UNIVERSITA’ DEGLI STUDI DI NAPOLI
“FEDERICO II”
FACOLTA’ DI SCIENZE M.M. F.F. N.N.
Laurea magistrale in Astrofisica e Scienze dello Spazio
Sensore ottico per il ground testing di
LISA Pathfinder
Optical sensor for LISA Pathfinder ground testing
A.A. 2009/2010
Relatori:
Candidata:
Prof. Leopoldo Milano
Dott. Luciano Di Fiore
Giuliana Russano
Matr.: 242/5
Mentre nessun esperimento positivo può darmi
definitivamente ragione, un solo esperimento
negativo può sempre darmi torto.
Albert Einstein
Lo spazio-tempo dice alla materia come muoversi;
la materia dice allo spazio-tempo come distorcersi.
J. Wheeler
La gravità non è una forza,
ma la manifestazione
dello spazio-tempo.
A. Einstein
2
Sommario
INTRODUZIONE .................................................................................................................................................... 6
1 LE ONDE GRAVITAZIONALI ............................................................................................................................ 12
1.1
Fondamenti di relatività generale .............................................................................................. 13
1.2
La propagazione delle onde gravitazionali ................................................................................. 15
1.3
Effetto fisico del passaggio delle onde gravitazionali................................................................. 17
1.4
Generazione delle onde gravitazionali ....................................................................................... 18
1.5
Sorgenti di onde gravitazionali ................................................................................................... 19
1.5.1
Sorgenti impulsive .............................................................................................................. 21
1.5.2
Sorgenti periodiche ............................................................................................................ 21
1.5.3
Sorgenti stocastiche ........................................................................................................... 23
2 I RIVELATORI DI ONDE GRAVITAZIONALI....................................................................................................... 24
2.1
I rivelatori interferometrici ......................................................................................................... 25
2.2
Le sorgenti di rumore ................................................................................................................. 30
2.2.1
Il rumore termico................................................................................................................ 30
2.2.2
Il rumore sismico ................................................................................................................ 31
2.2.3
Shot noise ........................................................................................................................... 32
2.3
La sensibilità ............................................................................................................................... 32
3 L’ANTENNA SPAZIALE LISA ............................................................................................................................ 35
3.1
Una panoramica su LISA ............................................................................................................. 36
3.2
Sorgenti di segnale per LISA ....................................................................................................... 41
3.2.1
Sorgenti stocastiche ........................................................................................................... 42
3.2.2
Binarie galattiche ................................................................................................................ 42
3.2.3
Chirping sources ................................................................................................................. 43
3.3
Sorgenti di rumore e sensibilità di LISA ...................................................................................... 45
3.3.1
Shot noise ........................................................................................................................... 46
3.3.2
Rumori di accelerazione ..................................................................................................... 47
3.4
Time Delay Interferometry ......................................................................................................... 49
3.5
LISA Pathfinder ........................................................................................................................... 51
4 IL GRAVITATIONAL REFERENCE SENSOR ....................................................................................................... 54
4.1
Il sistema di controllo Drag-Free ................................................................................................ 54
4.2
Il sensore capacitivo ................................................................................................................... 56
4.3
Il pendolo di torsione a quattro masse ...................................................................................... 60
4.3.1
Le equazioni del pendolo .................................................................................................... 63
4.3.2
Il Flight Model replica ......................................................................................................... 65
4.3.3
Lo Stiffness Compensator ................................................................................................... 65
4.3.4
L’allineamento dei sensori .................................................................................................. 66
4.3.5
L’autocollimatore................................................................................................................ 67
4.4
Rumori in forza ........................................................................................................................... 67
4.4.1
Rumore relativo al circuito di lettura ................................................................................. 67
4.4.2
Le interazioni elettrostatiche.............................................................................................. 68
4.4.3
Disturbi dovuti ai gradienti termici ..................................................................................... 69
5 IL SENSORE OTTICO MRORO ......................................................................................................................... 70
5.1
Il set-up del sensore MRORO...................................................................................................... 73
5.2
Il modello geometrico del sensore ............................................................................................. 75
5.2.1
Traslazione .......................................................................................................................... 75
5.2.2
Rotazione ............................................................................................................................ 76
5.3
Il fotodiodo a quadrante............................................................................................................. 78
5.3.1
Acquisizione e segnali ......................................................................................................... 80
5.3.2
Sorgenti di rumore .............................................................................................................. 80
5.3.3
Caratterizzazione del rumore elettronico del fotodiodo.................................................... 82
5.4
Back-action del sensore MRORO ................................................................................................ 88
5.5
L’allineamento del sensore MRORO........................................................................................... 88
5.6
La calibrazione ............................................................................................................................ 89
5.7
Le misure sul pendolo di torsione .............................................................................................. 92
5.7.1
La calibrazione dei segnali .................................................................................................. 92
5.7.2
Risultati delle misure di ottobre 2009 ................................................................................ 95
4
5.8
Ultime misure e confronti .......................................................................................................... 97
6 CONCLUSIONI .............................................................................................................................................. 102
APPENDICE A Stima della densità di potenza spettrale .................................................................................. 104
Bibliografia ....................................................................................................................................................... 106
RINGRAZIAMENTI ............................................................................................................................................. 109
5
Introduzione
INTRODUZIONE
La rivelazione delle onde gravitazionali è uno degli obiettivi più interessanti della ricerca
scientifica internazionale moderna che porterà verso un nuovo modo di guardare l’Universo, attraverso la fondazione della cosiddetta astronomia delle onde gravitazionali. Studiare questa nuova forma di energia permetterà di ottenere ulteriori informazioni sul comportamento, sulla struttura e la storia dell’Universo fisico e sulla fisica stessa. Inoltre comporterà l’apertura di un nuovo e
più potente metodo di indagine circa gli elementi costitutivi dello spazio-tempo, dal Big Bang ai
buchi neri.
La storia delle onde gravitazionali inizia nei primi due decenni del XX secolo, quando il fisico tedesco Albert Einstein pubblicò la sua Teoria della Relatività Generale, introducendo un modo del tutto nuovo di pensare la relazione fra materia, spazio e tempo. Secondo la Relatività Generale, la
massa agisce sullo spazio-tempo, imponendogli come curvarsi. Concentrazioni compatte di materia e di energia modificano la struttura più profonda dello spazio-tempo, deformandolo e cambiando la distanza tra i punti che lo costituiscono.
Nel 1916, pochi anni dopo la prima formulazione della Relatività Generale, Einstein dedusse che
l’informazione riguardante la variazione della curvatura doveva propagarsi attraverso lo spazio alla
velocità della luce tramite delle onde. Queste sono le cosiddette onde gravitazionali, increspature
del tessuto dello spazio-tempo che si propagano alla stessa velocità delle onde elettromagnetiche
e che portano informazioni su come le variazioni nel tempo delle distribuzioni di materia e di
energia influiscono sulla curvatura dello spazio-tempo. Le onde gravitazionali interagiscono molto
debolmente con la materia e possono attraversare qualunque cosa senza perdere significativamente intensità. Ciò le rende un potente strumento di indagine di regioni lontane e in condizioni
estreme, ma le rende anche molto difficili da rilevare. Le onde gravitazionali costituiscono, quindi,
una predizione fondamentale della Relatività Generale che ancora non ha trovato una prova sperimentale diretta.
L’idea su cui si basa la loro rivelazione è quella di misurare variazioni di distanza estremamente
piccole. Essa nasce dal principio secondo il quale le onde gravitazionali producono minuscole oscillazioni nella distanza tra masse in caduta libera, isolate da tutte le altre forze tranne che dalla gravità. Tali oscillazioni possono essere intercettate usando la tecnica dell’interferometria laser.
I primi passi nella rivelazione di questi segnali gravitazionali sono stati compiuti con diversi esperimenti al suolo come le prime barre risonanti negli anni ‘60 e successivamente con gli interferometri laser, di tipo Michelson, LIGO (Laser Interferometer Gravitywave Observatory) e VIRGO. Il
principio di funzionamento di un interferometro è quello di dividere in due percorsi la luce coerente di un laser, che viene in seguito ricombinata ottenendo così una figura di interferenza. Se supponiamo che gli specchi dell’interferometro siano delle masse libere, l’effetto delle onde gravitazionali è un allungamento e accorciamento dei bracci dello strumento e quindi una variazione del
percorso ottico della luce. In questo modo la figura di interferenza verrà modificata. Un vantaggio
di questo schema è che esso non è risonante, cioè le frequenze naturali degli specchi sospesi sono
assai inferiori rispetto a quelle delle onde gravitazionali. Di conseguenza, anziché rispondere a una
soltanto delle frequenze dell’onda incidente, gli specchi seguiranno semplicemente l’andamento
dell’onda, qualunque sia la sua forma. In questo modo non ci si limita a registrare soltanto il passaggio dell’onda, ma si ottengono anche informazioni sulle sue caratteristiche. La potenza delle
oscillazioni viene misurata da un rivelatore di fotoni posto in uscita dall’interferometro ed è una
semplice funzione della differenza di fase dei due fasci di luce divisi dal beamsplitter, che si propagano nei due bracci e che si ricombinano in uscita.
In questo scenario, negli anni ‘90 nasce l’idea di impiegare l’interferometria laser nello spazio, su
scale più grandi e in un ambiente molto più quieto rispetto a quello del suolo dove si hanno molte
fonti di rumore tra cui principalmente il rumore sismico.
LISA (Laser Interferometer Space Antenna) è il primo progetto per un interferometro per onde
gravitazionali nello spazio, costituisce la prima missione congiunta ESA-NASA, con lancio previsto
nel 2025. A causa della curvatura terrestre, gli interferometri al suolo hanno dimensioni limitate a
pochi km di lunghezza, mentre LISA può essere milioni di volte più grande. Una maggiore lunghezza dei bracci può amplificare l’effetto delle onde gravitazionali, in tal modo LISA può raggiungere
un’accuratezza di ℎ ≈ ∆⁄ ≈ 10
nell’ampiezza della deformazione (1), misurando spostamenti dell’ordine delle frazioni di picometri. Tutto ciò, combinato con l’assenza di rumori sismici e
dei gradienti gravitazionali, permette all’antenna LISA di raggiungere una ragguardevole sensibilità
per onde gravitazionali di bassa frequenza emesse da sistemi astrofisici molto grandi e massivi.
Mentre i rivelatori di onde gravitazionali al suolo puntano alla rivelazione di segnali gravitazionali
con frequenze relativamente alte tra 10 - 100 Hz e 10000 Hz, LISA sarà sensibile nella banda di frequenze più basse tra 0.1 e 100 mHz.
Differenti tipi di sorgenti astrofisiche di onde gravitazionali corrispondono a questi diversi range di
frequenze. Con LISA si osserveranno segnali gravitazionali provenienti dalla coalescenza di buchi
neri supermassicci al centro di galassie in merging, da binarie ultra-compatte nella nostra galassia
e dalla caduta di nane bianche o stelle di neutroni in buchi neri massivi nei centri galattici. Tali sorgenti comporteranno numerose informazioni astrofisiche riguardo l’evoluzione di stelle e galassie
e serviranno come laboratori unici nel loro genere, e che porteranno a nuove conoscenze nella fisica fondamentale e nella cosmologia. Infine, LISA cercherà onde gravitazionali anche
nell’Universo primordiale, tra i resti del Big Bang e nelle stringhe cosmiche.
L’antenna LISA è costituita da una costellazione di tre satelliti in orbita eliocentrica, in una configurazione tale da formare un interferometro. Le orbite sono aggiustate in modo tale che i tre spacecraft siano posti in una formazione a triangolo equilatero con un lato di circa 5 milioni di km. Tale
distanza è stata scelta per ottimizzare la sensibilità di LISA a frequenze di sorgenti conosciute e attese. Le naturali orbite di free-fall dei tre spacecraft attorno al Sole, mantengono questa formazione triangolare negli anni. Ogni spacecraft racchiude e protegge dai disturbi esterni, due test-mass
in caduta libera, cubi riflettenti di 46 cm di lato, di una lega di oro e platino, in moto puramente
geodetico. Ognuna delle masse di prova è lo specchio terminale di un interferometro a singolo
7
braccio, mentre, l’altro specchio dello stesso interferometro, si trova in un diverso satellite. Ogni
spacecraft manda un fascio di luce laser agli altri due satelliti distanti e riceve un fascio da ognuno
di loro. La luce laser ricevuta è coerentemente combinata, in un fotorivelatore, con la luce di un laser di riferimento a bordo. La differenza di frequenza è registrata come un segnale a battimento.
Questi segnali registrati in ognuno dei tre spacecraft sono ritardati temporalmente e ricombinati in
una tecnica chiamata Time Delay Interferometry, che essenzialmente crea tre interferometri tipo
Michelson virtuali il cui segnale in uscita rappresenta il flusso di dati per LISA.
Le test-mass vanno mantenute il più possibile in caduta libera, cioè deve essere minimizzata la loro
accelerazione rispetto al sistema localmente inerziale. Gli spacecraft vanno mantenuti relativa-
mente centrati attorno alle test-mass (10 ⁄√ entro la banda delle misure). Il sistema di controllo drag-free aggiusta, in maniera appropriata, le posizioni degli spacecraft attorno alle testmass in ogni momento. Tale sistema consiste di un sensore inerziale, che misura le distanze relative, e di un sistema di propulsori per attuare le correzioni dovute. Cuore del controllo drag free è il
sistema di lettura degli spostamenti, il cosiddetto Gravitational Reference Sensor (GRS). Questo è
un sensore di posizione capacitivo solidale al satellite. La test mass è contenuta al suo interno senza alcun contatto. I segnali di posizione misurati costantemente dal sensore vengono utilizzati nel
loop di controllo per attuare i micro propulsori del satellite e mantenerlo sempre in posizione rispetto alla test-mass.
L’obiettivo scientifico di LISA è di raggiungere il limite di 4 ∙ 10 1⁄√ a circa 3 mHz (2) in sensibilità, spingendo all’estremo i limiti tecnologici di tutti i suoi sottosistemi. Il GRS gioca un ruolo
fondamentale nel raggiungimento di tale limite, che corrisponde a 3 ∙ 10 ⁄ ⁄ in
termini della purezza del moto geodetico delle test-mass. Ciò pone un limite alla sensibilità della
strumentazione alle basse frequenze. Il GRS deve assicurare allo stesso tempo un’alta sensibilità
nella lettura e un basso disturbo sulle test-mass.
Dati gli alti livelli di sensibilità richiesti, si è resa necessaria una missione per testare le prestazioni
del sensore, verificare la fattibilità della tecnologia drag-free e verificare il funzionamento degli attuatori elettrostatici per la movimentazione delle test-mass. Il Lisa Pathfinder (LISA PF) è
l’esperimento dimostrativo di tale tecnologia, una missione spaziale dedicata, con lancio previsto
per il 2015.
Il LISA PF è la seconda missione del tipo SMART (Small Missions for Advanced Research in Technology) dell’ESA, proposta per la prima volta nel 1998. Le tecnologie richieste per LISA sono estremamente complesse ed inoltre parte dell’hardware di volo non può essere testato al suolo a causa
dei rumori presenti sulla Terra. Per tale motivo si è implementata la missione LISA Pathfinder, per
testare le tecnologie critiche di LISA in un ambiente di volo.
Essenzialmente, il Pathfinder vuole mimare uno dei bracci della costellazione di LISA, accorciando
il braccio da 5 milioni di km a poche decine di centimetri, rinunciando alla sensibilità richiesta per
la rivelazione delle onde gravitazionali, ma mantenendo la tecnologia di misura: la distanza tra le
due test-mass è misurata usando una tecnica di interferometria laser simile a uno degli elementi
del sistema interferometrico di LISA. L’obiettivo scientifico della missione LISA PF consiste nel primo test in volo della purezza del moto geodetico delle test-mass, elemento fondamentale nel si8
stema di rivelazione delle onde gravitazionali. Questa missione consiste di un singolo spacecraft in
orbita nel punto lagrangiano L1, che vuole raggiungere una sensibilità in accelerazione differenzia-
le di 10 ⁄√ (3) su un intervallo di frequenza tra 1 - 100 mHz.
Lo spacecraft conterrà in particolare il LISA Technology Package che racchiude al suo interno le
test-mass ognuna con il suo sensore inerziale capacitivo, il cosiddetto Flight Model (FM), che fornisce informazioni sulla loro posizione al sistema di controllo drag-free e agli attuatori di movimento.
Il principale scopo di LISA Pathfinder è di dimostrare il principio del moto geodetico migliorando di
due ordini di grandezza i risultati delle precedenti missioni spaziali. Per raggiungere questo obiettivo, il LISA Technology Package è stato disegnato con caratteristiche molto stringenti per poter eliminare i disturbi esterni.
In previsione del lancio della missione di prova, è in atto una campagna di test a terra per caratterizzare il sensore, per escludere le sorgenti di disturbo più minacciose e dare una caratterizzazione
preliminare del modello di rumore su cui si basa il concetto della missione stessa. Il ground testing
si svolge attualmente presso i laboratori dell’Università di Trento con l’utilizzo di una facility appositamente disegnata per l’esigenza. La difficoltà maggiore nei test a terra è di riprodurre le condizioni di volo della test-mass: cioè avere una test-mass disaccoppiata dai rumori ambientali entro i
livelli di accelerazione residua richiesti da LISA. Per ottenere ciò viene usato un pendolo di torsione
a quattro masse, costituito da un braccio a croce ai cui estremi sono posizionate quattro test-mass
simili a quelle che voleranno sul Pathfinder. Queste mantengono le dimensioni, la forma e la qualità delle superfici riflettenti, ma hanno l’interno cavo per alleggerire la struttura in sospensione. Intorno a tre di queste masse sono posizionati i sensori di cui discuteremo in questo lavoro di tesi: il
Flight Model (ovvero il sensore inerziale capacitivo), lo Stiffness Compensator (un sensore capacitivo simile al precedente, adatto a migliorare le performance di lettura, ma con requisiti meno
stringenti) e il sensore ottico MRORO (Multiple Reflection Optical ReadOut). Il vantaggio di questa
configurazione consiste nell’avere un grado di libertà, cosiddetto soffice, lungo il quale, alle frequenze di interesse, ogni massa può considerarsi approssimativamente in caduta libera. E’ lungo
tale grado di libertà che verranno effettuate le misure di sensibilità, perché è questa la direzione
dell’ipotetico braccio dell’interferometro.
In particolare, il presente lavoro di tesi è dedicato allo studio delle prestazioni del sensore ottico
MRORO, un sistema progettato dal gruppo INFN di Napoli e testato a Trento. Questo è un sistema
di lettura di movimento a leva ottica potenzialmente più sensibile di quello capacitivo. La scelta di
una leva ottica è particolarmente interessante per la sua semplicità, che è una questione fondamentale nella progettazione di un sistema che deve lavorare nello spazio. La configurazione utilizzata per l’MRORO prevede di inviare un fascio laser su una delle facce riflettenti della test-mass,
attraverso una fibra ottica. Il fascio subisce cinque riflessioni prima di essere raccolto da un sensore di posizione del beam stesso: un fotodiodo a quadrante. I segnali raccolti sono poi trasformati
da segnali in corrente a segnali amplificati in Volt e, con un’opportuna calibrazione, in spostamenti
lineari ed angolari. Il sensore ottico permette di misurare anche le eventuali forze spurie che agiscono sulle test-mass del pendolo e di porre un limite superiore più stringente a tali forze. La sen9
sibilità richiesta lungo il grado di libertà sensibile per questo strumento (che corrisponde all’asse
ottico dell’interferometro) è di 10 ⁄ , mentre la sensibilità angolare è di circa 5 ∙
10 ⁄ . Per le forze spurie il limite superiore è di 6 ∙ 10 ! ⁄ . Tali specifiche, in
principio non così severe per un sensore ottico, diventano critiche se si tiene in conto la bassa frequenza di funzionamento (10 - 10 Hz), dove le derive termiche, sia sull’elettronica che sulla
meccanica, sono dominanti sul rumore intrinseco del sensore.
Il sensore capacitivo è già stato sviluppato e testato sul pendolo di torsione dal gruppo
dell’Università di Trento e volerà sul LISA Pathfinder. In caso di successo della missione di test, il
sensore capacitivo rimarrà sicuramente la soluzione di riferimento per LISA. Tuttavia i rischi legati
alla missione suggeriscono la presenza di una soluzione di backup. La soluzione alternativa è
l’Optical Readout System (ORO) (4), una versione precedente del sensore ottico MRORO, più sensibile rispetto al sensore capacitivo nelle misure di spostamento delle test-mass. Il sistema ORO è
già stato sviluppato e testato dal gruppo dell’Università di Napoli sul pendolo di torsione, mostrando ottimi risultati. Esso permetterebbe una significativa riduzione del rumore legato ad effetti
elettromagnetici, rendendo la back-action trascurabile. Oltre ad essere una soluzione di backup,
l’ORO potrebbe essere in grado di fornire informazioni extra sugli accoppiamenti tra i diversi gradi
di libertà.
Purtroppo il sensore ORO non sostituirà quello capacitivo, in quanto non è stato ancora sviluppato
in dettaglio e non si è ancora dimostrato che sia compatibile con l’ambiente spaziale. Il sensore
capacitivo è molto più avanti nello sviluppo e nel testing e volerà con la missione di test Pathfinder, rimanendo in tal modo la soluzione di riferimento per LISA. L’obiettivo principale resta comunque quello di realizzare una strumentazione che possa essere integrata nell’attuale design del
GRS, in modo tale da poter sostituire il sensore capacitivo in caso di guasto, una volta verificato
che le performance soddisfino i requisiti di LISA.
Il principio di funzionamento del sensore ORO è lo stesso del MRORO: un fascio laser viene inviato
attraverso una fibra ottica su una delle facce della test mass, subendo un’unica riflessione, infine
viene raccolto da un fotodiodo. La differenza tra i due sensori consiste in una migliore sensibilità
del sensore MRORO che permetterebbe di migliorare la misura delle forze spurie e permetterebbe
di porre un limite superiore migliore al rumore in forze. In caso di successo della missione Pathfinder, poche modifiche verranno apportate al design di LISA. Per questo motivo, il design del sensore inerziale del Pathfinder verrà assunto come base sulla quale poi adattare eventuali modifiche.
Compito non facile è, quindi, quello di riuscire a trovare una configurazione dell’ORO che permetta
una completa integrazione all’interno del sensore inerziale di LISA.
Vediamo brevemente la struttura del presente lavoro di tesi. Nel primo capitolo è presente una
panoramica della fisica delle onde gravitazionali, con accenni alla Relatività Generale. Quindi viene
mostrato il modo in cui queste si propagano, e le principali sorgenti astrofisiche da cui sono generate.
Nel secondo capitolo verranno illustrati i principi della rivelazione interferometrica al suolo con le
sorgenti di rumore che ne disturbano la rivelazione.
10
Nel terzo capitolo si mostra una panoramica sulla missione spaziale LISA, sulle sorgenti di segnale
che sarà in grado di rivelare e su quelle di rumore. Inoltre è introdotta la struttura della missione di
prova LISA Pathfinder.
Nel quarto capitolo viene presentato il Gravitational Reference Sensor, con le caratteristiche del
sensore capacitivo e della facility del pendolo di torsione a quattro masse.
Infine, nel quinto capitolo sono presentati gli studi relativi al sensore ottico MRORO. In particolare
sono mostrati il set-up del sensore, uno studio del fotodiodo a quadrante e delle sorgenti di rumore al variare della potenza ottica incidente. Sono mostrati i risultati della calibrazione del sensore e
delle misure più recenti dei rumori in potenza, accelerazione ed in forza.
Infine viene discusso come il MRORO possa migliorare le prestazioni della facility a pendolo di torsione per il ground testing di LISA PF e LISA.
11
Le onde gravitazionali
1 LE ONDE GRAVITAZIONALI
Le onde gravitazionali furono previste dal fisico tedesco Albert Einstein fin dalle prime formulazioni della sua Teoria della Relatività Generale nel 1916.
Queste sono soluzioni delle equazioni di campo di Einstein in approssimazione di campo debole e
costituiscono una distorsione della metrica che si propaga alla velocità della luce. La loro emissione ha luogo durante eventi cosmici catastrofici che coinvolgono grandi masse che cambiano la loro
distribuzione, come i sistemi di binarie coalescenti, le pulsar asimmetriche o il Big Bang.
Secondo la Teoria della Relatività Generale, la massa agisce sullo spazio-tempo perturbandolo in
modo che esso si curvi. Se la distribuzione della massa del sistema varia, si ottiene un’alterazione
della curvatura dello spazio-tempo circostante, che si propaga come onda gravitazionale e che
porta energia e momento angolare lontano dal sistema che l’ha generata.
Nonostante lo sviluppo di diverse tecniche al suolo per la rivelazione di tali onde, come gli interferometri laser e le barre risonanti, le onde gravitazionali non sono ancora state rilevate. I processi di
emissione e propagazione delle onde gravitazionali sono ben teorizzati, e, con lo studio del periodo di rivoluzione del sistema di pulsar binario PSR1913+16, scoperto nel 1974, l’esistenza della radiazione gravitazionale è stata provata in maniera indiretta. Questo sistema consiste di due stelle
di neutroni che orbitano l’una intorno all’altra. Una di queste è attiva ed emette nel radio come
una pulsar. Visto che gli impulsi radio osservati dalla Terra sono shiftati per effetto Doppler a causa
della velocità orbitale, il periodo orbitale e la sua variazione nel tempo possono essere determinati
con precisione. Se il sistema si comporta come previsto dalla Teoria della Relatività Generale, perderà energia attraverso l’emissione di onde gravitazionali. Come conseguenza, le due stelle di neutroni vedranno diminuire la loro distanza ed orbiteranno ad una frequenza più alta l’una intorno
all’altra. In oltre dieci anni di osservazione, due scienziati Hulse e Taylor, misurarono la progressiva
riduzione del periodo orbitale del sistema binario e verificarono che ciò poteva essere previsto con
molta precisione considerando la perdita di energia progressiva dovuta all’emissione di onde gravitazionali. I due scienziati vinsero il premio Nobel per aver dimostrato che il periodo orbitale del
sistema sta decrescendo esattamente al tasso previsto dalle formule di Einstein per l’emissione di
onde gravitazionali nelle binarie.
Il problema della rivelazione diretta del segnale gravitazionale dipende dal piccolo accoppiamento,
nel campo gravitazionale, tra la curvatura dello spazio-tempo e la distribuzione di massa-energia
che produce tale curvatura. Le onde gravitazionali sono onde trasversali e sono rappresentabili da
una matrice, ℎ"# , che contiene le informazioni sulla distorsione dello spazio-tempo indotta dal passaggio delle onde stesse. Un sistema binario comune, le cui dimensioni siano paragonabili a quelle
del Sistema Solare ($% ≈ 10
; $ ≈ 10 ) emette un’onda gravitazionale di ampiezza
ℎ ≈ 10 , misurata su distanze galattiche tipiche (migliaia di anni-luce: ' ≈ 10 ), e di fre-
quenza Ω ≈ 10 . Se invece il sistema binario è costituito da stelle di neutroni o buchi neri in
orbita estremamente ravvicinata ($ ≈ 10$% ), l’ampiezza dell’onda gravitazionale diventa
ℎ ≈ 10) , su distanze galattiche, o ℎ ≈ 10' , su distanze intergalattiche (milioni di anni-luce), e
la frequenza Ω ≈ 10
.
Si stimano quindi effetti talmente esigui, che tutti gli esperimenti implementati per rilevarle hanno
grandi problemi tecnici per raggiungere le sensibilità richieste.
1.1 Fondamenti di relatività generale
La Teoria della Relatività Generale è una teoria della gravitazione, una descrizione geometrica
di come le distanze nello spazio-tempo possano essere misurate in presenza di massa. Lo spaziotempo viene presentato come un’entità dinamica, distorta dalla materia contenuta in essa e che
impone alla materia come muoversi ed evolvere.
Questa teoria ha come base quella della Relatività Ristretta, dalla quale segue in maniera naturale
trattare spazio e tempo come delle quantità interdipendenti, in quanto osservatori in moto relativo tra loro in due sistemi di riferimento inerziali diversi, non osserveranno mai due eventi che siano simultanei tra loro e non potranno misurare le lunghezza nella stessa maniera. Quindi, in relatività, è naturale trattare spazio e tempo insieme, parlando così di uno spazio con tre dimensioni
nello spazio e con una nel tempo. Tale spazio può essere descritto come una varietà quadridimensionale, il cosiddetto spazio-tempo di Minkowski. Ogni evento in tale spazio è indicato con quattro
coordinate (*+ = - ' , - , - , - ) dette coordinate curvilinee. La metrica di tale varietà si
scrive come
= /01 - 0 - 1
con /01 tensore metrico diagonale.
Secondo la Relatività Generale, in questo spazio a quattro dimensioni, le coordinate spaziali e
temporali sono trattate in maniera uguale, i sistemi inerziali sono equivalenti e la velocità è quella
della luce. Queste affermazioni derivano dal cosiddetto Principio di Equivalenza, secondo il quale è
impossibile distinguere localmente gli effetti di un campo gravitazionale da quelli di
un’accelerazione uniforme. Ciò vale per qualsiasi esperimento, come, ad esempio, l’osservazione
del comportamento di una particella in caduta libera. Si pensi al caso pratico di un corpo che viene
fatto accelerare liberamente sotto l’azione della gravità. Per esempio un ascensore che cade.
L’accelerazione verso il basso cancella l’attrazione gravitazionale e il sistema diventa senza peso.
Questa situazione è indistinguibile dal caso in cui l’ascensore si trovi fermo in assenza di un campo
gravitazionale esterno. Einstein era interessato a capire come il cambiamento di sistema di riferimento, da un sistema non accelerato ad uno accelerato, potesse alterare la gravità. Secondo Einstein, dato un campo gravitazionale qualunque, è possibile trovare un sistema di coordinate che è
13
inerziale almeno localmente. In tali sistemi, l’accelerazione dovuta alla gravità è essenzialmente
costante: tutti i laboratori locali in caduta libera e non ruotanti sono pienamente equivalenti per lo
svolgersi degli esperimenti fisici. Einstein introduce, quindi, una nuova definizione di sistema di riferimento inerziale, che non necessita più dell’astrazione di un universo vuoto. Il concetto di spazio separato da ogni contenuto fisico non esiste.
Questo principio è chiamato quindi, Principio di Equivalenza di Einstein e può essere formulato secondo i seguenti punti:
1. Il Principio di Equivalenza in forma debole è valido;
2. Il risultato di un qualsiasi esperimento localmente non-gravitazionale è indipendente
dalla velocità dell’apparato in caduta libera;
3. Il risultato di un qualsiasi esperimento localmente non-gravitazionale è indipendente da
dove e quando questo viene effettuato.
Per esperimento localmente non-gravitazionale si intende un esperimento effettuato in un piccolo
laboratorio in caduta libera, così da evitare le non omogeneità.
Da tale principio segue, quindi, che l’interazione gravitazionale dipende dalla curvatura dello spazio-tempo. In generale l’accelerazione gravitazionale cambia da un punto all’altro dello spazio a
seconda di come siano distribuite le masse nell’Universo. La realtà fisica dello spazio è rappresentata allora da un “campo”, la metrica 234 , descritto da funzioni continue di quattro variabili indipendenti: le coordinate dello spazio e del tempo. Inoltre, le traiettorie seguite dai corpi in caduta
libera attraverso lo spazio-tempo sono curve definite dalle proprietà geometriche dello spaziotempo, dette geodetiche. Sono le curve di minima lunghezza spazio-temporale che congiungono
due eventi assegnati. L’equivalenza del principio di Einstein suggerisce che la gravità non è in realtà affatto una forza, ma una proprietà dello spazio-tempo attraverso cui il corpo si muove.
Le equazioni che legano il campo gravitazionale alla materia e che esprimono il modo in cui la distribuzione di quest’ultima determini la geometria dello spazio-tempo sono le equazioni di campo
di Einstein:
1
889
$34 − 234 $ = − Γ34
2
*
0
dove $34 è il tensore di Ricci, definito come la contrazione del tensore di Riemann $134
, che indi-
ca la curvatura e che nel vuoto si annulla; R è la curvatura scalare, definita come contrazione del
tensore di Ricci; Γ34 è il tensore energia-impulso, un tensore simmetrico di dieci componenti indipendenti che descrive, in un sistema di riferimento arbitrario, le densità ed i flussi energiaimpulso. La parte sinistra dell’equazione descrive la curvatura dello spazio-tempo. Infatti si può
dimostrare che il tensore di curvatura si ricava dalla derivata seconda della metrica dello spaziotempo. La parte destra descrive il contenuto di materia della teoria, cioè la distribuzione della materia-energia che riempie lo spazio-tempo. Quindi la forma della metrica dipende dalla distribuzione e dal tipo di materia in esame. Dalla simmetria del tensore di Ricci e di quello metrico, il campo
gravitazionale è descritto da dieci equazioni differenziali non-lineari del secondo ordine in 234 . Risolvere le equazioni di Einstein vuol dire trovare 234 connesso col tensore energia-impulso (5).
14
Le equazioni, attraverso il tensore energia-impulso, legano la densità di massa al tensore di Ricci,
un particolare insieme di funzioni non lineari del tensore metrico e delle sue derivate prime e seconde, spaziali e temporali. Esso è noto anche come tensore di curvatura, perché nelle varietà bidimensionali si riduce ad uno scalare, numericamente uguale, in ogni punto, all’inverso del raggio
di curvatura locale. Negli ordinari spazi euclidei, esso è ovunque nullo. Da qui nasce la visione secondo la quale la presenza di materia determina un incurvamento dello spazio-tempo.
1.2 La propagazione delle onde gravitazionali
Einstein stesso si chiese se potessero esistere onde gravitazionali come soluzioni delle equazioni di campo, nella stessa maniera in cui le onde elettromagnetiche sono soluzioni delle equazioni di Maxwell. Egli scoprì l’esistenza di soluzioni in forma d’onda, in cui un’increspatura dello spazio-tempo si propaga attraverso lo spazio vuoto, come un’entità indipendente, a velocità uguale a
quella della luce. La fisica di tali onde è descritta in termini del tensore di curvatura di Riemann,
che soddisfa un’equazione d’onda virtualmente identica a quella del campo elettromagnetico.
Il meccanismo di produzione e propagazione delle onde gravitazionali è analogo a quello delle onde elettromagnetiche. La differenza principale tra i due tipi di forza è che l’elettromagnetismo è
una forza sia attrattiva che repulsiva, mentre la gravità è puramente attrattiva. Le onde elettromagnetiche possono essere spiegate in termini dello spostamento di una particella sorgente carica.
Una carica elettrica sottoposta ad un accelerazione di breve durata, produce un impulso ondulatorio trasverso dipolare. Un radiatore a dipolo elettrico può essere assimilato a due particelle, una
carica positivamente e l’altra negativamente, unite da una molla. L’oscillazione di questa coppia
costituisce un dipolo variabile e vengono generate delle onde elettromagnetiche.
Un tema analogo può essere svolto per la gravità, con un sistema simile di due masse unite da una
molla. In questo caso, ogni massa costituisce un dipolo gravitazionale e l’intero sistema, invece, un
cosiddetto quadrupolo gravitazionale. Il sistema irraggia onde gravitazionali come risultato del
momento di quadrupolo variabile. Ciò è perfettamente compatibile con il fatto che la gravità è un
campo tensoriale e la sorgente deve contenere più componenti di un dipolo (vettore) per stimolarla.
Un’importante conferma dell’esistenza di meccanismi di propagazione simili a quelli del campo
elettromagnetico è fornita dallo studio delle equazioni di Einstein in approssimazione di campo
debole. Quest’approssimazione è resa possibile dal fatto che, all’aumentare della distanza dalle
sorgenti, la metrica dello spazio-tempo tende ad approssimarsi all’ordinaria metrica piatta. In approssimazione di campo debole, che significa abbastanza lontano dalle sorgenti del campo gravitazionale, in modo tale da poter considerare lo spazio-tempo quasi piatto, è possibile trovare un sistema di coordinate in cui il tensore metrico può essere scritto come:
234 = /34 + ℎ34 ,<ℎ34 < ≪ 1
15
dove ℎ34 è una piccola perturbazione nella metrica di Minkowski e /34 il tensore diagonale
−1 0 0 0
0 1 0 0
.
η µν =
0 0 1 0
0 0 0 1
Si vogliono sviluppare, ora, le equazioni di campo nella metrica dello spazio piatto. Ci sono infiniti
sistemi di coordinate che permettono ciò, per cui si può imporre un sistema di coordinate semplificativo, una trasformazione chiamata gauge di Lorentz:
ℎ>34 = 0
con ℎ>34 tensore simmetrico ℎ>34 = ℎ34 − /34 ℎ, in cui ℎ = /34 ℎ34 è la traccia di ℎ34 .
Le equazioni di campo di Einstein allora si semplificano:
1689
△@ ℎ>34 = − Γ34
*
1.
ED
dove △@ = /34 A3 A4 = ∇ − D EF D è l’operatore di D’Alembert (6).
C
Queste equazioni rappresentano le equazioni di campo di Einstein linearizzate per piccole deviazioni da uno spazio-tempo piatto; hanno sei componenti indipendenti e non più dieci, grazie
all’introduzione della gauge di Lorentz.
Dalla loro soluzione si può vedere che il tensore energia-impulso non solo produce una perturbazione della metrica dello spazio-tempo circostante, ma anche una variazione della stessa, che genera perturbazioni che si propagano alla velocità della luce attraverso lo spazio-tempo.
Nel vuoto, cioè per sorgenti di campi gravitazionali all’infinito, in assenza di materia, queste equazioni diventano:
2.
Δ@ ℎ>34 = 0.
Allo stesso modo delle equazioni di Maxwell per il campo elettromagnetico, anche queste equazioni ammettono una possibile soluzione per la perturbazione della metrica >>>>>
ℎ34 di tipo onda piana,
la cui forma generica si può scrivere:
3.
ℎ>34 = I34 J-KLMNO+ − ⁄*PQ
La gauge di Lorentz richiede che
I3' = I3
I sei gradi di libertà sono ora ridotti da sei a due, applicando una seconda gauge conosciuta come
trasversa e senza traccia (in breve TT), che richiede
IR' = 0
I00 = 0.
Il suffisso TT indica una particolare scelta del sistema di coordinate, con la quale la polarizzazione è
rappresentata da una matrice trasversa (ortogonale alla direzione di propagazione) a traccia nulla.
L’ultima delle due condizioni per la gauge, identifica univocamente il sistema di coordinate: queste
coordinate sono chiamate coordinate inerziali e corrispondono alle curve geodetiche delle masse
in caduta libera.
Definendo le componenti non nulle di I34 come
16
la (3.) può essere riscritta:
dove
ℎ× ≡ I = I
ℎU ≡ −I = I
VV
ℎ>34
= LℎU JU + ℎ× J× QJ-KLMNO+ − ⁄* PQ
0
0
e+ =
0
0
0
0 0 0 0
0
0 0 1 0
e× =
0 −1 0
0 1 0 0
0 0 0 0
0 0 0
denotano i due stati di polarizzazione. Orientando la terna di assi spaziali del sistema di riferimento TT in modo da far coincidere l’asse z con la direzione di propagazione dell’onda, tutte le polarizzazioni si possono esprimere come combinazione a coefficienti complessi di queste due matrici.
0
1
0
0
1.3 Effetto fisico del passaggio delle onde gravitazionali
Vediamo ora l’effetto fisico di un’onda gravitazionale su un insieme di particelle in caduta libera. Come si è detto, le onde gravitazionali sono trasverse e possiedono due stati di polarizzazione,
etichettati con ‘+’ e ‘×’. Ognuno dei due stati di polarizzazione deforma lo spazio-tempo in modo
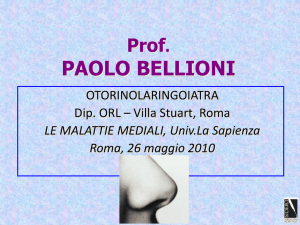
peculiare. Se si considera un anello di masse di prova in moto geodetico e un’onda si propaga lungo una direzione ortogonale al piano che contiene l’anello, l’effetto sarà quello mostrato in Figura
1.
Figura 1: Effetto del passaggio di un’onda gravitazionale su un anello di particelle distribuite su un piano perpendicolare alla radiazione incidente. (a) mostra la perturbazione su un anello come funzione del tempo dovuta solo alla
componente WU ≠ Y; (b) mostra la perturbazione dovuta solo alla componente W× ≠ Y; (c) mostra il contributo totale h(t).
17
L’anello si riduce e si allarga periodicamente lungo le direzioni ortogonali e ciò dipende dallo stato
di polarizzazione dell’onda gravitazionale incidente. Il passaggio dell’onda causa una variazione periodica nelle distanze tra masse di prova in caduta libera: questo è l’effetto fisico su cui si basano
tutti i rivelatori di onde gravitazionali. Rilevare questo effetto è estremamente difficile a causa del
fatto che le variazioni nella distanza sono estremamente piccole.
Sia Z 0 = -0 − -0 il quadrivettore distanza tra due masse in caduta libera, inizialmente a riposo.
L’equazione del moto delle particelle è detta equazione delle geodetiche. Al passaggio dell’onda
gravitazionale si produce un’oscillazione del tensore di curvatura e la separazione tra le masse è
(6):
4.
Z " 1
=
ℎ
Z
"#
#
[ 2
#
Questa equazione, con una condizione iniziale ZO'P = *\+, descrive le oscillazioni di una delle
masse nel sistema di riferimento proprio dell’altra. L’onda gravitazionale, in questa approssimazione, è come una forza extra, chiamata forza mareale.
Se L è il diametro dell’anello, si può vedere che la deformazione ∆ dell’anello è in relazione con
l’ampiezza dell’onda h (1):
∆ 1
= ℎ.
2
1.4 Generazione delle onde gravitazionali
Allo scopo di capire il processo che genera le onde gravitazionali da parte di una sorgente
massiva, è necessario considerare le equazioni di campo di Einstein linearizzate (1.), quando la materia è presente e il tensore energia-impulso non è nullo.
E’ possibile decomporre sorgenti non relativistiche in multipoli, proprio come per il campo elettromagnetico. Il momento di monopolo della distribuzione di massa corrisponde alla massa totale,
che è conservata. Analogamente a ciò che si conclude nell’elettromagnetismo per la conservazione della carica, non c’è emissione di radiazione gravitazionale dal monopolo. A differenza di ciò
che accade per la radiazione elettromagnetica, il termine di dipolo è nullo: il momento di dipolo
della distribuzione di massa è conservato, perché la sua derivata nel tempo è il momento totale
della sorgente, che è costante. Quindi, il termine dominante della radiazione gravitazionale risulta
essere la derivata seconda del momento di quadrupolo della densità di energia della sorgente:
5.
29 _#]
ℎ>#] = ^ `
*
+ F
a
dove r è la distanza tra la sorgente ed il punto in cui è osservato il campo; +b = + − ⁄* è il tempo
di ritardo; il momento di quadrupolo della densità di energia è dato da:
18
1
_#] = c dO+P e-# -] − f#] g -.
3
Quest’ultimo è proporzionale alla massa della sorgente e dipende dall’asimmetria della sua densità, cioè ha componenti diverse da zero solo se la distribuzione di massa si discosta dalla simmetria
sferica. Quindi, l’ampiezza della perturbazione metrica h, è proporzionale alla derivata seconda del
momento di quadrupolo (legato alla distribuzione di massa) ed è inversamente proporzionale alla
distanza dalla sorgente r (1) (7).
La dipendenza quadrupolare è il motivo per cui la radiazione gravitazionale è molto debole. Dal valore della costante di accoppiamento tra la radiazione gravitazionale e la materia, cioè 9 ⁄* =
8,3 ∙ 10 ⁄h2
, si può vedere quanto sia trascurabile l’interazione gravitazionale rispetto
alle altre interazioni fisiche fondamentale e agli altri fenomeni di interazione della materia. Una
costante di accoppiamento simile significa anche che l’interazione tra le onde gravitazionali e il rivelatore è molto piccola, ed è questo che rende la rivelazione delle onde gravitazionali un obiettivo così impegnativo.
Risulta evidente, quindi, che al fine di generare un’emissione rilevabile di onde gravitazionali, la
variazione di momento di quadrupolo nella sorgente deve essere enorme. Inoltre, la natura quadrupolare della radiazione gravitazionale implica che le sorgenti con una simmetria sferica non
emettono tali onde. Per generare sorgenti rilevabili, bisogna che queste abbiano una grande energia cinetica interna dovuta alle componenti non sfericamente simmetriche.
1.5 Sorgenti di onde gravitazionali
L’emissione per onde gravitazionali causa una perdita di energia dalla sorgente che può essere
scritta analiticamente come:
_#]
i
9
= jk k .
+ 5*
+
#]
Questo è un valore medio preso su un periodo caratteristico della sorgente. Il coefficiente
9 ⁄5* = 5,5 ∙ 10 h2 indica uno standard di efficienza di produzione delle onde gravitazionali. Il suo valore così basso indica che le sorgenti astronomiche sono gli unici oggetti che possiamo rivelare.
Stimiamo l’ordine di grandezza dell’energia emessa dalla sorgente tramite le onde gravitazionali.
Consideriamo un corpo di massa M e raggio R e supponiamo che il momento di quadrupolo vari su
un tempo scala T. Il suo valore è circa _ ≅ m$ , dove s è un fattore di asimmetria (s = 0 per simmetria sferica). Per sorgenti periodiche si ha _n ≈ N
m$ , per cui l’energia emessa è dell’ordine di
i
9
≈ m $ No
+ 5*
19
dove ω è la frequenza di variazione del momento di quadrupolo su un tempo scala T. Questa relazione può riscriversi introducendo il raggio di Schwarzchild $% ≈ 9m ⁄* , per cui
i 5* $% q o
≈
e g p r
+
9
$
*
con v velocità della sorgente (8).
Dalla stima di questa equazione, è possibile determinare le condizioni per una forte emissione delle onde gravitazionali:
1. La sorgente deve essere estremamente densa, con raggio R comparabile a quello di
Schwarzchild Rs;
2. La sorgente deve avere una velocità che si avvicina a quella della luce;
3. Il moto della sorgente deve essere asimmetrico.
Quindi, l’emissione di onde gravitazionali assume importanza per oggetti relativistici e compatti.
Solo gli oggetti astronomici possono irradiare abbastanza energia da essere rilevati, ed è impossibile avere sorgenti di onde gravitazionali in laboratorio.
Per avere una stima dell’ordine di grandezza dell’ampiezza delle onde gravitazionali emesse da
una sorgente, si può approssimare la derivata seconda del momento di quadrupolo presente nella
(5.) con la parte dell’energia cinetica interna della sorgente, associata con i moti a simmetria non
sferica. Per cui
9m
ℎ≈ *
che, per una sorgente lontana circa 10 , come un tipico cluster di galassie, con una massa pari
a quella solare m⨀ ≈ 10
' h2, con 9 ≈ 10 ! ⁄h2 e * ≈ 10 ⁄, è dell’ordine di
ℎ ≈ 10 .
Si può stimare anche un limite superiore per la frequenza di un’onda gravitazionale. Si deve considerare che una sorgente di onde gravitazionali non può essere più piccola del suo raggio di Schwarzchild Rs e non può emettere fortemente per periodi più brevi del tempo che impiega la luce a
percorrere la sua circonferenza. Ciò porta a scrivere un massimo per le frequenza di
*
m⊙
t≤
~10 .
489m
m
Quindi ci aspettiamo frequenze più alte per oggetti massivi e compatti come le stelle di neutroni e
i buchi neri (9).
Le sorgenti di onde gravitazionali possono essere classificate in tre tipi, a seconda del comportamento temporale della radiazione. Ci sono sorgenti impulsive, come le esplosioni di supernova, se
i segnali durano solo per breve tempo rispetto al tempo tipico di osservazione; sorgenti periodiche
e quasi-periodiche, come le binarie compatte coalescenti e le stelle di neutroni in rotazione, nel
caso i segnali siano sovrapposizioni di segnali sinusoidali con frequenze più o meno costanti su
tempi lunghi rispetto ai tempi di osservazione; infine sorgenti stocastiche, se i segnali fluttuano
stocasticamente e durano per un tempo lungo rispetto a quello di osservazione (10) (8).
20
1.5.1
Sorgenti impulsive
Queste sono sorgenti che emettono un segnale impulsivo in un periodo molto breve. Le sorgenti di
questo tipo sono le supernove, specialmente quelle di tipo II, che esplodono in modo non simmetrico. Il meccanismo base è conosciuto: quando una stella massiva finisce il suo combustibile nucleare, il nucleo centrale inizia a collassare e la stella non riesce a sostenere sé stessa con la propria gravità. Ciò porta ad una violenta espulsione degli strati più esterni della stella causata dal
rimbalzo dall’onda di shock sul nucleo centrale divenuto degenere nel collasso. Il segnale gravitazionale è condizionato dalla dinamica del nucleo che collassa e l’ampiezza dell’onda dipende dalla
velocità e dall’asfericità del collasso. Se f è la frequenza caratteristica (l’inverso del tempo di collasso) e ∆ixy l’energia emessa come onda gravitazionale, si ottiene come ampiezza dell’onda (8)
△ ixy
1h 10mK*
ℎ ∼ 2,7 ∙ 10
^
`
e
ge
g.
m⊙ * t
Nella nostra galassia, cioè in un raggio di circa 10 kpc, ci si aspetta un’esplosione di supernova ogni
40 anni circa. Invece nel cluster di Virgo, cioè a 10 Mpc dalla Terra, ci si aspetta qualche evento per
anno. Visto che la maggior parte dell’energia rilasciata nell’esplosione si origina dall’energia di legame gravitazionale, la frequenza dell’onda aspettata è dell’ordine dei kHz, la frequenza dinamica
naturale della sorgente. Quindi, i rivelatori di onde gravitazionali devono essere sensibili ad ampiezze dell’ordine di 10 ÷ 10
nella regione dei kHz se si desidera un tasso di qualche evento
per anno.
La rivelazione di tali sorgenti permetterebbe di ricavare informazioni sulla stessa esplosione e sui
processi con cui nascono stelle di neutroni e buchi neri.
'
1.5.2
Sorgenti periodiche
I sistemi periodici, per la loro costituzione intrinseca, emettono radiazione gravitazionale ad
una frequenza ben definita per una consistente quantità di tempo. Questo è il caso delle binarie
coalescenti, sistemi costituiti da oggetti fortemente compatti, in cui le due componenti ruotano
una intorno all’altra, molto vicine, con un’alta frequenza angolare, in modo tale che la derivata seconda del momento di quadrupolo è grande abbastanza da avere un’efficienza di emissione notevole. Questi sistemi sono costituiti da due stelle di neutroni (NS-NS), da due buchi neri (BH-BH) o
da una stella di neutroni ed un buco nero (NS-BH) in rotazione tra loro.
Una particolare caratteristica di queste sorgenti è che il segnale, nella prima decina di secondi di
rivelazione, è predicibile. Durante questo periodo, infatti, le due stelle sono ancora ben separate,
quindi i calcoli possono essere effettuati in approssimazione di campo gravitazionale debole in
21
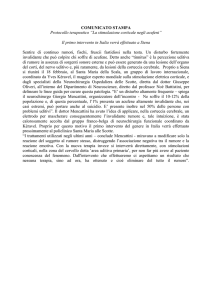
modo da ottenere una forma d’onda calcolabile. Il segnale tipico è chiamato “chirp”, dalla sua somiglianza con i gorgheggi degli uccelli, come si può vedere in Figura 2.
Figura 2: Forma d’onda di stelle che spiraleggiano tra loro, negli ultimi secondi prima del merging.
L’ampiezza e la frequenza dell’onda emessa crescono durante il periodo di coalescenza fino a raggiungere progressivamente l’ordine del kHz al momento dell’urto. Dopo questo periodo le stelle si
fondono e la forma d’onda è molto difficile da prevedere. Tale difficoltà porta problemi anche nella rivelazione del segnale e nella sue estrazione dal rumore. D’altra parte però, durante la fase di
coalescenza, il sistema raggiunge accelerazioni di quadrupolo estremamente elevate, essendo le
stelle molto vicine e ruotando molto velocemente, e quindi il sistema diventa una sorgente di onde gravitazionali di notevole intensità.
Visto che l’energia è emessa durante molti cicli, l’ampiezza dell’onda è minore rispetto al caso delle supernove. Il tempo caratteristico di osservazione dell’impulso è di pochi minuti e, durante questo tempo, la frequenza cambia da alcune decine di Hz a qualche kHz, e la stima dell’ampiezza è
} m
t 100mK*
ℎ~10
^ ` ^ ` e
g e
g
m⨀
m⨀ 100
dove M e µ indicano rispettivamente, la massa totale e quella ridotta del sistema.
Questa coalescenza, in un raggio di circa 100 Mpc, dovrebbe avere un tasso di qualche evento per
anno (8).
22
1.5.3
Sorgenti stocastiche
Un’altra possibile sorgente di onde gravitazionali è il fondo stocastico prodotto durante
l’espansione primordiale dell’Universo. La rivelazione di questa radiazione gravitazionale può dare
informazioni sullo stato dell’Universo in tempi scala di + ≈ 10' − 10o ovvero alla scala delle
temperature ~ ≈ 10) − 10' . La radiazione gravitazionale stocastica è composta dalla sovrapposizione casuale di diverse componenti ed è caratterizzata dal parametro adimensionale:
1 d OtP
Ω Ot P =
,
dC log t
dove d Ot P è la densità di energia del fondo stocastico di onde gravitazionali e dC è la densità critica dell’energia dell’Universo. Molti modelli inflazionari prevedono uno spettro piatto per
d OtP. Il limiti più rigidi su d Ot P sono imposti dalle osservazioni del satellite COBE
sull’anisotropia della radiazione cosmica di fondo nelle microonde. I limiti ricavati dalle osservazioni di COBE suggeriscono che l’inflazione standard non produce, nell’epoca attuale, un fondo co-
"
"
~10 (11). Questo limite è troppo debole da raggiungere per i rilesmico più forte di Ω
vatori progettati finora, in quanto concerne frequenze fuori dalla banda prevista per gli attuali rivelatori interferometrici (8). Comunque, ci sono anche modelli cosmologici che prevedono spettri
con diverse bande di frequenza e quindi una radiazione gravitazionale rilevabile con gli attuali
strumenti.
23
I rivelatori di onde gravitazionali
2 I RIVELATORI DI ONDE GRAVITAZIONALI
Lo scopo dei rivelatori di onde gravitazionali è osservare l’effetto del passaggio di una di queste onde. L’obiettivo è di determinare la variazione di lunghezza indotta sulla distanza tra due
masse, così come espresso nell’equazione (4.). Il campo dell’onda gravitazionale si comporta a tutti gli effetti come una forza applicata reciprocamente tra le masse. L’effetto fisico misurabile consiste nello spostamento delle due masse di una piccolissima quantità proporzionale alla distanza
tra le due. Ciò si può esprimere in una semplice notazione come
1
∆ = ℎ
2
dove L è la distanza tra le due masse e ∆ la variazione avvenuta. Una tale rivelazione è piuttosto
ambiziosa, in quanto, assumendo un’ampiezza ℎ~10 e osservando su una lunghezza
dell’ordine di ~100, lo spostamento stimato è dell’ordine di 10 , sostanzialmente più piccolo del diametro nucleare di 10 .
Una maniera per facilitare l’osservazione di una forza di questo tipo e dello spostamento che ne
consegue, consiste nel collegare elasticamente le due masse, in modo da realizzare un oscillatore
armonico. Se il segnale gravitazionale ha componenti spettrali vicine alla frequenza propria
dell’oscillatore, lo spostamento indotto sulle masse risulta amplificato, grazie al fenomeno della risonanza. È questo il principio in base al quale sono stati concepiti, all’inizio degli anni '60, i primi
rivelatori di onde gravitazionali: le cosiddette barre risonanti (12).
I rivelatori di questo tipo sono costituiti essenzialmente da un cilindro metallico di circa un metro
di lunghezza e massa di circa una tonnellata. L’elasticità propria del metallo rende il cilindro un sistema risonante in diversi modi ed a diverse frequenze: in particolare, il primo modo associato alla
compressione e dilatazione lungo il suo asse ha frequenza propria intorno a 1 kHz. Sono dunque
osservabili, in linea di principio, gli eventi impulsivi quali le esplosioni di supernova e la coalescenza di binarie compatte, le cui frequenze tipiche possono appunto raggiungere questo ordine di
grandezza.
Al passaggio di un’onda gravitazionale, la barra, che ha una frequenza propria di risonanza, comincia ad oscillare, variando la propria lunghezza L di una quantità ∆. Se la frequenza dell’onda gravitazionale è nella banda passante della barra risonante, allora è possibile misurare la variazione di
lunghezza ∆ ≈ ℎ ⁄2.
Il sistema di trasduzione è costituito da un piccolo oscillatore, applicato ad un’estremità del cilindro e accordato sulla frequenza propria della barra. I due oscillatori interferiscono dando luogo ad
un battimento: la vibrazione trasmessa alla barra dalla perturbazione gravitazionale si trasferisce
gradualmente al piccolo oscillatore, con un fattore di amplificazione α, pari alla radice del rapporto
delle loro rispettive masse. La vibrazione è convertita in segnale elettrico sfruttando la variabilità
con la distanza dell’accoppiamento, capacitivo od induttivo, tra cilindro e massa di prova. L’energia
che l’antenna riceve dall’onda gravitazionale è proporzionale alla massa della stessa, al quadrato
del fattore di qualità e alla lunghezza della barra. I limiti principali alla sensibilità di questi strumenti sono il rumore termico della barra e quello sismico.
Tra gli esperimenti di questo tipo attivi nel mondo, ricordiamo: AURIGA, NAUTILUS ed EXPLORER
in Italia, ALLEGRO negli Stati Uniti.
Nella ricerca delle onde gravitazionali emesse da una sorgente astrofisica si possono adottare,
quindi, due strategie. Una è quella di costruire un rivelatore accordato a qualche frequenza attesa
(cioè la frequenza di pulsazione di una stella di neutroni o il periodo di rotazione di una stella binaria) in modo che l’antenna presenti il massimo della risposta ai segnali che ci si aspetta. L’altra è
quella di costruire un rivelatore a larga banda che risponda a una ampia gamma di segnali in arrivo, in base al criterio che le onde più intense sono brevi impulsi provenienti da eventi relativi a buchi neri, la cui frequenza di picco può essere stimata solo molto grossolanamente.
Considerato l’effetto provocato da un’onda gravitazionale su un insieme di masse circolari che variano nel tempo, è naturale, allora, pensare di usare un interferometro di Michelson come antenna. Supponiamo che gli specchi di un interferometro siano delle masse libere di muoversi, l’effetto
del passaggio di un’onda gravitazionale sarà un allungamento ed accorciamento dei bracci che costituiscono lo strumento, ai cui estremi si trovano gli specchi. Dalla variazione del percorso di interferenza è possibile ricostruire il passaggio dell’onda gravitazionale. Vediamo le caratteristiche
principali di un interferometro e la sua configurazione come rivelatore gravitazionale, tenendo in
mente che lo scopo principale di questi rivelatori è misurare l’ampiezza e la polarizzazione
dell’onda gravitazionale come funzioni del tempo.
2.1 I rivelatori interferometrici
L’interferometro è uno strumento di solito usato per fare misure di lunghezza con altissima
precisione, sfruttando il fenomeno dell’interferenza della luce. Esso consiste di tre specchi sistemati in una configurazione a forma di “L” dove si ha un beam splitter al vertice e gli altri due specchi alla fine di ogni braccio dello strumento.
25
Figura 3: interferometro di Michelson sospeso.
Un laser inietta un fascio all’interno del sistema di specchi. Questo viene diviso in due dal beam
splitter. I due fasci ottenuti vengono entrambe riflessi dai due specchi e convogliati dallo stesso
beam splitter verso un fotodiodo. Tale rivelatore si trova in uscita dall’interferometro e converte i
fotoni rilevati in un segnale in corrente.
In uscita dallo strumento arrivano, quindi, due immagini del fascio in ingresso, che si ricongiungono sul fotodiodo producendo interferenza. Si verifica interferenza costruttiva o distruttiva, a seconda se la differenza tra i cammini ottici dei due fasci sia un multiplo intero o semi-intero della
lunghezza d’onda della radiazione incidente. La differenza di fase tra i due fasci in uscita dipenderà
dalla differenza di lunghezza dei bracci dell’interferometro e dalla lunghezza d’onda del laser
f ≈
2ΔL. Nel caso di interferenza costruttiva, i raggi che interferiscono ricostruiscono intera-
mente il raggio di partenza, in caso di interferenza distruttiva si elidono. Quindi, una differenza di
cammino ottico pari a mezza lunghezza d’onda della radiazione incidente, corrisponde allo spostamento di ciascuna frangia nella posizione occupata precedentemente da una frangia adiacente.
Il funzionamento di un interferometro di Michelson come rivelatore di radiazione gravitazionale,
richiede che gli specchi siano il più possibile in una condizione di caduta libera, minimizzando tutte
le perturbazioni non-gravitazionali, in modo tale da rivelare un’onda gravitazionale come una variazione di fase della luce in uscita dallo strumento. Tutto ciò richiede una tecnologia estremamente sofisticata. Per un interferometro di questo tipo al suolo si usano ottiche sospese ad un pendolo
meccanico, con una frequenza di risonanza ω0 più bassa dell’intervallo di frequenze da misurare. Il
principio di funzionamento è tale che il passaggio dell’onda fa muovere in contro fase gli specchi
sospesi generando un movimento nelle frange di interferenza.
Consideriamo un’onda gravitazionale piana polarizzata “+” e di frequenza f, che si propaga lungo
una direzione z. Supponiamo che l’interferometro considerato abbia il beam splitter all’origine del
sistema di riferimento. I due specchi finali, si trovano a distanza L da questo, rispettivamente lungo
gli assi x e y. Consideriamo, inoltre, che le ottiche dell’interferometro siano delle masse in caduta
libera.
26
Figura 4: Effetto di un onda gravitazionale polarizzata “+” (a sinistra) e “x” (a destra), con periodo T, e che
si propaga lungo la direzione z, su un cerchio di masse in caduta libera posizionate nel piano x-y.
Dall’equazione (4.) segue che l’effetto dell’onda gravitazionale è la produzione di un allungamento
e un accorciamento della lunghezza dei bracci dell’interferometro e quindi una variazione del percorso ottico della luce. Quando le due forme d’onda ritornano al beam splitter sono quindi fuori
fase ed il fotodiodo in uscita misurerà una variazione di potenza. Se l’onda gravitazionale incidente
è periodica di periodo Ω, ed ampiezza ℎO+ P = ℎ' J-KO−MΩ+P, con frequenza dell’onda molto maggiore di quella di risonanza del pendolo Ω ≫ N' , la differenza di fase risulta
48
48
∆ =
ℎO+P =
ℎ' J "F .
Visto che la differenza di fase Δ è proporzionale alla lunghezza dei bracci dell’interferometro,
compatibilmente con i costi di realizzazione, si tenta di rendere tale dimensione la più grande possibile. I più grandi interferometri al suolo sono VIRGO e LIGO ed hanno bracci lunghi, rispettivamente, 3 e 4 Km. Se venissero attraversati da un’onda gravitazionale di ampiezza 10 (valore tipico a 10 Hz), il moto degli specchi corrispondente sarebbe dell’ordine di 10 . La debolezza di
questo segnale impone la costruzione di apparati estremamente sensibili e complessi.
I rivelatori interferometrici terrestri riescono a raggiungere sensibilità di 10
⁄√ lavorando nel
range di frequenza 10 Hz – 10000 Hz. Purtroppo questi rivelatori presentano delicati problemi,
come ad esempio la sospensione degli specchi ed il loro isolamento dal rumore. Tra le varie sorgenti di rumore, come vedremo tra breve, in particolare, si ha: il rumore sismico che limita la sensibilità a frequenze più basse dei 100 Hz; alle alte frequenze t > 500, la sensibilità è limitata
dallo shot noise; nella parte centrale della banda la perturbazione predominante è il rumore termico.
In generale, la rivelazione di onde gravitazionali al suolo richiede osservazioni congiunte da un
network di rivelatori, necessari per accrescere il livello di confidenza della rivelazione e per apportare accurate informazioni sugli altri osservabili fisici (direzione della sorgente, ampiezza e così
via). Un esempio può essere visto per i segnali impulsivi, di breve durata. In genere, se il segnale
dura per un tempo sufficientemente lungo, sia l’ampiezza che la fase dell’onda possono essere in27
fluenzate dal moto del rivelatore, che si muove e ruota con il moto della Terra. Ciò produce una
modulazione in ampiezza e fase che non è intrinseca al segnale. Invece, per segnali di breve durata, questa modulazione dovuta al moto del rivelatore non è osservabile. Il rivelatore risulta stazionario. In questo caso si ha bisogno di tre o quattro interferometri per triangolare le posizioni
dell’impulso nel cielo e trovare le due polarizzazione h+ e hx. Si ha bisogno quindi di un network di
rivelatori (13) (11).
Di seguito riportiamo una breve descrizione dei principali interferometri per onde gravitazionali
che fanno parte del network di collaborazione scientifica mondiale:
• LIGO (USA): LIGO (Laser Interferometric Gravity-Wave Observatory) è l’unione di tre interferometri, due a Hanford Reservation, vicino Seattle, con bracci lunghi rispettivamente 2 e 4 km, l’altro a Livingston Parish in Louisiana, con braccio di 4 Km. LIGO è in funzione dal 2002 ed ha raggiunto la sua sensibilità nominale nel 2006.
• GEO600 (Germania): GEO600 è una collaborazione anglo-tedesca. L’apparato sperimentale è situato ad Hannover ed i suoi bracci hanno una lunghezza di 600 m. Tra il 2002 e il
2006 ha acquisito dati in coincidenza con LIGO.
• AIGO (Australia): AIGO (Australian International Gravitational Observatory) si trova a
Gingin, in Australia. La lunghezza dei bracci è di 5 km. Lo scopo della struttura è quello di
sviluppare tecniche avanzate per migliorare la sensibilità degli interferometri per onde
gravitazionali, in particolare di LIGO. La sua posizione nell’emisfero australe migliorerà
largamente la precisione direzionale del network di rivelatori, in quanto è situato in una
posizione complementare rispetto alla disposizione degli altri interferometri.
• VIRGO (Italia): L’esperimento franco-italiano Virgo risiede a Cascina, vicino Pisa. La lunghezza dei bracci è di 3 km. Il suo funzionamento è cominciato il 22 maggio 2007. La caratteristica principale di Virgo è il suo sofisticato sistema di sospensione degli specchi
chiamato "super-attenuatore", che è composto da una serie di pendoli in cascata che
sono in grado di ridurre le vibrazioni del terreno sia in verticale che in orizzontale.
• TAMA300 (Giappone): Questo rivelatore giapponese è situato a Tokio e presenta un
braccio di 300 m. È stato il primo a raggiungere la sua sensibilità nominale ed è in funzione dal 2001.
Tutti questi rivelatori hanno differenti sensibilità, a seconda della lunghezza corrispondente dei
bracci. I più sensibili sono VIRGO e LIGO, che hanno performance simili. Grazie all’originale sistema
di isolamento sismico, VIRGO è l’unico interferometro terrestre per onde gravitazionali ad avere
come limite inferiore di sensibilità una frequenza di 10 Hz. Al di sotto di 1 Hz rumori di origine terrestre prevalgono sui segnali astronomici, in particolare i rumori sismici e quelli gravitazionali locali.
Le pulsar binarie e i buchi neri massivi sono le più promettenti sorgenti di onde gravitazionali, ma
purtroppo emettono a frequenze più basse di 1 Hz e non sono quindi rilevabili dagli interferometri
terrestri. Questo è uno dei tanti motivi che hanno avviato la progettazione e la costruzione di un
rivelatore spaziale come LISA. L’operazione nello spazio permette sia di ottenere dei bracci molto
lunghi e sia di avere un ambiente più vantaggioso: vengono infatti diminuiti i rumori del gradiente
28
gravitazionale e i disturbi esterni. Ciò apre la possibilità di realizzare osservazioni di onde gravitazionale emesse nella regione di bassa frequenza nel range tra 0.1 mHz e 0.1 Hz. L’osservazione della radiazione gravitazionale da parte di LISA sarà complementare a quella dei rivelatori a terra, in
un range di frequenza dove diversi candidati come sorgente di onde gravitazionali, sono conosciuti
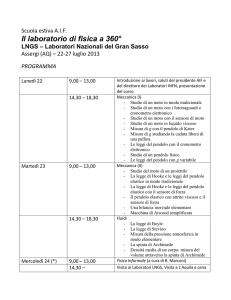
con parametri ben misurati. In Figura 5 vediamo lo spettro di frequenze delle onde gravitazionali
(2). Questo spettro conferma l’argomento qualitativo secondo il quale segnali gravitazionali a basse frequenze siano più abbondanti di quelli alle alte frequenze (dove per alte frequenze si intende
1 kHz). Ciò perché i moti delle masse a larga scala hanno tipicamente scale temporali lunghe, molto lontane dalla scala della frazione di secondo. La figura riporta indicazioni della sensibilità dei
sensori in ogni regione di frequenza: LISA ricopre un range più ampio di sorgenti rispetto a quello
compreso dalle antenne a Terra. Ciò rende LISA un progetto estremamente allettante e fornirà
l’unico mezzo di accesso a questi interessanti segnali.
Figura 5: Lo spettro in frequenza delle onde gravitazionali.
29
2.2 Le sorgenti di rumore
Le sorgenti di rumore per gli interferometri al suolo possono essere classificate come rumori
di spostamento o di fase. Il rumore di spostamento è causato dal moto effettivo degli specchi,
principalmente causato da (12):
• Eccitazione sismica del suolo;
• Campo gravitazionale stocastico generato da fluttuazioni di densità di massa, che si accoppiano direttamente agli specchi;
• Eccitazione termica delle sospensioni metalliche e degli elementi ottici;
• Fluttuazioni di pressione di radiazione.
Il rumore in fase, invece, è generato da:
• Fluttuazione dell’indice di rifrazione nei tubi dei bracci;
• Fluttuazioni in ampiezza e frequenza del fascio laser incidente;
• Shot-noise, il limite quantistico al conteggio dei fotoni.
Una volta che i principali contributi al rumore sono mantenuti sotto controllo, la sensibilità
dell’interferometro sarà determinata da tre sorgenti di rumore: termico, di fluttuazione (o shot
noise) e sismico. Per capire il modo in cui sono controllati, è importante pensare in termini di spazio delle frequenze. Le osservazioni fatte con rivelatori al suolo rientrano nel range di frequenze
tra i 10 Hz e i 10 kHz. Lo scopo del controllo dei rumori è di ridurre i disturbi entro la banda delle
misure.
2.2.1
Il rumore termico
Il rumore termico è uno dei limiti fondamentali nelle misure meccaniche. Quando si ha un sistema fisico in cui ci sono forze di dissipazione meccanica, questo è sottoposto a forze termiche
stocastiche la cui densità di potenza spettrale è data dal teorema di fluttuazione e dissipazione
ONP = 4h ~$ONP
dove $ ONP è la parte reale dell’impedenza meccanica ONP = ONP⁄q ONP alla frequenza ω.
Prendere la parte reale di questo rapporto significa considerare solo la componente della velocità
in fase con la forza applicata, assumendo che quest’ultima abbia andamento sinusoidale. Questa
forza stocastica produce un moto browniano del sistema, per cui la potenza spettrale dello spostamento causato da questo meccanismo è data dalla seguente espressione:
4h ~$ONP
-F ONP = .
N |ONP|
Nel caso di rivelatori di onde gravitazionali interferometrici, ci sono due contributi fondamentali al
rumore termico: il primo è quello associato ai modi di risonanza delle sospensioni dello specchio, il
30
secondo è il rumore termico associato ai modi normali di risonanza degli specchi. Per controllare
questo disturbo, si tiene conto del fatto che il rumore termico ha la sua massima ampiezza alla
frequenza del modo vibrazionale e, se la risonanza del modo è stretta (un fattore di qualità Q alto),
allora l’ampiezza alle alte frequenze risulta piccola. Quindi, le sospensioni del pendolo sono disegnate con frequenza di circa 1 Hz, molto al di sotto della finestra di osservazione, e le masse degli
specchi sono disegnate per avere modi principali di vibrazione al di sopra di 1 kHz. Questi sistemi
sono costruiti con alti fattori di qualità Q (10o o più) per ridurre il rumore nella banda di osservazione. Anche così, il rumore termico è tipicamente un rumore dominante al di sotto di 100 o 200
Hz (11).
Gli specchi di VIRGO, ed i super-attenuatori a cui sono sospesi, costituiscono sistemi a molti stadi
ed innumerevoli risonanze, per i quali l’analisi del rumore termico è molto complessa.
2.2.2
Il rumore sismico
Vibrazioni del suolo e meccaniche sono altre fonti di rumore che devono essere eliminate. Le
vibrazioni sismiche del suolo sono di molti ordini di grandezza superiori allo spostamento che si
vuole rilevare. L’andamento della densità spettrale lineare del rumore sismico può essere misurato
ed è più o meno la stesso in tutte le direzioni. Il suo valore è ben approssimato dalla relazione
empirica
- ~ √
)
o
dove 10 < < 10 a seconda del luogo e ν è la frequenza.
Ciò significa uno spostamento quadratico medio (rms) dell’ordine di 1 µm per frequenze
dell’ordine di 1 Hz, ovvero molti ordini di grandezza al di sopra degli spostamenti che si intendono
rivelare, per esempio, in VIRGO.
Le ottiche dell’interferometro devono pertanto essere isolate da queste vibrazioni attraverso un
sistema di attenuazione meccanica ad altissime prestazioni. L’apparato adottato in VIRGO è chiamato superattenuatore. Questo è un sistema di speciali sospensioni che costituiscono un pendolo
a molti stadi, con frequenze di risonanza contenute entro 2.5 Hz su tutti i gradi di libertà.
L’attenuazione fornita da questo apparato è dell’ordine di 10 alla frequenza di 4 Hz, e
dell’ordine di 10 alla frequenza di 10 Hz.
Il rumore sismico è più pronunciato alle basse frequenze (da 0,1 Hz a 10 Hz) e diminuisce velocemente alle alte frequenze. I livelli tipici di questo rumore sono
-OP ≃ 10 ⁄√ KJ1 < ≤ 10
10)
- O P ≃
⁄√ KJ > 10
31
2.2.3
Shot noise
La rivelazione interferometrica di onde gravitazionali consiste, come si è detto più volte, essenzialmente, in misure di differenze di fase dei fasci nei due bracci dell’interferometro. Questo
viene fatto semplicemente misurando l’intensità in uscita con sensore ottico, tipicamente un fotodiodo. Uno dei principali rumori che limitano questo tipo di misure è lo shot noise, ovvero la fluttuazione statistica del numero di fotoni che arrivano sul rivelatore. E’ un rumore quantistico dovuto al fatto che l’incertezza sul numero di fotoni che si vogliono rivelare è legata dal principio di indeterminazione all’incertezza sulla fase misurata, ∆∆ ≥ 1.
A livello quantitativo, lo shot noise determina un segnale equivalente a quello prodotto da uno
sfasamento caratterizzato dalla seguente densità spettrale lineare, costante in frequenza:
% = 2ℏN' /¢' √
Dove ¢' è la potenza del laser in ingresso, N' ⁄28 è la frequenza del laser e η l’efficienza quantica
del fotodiodo. Se si confronta questo rumore con l’ampiezza del segnale dell’onda gravitazionale,
si trova un limite minimo per il valore della densità di potenza spettrale dell’ampiezza
ℎ =
2ℏN' 1
48 /¢' √
dove si è supposto N⁄* ≪ 1.
Da ciò si vede che è possibile ridurre l’effetto dello shot noise incrementando la potenza in ingresso ¢' . Tale incremento accresce a sua volta il rumore indotto dalle fluttuazioni della pressione di
radiazione sugli specchi. Gli specchi sono soggetti ad una forza dovuta alla pressione di radiazione
che comporta una variazione in fase in uscita data dalla densità di potenza spettrale
48 √8¢ℎ
.
N *
Dalla somma dei due contributi trovati si ricava una potenza ottimale che risulta il limite quantistico alla determinazione della fase, con una potenza ¢' ≈ 1m£
∆ =
∆FF =
48 4ℏ 1
.
N /⁄
Lo shot noise è il principale limite alla sensibilità per le alte frequenze comprese tra 200 e 300 Hz.
2.3 La sensibilità
Per calcolare la potenza spettrale di rumore complessiva, come somma delle potenze spettrali
delle singole identificabili cause di rumore, è necessario che queste siano espresse in termini della
32
stessa grandezza. È utile, a questo proposito, introdurre, per ciascuna sorgente di rumore come
per il rumore complessivo, un campo gravitazionale fittizio che produca sul rivelatore un segnale
caratterizzato dalla stessa potenza spettrale.
La densità spettrale lineare ℎ OtP del campo gravitazionale equivalente al rumore complessivo è
detta curva di sensibilità. Questa è la stima del livello di rumore del rivelatore come funzione della
frequenza, ed è stimata direttamente nel dominio della frequenza senza ricostruire il segnale h(t)
nel dominio del tempo. L’apparato non è in grado di rilevare un campo gravitazionale la cui trasformata di Fourier sia ovunque inferiore a questa curva.
Figura 6: Densità spettrale lineare dei principali rumori di VIRGO.
In Figura 6 vediamo la densità spettrale lineare dei principali rumore dell’interferometro VIRGO
(14). La curva di sensibilità totale è graficata insieme alle densità spettrali di tutti i segnali simulati
associati ai processi spuri. Nel range delle basse frequenze, al di sotto dei 10 Hz, VIRGO è limitato
dal rumore termico delle sospensioni del pendolo; tra 10 e 100 Hz il rumore dominante è quello
termico dei modi interni dello specchio; alle alte frequenze il rumore limitante è lo shot noise. Invece in Figura 7 si raffigura il confronto tra le curve di sensibilità dei due rivelatori VIRGO e LIGO
(15). Sono rappresentati la curva di sensibilità totale di design dell’interferometro VIRGO e i limiti
sperimentali attuali misurati nel range 10 Hz - 10 kHz, sia del rivelatore LIGO che di VIRGO.
33
Figura 7: Curve di sensibilità totali dei rivelatori VIRGO e LIGO
34
L’antenna spaziale LISA
3 L’ANTENNA SPAZIALE LISA
L’antenna spaziale LISA (Laser Interferometer Space Antenna) è un’iniziativa congiunta
dell’European Space Agency (ESA) e della National Aeronautics and Space Administration (NASA)
per realizzare il primo osservatorio per onde gravitazionali ad alta sensibilità nello spazio. La sua
realizzazione porta il concetto di misura con un Michelson su scale più grandi e in un ambiente
molto più quieto rispetto a quello del suolo. Muovere il rivelatore nello spazio elimina i rumori sismici e i gradienti gravitazionali alle basse frequenze ed apre la ricca regione dello spettro delle
onde gravitazionali al di sotto di 1 Hz. LISA consisterà di tre spacecraft che orbitano in formazione
triangolare intorno al Sole e che agiscono come un enorme interferometro di Michelson. Questo
differirà in maniera significativa dagli interferometri a terra. A causa della curvatura terrestre, gli
interferometri terrestri hanno dimensioni dei bracci limitate a pochi chilometri di lunghezza, mentre LISA può essere milioni di volte più grande. Una maggiore lunghezza può amplificare l’effetto
delle onde gravitazionali, in questo modo, LISA, può raggiungere un’accuratezza di 10
nell’ampiezza della deformazione, misurando spostamenti dell’ordine delle frazioni di picometri.
I primi studi concettuali sulla nascita di un rivelatore per onde gravitazionali nello spazio appaiono
per la prima volta negli anni ’70. Una proposta iniziale simile a quella della missione Lisa, fu presentata alla Second International Conference on Precision Measurement and Fundamental Constants nel 1981 e al ESA Colloquium on Kilometric Optical Arrays in Space nel 1984. Nel 1985 P. L.
Bender e J. Faller proposero la prima missione basata su tre spacecraft in orbita eliocentrica,
chiamata LAGOS (Laser Antenna for Gravitational-radiation Observation in Space). Questa prima
proposta aveva molti punti in comune con la missione LISA attuale. Soltanto tra il 1993 e il 1994
studi più approfonditi furono portati avanti in Europa con il supporto dell’ESA, fino all’approdo finale alla collaborazione con la NASA e alla progettazione della missione LISA, il cui lancio è previsto
per il 2025. Prima del lancio definitivo, è prevista la missione LISA Pathfinder nel 2015 che intende
testare la tecnologia studiata per il satellite LISA.
Uno dei primi obiettivi scientifici della missione è di tracciare la storia della crescita e della fusione
dei buchi neri super-massicci e delle galassie che le ospitano. Buchi neri con masse di 10 −
10) m⊙ in sistemi binari coalescenti emettono nella banda di frequenza di LISA. Quindi il satellite
sarà capace di rintracciare queste fusioni a grandi redshift e di determinarne i parametri con alta
precisione. Un altro obiettivo consiste nell’osservazione di oggetti compatti che cadono in buchi
neri super-massicci. Osservare queste binarie compatte permetterà a LISA di determinare con alta
precisione una mappa dello spazio-tempo attorno agli oggetti massicci nei nuclei galattici e quindi
di ottenere test osservativamente quantitativi della relatività generale.
3.1 Una panoramica su LISA
Concettualmente, l’idea di realizzare un interferometro nello spazio è semplice, ma la sua realizzazione pratica richiede un’intricata fusione di tecnologia ottica, controllo e ingegneria spaziale.
Gli specchi dell’interferometro non possono semplicemente fluttuare nello spazio, essi devono essere contenuti in satelliti o spacecraft, all’interno dei quali sono in moto libero. Gli spacecraft permettono di proteggerli dai disturbi esterni, come ad esempio gli effetti delle fluttuazioni della
pressione di radiazione solare, il vento solare e i campi magnetici, con lo scopo che solo le onde
gravitazionali possano perturbare il loro moto relativo. Il sistema di controllo drag-free assicura
che gli spacecraft restino centrati sugli specchi.
L’equivalente dell’interferometro di Michelson nello spazio potrebbe essere realizzato con tre spacecraft: uno che contenga la sorgente di luce laser, il beam splitter e il rivelatore, e altri due, alla
fine dei bracci “spaziali” dell’interferometro, che alloggino i due specchi remoti. Per motivi pratici
l’implementazione di LISA è leggermente differente. Ogni satellite contiene due masse di test in
caduta libera (gli specchi dell’interferometro) a cui fanno capo due telescopi e due laser, uno per
ogni telescopio, ciascuno orientato verso uno degli altri due satelliti.
Figura 8: Schema esemplificativo della distribuzione dei tre spacecraft con la posizione delle test-mass e
dei telescopi.
Ogni spacecraft ha la forma di un cilindro appiattito, contenente una struttura a forma di “Y” i cui
bracci sottendono un angolo di 60° Figura 9. Ogni braccio contiene la stessa configurazione ottica:
36
un banco ottico, un telescopio per ricevere e trasmettere la luce e due laser (di cui uno utilizzato
come soluzione di backup). Su ogni banco ottico è assemblato il cosiddetto electrode housing, cioè
la “scatola” che ospita il principale protagonista della missione LISA: la massa di prova in caduta libera. Questa è un cubo di 46 mm formato da oro e platino in percentuale, rispettivamente, di 90 e
10, ed avente una massa di 2 kg. Questa composizione di materiale assicura un’alta riflettività ed
una suscettività magnetica minore di 3 ∙ 10o , con un momento magnetico residuo al di sotto di
0.02}I. Le superfici riflettenti delle masse di prova costituiscono gli specchi
dell’interferometro.
Figura 9: Schemi del payload, cioè dell’insieme dei componenti all’interno dello schermo termico a forma
di Y. (a) Visione tridimensionale in cui è stato rimosso lo schermo termico per consentire la vita dei costituenti interni. (b) Vista superiore (in alto) e sezione lungo la direzione di uno dei due laser (in basso). Per
ciascun ramo del payload si può osservare la massa di test e il banco ottico su cui è montato il sensore
inerziale e tutte le componenti ottiche.
L’electrode housing ospita il Sensore Inerziale o Gravitational Reference Sensor (GRS), che misura
la posizione relativa della test-mass rispetto allo spacecraft e fornisce quindi i segnali per il sistema
di controllo drag-free del satellite. Questo sensore presenta una sospensione elettrostatica della
test-mass a tre assi, con un sensore capacitivo per la posizione. Ogni massa fluttuerà all’interno del
suo alloggio, senza alcun contatto meccanico. E’ richiesta una risoluzione di 10 ⁄√ (16) per
limitare i disturbi indotti dai moti relativi tra spacecraft e test-mass: per esempio i disturbi dovuti
all’auto-gravità dello spacecraft o alla carica della test-mass.
Poiché le due test-mass formano tra di loro un angolo di 60°, le posizioni relative tra le masse di
prova e lo spacecraft possono essere ottenute soltanto attraverso il movimento congiunto dello
spacecraft e delle masse. La correzione della posizione nella direzione dell’asse ottico è ottenuta
muovendo lo spacecraft per mezzo di speciali micro propulsori che permettono al satellite di allinearsi con la massa in caduta libera lungo quel grado di libertà. Questi propulsori sono detti FEEP
(Field-Effect Electrical Propulsion) e rappresentano una vera e propria sfida tecnologica: sono mi37
cro propulsori a emissione ionica in grado di esercitare sullo spacecraft forze dell’ordine dei micronewton.
Lungo i gradi di libertà trasversali, il riadattamento della posizione è ottenuto applicando delle forze elettrostatiche sulle masse di prova: infatti all’interno dell’electrode housing sono montati degli
attuatori elettrostatici che permettono di muovere ogni singola test-mass nella direzione ortogonale a quella del braccio dell’interferometro. Entrambi questi dispositivi sono gestiti dal GRS, che ci
permette quindi di mantenere la posizione tra lo spacecraft e le masse di prova quanto più stazionaria possibile.
All’interno dell’electrode housing è anche montato un dispositivo UV flash lamps, usato per liberare le masse da cariche nette depositate dai raggi cosmici ed altri agenti. Il principio di funzionamento prevede l’illuminazione delle masse da parte di lampade UV in modo che la carica totale
sulla massa sia ridotta tramite l’effetto fotoelettrico provocato dalla radiazione incidente (17).
Figura 10: Raffigurazione dello schema del sensore inerziale posto nel banco ottico.
Non potendo sfruttare la semplice riflessione dei fasci laser tra un satellite e l’altro come in un tradizionale interferometro di Michelson, in quanto la potenza riflessa non è sufficiente, il segnale
viene rigenerato ad ogni riflessione. La luce laser diretta verso il satellite opposto non viene riflessa direttamente, ma prima amplificata a causa della divergenza del fascio dovuta alla enorme distanza percorsa dalla luce. Infatti il raggio iniziale del fascio laser che è dell’ordine dei centimetri, si
trasforma in un valore di circa 20 km dopo aver percorso i 5 ∙ 10o h del braccio
dell’interferometro.
Una stima può essere facilmente ottenuta dalla formula che descrive la propagazione dei fasci
gaussiani (18). Se ' = 30* è il raggio iniziale del fascio, corrispondente al diametro del telesco38
pio, ed L e λ sono, rispettivamente, la distanza percorsa e la lunghezza d’onda del laser, allora il
raggio del fascio in corrispondenza dello spacecraft opposto è dato da
'
= 2 ¤ ∙ ¥1 + ^
`
¦§
≅ 25h.
4
8 ∙ ' ⁄4
Quindi solo una piccola frazione della potenza iniziale, 8O' ⁄2P ⁄8O⁄2P ≈ 10' , raggiunge
l’altro spacecraft. Questo vuol dire che se la potenza iniziale è di 1W, soltanto 100 pW arrivano a
destinazione. Per questo sul satellite opposto è presente un secondo laser in grado di ritrasmettere, con la potenza iniziale, un fascio in fase con quello riflesso dalla test-mass. Una volta arrivato
allo spacecraft iniziale, il fascio viene riflesso dalla test-mass e confrontato con la luce originale del
laser. La differenza di fase tra i due fasci fornisce informazioni sulla variazione di lunghezza del
braccio dell’interferometro. La stessa procedura viene poi ripetuta anche per gli altri bracci comparando poi le misure di fase per determinare il rumore in frequenza del laser.
La luce di ogni laser è phase locked, cioè i modi di risonanza della cavità sono fissati in fase. Ciò
viene effettuato o rispetto al laser compagno che si trova sullo stesso spacecraft, in modo da formare l’equivalente di un beamsplitter, o rispetto alla luce che proviene da uno spacecraft distante,
in modo da formare l’equivalente di uno specchio che amplifica o di un transponder per la luce. In
due satelliti, verranno agganciati in fase i laser dei due bracci corrispondenti, realizzando così due
interferometri di Michelson con un braccio in comune.
La configurazione di LISA consiste, quindi, di tre spacecraft in orbita eliocentrica, che formano un
triangolo equilatero di 5 ∙ 10o h di lato. Tale distanza è stata scelta per ottimizzare la sensibilità
di LISA alle frequenze di sorgenti conosciute e attese. Una lunghezza maggiore comprometterebbe
la sensibilità ad alte frequenze, perché la luce nei bracci risentirebbe più della metà del periodo
dell’onda gravitazionale. Un interferometro più corto di 5 ∙ 10o h inizierebbe a perdere sorgenti
interessanti a bassa frequenza come i buchi neri super-massicci.
Non esiste alcun sistema in grado di mantenere fissa a 5 milioni di km la lunghezza dei bracci
dell’interferometro di LISA. Gli spacecraft saranno principalmente guidati dal campo gravitazionale
interplanetario, quindi dal campo del Sole e da quello degli altri corpi del Sistema Solare. LISA sarà
in grado di rilevare variazioni di distanza tra due spacecraft con una precisione di 10 . Il principale problema che si presenta, allora, è se, delle misure così precise, siano compatibili con le leggi della meccanica celeste che governano il moto degli spacecraft. Studi di meccanica celeste hanno mostrato che esiste una configurazione ottimale dei satelliti: le orbite individuali dei tre spacecraft hanno inclinazione ed eccentricità tali che ognuno di essi ruota su un cerchio che unisce i vertici di un triangolo gigante, tiltato di 60° rispetto all’eclittica. La costellazione dei tre spacecraft
ruota in senso orario intorno al suo baricentro con un periodo di un anno. Il centro di questa costellazione triangolare si muove su un orbita attorno al Sole, simile a quella della Terra, con raggio
di 1 AU, ma 20° dietro di essa. Questi corrispondono ad una distanza di 50 milioni di km, necessari
per minimizzare i disturbi gravitazionali (16).
39
Figura 11: Le orbite dei tre spacecraft di LISA. I lati del triangolo sono scalati di un fattore dieci.
Figura 12: Orbita dei tre satelliti intorno al Sole. Il centro del triangolo insegue la Terra lungo la sua orbita, mentre il triangolo ruota in senso orario intorno al suo centro con periodo di un anno.
Sebbene questa sia l’orbita più stabile, nel senso che mantiene al meglio la forma triangolare della
costellazione di spacecrafts, questa forma è ben lontana dall’essere costante: le lunghezze dei
bracci cambiano, così come gli angoli tra i bracci stessi; conseguentemente i satelliti si muoveranno avanti e indietro gli uni rispetto agli altri. Questi cambiamenti non sono trascurabili: le differenze di lunghezza dei bracci subiscono delle variazioni (picco-picco) di circa 120000 Km, e le velocità
relative possono raggiungere valori di ±15 h⁄, mentre gli angoli tra due bracci contigui possono variare fino ad un grado.
Ci si chiede quindi come siano possibili misure dell’ordine del picometro in un sistema che subisce
drifts di migliaia di Km. La risposta a questa domanda è che noi siamo interessati a variazioni di
lunghezza su di un tempo scala di ore, a cui corrispondono le frequenze dei mHz. I grafici in Figura
40
13 invece mostrano che i cambiamenti orbitali avvengono su tempi scala di mesi, ben lontani dalla
frequenza dei segnali gravitazionali a cui siamo interessati (2).
Figura 13: Variazioni della velocità relativa tre gli spacecraft e differenze tra le lunghezze dei bracci su un
periodo di 10 anni, molto più della durata prevista per la missione LISA.
3.2 Sorgenti di segnale per LISA
LISA sarà sensibile nella banda di frequenze tra 10 − 10 , una banda in cui l’Universo è
popolato, come si è visto, di forti sorgenti di onde gravitazionali. Esistono differenti sorgenti astrofisiche che corrispondono a questo range spettrale ed ognuna emette onde con una differente caratteristica spettrale. Le più importanti possono essere divise in tre famiglie: background stocastico, sorgenti periodiche (binarie galattiche) e coalescenza di buchi neri super-massicci (o chirping
surces).
41
3.2.1
Sorgenti stocastiche
Le sorgenti stocastiche sono di origine cosmologica e provengono dalle fluttuazioni primordiali
della metrica dello spazio-tempo, parametricamente amplificate dall’inflazione. In unità di densità
di energia queste onde hanno uno spettro piatto su una banda estremamente larga, il cui range va
approssimativamente da 10o a 10' . Il limite inferiore di questa scala corrisponde
all’inverso della scala di Hubble, quando l’Universo iniziò ad essere dominato dalla materia; al di
sotto di questa frequenza, lo spettro va come t . Il limite superiore dello spettro è dovuto invece
alla fine dell’inflazione, quando l’universo entra nella fase calda dominata dalla radiazione. Quello
che rende particolarmente eccitante la rivelazione di queste onde è che il livello del loro spettro è
fissato dal potenziale che genera l’inflazione. Quindi, misurando queste onde, riusciremo ad esaminare direttamente la fisica inflazionaria. Sfortunatamente, queste onde hanno un’ampiezza così
piccola che la diretta rivelazione da parte di LISA è completamente fuori portata. Infatti LISA dovrebbe rivelare un background di onde che generano spostamenti di ~10 , e quindi almeno 4 o
5 ordini di grandezza al di sopra del background stocastico.
3.2.2
Binarie galattiche
Le binarie con periodi orbitali al di sotto di poche ore, emettono radiazione gravitazionale nella banda di LISA. Il loro segnale è debole rispetto a quello delle binarie galattiche di buchi neri, ma
il loro numero è estremamente alto nella nostra Galassia e nei dintorni solari. Tra queste binarie
c’è un numero di sistemi conosciuti che sono scelti come sistemi binari di verifica.
Dall’osservazione del loro spettro elettromagnetico si conosce, con buona precisione, il loro periodo orbitale, posizione e distanza dalla Terra. Queste sorgenti garantite appariranno nei dati di LISA
con segnali predicibili e riconosciuti, permettendo così la verifica delle performance del rivelatore.
Diversi studi hanno mostrato che nella banda a bassa frequenza di LISA il numero di sistemi binari
rivelabili è così alto che essi formano un confuso background, nel quale le singole sorgenti non sono identificabili (10). Il background delle binarie galattiche deve essere quindi trattato come un vero e proprio rumore, in quanto può mascherare i segnali più interessanti prodotti dai sistemi binari
di buchi neri super-massicci, che emettono nella stessa banda di frequenza. Tuttavia, il background
delle binarie può fornirci preziose informazioni sulla popolazione stellare e sul suo sviluppo.
L’irraggiamento gravitazionale delle binarie galattiche si traduce in una perdita di energia e di
momento cinetico che porta alla circolarizzazione delle orbite e soprattutto alla decrescita dei loro
raggi: si ha dunque un movimento a spirale discendente verso il centro, che provoca una riduzione
del periodo orbitale e un aumento della frequenza producendo il caratteristico chirp già visto in
sezione 1.5.2 (10):
42
48
}m
O28tP⁄
58
dove µ è la massa ridotta e M la massa totale.
Le masse delle binarie che vengono prese in considerazione vanno da 1m⨀ a 100m⨀ , con un periodo orbitale compreso tra i 100 e i 10000 secondi. Con queste masse e frequenze, il chirp è molto lento, così che la frequenza rimane pressoché costante per tutta la durata della missione spaziale. Queste sorgenti possono essere quindi considerate periodiche a meno che non si passi nella
banda di LISA a frequenze t ≥ 10, dove gli effetti dovuti al chirping sono più evidenti.
t© =
3.2.3
Chirping sources
Le chirping sources, come già detto, sono sorgenti che emettono dei segnali quasi-sinusoidali,
la cui ampiezza e frequenza aumenta rapidamente. La frequenza attraversa la banda di LISA solo
se le masse in gioco sono grandi, cioè se il sistema binario è composto da buchi neri super-massicci
(MBH) la cui massa totale è 10 − 10) m⨀ con un rapporto di massa di 1/20 – 1 (10). Dei siffatti sistemi spaziano nella banda di LISA per un periodo che va dai pochi mesi a qualche anno, e costituiscono le più importanti sorgenti per l’interferometro.
I buchi neri binari hanno origine con ampie orbite a basse frequenze. Quando perdono energia, la
loro frequenza cresce e la loro radiazione si rafforza. Una sorgente tipica entra nella banda di rilevazione di LISA un anno o più prima del merger finale, così che molte orbite possono essere osservate raccogliendo dettagli sulle proprietà del sistema e i suoi comportamenti, la posizione nel cielo
e la distanza assoluta. La fase coerente e l’informazione sulla polarizzazione ottenute sulla baseline
dell’orbita solare di LISA, possono aiutare a localizzare dove si trovi la sorgente nel cielo al meglio
di un grado. Alla luminosità di picco, poco prima del momento del merger, una binaria di buchi neri è la più estrema trasformazione tra massa e energia dell’Universo, ed irradia una potenza di
≈ 10
* ⁄9 (o ~10 £), in pochi cicli, per un periodo di circa 100 9m ⁄* (19). Lo studio dettagliato delle forme d’onda dalle binarie di buchi neri rappresenta un considerevole banco di prova
per la relatività generale.
LISA può misurare anche la distanza dei sistemi binari le cui orbite producono un chirp. Si può vedere (1) che per le orbite delle binarie l’ampiezza si può esprimere come
* O9mNP
*
ℎ∼
~ N *
N [ dove ω (frequenza angolare) e τGW (tempo scala su cui varia l’orbita a causa della perdita di energia) sono degli osservabili. Quindi una determinazione dell’ampiezza h è sufficiente per individuare
la distanza della binaria.
43
In Figura 14 vediamo i limiti corrispondenti alle frequenze attese dalle sorgenti astrofisiche rilevabili da LISA (1). Le due linee più spesse inquadrano le sorgenti accessibili dallo spazio alle frequenze delle onde gravitazionali di 10 e 1. Queste seguono la formula t = O9m⁄$ P⁄ ⁄8.
La linea dei buchi neri (black hole line) segue $ = 29m⁄* ; se la relatività generale è corretta, non
ci sono sistemi al di sotto di questa linea. La linea dei chirp (chirp line) mostra il limite superiore
per i sistemi binari le cui frequenze orbitali cambiano di una quantità misurabile O3 ∙ 10 P in
un anno, a causa dell’emissione di energia gravitazionale. Ogni binaria di massa totale M e separazione orbitale R si troverà al di sotto di questa linea e emetterà un segnale chirp nella banda di LISA permettendo la misura della sua distanza. La curva indicata con “binary lifetime = 1 yr” è il limite superiore alle binarie che hanno un chirp così forte che subiscono un processo di coalescenza
nel limite delle osservazioni di LISA. Nella zona di masse più basse nel range di LISA, si trovano il
Sole e le binarie di stelle di neutroni di breve periodo che ci si aspetta di poter osservare, che sono
sulla linea dei chirp ma non sulla linea del tempo di vita di un anno. Accanto al limite superiore di
massa, è illustrato il burst dovuto alla formazione di un buco nero di 10o m⨀ . La linea verticale è il
chirp dei sistemi binari di buchi neri di 10o m⨀ .
I rivelatori al suolo operano solo nel range di masse tra la linea t = 1 e la linea dei buchi neri.
Figura 14: Diagramma massa-raggio delle sorgenti la cui frequenza dinamica naturale è nella banda di LISA.
44
3.3 Sorgenti di rumore e sensibilità di LISA
La sensibilità dell’interferometro LISA è determinata da due caratteristiche concorrenti: la risposta, cioè il segnale di uscita dell’interferometro ad una data onda gravitazionale di intensità h, e
l’effetto delle varie sorgenti di rumore che simulano il segnale dell’onda. Specificheremo la relazione tra i due effetti in termini di sensibilità e rapporto segnale-rumore.
Il rapporto segnale-rumore dipenderà da una moltitudine di proprietà del segnale atteso, come le
caratteristiche del rumore, la durata della misura ecc. Nella pratica si specifica un rapporto segnale-rumore di 5 su un tempo di misura generalmente di un anno, che è il più lungo possibile rispetto
al tempo di vita di LISA. Questo rapporto rappresenta un livello di confidenza: durante un anno di
osservazione, la probabilità che un rumore gaussiano oscilli mimando una sorgente con deviazione
standard pari a 5, durante la ricerca di LISA di sorgenti in tutto il campo del cielo, è minore di 10,
così che si può essere confidenti che ogni sorgente al di sotto di questa soglia possa essere effettivamente rilevata.
La sensibilità di LISA è determinata da una varietà di sorgenti di rumore e dal grado in cui queste
possono essere ridotte. Ci sono due principali categorie in cui distinguiamo gli effetti del rumore:
• Le fluttuazioni nella lunghezza del percorso ottico, che chiameremo rumori del percorso
ottico. Questa categoria di disturbi include lo shot noise e le instabilità del fascio di puntamento. Questi contributi in genere sono scorrelati tra loro.
• La seconda categoria è dovuta alle forze (o accelerazioni) che agiscono sulle masse di
prova. Questi sono detti rumori di accelerazione e comporteranno errori di spostamento
ª sulle masse di prova.
fIn Figura 15 è rappresentata la curva di sensibilità di LISA. Si nota come questa sia limitata alle basse frequenze dal rumore di accelerazione delle masse di prova, dovuto alle forze spurie che perturbano il loro moto geodetico nominale. La stima attuale dà una densità di potenza spettrale di
un rumore bianco con una pendenza di 1⁄t .
45
Figura 15: Curva di sensibilità di LISA espressa in termini dell’ampiezza h. La curva è stata ottenuta integrando su di un anno di osservazione, con un rapporto segnale-rumore di 5. Il grafico è stato ottenuto
usando il LISA sensitivity Curve Generator (20).
Alle frequenze più alte è dominante il rumore di posizione, essenzialmente dovuto allo shot noise
del laser. Oltre questo limite la sensibilità inizia a degradarsi e si ha un taglio dovuto alla funzione
di trasferimento dell’antenna. Ciò avviene per periodi delle onde gravitazionali superiori al tempo
di andata e ritorno del laser lungo il braccio dell’interferometro, oltre il quale l’ampiezza dell’onda
cambia segno e inizia ad invertire la sua azione sul braccio.
Vediamo in maniera più precisa le diverse componenti del rumore.
3.3.1
Shot noise
Come si è accennato in precedenza, i laser associati a ciascun telescopio hanno una potenza
iniziale di 1 W. Tenendo conto dell’apertura dei telescopi « = 0.3, dopo = 5 ∙ 10o h, la potenza raccolta è data da (1):
«
¢b = ¢,
2 cioè vengono raccolti soltanto 100 pW dal satellite opposto. Questo basso livello di potenza genera lo shot noise, che produce l’appiattimento della parte centrale della curva di sensibilità. Il suo
ª inversamente proporzionale alla radice
effetto è quello di generare una differenza di cammino f
quadrata della potenza luminosa ricevuta ¢b
46
ℏ*
.
28 ¢b
Lo shot noise pone un limite alla più piccola variazione di lunghezza rilevabile in un singolo braccio
di
ª Ot Pr =
¬­® Ot P ≔ pf
¬­®
= ⁄
ℏ*
ℏ* = ≈ 10 K⁄√.
28 ¢b
48 ¢/ « con / ≃ 0.3 efficienza delle ottiche e del fotodiodo (1).
3.3.2
Rumori di accelerazione
A frequenze al di sotto di 1 mHz, il rumore è principalmente dovuto alle componenti di accelerazione sulle test mass che non possono essere schermate neanche dallo schema di controllo dragfree. Queste sono forze dovute: alle variazioni di temperatura, che cambiano la distanza reciproca
delle test mass; al deposito di cariche sulle test mass dovute ai raggi cosmici; ai gas residui
all’interno dell’electrode housing.
In particolare, alle basse frequenze ci sono forze di spostamento che perturbano le masse dal loro
moto geodetico. Nell’approssimazione di campo debole e nel limite di grandi lunghezze d’onda del
segnale gravitazionale, le variazioni di distanza nel tempo L(t) tra due masse di prova di LISA soddisfano la seguente equazione:
A ° O+P
A ℎ
6.
=
+
,
A+
A+
dove h(t) è l’ampiezza dell’onda gravitazionale, e m è la massa delle test mass (2 kg). Il termine
° O+P è la forza differenziale che agisce sulle test mass lungo l’asse x, di origine non gravitazionale
o dovuta a sorgenti di campo gravitazionale locale. Questa genera un’accelerazione spuria
° O+P⁄. Se passiamo al dominio delle frequenze f, otteniamo lo spettro di potenza (Power Spectral Density o PSD, si veda in appendice A) del rumore di accelerazione ±° O+P⁄. Secondo
l’equazione (6.), l’acceleration noise produce un rumore in termini di spostamento -OtP lungo x, il
cui effetto può mascherare il passaggio di un’onda gravitazionale, ed è espresso da:
° OtP 1 1
- Ot P =
.
O28t P Come si vede, questo rumore è dominante a basse frequenze essendo inversamente proporzionale a t . Questo è vero anche se assumiamo un disturbo ° indipendente dalla frequenza.
Tenendo conto della lunghezza del braccio dell’interferometro = 5 ∙ 10 , per ottenere la sensibilità di LISA, la PSD del rumore in accelerazione del sistema in caduta libera deve soddisfare il
seguente upper limit:
47
7.
° OtP
t
≤ 3 ∙ 10 × ²1 + e
g ³
.
3
√
Per permettere a LISA di osservare le più interessanti sorgenti a bassa frequenza, è necessario che
le masse di prova si trovino il più possibile in condizioni di puro moto geodetico e che lo spacecraft
le segua nella direzione di massima sensibilità, quella dei fasci laser. Il rumore si deve tenere al di
sotto di 3 ∙ 10 ⁄ √ per frequenze inferiori ai 3mHz (21), per ogni massa di test a bordo
dei satelliti, lungo le direzioni dei fasci laser.
La Figura 16 mostra come differenti valori del rumore d’accelerazione influiscono sulla curva di
sensibilità di LISA, e come questo influisce sulla rivelazione di sorgenti a bassa frequenza.
Figura 16: Curva di sensibilità di LISA calcolata per differenti valori di accelerazione residua delle testmass, per un anno di integrazione e con un rapporto segnale rumore pari a 5 (20). La linea tratteggiata
blu rappresenta il rumore dovuto al background dei sistemi binari non risolti.
Sotto il mHz i contributi principali al rumore di accelerazione possono essere così classificati:
• Variazioni del gradiente gravitazionale: Le test-mass ospitate dagli spacecraft di LISA, sono
soggette al campo gravitazionale generato dalle masse che costituiscono i satelliti. Queste
masse subiranno piccoli cambiamenti nelle loro posizioni, dovuti ad esempio a variazioni
della distribuzione di temperatura. Queste distorsioni termiche degli spacecraft sono attualmente uno delle più prominenti sorgenti dell’acceleration noise. Calcoli elaborati sono
stati effettuati osservando gli effetti delle variazioni della radiazione solare, o studiando il
comportamento termico degli spacecraft, ed i risultati sembrano in accordo con i requisiti
di LISA (16).
• Rumore dovuto al caricamento della test-mass: A causa della radiazione cosmica le testmass possono acquistare una certa quantità di carica elettrica che genera rumore. Queste
cariche daranno vita a delle forze di attrazione elettrostatica verso le pareti dell’electrode
48
housing, che, se non sono perfettamente schermate, saranno soggette alla forza di Lorentz
dovuta al moto di LISA nel campo magnetico interplanetario. Verosimilmente, ogni cambiamento di questo campo magnetico produrrà delle forze sulle test-mass. É evidente
quindi che uno schermaggio passivo non è sufficiente a proteggere le test-mass dagli effetti
di carica. L’accumulo di carica deve essere quindi monitorato, e continuamente eliminato
attraverso dei lampi di luce UV inviati sulla test mass (2) (17).
• Rumore dovuto ai gas residui: Un largo contributo al rumore di accelerazione è dato dai gas
residui all’interno del sensore. Sebbene all’interno dell’electrode housing si raggiunga un
vuoto molto spinto, 10 ´ = 10o ¢, le test-mass saranno soggette a diverse e non
trascurabili accelerazioni. Principalmente, si ha l’effetto del rumore stocastico dovuto ai
continui urti della test-mass con le molecole del gas residuo. Questo rumore statistico è
proporzionale alla radice quadrata della pressione del gas, p. Quindi nel caso in cui il sensore acquisti un gradiente di temperatura dovuto, ad esempio, alla variazione della radiazione solare o a dissipazioni di potenza nell’elettronica dello spacecraft, si genereranno delle
variazioni di pressione del gas all’interno del sensore delle quali bisognerà tener conto.
Il livello di rumore totale che si vuole raggiungere è di ¬µ ≈ 4 ∙ 10 1⁄√ a circa 3mHz, che
in termini di ampiezza è ℎ ≈ 3 ∙ 10 per un anno di presa dati. Il rumore in termini di differenza
ª ≈ 40 ∙ 10 ⁄√ nel range di maggiore sensibilità
di cammino risulta essere dell’ordine di f
⁄
di LISA.
3.4 Time Delay Interferometry
I segnali che provengono da un singolo braccio dell’interferometro di LISA possano essere
combinati ed elaborati in maniera molto diversa rispetto agli interferometri al suolo. Nei rivelatori
al suolo, la luce del laser risente dello stesso ritardo in ogni braccio dell’interferometro, a causa
dell’uguaglianza della lunghezza dei bracci. Così i rumori in fase o frequenza del laser sono cancellati quando arrivano al foto rivelatore, permettendo la misura di fase molti ordini di grandezza al di
sotto della stabilità intrinseca del laser stesso. Se ciò non accadesse la rivelazione sarebbe impossibile perché il rumore naturale del laser è molti ordini di grandezza più grande di tutti gli altri rumori. Al contrario dei rivelatori al suolo, è impossibile mantenere i bracci di un interferometro spaziale della stessa lunghezza. La lunghezza dei bracci di LISA può differire di qualche percento. Le
fluttuazioni della fase del laser risentono, quindi, di svariati ritardi lungo ogni braccio. Così su ogni
spacecraft due segnali che arrivano da due differenti bracci, non possono essere ricombinati direttamente per ottenere la cancellazione del rumore del laser.
49
Il rumore di fase si verifica ogni volta che si ha una differenza statica nel percorso ottico del fascio
laser nel viaggio tra i due spacecraft. L’intensità del rumore dipende dalla stabilità della frequenza
del laser: se la frequenza fluttua di ft e la lunghezza relativa dei bracci differisce di Δ, la variazione di percorso ottico f- è data al primo ordine da:
ft
f- =
Δ.
t
Per LISA si è considerato un laser infrarosso molto stabile O = 1.064}P, con una stabilità in fase
di una parte in 10
per radice di Hertz, ovvero ¬
⁄
≃ 30 ⁄√ (2). Poiché si desidera effet-
tuare rivelazioni interferometriche dell’ordine del picometro, le variazioni di lunghezza che si possono tollerare sono ∆ < 200. Ma, come si è visto, LISA subirà variazioni molto maggiori. Tale
problema viene risolto con la Time Delay Interferometry (TDI), una tecnica di post-processing adatta a rimuovere il rumore in frequenza dai dati dell’interferometro. Questa correzione non è implementata nell’hardware, ma esclusivamente nel software. La tecnica TDI compone tra loro combinazioni lineari delle misure di fase che sono libere dal rumore in frequenza del laser. Questa tecnica sfrutta il vantaggio per cui il rumore in frequenza del laser entra in ogni misura con una funzione di trasferimento conosciuta, che dipende solo dal tempo di viaggio della luce nel braccio di
LISA. Il segnale gravitazionale vi entra, invece, con una diversa funzione di trasferimento, permettendo al rumore in frequenza di essere cancellato senza eliminare le informazioni sull’onda gravitazionale.
Vediamo in maniera semplificata il concetto su cui si basa questa tecnica, rimandando alla review
(22) per una trattazione più specifica.
Sia O+P la fase del laser che entra nel beam splitter prima che la luce sia distribuita ai due bracci
di LISA, che hanno lunghezze L1 e L2, rispettivamente. Siano ¶ O+P e ¶ O+P le letture di fase al beam
splitter dopo che la luce è tornata indietro da ogni braccio. Si ha:
¶ O+P = O+ − 2 ⁄* P − O+P + · O+P + O+P
¶ O+P = O+ − 2 ⁄*P − O+P + · O+P + O+P
Dove · O+P e · O+P sono gli spostamenti in fase, mentre O+P e O+P sono gli altri contributi al
rumore, non dovuti al jitter casuale della frequenza. Quest’ultimo contributo può essere rinchiuso
in O+P. Si può definire la seguente variabile TDI:
¸O+P = L¶ O+P − ¶ O+PQ + L¶ O+ − 2 ⁄*P − ¶ O+ − 2 ⁄* PQ
8.
dove i ritardi temporali sono stati adeguatamente scelti per cancellare gli effetti del rumore in frequenza. Ciò di sicuro è basato sul fatto che le fluttuazioni in frequenza del laser entrano in
L¶ O+ P − ¶ O+PQ e in L¶ O+ − 2 ⁄*P − ¶ O+ − 2⁄* PQ con la stessa dipendenza dal tempo. In Figura 17 è mostrato lo schema concettuale di come questa variabile TDI cancella il rumore in frequenza. Ci sono molte altre variabili TDI che cancellano le varie componenti di rumore presenti. La
filosofia più comune è che esse siano state generate dalle combinazioni lineare di letture interferometriche adeguatamente spostate in fase (2).
50
Figura 17: Modello della variabile TDI dell’equazione (8.): il rumore in frequenza è proporzionale alla differenza tra le lunghezze dei fasci blu e rossi.
3.5 LISA Pathfinder
Durante i vari studi sull’antenna spaziale LISA, si è sentito il bisogno di una missione dimostrativa della nuova tecnologia drag-free progettata per mantenere in caduta libera le masse di prova.
Per ridurre i rischi della missione LISA, l’European Space Agency (ESA) ha riservato la missione tecnologica SMART-2 (Small Mission for Advanced Research Technology number 2) al test di questa
tecnologia. Il sistema è denominato LISA Technology Package (LTP) ed è una versione compatta del
satellite LISA, in orbita nel punto lagrangiano L1 del sistema Terra-Sole. L’idea è quella di ridurre la
lunghezza di uno dei bracci di LISA a circa 30 centimetri in modo da poterlo ospitare su un unico
satellite.
Figura 18: Schema di principio del LISA Technology Package: si vedono le due masse di prova e il banco
ottico. Un interferometro con uno dei bracci compreso fra le due masse di prova ne misura la distanza.
51
All’interno saranno presenti due test-mass in caduta libera identiche a quelle che voleranno nella
missione LISA, ognuna nel suo electrode housing, senza contatti meccanici con questo, e un interferometro laser di alta precisione, a bassa frequenza, che ne legge la posizione relativa, come si
vede in Figura 18.
Il LISA PF sarà equipaggiato, quindi, con gli elementi principali della tecnologia di LISA:
• Il sistema di controllo dello spacecraft basato sui FEEP (Field Emission Propulsion thruster).
• Il Gravitational Reference Sensor (GRS).
• L’interferometro a bassa frequenza.
• Il meccanismo di bloccaggio delle test-mass usato al momento del lancio e che le rilascia
nella fase di misura.
• L’apparato che controlla e rimuova la carica accumulata sulle test-mass dovuta
all’esposizione ai raggi cosmici.
Questo schema vuole essere un esperimento ideale di Einstein di spostamento geodetico, con una
separazione trascurabile tra le due masse di prova, che annulla l’effetto della curvatura e delle
perturbazioni gravitazionali.
Nella configurazione base, le due masse sono circondate dagli elettrodi del sensore di posizione.
Le informazioni di posizione ricavate sono mandate al sistema di controllo drag-free, che le elabora e comanda l’attuazione elettrostatica e i propulsori dello spacecraft, per mantenerlo centrato
rispetto ad un punto di riferimento. Il moto relativo delle due masse è seguito dall’interferometro
laser, che ha una risoluzione del picometro sulla misura del loro spostamento,
Δ- ≤ 10 ⁄√, al di sotto di 3 mHz, in un range dinamico di un millimetro. Scopo di questa
missione è di mostrare come l’accelerazione parassita relativa delle test-mass, a frequenza di circa
1 mHz, sia di due ordini di grandezza più piccola rispetto ad ogni passato esperimento.
Tutto ciò permette di non perdere il requisito principale della missione: mantenere la massa di
prova in moto geodetico. In questa configurazione, lo spacecraft segue una delle due test-mass secondo le informazioni provenienti dal sensore di posizione. La seconda massa è invece forzata a
seguire la prima tramite l’attuazione elettrostatica procurata dal GRS.
Il test di volo del LTP sullo SMART-2 è considerato soddisfacente se si dimostra la caduta libera di
una test-mass entro
¹
t
1
¬D OtP ≤ 3 ∙ 10 ²1 + e
g ³ 3
√
nella banda delle misure 1 ≤ t ≤ 30 (21), cioè entro un ordine di grandezza rispetto al
requisito di LISA, nell’equazione (7.). Ogni accelerazione residua di origine fisica sconosciuta deve
essere al di sotto di questi limite.
I vari test che verranno effettuati con LTP sono: collaudare i propulsori elettrici in grado di produrre forze del micro-newton sulle masse; il sistema di bloccaggio ed il meccanismo di rilascio delle
masse di prova; il sistema di scarica UV della carica elettrica netta sulle masse; la resistenza dei diversi strumenti e hardware in ambiente spaziale; misure indipendenti del livello di rumore imposto
%⁄C ⁄mN
º
; misure indipendenti delle forze di fluttuazioni intrinseche t"F ⁄; misure del cross52
talk intrinseco del sensore e dei disallineamenti dei propulsori; test dell’allineamento del fascio
tramite la rotazione delle test-mass.
Questi test possono essere affiancati da un insieme di esperimenti volti a consolidare il modello di
rumore, come misure di sensibilità ai campi magnetici, alle fluttuazioni di potenza, ai gradienti
termici e ai rumore gravitazionali.
Figura 19: Il grafico a sinistra mostra il livello di rumore di accelerazione richiesto per LISA Pathfinder e
per LISA (3). La linea indicata come LPF CBE mostra la Current Base Estimate delle prestazioni aspettate
per la missione. La gap tra la linea LPF CBE e le prestazioni di LISA rappresenta l’estrapolazione richiesta
per trasferire la tecnologia del LPF a LISA. Nel grafico di destra si mostra il livello richiesto di rumore di
spostamento. La prestazione richieste per il LISA Pathfinder per la lettura dell’interferometro è approssimativamente uguale a quella dell’interferometro di LISA. La linea indicata con LPF CBE è la prestazione
misurata dell’interferometro (banco ottico, laser, misuratore di fase).
53
Il Gravitational Reference Sensor
4 IL GRAVITATIONAL REFERENCE SENSOR
Scopo fondamentale del LISA PF è verificare il moto di caduta libera delle test-mass cercando
di minimizzare la loro accelerazione residua rispetto al sistema di riferimento localmente inerziale.
Obiettivo del Gravitational Reference Sensor (GRS), come si è detto, è di misurare lo spostamento
dello spacecraft rispetto alle masse di prova, ricavando il segnale richiesto al loop di controllo
drag-free per riaggiustare la posizione relativa, applicando delle forze estremamente piccole. La
posizione del satellite rispetto alla test-mass non deve variare troppo velocemente per non introdurre forze spurie dipendenti dalla distanza relativa.
La soluzione scelta per il controllo drag-free del satellite è un sensore capacitivo, che è stato sviluppato e testato, su un pendolo di torsione a quattro masse, dal gruppo dell’Università di Trento.
Questo costituisce il punto di riferimento del sensore inerziale che volerà sul LISA Pathfinder per la
dimostrazione tecnologica nello spazio.
In base agli obiettivi ambiziosi che si propone la missione, i primi test al suolo hanno dimostrato la
possibilità di raggiungere il moto in caduta libera due ordini di grandezza peggio del limite del rumore di accelerazione previsto per LISA. La facility del pendolo di torsione è stata usata con successo per misurare un rumore di accelerazione con una sensibilità migliore di
¹⁄D
¬­
≃ 30t ⁄ nella regione dei mHz, contro il limite imposto per LISA al di sotto di
¹ D
¬­
≃ 3t ⁄ ad 1 mHz. Inoltre, questa strumentazione ha permesso di caratterizzare
le sorgenti individuali di disturbo tramite misure di precisione delle forze, portando alla determinazione di un limite superiore ai rumori in forza esercitati dal GRS molto vicini ai requisiti del LTP
(23).
In questa sezione descriveremo in dettaglio il sensore capacitivo sviluppato a Trento, che ha sia
capacità di attuatore che di sensore. Introdurremo i principi dello schema di lavoro e il modello del
rumore che impone molte delle linee guida nel design dello strumento, stimando alcuni tra i possibili contributi delle sorgenti di rumore in lettura e in forza. Vedremo la geometria del sensore e la
sua implementazione e presenteremo la facility del pendolo di torsione a quattro masse usato per
caratterizzare il sensore.
⁄
4.1 Il sistema di controllo Drag-Free
Per raggiungere il livello di prestazione per la sensibilità di LISA PF richiesto in Figura 19, il
punto chiave è di riuscire a mantenere lo stato di caduta libera di ciascuna test-mass lungo la dire-
zione del fascio laser che la colpisce. Il satellite è usato come scudo contro i disturbi ambientali
esterni che possono produrre disturbi in forza, come per esempio quelli dovuti alla pressione di
radiazione solare. Tutto ciò è realizzato dal loop di controllo drag-free, nel quale un set di micro
propulsori FEEP, è guidato dal segnale generato dal sensore capacitivo di spostamento e produce
la forza da applicare allo spacecraft per seguire le masse.
Sia il satellite che il sensore di posizione possono produrre forze di disturbo sulle test-mass. Affinché le masse siano in caduta libera più vicino possibile all’orbita geodetica definita dal campo gravitazionale esterno, il GRS deve realizzare una misura di posizione con precisione sufficientemente
alta, ma minimizzando le forze di disturbo residue sulle masse.
Nel caso particolare di un loop di controllo per una singola massa e un singolo asse
dell’interferometro, si può calcolare come l’accelerazione residua sulla test-mass e lo spostamento
relativo dello spacecraft dipendano dalle seguenti forze di disturbo:
• Quelle applicate allo spacecraft, Fs c , che includono i rumori dei propulsori e la differenza
di accelerazione gravitazionale tra i centri di massa della test-mass e dello spacecraft.
• Quelle che intervengono tra test-mass e spacecraft, t"F , dovute al rumore termico e alla
fluttuazione della pressione di radiazione.
• Il contributo dovuto al rumore di spostamento del sensore - che guida i propulsori e
produce forze casuali.
In questa configurazione, le equazioni del moto per lo spacecraft e per una singola massa sono:
-» O+P + hL- O+P − ¸O+PQ = tO+P
m¸»O+P − hL-O+P − ¸O+PQ = −tO+P + 9L-O+P + - O+P − ¸O+PQ + O+P
dove x(t) e X(t) sono le posizioni relative al sistema di riferimento inerziale della massa di prova e
dello spacecraft; m e M sono le masse rispettivamente della test-mass e dello spacecraft; k è la
stiffness dell’accoppiamento tra i due; f(t) è il rumore in forza totale che agisce sulla massa, oltre
all’accoppiamento elastico con lo spacecraft; G è il guadagno in loop aperto del sistema di retroazione drag-free; F(t) è il rumore in forza che agisce sullo spacecraft; - O+P, come detto, è il rumore
del sensore inerziale.
Passando al dominio delle frequenze, lo spostamento dello spacecraft relativo alla test-mass è:
xs c =
Fs c
1
2
M ω 2fb + (1 + µ )ω int
2
ω fb
f
(1 + µ )
− int 2
+ xn 2
2
2
2
m ω fb + (1 + µ )ω int − ω
−ω
ω fb + (1 + µ )ω int2 − ω 2
dove } = ⁄m è la massa ridotta.
L’accoppiamento residuo della massa di prova e dello spacecraft è riassunto nel termine
N"F
= h⁄, che rappresenta la frequenza naturale di oscillazione della test-mass rispetto a
quest’ultimo.
Il guadagno del loop di controllo (cioè la forza applicata sullo spostamento) diviso la massa dello
spacecraft è invece incluso nel termine N
º
= 9/m (21).
Si può vedere che, nel limite di alto guadagno <N
º
< ≫ <N"F
<, N , l’accelerazione residua della
test-mass è:
55
"% ≃
%⁄C
t"F
+ N"F
^- OP +
`.
mN
º
Così, la richiesta che la massa sia in caduta libera entro la specifica dell’equazione (7.) è una condizione per la densità spettrale di rumore di t"F ⁄, - OP e %⁄C , ma anche per N"F e N
º .
Poiché siamo interessati all’analisi dei contributi al rumore in forze sulle test-mass, calcoliamo la
forza totale che agisce sulla massa, moltiplicando per m l’accelerazione:
%⁄C
f ≃ t"F + h ½- OP +
¾ = t"F + h∆-.
9
Questa equazione descrive due contributi diversi al rumore in forza che agisce sulla test-mass: le
forze parassite che sorgono sia nel sensore di posizione che nel satellite e che agiscono direttamente sulla test-mass, e un accoppiamento elastico k, che proviene dalle forze tra la massa e lo
spacecraft che dipendono dalla posizione, che collega il moto residuo relativo massa-spacecraft
nel rumore in forza. Il jitter residuo nel moto relativo del satellite ∆-, proviene in parte dal rumore
di posizione del sensore - OP, e in parte dalle forze che agiscono sul satellite, che non sono perfettamente compensate con un guadagno finito del loop di controllo drag-free.
L’obiettivo descritto in equazione (7.) per il rumore in accelerazione residuo, pone un serio vincolo
non solo alle forze residue, ma anche all’accoppiamento k, sulla densità di potenza spettrale del
rumore del sensore di posizione - OP, e sul guadagno G, che deve essere massimizzato per limitare i disturbi esterni sullo spacecraft.
In conformità con il bilancio di rumore prima riportato per LISA (1) (21), il requisito per la densità
di potenza spettrale del rumore del sensore di posizione per il GRS è
¹
D
≤ 1.8 ⁄ .
¬­°
¿
Questa sensibilità nello spostamento deve essere raggiunta senza esercitare alcuna forza parassi-
ta, quindi, il rumore in accelerazione deve restare al di sotto di ¬­
≃ 3 t⁄ √ ad 1 mHz.
Si deve notare che l’accoppiamento tra test-mass e spacecraft sorge principalmente
dall’interazione gravitazionale dei due e dalle forze elettriche tra massa e GRS.
Al di là di questo modello semplificato, in ogni satellite di LISA ci sono due masse di prova ed è impossibile per lo spacecraft seguirle entrambe. E’ necessario che il GRS fornisca un sistema di attuazione tale che lo spacecraft segua le masse lungo l’asse interferometrico, che è l’unico sensibile alle onde gravitazionali. Contemporaneamente ciascuna massa va ricentrata lungo gli assi ortogonali
agendo con forze elettrostatiche.
⁄
4.2 Il sensore capacitivo
L’attuale design del sensore di posizione capacitivo è frutto di un accurato studio del gruppo
dell’Università di Trento (24). Esso è costituito da una massa di prova cubica racchiusa in una shell
56
della stessa forma, l’electrode housing (EH), con una gap di pochi millimetri tra le due, lungo tutte
le direzioni. L’EH ospita gli elettrodi di sensing e di injection necessari al sensore capacitivo, ed alcuni altri elementi, come i fori necessari alla lettura laser e i meccanismi di bloccaggio della testmass.
Il sensore è essenzialmente un ponte capacitivo dove le due facce sono costituite dalla test-mass e
dall’EH, solidale con lo spacecraft.
Figura 20: Struttura dell’electrode housing. Sulle varie facce smontate si notano gli elettrodi del sensore
capacitivo.
La maggior parte delle forze parassite che disturbano il moto geodetico delle test-mass sorge nel
GRS stesso. Ciò ha importanti conseguenze nel design:
• Le gap tra le masse e l’EH devono essere mantenute più larghe possibile, compatibilmente al raggiungimento di una sufficiente sensibilità nella posizione. Il GRS lavora con gap di
4 mm per l’asse interferometrico x, sensibile al segnale gravitazionale, e 3.5 mm e 2.9 mm
rispettivamente per gli assi x e z.
• Il voltaggio ÀFR usato per percepire il moto della test-mass è mantenuto più basso possibile. I voltaggi possono creare una stiffness molto più rapidamente di quanto cresca la
⟩,
sensibilità: la stiffness è proporzionale a ⟨ÀFR
mentre la densità spettrale del rumore di
posizione è inversamente proporzionale a ⟨|ÀFR |⟩.
• Nessun voltaggio dc è permesso sulla test-mass e sulla superficie dell’elettrodo, perché
questo si accoppia alle altre sorgenti di rumore in tensione o di dispersione della carica,
producendo rumore in forza.
• Il valore della massa della test-mass è scelto più grande possibile, perché tutte le forze,
eccetto quelle gravitazionali, producono accelerazioni inversamente proporzionali alla
57
massa. Molte delle forze di disturbo sono proporzionali alla superficie della massa. Per
una massa cubica di lunghezza L e densità uniforme, la superficie scala come , mentre la
massa scala con il volume e quindi con .
• Raggiungere un alto valore per la massa in una dimensione geometrica limitata vuol dire
richiedere un’alta densità per il materiale. Il nucleo del GRS, come già descritto, è una
massa cubica di dimensioni 46 mm e peso 2 kg fatta di una lega di oro e platino monofasico ottenuta da una tecnica rapida di tempra del materiale.
La configurazione geometrica del sensore di posizione è mostrata in Figura 21. La test-mass è circondata da un array di sei coppie di elettrodi montati sull’electrode housing.
Figura 21: Schema del sensore capacitivo. La test-mass è circondata dagli elettrodi. A destra è rappresentata la configurazione degli elettrodi, rispettivamente, lungo gli assi x, y, z. L’asse x, in questo schema, è
quello sensibile alle onde gravitazionali. I fori mostrati nello schema sono per il fascio laser
dell’interferometro (asse x), e per il pistone del meccanismo di bloccaggio (asse z), necessario a mantenere ferma la test-mass durante la fase di lancio. Le dimensioni della test mass sono di 46 mm mentre la
gap tra elettrodi e test-mass è di 4 mm.
Ognuno di questi elettrodi entra in un circuito di lettura capacitivo-induttivo risonante. I sei canali
di readout possono essere combinati linearmente per ricostruire gli spostamenti della test-mass in
tutti e sei i gradi di libertà. Analogamente, gli stessi vengono combinati per permettere
l’attuazione elettrostatica sui medesimi gradi di libertà. La test-mass è polarizzata a N"F iniettando una corrente attraverso un set di sei elettrodi di iniezione. Questi sono 2+2 sulla faccia z e 1+1
su quella y, su cui è applicato un bias in tensione ÀC al massimo di 8.5 V.
La misura di posizione della test-mass è basata sul confronto delle capacità. Il moto della test-mass
cambia la gap tra questa e gli elettrodi opposti, modulando la differenza delle due capacità C1 e C2
formate dalla massa e dalla coppia di elettrodi di fronte a questa dal lato opposto. Gli elettrodi
fanno parte dello stesso ponte risonante. La variazione nelle capacità induce una differenza nella
corrente che fluisce attraverso le due induttanze L1 e L2 del ponte. Questa differenza è poi letta da
un amplificatore, come un flusso di corrente attraverso il trasformatore finale ed è estratta da un
rivelatore sensibile alla fase, allacciato al segnale di iniezione. Il segnale finale, che è proporzionale
alla differenza di capacità, è proporzionale anche allo spostamento della test-mass. L’impiego del
rivelatore di fase, infine, garantisce la reiezione del rumore elettronico a frequenze diverse da
58
quelle di iniezione e l’effettiva misura del segnale, malgrado la piccola variazione nella tensione attraverso la spira secondaria del trasformatore.
Il dislivello di tensione ∆À tra le test-mass e ogni superficie circostante, indotta dal bias di iniezione, dà luogo ad una forza attrattiva proporzionale al suo valore rms ∆À . Se il dislivello in tensione
non è simmetrico, questa forza attrattiva può essere sfruttata per ottenere una capacità di attuazione: cambiando la tensione di uno degli elettrodi, si accresce il suo dislivello di tensione rms verso la massa e risulta la creazione di una forza netta.
La test-mass e la coppia di elettrodi di fronte a essa sono connessi per formare due ponti capacitivi-induttivi letti da due canali di lettura indipendenti per ogni asse coordinato. La somma delle correnti prodotte dai due canali produce uno spostamento traslazionale delle test-mass rispetto al
centro dell’electrode housing. La differenza produce la rotazione della test-mass.
Figura 22: Esempio dello schema di arrangiamento dei ponti capacitivi di lettura su una coppia di facce,
per discriminare sia il grado di libertà traslazionale che rotazionale. Gli elettrodi che appartengono allo
stesso ponte capacitivo sono colorati allo stesso modo, mentre il simbolo accanto ad essi indica la loro
variazione di capacità sul moto della test-mass considerata. Si può vedere che se la test-mass trasla, lo
squilibrio capacitivo ha lo stesso segno su due ponti, mentre se la test-mass ruota, lo squilibrio è opposto
su due ponti. Ciò permette la discriminazione dei due gradi di libertà.
Combinando tutti i sei ponti posti su tre lati della test-mass, che si notano in Figura 21, si ottiene la
completa discriminazione di tutti i sei gradi di libertà di una massa libera.
Molte delle forze di disturbo che agiscono sulle test-mass si originano dai gradienti di temperatura
attraverso l’alloggiamento del sensore. E’ richiesta quindi un’alta conducibilità termica del GRS per
limitare questi gradienti. I materiali usati per la realizzazione del GRS devono soddisfare queste richieste: alta conducibilità termica, affidabilità meccanica agli stress sofferti durante le fasi di lancio
e richiesta di semplici e comuni lavorazioni a macchina.
I primi prototipi del sensore sono stati realizzati da strutture ad alta conduttanza termica composte di molibdeno, per le parti elettriche conduttive, e lo zaffiro o le ceramiche ad alta conducibilità
termica per gli isolanti elettrici.
59
4.3 Il pendolo di torsione a quattro masse
Il banco di prova, al suolo, per testare il moto di caduta libera delle test-mass di LISA, consiste
in un pendolo di torsione. La realizzazione di questa campagna sperimentale ha lo scopo di caratterizzare i disturbi esercitati sulle masse di prova dal sensore di riferimento gravitazionale in progetto, nella regione dei mHz e al di sotto di questa.
In una prima fase (25) è stato utilizzato un pendolo di torsione a singola massa che permetteva di
misurare solo le forze differenziali sulla test-mass. Successivamente è stato sviluppato un pendolo
di torsione a quattro masse, ed è su quello che si è svolta la sperimentazione di questa tesi.
Lo schema del pendolo è mostrato in Figura 23. Il membro inerziale del pendolo è costituito da
quattro masse di prova simili a quelle di LISA (con superfici riflettenti placcate in oro con uno strato di 1 µm e di 46 mm di lato), ma cave al loro interno, che sono montate su un supporto a forma
di croce (shaft), con un braccio di lunghezza b = 10.7 cm (distanza del centro della massa dal centro del pendolo) (26).
Figura 23: Schema del pendolo a 4 masse. (a) si vede lo shaft con le 4 masse montate alle estremità dei
bracci; (b) lo shaft visto dall’alto, si notano il prototipo del GRS e lo stiffness compensator che circondano
due masse opposte; (c) schema di una singola test-mass circondata dal sensore capacitivo; (d) singola
test-mass con il braccetto corrispondente; (e) electrode housing.
Il pendolo viene sospeso attraverso una fibra in tungsteno, di lunghezza ≈ 105* e spessore
50}, alla sommità di una camera da vuoto. Al suo interno, si lavora con pressioni dell’ordine di
1 ∙ 10) ´ per ridurre sufficientemente gli effetti radiometrici ed il rumore browniano. Il setup sperimentale deve essere per lungo tempo tenuto stabile sia termicamente che meccanicamente, oltre che privo di campi magnetici. Per fare ciò, la camera da vuoto, a sua volta, viene racchiusa in una camera con pareti isolanti, all’interno della quale la temperatura è controllata tramite un bagno termalizzato e un sistema a circolazione d’aria. La camera da vuoto cilindrica ha una
capacità di circa 300 litri ed ha un raggio di 80 cm. Sul recipiente è montato un tubo lungo 90 cm e
largo 20 cm che racchiude la fibra del pendolo e chiude la camera. La stiffness torsionale della fi60
bra è stimata Γ ≈ 8.7 ∙ 10 !⁄ (27). Il recipiente ha delle flange laterali che permettono
una facile installazione delle periferiche e dell’hardware interno. Tutta la camera poggia su tre
piedi la cui altezza può essere aggiustata con movimenti micrometrici, per allineare lo strumento
sul piano orizzontale e per compensare il tilt con accuratezza del µrad.
Figura 24: La camera da vuoto in cui viene racchiuso il pendolo.
L’intero apparato è posto su una lastra di pavimento non connessa rigidamente al resto
dell’impiantito del laboratorio. Ciò permette di avere un certo grado di isolamento dal rumore sismico prodotto dall’attività umana nel laboratorio che circonda l’esperimento.
61
Questa configurazione è scelta perché il pendolo risulta essere sensibile alle forze nette lungo
l’asse traslazionale z. In riferimento alla Figura 25, per piccole rotazioni φ, la massa subisce una
traslazione ≈ ´ ∙ . La coordinata z è chiamata grado di libertà soffice, in quanto, lungo questa
direzione la massa può considerarsi approssimativamente in caduta libera. In questo modo lo
strumento è quindi sensibile alle forze sulla test-mass lungo il grado di libertà z e le torsioni sul
grado di liberà ϕ, con una risoluzione dell’ordine di 5 fN e 0.5 fN m, rispettivamente, in un tempo
di integrazione di un’ora.
Figura 25: Schema del pendolo di torsione a 4 masse che mostra il membro inerziale, e i due sensori capacitivi chiamati FM-r (Flight Model replica) e STC (STiffness Compensator). Sono indicati i sistemi di riferimento e lo schema degli elettrodi.
La semplice geometria tipo Cavendish del pendolo di torsione a quattro masse è la migliore soluzione per poter disaccoppiare il processo di misura dal campo gravitazionale locale. La fibra che
sostiene il peso del membro inerziale, lo tiene bloccato parallelamente al campo gravitazionale locale, riducendo l’accoppiamento tra il grado di libertà rotazionale con il potenziale gravitazionale
terrestre. Con una scelta corretta per le dimensioni della fibra e i materiali, si può raggiungere una
costante elastica di torsione molto bassa e un alto fattore di qualità, e ciò ha come risultato di avere un basso rumore termico torsionale e quindi una maggiore sensibilità.
Tutti i dati acquisiti durante le operazioni sperimentali sul pendolo, sono raccolti da un sistema di
acquisizione informatico, tramite routines Matlab. Diversi data-stream sono letti direttamente da
un circuito ADC cha campiona a 10 Hz (come il sistema di lettura elettronico). Lo stesso sistema
provvede all’attuazione del pendolo e al controllo dei parametri degli strumenti tramite un circuito
DAC.
62
4.3.1
Le equazioni del pendolo
L’equazione del moto del pendolo lungo il grado di libertà sensibile, quello rotazionale φ, può
essere scritta come
_ÃÃ O+P + ÄÃ O+P + ΓO+P = !O+P
dove I è il momento di inerzia del membro inerziale sospeso, Γ è la costante elastica torsionale della fibra, N la coppia applicata (o torque) e β un termine dissipativo. Passando al dominio delle frequenze, si può definire f = 1⁄Å l’angolo di dispersione e scrivere la relazione tra il torque applicato e la trasformata di Fourier dell’angolo di spostamento come:
!ONP
_N ONP + ΓO1 + Mf PONP = ! ONP ⇒ ONP =
.
ΓO1 + Mf P + _N
Esplicitando la relazione _ = Γ⁄N' , dove N' è la frequenza angolare di risonanza naturale
nell’approssimazione di piccoli δ (alto fattore di qualità), e introducendo la funzione di trasferimento del pendolo ONP, si può riscrivere l’equazione del moto nella forma più comunemente
usata:
1
ONP = ONP!ONP; ONP =
.
Γ e1 − pÇÇÈ r + É" g
Ciò significa che ogni forza esterna che agisce ad una frequenza angolare ω potrebbe essere convertita in un moto angolare del pendolo alla stessa frequenza con un fattore di scala dato dalla
precedente funzione di trasferimento. Misurando questo moto, è possibile stimare, attraverso la
conoscenza dei parametri del pendolo, la coppia esterna che eccita il pendolo.
Comunque, il segnale di spostamento angolare misurato R ONP sarà interessato da un rumore
ONP, cosicché
R ONP = ONP + ONP = ONP!ONP + ONP
e così il torque misurato avrà una densità di potenza spettrale data da
¬Ë ONP
¬Ê ONP = ¬ ONP + ¿ .
|ONP|
¬ ONP è costituito dalle sorgenti esterne al GRS e dal rumore termico del torque indotto dalla dissipazione nella fibra, che ha una densità spettrale data da:
Ï
9.
¬ ONP = 4Î ~
ÌÍ
ÇÉ
dove Î è la costante di Boltzmann e T la temperatura operativa.
Il rumore strumentale di fondo è quindi
¬Ë ONP
¬Ê ONP = ¬ÌÍ ONP + ¿ |ONP|
che può essere migliorato riducendo il rumore di lettura angolare, e procurando una fibra con un
alto Q e una bassa stiffness torsionale Γ. La stiffness dipende dal raggio della fibra r tramite la relazione
8 2
Γ=
p + r,
2
8
63
in cui L è la lunghezza della fibra, F il coefficiente elastico del materiale impiegato, m la massa del
pendolo e g il campo gravitazionale locale.
Le test-mass sono sospese in maniera decentrata rispetto alla fibra del pendolo di torsione, in
quanto poste all’estremità dello shaft a forma di croce. In questa configurazione come si vede in
Figura 26, ogni forza che agisce su una test-mass e lungo la direzione ortogonale alla fibra di sospensione e alla linea che le collega, produrrà un momento torcente con un braccio uguale alla distanza tra massa e asse della fibra. Montare il sensore GRS con il suo asse x lungo questa direzione, permetterebbe di essere sensibili ad ogni sorgente di rumore esercitata da una forza sulla
massa lungo l’asse x, che è il più critico per gli esperimenti nello spazio.
Figura 26: Schema che illustra l’idea di un pendolo di torsione sensibile alle forze: sospendere le masse
decentrate rispetto alla fibra, tramite una connessione rigida, permette alle forze di agire lungo l’asse x
per produrre un torque rispetto alla fibra di torsione.
In questa situazione, la componente Z (l’unica che produce una rotazione intorno alla fibra) del
torque totale N esercitato sul pendolo dalle forze tÐ" che agiscono sulla test-mass, può essere scritta come
!Ñ = jÒ́Ð × tÐ" ⋅ ̂ + jÐ" × tÐ" ⋅ ̂
"
"
dove ̂ è il vettore concorde alla direzione Z, Ò́Ð è braccio del pendolo cioè il vettore che unisce la
fibra al centro della massa, mentre Ð" è la distanza dal centro della massa al punto di applicazione
della forza tÐ" .
Esplicitando i prodotti nell’ultima relazione, si ottiene:
!Ñ = ´ j tÐ" ⋅ -Õ + jÐ" × tÐ" ⋅ ̂ = ´Ö + !Ñ,V@ .
"
"
Qui, Ö è la forza netta che agisce sulla test-mass lungo l’asse x e !Ñ,V@ è la componente Z del torque calcolata rispetto al centro della test-mass.
L’ultima relazione mostra che la configurazione proposta del pendolo, oltre ad essere sensibile alle
forze agenti sulla test-mass lungo la direzione x, permette di rilevare anche il torque che agisce
sulla test-mass, dovuto sia alle componenti x che z, delle forze che agiscono sulla test-mass.
64
4.3.2
Il Flight Model replica
Il sensore capacitivo montato sul pendolo di torsione viene denominato Flight Model replica
(FMR) ed è un prototipo in scala reale di quello che volerà sul LISA Pathfinder. Questo è composto
da sei paia di elettrodi, come già visto in Figura 21, montati sull’electrode housing, che permettono di misurare spostamenti in tutti e sei i gradi di libertà. L’electrode housing del FMR contiene
anche gli elettrodi per l’attuazione e le fibre del sistema di scarica UV. In Figura 21 si può vedere la
disposizione degli elettrodi sulle varie facce della test-mass. Sulle facce x si hanno solo due elettrodi di sensing di dimensione 14.5x36 mm, per una capacità stimata verso il centro della massa di
circa 1.15 pF. Tra i due elettrodi c’è un foro di diametro 6 mm per il passaggio della luce che raggiunge la massa per la lettura interferometrica. Su ogni faccia y ci sono due elettrodi di sensing più
piccoli 7.1x39.2 mm di capacità 0.83 pF, ed uno centrale di injection di 1.24 pF. Sulle facce z ci sono
due elettrodi di sensing e due di injection. I primi hanno una capacità stimata di 0.6 pF mentre i
secondi di 0.42 pF. Eccetto che per una scanalatura di 1 mm attorno ad ogni elettrodo, la restante
superficie interna dell’electrode housing è costituita da anelli di guardia collegati a massa che puntano a ridurre il cross-talk diretto tra gli elettrodi, sia di sensing che di injection (27).
Il FMR è montato su un motore a slitta che permette di controllare con precisione la sua posizione
sull’asse x. Inoltre, vi è connesso un sistema di radiatori che permettono il riscaldamento delle facce x, mentre alcuni termometri monitorano la temperatura in diversi punti del sensore capacitivo
e della camera da vuoto. Un sensore da vuoto fornisce una misura della pressione nell’apparato
sperimentale, mantenuto termalizzato nella camera da vuoto.
4.3.3
Lo Stiffness Compensator
Intorno alla massa opposta al FMR, sul membro inerziale, come si vede in Figura 25, è posto
un altro sensore capacitivo denominato Stiffness Compensator (STC). Il suo principio di funzionamento è identico a quello del Flight Model, ed è progettato per avere un rumore di lettura di spostamento confrontabile con quello del FMR. Esso è utilizzato per compensare l’accoppiamento in
torsione indotto sul pendolo dalla stiffness elettrostatica del FMR. Cioè, lo STC viene usato per bilanciare il gradiente di forza elettrostatico introdotto dal FMR producendo lo stesso gradiente sulla
test-mass opposta (28). Il ruolo di questo sensore è determinante nelle misure su pendolo di torsione. Nelle misure viene effettuata la differenza tra la sua lettura e quella del sensore FMR, ricavando così, una misura della variazione dell’angolo di torsione del pendolo venti volte più sensibile
della lettura angolare che fornirebbe il solo FMR.
Questo sensore è composto da tre paia di elettrodi, separati dalla test-mass da una gap di 8 mm,
più larga rispetto al caso del FMR, ed uguale su ogni asse coordinato. Ciò fa si che le forze di disturbo non volute che agiscono sulla superficie della seconda test-mass siano significativamente
65
più piccole di quelle prodotte dal FMR. Il sensore ha tre elettrodi per faccia ed è sensibile solo alle
traslazioni della test-mass. La misura di posizione può avvenire solo in x e z, mentre l’elettrodo in y
si usa solo per applicare un bias in tensione.
La capacità degli elettrodi di injection verso la test-mass del STC è ∼ 4.3K, mentre la capacità totale della test-mass verso le superfici che la circondano è di 20.9 pF. Infine, le sensibilità in spostamento e in tensione sono, rispettivamente, ¬°
4.3.4
⁄
= 2.5 ⁄√ e ¬×
⁄
∼ 2.5 À ⁄√.
L’allineamento dei sensori
Ogni sensore è stato allineato manualmente e fissato ad una base costituita da un piatto di
alluminio, montato su colonnine in PEEK, un materiale che permette sia un isolamento elettrico
che termico. Il piatto viene poi inserito nella camera da vuoto (Figura 27) e fissato a questa con viti
di alluminio.
Figura 27: Immagine del membro inerziale e dell’allineamento su banco dei sensori capacitivi. Questo
mostra la disposizione dei sensori capacitivi nella facility di test del GRS. Sulla sinistra si vede il Flight
Model replica (FMR). Sulla test-mass opposta è posizionato lo Stiffness Compensator (STC).
La procedura manuale di allineamento per i due sensori capacitivi è pressoché la stessa e viene effettuata prima di mettere il membro inerziale in sospensione. La procedura si svolge su un banco
di lavoro su cui è posta la base di alluminio a cui è agganciato il membro inerziale e i sensori. Il
membro viene montato e fissato, e non va spostato durante le fasi di allineamento. In tempo reale, si vedono, sul monitor di acquisizione dati, i segnali in tensione degli elettrodi sui diversi gradi
di libertà dei due sensori capacitivi. L’allineamento si ottiene spostando gli electrode housing con
delle viti e con un motorino elettrico controllato in remoto, presente solo per il FMR, sul grado di
libertà x. Gli spostamenti comprendono sia traslazioni che rotazioni, per rendere le facce del EH
66
ortogonali a quelle della test-mass. Il target minimo di accuratezza per l’allineamento su banco richiede che i segnali siano tutti posizionati intorno allo zero entro 50 µm in traslazione e 100 µrad
in rotazione, per entrambe i sensori. Raggiunta la precisione voluta si procede al bloccaggio dei
sensori e all’inserimento del piatto di alluminio nella camera da vuoto Figura 24.
4.3.5
L’autocollimatore
La misura differenziale dei due sensori capacitivi è calibrata con un autocollimatore ottico,
che misura due gradi di libertà angolari. Esso è rigidamente installato all’esterno della camera da
vuoto e produce un fascio che attraverso una finestra nel tubo della camera da vuoto, incide su
uno specchio fissato sul membro torsionale del pendolo. Questo fornisce misure indipendenti dei
modi del pendolo torsionale φ ed oscillante η, di precisione comparabile a quella dei sensori capacitivi. La sua risoluzione è di 50 nrad su entrambi gli assi, mentre lo spettro del rumore è
dell’ordine di 20 ⁄√ (27).
4.4 Rumori in forza
L’analisi dei dati dei sensori capacitivi riguarda angoli e torque, che sono le quantità rilevanti
per il pendolo di torsione. In generale si usa la facility per analizzare i disturbi relativi al FMR e il
modo in cui questi diventino rumori in forza, ovvero accelerazioni sulla test-mass.
Le ultime campagne di test hanno ottenuto una sensibilità per la forza differenziale nel range dei
mHz migliore di ~60 t!⁄√ (28) (27). Ciò meno di due ordini di grandezza dai requisiti di LISA
per l’isolamento delle forze (6 ∙ 10 !⁄√) e meno di un fattore 10 dall’obiettivo del LTP di
6 ∙ 10 ! ⁄√. Alla frequenza di 100 mHz il limite è circa 4 ∙ 10 !⁄√, quindi un fattore
cento dal limite previsto per LISA e un fattore dieci da quello di LISA PF. Questo è il primo passo
verso la dimostrazione della fattibilità della missione LISA.
4.4.1
Rumore relativo al circuito di lettura
Lo schema di lettura capacitivo è responsabile delle prime ed inevitabili sorgenti di rumore
sulle test-mass di LISA (24). Esso contribuisce dal punto di vista degli accoppiamenti elastici tra
test-mass e sensore: il potenziale elettrico ÀC usato per polarizzare le test-mass induce un gra67
diente di forza traslazionale. L’accoppiamento elettrostatico h lungo l’asse x può essere calcolato
come:
⟨OÀR P ⟩
A Ø"
h = −
j 4
A"
dove ÀR ≃ 0.6À è il voltaggio potenziale rms della test-mass dovuto al bias di sensing di 100 kHz
previsto per le operazioni del GRS. La somma si estende su tutte le superfici conduttive i che si affacciano sulla test-mass, formando una capacità Ø" con essa. Questo accoppiamento può essere
rozzamente stimato con un semplice modello dove la test-mass e gli elettrodi che la circondano
sono considerati una barriera di condensatori piani. Trascurando la geometria degli elettrodi nel
dettaglio e gli effetti di bordo, la capacità per ogni lato i della test-mass è:
Ù' Ø" =
"
dove L = 46mm è la lunghezza del lato della massa, " è la dimensione della gap tra massa ed elettrodo, ed Ù' è la permittività dello spazio vuoto.
Il valore dell’accoppiamento elastico è stimato h ≃ 10) ! ed è un contributo che va verificato per dimostrare l’attendibilità del modello elettrostatico del sensore (29).
4.4.2
Le interazioni elettrostatiche
Le forze elettrostatiche parassite rappresentano le sorgenti di rumore in forza più minacciose
per il sensore capacitivo. Considerando le formule ben conosciute della forza attrattiva tra i piatti
di un condensatore e tenendo presente che ogni superficie che circonda la test-mass ha una capacità Ø" verso di essa, si può fare una stima del rumore in forza indotto dai disturbi elettrostatici,
che possono essere ottenuti con un semplice modello (27), in cui i piatti sono piani e paralleli e gli
effetti di bordo sono trascurabili. La forza elettrostatica che agisce sulla test-mass lungo l’asse x, in
questo caso, si può scrivere:
1
AØ"
OÀ − À" P
° = j
2
A- V@
"
dove À" è la tensione sull’i-sima superficie e ÀV@ il potenziale della test-mass. La somma su i è
estesa a tutte le superfici che circondano la test-mass.
Il potenziale della massa dipende sia dalla tensione sulla superficie À" , che dalla carica libera sulla
superficie q, per cui
Ú
1
ÀV@ =
+ j Ø" À" + Û"# À"# sinN"# +.
ØV ØV
"
Il primo termine indica la carica sulla test-mass dovuta all’impatto di raggi cosmici. Il secondo termine è dovuto alla polarizzazione indotta da ogni superficie sulla test-mass. Il termine finale è il
68
bias di sensing AC indotto dalla capacità usando un voltaggio sinusoidale con ampiezza À"# sugli
elettrodi di injection, come spiegato nella sezione 4.2.
Senza entrare nei dettagli di ogni singolo contributo, si può notare che ogni termine nella precedente equazione produce due effetti distinti: gradienti delle forze che contribuiscono alla stiffness
totale del sensore sulla test mass, in modo simile al caso del bias degli elettrodi di sensing; la dipendenza delle forze dal tempo, che dà luogo al rumore di accelerazione con densità spettrale relazionata a quella originata dal campo elettrico. Il contributo più importante alla stiffness è dato
dalla carica accumulata sulla test-mass:
1 Ú A Ø"
hß = − e g j .
2 ØV
A"
Questi contributi pongono un requisito molto stringente sulla massima carica che può essere accumulata sulle test-mass. Il livello massimo che può essere raggiunto è di ≃ 10o cariche elementari. Per questo motivo è stato sviluppato un sistema di scarica UV (17) per rimuovere le cariche in
eccesso sulle masse.
4.4.3
Disturbi dovuti ai gradienti termici
I fattori dominanti nel bilancio del rumore in forza sono le forze generate dalle fluttuazioni dei
gradienti termici attraverso il sensore. E’ possibile identificare tre sorgenti di rumore principali, di
cui non parleremo nello specifico, ma rimandiamo alla referenza (23) per ulteriori approfondimenti: l’effetto radiometrico, la pressione di radiazione termica e il degassamento asimmetrico.
Il gradiente termico ∆~° , impone una pressione differenziale nel gas residuo nel sensore ad una
pressione media ¢' , dando luogo ad una forza netta
I¢'
° = Ûà
∆~ ,
4~' °
dove A è l’area di una faccia della test-mass, ~' è la temperatura media del sensore e Ûà è un fattore che tiene conto delle molecole di gas incidenti sulle facce y e z della massa e che contribuiscono alla forza lungo x. Il lato più caldo del sensore emetterà fotoni più energetici creando una
forza netta dovuta alla pressione di radiazione
8â
° = Ûàá I ~'
∆~° ,
3*
dove σ è la costante di Stefan-Boltzmann, c è la velocità della luce e Ûàá è un fattore che tiene
conto della riflettività della massa e della radiazione con una componente del momento lungo x
che si ripercuote sulle facce y e z (28).
69
Il sensore ottico MRORO
5 IL SENSORE OTTICO MRORO
Dal 2004, il gruppo di ricerca di LISA di Napoli si occupa dello sviluppo e del testing di un sistema di lettura ottico per il sensore inerziale di LISA. La prima versione del sensore è denominata
ORO (Optical Read-Out) ed il suo principio di funzionamento si basa su una leva ottica. Come si vede in Figura 28, un fascio laser viene inviato attraverso una fibra ottica single mode su una delle
facce della test-mass. Il fascio riflesso viene raccolto da un dispositivo sensibile alla posizione del
beam: un fotodiodo a quadrante (QPD). I segnali generati dal fotodiodo sono letti da un amplificatore, che li trasforma da segnali in corrente a segnali amplificati in Volt. All’estremità della fibra è
posto un collimatore per rendere minima la divergenza del fascio laser. Una rotazione o una traslazione della massa corrispondono ad uno spostamento del fascio sul QPD. Una traslazione della
test mass ∆-V@ causa uno spostamento del fascio ∆-áµ sul fotodiodo che dipende dall’angolo di
incidenza θ secondo la relazione (4):
∆-áµ = ∆-V@ ∙ sin ã.
Una rotazione della massa di prova Ƌ attorno ad un asse ortogonale alla normale alla superficie,
corrisponde, invece, ad uno spostamento ∆-áµ dello spot sul fotodiodo, che dipende dalla leva l,
cioè la distanza tra sensore e superficie riflettente:
∆-áµ = 2ä ∙ sin ã.
Una opportuna combinazione di tre sensori ottici permette di ricostruire gli spostamenti della
massa in tutti e sei gradi di libertà.
Figura 28: Schema di funzionamento dell’ORO. Il fascio laser viene focalizzato da un collimatore posto
all’estremità della fibra ottica. Il fascio riflesso viene letto dal fotodiodo a quadrante.
Il principale scopo di questo sviluppo non è quello di rimpiazzare con un sensore ottico quello capacitivo, che sarà testato in volo sul LISA Pathfinder, ma l’integrazione dei due in un singolo sistema GRS in modo da avere un sistema di back-up in caso di malfunzionamenti dopo il lancio di LISA,
con conseguente riduzione dei rischi di missione. Il sistema ORO può essere più sensibile del sistema di lettura capacitivo, per cui potrebbe essere usato per il controllo del satellite sugli assi y e
z e per le rotazioni θ della test-mass attorno all’asse x, dove non si ha lettura interferometrica
(coordinate di riferimento in Figura 29).
Questo scopo può essere raggiunto adottando l’ORO come sensore principale o usandolo per sottrarre ulteriori rumori dal sistema di lettura capacitivo (30). In ogni caso, l’attuazione elettrostatica
resterà l’unica soluzione per agire sulle masse con delle forze.
Dopo alcuni test su banco, un primo prototipo del sensore ORO è stato installato con successo sul
pendolo di torsione a quattro masse nei laboratori presso l’Università di Trento. Ciò ha permesso
di confrontare le misure di rumore, in contemporanea per l’ORO e per il sistema capacitivo, permettendo di verificare il miglioramento in sensibilità prodotto dall’ORO. Il pendolo di torsione ha
permesso di misurare e porre dei limiti superiori ad ogni tipo di rumore in forza in eccesso provocato dall’ORO stesso.
L’ORO è stato montato sullo STC in una configurazione con due fasci e due fotodiodi Figura 29, che
consente la misura indipendente di due angoli e di uno spostamento (ϕ, η e x). In particolare, ogni
fotodiodo produce due segnali (proporzionali agli spostamenti verticali e orizzontali degli spot luminosi sull’area del rivelatore). I due segnali verticali sono usati per misurare spostamenti sui gradi
di libertà del pendolo η e x, mentre gli orizzontali producono misure indipendenti di ϕ (che vengono mediati per ridurre il rumore).
Figura 29: Schema dei sensori sul pendolo a quattro masse. Intorno alla massa 2, si vedono lo STC (che
misura due spostamenti x e z) e l’ORO (che misura ϕ, η e x).
71
I risultati della campagna di misure in cui l’ORO e il readout capacitivo hanno lavorato insieme,
hanno permesso di confrontare le misure di posizione (in spostamento ed in angolo) della testmass di entrambi i sensori. In Figura 30 sono mostrate le misure di sensibilità lungo il grado di libertà rotazionale, attorno all’asse verticale ϕ (30). Come si vede, la misura del sistema ORO (la linea blu) è più sensibile di quella del capacitivo FMR (linea rossa). Ciò conferma che la sensibilità
dell’ORO risulta di circa 2 ∙ 10 ⁄√ a frequenza di 10 mHz. Questa corrisponde ad uno spostamento del fascio attraverso l’area del fotodiodo di circa 8 ∙ 10' ⁄√. Sullo stesso plot sono mostrate le stime del rumore termico del pendolo e del rumore dell’ORO.
Figura 30: Sensibilità del sistema ORO misurata sul grado di libertà ϕ (in blu) confrontata con quella del
sensore capacitivo FMR (rosso). La sensibilità del FMR è limitata a ~å ∙ æYç èéê⁄√ëì, mentre l’ORO
raggiunge ~å ∙ æYí èéê⁄√ëì a 10 mHz. In azzurro si ha il rumore aspettato per l’ORO, in nero si ha il
rumore del pendolo.
Gli studi sul sensore ottico ORO (30) hanno concluso che le performance di un sistema ottico per il
GRS di LISA sul pendolo di torsione raggiungono una migliore sensibilità rispetto al singolo sensore
capacitivo, in una banda di frequenze di interesse per LISA (ciò è stato misurato direttamente per
gli angoli mentre si è posto solo un limite superiore per lo spostamento). Nella facility del pendolo
di torsione questo sistema ha ottenuto la stessa sensibilità del capacitivo nella misura dei rumori
in forze.
Attualmente è in fase di test una versione modificata del sensore ottico denominata Multiple Reflection Optical ReadOut (MRORO). Presentiamo gli sviluppi di questo sensore ed i risultati ottenuti
finora.
72
5.1 Il set-up del sensore MRORO
Il sistema MRORO è un dispositivo basato sulla stessa tecnologia del sensore ORO, ma permette di migliorarne la sensibilità angolare. Questo consentirebbe di migliorare, in termini di performance della facility del pendolo di torsione, la misura delle forze spurie e, quindi, di porre un
limite superiore più stringente al rumore in forze.
Il set-up del sensore presuppone, a differenza dell’ORO, l’utilizzo di cinque riflessioni multiple sulla
test-mass, come si vede in Figura 31.
Figura 31: Rappresentazione schematica del sensore MRORO come risulta vista lateralmente. In giallo è
visibile la test-mass sulla quale avvengono cinque riflessioni del fascio in verde. Di fronte la test-mass, in
blu, è rappresentato l’alloggiamento in alluminio dello specchio. Il fascio arriva infine sul fotodiodo posto
all’estrema destra del disegno, anch’esso in blu.
La sorgente luminosa usata per il MRORO è un LED (Light Emitting Diodes) super luminescente con
lunghezza d’onda nell’infrarosso = 830. Questo è accoppiato ad una fibra ottica single mode
con, in uscita, un collimatore a micro lente che permette la produzione di un fascio di dimensione
0.4 mm.
La fibra e il collimatore sono incernierati nella parte più bassa di un supporto di alluminio, su cui è
fissato anche uno specchio, placcato in oro. Il supporto è posto di fronte alla test-mass. La luce subisce un numero di riflessioni n = 5 tra test-mass e specchio, per poi raggiungere il fotodiodo a
quadrante attraverso un foro posto nel supporto, al di sopra dello specchio. Tale numero di riflessioni rappresenta un compromesso tra guadagno ottenuto, in termini di sensibilità, e cammino ottico, dal quale dipende la divergenza del fascio. Infatti con l’utilizzo di un fotodiodo a quadrante, si
perde sensibilità all’aumentare delle dimensioni dello spot del fascio. Con le riflessioni multiple, la
73
sensibilità angolare, che è in un pendolo di torsione quella più importante per la misura delle forze, viene considerevolmente migliorata.
La configurazione geometrica standard del dispositivo prevede una distanza D = 172mm tra la testmass ed il fotodiodo, L = 32mm tra la test-mass e lo specchio, ed un angolo di incidenza iniziale del
fascio Û = 5.5°. Tali scelte sono giustificate dalle seguenti considerazioni:
• riduzione dell’accoppiamento tra la traslazione x e la rotazione η della test-mass (con riferimento agli assi di Figura 32);
• minimizzazione della sensibilità rispetto allo spostamento x;
• dimensioni dell’apparato contenute in modo da poter essere compatibile con la facility
del pendolo;
• uguaglianza tra la variazione di distanza e lo spostamento verticale del beam sul fotodiodo;
• la distanza complessivamente percorsa dal fascio è di 311 mm e quindi la dimensione del
fascio resta contenuta (circa 0.4 mm di diametro).
Figura 32: Convenzione degli assi del MRORO su pendolo di torsione e immagine reale dello strumento.
Il fotodiodo a quadrante, di cui discuteremo in dettaglio nella sezione 5.3, è movimentato da due
motorini PI M-110 Compact Micro-Translation Stage, nelle due direzioni orizzontale e verticale. Il
minimo spostamento del motore è di 7 nm in un range totale di spostamento di circa 5 mm.
Il sensore MRORO è stato sviluppato e testato a Napoli con un set-up rigido ed in seguito integrato
sul pendolo di torsione presso l’Università di Trento secondo le schema presente in Figura 33.
74
Figura 33: Schema del membro inerziale del pendolo di torsione. Intorno alle masse 1 e 2 sono posizionati
i sensori capacitivi. Intorno alla massa 3 è posto il sensore ottico MRORO.
Per le successive discussioni, utilizzeremo come sistema di riferimento per il MRORO, quello in Figura 32. Ricordiamo che il pendolo di torsione ha differenti modi normali di oscillazione, corrispondenti a rotazioni φ (modo torsionale) e η (modo oscillante). Quindi, esso può ruotare attorno
all’asse della fibra e può anche traslare (oscillazioni) rispetto al punto di sospensione.
5.2 Il modello geometrico del sensore
Dal punto di vista geometrico, la configurazione del sensore MRORO permette di misurare sul
fotodiodo una traslazione o una rotazione della test-mass, traducendo lo spostamento del fascio
sul fotodiodo in uno spostamento in metri della test-mass o in radianti corrispondente.
Se la massa trasla, il fascio subisce uno spostamento mantenendo lo stesso angolo di incidenza,
mentre, se la test-mass ruota, il fascio subirà ad ogni riflessione un incremento angolare, che si
traduce in un guadagno in termini di spostamento dello spot sul fotodiodo. Vediamo geometricamente che entità hanno gli spostamenti relativi.
5.2.1
Traslazione
Una traslazione della test mass lungo l’asse x genera uno spostamento Δ¶ del fascio lungo
l’asse verticale y. Si vuole calcolare lo spostamento verticale Δ¶ che subisce il fascio corrisponden75
te ad una traslazione Δ-V@ della test mass. Se per semplicità consideriamo una singola riflessione,
allora possiamo scrivere
ï = ∙ tan /
dove B è la base del triangolo rettangolo la cui ipotenusa è il raggio incidente del fascio, L è la distanza tra la test mass e lo specchio ed η è l’angolo di incidenza.
La base del triangolo isoscele, formato dal raggio incidente e da quello riflesso, sarà invece uguale
a
2ï = 2 ∙ tan /
e quindi dopo n riflessioni possiamo scrivere la base totale
ïFF = 2 ∙ tan / ∙ .
E’ facile notare che uno spostamento della test-mass Δ-V@ genera uno spostamento del fascio, e
quindi la nuova base del singolo triangolo sarà
ï Ã ≈ 2O + Δ-V@ P ∙ /,
mentre la nuova base totale sarà
Ã
ïFF
≈ 2O + Δ-V@ P ∙ /.
A questo punto lo spostamento del fascio sarà dato semplicemente dalla differenza tra la nuova
base totale, cioè quella ottenuta in seguito allo spostamento della test-mass, e quella iniziale
Ã
− ïFF = 2Δ-V@ ∙ tan /.
Δ¶FF = ïFF
Questa quantità rappresenta uno spostamento verticale del fascio, senza tener conto del fatto che
il fotodiodo è inclinato anch’esso di un angolo η. Lo spostamento del fascio sul fotodiodo sarà dato
semplicemente da
Δ¶áµ = Δ¶FF cos / = 2Δ-V@ ∙ sin /.
5.2.2
Rotazione
In questa sezione tratteremo il caso della rotazione della test mass intorno all’asse orizzontale. Poiché si è in presenza di piccole rotazioni Δ/ ≪ /, ci si può mettere nell’approssimazione secondo la quale, in seguito ad una rotazione, i fasci riflessi avranno tutti quanti lo stesso percorso
ottico. Nel caso della rotazione, il sensore è in grado di raggiungere una maggiore sensibilità dovuta al fatto che ad ogni riflessione otteniamo un guadagno in angolo (cioè l’angolo di riflessione
aumenta). Se l’angolo di incidenza è η, per una rotazione della test mass di un angolo Δ/ il fascio
riflesso sarà inclinato di un angolo / + 2Δ/ ed inciderà sullo specchio in un punto che si trova più
sopra rispetto a quello in assenza di rotazione. Se indichiamo con Δ¶ la differenza tra i due punti,
cioè lo spostamento verticale subito dal fascio, in seguito ad un singola rotazione otteniamo
Δ¶ = 2 ∙ Δ/,
mentre, dopo la seconda riflessione, si ha
Δ¶ = 8 ∙ Δ/.
Procedendo in maniera iterativa, si giunge alla formula per n riflessioni
76
Δ¶ = 2 ∙ Δ/ ∙ ,
che indica che il guadagno, inteso come spostamento del fascio, va come . Ovviamente il Δ¶ calcolato è lo spostamento del fascio all’altezza dello specchio, mentre il fotodiodo si trova ad una distanza D dalla test mass. Quindi l’incremento verticale aggiuntivo del fascio dovuto al fatto che il
fotodiodo si trova ad una distanza D è
10.
∆¶ó = e« −
g sinO/ + 2Δ/P − e« −
g sin /,
cos /
cos /
che andremo ad aggiungere allo spostamento totale
11.
∆¶FF = 2 OΔ/P + e« −
g sinO/ + 2Δ/P − e« −
g sin /.
cos /
cos /
Come in precedenza, bisogna tener conto del fatto che il fotodiodo è inclinato di un angolo η, e
quindi il Δ¶ sul fotodiodo sarà
Δ¶ôµ = Δ¶FF cos /.
Applicando le formule di addizione alla relazione (10.) si ha
g Lsin / cos 2 Δ/ + cos / sin 2 Δ/Q − e« −
g sin /
Δ¶ó = e« −
cos /
cos /
e sostituendola nella (11.) e sviluppando al primo ordine rispetto a Δ/
Δ¶FF = 2 OΔ/P + e« −
g cos / ∙ 2OΔ/P,
cos /
da cui otteniamo lo spostamento sul fotodiodo del fascio multiriflesso n volte
g cos / ∙ 2¾ cos / ∙ OΔ/P.
Δ¶ôµ = ½2 + e« −
cos /
Per la rotazione φ intorno all’asse verticale, lo spostamento del fascio sul fotodiodo è dato dalla
formula:
Δôµ = ½2 + e« −
g ∙ 2 cos /¾ ∙ OΔP.
cos /
Le misure effettuate in laboratorio sono in accordo con tali risultati analitici.
Il guadagno geometrico è dato quindi da 9 = ∆¶ôµ ⁄∆/ e in Tabella 1 vediamo il vantaggio procurato dalle 5 riflessioni rispetto al caso di singola riflessione, lasciando invariati gli altri parametri.
Per quanto riguarda la rotazione intorno all’asse verticale, che è quella che più ci interessa per le
misure sul pendolo, la risposta ricavata da misure in laboratorio è ≈ 2.7 ± 0.6 ⁄ , che è
confrontabile con quella ottenuta per via analitica ≈ 2.9 ⁄ (31).
77
Éáó ⁄
[rad/m]
ÀÉáó ⁄/
[rad/m]
ÀÉáó ⁄-
n=1
n=5
Gain
0.342
2.992
8.738
0.341
2.978
8.738
0.192
0.958
5
Tabella 1: In tabella è mostrata la risposta geometrica del sensore ad una rotazione o traslazione della
test-mass sviluppata al primo ordine. ëö÷ø e ùö÷ø sono le posizioni verticali ed orizzontali del fascio sul
fotodiodo, φ è la rotazione della test-mass intorno all’asse verticale, η quella intorno all’asse orizzontale
x, mentre y è la traslazione. Dai risultati numerici si può vedere che c’è un guadagno rispetto al caso di
singola riflessione di un fattore 8.7 per le rotazioni e 5 per le traslazioni. I risultati ottenuti sono stati ricavati utilizzando i parametri L, D, e α di progetto (31).
5.3 Il fotodiodo a quadrante
I fotodiodi sono sensori ottici a semiconduttore in grado di fornire un segnale elettrico di corrente proporzionale alla potenza luminosa incidente sulla superficie.
Come dispositivo fotoconduttore, il fotodiodo è costituito da un diodo p-n polarizzato inversamente, in cui la tensione di uscita viene sviluppata ai capi di una resistenza di carico in serie. Quando la
giunzione viene illuminata, le coppie elettrone-lacuna generate nel semiconduttore per effetto fotoelettrico, sono trasportate verso il circuito di lettura dalla tensione inversa applicata ai lati della
giunzione.
L’efficienza nella produzione delle cariche è legata alla profondità della zona di svuotamento della
giunzione p-n, mentre, l’efficienza quantica di questi dispositivi dipende dalla lunghezza d’onda
della luce incidente della luce incidente.
Per le misure effettuate con il sensore MRORO, viene utilizzato un fotodiodo a quadrante (QPD) di
tipo PIN e modello S4349 della Hamamatsu. Questo è un dispositivo costituito da quattro fotodiodi quadrati di tipo PIN di lato 1.5 mm, come vediamo in Figura 34. Tra i quattro quadranti si ha una
gap a croce di 0.1 mm.
78
Figura 34: A sinistra, schema dimostrativo del fotodiodo a quadrante. A destra il fotodiodo Si PIN S4349.
I fotodiodi di tipo PIN sono costituiti da una giunzione p-n in cui è inserito un materiale a scarso
drogaggio, che costituisce una regione intrinseca i al suo interno. Ciò permette di aumentare la
dimensione della regione di svuotamento e, di conseguenza, aumentare l’assorbimento della luce
prodotta. La parte frontale del quadrante è coperta da uno strato antiriflettente.
In particolare, questo modello di sensore è sensibile nel range spettrale 190 – 1000 nm, quindi
dall’UV all’infrarosso, con sensibilità di picco a 720 nm e responsività corrispondente ÛOP =
_ôµ ⁄¢' = 0.45 I⁄£ , definita come il rapporto tra la fotocorrente prodotta e la potenza ottica incidente.
Il formato a quadrante permette una sensibilità del dispositivo nella misura dello spostamento. Si
riesce a capire di quanto si sposta un fascio laser incidente, analizzando i segnali in uscita. Il QPD
presenta, infatti, quattro segnali d’uscita, ognuno proveniente da uno dei quattro quadranti.
Quando il fascio è focalizzato al centro del fotodiodo, si misura la stessa corrente su tutti e quattro
i quadranti, mentre, se il fascio è spostato rispetto al centro, le correnti prodotte dai quattro quadranti saranno diverse.
Figura 35: Confronto tra i segnali in uscita dai quattro quadranti del fotodiodo a seconda della posizione
sul quadrante dello spot incidente.
Il confronto tra i quattro valori di tensione in uscita, permette di capire la posizione dello spot sul
quadrante. E’ utile fare questa analisi utilizzando un amplificatore operazionale per operare il confronto tra i segnali. Questo genera sette segnali in uscita: quattro di loro sono i segnali in Volt provenienti dai singoli quadranti del fotodiodo, e gli altri tre sono speciali combinazioni di questi.
79
In riferimento alla Figura 34, indichiamo con À , À, À
e À i quattro segnali dei quadranti. Le loro
combinazioni ottenute in uscita dall’amplificatore sono:
¬ = À + À + À
+ À
= À + À
− OÀ + À P
À = À + À − OÀ
+ À P
e rappresentano i segnali in Volt corrispondenti rispettivamente alla potenza totale incidente sul
fotodiodo, alla posizione orizzontale e verticale dello spot del laser rispetto al centro del fotodiodo. I segnali acquisiti saranno, dunque, il segnale somma S, l’orizzontale H (il segnale x del fotodiodo -ôµ ) e il verticale V (¶ôµ ).
Il guadagno dell’amplificatore è proporzionale alla resistenza di carico, che, nel nostro caso, è pari
a $® = 87hΩ.
5.3.1
Acquisizione e segnali
Il modo in cui è montato il sensore ottico sul pendolo di torsione rispetto agli altri due sensori, come si vede dalla Figura 33, permette di misurare traslazioni della test-mass lungo l’asse x e rotazioni intorno agli assi y e z. Una traslazione x della test-mass provoca uno spostamento del fascio
laser lungo l’asse verticale del fotodiodo. Lo stesso vale per una rotazione η (modo oscillante del
pendolo), intorno all’asse z. Una rotazione φ intorno all’asse y (modo torsionale del pendolo), invece, genera uno spostamento orizzontale del fascio sul QPD.
Una rotazione φ del pendolo genera una rotazione φ della test-mass intorno al suo centro di massa, più una traslazione ´ ∙ , della stessa, lungo l’asse x (Figura 33). Per distinguere i due movimenti, si utilizzano i segnali degli altri due sensori sul pendolo, FMR e STC. Queste considerazioni ovviamente valgono se ci fermiamo al primo ordine di approssimazione e trascuriamo gli accoppiamenti tra i vari gradi di libertà.
I segnali orizzontale H e verticale V del fotodiodo, ci permettono di ricostruire i movimenti della
test-mass. I segnali normalizzati ! = ⁄¬ e À! = À ⁄! costituiscono i dati che saranno poi processati. Poiché si è interessati a studiare il livello di rumore del sensore MRORO, andremo ad analizzare la power spectral density dei segnali orizzontali e verticali del fotodiodo, con i metodi descritti in appendice A.
5.3.2
Sorgenti di rumore
Per valutare la sensibilità del sensore ottico MRORO, è necessario considerare il rumore che
esso presenta nella banda di interesse per le misure.
80
Ogni sensore ottico è limitato dallo shot noise, la cui origine, come si è detto, è dovuta alle fluttuazioni casuali del numero di fotoni incidenti sul rivelatore. Tali fluttuazioni generano un rumore in
corrente _ú che si aggiunge alla corrente prodotta dal fotorivelatore _úáµ , e che corrisponde ad un
rumore in spostamento dello spot sul fotodiodo descritto dalla formula:
_ú
830 ⁄ 1£ ⁄ 0.78 ⁄
- =
≈ 2.8 ∙ 10 e
g e
g e
g e
g û ⁄ ü
|_áµ ⁄- |
¢'
/
1
dove λ e ¢' sono lunghezza d’onda e potenza del laser, rispettivamente, η è l’efficienza quantica
del rivelatore e L è il range di misura (che dipende dalla dimensione dello spot sul quadrante del
fotodiodo). Si può dire, considerati numeri ragionevoli per i parametri rilevanti, che, per il sensore
ottico, il limite per lo shot noise sia ben al di sotto delle specifiche (32).
La corrente di shot noise è data da _ú = ý2_áµ J, dove e è la carica elettrica dell’elettrone. La corrente del fotodiodo si può calcolare in termini della potenza del fascio laser ¢' e della responsività
del fotodiodo ÛOP come _áµ = ÛOP¢' .
Un’altra importante sorgente di disturbo è la corrente di rumore _ dell’amplificatore a transimpedenza usato per leggere la corrente del fotodiodo. Questa può essere espressa alle basse frequenze, dalla relazione:
t' _ ≃ _' e g
t
dove _' = 1.7 KI⁄√ a t' = 10, che è un tipico valore per i dispositivi operazionali usati
(Analog Device OP27EP). Se si hanno N stadi di ingresso, il rumore in corrente totale sarà dato da:
⁄
_VF = √!_ .
Per il sensore qui utilizzato il numero dei segnali è N = 4. In termini di rumore di spostamento dello
spot, il rumore elettronico impone un limite in sensibilità dato da:
2 ⋅ _ú OtP
-þ =
≈
Û OP ∙ ¢'
12.
_ú O1P 0.43I£ 1£ 1 ⁄
'
⁄
≈ 4.2 ∙ 10
^
`
^
`
e
g
e
g
e
g
û
ü
1.7 ∙ 10'
ÛOP
¢'
t
1
dove L è il range di misura, che nel caso del QPD, rappresenta il diametro dello spot (32).
Come per lo shot noise, anche in questo caso la sensibilità dipende dalla potenza del laser e dal
range delle misure. Mentre, a differenza dello shot noise, che è un rumore bianco, quello elettronico dipende dalla frequenza come 1⁄t ⁄ . Questa sorgente di rumore è il fattore maggiormente
limitante alle frequenze di interesse, per il sensore basato su una leva ottica.
81
5.3.3
Caratterizzazione del rumore elettronico del fotodiodo
Durante il lavoro di tesi, mi sono occupata della caratterizzazione del rumore elettronico del
fotodiodo a quadrante S4349 al variare della potenza della luce incidente. Questo studio è stato
effettuato a Napoli con un set-up costituito soltanto dal fotodiodo posto su un supporto rigido, e
da una sorgente laser di lunghezza d’onda = 830, accoppiata ad una fibra ottica single-mode
con collimatore a microlente. Tali elementi sono del tutto identici a quelli presenti nel set-up del
sensore ottico MRORO presso i laboratori di Trento, con la differenza di avere il fascio laser direttamente inviato sulla superficie del fotodiodo. L’amplificatore usato per la combinazione dei segnali in uscita, invece, utilizza la stessa configurazione, ma con una resistenza di carico $® =
68hΩ. Ciò è stato tenuto in conto nell’analisi e nel confronto dei dati con quelli del rumore elettronico del set-up sul pendolo di torsione.
Figura 36: Schema del set-up usato per le misure di rumore su banco a Napoli.
Lo scopo di queste misure è quello di verificare l’andamento del rumore elettronico del fotodiodo
al variare dell’intensità della luce del laser imposta in ingresso e confrontarlo con quello teorico. Ci
si aspetta che la tendenza rispetti la pendenza 1⁄t ⁄ , tipica del rumore elettronico, anche per
potenze incidenti molto basse, ed inoltre, che decresca come 1⁄¢.
Le misure sono state acquisite con il sistema ONOSOKKI, un analizzatore di spettro con quattro canali di acquisizione a 16 bit. Su tre di questi sono stati posti i tre segnali provenienti
dall’amplificatore. In questo strumento il numero di campioni N e la frequenza di campionamento
t%
utilizzati,
sono
relazionati
al
range
di
frequenze
dalla
relazione
t% = 2.56 × $2JMtJÚJ. Inoltre è necessario stabilire un intervallo di misura accettabile
per ogni canale di acquisizione, per poter sfruttare le dinamiche dello strumento, stando attenti ad
una possibile saturazione dei canali dovuta a drift nei segnali orizzontale e verticale per lunghi
tempi di misura.
82
I segnali acquisiti sono delle serie temporali digitali fatte di N campioni alla frequenza di campionamento t% . Nel nostro caso si è scelto un range di frequenze di 2 con N = 16384, che corrispondono a misure di durata 3200 s. I segnali sono poi trasferiti ad un PC e processati con il software Matlab.
Dopo aver verificato che nessun canale abbia saturato il range di misura durante il tempo di acquisizione, si può cancellare il contributo delle fluttuazioni di potenza del laser dai segnali verticali e
orizzontali normalizzando H e V con il segnale somma S (Figura 37).
Figura 37: Confronto tra il segnale normalizzato (verde) e non normalizzato (blu). La normalizzazione cancella le fluttuazioni di potenza laser.
L’acquisizione dei tre segnali è stata effettuata per diversi valori della corrente fornita al laser. Si è
partiti da una tensione somma in uscita di circa 8 V, dimezzandone il valore ad ogni misura fino ad
un minimo di circa 35 mV. La potenza corrispondente a tali valori in tensione somma, varia quindi
in un range che va da 326}£ fino a 1.28}£, secondo la relazione che le collega:
¬
¢=
.
ÛOP ∙ $®
Per la lunghezza d’onda utilizzata, la responsività del fotodiodo è ÛOP = 0.4 I⁄£ .
83
Lo studio del livello di rumore del fotodiodo presuppone l’utilizzo della densità di potenza spettrale dei segnali orizzontale e verticale, come spiegato in appendice A.
Per prima cosa vediamo l’andamento del rumore elettronico dell’amplificatore del fotodiodo ottenuto facendo una misura a laser spento. Dalla Figura 38 è possibile vedere che la densità spettrale
di potenza del rumore misurato ha l’andamento previsto dall’equazione (12.), 1⁄t ⁄ . Questo è
riprodotto molto bene dalla densità spettrale di rumore della misura effettuata.
Figura 38: Confronto della densità di potenza spettrale del rumore elettronico misurato con quello teorico.
In Figura 39, invece, è presentato il confronto tra i rumori elettronici ottenuti al variare della potenza ottica incidente sul fotodiodo. Si nota come, al crescere della potenza, il livello di rumore si
abbassi. Per le misure ottenute a potenza più alta, rispettivamente, 326}£ e 140}£, i rumori si
sovrappongono. Ciò è indice del fatto che, oltre un certo limite, non è possibile migliorare la sensibilità per questo strumento aumentando la potenza ottica della luce incidente. Si presuppone ci
sia la presenza di una fonte aggiuntiva di rumore non ben identificata a porre questo limite superiore.
84
Figura 39: Confronto tra le densità di potenza spettrale per diverse misure ottenute con potenze incidenti
di 326 µW, 140 µW, 18 µW, 5.16 µW e 1.28 µW.
Nello specifico, si può vedere questo effetto per le potenze ottiche incidenti utilizzate più bassa
(Figura 40) e più alta (Figura 41), nel confronto col rumore elettronico teorico e con lo shot noise.
Man mano che la potenza aumenta, il disaccordo con il rumore elettronico è maggiore. In entrambi i casi lo shot noise è al di sotto della sensibilità raggiunta e non produce ulteriori effetti sul rumore misurato.
85
Figura 40: Rumore ottenuto per la misura con potenza ottica incidente di æ. åí. Vengono confrontate
le densità di potenza spettrale del rumore elettronico dell’amplificatore e del fotodiodo illuminato, con
l’andamento teorico che va come æ⁄æ⁄å .
Figura 41: Rumore ottenuto per la misura con la potenza ottica incidente più alta utilizzata nelle misure
su banco, di å. Vengono confrontate le densità di potenza spettrale del rumore elettronico
dell’amplificatore e del fotodiodo illuminato, con l’andamento teorico che va come æ⁄æ⁄å.
86
Nella successiva analisi, si è considerato, per ogni misura, l’intervallo di frequenze tra 50 e 200
mHz, entro il quale lo spettro segue bene l’andamento atteso (1⁄t ⁄ ). In questo intervallo, si è
osservato l’andamento del rumore elettronico misurato, rispetto alla potenza ottica incidente. Per
ogni potenza, il logaritmo del rumore misurato nell’intervallo di frequenza indicato viene fittato
con una retta (in accordo al modello). Il punto riportato nel grafico è quello ricavato dal fit per
t = 100; l’errore è dato dalla varianza rispetto al fit.
Figura 42: Andamento degli spettri di potenza del rumore elettronico alle diverse potenze utilizzate. Ad
alte frequenze e basse potenze si ha l’accordo con l’andamento teorico æ⁄÷. A potenze maggiori di
~Y inizia uno scostamento dall’andamento previsto.
Come si vede in Figura 42, l’andamento del rumore al variare della potenza misurata segue, a bassa potenza, quello teorico 1⁄¢, mentre, a potenze maggiori di ~50}£, inizia a discostarsi in maniera significativa. Ciò è dovuto alla presenza di altre sorgenti di rumore ancora da identificare, che
diventano preponderanti su quello elettronico.
87
5.4 Back-action del sensore MRORO
Come si è detto, per raggiungere la sensibilità di LISA, il rumore di accelerazione delle testmass dovuto alle forze spurie deve essere tenuto al di sotto di 3 ∙ 10 ⁄ ⁄ sotto i 3 mHz.
Ciò significa che, per una massa di prova di 2kg, la densità di potenza spettrale delle forze spurie
non deve superare il valore 6 ∙ 10 ! ⁄√.
Il sensore ottico MRORO esercita una forza spuria sulla massa di prova essenzialmente dovuta alle
fluttuazioni della potenza della luce incidente.
Siano à la forza della pressione di radiazione e P la potenza della luce incidente. Queste sono legate dalla relazione
2ℎ
2¢
à =
cos Ä =
cos Ä,
*
*
dove β è l’angolo con cui incide il fascio laser sulla superficie della massa di prova, per una singola
riflessione ed n è il numero dei fotoni incidenti. Per le cinque riflessioni previste per il sensore
MRORO, si ha una forza incidente pari a à = O10¢ cos ÄP⁄* . Quindi, si richiede, per la stabilità
della potenza del laser del sensore MRORO, in cui Ä = 5.5°
à ≤ 10 ¢ cos Ä ⁄* ≤ 6 ∙ 10 !⁄√,
ovvero una fluttuazione della potenza incidente
¢ ≤ 2.54 ∙ 10) £ ⁄√.
5.5 L’allineamento del sensore MRORO
Il primo passo per eseguire le misure sul sistema MRORO, consiste nell’allineare il sensore
con quello capacitivo. Il processo di allineamento ha lo scopo di trovare una posizione nella quale
tutti i sensori misurino un segnale pressoché nullo nella situazione in cui le masse si trovino nella
loro posizione nominale. Naturalmente questa procedura può essere effettuata con una precisione limitata: una discrepanza di pochi } tra le misure dei sensori è accettabile.
L’allineamento del sensore MRORO viene eseguito quando il membro inerziale si trova poggiato su
un banco, agganciato allo stesso piatto di alluminio cui sono posti gli altri (Figura 27), che poi verrà
inserito nella camera da vuoto. La procedura avviene subito dopo quella effettuata per i due sensori capacitivi, già descritta nella sezione 4.3.4.
L’allineamento consiste principalmente nel raggiungere le caratteristiche geometriche di progetto
in Figura 31 e verificare che sulla test-mass si vedano le cinque riflessioni previste. Ciò avviene
spostando le tre viti di regolazione del supporto che sostiene lo specchio e la fibra ottica. Queste
permettono sia la rotazione che l’inclinazione del supporto, e quindi anche del fascio laser, grazie
anche alla presenza di piccole molle che fungono da tiranti. La posizione del fascio e la presenza
88
delle riflessioni va controllata con un visore sensibile alla radiazione infrarossa, per assicurarsi che
non ci siano diaframmazioni del fascio o luce diffusa sui bordi della struttura in alluminio. Una volta che si è raggiunta la posizione prevista, si procede al bloccaggio del sistema con le apposite viti
e al centraggio del fascio sul fotodiodo utilizzando i motorini micrometrici che operano nelle direzioni verticale ed orizzontale.
Il bloccaggio finale della struttura in alluminio che mantiene specchio e fibra, garantisce la stabilità
nelle fasi successive di posizionamento della plancia nella camera da vuoto e la successiva sospensione del pendolo.
Il range entro sui si è sicuri che il centraggio sia corretto, al termine dell’allineamento, è di
±0.75$ corrispondenti ad uno spostamento massimo di ±1.25 all’interno del foro di
raggio 5 mm, posto subito sopra lo specchio, attraverso il quale passa il fascio riflesso dalla testmass e diretto sul fotodiodo. Invece, il limite di centraggio dello spot del fascio al centro del fotodiodo a quadrante, si raggiunge quando i segnali orizzontale H e verticale V sono vicini allo zero
entro un centesimo della tensione somma S.
5.6 La calibrazione
Una volta che si è concluso l’allineamento del sensore MRORO, si procede con l’operazione
di calibrazione. Questa permette di verificare il corretto allineamento del sistema, ma soprattutto
di determinare i fattori di calibrazione che permettono di trasformare i segnali dal valore di tensione misurato in Volt, a quello corrispondente in metri. Questi fattori permettono di ricavare lo
spostamento in metri della massa a partire da quanto si è spostato lo spot sul fotodiodo.
Il fattore di calibrazione che permette di convertire le tensioni normalizzate in spostamenti in metri dello spot di luce è definito come:
¬J2äJ\äM+\Jät\+\M\\
Øáµ =
L Q.
¬K\+J+\Jää\K\+Mä*J
Il fattore di calibrazione legato allo spostamento della test-mass è definito come:
¬J2äJ\äM+\Jät\+\M\\
ØV@ =
L Q,
¬K\+J+\Jää+J+ − da cui si può calcolare lo spostamento della massa corrispondente ai segnali e À nel tempo. I
due fattori sono messi in relazione da un significato geometrico. Come si vede in Figura 43, nel caso semplice in cui si abbia una sola riflessione sulla massa, lo spostamento della test-mass «-V@
corrisponde ad uno spostamento orizzontale «-áµ dello spot sul fotodiodo, tramite la relazione
geometrica:
«-áµ = 2 sin ∙ «-V@ = √2 ∙ «-V@ .
Corrispondentemente, i due fattori di calibrazioni sono messi in relazione da:
ØV@
Øáµ =
,
2 sin 89
dove θ è l’angolo di incidenza del fascio di luce sulla superficie riflettente della massa.
Figura 43: Spostamento della test-mass rispetto allo spostamento sul fotodiodo.
La calibrazione è stata eseguita subito dopo la fase di allineamento del sensore, con il sistema posto su un banco, seguendo la seguente procedura. Si allinea il sensore in modo tale che lo spot sia
approssimativamente al centro del QPD, con ≈ 0À e À ≈ 0À. In seguito vengono effettuati degli spostamenti del fotodiodo utilizzando i motorini guidati in remoto, effettuando step di 70}
cadenzati, partendo dalla posizione estrema per arrivare a quella opposta, per uno spostamento
totale di 2 mm. Questa procedura viene fatta sia per spostamenti verticali che orizzontali del fotodiodo.
In Figura 44 vediamo il segnale orizzontale nel tempo. Si notano gli step eseguiti a cadenze temporali di circa 10 s. Misure analoghe sono eseguite sull’asse verticale, ma non vengono qui mostrate.
Figura 44: Spostamenti nel tempo dello spot sull’asse orizzontale del fotodiodo.
90
Per trovare il fattore di calibrazione si fa passare una curva interpolante per i punti medi di ogni
step utilizzando Matlab, e poi si calcola la derivata nel punto di flesso, dove la risposta del fotodiodo è lineare (Figura 45). Il valore della derivata fornisce il fattore di calibrazione del fotodiodo.
Figura 45: Spostamento orizzontale dello spot sul fotodiodo in metri. La curva passa per i punti medi di
ogni step. La derivata nel punto V = 0 del polinomio che descrive la curva fornisce il coefficiente di calibrazione.
Come si vede dalle figure, la scansione orizzontale del fotodiodo ha prodotto una curva simmetrica
e ben centrata, sintomo del corretto allineamento del sistema. Anche in verticale si è ottenuto lo
stesso grado di simmetria.
I fattori ricavati dopo l’attuale allineamento dello strumento sono: O1.90 ± 0.01P · 10
, per
l’orizzontale e O1.62 ± 0.01P ∙ 10
per il verticale.
Infine, gli spostamenti «-áµ° e «¶áµ
dello spot di luce lungo gli assi del rivelatore possono essere ottenuti come:
«-áµ =
LQ
Øáµ°
À
«¶áµ =
LQ.
Øáµ
91
5.7 Le misure sul pendolo di torsione
Dopo aver concluso la fase di assemblaggio, di allineamento e calibrazione, il pendolo è pronto per essere sospeso. In questo lavoro non è presentata la procedura di sospensione del pendolo,
invece vedremo una breve descrizione delle tecniche usate per allineare il pendolo sospeso a tutti
i sensori, in modo tale che esso rimanga in quella posizione per un periodo di tempo tale da permettere di effettuare misure in bassa frequenza (che sono quelle a cui si è interessati).
Il pendolo può essere regolato cambiando l’angolo torsionale d’equilibrio ' ruotando il supporto
al quale è sospesa la fibra del pendolo. La camera da vuoto può essere inclinata svitando e avvitando i piedi che la sostengono. In questo modo si può regolare il punto di equilibrio del pendolo
rispetto ai sensori (solidali alla camera). E’ anche possibile produrre un rotazione φ del pendolo
per mezzo degli attuatori elettrostatici sulla test mass. Per generare oscillazioni di ampiezza maggiore è possibile intervenire dall’esterno sollecitando meccanicamente la piattaforma su cui poggia
la camera da vuoto. Inoltre è possibile ruotare e traslare la piattaforma che sostiene i sensori, per
regolare la posizione degli stessi rispetto alle test-mass.
Il centraggio del pendolo è un’operazione estremamente delicata che richiede molto tempo e pazienza. Grazie al sistema di acquisizione in tempo reale, osservando i segnali sul monitor si possono effettuare un serie di azioni sul pendolo fino a quando ogni segnale non si trova nel suo range
di misura.
Per quanto riguarda l’amplificatore del fotodiodo, questo può essere usato in scientific mode, cioè
amplificando il segnale di un fattore 10, in modo tale che non viene più utilizzato l’intero range di
misura, ma solo la parte centrale. In questo modo si migliora la risoluzione del sistema di acquisizione dati, ma le condizioni di centraggio diventano molto più stringenti. Questo vuol dire che le
oscillazioni devono essere molto piccole ed i sensori ragionevolmente centrati, altrimenti i segnali
non saranno misurabili per un periodo di tempo sufficiente in quanto raggiungeranno molto presto la saturazione, e questo vale in modo particolare per il sensore MRORO.
5.7.1
La calibrazione dei segnali
I segnali dei tre sensori ora sul pendolo, MRORO, STC e FMR, vanno calibrati tra loro usando i
segnali dell’autocollimatore, corrispondente al modo torsionale del pendolo e / corrispondente al modo oscillante.
Per calcolare i fattori di calibrazione si considerano le differenti frequenze di risonanza corrispondenti ai vari modi del pendolo. Queste dipendono dal tipo di pendolo e dalle sue caratteristiche. In
riferimento ai dati presi sulla facility in ottobre 2009, il picco in frequenza associato al modo tor92
sionale ha frequenza t ≈ 0.72, mentre il modo oscillante ha frequenza di picco t ≈
0.45.
I fattori di calibrazione relativi a φ e a η per i singoli sensori, sono stati calcolati seguendo la procedura descritta di seguito.
5.7.1.1
Φ-MRORO
Si assume che alla frequenza t il moto del pendolo sia dominato dal modo normale φ.
Quindi si calibra il segnale orizzontale del MRORO, che dà una misura di φ, rispetto al segnale
dell’autocollimatore , alla frequenza di risonanza. In sostanza, poiché il segnale
dell’autocollimatore è già calibrato, si vuole trovare quel fattore per il quale dividere il segnale del
MRORO, in modo tale che la PSD di quest’ultimo abbia lo stesso valore della PSD
dell’autocollimatore alla frequenza di risonanza. Il fattore di calibrazione allora sarà:
±
` L Q
ØË@àà = ^
¹
± e sono rispettivamente le PSD dei segnali MRORO orizzontale e AC.
dove In questo modo, il segnale orizzontale del MRORO calibrato sarà dato semplicemente da:
@àà =
LQ.
ØË@àà
5.7.1.2
Φ-FM
Data la geometria del sistema Figura 31, i due canali capacitivi e sono sensibili alle traslazioni lungo Z e alle rotazioni φ. Come per il MRORO, assumiamo che il moto del pendolo alla
frequenza t sia dominato dalla rotazione φ. Il segnale @ viene ottenuto dalla semidifferenza
dei segnali e , che vanno calibrati singolarmente poiché le due coppie di elettrodi Z possono
avere fattori di calibrazione diversi. Quindi il fattore di calibrazione è:
"
ØË" = ^
` L QOM = 1,2P.
Il segnale φ calibrato sarà:
¹
1
@ = ^ − `LQ.
2 ØË ØË
93
5.7.1.3
η-MRORO
Per il grado di libertà η si segue la stessa procedura di φ, cioè si assume che alla frequenza t
tutto il moto sia dovuto al modo normale η. Quindi il fattore di calibrazione è:
À
` L Q,
Ø@àà = ^
/
/@àà =
5.7.1.4
D
À
da cui si ottiene il segnale calibrato:
Ø@àà
LQ.
η-FM
Il grado di libertà η si ottiene dalla differenza dei segnali FM ¸ e ¸ . Per tenere conto della
differente calibrazione tra i due canali, conviene considerare il moto a frequenza t , dove lo spostamento della test-mass è uguale sulle due coppie di elettrodi (cosa non ovvia alla frequenza t
essendoci degenerazione tra η e x). In questo caso calibriamo quindi i singoli segnali ¸ e ¸ sulla
risonanza φ:
¸"
Ø"
¹ = ^
` L QOM = 1,2P,
/
da cui otteniamo
Δ¸@ =
1
¹
Ø"
¹
O¸ − ¸ PLQ.
Una volta ottenuto il segnale Δ¸@ , che rappresenta η, se ne fa la PSD e la si calibra sul picco a t ,
ottenendo il fattore di calibrazione:
Δ¸@
Ø = ^
` L Q,
/
D
da cui:
5.7.1.5
/@ =
Δ¸@
LQ.
Ø
X-FM
Assumiamo che alla frequenza t il moto traslazionale X sia tutto dovuto alla rotazione φ e
non a spostamenti del centro di massa del pendolo. Per calibrare utilizziamo il segnale ¸ , così
definito:
94
¸ = ´ ∙ LQ,
dove b è il braccio del pendolo.
Ognuno dei due elettrodi X dell’FM misura indipendentemente il grado di libertà X della test mass
1. Come al solito assumiamo che alla frequenza t i canali ¸ e ¸ dipendono in buona approssimazione solo dalle rotazioni φ, piuttosto che da quelle η. Calibriamo quindi separatamente ¸ e ¸
rispetto a :
¸"
¸"
"
ØÖ" = ^
` L Q ⇒ ¸@
= " LQM = O1,2P.
¸
ØÖ
¹
A questo punto possiamo ottenere il segnale traslazionale ¸@ calibrato, facendo la media dei due
"
canali ¸@
:
1 PLQ.
¸@ = O¸@
+ ¸@
2
5.7.1.6
X-STC
I due elettrodi X dell’STC ci permettono di misurare il grado di libertà X della test-mass 2 Figura 31. Il fattore di calibrazione si ottiene dal segnale dell’autocollimatore ¸ definito prima, per
cui:
¸V×
ØÖ = ^
` L Q,
¸
¹
dove ¸V× è la PSD dei segnali provenienti dai canali X dello STC. Il corrispondente segnale calibrato sarà:
¸V×
¸V =
LQ.
ØÖ
5.7.2
Risultati delle misure di ottobre 2009
Riportiamo i risultati delle misure effettuate nel periodo di ottobre 2009, su pendolo di torsione a quattro masse, presso il laboratorio di Trento, relativi al sensore MRORO e confrontati con
quelli dei sensori capacitivi.
Bisogna tener presente che, in questa fase di testing del sensore MRORO, si è riscontrato un problema di scarsa riflettività della superficie della test-mass, con conseguente perdita di potenza sul
fotodiodo. Ciò non ha compromesso la verifica dei requisiti attesi sul rumore del sensore e la determinazione di una stima della sensibilità angolare del MRORO e di un limite superiore al rumore
in forze.
95
Nei seguenti grafici viene analizzato unicamente il grado di libertà corrispondente alle rotazioni intorno all’asse verticale φ.
In Figura 46 è mostrato il confronto delle densità spettrali di potenza del grado di libertà torsionale φ misurato, rispettivamente, con FMR-STC e MRORO.
E’ utile precisare che la misura differenziale FMR-STC si ottiene sottraendo i segnali ottenuti con i
due sensori capacitivi, in modo tale da cancellare il moto comune di oscillazione pendolare, sfruttare il maggiore braccio di leva e quindi ottenere una migliore sensibilità angolare.
Figura 46: Spettro dello spostamento angolare φ dei tre sensori, confrontati con il rumore termico della
fibra e quello totale del sensore MRORO.
In Figura 46 risulta evidente come, la sensibilità di MRORO nello spostamento angolare, sia migliore di tutti gli altri sensori disponibili. La linea nera rappresenta il rumore termico del pendolo,
come descritto in sezione 4.3.1 dalla relazione (9.). Il rumore del MRORO comprende sia quello
elettronico che lo shot noise, ed è ben rispettato alle alte frequenze. Al di sotto dei 10 mHz prevale
il moto residuo del pendolo.
Dalla misura di φ si può stimare la forza residua agente sulla test-mass invertendo l’equazione del
moto del pendolo riportata in sezione 4.3.1, per cui, in Figura 47 mostriamo la misura delle forze
agenti ottenuta con i sensori MRORO e FMR-STC.
96
Figura 47: Misura delle forze residue agenti sul pendolo ottenute con il MRORO (curva rosa) e con la misura differenziale FM-STC (curva azzurra).
Anche in termini di forze, il sensore MRORO, a frequenze più alte (tra 10 e 100 mHz), risulta essere
più sensibile della misura differenziale dei due sensori capacitivi, mentre a basse frequenze si è
dominati dal moto del pendolo.
La sensibilità del MRORO, comunque, risulta molto più bassa di quella attesa di oltre un fattore 2.
Il motivo di questa discrepanza è dovuto, presumibilmente, alla cattiva qualità della faccia riflettente della massa utilizzata dal MRORO in questa fase. Questa ipotesi è suffragata anche dalla misura della bassa potenza incidente sul fotodiodo che ad ottobre risultava di ¢ = 5 ∙ 10o £, mentre quella prevista è dell’ordine di 10 £. Inoltre, il fascio appariva, oltre che attenuato, anche di
dimensioni maggiori. Anche questo effetto, dovuto alla diffusione della luce riflessa, è imputabile
alla qualità della massa di test.
5.8 Ultime misure e confronti
Le ultime misure che riguardano il sensore ottico MRORO sulla facility di Trento, risalgono ad
aprile 2010, quando è stato effettuato un upgrade al pendolo di torsione in cui la test-mass difettosa è stata sostituita. Sia dalle fasi di allineamento che di calibrazione presentate nelle sezioni 5.5
97
e 5.6, si è riscontrata una qualità della test-mass migliore. La tensione somma misurata è di 1.06 V
corrispondente ad una potenza ottica incidente di ¢ = 30}£ (invece dei 5}£ precedenti), più
prossima a quella aspettata di 10 £.
Prima di sospendere il pendolo, sono state eseguite delle misure di rumore in aria, quando tutti i
sensori erano allineati sulla plancia in alluminio, su un banco nella camera pulita. Poiché il sistema
era esposto all’aria, e quindi alla presenza di gradienti termici e sismici, le misure ottenute non sono molto esplicative per quanto riguarda il limite di rumore raggiunto con la nuova test-mass. In
seguito, l’attività di misura per il sensore MRORO sul pendolo è stata rimandata per esigenze prioritarie (missione LISA PF) del lavoro di test sul sensore inerziale, in particolare per il sistema di scarica della test-mass. Quindi presentiamo solo una stima della sensibilità che potrà essere raggiunta
nelle prossime misure di rumore con il sensore MRORO.
In Figura 48 è utile riportare il confronto delle densità spettrali di potenza dello spostamento angolare φ ottenute nel run di misure di ottobre 2009, in cui era montata la vecchia test-mass, con i
limiti di rumore totale (elettronico più shot noise), calcolati con la potenza incidente sul fotodiodo
misurata ad aprile, che era maggiore, grazie alla buona qualità riflettente della massa di prova e
tenendo conto del maggior fattore di calibrazione (1.9) misurato col nuovo set-up.
Figura 48: Confronto della stima del livello di rumore totale, in spostamento angolare, che può ottenersi
con la nuova test-mass (in viola) rispetto al limite ottenuto dai dati delle misure di ottobre 2009 con la
vecchia test-mass su pendolo di torsione (in verde chiaro). La curva in nero rappresenta il rumore termico
del pendolo.
98
Rispetto al caso in cui era montata la vecchia test-mass, il limite di rumore aspettato si è abbassato
di un fattore 10, proporzionale all’aumento di potenza e di sensibilità. Con le future misure su
pendolo di torsione, si prevede di arrivare al rumore termico del pendolo al di sotto di ~4.
Le misure di fluttuazione di potenza effettuate per questo lavoro di tesi, per caratterizzare il rumore del fotodiodo a quadrante, e presentate in sezione 5.3.3, possono essere confrontate, sia con le
misure di ottobre 2009, che di aprile 2010.
Figura 49: Confronto delle densità di potenza spettrale in termini di ⁄√ëì. La curva verde chiaro indica
la potenza å misurata su banco. La curva verde scuro indica la potenza ç coincidente con la
curva gialla corrispondente alla potenza misurata a Trento in aprile 2010 di Y con la nuova testmass. La curva rossa corrispondente a su banco, corrisponde a quella blu di uguale potenza ma ottenuta sul pendolo ad ottobre 2009. In nero è indicato l’analogo del livello di rumore termico espresso in
Watt.
In Figura 49 sono presenti le densità di potenza spettrale delle tensioni somma determinate nel
run di misura di ottobre 2009 (curva blu) e nelle misure recenti effettuate su banco a Napoli,
espresse in £ ⁄√. Si vede come le fluttuazioni della potenza ottica misurate nei due run svolti a
Trento (5}£ e 30}£, rispettivamente), siano perfettamente sovrapponibili a quelle misurate con
il set-up su banco di Napoli, con le medesime potenze incidenti sul fotodiodo. Il fatto che la caratteristica del laser resti la stessa, nonostante le misure siano state svolte con configurazioni diverse
e a tempi diversi, permette di affermare che il rumore di potenza del laser è stazionario.
99
In questo modo, si può valutare l’effetto ottenuto aumentando la potenza ottica della luce incidente sul fotodiodo. Si nota, infatti, come il rumore in potenza aumenti all’aumentare della potenza ottica incidente sul fotodiodo, mentre il rumore in spostamento, visto in Figura 39 nella sezione
5.3.3, diminuisce con quest’ultima.
Si noti, inoltre, che in Figura 49 è indicato anche l’analogo del livello di rumore termico, espresso
anch’esso in termini di fluttuazioni di potenza equivalente, in modo da poterlo confrontare con gli
altri rumori. Il fatto che ogni rumore in potenza si trovi al di sotto di questo limite, permette di
concludere che il contributo del rumore di pressione di radiazione è trascurabile, alla potenza considerata, ai fini delle misure effettuate sul pendolo di torsione.
In Figura 50 sono mostrati i rumori in forza misurati con FMR-STC e MRORO confrontati con le
back-action di ottobre 2009, ottenute per diverse potenze, ricavate su banco nei laboratori di Napoli, in maniera del tutto analoga al grafico precedente. Come già visto anche in Figura 49, le curve
della back-action si trovano al di sotto del rumore termico: in blu si vede quella stimata ad ottobre,
che coincide con quella rossa corrispondente alla potenza di 5}£ stimata a Napoli; in giallo si ha
la stima della back-action ottenuta dopo la sostituzione della test-mass a Trento in aprile 2010,
corrispondente ad una potenza di 30}£, quasi coincidente con il suo analogo in verde scuro alla
potenza di 37}£, stimato in base alle misure su banco a Napoli.
Figura 50: Confronto tra i rumori in forza dei sensori FMR, STC, MRORO stimati nel run di misure di ottobre 2009, e i rumori della pressione di radiazione ottenuti dalle misure effettuate su banco con il fotodiodo di Napoli. In verde chiaro si ha la back-action corrispondente alla potenza di å, quella verde
scuro di ç, quella rossa di , mentre quella rosa chiaro di æ. åí. In nero è mostrato il rumore
termico del pendolo. In giallo quella misurata a Trento in aprile 2010 con la nuova test-mass di Y .
100
Da ciò si conclude che il sistema MRORO è idoneo per le misure sul pendolo di torsione in quanto il
rumore reintrodotto (back-action) è al di sotto del rumore termico del pendolo (equazione (9.)), e
quindi è trascurabile ai fini delle misure effettuate sul pendolo di torsione.
In Figura 51, infine, si può vedere il confronto dei limiti superiori al rumore in accelerazione ottenuti dagli strumenti presentati, rispetto a quelli di progetto per le missioni LISA e LISA PF, calcolati
con l’equazione (7.). Viene anche mostrata la curva corrispondente alle migliori misure effettuate
usando i sensori capacitivi (27) (28).
Si nota che già la misura ottenuta ad ottobre 2009 sul pendolo di torsione, nonostante la perdita di
potenza dovuta alla cattiva qualità della superficie riflettente della test-mass, alle alte frequenze
(> 20) permette di porre un limite superiore al rumore in forze molto prossimo a quello richiesto per LISA PF e migliore di tutti quelli posti precedentemente.
La curva blu rappresenta il limite in forza che potenzialmente si potrà misurare con il sensore
MRORO con la potenza ottenuta ad aprile 2010 (30}£), in analogia con quanto mostrato in Figura
48 per la sensibilità angolare. Si prevede, quindi, di poter ulteriormente migliorare le misure del
rumore in forze ottenute finora (ottobre 2009, curva verde acqua) di un ordine di grandezza, arrivando oltre il livello imposto dalle specifiche previste per LISA PF e avvicinandosi a quello richiesto
per LISA.
Figura 51: Confronto dei rumori in accelerazione dei sensori capacitivi FMR-STC (azzurro), del sensore
MRORO (magenta) e dei limiti teorici previsti per LISA (verde chiaro) e LISA PF (magenta scuro). In nero è
indicato il rumore termico del pendolo. Le linee tratteggiate verde acqua e blu rappresentano i limiti di
rumore atteso (elettronico più shot noise) ottenuti per MRORO, rispettivamente, ad ottobre 2009, con la
vecchia test-mass, e ad aprile 2010, con la nuova test-mass. La linea tratteggiata verde scuro indica la migliore stima ottenuta per i sensori capacitivi, quando il rumore del pendolo era particolarmente basso
(27) (28).
101
Conclusioni
6 CONCLUSIONI
L’attività di ricerca del presente lavoro di tesi riguarda lo studio del sensore ottico MRORO (Multiple Reflection Optical ReadOut), un dispositivo basato sul principio della leva ottica, che ha lo scopo di migliorare le performance in termini di misura angolare e in forza già raggiunta dal sensore
ottico ORO, che ne è la versione precedente. Il sensore è stato specificamente disegnato per un
pendolo di torsione a quattro masse sviluppato presso i laboratori dell’Università degli Studi di
Trento come facility per il ground testing dell’hardware di volo della missione spaziale LISAPathfinder e successivamente dell’antenna spaziale LISA.
Finora, la facility del pendolo di torsione ha permesso di testare un prototipo del Gravitational Reference Sensor, il sensore capacitivo denominato Flight Model Replica (FMR). L’analisi dei dati dei
sensori capacitivi riguarda angoli e torque, che sono le quantità rilevanti per il pendolo di torsione.
Attualmente sono in fase di analisi i disturbi relativi al FMR e il modo in cui questi provochino rumori in forza, ovvero accelerazioni della test-mass. Le campagne di test con i sensori capacitivi
hanno ottenuto una sensibilità per la forza differenziale nel range dei mHz di 200t! ⁄ ad 1
mHz e di circa 4 ∙ 10' !⁄√ a 100 mHz.
Il sensore MRORO è stato installato con successo sul pendolo di Trento; purtroppo, le misure preliminari effettuate in ottobre 2009 non hanno permesso di raggiungere la sensibilità sperata, a
causa della cattiva qualità della superficie della test-mass, che ha comportato la riduzione della
potenza incidente sul fotodiodo (con conseguente peggioramento del rapporto segnale rumore) e
la presenza di luce diffusa. Nonostante la sensibilità non fosse ottimale, si è riusciti comunque a
porre dei nuovi upper limit al rumore in forze a partire da ~ 20 mHz, arrivando a ~10' !⁄√
a 100 mHz.
In questo lavoro di tesi si è effettuata, tra l’altro, la caratterizzazione dei livelli di rumore del sensore ottico MRORO e dei suoi componenti, in particolare, sono state eseguite, su banco, misure di
rumore elettronico al variare della potenza ottica incidente sul fotodiodo a quadrante. Queste
hanno permesso di verificare che l’andamento del rumore misurato al variare della potenza segue,
a basse potenze, quello aspettato per il rumore elettronico, mentre, alle alte potenze, inizia a discostarsi in maniera significativa. Ciò è dovuto alla presenza di altre sorgenti di rumore ancora da
identificare. In ogni caso le sensibilità osservate sono sufficienti per le specifiche del sistema.
In aprile 2010, si è ripartiti con un upgrade della facility, sostituendo la test-mass difettosa ed effettuando di nuovo la procedura di allineamento e calibrazione a cui ho partecipato. Dalle prime
misure, effettuate prima che il pendolo fosse nuovamente sospeso, si stima di riuscire a migliorare
la sensibilità di almeno un ordine di grandezza e di poter raggiungere il rumore termico del pendolo al di sotto di ~4. Con questa sensibilità, dovrebbe essere possibile porre un nuovo limite
superiore al rumore in accelerazione compatibile con quello di LISA a 100 mHz ed entro un fattore
6 a 10 mHz. Purtroppo l’attività di misura del rumore in forza con il sensore MRORO sul pendolo è
stata rimandata per eseguire test più urgenti su aspetti critici per la missione LISA PF, in particolare
per il sistema di scarica della test-mass. In conclusione, si pensa che, con le prossime misure col
sensore ottico MRORO, si riescano a verificare le prestazioni del GRS con una sensibilità migliore di
quella richiesta per LISA PF sull’intera banda, dando un ulteriore contributo al ground testing di LISA PF ed, in seguito, a quello di LISA.
103
Appendice A
APPENDICE A
Stima della densità di potenza spettrale
La quantità usata per stimare la distribuzione di potenza in frequenza di un segnale - O+ P, è
detta densità di potenza spettrale (power spectral density o PSD). Questa quantità è fondamentale
nell’analisi stocastica dei dati, dove le serie temporali non portano un tipo di informazione facile
da interpretare. Invece, la PSD indica la quantità di potenza che ha il segnale ad una data frequenza, e, per un processo stazionario, ciò porta ad una funzione caratteristica della frequenza angolare ω, definita ed indipendente dal tempo.
Il rumore è una grandezza variabile nel tempo in maniera casuale, dunque non esiste una legge
oraria che lo caratterizzi esattamente. Una sua determinazione numerica -F ad un istante di tempo
t fissato deve pertanto essere descritta da una variabile aleatoria. Si tratta di una variabile a cui è
associato un insieme statistico di possibili sue determinazioni, ciascuna delle quali ha una certa
probabilità KL-F Q di verificarsi. Nel suo complesso, il rumore è descrivibile come una serie x(t) di
variabili casuali reali indicizzate dalla variabile tempo. Le diverse variabili che compongono la serie
temporale non sono, in generale, reciprocamente indipendenti, ma presentano una certa correlazione, che dipende dall’andamento temporale dei fenomeni che generano il rumore.
La grandezza che esprime in quale misura due variabili associate ad istanti diversi sono reciprocamente correlate è detta autocorrelazione, e si scrive formalmente:
1 V⁄
$ O[P = lim c - O+ P- O+ + [P+ .
V→ ~ V⁄
Questa permette di tradurre in modo appropriato nel dominio della frequenza, una serie temporale deterministica. La sua trasformata di Fourier, detta densità spettrale di potenza o potenza spettrale (single side):
¬° ONP = 2 c
U
$O[PJ "Ç [
permette di caratterizzare il rumore in termini del suo contenuto energetico alle diverse frequenze. Questa trasformata contiene tutte le informazioni presenti nella funzione di autocorrelazione,
espresse però in altro modo. Essa è la misura della quantità di variazione temporale presente nella
serie temporale che si ha a frequenza ω.
Se la serie temporale è espressa in unità X, allora il suo spettro di potenza è espresso in ¸ ⁄ .
Molti segnali interessanti in fisica, come le onde gravitazionali, hanno una PSD ben definita e localizzata in frequenza che può essere usata per separarli dal background del rumore. Purtroppo i
processi stocastici producono segnali casuali con una variabilità statistica intrinseca: l’uscita di un
esperimento rappresenta solo un campione statistico, e, anche nelle ipotesi di stazionarietà, la
PSD del processo non può essere semplicemente calcolata come una quantità deterministica, ma
deve essere stimata dai dati sperimentali.
Lo strumento usato per stimare la PSD di una serie temporale reale, discreta e di lunghezza finita,
è il periodogramma di Welch, che consiste nel valutare la trasformata di Fourier discreta ON] P
del segnale e ricavare la seguente quantità:
¬° ON] P ≈ ¢° ON] P = 2∆~ON] P∗ ON] P
Dove ∆~ è il tempo di campionamento della serie temporale discreta e l’asterisco indica il complesso coniugato.
Si deve ricordare che nel calcolare la trasformata di Fourier discreta di un segnale troncato, i dati
sono di solito pesati con una funzione “finestra” che delicatamente va a zero agli estremi del range
temporale selezionato così da evitare artefatti e deviazioni dovuti al troncamento improvviso.
Siccome le quantità a cui siamo interessati sono in generale quantità lineari (deflessioni, spostamenti, ecc.) e non quadratiche (come la potenza), lo spettro del rumore viene di solito presentato
come densità spettrale lineare o densità di ampiezza spettrale, cioè la radice quadrata della PSD.
Questa è una quantità molto usata per descrivere la sensibilità ed è espressa nelle dimensioni
¸⁄√.
Si consideri il segnale V O+P acquisito da un rivelatore per la durata complessiva T della misura. Si
può affermare che un certo fenomeno sotto indagine viene osservato se il segnale ha, in qualche
sua parte, ampiezza significativamente superiore al rumore medio atteso per quell’apparato di misura.
Il confronto si esegue tenendo conto delle proprietà statistiche del rumore, sulla base delle quali è
stabilito se esiste una probabilità non trascurabile che un eventuale incremento del segnale sia
stato generato dalla fluttuazione naturale del rumore. L’indicatore statistico con il quale è parametrizzata questa probabilità è detto rapporto segnale-rumore.
Nel caso in cui si analizzi un pezzo di durata τ del segnale acquisito, il rapporto segnale-rumore si
scrive:
¬!$ = FÈ
FÈ U V O+P+
FÈÈ
F U
- O+P+
.
Se al posto della serie temporale del segnale si utilizza la sua trasformata di Fourier ̃ V OtP, e si tiene conto soltanto della componente spettrale del segnale in una piccola banda ∆N intorno alla
frequenza N' , il rapporto segnale-rumore si scrive:
È
ÇÈ ∆Ç⁄ ̃ V ONPN
Ç U∆Ç⁄
̃ V ON' P∆N
̃ V ON' P
¬!$ ON' P = Ç U∆Ç⁄
≈ =
.
È
- ON' P∆N ý- ON' P
ÇÈ ∆Ç⁄ - ONPN
La grandezza - = ý- ON' P, detta densità spettrale lineare, è dunque un indice della sensibilità del
rivelatore, il quale è in grado di rivelare con maggiore facilità quei fenomeni il cui contenuto energetico è concentrato alle frequenze dove la potenza spettrale del rumore è più bassa.
105
Bibliografia
1. ESA-SCI(2000)11. A Cornerstone Mission for the observation of gravitational waves. 2000.
System and Technology Study Report.
2. LISA and LISA PathFinder, the endeavour to detect low frequency GWs. Araùjo, H, et al., et al. 23
Dec 2006, arXiv:gr-qc/0612152v1.
3. McNamara, Paul and Racca, Giuseppe. Introduction to LISA Pathfinder. s.l. : LISA-LPF-RP-0002,
2009.
4. Acernese, F, et al., et al. An optical readout system for the drag-free control of LISA. Class.
Quantum Grav. 22. 2005, pp. S279-S285.
5. Capozziello, Salvatore and Funaro, Maria. Introduzione alla relatività generale. s.l. : Liguori,
2005.
6. Maggiore, Michele. Gravitational waves. s.l. : Oxford University Press, 2008.
7. Carroll, Sean M. Lecture Notes on General Relativity. arXiv: gr-cq/9712019v1 . 1997.
8. Ju, L, Blair, D G and Zhao, C. Detection of gravitational waves. Rep. Prog. Phys. 63 1317–1427.
2000.
9. Sigg, Daniel. Gravitational waves. Proceedings of TASI 98. 1998, LIGO-P980007-00 - D.
10. A brief survey of LISA sources and science. Hughes, Scott A. s.l. : arXiv. gr-qc/0609028v2.
11. Ciufolini, Ignazio, et al., et al. Gravitational Wave. s.l. : IOP Publishing, 2001.
12. Soulson, Peter R. Fundamental of interferometric gravitational wave detectors. s.l. : Word
Scientific, 1994.
13. Thorne, Kip S. GRAVITATIONAL WAVES FROM COMPACT BODIES. arXiv: gr-qc/9506084v1.
1995.
14. Punturo, Michele. The VIRGO sensitivity curve, VIR-NOT-PER-1390-51. 20/10/2004.
15. V.A. Calibration and sensitivity of the Virgo detector during its second science run.
arXiv:1009.5190v2 [gr-qc]. 29 Nov 2010.
16. LISA technology—concept, status, prospects. Danzmann, Karsten and Rudiger, Albrecht. s.l. :
INSTITUTE OF PHYSICS PUBLISHING Class. Quantum Grav., 2003, Vol. 20.
17. Pollack, S. E., et al., et al. Charge Management for Gravitational Wave Observatories using UV
LEDs. arXiv:0912.1769v1. 2009.
18. H. Kogelnik, T. Li. Laser Beams and Resonators. s.l. : Proc. IEEE, Oct. 1966, Vol. 54, pp. 13121329.
19. V.A. LISA: Probing the Universe with Gravitational Wave. Version 1.0 s.l. : LISA Mission Science
Office, 2007.
20.
Generator,
LISA
sensitivity
http://www.srl.caltech.edu/~shane/sensitivity/MakeCurve.html. [Online]
Curve.
21. Unitn-Int. The LISA Technology Package on board SMART-2. Oct 2002. Rel. 1.3.
22. Time-delay Interferometry. Tinto, M and Dhurandhar, S V. 4, s.l. : Living Rev Rel, 2005 , Vol. 8.
23. Nicolodi, Daniele. Toward a third generation torsion pendulum for the femto newton level
testing of free fall in the laboratory. [Tesi di laurea specialistica]. s.l. : UNITN, AA 2006-2007.
24. Position sensors for LISA drag-free control. Weber, W.J., et al., et al. s.l. : Class. Quantum Grav.
19 (2002) 1751–1756, pp. 1751–1756.
25. Carbone, L, et al., et al. Characterization of disturbance sources for LISA: torsion pendulum
results. Class. Quantum Grav. 2005, Vol. 22, S509–S519.
26. Ciani, G, et al., et al. FMR integration procedure with UTN torsion pendulum. Università degli
Studi di trento. 2009. S2-UTN-PR-3002.
27. Ciani, Giacomo. Free-fall of LISA Test Masses: a new torsion pendulum to test translational
acceleration. February 2008. Tesi di Dottorato in Fisica.
28. Direct force measurements for testing the LISA Pathfinder gravitational reference sensor.
Cavalleri, A, et al., et al. 2009, Class. Quantum Grav., Vol. 26.
29. Cavalleri, A, et al., et al. Progress in the development of a position sensor for LISA drag-free
control. Class. Quantum Grav. 2001, Vol. 18, pp. 4133–4144.
30. Cavalleri, A, et al., et al. Ground testing, with a four mass torsion pendulum facility, of an
Optical-Read-Out for the LISA gravitational reference sensor. Journal of Physics: Conference Series
154. 2009.
31. Liccardo, Vincenzo. Sensore Ottico per il Ground Testing del Sensore Inerziale di LISAPathfinder. Tesi di laurea magistrale. Anno Accademico 2008-2009.
32. Acernese, F, et al., et al. An optical readout system for the LISA gravitational reference
sensors. Class. Quantum Grav. 2004, Vol. 21, pp. S621-S627.
33. Space-based gravitational wave detection with LISA. Shaddock, D A. 114012, 2008, Class.
Quantum Grav., Vol. 25 , p. 11.
107
34. Ostlie, Dale A. and Carroll, Breadley W. An introduction to modern stellar astrophysics. s.l. :
Addison- Wesley Publishing Company, 1996.
35. Matone, Luca. Tesi di dottorato. Etude de controle global de l'Interféromètre Cental de VIRGO.
1999.
36. La Rana, Adele. An Optical ReadOut for the Gravitatonal Reference Sensor of LISA. 2007.
Fundamental and Applied Physics Doctoral Thesis.
37. Davies, P.C.W. Alla ricerca delle onde gravitazionali. s.l. : Rusconi, Scienza e Vita nuova, 1984.
38. Torsion pendulum facility for direct force measurements of LISA GRS related disturbances.
Carbone, L., et al., et al. [ed.] S. Merkowitz and J. Livas. s.l. : AIP Conf Series 873, 2006, Proc. of the
6th Int. LISA Symposium.
39. Saulson, Peter R. PHYSICS OF GRAVITATIONAL WAVE DETECTION: RESONANT AND
INTERFEROMETRIC DETECTORS. 1998.
108
RINGRAZIAMENTI
Grazie, ai miei genitori e al loro grande sostegno nelle mie scelte, facili e difficili che siano state e
soprattutto grazie di essere il mio arco.
Grazie, a Luciano e alla sua infinita pazienza e cortesia, per avermi insegnato, a partire da zero, tutto sulla vita di laboratorio e sulla ricerca scientifica.
Grazie, al Prof. Milano per i suoi insegnamenti e la sua simpatia.
Grazie, al gruppo di Trento, in particolare Rita Dolesi, Antonella, Antonio, Daniele, Federica e Peter, che mi hanno accolto con calore nel loro laboratorio insegnandomi tanto, aiutandomi a capire
e dividendo fatica, sudate e tute nella camera pulita.
Grazie, a Fabio e Rosario per il loro sostegno quando sono particolarmente negata con
l’elettronica e con Matlab.
Grazie, alla mia sorellona e ai suoi consigli letterari e non.
Grazie, a Mauro e Anna che mi portano fuori da questo laboratorio per evitare che ne resti seppellita e ai loro consigli di moda.
Grazie, ai miei amici per esserci.
Grazie, ai cugì per le telefonate settimanali di sostegno e non.
Grazie, a Desyderi® per lo stile di vita.
Grazie, alla Musica per avermi sostenuto nelle ore di studio senza farmi cedere alla stanchezza e
alla malinconia.
Grazie, alla pasta e patate della Sig.ra Pina che mi ha nutrito in questi mesi e alla cioccolata Lindt.