Lezione 18.
Motori elettrici DC
a magneti permanenti
1
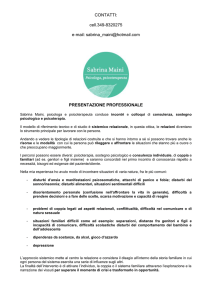
1. Struttura di un motore elettrico DC brushed
Cilindro mobile di materiale ferromagnetico detto
rotore;
sul rotore sono avvolte, in senso longitudinale, delle
spire collegate tra loro a formare un circuito chiuso
detto circuito d’armatura;
un magnete permanente, detto statore, che circonda
il rotore (lo statore può essere «avvolto»);
la zona libera tra statore e rotore è detta traferro;
le spire avvolte sul rotore fanno capo ad un
collettore (o commutatore) posto a contatto con
delle spazzole striscianti che mettono in contatto il
circuito d’armatura con l’alimentazione esterna.
2
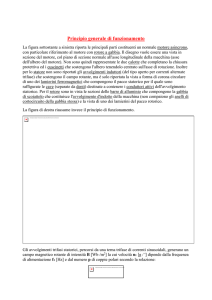
2. Commutatore a spazzole
spira in cc
L’alimentazione esterna applica
una tensione di alimentazione V.
In base all’impedenza di armatura,
circolerà una corrente I.
In ciascuna spira circolerà una
corrente Is pari alla metà della
corrente di alimentazione.
Una
spira
cortocircuito.
è
sempre
in
alimentazione esterna
F. Previdi - Controlli Automatici - Lez. 18
3
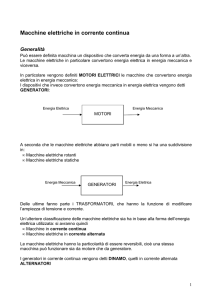
3. Costante di coppia
r
Il rotore è modellabile come un cilindro di lunghezza e di base circolare di raggio
in rotazione con velocità
.
Su di esso sono avvolte N spire in senso longitudinale (lungo le generatrici del
cilindro).
Esso è immerso in un campo magnetico radiale
, omogeneo lungo ciascuna
generatrice (e quindi dipendente dall’angolo ).
Ogni spira è percorsa dalla corrente .
4
Si ricordi che una spira rettangolare con lati di lunghezza ed ℎ, percorsa da
corrente , immersa in un campo magnetico di intensità , subisce una forza
di modulo =
e una coppia di modulo =
ℎ cos .
Si consideri ora un angolo
del rotore, in cui si trova un numero di spire
pari a
=
.
Su di esse agisce una forza di modulo
=
2
ed una coppia di modulo
=
=
2
Il modulo della coppia totale si otterrà integrando la coppia elementare tra
− e+
=2
=2
2
F. Previdi - Controlli Automatici - Lez. 18
5
Il flusso magnetico rotorico totale è
Φ=
Da cui si ottiene, ricordando che
=
=
Φ=
flusso magnetico
rotorico elementare
Φ
2
=
Quindi
=
=
si dice costante di coppia.
La costante di coppia è un termine di trasferimento elettromeccanico che lega
la coppia meccanica all’albero alla corrente elettrica circolante nel circuito
d’armatura.
La coppia meccanica generata è proporzionale alla corrente circolante
nel circuito di armatura.
6
4. Costante di forza controelettromotrice
La forza controelettromotrice (bemf) elementare
indotta in
di spire è la derivata del flusso magnetico rotorico elementare
=
=
2
Numero di spire
nell’angolo
=
:
2
derivata del flusso magnetico
rotorico elementare
La bemf complessiva indotta si otterrà integrando la bemf elementare tra
− e+
=
=
2
2
Il flusso magnetico rotorico totale è
Φ=
F. Previdi - Controlli Automatici - Lez. 18
7
da cui si ottiene
=
2
Φ=
Φ
2
=
Quindi
=
=
si dice costante di forza controelettromotrice.
La costante di forza controelettromotrice è un termine di trasferimento
elettromeccanico che lega la tensione indotta nel circuito d’armatura alla
velocità di rotazione del motore.
La forza controelettromotrice indotta nel circuito di armatura è
proporzionale alla velocità di rotazione del rotore.
Si osservi infine che
=
F. Previdi - Controlli Automatici - Lez. 18
8
5. Modello dinamico della parte elettrica di un
motore DC
Il modello della parte elettrica si basa sul circuito equivalente di armatura
bemf
Esso è descritto dalle seguenti equazioni
=
+
+
=
=
dove è la resistenza di armatura e è l’induttanza di armatura.
Nel dominio delle trasformate sarà descritto dalla seguente equazione
=
+
+
da cui
1
=
−
+
9
Lo schema a blocchi è quindi il seguente
−
+
1
+
Dal punto di vista sistemistico è un sistema del primo ordine con azione di controllo la
tensione
ed uscita la coppia meccanica
e su cui agisce un disturbo di carico
.
Si può intuire che più elevata sarà la coppia meccanica, maggiore sarà la velocità di
rotazione e di conseguenza maggiore sarà la bemf che va a far diminuire la tensione e di
conseguenza la coppia.
I motori DC tendono quindi spontaneamente ad una velocità di equilibrio.
F. Previdi - Controlli Automatici - Lez. 18
10
6. Caratteristica coppia-velocità
Si faccia ora un’analisi di equilibrio per il sistema dinamico che descrive la parte elettrica
= 0, quindi, in corrispondenza di un assegnato
del motore. All’equilibrio si ha che
valore per la tensione si ha
̅+
=
da cui si ha che
̅=
−
ed anche
−
̅=
=
coppia di spunto
=
−
La coppia di spunto è la
coppia a velocità nulla
Quando
= 0 si ha
=
velocità a vuoto
11