Caso applicativo 1
Impact prevention
su dissuasori mobili
Michele Ermidoro
06 Marzo 2017
Indice
1. Descrizione del progetto
2. Scouting tecnologico sensori prossimità
3. Magnetometro
1. Cosa è il Magnetometro
2. Perché può essere un sensore utile
4. Soluzione basata su Magnetometro
1.
2.
3.
4.
5.
6.
Analisi dei dati – macchina
Analisi dei dati – dissuasore
Ipotesi di lavoro
Algoritmo adattativo
Algoritmo soglia variabile
Risultati
5. Prossimi passi
Descrizione del progetto
Obbiettivo - 1
Obbiettivo del progetto è garantire che il dissuasore non impatti un veicolo durante
la fase di salita, tramite l’utilizzo di un sensore.
È stato necessario fare delle ipotesi di lavoro/funzionamento:
Scenario 1:
Il dissuasore inizia la sua salita quando è ancora visibile dal guidatore del veicolo
𝒗𝒅𝒊𝒔𝒔
𝒗𝒄𝒂𝒓
Il dissuasore NON deve fermarsi
Obbiettivo - 2
Obbiettivo del progetto è garantire che il dissuasore non impatti un veicolo durante
la fase di salita, tramite l’utilizzo di un sensore.
È stato necessario fare delle ipotesi di lavoro/funzionamento:
Scenario 2:
Il dissuasore inizia la sua salita quando il veicolo è sopra di esso
𝒗𝒅𝒊𝒔𝒔
Il dissuasore NON DEVE alzarsi
𝒗𝒄𝒂𝒓
Obbiettivo - 3
Obbiettivo del progetto è garantire che il dissuasore non impatti un veicolo durante
la fase di salita, tramite l’utilizzo di un sensore.
È stato necessario fare delle ipotesi di lavoro/funzionamento:
Scenario 3:
Il dissuasore inizia la sua salita quando è fuori dal campo visivo dal guidatore del
veicolo
𝒗𝒄𝒂𝒓
𝒗𝒅𝒊𝒔𝒔
WORST
CASE
Il dissuasore DEVE fermarsi
Possibili tecnologie utili
Indice
• Sensori di Prossimità:
1. Sensori Infrarossi
2. Sensori Ultrasuoni
3. Sensori Induttivi
4. Sensori Capacitivi
5. Sensori Magnetici
• Sensori di Prossimità per applicazioni Automotive:
1. Sensori di Parcheggio
2. Sensori Vehicle Loop Detector (VLD)
• Considerazioni Finali
Sensori di Prossimità
Sensori Infrarossi
Sensori ad Infrarossi - Funzionamento
• I sensori fotoelettrici sono basati sul rilevamento di un cambiamento nella
quantità di luce riflessa o bloccata dall’oggetto da rilevare (target).
• Hanno quattro componenti fondamentali:
– 1. sorgente luminosa: Solitamente è un diodo ad emissione di
luce (LED) a specifiche lunghezze d'onda.
– 2. rilevatore di luce: Un fotodiodo o fototransistore. Varia la
corrente condotta al variare della quantità di luce rilevata.
– 3. lenti: Vengono usate per restringere l’area del cono di luce
emesso (rilevato).
– 4. dispositivo di commutazione di uscita: Quando viene
rilevato un cambiamento sufficiente del livello di luce, l’uscita
logica del sensore cambia.
Sensori ad Infrarossi - Utilizzo
Tipologia
Descrizione
Vantaggi
Precauzioni
A barriera
Sorgente e ricevitore disposti l’uno di
fronte all’altro.
Ampi campi di rilevamento.
Allineamento corretto.
A riflessione
Contiene sia sorgente che ricevitore.
Una sola unità da installare.
Distanze misurabili più
brevi.
A tasteggio
Non ha un riflettore, cerca sempre un
oggetto: il raggio riflesso viene
disperso in tutte le direzioni, solo una
piccola parte torna al sensore.
Facilità d’installazione.
Campi di rilevamento in
funzione dell’oggetto.
13
Sensori ad Infrarossi – Soluzioni su Mercato
Soluzioni trovate sul mercato:
Nome
Azienda
Dimensione
Distanza
rilevamento
Prezzo
42KL MiniSight
ROCKWELL
40x30x12mm
Max 5m
65-70€
42EF RightSight
ROCKWELL
27x32x34mm
Max 5m
25-50€
42CA
ROCKWELL
80x64mm (cilindrici)
Max 6m
40€
Serie S10
DATALOGIC
65x21mm (cilindrici)
Max 4m
N/A
Serie S40
DATALOGIC
20x24x12mm
Max 6m
N/A
Osservazioni:
1. La distanza di rilevamento massima e il prezzo dipendono dalla modalità con
cui vengono utilizzati.
2. Hanno un campo visivo approssimabile ad un fascio: possono rilevare solo
oggetti posti frontalmente.
3. Prestazione dipendente dalle condizioni ambientali.
Sensori di Prossimità
Sensori Ultrasuoni
Sensori ad Ultrasuoni - Funzionamento
• I sensori di prossimità ad ultrasuoni funzionano sul principio del sonar: emettono
impulsi sonori ultrasonici, e rilevano un'eventuale eco di ritorno generato dalla
presenza di un oggetto all'interno della portata nominale.
• Presentano dei significativi vantaggi:
– possono avere portate nominali molto elevate (fino a 10 m);
– sono immuni ai disturbi elettromagnetici;
– possono rilevare oggetti di qualsiasi materiale (eccetto materiali fonoassorbenti).
Sensori ad Ultrasuoni - Utilizzo
Esistono 2 modalità di funzionamento fondamentali:
Tipologia
Descrizione
In opposizione
Un sensore emette i suoni e un altro li riceve.
A tasteggio
Lo stesso sensore emette i suoni e poi sente l'eco che
rimbalza su un oggetto.
In opposizione
A tasteggio
• I sensori ad ultrasuoni hanno una zona cieca situata in corrispondenza della
superficie sensibile.
• Esistono certe caratteristiche dei target che devono essere tenute in
considerazione: la forma, il materiale, la temperatura, le dimensioni e il
posizionamento. Materiali morbidi come stoffa o spuma di gomma sono difficili
da rilevare.
Sensori ad Ultrasuoni – Soluzioni su Mercato
Soluzioni trovate sul mercato:
Nome
Azienda
Dimensione
Distanza
rilevamento
Prezzo
Serie 873P Programmabile
ROCKWELL
18x92mm (cilindrico)
Max 2m
N/A
Serie 873P
ROCKWELL
18x92mm (cilindrico)
Max 1m
N/A
MB7367
MaxBotix
20x30mm
Max 5m
89€
Acquistato!
• Osservazioni:
1. La distanza di rilevamento e il prezzo dipendono dalla modalità con cui vengono
utilizzati.
2. Il campo visivo non è un fascio come nel caso degli infrarossi.
3. Il sensore acquistato ha “virtualmente” zona cieca nulla: non fornisce un valore di
distanza preciso ma sa dire se c’è o no un oggetto [al di sotto dei 30 cm].
4. Il sensore acquistato ha dimensioni ridotte rispetto alle altre soluzioni elencate.
Sensori di Prossimità
Sensori Induttivi
Sensori Induttivi - Funzionamento
• I sensori induttivi sono costituiti da una
bobina in cui viene fatta passare una corrente.
Questa crea un campo magnetico che si
chiude nel percorso più breve.
• Se un oggetto si avvicina al sensore, le linee
magnetiche vengono alterate e quindi anche
la riluttanza che caratterizza il circuito
magnetico.
• Questo fenomeno viene rilevato dal circuito di
attivazione (Trigger di Schmitt) che commuta
l’uscita del sensore.
Sensori Induttivi - Utilizzo
• Questa tipologia di sensori prevede 2 diverse caratteristiche costruttive:
Tipologia
Descrizione
Con Schermatura
Consente di direzionare il raggio d’azione verso una specifica
direzione. Questo andrebbe a diminuire l’ampiezza di
rilevazione, ma la distanza sarebbe maggiore.
Senza Schermatura
Consente di avere una maggiore ampiezza del raggio di azione,
sacrificando così la distanza massima rilevabile.
• Possono rilevare solamente oggetti metallici.
Sensori Induttivi – Soluzioni su Mercato
Soluzioni trovate sul mercato:
Nome
Azienda
Dimensione
Distanza
rilevamento
Prezzo
DW-AS-513-M30-002
CONTRINEX
73x32x32mm
40mm
63,00€
SIQ 80 - CE50 PNP/NPN NO
GETEC
80x80x50mm
60mm
30,00€
NI75U-Q80-AP6X2-H1141
TRUCK
92x80x40 mm
75mm
133,55€
NCN100-F23-E2-V1
PEPPERL FUCHS
177x153x70mm
100mm
469,00€
Osservazioni:
1. Possono rilevare solamente oggetti metallici
2. Distanza di rilevamento massima di 10cm.
3. Il loro campo visivo è approssimabile ad un fascio solo nel caso di sensori con
schermatura: senza schermatura l’angolo di visione è più ampio a discapito della
distanza massima misurabile.
Sensori di Prossimità
Sensori Capacitivi
Sensori Capacitivi - Funzionamento
• Si basano sulla variazione di capacità. Il sensore stesso rappresenta un condensatore: la
sonda è una lamina di questo condensatore, la seconda lamina invece è l’oggetto da
rilevare.
• La misura di distanza è eseguita ancora una volta da un circuito oscillatore: all’avvicinarsi
dell’oggetto la capacità varia e con essa anche la frequenza di oscillazione.
Sensori Capacitivi - Utilizzo
• A differenza dei sensori induttivi i quali possono rilevare solo materiali ferromagnetici, i
sensori capacitivi sono in grado di rilevare anche materiali come il legno o la plastica
poiché anch’essi comportano una variazione della capacità.
• Sono ampiamente utilizzati come controllori di livello minimo e massimo di liquidi,
prodotti in polvere, granulari ecc. oppure per conteggio o rilevazione di pezzi metallici e
non metallici.
• La distanza di intervento è in funzione del materiale e delle dimensioni dell’oggetto da
controllare.
Sensori Capacitivi – Soluzioni su Mercato
Soluzioni trovate su mercato:
Nome
Azienda
Dimensione
Distanza
rilevamento
Prezzo
CJ40-FP-A2-P1
PEPPERL-FUCHS
80x65x40mm
40mm
169,95€
SC30P - CE25
ACCULEX
105x15x15mm
25mm
147,45€
EC3025N(P)PAPL
CARLO GAVAZZI
28x28x63mm
25mm
219,00€
• Osservazioni:
1. Hanno distanza di rilevamento massima di qualche cm, più brevi rispetto agli
induttivi.
2. Hanno un campo visivo approssimabile ad un fascio: possono rilevare solo oggetti
posti frontalmente.
3. Rilevano tutte le tipologie di materiale.
Sensori di Prossimità
Sensori Magnetici
Sensori Magnetici - Funzionamento
• I sensori di prossimità magnetici sono strumenti in grado di rilevare il campo magnetico
generato da un oggetto munito di magnete (l’oggetto deve essere magnetico).
• La loro commutazione è basata sull’effetto Hall oppure sul contatto Reed:
Tipologia
Descrizione
Effetto Hall
Si forma una differenza di potenziale dovuta alla presenza di un
campo magnetico.
Contatto Reed
Sono due lamine di materiale magnetico che a causa del campo
rilevato si attraggono una verso l’altra.
Sensori Magnetici – Contatto Reed
• Sensore costituito da 2 lamine di materiale magnetico, le quali sono sensibili ai campi
magnetici e sono racchiuse in un gas inerte. Quando il campo magnetico supera la
resistenza elastica delle lamine, esse si flettono una verso l’altra creando un contatto
elettrico.
• Vantaggi Principali:
– Protetti da polvere ed ossidazione
– Maggiore durata nel tempo
– Ridotta caduta di tensione rispetto ai 2 sensori precedentemente analizzati
– Dimensioni più ridotte
Sensori Magnetici – Soluzioni su Mercato
Soluzioni trovate sul mercato:
Nome
Azienda
Dimensione
Distanza
rilevamento
Prezzo
MQ10-60APS-KUO
SICK OPTICK
ELECTRONICS
37x10x10mm
60mm
43,01€
MB60-12GM50-E2
PEPPERL-FUCHS
60x10x10mm
60mm
109,52€
BES IKU-215.38-G-S4
BALLUFF
150x68x280mm
120mm
130€
BCS M30TTH2POC30G-AT02
BALLUFF
72x25x25mm
30mm
233€
• Osservazioni:
1. Possono rilevare solamente oggetti magnetici.
2. Hanno distanza di rilevamento massima di qualche cm.
Sensori di Prossimità per applicazioni
Automotive
Sensori di Parcheggio
Sensori di Parcheggio - Funzionamento
• I sensori di parcheggio sono sensori di prossimità per i
veicoli stradali progettati per avvisare il conducente
della presenza di ostacoli durante il parcheggio. Questi
possono essere sia elettromagnetici che ad ultrasuoni.
• Quelli ad ultrasuoni funzionano esattamente come i
sensori ad ultrasuoni descritti precedentemente.
• Quelli elettromagnetici sono essenzialmente dei cavi da montare lungo la zona da
proteggere. Impiegano onde elettromagnetiche a bassa energia e sono in grado di rilevare
l’avvicinamento di un oggetto al veicolo.
• Hanno distanza di rilevazione ridotta rispetto ai sensori ad ultrasuoni, ma hanno il
vantaggio di proteggere il veicolo su tutta la lunghezza e di rilevare qualsiasi tipo di
ostacolo.
Sensori di Parcheggio - Utilizzo
• In base al tipo di funzionamento bisogna tenere conto di alcune precauzioni:
Tipologia
Precauzioni
Ad Ultrasuoni
La rilevazione è influenzata da forma dell’ostacolo, dalla loro
posizione e altezza, dal tipo di superficie, dall’angolo di
riflessione e dalle condizioni del tempo.
Elettromagnetici
Grazie alla tecnologia a campo elettromagnetico permette di
parcheggiare in spazi molto ristretti.
Sensori di Parcheggio – Soluzioni su Mercato
Soluzioni trovate sul mercato:
Nome
Azienda
Dimensione
Distanza
rilevamento
SPBS5 (ultrasuoni)
VALLEMAN
98x72x25 (schermo LCD) Max 2m
60€
EPS-DUAL 2.0 (elettromagn.)
PROXEL
Cavo
80€
Max 80cm
Acquistato!
• Osservazioni:
1. Ampio angolo di visione.
2. Prezzo contenuto.
3. Poco “invasivi”.
4. Acquistato per ulteriori approfondimenti sul suo funzionamento.
Prezzo
Sensori di Prossimità per applicazioni
Automotive
Sensori Vehicle Loop Detector
(VLD)
Sensori VLD - Funzionamento
• Vehicle Loop Detector è la tecnica più utilizzata e sicura per la rilevazione del passaggio di
veicoli in una determinata zona. Il suo principio di funzionamento si basa sul sensore
induttivo e quindi sulla variazione di riluttanza.
• Quando un veicolo è immerso nel campo magnetico le spire cambiano il loro valore
induttivo, generando variazioni sulla frequenza di oscillazione del circuito.
Sensori VLD - Utilizzo
• Per rendere sicura la rilevazione bisogna creare una campo magnetico sufficientemente
forte, si seguono queste regole per la geometria.
– Forma: solitamente rettangolare. Dovrà presentare una lunghezza e una larghezza leggermente
inferiore rispetto alla massima dimensione del veicolo che vi transiti.
– A seconda della circonferenza da ricoprire si segue questa tabella:
• La larghezza minima non deve essere inferiore a 0.8 m.
• Proporzioni (L:W) da 1:1 fino a max. 4:1.
Sensori VLD – Soluzioni su Mercato
• Il costo in sé dei componenti non è elevato (intorno ai 75$ per una soluzione semplice),
tuttavia resta il problema del costo del posizionamento di tutto il materiale.
Nome
Azienda
DSP 50 DIABLO CONTROLS
Dimensione
Distanza
rilevamento
Prezzo
Cavo: 30 m
ECU: 36x74x85 mm
Uscita Logica
205,00€
• Osservazioni:
1. Il costo complessivo elevato.
2. Come i sensori induttivi, possono rilevare solamente oggetti metallici.
3. Dato le grandi dimensioni delle spire, sono particolarmente adatti a oggetti di grandi
dimensioni (veicoli o mezzi simili).
4. Soluzione “invasiva”.
Considerazioni Finali
Considerazioni Finali
Dallo scouting tecnologico è emerso che :
1. La maggior parte dei sensori di proximity presentano range di misura troppo basso
per la applicazione.
2. La maggior parte dei sensori di prossimità non è in grado di rilevare oggetti in
avvicinamento, ovvero possono rilevare oggetti posizionati frontalmente. Nell’ipotesi
di montaggio su dissuasore quindi sarebbe controllata solo l’area superiore ad esso.
3. La soluzione VLD è da considerarsi troppo invadente per l’applicazione
4. L’accoppiata di un sensore ad ultrasuoni e di un sensore di parcheggio
elettromagnetico potrebbe permetterci di avere una visione completa della
situazione.
PROPOSTA INNOVATIVA
Magnetometro
Magnetometro
Magnetometro
• Sensore di misura campo magnetico terrestre.
• Sensore MEMS
• Sensore triassiale
Condizioni ideali:
il sensore misura solo il campo magnetico terrestre
perfetto per uso come «bussola digitale»
Perdita idealità
il magnetometro soffre di due tipi di disturbi
- Soft Iron: provocati da oggetti ferromagnetici che deviano il campo
magnetico terrestre;
- Hard Iron: provocati da oggetti ferromagnetici che generano un campo
magnetico di disturbo;
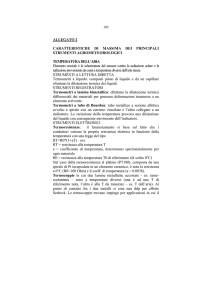
Magnetometro - Utilità
Un veicolo è tipicamente composto da materiali che provocano disturbi sia di tipo
Hard (batterie, alternatore) che Soft (carrozzeria, chassis).
𝒗𝒄𝒂𝒓
Accelerometro triassiale
Magnetometro triassiale
• I due sensori sono montati solidalmente su un asse di legno
• L’accelerometro triggera il passaggio delle ruote anteriori e posteriori, ci
permette di:
– Conoscere posizione veicolo
– Stimare la velocità media di passaggio
Magnetometro - Utilità
Un veicolo è tipicamente composto da materiali che provocano disturbi sia di tipo
Hard (batterie, alternatore) che Soft (carrozzeria, chassis).
Il passaggio della macchina
provoca una variazione notevole
sulla misura del magnetometro
Il segnale magnetometrico è
variato dalla macchina prima
del suo arrivo
Soluzione basata su magnetometro
Algoritmo - Introduzione
Modulo campo
magnetico
•
•
•
•
Sfruttando le misure del magnetometro possiamo identificare la macchina
Le misure sono ripetibili? Da che parametri dipendono?
Cosa succede al segnale magnetometrico se montato sul dissuasore in azione?
Come possiamo simulare la situazione reale?
Quale è il metodo che garantisce migliori tempi di identificazione della macchina?
Analisi Dati – Ipotesi di lavoro
Non avendo a disposizione un dissuasore interrato si è lavorato usando il principio di
sovrapposizione degli effetti:
FIRMA
MACCHINA
SEGNALE «IPOTETICO»
Approssimazione del disturbo
creato da una macchina su un
dissuasore interrato
SOVRAPPOSIZIONE
EFFETTI
FIRMA
DISSUASORE
Il momento in cui arriva la
macchina influenza la
creazione del segnale
disturbato
Analisi Dati – disturbo veicolo
La firma magnetica della «macchina» è stato valutato per 4 diverse tipologie di auto
a diverse velocità.
I test sono stati effettuati montando magnetometro su un asse di legno,
completamente scollegato dal dissuasore.
Veicoli utilizzati:
Velocità di passaggio:
Dai 3Km/h ai 25 Km/h
Analisi Dati – Disturbo Golf
Le prove sono sincronizzate sul
passaggio della ruota sull’asse di legno
• Al variare della velocità la firma magnetica
cambia
• Dopo il passaggio della macchina il segnale
torna alla sua baseline (no isteresi)
• Il segnale è una «firma magnetica» della
macchina
4 Km/h
T stretched
Variaz. picco
16 Km/h
27 Km/h
Analisi Dati – Disturbo Golf
• Al variare della velocità la firma magnetica
cambia
• Dopo il passaggio della macchina il segnale
torna alla sua baseline (no isteresi)
• Il segnale è una «firma magnetica» della
macchina
• La firma magnetica è strettamente legata alla
forma della macchina
• La firma magnetica è solamente funzione
della posizione della macchina sopra il
sensore
Marcia Avanti
Marcia Indietro
Analisi Dati – Comparazione veicoli
2 Km/h
3 Km/h
3 Km/h
6 Km/h
• Ogni macchina crea una firma che la caratterizza
• La firma non è spiegabile fisicamente, ma
dipende sicuramente dalla forma e dai materiali
della macchina
Analisi Dati Veicolo - Risultati
• La variazione del campo magnetico generata da un veicolo è strettamente legato
alla presenza ed alla posizione dello stesso sopra il sensore
• Il passaggio della macchina non genera effetti di persistenza magnetica
• La firma magnetica ha una forma diversa per ogni tipologia di veicolo
• Tralasciando forma e ripetibilità, la variazione di campo magnetico introdotta dal
passaggio di una macchina su un magnetometro è notevole:
– Media campo magnetico terrestre:
– Picchi variazione veicolo:
0.47 Gauss
1.1÷1.4 Gauss
Analisi Dati - Dissuasore
La seconda parte di analisi dei dati prevede analisi dei dati sul dissuasore.
L’analisi prevede la verifica della variazione magnetica creata dai materiali
ferromagnetici e dal motore del dissuasore
magnetometro
posizione
Sensore Laser
accelerometro
Magnetometro
Accelerometro
Analisi Dati - Dissuasore
La seconda parte di analisi dei dati prevede analisi dei dati sul dissuasore.
L’analisi prevede la verifica della variazione magnetica creata dai materiali
ferromagnetici e dal motore del dissuasore
Simmetrico tra
salita e discesa
Dipendente da
posizione dissuasore
Analisi Dati – Dissuasore ripetibilità
4 diversi test
Test effettuati nelle stesse
condizioni.
La differenza nella discesa sta
nel fatto che il passaggio tra le
diverse fasi era manuale.
Le prove risultano essere molto
ripetibili tra di loro, sia come
firma magnetica che come
posizione.
Analisi Dissuasore – Risultati
• La firma magnetica del dissuasore è ripetibile
• La variazione del campo magnetico dipende dalla posizione del dissuasore:
– Se abbassato è molto vicino alla struttura metallica
– Nel momento in cui inizia la salita il motore genera un maggiore disturbo magnetico
(picco)
– Pian piano che si allontana dal motore il disturbo magnetico si attenua
• Il risultato precedente è confermato dalla simmetricità della firma del dissuasore
Algoritmo identificazione
Algoritmo
L’algoritmo è attivato nel momento in cui il dissuasore richiede la salita
Richiesta salita
Esegui fino
h < 20cm
Algoritmo
statico
Rilevato
veicolo
Algoritmo
dinamico
Rilevato
veicolo
Algoritmo statico
Algoritmo statico
L’algoritmo statico prevede il semplice controllo della presenza della macchina
analizzando il segnale magnetico
• Sulla base della statistica del
segnale si crea una banda di
sicurezza
• Ogni volta che il segnale esce da
queste bande il trigger presenza
si attiva
• Il trigger si disattiva quando il
segnale rientra nelle bande per
0.5 s
Magn. Ipotizzato
Magn. Baseline
Banda sicurezza
Trigger presenza
PARAMETRI ALGORTIMO:
• t rientro
• Ampiezza bande (discusso
successivamente)
NB: questo algoritmo funziona solo nell’ipotesi di
dissuasore completamente abbassato e fermo
Algoritmo statico
NB: questo algoritmo funziona solo nell’ipotesi di
dissuasore completamente abbassato e fermo
La variazione di campo magnetico introdotto dal movimento del dissuasore
viene visto dall’algoritmo statico come la presenza di un veicolo
Algoritmo dinamico
Introduzione
Questa tipologia di algoritmo lavora in una precisa fascia di funzionamento del
dissuasore, le condizioni sono:
• Il dissuasore ha avuto il via libera dall’algoritmo statico ed ha iniziato la salita
• Il dissuasore non ha ancora raggiunto i 20 cm di altezza
– Perché 20 cm?
15’’
20 cm
Le due condizioni precedenti caratterizzano il worst case, in quanto due variazioni
magnetiche provenienti da sorgenti diverse si sommano sul sensore
Due soluzioni vengono proposte
Soluzione 1: soglia dinamica
IPOTESI: il dissuasore mantiene la stessa curva caratteristica
IDEA: sulla base di questa forma viene creata una soglia adattativa
• Si prendono un numero > 5 di prove;
• Si analizza media e varianza di questo
segnale; sulla base di questi segnali
viene creata una banda di sicurezza:
Ampiezza: 5 ∙ 𝜎
Area: 𝜇 ± 5 ∙ 𝜎
• L’uscita da questa banda comporta
l’identificazione del veicolo e lo stop del
dissuasore
Magnetometro
Soglia sicurezza
Trigger
Risultati
Introduzione
Per poter valutare effettivamente il funzionamento, devono essere valutate
entrambe le condizioni di lavoro
Algoritmo
statico
Algoritmo
dinamico
Interviene quando il
dissuasore è fermo
Interviene quando il
dissuasore ha iniziato la
salita e finchè raggiunge I
20 cm
Risultati – algoritmo statico
Magnetometro
Soglia sicurezza
Segnale «base»
• La firma della macchina è
strettamente legato alla sua
posizione relativa al
magnetometro.
• La firma inizia prima che la
macchina sia effettivamente sopra
il sensore
Ipotizzando la macchina nelle
vicinanze del dissuasore, otteniamo la
figura a lato.
Richiesta di salita dissuasore con
distanza centro
macchina/dissuasore pari a -1m
1m
Risultati – algoritmo statico
Magnetometro
Soglia sicurezza
Segnale «base»
• La firma della macchina è
strettamente legato alla sua
posizione relativa al
magnetometro.
• La firma inizia prima che la
macchina sia effettivamente sopra
il sensore
Ipotizzando la macchina nelle
vicinanze del dissuasore, otteniamo la
figura a lato.
La macchina risulta essere sopra il
dissuasore solo nel box arancione.
L’algoritmo
impedisce la
Richiesta di salita
dissuasore statico
con
salita del dissuasore in presenza
distanza centro
macchina/dissuasore paridia 1.5m
un veicolo*
1.5m
Risultati – algoritmo statico
L’algoritmo statico fallisce in
alcune posizioni della macchina
Risultati – algoritmo dinamico
L’analisi prestazionale di questo algoritmo si basa sulle ipotesi di lavoro descritte
precedentemente.
• Ipotizzeremo l’assenza dell’algoritmo statico per poter valutare completamente il
funzionamento dell’algoritmo dinamico
• Ipotizzeremo la macchina a velocità costante in avvicinamento/allontanamento dal
dissuasore
• Ipotizzeremo la richiesta di salita del dissuasore a diverse distanze centro macchina dissuasore
Distanza centro macchina-dissuasore
-2
0
2
-2m
0m
2m
Risultati – algoritmo soglia dinamica
4 – Le due barre tratteggiate indicano l’area
in cui la macchina è sopra il dissuasore
3 – Si verifica la posizione della
macchina quando il fault è identificato
2 – Viene plottata l’altezza del
dissuasore nel momento in cui
l’algoritmo identifica il fault
1 – Il dissuasore inizia a salire. Il centro
della macchina si trova a -3m dal dissuasore
e la macchina si muove a v costante
Risultati – algoritmo soglia dinamica
4 – La macchina è sopra, ma il dissuasore è
fermato in tempo
3 – all’identificazione la distanza
interasse dissuasore è di – 50 cm
2 – h stop ≈ 5 cm
1 – -3 m, velocità 17 Km/h
Risultati – algoritmo soglia dinamica
Risultati – algoritmo soglia dinamica
V crescenti
Si può supporre che a bassissime
velocità ci sia più attenzione alla
salita del dissuasore
Risultati – algoritmo soglia dinamica
• L’algoritmo dinamico a soglia variabile è in grado di identificare il veicolo.
• Il funzionamento dà I risultati migliori tra I -3 m e i 3 m di distanza centro macchinadissuasore.
– Ipotizzando una lunghezza media di 4 metri l’area di lavoro è da 1 metro prima a 1 metro dopo il
dissuasore
– Si può supporre che prima dei 4m il guidatore abbia tutta l’abilità di vedere il dissuasore salire
• Nell’area tra I -3 e i -4 m il funzionamento è garantito per alte velocità (> 5 Km/h)
• L’algoritmo dinamico copre anche tutte le condizioni non coperte dall’algoritmo statico
Risultati - Conclusioni
• L’algoritmo sviluppato, tramite l’utilizzo di una macchina a stati, garantisce
l’identificazione del veicolo in tutti i casi di rischio;
• Nelle condizioni critiche, l’altezza del dissuasore è mantenuta sempre al di sotto dei 20 cm;
• Se il dissuasore supera i 20 cm l’algoritmo non lavora più. Questa condizione è raggiunta
nel caso in cui il dissuasore inizi la salita quando il guidatore può ancora vederlo.
• Le prestazioni sono indifferenti dal tipo della macchina
Richiamando gli scenari creati:
𝒗𝒅𝒊𝒔𝒔
𝒗𝒄𝒂𝒓
Prosegue la salita
d min 1.5 m
𝒅
𝒗𝒅𝒊𝒔𝒔
Non sale*
𝒗𝒄𝒂𝒓
𝒗𝒄𝒂𝒓
𝒗𝒅𝒊𝒔𝒔
Rimane sotto i 20 cm