UNIVERSITÀ DEGLI STUDI DI TRIESTE
Dipartimento di Fisica
Corso di Laurea Triennale in Fisica
Tesi di Laurea Triennale
Studio di sensori ambientali su
fibra ottica per l’esperimento
Belle II
Relatore:
prof. Lorenzo Vitale
Laureando:
Andrea Tomasin
Correlatore:
prof. Livio Lanceri
Anno accademico 2014 – 2015
– Ottobre 2015 –
Indice
1 Introduzione
1.1 Belle II e SuperKEKB . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Vertex Detector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Controllo dei parametri ambientali . . . . . . . . . . . . . . . . . . .
2 Sensori a fibra ottica
2.1 Tipi di sensori . . . . . . . . .
2.2 Principi di funzionamento . .
2.3 Sensori a reticolo di Bragg . .
2.4 Uso in fisica delle Alte Energie
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3 Controllo della temperatura nel SVD di Belle II
3.1 Geometria del rivelatore di vertice . . . . . . . . .
3.2 Condizioni ambientali . . . . . . . . . . . . . . . .
3.3 Prestazioni richieste . . . . . . . . . . . . . . . . .
3.4 Disposizione delle fibre ed interconnessioni . . . .
3.5 Lettura dei dati . . . . . . . . . . . . . . . . . . .
4 Misure e calibrazioni in laboratorio
4.1 Strumentazione . . . . . . . . . . .
4.2 Azioni preliminari alla misura . . .
4.3 Misure in camera climatica . . . . .
4.4 Procedura di calibrazione . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
2
3
.
.
.
.
5
. 5
. 8
. 9
. 12
.
.
.
.
.
.
.
.
.
.
13
13
15
16
17
18
.
.
.
.
19
19
22
24
24
.
.
.
.
5 Conclusioni
33
Bibliografia
35
ii
Capitolo 1
Introduzione
In questa tesi presento una procedura di calibrazione di sensori a fibra ottica a reticolo di Bragg.
L’interesse è dovuto al controllo delle condizioni ambientali nel rivelatore di vertice
dell’esperimento Belle II che si svolgerà in Giappone presso il collisore SuperKEKB.
In questa introduzione descrivo brevemente l’apparato di Belle II e il collisore SuperKEKB.
Il capitolo 2 è dedicato alla descrizione dei sensori a fibra ottica, e delle principali
tecnologie recentemente sviluppate in questo settore.
Nel capitolo 3 viene discusso il sistema di controllo della temperatura nel rivelatore
SVD di Belle II.
Nel capitolo 4 descrivo la messa a punto di procedure per la calibrazione dei sensori
di temperatura su fibra e i risultati delle misure eseguite in laboratorio.
Dai risultati ottenuti vengono infine trattate delle indicazioni su come ottimizzare la
procedura di calibrazione e migliorare l’accuratezza nella misura della temperatura
con i sensori scelti.
1.1
Belle II e SuperKEKB
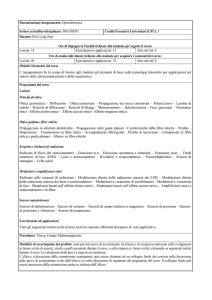
Nel 2010 è stato approvato il nuovo progetto Belle II [1]. L’esperimento avrà luogo
in Giappone al laboratorio KEK utilizzando un’evoluzione del collisore chiamato
KEKB; SuperKEKB (Figura 1.1 a sinistra). Esso garantirà una luminosità di due
ordini di grandezza superiore a KEKB, aumentando il numero di collisioni e quindi
il numero di eventi prodotti. SuperKEKB è un collisore asimmetrico, ovvero fa collidere elettroni e positroni con energie differenti, rispettivamente di 7 GeV nel High
Energy Ring e 4 GeV nel Low Energy Ring, con un’angolazione di 83 mrad nella
zona d’interazione.
L’apparato sperimentale Belle II (Figura 1.1 a destra) è progettato per registrare il
passaggio delle particelle che emergono dalla zona d’interazione, misurandone tutte
1 – Introduzione
2
Figura 1.1. Visualizzazione del collisore SuperKEKB e dell’apparato sperimentale
di Belle II [1].
le proprietà, per identificare e ricostruire gli eventi di annichilazione o di collisione
tra le particelle dei due fasci. A tale scopo, verranno utilizzati diversi rivelatori, tra
cui i rivelatori di tracce di particelle cariche: il VXD (Vertex Detector ) ed la CDC
(Central Drift Chamber ).
Uno degli obbiettivi di questo esperimento è lo studio della violazione della simmetria per coniugazione di carica e parità (CP) nei decadimenti dei mesoni B [1].
La violazione di tale simmetria si ha quando sistemi fisici ottenuti per scambi tra
particelle ed antiparticelle e riflessione delle coordinate spaziali risultano avere un
comportamento diverso.
La violazione CP sui mesoni B fu studiata già nel 2002 grazie agli esperimenti BaBar
e Belle [2], che furono i primi ad osservarla al di fuori del sistema dei mesoni K, nel
quale fu osservata per la prima volta la violazione di CP [3].
1.2
Vertex Detector
L’obbiettivo di questa tesi è il monitoraggio delle temperature del rivelatore di vertice (VXD) raffigurato in figura 1.2, in particolare del Silicon Vertex Detector (SVD).
Questo strumento è in grado di tracciare con un’alta precisione e accuratezza i vertici primari di interazione e quelli secondari di decadimento. È formato da due tipi
di rivelatori: il silicon PiXel Detector (PXD) e il SVD.
Il PXD è formato dai due strati più vicini all’interazione dei fasci e consiste in DE-
1 – Introduzione
Figura 1.2.
3
Schema del rivelatore di vertice.
Pleted Field Effect Transistor (DEPFET) [1].
Il SVD è formato da quattro strati più esterni e consiste in sensori di rivelazione a
micro-strip di silicio a doppia faccia (DSSD Double-Sided silicon Strip Detectors) [1].
Il funzionamento di un rivelatore a semiconduttore può essere cosı̀ brevemente descritto: quando la particella passa attraverso il rivelatore, si formano lungo la sua
traiettoria coppie di elettrone e lacuna, che sotto l’azione del campo elettrico applicato al sensore si sposteranno verso gli elettrodi inducendo un segnale elettrico.
1.3
Controllo dei parametri ambientali
La potenza dissipata dai PXD DEPFETs e dalla loro elettronica si aggira sui 18 W
per modulo, quindi in totale 360 W per 20 moduli PXD. L’elettronica di lettura del
SVD, formato da circuiti integrati APV25, dissipa in totale una potenza pari a 700
W [4].
La temperatura del rivelatore di vertice deve rimanere in tutta la durata dell’esperimento attorno ai 15 ; quindi per sottrarre la potenza totale dissipata si utilizza
un sistema di raffredamento basato sullo scambio di calore con sottili tubi, in cui
circola un fluido di CO2 bifase (liquida e gassosa) a temperatura di -30 .
Per il monitoraggio delle temperature in diverse parti dell’apparato strumentale vengono utilizzati due tipi di sensori: i termistori NTC (Negative Thermal Characteristic) e i sensori a fibra ottica a reticolo di Bragg, dei quali descriverò le applicazioni
e le caratteristiche nel seguito.
I sensori NTC e i sensori a fibra ottica hanno un differente scopo di utilizzo: i primi
servono al controllo delle temperature dei tubi di raffreddamento in cui circola la
CO2 , mentre i secondi sono utilizzati per il controllo delle temperature dei circuiti
1 – Introduzione
Figura 1.3.
(SVD).
4
Rappresentazione di uno dei moduli del Silicon Vertex Detector
integrati di lettura, in particolare di quelli situati sui moduli del SVD. Un esempio
di modulo è raffigurato in figura 1.3.
Capitolo 2
Sensori a fibra ottica
In questo capitolo vengono richiamati i principi di funzionamento di diversi tipi di
sensori su fibra ottica.
2.1
Tipi di sensori
Le fibre ottiche sono filamenti di materiali vetrosi o polimerici, realizzati in modo da
poter condurre la luce al loro interno. Essi hanno trovato importanti applicazioni in
molti campi, tra i quali le telecomunicazioni e le diagnostiche ambientali.
La trasmissione del’onda elettromagnetica può essere di due tipi: monomodale, in
cui il campo elettromagnetico si propaga seguendo un unico modo di propagazione;
o multimodale, in cui si propaga seguendo più modi di propagazione. Nel nostro
caso verranno utilizzate fibre monomodali.
Non tutte le lunghezze d’onda sono adatte alla trasmissione ottica; esistono tre
‘‘finestre’’ di trasmissione con prestazioni e costi crescenti:
la prima attorno a 850 nm, utilizzata da laser a diodo con luce multimodale;
la seconda attorno a 1310 nm, per laser multimodali o monomodali;
la terza attorno a 1550 nm, per laser monomodali.
I principali vantaggi delle fibre ottiche sono:
bassa attenuazione, che permette la trasmissione su lunga distanza;
grande velocità di trasmissione;
immunità da interferenze elettro-magnetiche;
peso ed ingombro modesto;
ottima resistenza a diverse condizioni ambientali.
2 – Sensori a fibra ottica
6
Questi vantaggi ed il piccolo ingombro dei sensori lungo le fibre sono il principale
motivo di utilizzo dei sensori a fibra ottica in Belle II.
Le fibre monomodali sono formate da diversi strati (come si può vedere in figura 2.1):
Figura 2.1.
Strati della fibra ottica [5].
1. Core (nucleo cilindrico centrale), tipicamente con diametro di 8 µm. Nel core
si ha la riflessione totale interna, questa è ottenuta con un opportuno indice
di rifrazione n, diverso da quello dello strato successivo (n'1.5 [5]).
2. Cladding (mantello) con diametro di 125 µm. Il mantello ha un indice di rifrazione n tale da mantenere quasi tutto il fascio luminoso nel nucleo (tipicamente
n'1.475 [5]).
3. Coating (rivestimento) con diametro di 250 µm. Protegge core e cladding ed in
base al materiale le suo proprietà ottiche possono essere sensibili a parametri
ambientali, quali l’umidità. Una fibra in acrilato ha una sensibilità trascurabile
all’umidità, mentre una in silice ne è molto sensibile.
4. Jacket (guaina) con diametro tra i 400 µm e i 900 µm. È un rivestimento
che protegge la fibra. A seconda delle applicazioni, vengono usati ulteriori
rivestimenti.
Ci sono diversi tipi di sensori a fibra ottica (FOS); una classificazione si ha in base
al tipo di reticolo e al modo di propagazione [6], come si vede in figura 2.2.
Sensori a reticolo di Bragg (FBGs), il cui reticolo è uniforme ed accoppia
propagazione dell’onda e riflessione nel core. I reticoli sono formati da bande di
cambiamento dell’indice di riflessione con distanze uguali tra quelli adiacenti,
2 – Sensori a fibra ottica
7
quindi lo spettro di riflessione è stretto e con una lunghezza d’onda centrale
di massima riflessione λB . L’attenuazione è trascurabile per le altre lunghezze
d’onda.
Sensori a reticolo standard a lungo periodo (LPGs), che associano la propagazione dell’onda del core ad alcuni modi di propagazione del cladding.
Sensori a reticolo non uniforme (chirped fiber grating sensors), i quali hanno
uno spettro di riflessione più ampio rispetto a quelli a reticolo uniforme. La
maggiore ampiezza è dovuta al passo reticolare variabile lungo il reticolo.
Sensori a reticolo inclinato (tilted fiber grating sensors), che possono associare
la propagazione dell’onda nel core alle riflessioni dello stesso core e nel cladding.
Sensori a più reticoli (sampled fiber grating sensors), che possono riflettere
diverse lunghezze d’onda con spaziatura costante.
Figura 2.2. Tipi di reticolo. (a) Fibre a reticolo di Bragg,(b) a reticolo standard a lungo periodo,(c) a reticolo non uniforme,(d) a reticolo inclinato,(e) a più
reticoli [6].
Un’ulteriore classificazione si ha a seconda dei materiali con cui sono costruiti:
2 – Sensori a fibra ottica
8
Fibre ottiche in silice. Queste fibre sono in vetro e realizzate partendo da
silice ultrapura, che è ottenuta dalla reazione fra il tetracloruro di silicio e
l’ossigeno. Nel silicio destinato alla produzione del core viene aggiunto del
germanio (sotto cloruro di sodio) per l’aumento dell’indice di rifrazione senza
variare l’attenuazione. Nel silice destinato al cladding, invece, viene aggiunto
del boro per ridurre l’indice di rifrazione [5].
Fibre ottiche in materiale plastico. Queste sono fibre in materiale plastico.
Con esse è possibile realizzare fibre multimodali, inoltre hanno un’attenuazione
abbastanza elevata e scarsa resistenza termica. Hanno una variazione lineare
del costo con la lunghezza, come per le fibre in vetro, ma garantiscono una
maggiore capacità di trasmissione dei dati [5].
2.2
Principi di funzionamento
Nel precedente paragrafo abbiamo elencato alcune divisioni per i sensori a fibra
ottica; ora descriverò brevemente le tipologie più utilizzate come sensori a livello
infrastrutturale e di laboratorio [7]:
Sensori a reticolo a passo lungo (LPGs) [8] sono caratterizzati da una modulazione periodica dell’indice di rifrazione del core di una fibra ottica monomodale. L’effetto di tale modulazione sulla radiazione guidata è l’accoppiamento
dell’energia associata al modo fondamentale del core con quella associata ai
modi del cladding, i quali vengono attenuati a causa delle sue proprietà assorbenti. Per questo motivo, lo spettro di trasmissione di un sensore LPG mostra
una serie di picchi di perdita del segnale alle lunghezze d’onda alle quali si
verifica l’associazione. Tali lunghezze d’onda di risonanza dipendono sia dal
passo del reticolo, sia dalle costanti di propagazione dei modi del mantello.
Le lunghezze d’onda di risonanza dei sensori sono calcolati con la seguente
formula per ogni m-esimo modo del cladding
λLP G =| nco − ncl (m) | Λ
(2.1)
Questi sensori furono sviluppati inizialmente nell’uso di sistemi di comunicazione come filtri passa basso [7]; successivamente, grazie alla dipendenza della
risonanza dagli indici di rifrazione di core e cladding, furono sviluppati come
sensori di temperatura e deformazione (strain), con dipendenza dal passo del
reticolo Λ, il quale viene modificato in seguito ad un’espansione termica.
Sensori a reticolo di Bragg (FBGs): questi sensori, ottenuti anch’essi da una
modulazione periodica dell’indice di rifrazione del core di una piccola parte
(dai 5 mm ai 10 mm [9]) della fibra ottica, sono modulati per mezzo di una
esposizione a dei raggi UV, come i sensori LPG; il tratto di fibra modificato si
2 – Sensori a fibra ottica
9
comporta come filtro, che seleziona particolari lunghezze d’onda alle quali la
luce viene riflessa. La riflessione massima avviene per
λB = 2nef f Λ
(2.2)
varia in base all’indice di rifrazione nef f e al passo del reticolo Λ. Questa
dipendenza mi determina il legame dalle proprietà fisiche e meccaniche del
reticolo, per questo motivo possiamo utilizzarli come sensori di temperatura,
di deformazione o di qualche altra proprietà fisica. Un’importante applicazione
di questo tipo di sensori si ha nel monitoraggio delle condizioni ambientali ad
esempio in esperimenti di fisica delle particelle e nel controllo strutturale di
infrastrutture.
Sensori in fibre ottiche in silice: questi sensori sono caratterizzati da un drogaggio della fibra in silice da parte di elementi attivi, per esempio da erbio,
tulio, neodimio, ecc.; il silicio drogato diventa termoelastico e le sue proprietà
ottiche dipendono in modo importante dalla temperatura. Essi vengono utilizzati come sensori di temperatura in ambienti estremi; sono più duttili ed
hanno bassa attenuazione rispetto ai sensori in fibra plastica.
Sensori in fibre ottiche di materiale plastico (POFs): questo tipo di sensori
sono un’alternativa ai sensori in fibra in silice; a differenza di queste sono impermeabili all’umidità, hanno un’alta resistenza meccanica e sono più robuste.
Come quelle in silice, però sono termoelastiche e le proprietà ottiche dipendono
dalla temperatura.
2.3
Sensori a reticolo di Bragg
Figura 2.3.
Bragg [10].
Schematizzazione del funzionamento dei sensori a reticolo di
Per l’esperimento Belle II si è scelto di utilizzare dei sensori a fibra ottica a reticolo di Bragg (FBGs) in base ai positivi risultati ottenuti da altri esperimenti, ad
esempio CMS (Compact Muon Solenoid ) [11]. Questi sensori [12] sono realizzati con
2 – Sensori a fibra ottica
10
un’esposizione del core della fibra ottica monomodale ad un raggio di luce ultravioletta.
Ci sono due metodi per formare il reticolo di Bragg :
Metodo olografico, [13]. Questo metodo consiste nella modulazione periodica dell’indice di rifrazione, tramite l’esposizione del core a due fasci di
radiazione UV di lunghezza d’onda λU V , con inclinazione che differisce per un
angolo θ. Il periodo del reticolo risulta essere:
Λ=
λU V
2sin( 2θ )
(2.3)
Metodo non olografico [14]. Questo metodo consiste nella modulazione
periodica dell’indice di rifrazione esponendo il core ad un fascio di luce UV
ad incidenza normale. Nell’articolo di Hill [14] la fibra viene esposta ad una
maschera con un raggio UV (fascio ad eccimeri di fluorite con lunghezza d’onda
pari a 249 nm) con una pulsazione di 12 ns a 50 Hz per 20 min. Quindi il
periodo del reticolo di Bragg risulterà di circa 530 nm e la riflessione massima
sperimentale si ha per la lunghezza d’onda 1531 nm.
Questa modifica del core della fibra si comporta come uno specchio selettivo della
lunghezza d’onda, come schematizzato in figura 2.3. La massima riflettività si ha
per la lunghezza d’onda di Bragg λB dato da
λB = 2nef f Λ
(2.4)
Come si può notare dalla formula 2.4, la lunghezza d’onda varia in base all’indice
di rifrazione efficace nef f e il periodo della griglia Λ; questo legame determina la dipendenza dalle proprietà fisiche e meccaniche del reticolo, ovvero dalla temperatura
e dalla deformazione (strain).
La dipendenza da queste due proprietà in prima approssimazione può essere scritta
come:
∆λB = λB (1 − ρα )∆ + λB (α + ξ)∆T
(2.5)
dove ∆λB è la variazione della lunghezza d’onda di Bragg, ρα , α e ξ sono rispettivamente la costante fotoelastica, il coefficiente di espansione termica ed il coefficiente
termo-ottico della fibra, mentre ∆ e ∆T sono le variazioni della deformazione e
della temperatura.
Nel caso delle fibre in silice, drogate nel core con germanio, la costante fotoelastica
è uguale a 0.22 µ−1 dove µ è un’unità adimensionale che consiste nel rapporto
tra: variazione di lunghezza e lunghezza iniziale dell’oggetto, oppure se il materiale
è elastico è il rapporto tra: sforzo e modulo di Young. Il coefficiente di espansione
termica è di 0.55 x10−6 −1 ed il coefficiente termo-ottico è pari a 8.3x10−6 −1 [9].
Come abbiamo già accennato le caratteristiche degli FBGs sono:
2 – Sensori a fibra ottica
11
Una semplice modifica dell’indice di rifrazione del core di una fibra identifica il
sensore, a differenza di altri sensori a fibra ottica non cambiano le dimensioni.
L’immunità ai campi elettro-magnetici permette l’utilizzo dei sensori in ambienti con un’elevata radiazione.
La molteplicità di sensori lungo una fibra permette di monitorare un elevato
numero di posizioni.
La stabilità e un’inerzia termica molto piccola garantiscono un’elevata accuratezza nella misura.
La sensibilità a variazioni di temperatura e di deformazione permette di misurare entrambe le grandezze in modo accurato, ma bisogna mantenere invariata
quella che non interessa.
L’utilizzo degli FBG come sensori avviene inviando da un capo della fibra impulsi
luminosi monomodali da una sorgente ottica. Di questi segnali vengono riflessi quelli appartenenti a un piccolo intervallo di lunghezze d’onda, con riflessione massima
per la lunghezza d’onda centrale λB . Un ricevitore misura l’intensità degli impulsi
riflessi al variare della lunghezza d’onda.
Per il monitoraggio delle intensità del segnale riflesso, in funzione della lunghezza
d’onda si seguono diverse tecniche:
Un interferometro, converte gli spostamenti di lunghezza d’onda in sfasamenti, che possono essere rilevati da variazioni di intensità della luce al variare della differenza di percorso. Questa tecnica ha un’elevata sensibilità, ma
l’attrezzatura è costosa e soggetta ad interferenze ambientali.
Un filtro ottico inclinato, può essere utilizzato per ottenere le variazioni di
lunghezza d’onda riflesse direttamente dalla variazione d’intensità. Esso può
essere anche un ulteriore reticolo di Bragg. Se il filtro è progettato per avere un
determinato rapporto tra luce trasmessa e riflessa, allora è possibile determinare la lunghezza d’onda comparando le intensità trasmesse e riflesse. Questo
metodo è quello più semplice ed economico, ma ha lo svantaggio di indirizzare
un solo reticolo alla volta.
Illuminazione degli FBG con una sorgente luminosa sintonizzabile a banda
stretta.
Ci sono due sistemi di lettura degli FBG:
Il WDM (Selettore a divisione di lunghezze d’onda). In questo selettore ogni
sensore è identificato grazie alla sua lunghezza d’onda. Le caratteristiche tipiche di questi sistemi sono l’alta sensibilità e l’accuratezza (per esempio nello
2 – Sensori a fibra ottica
12
strain sono rispettivamente 0.8 µ e 4 µ [12]), la moderata frequenza di campionamento (attorno un centinaio di Hz), la flessibilità e le relative grandi
dimensioni (dai 5 mm ai 10 mm [9]).
Il TDM (Selettore a divisione di tempo). In questo selettore ogni sensore è
identificato dal ritardo nello spettro temporale (ti = 2li nc in cui li è la lunghezza tra la posizone del sensore i-esimo e l’inizio della fibra). Tipicamente
questi sistemi hanno bassi costi, sono leggeri e robusti, hanno un’alta frequenza di campionamento, di pochi KHz [12]. I sensori però devono essere
sufficientemente spaziati fra loro da poterli identificare come diversi.
2.4
Uso in fisica delle Alte Energie
Sensori a fibra ottica sono stati usati nel controllo delle condizioni ambientali negli
esperimenti di fisica delle Alte Energie.
Un esempio di questa applicazione è il controllo della temperatura e dello strain
in uno dei quattro esperimenti di LHC (Large Hadron Collider ) al CERN, CMS
(Compact Muon Solenoid ) [11]. CMS è un grande rivelatore di particelle situato in
uno dei quattro punti di interazione di due fasci di protoni, accelerati dal collisore
adronico LHC.
I sensori FBG sono installati in diverse posizioni all’interno dell’apparato sperimentale, con un totale di circa 40 sensori per il monitoraggio della temperatura e dello
strain, contenuti in quattro fibre ottiche.
Uno studio dei FOS in CMS riporta le temperature registrate in continuazione per
un anno nel 2010 [15]. Le variazioni riscontrate sono in completo accordo con i cicli
di dissipazione di potenza dei dispositivi all’interno dell’apparato. L’accuratezza
nelle letture della lunghezza d’onda riflessa è di 1 pm, quindi i risultati erano accurati entro 0.1 in temperatura e 1 µ nello strain. Le misure di temperatura dei
FOS sono state confrontate con misure effettuate da sensori PT100 e sono risultate
compatibili, tenuto conto delle diverse posizioni e condizioni operative dei diversi
strumenti.
Anche le variazioni di strain misurate con le fibre seguivano i cicli di accensione del
magnete CMS e delle conseguenti deformazioni nelle strutture meccanica dell’apparato, queste variazioni risultavano coerenti dopo l’applicazione di correzioni per
compensare le variazioni di temperatura.
Queste misure furono anche utili a dimostrare la non-distruttività delle forze esercitate dall’apparato, ad esempio, sul tubo a vuoto del fascio.
Dopo la positiva esperienza del 2010, furono installati altri 60 sensori in due fibre
per monitorare la temperatura nell’intera caverna di servizio sotterranea, situata a
120 m dalla sala sperimentale.
Capitolo 3
Controllo della temperatura nel
SVD di Belle II
Un’applicazione dell’utilizzo dei sensori a fibra ottica si ha nel rivelatore Silicon Vertex Detector (SVD) dell’esperimento Belle II; in questo capitolo descrivo brevemente
il rivelatore di vertice, le condizioni ambientali dell’esperimento, le prestazioni richieste, la disposizione delle fibre, delle interconnessioni ed il metodo di lettura dei
sensori a fibra ottica.
3.1
Geometria del rivelatore di vertice
Il rivelatore di vertice di Belle II è formato da sei strati cilindrici: due del PiXel Detector (PXD), situati vicino alla zona di interazione tra elettroni e positroni dei fasci
circolanti nel collisore SuperKEKB e quattro del Silicon Vertex Detector (SVD), più
lontano dai fasci.
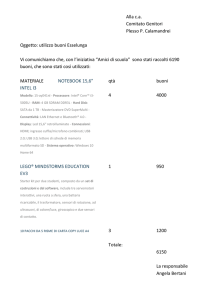
Il SVD è formato da quattro strati di DSSD (Double-Sided Strip Detectors, ovvero
rivelatori con elettrodi a strisce sulle due facce) inseriti nei ladders, i moduli che
formano ciascuno strato, i quali possono essere formati da moduli chiamati ‘‘origami” (un esempio è raffigurato in figura 3.1) o da moduli più semplici; i primi sono
controllati da chip posizionati sopra ad essi mentre i secondi da chip situati all’esterno del rivelatore di vertice. Per i chip dei moduli esterni al ladder è previsto un
controllo delle temperature tramite NTC, mentre per i moduli chiamati ‘‘origami”
è stato progettato un controllo tramite sensori a fibra ottica.
La disposizione dei quattro strati cilindrici è tale da avere una copertura angolare compresa tra 17° e 150° [1], come si può vedere in figura 3.2. Il primo strato
ha raggio minimo di 38 mm e il quarto strato ha raggio massimo di 140 mm; la
loro lunghezza va dai 262 mm ai 645 mm [1]. Nella tabella 3.1 sono indicate in
3 – Controllo della temperatura nel SVD di Belle II
14
Figura 3.1. Nella figura in basso è schematicamente rappresentato uno dei moduli, detti ‘‘ladder”, che compongono uno strato del rivelatore SVD. Si possono
distinguere cinque sensori DSSD: i tre sensori centrali vengono letti tramite circuiti integrati posizionati su circuiti flessibili che sono ripiegati sui sensori stessi,
e per questo vengono chiamati ‘‘origami”. La figura in alto rappresenta uno degli
‘‘origami”.
modo dettagliato le dimensioni, il numero di moduli, detti ‘‘ladder ’’ in ciascun strato del rivelatore SVD e gli angoli formati dalla parte terminale di ogni singolo ladder.
Tabella 3.1. Dimensioni, numero di sensori, origami e ladder degli strati del
SVD [1] e angolazioni delle parti terminali per ogni ladder.
Layer
Sensors/
Ladder
Origami/
Ladder
Ladders
Lenght
[mm]
Radius
[mm]
Slant Angle
[o ]
3
4
5
6
2
3
4
5
0
1
2
3
7
10
12
16
262
390
515
645
38
80
105
135
0
11.9
16
21.1
3 – Controllo della temperatura nel SVD di Belle II
15
Figura 3.2. Nella figura in alto sono visibili la disposizione dei quattro strati del
SVD e la copertura angolare [1]; nella figura in basso sono evidenziati i supporti
meccanici dei ladder e sezione longitudinale del rivelatore di vertice [1] in una
visione d’insieme.
3.2
Condizioni ambientali
Nella figura 3.3 è riportato un riassunto dettagliato della potenza dissipata dalle
diverse parti del rivelatore. Come possiamo notare la potenza dissipata dai Pixel
DEPFETs e dalle loro interfacce elettroniche è di 18 W per modulo, quindi 360 W
in totale per 20 moduli di PXD; inoltre i chip APV25 del SVD dissipano 700 W. Da
questo deduciamo che la potenza dissipata dall’intero rivelatore di vertice è di 1060
W.
Per rimuovere il calore in eccesso è previsto un sistema di raffreddamento basato
sullo scambio termico tra i principali fornitori di calore, ovvero i circuiti integrati e
i tubicini in cui fluisce CO2 bifase, ad una temperatura di -30 .
3 – Controllo della temperatura nel SVD di Belle II
16
L’ingresso e l’uscita del sistema di raffredamento tramite CO2 dev’essere tenuto
sotto controllo in modo adeguato quanto le temperature dei ladders degli SVD: in
questo caso verranno utilizzati dei termistori NTC.
L’intero volume del PXD/SVD, oltre ad essere tenuto ad una temperatura di circa
15 , deve avere bassa umidità, per prevenire la condensazione del vapore acqueo
con possibile danneggiamento dell’elettronica. Per mantenere un livello tale di umidità verrà flussato azoto secco con un basso punto di rugiada (dew point) inferiore
a -30 .
Figura 3.3.
strato [16].
3.3
Sistema di raffreddamento del VXD con la potenza dissipata da ogni
Prestazioni richieste
Per il rivelatore SVD sono richiesti sensori di temperatura per il monitoraggio sia
dei tubi di raffreddamento e sia delle sorgenti di calore presenti nei ladder.
Per il primo scopo bisogna misurare le temperature degli anelli di supporto, i quali
contengono i canali di distribuzione del fluido di raffreddamento; questo richiede
sensori NTC, come discusso nella sezione 1.3. Per i ladder, invece, vengono utilizzati
sensori a fibra ottica inseriti nei canali preparati nell’Airex (strato di materiale che
separa il circuito stampato dal sensore in silicio) degli strati 4, 5 e 6 per monitorare le
temperature dei moduli di ‘‘origami’’, per i quali è impossibile un controllo esterno.
L’intervallo di temperatura accettabile va dai -20 ai 25 ; senza raffreddamento
la temperatura dell’elettronica di ‘‘frontend ’’ potrebbe superare i 40 .
3 – Controllo della temperatura nel SVD di Belle II
17
La sensibilità in temperatura dei sensori utilizzati dev’essere di circa 0.1 ; i sensori
verranno letti con una frequenza di circa 1 Hz.
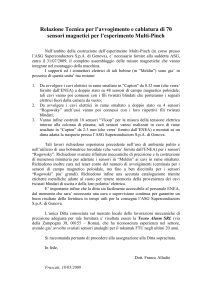
In figura 3.4 sono riportate le misure effettuate con una telecamera termica su un
prototipo del sistema del dispositivo di raffreddamento.
Figura 3.4. La figura a sinistra mostra la telecamera termica utilizzata per il
monitoraggio della temperatura nelle prove di funzionamento del raffreddamento
con CO2 . Nella figura in alto a destra viene rappresentata la temperatura nello
strato 6 durante una prova del sistema di raffreddamento in camera termica. La
figura in basso a destra è rappresentata la variazione di temperatura in funzione
della potenza dissipata e della distanza dal tubo di raffreddamento [16].
3.4
Disposizione delle fibre ed interconnessioni
Come detto sopra, per l’esperimento avremo un doppio approccio di monitoraggio
delle temperature per un controllo incrociato di esse. Gli NTC monitorano la temperatura del sistema di raffreddamento, mentre gli FBG sono inseriti nei ladders 4,
5 e 6 del SVD.
Entrambi i sistemi hanno bisogno di interconnessioni nelle DOCKs distanti 3 m dai
sensori. A causa dei vincoli meccanici solo negli strati 4, 5 e 6 è possibile usare i
sensori a fibra ottica.
3 – Controllo della temperatura nel SVD di Belle II
3.5
18
Lettura dei dati
Dallo schema della figura 3.5 si può notare che la lettura della risposta dei sensori
a fibra ottica avviene tramite l’interrogatore ottico sm225 di Micron Optics [17,
18]. L’interrogatore scannerizza ed acquisisce i dati di tutto lo spettro con elevata
accuratezza.
Per la calibrazione, l’acquisizione dei dati e gli allarmi viene utilizzato il software
ENLIGHT di Micron Optics.
Figura 3.5. Organizzazione della lettura dei sensori a fibra ottica a reticolo di
Bragg: due sensori FBG ad ogni ‘‘origami’’ più uno di controllo prima di uscire
dal ladder ed uno fuori dal ladder [4].
Capitolo 4
Misure e calibrazioni in
laboratorio
Lo scopo principale di questa tesi è la messa a punto di una procedura di calibrazione
delle fibre ottiche con sensori di temperatura a reticolo di Bragg, utili a monitorare
le temperature dei ladders del rivelatore di vertice SVD dell’esperimento Belle II.
In questa sezione verranno descritte la strumentazione utilizzata, le azioni preliminari alla procedura di calibrazione dei sensori e le misure effettuate in camera
climatica, con i risultati di calibrazione ottenuti.
4.1
Strumentazione
Lo scopo della procedura di calibrazione dei sensori di temperatura su fibra ottica
è determinare una formula di conversione delle lunghezze d’onda riflesse dai reticoli
di Bragg in temperatura. Si sono utilizzati una camera climatica con un ampio
intervallo di temperatura (almeno da -20 a 40 ), un termometro aggiuntivo, per
stabilire la temperatura all’interno del contenitore in cui vengono disposte le fibre,
con una precisione maggiore rispetto a quella dei sensori della camera climatica, ed
un interrogatore ottico per la lettura delle fibre con acquisizione e successiva analisi
dei dati.
Gli strumenti utilizzati, che descriverò in maggiore dettaglio nel seguito, sono :
Sensori in fibra ottica a reticolo di Bragg di lunghezze d’onda λ comprese tra
i 1512 nm e i 1536 nm;
Interrogatore ottico sm225-800 della ditta Micron Optics [17, 18];
Camera climatica per temperature comprese tra i -20 e i 40 ;
Sonda PT100 tarata con precisione di 0.1 ;
4 – Misure e calibrazioni in laboratorio
20
I dati sono stati acquisiti e analizzati con i seguenti programmi :
Programma ENLIGHT [18] per l’acquisizione e l’archiviazione delle temperature e delle lunghezze d’onda dei sensori;
Programma OriginLab [19] per il fit dei dati e per l’analisi di essi tramite
istogrammi.
L’oggetto da calibrare e tarare sono i sensori in fibra ottica a reticolo di
Bragg . I sensori sono identificati nella figura 4.1 con i cerchietti in rosso ed in blu.
Quelli in blu sono i sensori esterni al contenitore, che risentono maggiormente della
eventuale non uniformità di temperatura della camera climatica.
I sensori FBG sono in grado di riflettere una lunghezza d’onda specifica lasciando
passare tutto il resto dello spettro della luce laser dell’interrogatore ottico. Abbiamo
a disposizione 3 fibre da calibrare :
‘‘Smart fibres 139471’’ con 5 sensori a lunghezza d’onda nominale di 1528 nm,
1530 nm, 1532 nm, 1534 nm, 1536 nm;
‘‘Smart fibres 139470’’ con 8 sensori a lunghezza d’onda nominale di 1512 nm,
1514 nm, 1516 nm, 1518 nm, 1520 nm, 1522 nm, 1524 nm, 1526 nm;
‘‘Technica SA 101121402024’’ con 8 sensori a lunghezza d’onda nominale di
1512 nm, 1514 nm, 1516 nm, 1518 nm, 1520 nm, 1522 nm, 1524 nm, 1526 nm.
L’interrogatore ottico sm225-800 è uno strumento a 16 canali, in grado di
esaminare lunghezza d’onda che variano da 1510 nm a 1590 nm; ha una risoluzione
di 1 pm, ha un range dinamico (rapporto tra potenza del segnale e potenza del rulessa in mW
) e può
more convertita in dBm) pari a 40 dBm (dBm = 10 log P otenza rif
1mW
supportare 320 sensori FBG. È inoltre provvisto di un multiplexer al suo interno con
diverse frequenze di campionamento a seconda del numero di canali letti: 4 canali
a 2 Hz, 8 canali a 1 Hz, 16 canali a 0.5 Hz.
Per analizzare la variazione delle lunghezze d’onda rispetto alle variazioni di temperatura in un intervallo termico relativamente ampio, abbiamo usufruito di una
camera climatica in grado di lavorare tra -70 e 180 . La camera è provvista
di sensori per misurare la temperatura, con limitata accuratezza. Per una misura
più accurata della temperatura si è fatto uso di una sonda PT100. Un problema
rilevante ai fini della calibrazione in camera climatica è il continuo flusso d’aria che
ha lo scopo di uniformare la temperatura durante tutta l’operazione di lettura dati.
Come si può notare dalla figura 4.2 i sensori più esterni si trovano sopra le ventole
per il flussaggio dell’aria e possono quindi trovarsi in condizioni differenti rispetto
agli altri.
4 – Misure e calibrazioni in laboratorio
21
Figura 4.1. Rappresentazione della sonda PT100 rivestita in metallo (indicata in
verde), dei sensori interni (cerchiati in rosso) al contenitore e quelli che risentono
maggiormente della non uniformità della temperatura (cerchiati in blu). Le fibre
ottiche in uscita dal contenitore sono evidenziate in nero.
La sonda PT100 è una termoresistenza con risoluzione di 0.1 , che ha una
risposta più lenta rispetto ai sensori a fibra ottica.
Il software di acquisizione ed analisi dei sensori fornito dalla Micron Optics si
chiama ENLIGHT . Questo programma permette di identificare i massimi di riflessione, di assegnare una formula per la conversione delle lunghezze d’onda in
temperatura, di acquisire l’andamento temporale e di salvare i valori di riflessione
massima e di segnalare possibili allarmi collegati al particolare sensore.
4 – Misure e calibrazioni in laboratorio
22
Figura 4.2. Rappresentazione della strumentazione utilizzata, in particolar modo
della disposizione del contenitore contenente le fibre in camera climatica.
Per trovare i parametri di conversione da lunghezza d’onda a temperatura, abbiamo usato una regressione polinomiale dei valori misurati. Per questo abbiamo
utilizzato OriginLab che permette anche di visualizzare gli istogrammi di tutti i
sensori e valutare la qualità dei dati della calibrazione.
4.2
Azioni preliminari alla misura
Per effettuare la procedura di calibrazione sono stati scelti strumenti molto precisi,
col fine di avere una calibrazione con errori sistematici inferiori a 1 .
Si sono confrontate due fibre di ottima qualità, prodotte rispettivamente dalla Technica SA [20] e dalla Smart fibres [21]. Esse sono in grado di riflettere 80-90 % di luce
in corrispondenza delle lunghezze d’onda nominali con un rumore di fondo di circa
-50 dBm, mentre il segnale di riflessione varia tra i -6 dBm e i -26 dBm a seconda di
quante interconnessioni si trovino lungo le fibre. In figura 4.3 possiamo vedere un
esempio di acquisizione, tramite il programma ENLIGHT, dei massimi di riflessione
delle lunghezze d’onda dei sensori delle fibre calibrate, in questo caso le fibre sono
collegate direttamente all’interrogatore ottico, senza far uso di altre interconnessioni
(sdoppiatori).
Per avere il maggior segnale riflesso si sono utilizzati connettori monomodali del tipo
FC-APC (Fiber Connector Angled Physical Contact), con una superficie terminale
levigata con un angolo di 8°, che hanno un rapporto tra segnale e rumore di 60 dB.
Un ulteriore problema della misura è la possibile deformazione delle fibre, che per lo
4 – Misure e calibrazioni in laboratorio
23
strain indotto possono alterare le caratteristiche di riflessione. Quindi si è costruito
un contenitore per mantenere le temperature misurate dal termometro campione
uniformi per tutti i sensori e stabili durante l’acquisizione dei dati.
Lo studio sperimentale ha evidenziato che le fibre hanno un segnale di riflessione
pari a circa -10 dBm, per la Technica SA, e di -6 dBm, per la Smart fibres. Inoltre a
seconda dell’altezza del massimo di riflessione si possono individuare le posizioni dei
singoli sensori, il sensore più vicino ha il massimo più alto mentre il sensore più lontano ha massimo più basso. Questo aspetto è molto importante perché mi permette
di dire che il sensore riflette quasi tutto il segnale relativo ad una lunghezza d’onda e
trasmette altrettanto bene tutte le altre lunghezze d’onda. Quindi si può aggiungere
una vasta gamma di sensori in una singola fibra a lunghezze d’onda differenti.
Inoltre è stata valutata l’attenuazione delle interconnessioni per capire quanti attenuatori possono essere aggiunti senza far sovrapporre il rumore al segnale. Si è
notato che gli sdoppiatori 1x2 attenuano di 3 dBm ad ogni passaggio della luce
mentre gli sdoppiatori 1x4 attenuano di 7dBm. Per le nostre calibrazioni abbiamo
connesso direttamente la fibra all’interrogatore ottico.
Nella figura 4.3 sono visibili i massimi di riflessione per quattro fibre con sensori
a reticolo di Bragg; ognuna di essa è collegata in un canale differente dell’interrogatore. Si riesce a distingure perfettamente il numero di sensori per ogni fibra e la
lunghezza d’onda del picco di riflessione a temperatura ambiente.
Figura 4.3. Rappresentazione dei massimi di riflessione, acquisiti dal programma
ENLIGHT a temperatura ambiente delle quattro fibre da calibrare: due della Technica SA e due della Smart Fibres a 8 o a 5 sensori a fibra. La diversa colorazione
evidenzia la connessione di ciascuna fibra ad un canale differente.
4 – Misure e calibrazioni in laboratorio
4.3
24
Misure in camera climatica
La procedura di calibrazione dei sensori è stata svolta in tre fasi.
Inizialmente si sono acquisite le lunghezze d’onda per 5 temperature differenti (-20
, -5 , 10 , 25 , 40 ) con lo scopo di avere un numero sufficiente di dati per
una regressione polinomiale.
Poi si è proceduto con l’elaborazione dei dati alla ricerca della miglior regressione
polinomiale con i dati acquisiti.
Infine abbiamo verificato, grazie al programma ENLIGHT, se le temperature ottenute dai sensori FBG utilizzando la formula di conversione con i coefficienti della
regressione polinomiale riuscivano a riprodurre la temperatura misurata dalla sonda
PT100 di riferimento. Per questa operazione abbiamo utilizzato le stesse 5 temperature.
Un esempio si ha in figura 4.4. Come si può notare i sensori posizionati al bordo
del contenitore (linea tratteggiata arancione e nera in questo caso), raggiungono più
lentamente la temperatura misurata dagli altri sensori. La differenza tra il sensore
che segna il valore più alto e quello più basso di temperatura si attesta attorno ai
0.7 , in questo esempio.
4.4
Procedura di calibrazione
Per la procedura di calibrazione mi sono affidato al programma di analisi dati OriginLab, il quale mi ha permesso di trovare una buona approssimazione dei dati
acquisiti ad un polinomio del terzo ordine grazie ad una regressione polinomiale.
Qui di seguito verranno presentati i risultati ottenuti.
Regressione polinomiale
Una prima analisi dei dati mi ha indirizzato verso una regressione polinomiale. La
formula di calibrazione adatta è :
T = C0 + C1 ∗ (λ − λ0 ) + C2 ∗ (λ − λ0 )2 + C3 ∗ (λ − λ0 )3
(4.1)
con Ci i coefficienti della regressione polinomiale, λ0 il valore di lunghezza d’onda
nominale del sensore e T la temperatura riferita al corrispettivo valore di lunghezza
d’onda λ, misurata al massimo di riflessione del sensore FBG.
La regressione polinomiale consiste in un metodo di minimizzazione della somma
dei quadrati degli scarti di ciascuna misura dalla funzione approssimante (funzione
ottimale). Grazie a questa minimizzazione è possibile trovare il valore dei coefficienti
per il nostro polinomio.
Per avere una buona approssimazione della curva (R2 , coefficiente di correlazione,
di 0.99998 o 0.99999) bisogna avere un numero abbastanza alto di dati (un centinaio
4 – Misure e calibrazioni in laboratorio
25
Figura 4.4. Sono riportate in funzione del tempo le temperature ottenute da ciascun sensore, dopo l’immissione dei coefficienti della regressione polinomiale, nella
funzione di conversione da lunghezza d’onda misurata a temperatura. La temperatura della sonda PT100 misura -5.0 . In blu sono indicati due dei tre sensori
esterni al contenitore in cui sono adagiate le fibre. Le temperature misurate sono
compatibili entro 0.7
circa.
almeno).
Prendiamo come esempio tre sensori: uno con λ0 pari a 1532 nm della fibra Smart
Fibres a 5 sensori (lo chiameremo anche S1532X5), uno con λ0 pari 1512 nm della
fibra Technica SA a 8 sensori (T1512X8) ed uno con λ0 pari 1526 nm della fibra
Smart Fibres a 8 sensori (S1526X8).
La scelta di questi è dovuta al posizionamento dei sensori, che rispettivamente si
trovano in mezzo, alla fine e all’inizio della fibra di appartenenza : quindi potremo
analizzare l’andamento medio delle temperature all’interno del contenitore.
Dalla figura 4.5 l’andamento dei dati sembra lineare, ma un attento esame dei dati dimostra che l’andamento è ben rappresentato dal polinomiale dell’equazione 4.1.
I coefficienti C0 e C1 , mostrati in tabella 4.1, hanno un significato importante
per le nostre misure: C0 corrisponde alla temperatura riferita al valore λ = λ0 del
sensore e C1 fornisce il maggiore contributo alla conversione da λ − λ0 a variazione
di temperatura; gli altri due coefficienti del polinomio forniscono correzioni minori
4 – Misure e calibrazioni in laboratorio
26
Figura 4.5. Rappresentazione dell’andamento dei dati delle lunghezze d’onda in
funzione della temperatura. In ascissa è rappresentata la differenza tra i valori di λ
e λ0 espresso in nanometri mentre in ordinata la temperatura in gradi centigradi.
In ordine dall’alto verso il basso i tre sensori S1532X5, T1512X8, S1526X8.
alla conversione.
4 – Misure e calibrazioni in laboratorio
27
Tabella 4.1. La tabella evidenzia i coefficienti ottenuti dalla regressione polinomiale, gli errori sui coefficienti, la somma dei residui al quadrato ed il coefficiente
di correlazione per i tre sensori a reticolo di Bragg presi in considerazione.
C0
Errore su C0
C1
Errore su C1
C2
Errore su C2
C3
Errore su C3
Somma dei residui al quadrato
Coefficiente di correlazione R2
S1532X5
T1512X8
S1526X8
28.904
0.012
105.439
0.086
-6.87
0.80
11.3
1.5
0.3848
0.99999
41.380
0.029
103.56
0.52
-15.9
2.2
-4.8
2.6
1.02209
0.99998
12.307
0.012
105.87
0.12
-11.59
0.26
35.7
1.8
0.54847
0.99999
Un dato importante per valutare la regressione polinomiale è il valore del coefficiente di correlazione R2 in tabella 4.1: più R2 è vicino ad 1 meglio la funzione scelta
approssima l’andamento dei dati di lunghezza d’onda al variare della temperatura.
La figura 4.6 rappresenta l’analisi dei residui. Il programma calcola la differenza
tra il valore della temperatura misurata dalla PT100 e la temperatura ottenuta dalla
lunghezza d’onda misurata al massimo di riflessione del sensore FBG. La conversione
è calcolata inserendo i coefficienti della regressione polinomiale, nell’equazione 4.1.
Lo scarto massimo è di circa 0.3 .
Presentazione dei risultati
Una volta trovati i coefficienti della regressione con OriginLab, si sono inseriti nel
programma ENLIGHT dell’interrogatore ottico e si è proceduto a verificare la riproducibilità dei risultati.
Per tale verifica si è deciso di eseguire due serie consecutive di misure ai cinque valori
delle temperature programmate nella camera climatica, prima in ordine crescente
(da -20 a 40 ) e poi decrescente (da 40 a -20 ) per formare un ciclo. Ad ogni
temperatura fissata sono state eseguite n misure (tipicamente n = 100) e ne sono
stati calcolati i valori medi e le deviazioni standard, per ciascun sensore. Infine sono
state calcolate i valori medi delle temperature medie misurate dai diversi sensori e
la deviazione standard delle medie; abbiamo quindi valutato la compatibilità delle
misure con i valori misurati dal termometro campione.
Le formule statistiche utilizzate sono :
4 – Misure e calibrazioni in laboratorio
per le medie
28
P
x̄ =
i
xi
(4.2)
n
dove n è il numero di dati acquisiti ed xi il valore del singolo dato;
per le deviazioni standard della dispersione dei singoli valori
rP
2
i (xi − x̄)
σx =
n−1
(4.3)
dove n è il numero di misure effettuate ed x̄ la media dei valori.
Prendiamo in considerazione gli stessi sensori del paragrafo precedente e due
temperature, una della prima serie (TP T 100 = 9.4 ) ed una della seconda serie
(TP T 100 = 24.2 ).
Tabella 4.2. Valori medi e deviazioni standard delle temperature misurate dai
sensori FBG alla temperatura della sonda PT100 di 9.4
nella prima serie di
misure e di 24.2
nella seconda serie di misure.
S1532X5
T1512X8
S1526X8
Prima serie di misure (TP T 100 = 9.4 )
Media
9.403
9.359
9.428
Deviazione standard
0.027
0.024
0.080
Seconda serie di misure (TP T 100 = 24.2 )
Media
23.791 24.021 23.490
Deviazione standard
0.025
0.023
0.072
Nella tabella 4.2 possiamo notare che le deviazioni standard delle misure effettuate dai tre sensori sono piccole e non sempre le medie sono compatibili con la risposta
della sonda PT100. Infatti, l’intervallo di confidenza della misura con termometro
campione e gli intervalli di confidenza delle misure con FBG non si intersecano.
Inoltre si può vedere che le deviazioni standard più alte sono quelle per i sensori
situati al bordo del contenitore, che sono più soggetti al flusso d’aria delle ventole
della camera climatica.
Come si può notare dalla tabella 4.2 e dalla figura 4.7 l’andamento dei dati all’aumentare dal numero di essi tende a diventare una gaussiana centrata nella media
e con larghezza a metà altezza proporzionale alla deviazione standard. Inoltre, come
già detto in precedenza, bisogna fare particolare attenzione agli effetti strumentali,
per esempio il flusso d’aria della camera climatica per mantenere la temperatura
costante e l’uniformità della temperatura all’interno del contenitore. Infatti come si
4 – Misure e calibrazioni in laboratorio
29
nota nella figura 4.7 per il sensore S1526X8 i dati sono più sparsi.
Per valutare la bontà della calibrazione, andiamo a vedere se s’intersecano gli intervalli di confidenza del valore misurato dalla sonda PT100 e della media delle
temperature medie misurate dai singoli sensori su fibra ottica.
Tabella 4.3. Valor medio, e sua deviazione standard, delle temperature medie
misurate da tutti i 21 sensori delle fibre, con temperatura della sonda di riferimento
PT100 pari a 9.4
della prima serie di misure e a 24.2
della seconda serie di
misure.
TP T 100 = 9.4 (Serie 1)
Media delle medie
Deviazione standard
9.33
0.18
TP T 100 = 24.2 (Serie 2)
23.65
0.23
Dai dati in tabella 4.3, dalla figura 4.8 e ricordando che l’accuratezza della PT100
utilizzata è di 0.1 , si può notare che le medie e la sonda campione non sono sempre
compatibili.
Per il monitoraggio delle temperature del rivelatore SVD dell’esperimento Belle II,
si richiede di avere errori sistematici non superiori a 1 ed errori statistici minori
di 0.1 nella misura della temperatura.
Possiamo notare dalla figura 4.8 che le nostre calibrazioni rientrano in questi parametri. Infatti per la temperatura della sonda di 9.4 della prima serie di misure,
i valori delle temperature misurate dai sensori sono contenute in un intervallo di 1
e per la temperatura della sonda di 24.2 del secondo set di valori di misure
l’intervallo è di 0.8 .
4 – Misure e calibrazioni in laboratorio
30
Figura 4.6. Valore dei residui in temperatura. In ascissa la differenza tra i valori
delle lunghezze d’onda di massima riflessione λi misurati e il valore λ0 relativo ad
un singolo sensore FBG, in ordinata la differenza tra la temperatura misurata dal
sensore PT100 di riferimento e le temperature misurate ripetutamente dal sensore
FBG. In ordine dall’alto verso il basso i tre sensori S1532X5, T1512X8 e S1526X8.
4 – Misure e calibrazioni in laboratorio
31
Figura 4.7. Istogrammi delle temperature misurate dai tre sensori FBG alle due
temperature misurate dalla sonda PT100 di riferimento (9.4
sulla sinistra e 24.5
sulla destra). In ordine dall’alto verso il basso i tre sensori S1532X5, T1512X8
e S1526X8.
4 – Misure e calibrazioni in laboratorio
32
Figura 4.8. Istogrammi delle temperature medie misurate dai singoli sensori FBG.
A sinistra la temperatura della sonda di riferimento PT100 è pari a 9.4 ; a destra
la temperatura della sonda di riferimento è pari a 24.2 .
Capitolo 5
Conclusioni
Il rivelatore Silicon Vertex Detector (SVD) dell’esperimento Belle II presso il collisore SuperKEKB, attualmente in fase di costruzione, richiederà un complesso sistema
di raffreddamento per la sottrazione del calore dissipato dell’elettronica di lettura,
posizionate direttamente sui sensori al silicio che compongono il rivelatore.
Il controllo delle temperature in prossimità delle sorgenti di calore è richiesto con
errori statistici di circa 0.1 e sistematici non superiori a 1 , per l’intera durata
pluriennale dell’esperimento.
A tale scopo sono stati scelti sensori di temperatura a reticolo di Bragg su fibra ottica (FBG), che in linea di massima hanno le sensibilità richieste e offrono numerosi
vantaggi, tra i quali le ridotte dimensioni e l’assenza di rumore elettromagnetico
indotto.
Il presente lavoro di tesi si è concentrato sulla concezione e messa a punto di un
apparato sperimentale dedicato alla calibrazione dei sensori FBG e al confronto fra
fibre e sensori di diversi produttori. L’apparato include, oltre le fibre e all’elettronica di lettura, una camera climatica e un sensore di temperatura di riferimento,
costituito da una sonda PT100.
La procedura di calibrazione messa a punto include la determinazione di una funzione di conversione della lunghezza d’onda di massima riflessione misurata alla
temperatura, tramite regressione polinomiale.
Le misure effettuate permettono di stabilire che le richieste di precisione entro 0.1
e accuratezza entro 1 sono sodisfatte grazie alla procedura di calibrazione.
È possibile apportare delle modifiche all’apparato strumentale di calibrazione per
migliorare ulteriormente l’accuratezza della misura, per esempio :
Sostituire la sonda PT100 con un sensore a fibra ottica a reticolo di Bragg
con calibrazione di fabbrica. Il sensore campione in fibra ottica ha un tempo
di risposta ed una precisione simile ai sensori da calibrare. Un esempio è il
5 – Conclusioni
34
sensore os4210 [22] fornito dalla Micron Optics.
Ingrandire il contenitore delle fibre mantenendo spessori sottili delle pareti.
Infatti contenitori stretti possono limitare la libertà di espansione termica dei
sensori e quindi la lettura della lunghezza d’onda può essere falsata. Inoltre
se le pareti di alluminio sono troppo spesse il raggiungimento dell’uniformità
termica può risultare troppo lento.
Posizionare i sensori lontano alle ventole del flusso d’aria. Infatti per mantenere la temperatura della camera climatica stabile serve un ricircolo d’aria, il
quale potrebbe variare in modo significativo le temperature dei sensori vicini
alle ventole.
Bibliografia
[1] Belle II Technical Design Report, KEK Report 2010-1, October 2010;
[2] A. Bevan et al., editors. ”The Physics of the B Factories”. Eur. Phys. J. C
(2014) 74:3026;
[3] J. H. Christenson, J. W. Cronin, V. L. Fitch, and R. Turlay. Phys. Rev.
Lett. 13 (1964) 138; M. Kobayashi and T. Maskawa. ”CP Violation in the
Renormalizable Theory of Weak Interactions”. Prog. Theor. Phys. 49 (1973)
652-657;
[4] L. Bosisio, L. Lanceri, L. Vitale, ‘‘SVD Radiation and Environmental
Monitoring: General Requirements” , Belle2 note 2015;
[5] https : //it.wikipedia.org/wiki/F ibra ottica;
[6] Byoungho Lee, ‘‘Review of the present status of optical fiber sensors’’, Optical
Fiber Technology 9 (2003) 57-79;
[7] K.T.V. Grattan, Dr. Sun, ‘‘Fiber optic sensor technology: an overview”, Sensors
and Actuators 82 (2000) 40-61;
[8] R. Falciai, A. G. Mignani, A. Vannini, ‘‘Misure di concentrazione di soluzioni
tramite reticoli a passo lungo in fibra ottica’’ , www.elettromagnetismo.it;
[9] W.W. Morey, G. Meltz, W.H. Glenn, ‘‘Fiber optic Bragg grating sensors’’,
Proc.SPIE 1169, 98-107 (1989);
[10] http://www.ni.com/newsletter/51175/en;
[11] S. Chatrchyan et al. The CMS experiment at the CERN LHC. JINST, 3 (2008)
S08004;
[12] Crispin Doyle, ‘‘Fibre Bragg grating sensors. An introduction to Bragg gratings
and interrogation techniques’’, Smart Fibres Ltd. 2003,
http : //smartf ibres.com/Attachments/Smart%20F ibres%20T echnology
%20Introduction.pdf ;
[13] W.W. Morey, G. Meltz, W.H. Glenn, ‘‘Formation of Bragg gratings in optical fibers by a transverse holographic method”, Optics letters (1989) Vol.14,
Fascicolo 15 , 823-825;
[14] K.O. Hill, B. Malo, F. Bilodeau, D.C. Johnson, and J. Albert, ‘‘Bragg gratings
fabricated in monomode photosensitive optical fiber by UV exposure through
a phase mask’’ , Applied Physics Letters 62 (1993) 1035-1037;
5 – Bibliografia
36
[15] Zoltán Szillási, Salvatore Buontempo, Noémi Béni, Giovanni Breglio, Andrea
Cusano, Armando Laudati, Michele Giordano, Andrea Saccomanno, Dmitry Druzhkin, Andromachi Tsirou, ‘‘One year of FOS measurements in CMS
experiment at CERN’’ , Physics Procedia 37 (2012) 79-84;
[16] Carsten Niebuhr, Hua Ye, Reimer Stever, Karsten Gadow, Christian Camien,
DESY, ‘‘Thermal Mock-up Status’’ , 19th International Workshop on DEPFET
Detectors and Applications Kloster Seeon, 10-13th May 2015;
[17] http : //micronoptics.com/uploads/library/documents/datasheets/
instruments/M icron Optics sm225.pdf ;
[18] http : //www.micronoptics.com/uploads/documents/M anual.pdf ;
[19] http : //www.originlab.com/;
[20] http : //www.technicasa.com/www/wwwimg/U ploads/f iles/
T echnica%20sensing%20F BG − 140806.pdf ;
[21] http : //smartf ibres.com/docs/SmartF BG.pdf ;
[22] http : //www.micronoptics.com/uploads/library/documents/datasheets/
sensors/os4200 150223.pdf .