Progetto LES
Sceneggiatura Movimento2 ver. nov.2000
SCENEGGIATURA
Moto rettilineo uniforme e sua rappresentazione. La velocità in funzione del tempo
Si incomincia analizzando e commentando le schede compilate nell’attività precedente ed eventuali
compiti assegnati a casa..
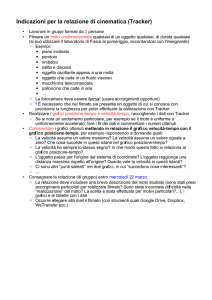
La legge oraria s(t) di un moto uniforme è una retta. Quindi per i moti rettilinei uniformi sia la
traiettoria che la legge oraria sono rette.
Position (m)
c)
Legge oraria s(t)
Traiettoria
Si riprendono gli esperimenti dell’attività precedente per associare la pendenza della retta alla velocità.
VELOCITÀ, SUO CALCOLO E SIGNIFICATO DEL SEGNO. INTERCETTA.
Oltre alla posizione nei vari istanti di tempo si può ricavare anche una informazione sulla velocità.
Come si calcola la velocità a partire dal grafico?
- si fissano due punti (1 e 2) sulla linea che rappresenta la legge oraria e se ne determinano le
coordinate (t, s)
- si calcola la differenza tra le ascisse (intervallo di tempo ∆t=t2-t1)
- si calcola la differenza tra le ordinate (spazio percorso ∆s=s(t2)-s(t1) nell'intervallo di tempo ∆t
considerato)
- si calcola il rapporto tra la differenza delle ordinate ∆s e la differenza tra le ascisse ∆t.
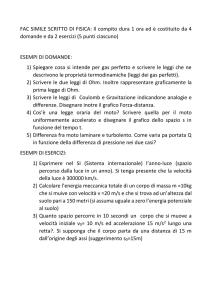
Il rapporto ∆s/∆t (che rappresenta la pendenza della retta s(t) nel caso di moto a velocità costante) si
chiama velocità media e coincide con la velocità istantanea (che è costante) nel moto uniforme.
Si fa vedere come nel caso di una retta (moto uniforme) il rapporto incrementale appena definito è
indipendente dalla scelta dell’intervallo.
s
[m]
s
[m]
5
5
4
4
3
∆s
∆
∆∆
3
∆s
∆
∆∆
2
2
1
∆t
∆
∆∆
1
∆t
∆
∆∆
1
2
3
4
5
6
7
1
t[s]
2
3
4
5
6
7
∆s s(t 2 ) − s (t1 ) 3m
=
= 1m/s
=
∆t
3s
t 2 − t1
∆s s (t 2 ) − s (t1 ) 2m
=
=
= 1m/s
∆t
t 2 − t1
2s
1
t[s]
Progetto LES
Sceneggiatura Movimento2 ver. nov.2000
Si fissa sullo schermo un moto uniforme, relativo per esempio ad un allontanamento dal sonar, e si
chiede di realizzare un moto con la stessa velocità (in modulo) ma avvicinandosi al sonar. Come si
differenziano le velocità nei due casi? Se si calcolano i valori della velocità con il metodo precedente si
trova che nel secondo caso si ottiene un valore negativo. Pertanto si può concludere che il valore
numerico della velocità dice quanto rapidamente ci si muove, mentre il segno della velocità dice se ci si
allontana o ci si avvicina al sonar (fissato come origine del sistema di riferimento).
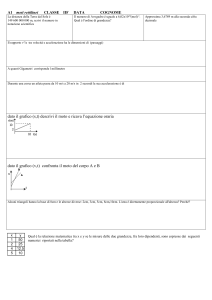
Quindi se la retta che rappresenta la legge oraria è inclinata verso l'alto la velocità è positiva e ciò
corrisponde a un moto di allontanamento dal sonar.
Position (m)
c)
Allontanandosi dal sonar
la distanza dal sonar aumenta nel tempo.
Inclinazione verso l’alto, velocità positiva.
Se la retta che rappresenta la legge oraria è inclinata verso il basso la velocità è negativa e ciò
corrisponde a un moto di avvicinamento al sonar.
Avvicinandosi al sonar
la distanza dal sonar diminuisce nel tempo.
Inclinazione verso il basso, velocità negativa.
Sempre mantenendo sullo schermo il moto uniforme di allontanamento si chiede di realizzare un moto
uniforme con la stessa velocità ma partendo da una posizione iniziale diversa.
La posizione iniziale, cioè quella assunta dal camminatore all'istante t = 0, è rappresentata sul grafico
s(t) dal valore numerico dato dall'intersezione tra la legge oraria con l'asse delle ordinate. Muovendosi
sempre con la stessa velocità costante si possono realizzare moti rettilinei uniformi con leggi orarie le
cui rappresentazioni grafiche sono quasi rette parallele che si differenziano per un diverso valore
dell'intercetta.
2
Progetto LES
Sceneggiatura Movimento2 ver. nov.2000
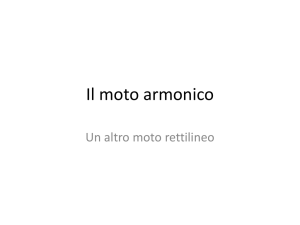
Ne risulta quindi una discussione sul significato dell'intercetta per moti uniformi come elemento
discriminante tra due moti caratterizzati da una stessa velocità e da posizioni iniziali diverse.
Position (m)
4
3
2
1
0
0
1
2
3
4
5
6
Time (seconds)
Due allontanamenti dal sonar con velocità (quasi uguali) e posizioni iniziali diverse
Le due quasi rette sono registrate in due diversi moti. Uno studente ha realizzato una retta un’altro
studente (o lo stesso studente) deve poi muoversi in modo da realizzare la retta parallela alla prima.
Questi compiti sperimentali coinvolgono l’intera classe e permettono di dare significato alle condizioni
iniziali s(0), v(0) spesso oggetto di fraintendimenti. Si pensi al caso del lancio di un oggetto e alle
difficoltà nel distinguere tra la fase di spinta (con la presenza di forze impulsive) e la fase di studio da
t=0 con s(0) e v(0) “determinate” nella fase precedente.
COSTRUZIONE DEL MODELLO LINEARE
Un moto uniforme può essere quindi descritto con una tabella oraria, un grafico e la funzione s(t) che si
riferiscono ad un modello lineare e quindi all’equazione di una retta
Nella nostra esperienza si vede che i ragazzi anche quando conoscono l’equazione della retta nella
forma y=mx+n, hanno poi difficoltà a dare significato alle variabili e ai coefficienti per il modello
matematico del moto uniforme. Insomma le associazioni y->s; x->t; m->v(0); n->s(0) non sono in
generale familiari.
Per arrivare a determinare (costruire) collettivamente il modello per la relazione posizione tempo per il
moto uniforme si può partire da un grafico di una camminata in tempo reale in cui la velocità è
approssimativamente costante e procedere come segue:
-si realizza un moto a velocità quasi costante registrando ad esempio i dati nell’intervallo (0;8s)
-si leggono sul grafico, con il cursore, ad intervalli regolari di tempo, coppie posizione- tempo,
-si costruisce una tabella parziale alla lavagna, come in figura (prime due colonne);
tempo(s)
posizione(m) posizione al mezzo metro
1,0
0
0,987
1,5
1
1,470
2
3
4
5
8
2,495
3,123
3,621
2,5
3,0
3,5
3
Progetto LES
Sceneggiatura Movimento2 ver. nov.2000
-si chiede ai ragazzi: come facciamo a sapere dai dati la posizione a 2 secondi? a 6 secondi? a 8
secondi? Avendo registrato il grafico potremo poi mettere alla prova le vostre previsioni!
-si lascia che i ragazzi abbiano il tempo per fare calcoli e ragionamenti in piccolo gruppo, coinvolgendo
tutti;
-l’insegnante può orientare ad esempio facendo arrotondare i dati della posizione al mezzo metro...per
ottenere la colonna a destra.
-dopo vari tentativi e discussioni che devono coinvolgere l’intera classe si arriva alla regola per il
particolare moto realizzato nell’esempio
s(t)
=1(m)
+
0,5(m/s) * t (s)
-e al modello (caso più generale)
s(t)
= s(0)
+
v(0)
* t;
con l’equazione che va letta correttamente sia dal punto di vista dimensionale che delle unità di misura.
-poi si passa alla rappresentazione nel piano cartesiano posizione tempo delle coppie dei punti in tabella
(i punti possono essere rappresentati con crocette/barre di errore) e si lavora perché si arrivi a
determinare con interpolazione ad occhio “la retta che meglio rappresenta i dati sperimentali”.Si discute
sulla determinazione dell’equazione della retta e si analizza il risultato che si ottiene che deve essere
coerente con la determinazione precedente.
Particolare rilievo va dato in questo caso alla costruzione del modello matematico, al significato delle
approssimazioni fatte, ai limiti del modello, all’interpolazione e all’estrapolazione.
Per sottolineare la differenza tra proporzionalità diretta e relazione lineare si mostrano tabelle dati e si
richiamano modelli noti.
Si presentano due tabelle in cui vi siano due grandezze legate nella prima da una relazione di
proporzionalità diretta, nella seconda da una relazione lineare.
TABELLA 1
Grandezza 1 Grandezza 2
0
1
2
3
4
5
6
0
2
4
6
8
10
12
G2 = 2G1
TABELLA 2
Grandezza 1 Grandezza 2
0
1
2
3
4
5
6
3
5
7
9
11
13
15
G2 = 2G1 + 3
Si imposta una discussione.Si citano alcuni esempi di proporzionalità diretta: massa-volume (M=ρV),
resistenza elettrica- lunghezza di un conduttore ( R=ρ (l/S)); ecc. Si discutono esempi sul legame tra le
4
Progetto LES
Sceneggiatura Movimento2 ver. nov.2000
due relazioni nello stesso fenomeno. Per una molla elastica la lunghezza dipende linearmente dal
carico, mentre l’allungamento è direttamente proporzionale al carico.
Analogamente per il moto uniforme la posizione s(t) è linearmente dipendente dal tempo mentre lo
spazio percorso ( il cammino) è direttamente proporzionale al tempo.
L’importanza del modello lineare dovuta al fatto che:
-il modello lineare permette di semplificare notevolmente i calcoli per l’interpolazione e
l’estrapolazione;
-i punti sperimentali possono essere interpolati con una retta (retta dei minimi quadrati) e la linearità
può essere stimata analizzando i dati sperimentali;
-qualunque funzione è associata ad uno sviluppo in serie che può essere troncato al termine lineare con
un errore che può essere valutato;
può essere discussa presentando grafici di moti con andamenti non lineari mostrando come si interpola
graficamente e giocando con variazioni di scala nella presentazione grafica.
La discussione può riguardare anche la ingannevole “apparente linearità” dovuta alle dimensioni della
finestra grafica sullo schermo.
CORRELAZIONE TRA GRAFICI s(t) E v(t).
s(t) con inclinazione verso l'alto
⇓
v(t) positiva
Position
(m)
Velocity
(m/s)
Si realizzano alcuni moti davanti al sonar e si presentano i grafici di s(t) e v(t) insieme.
Si può procedere con gradualità:
-si realizza un moto di allontanamento e si presentano i due grafici;
-si chiede di indagare sulle oscillazioni nel grafico della velocità. I ragazzi scoprono subito che il
sistema “vede” i passi. Si studia la struttura dei passi proponendo di camminare con passi lunghi, passi
corti, strisciando i piedi, saltando…. In generale i passi sono ben visibili e si presentano con una
struttura regolare nel grafico della velocità se la camminata è regolare e se l’eco è prodotto dalla pancia
(come di solito avviene). Nella figura in alto, in ogni passo, dall’inizio al centro la velocità è crescente,
5
Progetto LES
Sceneggiatura Movimento2 ver. nov.2000
dal centro alla fine la velocità è decrescente. Quindi la velocità ha valore minimo quando “si cambia
piede di appoggio”, ha valore massimo a metà. Quando si cambia piede la velocità può essere anche
nulla (ci si ferma) e ciò può essere studiato anche nel dettaglio.
-si realizza un moto di avvicinamento visualizzando il grafico della posizione e si chiede di prevedere
quello della velocità che viene presentato dopo una breve discussione
-si realizzano moti di avvicinamento-allontanamento, allontanamento-sosta-avvicinamento,
-ecc.
A seconda della pendenza di s(t) la velocità è positiva o negativa e di conseguenza v(t) sarà al di sopra o
al di sotto dell'asse dei tempi.
s(t) con inclinazione verso il basso
⇓
v(t) negativa
position
(m)
velocity
(m/s)
L’analisi dei grafici tende a mettere in evidenza che esiste un moto ideale uniforme, un modello, che è
associato al moto reale. Quali vantaggi nello schematizzare il moto come uniforme? Quali informazioni
perdiamo?
Nel caso ideale ad una retta obliqua per la posizione corrisponde una retta orizzontale (parallela a t=0)
per la velocità, se la posizione è una retta inclinata verso l’alto la retta orizzontale della velocità è al di
sopra dell’asse dei tempi, se la posizione è inclinata verso il basso la retta orizzontale della velocità è al
di sotto dell’asse dei tempi.
Occorre far notare che l'informazione sul valore della velocità è presente in entrambi i grafici anche se
in maniera diversa (pendenza in s(t), un valore medio costante in v(t)) così come l'informazione sul
segno; l'informazione relativa alla posizione di partenza, invece, non si può ricavare dal grafico di v(t).
In altre parole se si conosce il grafico di v(t) non è possibile risalire al corrispondente grafico s(t)
poiché non si hanno informazioni sufficienti: infatti per disegnare s(t) è necessario conoscere il valore
della velocità e il valore dell'intercetta (posizione iniziale) o di un altro punto, mentre dal grafico di v(t)
si ha solo il valore della velocità. Pertanto non conoscendo l'intercetta non si può disegnare s(t) a meno
6
Progetto LES
Sceneggiatura Movimento2 ver. nov.2000
di non assegnare un valore ad arbitrio per l'intercetta stessa; in tal modo si avrà il grafico di una delle
infinite s(t) (ognuna con una intercetta diversa) corrispondenti alla v(t) nota.
Quale è il significato di una eventuale intercetta nel grafico v(t)? Concludere che, per avere
un'intercetta diversa da zero nel grafico v(t), bisogna far partire il sonar quando la persona si sta già
muovendo in modo da avere un valore iniziale della velocità diverso da zero.
Quali informazioni mancano? Arrivare alla conclusione che per un solo grafico v(t) esistono più
(infiniti) grafici s(t) ognuno con un valore diverso per l'intercetta; se si vuole un grafico s(t) a partire da
un grafico v(t) bisogna scegliere ad arbitrio un valore per l'intercetta. Si può presentare una s(t) di un
moto uniforme con previsione sull'andamento del grafico v(t) e realizzare a partire da tale grafico moti
con velocità più grandi e più piccole controllando i grafici di v(t) ottenuti.
MOTI UNIFORMI A TRATTI. VELOCITA’ MEDIA E VELOCITA’ ISTANTANEA
Moti che, pur non essendo uniformi sull'intero intervallo di tempo in cui si svolgono, lo sono però su
intervalli di tempo più piccoli possono essere chiamati uniformi a tratti. Il grafico (ideale associato) di
v(t) che si ottiene non sarà una retta orizzontale in tutto l'intervallo di tempo ma lo sarà nei diversi
intervalli in cui lo dividiamo.
4
Distance (m)
3
2
1
0
0
2
4
6
8
10
12
14
16
18
20
16
18
20
Time (seconds)
Integral 1.500
=
2
Velocity (m/s)
1
0
-1
-2
0
2
4
6
8
10
12
14
Time (seconds)
Grafici distanza-tempo e velocità-tempo su cui sovrapporre grafici on-line.
7
Progetto LES
Sceneggiatura Movimento2 ver. nov.2000
Il grafico distanza tempo è stato già utilizzato nella prima attività per la riproduzione di grafici on-line.
Una funzione del software permette di calcolare l’area sottesa dalla curva velocità-tempo nell’intervallo
(6;8)s. L’area è pari a 1,5m e coincide con la differenza tra le distanze agli estremi dell’intervallo (2m0,5m=1,5m). Nel calcolo abbiamo operato con delle approssimazioni facendo riferimento al rettangolo
di base 2s equivalente al trapezio in figura.
Sulla corrispondenza puntuale (istante per istante) tra grafici di posizione e di velocità (e di
accelerazione) occorre prestare particolare attenzione: a)le scale adoperate possono non mettere bene in
evidenza aspetti del moto. Ad esempio nel grafico distanza-tempo in figura, nell’intervallo evidenziato
non risulta evidente che la velocità non passa istantaneamente da 0 a 0,75 m/s (e poi da 0,75 m/s a 0),
b)la registrazione è discreta (ad esempio con 20 valori di posizione al secondo) e la velocità deve
essere calcolata dal sistema con rapporti incrementali. A causa degli errori (numerici e “di rumore” del
sistema di acquisizione) che renderebbero di difficile interpretazione il moto, la velocità (e
l’accelerazione) sono calcolati in ciascun t con la media di diversi valori (da 3 a 15). Con la media i
picchi dei grafici (errori) sono “localmente” smussati ma si perde la corrispondenza puntuale tra le
diverse grandezze. E ciò è tanto più vero quanto maggiore è il numero di punti su cui avviene la media.
4 Tangent = 0.199
Distance (m)
3
2
1
0
0
2
4
6
8
10
12
14
16
18
20
14
16
18
20
Time (seconds)
2 Tangent = -0.844
Velocity (m/s)
1
0
-1
-2
0
2
4
6
8
10
12
Time (seconds)
8
Progetto LES
Sceneggiatura Movimento2 ver. nov.2000
Moti per la riproduzione di grafici assegnati
La prima e la seconda figura sono associate allo stesso moto. I grafici con tratto sottile sono quelli
ideali. Quelli a tratto doppio sono stati realizzati in esperimenti con studenti. Il terzo grafico è il grafico
di velocità che si è ottenuto dopo alcuni tentativi di migliorare la riproduzione. L’esperimento- gioco
può essere proposto con diverse varianti: a)lavorando con il grafico della distanza per poi visualizzare
anche quelli della velocità; b)lavorando solo con il grafico della velocità; c)lavorando visualizzando
entrambi i grafici.
E’ interessante far notare che la riproduzione del grafico della velocità (da solo): a) può risultare il più
impegnativo tra gli esercizi proposti e richiede una diversa sensibilità percettivo-motoria; b) non
richiede vincoli sulla distanza iniziale (se non quelli imposti dall’intervallo di funzionamento del
sonar). L’analisi dei grafici iniziali e di quelli che si ottengono negli esercizi di riproduzione può essere
l’occasione per introdurre o rinforzare alcuni concetti chiave che riguardano la velocità, il modo di
calcolarla e di rappresentarla, la distinzione tra velocità media e istantanea.
Grafico ideale velocità-tempo, approssimando i trapezi con rettangoli equivalenti, l’intervallo 0-20s
può essere scomposto in cinque intervalli consecutivi: (0;6) s sosta v=0; (6;8)s allontanamento con
v=0,75 m/s; (8,12)s sosta con v=0; (12;16)s allontanamento v=0,25s; (16;20)s sosta v=0.
In ciascuno degli intervalli la velocità istantanea coincide con la velocità media.
Può essere interessante far notare che la velocità media sull’intero intervallo pari a
2,50m/20,0s=0,125m/s non coincide con la media delle velocità ma con la media pesata:
v media (0,20s) =( (0 x 6s) + (0,75m/s x 2s) + (0 x 4s)+ (0,25m/s x 4s) + (0 x 4s) ) / 20s
Grafico “reale” velocità- tempo, la velocità varia in tutto l’intervallo anche se nelle soste è più facile
ottenere una velocità costante nulla. Con una scansione del grafico con il cursore grafico si ottengono in
corrispondenza di ciascun valore di t i corrispondenti valori della posizione e della velocità. Il numero
finito di punti rivelati in ciascun intervallo è determinato dalla modalità di funzionamento del sistema.
Con un campionamento (sampling) di 20 punti al secondo il più piccolo intervallo di tempo è pari a
0,05s, quindi il cursore grafico permetterà di leggere valori di posizione e di velocità a distanza
temporale fissa di 0,05s. La velocità “istantanea” letta con il cursore è in realtà una velocità media
calcolata in un intervallo di 0,05s. (sulle modalità di calcolo delle grandezze derivate si leggano le note
tecniche del sistema utilizzato). Volendo si può far vedere che la velocità istantanea ad un istante t
coincide con la pendenza della retta “tangente” al grafico della posizione (e lo stesso si può fare per
l’accelerazione con il grafico della velocità). In figura i segmenti sono tangenti alle curve di distanzatempo e velocità- tempo in t=8,4s. Le pendenze delle rette tangenti sono rispettivamente 0,12m/s
(velocità) e –0,84m/s2 (accelerazione)
9
Progetto LES
Sceneggiatura Movimento2 ver. nov.2000
P osition
(m )
V elocity
(m /s)
Posizione e velocità di un allontanamento-avvicinamento
Questo esperimento può essere realizzato con diverse varianti:
-lavorando sulla simmetria dei grafici;
-cercando di avere lo stesso modulo della velocità in allontanmento e in avvicinamento;
-invertendo le due fasi;
-riducendo il tempo di inversione (inversione istantanea).
Far notare che dovrà esserci sempre un istante (o un intervallo) in cui v=0 e l’impossibilità di avere
velocità con inclinazioni a 90° ( difficoltà nell’avere alte pendenze in v(t)). La velocità media
sull’intero intervallo è quasi nulla (esattamente nulla se si ritorna alla stessa distanza dal sonar)
Position
(m)
Oscillazioni di una persona
L’esperimento può essere realizzato “dondolandosi con regolarità” davanti al sonar.
Il gioco può essere ripetuto con diverse variazioni della: -“forma d’onda” (rettangolare, triangolare, a
dente di sega); -ampiezza di oscillazione;- frequenza.
E’ interessante far notare che è più facile riprodurre moti quasi armonici (con andamento sinusoidale)
che non le altre forme indicate che richiedono brusche (e impossibili) variazioni di velocità.
10
Progetto LES
Sceneggiatura Movimento2 ver. nov.2000
Position (m)
Moto con velocità decrescente
Il grafico spazio tempo in figura rappresenta un moto con velocità non costante. In particolare la
velocità iniziale risulta minore di quella finale come si può evincere dalla pendenza della retta tangente.
Gli studenti sono invitati a calcolare la velocità media nei 6 intervalli di 1 s, disegnando sul grafico le
rette secanti passanti per gli estremi per calcolarne le pendenze.
I risultati della velocità così ottenuti in ciascun intervallo possono poi essere confrontati con quelli che
si ottengono leggendo i dati con il cursore grafico del sistema.
Distance (m)
MOTO DI CARRELLI E GRAFICO DELL’ACCELERAZIONE
2.0
1.8
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0.0
0.6
0.9
1.2
1.5
1.8
2.1
2.4
2.7
3.0
Time (seconds)
Velocity (m/s)
0.5
0.4
0.3
0.2
0.1
0.0
0.0
0.3
0.6
0.9
1.2
1.5
1.8
2.1
2.4
2.7
3.0
Acceleration (m/s/s)
Time (seconds)
1.0
0.8
0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
0.6
0.9
1.2
1.5
1.8
2.1
2.4
2.7
3.0
Time (seconds)
Posizione, velocità e accelerazione di un carrello su una guida orizzontale
11
Progetto LES
Sceneggiatura Movimento2 ver. nov.2000
Un carrello viene lanciato in allontanamento dal sonar. Il grafico della velocità è rettilineo, questo
grafico può essere mostrato quando si decide di introdurre i grafici della velocità. L’assenza di
ondulazioni rende convincente il fatto che nei moti di persone sono i passi a produrre le tipiche
oscillazioni nel grafico della velocità. L’esperimento mette bene in evidenza il fatto che c’è una forza di
attrito che è costante (la velocità decresce linearmente nel tempo) e l’accelerazione è negativa e, nei
limiti degli errori, costante. L’accelerazione media può essere introdotta con una serie di esperimenti in
analogia con quanto è stato fatto per la velocità. La correlazione tra grafici permette di introdurre
l’accelerazione come velocità della velocità con esercizi ed esperimenti basati sull’uso corretto del
segno dei rapporti incrementali. Nell’analizzare l’esperimento proposto occorre far riflettere sul valore
numerico dell’accelerazione (relativamente basso) e sulla possibilità di modellizzare il moto come
moto a velocità costante o come moto ad accelerazione costante. Questo atteggiamento critico può
aiutare a cogliere il significato della modellizzazione.
3.0
Distance (m)
2.7
2.4
2.1
1.8
1.5
1.2
0.9
0.6
0.3
0.0
0
1
2
3
4
5
6
7
8
9
10
6
7
8
9
10
6
7
8
9
10
Time (seconds)
Velocity (m/s)
1.0
0.8
0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
0
1
2
3
4
5
Time (seconds)
Acceleration (m/s/s)
4
3
2
1
0
-1
-2
-3
-4
0
1
2
3
4
5
Time (seconds)
Grafici distanza-tempo, velocità-tempo e accelerazione-tempo. Studio dei passi
Il moto è di allontanamento e di avvicinamento. I dati della velocità e dell’accelerazione sono calcolati
a partire dai dati “primari” della distanza. Per ridurre il peso degli errori numerici i dati della velocità e
dell’accelerazione sono calcolati mediando su molti (15) dati rivelati. Con questa modalità di
elaborazione il grafico dell’accelerazione si correla bene con quello della velocità e si riesce bene a
descrivere la dinamica dei passi:
12
Progetto LES
Sceneggiatura Movimento2 ver. nov.2000
-la velocità oscilla intorno a un valore positivo quasi costante in allontanamento e intorno a un valore
quasi costante negativo in avvicinamento;
-l’accelerazione oscilla intorno allo zero sia in allontanamento che in avvicinamento;
-nell’inversione la velocità decresce quasi linearmente (anche se si evidenziano i passi come
oscillazioni intorno ad una retta che passa per lo 0) e l’accelerazione è quasi costante e negativa;
-all’inizio di ciascun passo l’accelerazione è massima (positiva) e la velocità è minima, al centro del
passo l’accelerazione è nulla e la velocità è massima, alla fine l’accelerazione è minima (negativa) e la
velocità ritorna quasi al valore iniziale.
LA CURVA VELOCITA’-DISTANZA
2.0
Distance (m)
1.8
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0.0
0.60
1.54
2.48
3.42
4.36
5.30
6.24
7.18
8.12
9.06
10.00
Time (seconds)
Velocity (m/s)
1.0
0.8
0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
0
1
2
3
4
5
6
7
8
9
10
1.2
1.4
1.6
1.8
2.0
Time (seconds)
1.0
Velocity (m/s)
0.8
0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
0.0
0.2
0.4
0.6
0.8
1.0
Distance (m)
Distanza-tempo, velocità-tempo, velocità-distanza del moto di un ragazzo.
Il moto è schematicamente descritto nelle fasi: allontanamento, avvicinamento, allontanamento,
avvicinamento, sosta. La corrispondenza velocità-distanza non è una funzione (allo stesso valore della
distanza possono corrispondere più valori della velocità). La curva velocità-distanza è descritta in senso
orario. Lo studio del moto con i grafici on-line di velocità-distanza oltre a risultare un utile esercizio
per cogliere le regole di costruzione di grafici correlati possono aiutare ad impadronirsi di strumenti che
risulteranno poi utili nella descrizione di diversi fenomeni scientifici.
SITI CONSIGLIATI http://www.glenbrook.k12.il.us/gbssci/phys/Class/1DKin/1DKinTOC.html
13