve rielaborare un input.
• E’ geometricamente impossibile, per il sistema visivo, creare una ricostruzione
identica dello spazio euclideo.
• Sulla base delle immagini retiniche possiamo solo avere un’indicazione sulla
possibile struttura dello spazio e degli oggetti in esso disposti.
E allora: come fa un osservatore (umano) a percepire lo schema spaziale delle
superfici che compongono il suo ambiente, a partire soltanto dalla luce riflessa da
queste superfici (che è quella che impressiona la retina)?
82
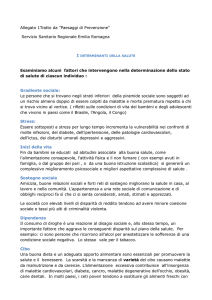
Affinché sia possibile avere una percezione spaziale, è necessario che
l’ambiente specifichi una certa quantità ed un certo tipo di informazioni, che
possano essere percepite dal nostro sistema visivo.
Avere percezione dello spazio circostante significa percepire diverse
caratteristiche dell’ambiente visibile.
L’insieme di tali caratteristiche si può definire il nostro schema spaziale:
•
•
•
•
Dimensioni delle superfici visibili.
Loro distanza.
Loro forma.
Loro orientamento.
Queste informazioni (specificate dall’ambiente e rese percepibili dal nostro sistema
visivo) si comportano come indizi, che il sistema visivo utilizza, per esempio, per
ricostruire gli aspetti tridimensionali dell’ambiente.
Vi sono indizi di
• Profondità monoculare: non necessitano obbligatoriamente delle informazioni che
provengono da entrambi gli occhi.
• Profondità binoculare
destinati a combinarsi per fornire una rappresentazione coerente dello spazio.
Il discorso si fa complesso, ne faremo qualche esempio, senza entrare troppo nei
dettagli, pur assai interessanti.
a. Indizi di profondità monoculare:
• Occlusione: può essere utilizzato quando un oggetto occlude la visione di un altro
oggetto. Ci da informazioni sull’ordine e sulla posizione relativa degli oggetti (senza nulla
dirci sulla distanza). Per inferire informazioni sulla profondità, il sistema visivo si basa
sulle assunzioni circa la forma degli oggetti (la configurazione che percepiamo è
determinata dalla nostra esperienza passata/ le figure in parte occluse vengono
completate in accordo con la frequenza delle forme incontrate in precedenza).
• Grandezza relativa: un confronto della grandezza di due oggetti, senza sapere nulla
della loro grandezza in senso assoluto. L’immagine retinica formata da un oggetto
diventa più piccola quanto più l’oggetto è lontano > sappiamo che gli oggetti più piccoli
sono più lontani (ed utilizziamo questo indizio di profondità).
• Altezza relativa: normalmente oggetti a distanze diverse dall’osservatore, appoggiati sul
terreno, formano immagini ad altezze diverse sulla retina > quindi, gli oggetti più vicini
saranno proiettati sulla parte bassa del campo visivo, mentre quelli più lontani sulla parte
alta.
83
• Gradiente di tessitura: (esempio: le fenditure di un terreno arido/ un campo omogeneo
di girasoli) cambiamenti sistematici della forma e della dimensione di piccoli elementi
della tessitura vengono utilizzati per percepire la distanza e la profondità (ed anche
forma ed orientamento).
• Grandezza familiare: si possono ottenere informazioni sulla profondità avendo una
conoscenza a priori della grandezza di un oggetto.
• Prospettiva aerea: un indizio di profondità, che si basa sulla conoscenza implicita che
l’atmosfera diffonde la luce. Maggiore la quantità di atmosfera tra osservatore ed
oggetto, maggiore è la dispersione della luce > gli oggetti soggetti ad una maggiore
dispersione della luce appaiono più sfumati e sono quelli più lontani (es.: nebbia/
foschia).
• Prospettiva lineare: indizio di profondità che si basa sulla conoscenza che le linee
parallele nel mondo 3D sembrano convergere in una immagine 2D (Punto di fuga= il
punto immaginario dello spazio in cui linee parallele convergono).
• Luci e ombre: indizio basato sulla conoscenza a priori del posizionamento delle luci,
delle ombre e delle forme degli oggetti nel mondo 3D e di come queste si proiettano in
un’immagine 2D.
• Movimento: nuove fonti di informazione spaziale derivano dal movimento (superfici
lontane divengono più vicine, superfici o parti di superfici nascoste divengono visibili) > le
immagini di oggetti poste a distanze differenti dall’osservatore si muovono a diverse
velocità sulla retina. Quando l’osservatore si muove lungo una linea retta, il suo
movimento produce un cambiamento nella direzione angolare di molti punti percepiti
(Flusso ottico).
• Accomodazione e vergenza: nella prima -monoculare- l’occhio cambia il suo fuoco,
nella seconda -binoculare- gli occhi ruotano verso l’interno o verso l’esterno.
La costruzione dell’immagine tridimensionale del mondo, partendo da uno spazio
bidimensionale (come quello in cui si formano le immagini retiniche) è uno dei
problemi fondamentali che il sistema percettivo visivo si trova ad affrontare.
• Come fa il sistema visivo a decidere che cosa si sta effettivamente vedendo?
Qual è l’interpretazione più plausibile?
• Tutti gli indizi di profondità mono- e binoculari sono combinati insieme
(inconsciamente) in accordo con quelle che sono le nostre conoscenze pregresse
(conoscenza a priori).
Ma quando le nostre inferenze risultano errate, ecco che si
formano le illusioni.
84
Esempi di grandezza (ed altezza) relativa.
Esempi di gradiente di tessitura
85
Prospettiva aerea
86
Punto di fuga
Luci e ombre
87
ILLUSIONI
88
89
90
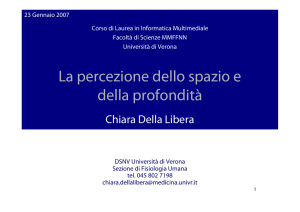
È stata inventata dall'oftalmologo americano Adelbert Ames nel 1946 su
un'idea di Hermann Helmholtz.
La stanza è costruita in modo che vista frontalmente appaia come una
normale stanza a forma di parallelepipedo, con due pareti laterali verticali
parallele, una parete di fondo, un soffitto ed un pavimento paralleli
all'orizzonte. In realtà la pianta della stanza ha forma di trapezio, le pareti
sono divergenti ed il pavimento ed il soffitto sono inclinati. Le inclinazioni e le
proporzioni nella dimensione degli elementi posti alle diverse profondità sono
calcolate tenendo conto delle regole della prospettiva.
Per effetto dell'illusione una persona in piedi in un angolo della stanza appare
essere un gigante, mentre un'altra persona situata nell'angolo opposto
sembra minuscola. L'effetto è così realistico che una persona che cammini da
un angolo all'altro sembra ingrandirsi o rimpicciolirsi.
Alcuni studi hanno dimostrato che l'illusione si può avere anche senza
l'utilizzo di pareti e soffitto, ma è sufficiente creare un orizzonte apparente (in
realtà non orizzontale) su un appropriato sfondo. L'occhio valuta la
dimensione degli oggetti in funzione del finto orizzonte.
91
92
Un elemento di grande importanza -quando si parla di percezione spaziale- è
rappresentato dalla visione
tridimensionale (o stereoscopica).
Per spiegare la visione stereoscopica, possiamo fare un piccolo esperimento. Poniamo
una mano davanti a noi e, con l’altra, chiudiamo prima l’occhio destro e poi quello sinistro.
Il risultato è che la mano ci sembrerà spostarsi da destra verso sinistra, pur essendo
rimasta ferma.
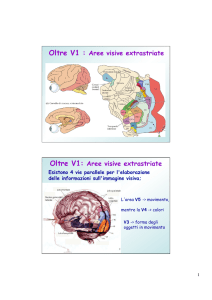
Nella figura qui di seguito sono simulate le immagini di una stessa scena, catturate
dall’occhio destro e sinistro. Se si osservano con attenzione, si notano delle differenze (ad
esempio, la bandiera italiana di fronte al palazzo è più evidente nella foto a sinistra). Gli
occhi, infatti, registrano due immagini diverse, poichè la distanza e l’angolazione con cui
un qualsiasi oggetto viene fissato non sono perfettamente uguali nei due occhi.
Noi vediamo un’unica immagine in quanto il cervello, attraverso un processo detto
stereopsi, le fonde tutt’e due e ne sfrutta la disparità, restituendoci -con una sorta di
calcolo trigonometrico- la terza dimensione dello spazio: la profondità.
Potendo determinare, anche se solo grossolanamente, la distanza alla quale è situato un
oggetto nello spazio in relazione alla nostra posizione, possiamo parlare di visione
tridimensionale o stereoscopica.
93
La possibilità della visione binoculare è alla base del fenomeno della
stereopsi (che deriva dalla stimolazione simultanea delle retine).
Il presupposto indispensabile per l’organizzazione della visione binoculare è che entrambi
gli occhi osservino una stessa area dello spazio, e che non siano presenti deviazioni degli
assi visivi: l’immagine visiva viene quindi proposta sul piano retinico da entrambi gli
occhi.
Sinteticamente, sono tre i fenomeni che consentono la percezione binoculare:
1. Percezione simultanea: rappresentata dalla capacità di entrambi gli occhi di
apprezzare e trasmettere al cervello, nello stesso istante, la medesima
immagine.
2. Fusione: capacità visiva successiva, che presenta una componente motoria
(implica l’attività dei muscoli estrinseci oculari, per il posizionamento degli assi visivi
sull’oggetto osservato) ed una sensitiva (relativa alla capacità psichica di formare, da
due immagini retiniche simili, una rappresentazione visiva singola).
3. Stereopsi: capacità percettiva che consente di unire le immagini provenienti dai
due occhi, che -a causa del loro posizionamento strutturale- presentano uno
spostamento laterale. Questa disparità permette al cervello di avere informazioni su
profondità e posizione spaziale dell’oggetto mirato.
94
Vi risparmio il grande capitolo dei test diagnostici e delle varie modalità
rieducative o terapeutiche (anche chirurgiche) della stereopsi, che sono
principalmente di competenza ortottica.
95
Elaborazione cerebrale dell’immagine stereoscopica. In condizioni
naturali, e in presenza di numerosi oggetti disposti a varie distanze, diventa
molto complesso interpretare la disparità delle immagini dei due occhi e il
cervello deve risolvere il problema della corrispondenza di queste
immagini. Questo è un problema che il cervello affronta continuamente e
che risolve quasi sempre con successo, anche in situazioni molto
complesse come sono quelle fornite dagli stereogrammi per punti
casuali, utilizzati per la prima volta da Bela Julesz (1964), riprodotti nella
figura della pagina precedente. In questa situazione sperimentale
l’immagine monoculare non contiene nessuna informazione di forma e
quindi nessun indizio su come associare le immagini nei due occhi per
elaborare la disparità. L’informazione di tridimensionalità è contenuta
nella disparità retinica del singolo quadratino, elemento base
dell’immagine. Dopo alcuni istanti di osservazione di questi stereogrammi
casuali si percepisce la forma 3D, con acuità e sensibilità stereoscopica
simile a quelle ottenute per stimoli naturali. Il meccanismo alla base
dell’analisi della s. sono le cellule binoculari corticali ( visione) del lobo
occipitale, cioè i neuroni che rispondono a input che colpiscono entrambi
gli occhi. La maggior parte delle cellule binoculari risponde con una più
alta frequenza di scarica quando i due occhi sono stimolati da immagini
con zero disparità; molte altre però sono eccitate quando le due immagini
corrispondono a disparità incrociate e inibite per disparità omonime; altre
ancora eccitate per disparità omonime e inibite per disparità incrociate. La
stima della possibile distanza dell’oggetto nasce quindi dal paragone delle
attività di questi tre diversi tipi di neuroni, analogamente a come il colore
di un oggetto è stimato dalle attività relative dei tre coni. Nel corso
dell’evoluzione ontogenetica, la percezione della terza dimensione sembra
emergere quasi improvvisamente tra il terzo e il quarto mese di vita, per
raggiungere i 60″ di arco intorno ai 6 mesi. I valori tipici dell’adulto, di
alcuni secondi di arco, sono raggiunti solo dopo alcuni anni.
96