I sensori di spostamento induttivi
•Si basano sulla variazione del coefficiente di
auto o mutua induzione con lo spostamento
incognito.
•Sono dispositivi molto diffusi poiché
presentano una elevata robustezza verso i
fattori
ambientali
(si
ricorda
l’effetto
dell’umidità nei sensori capacitivi).
1
I sensori a variazione di riluttanza e/o
induttanza
Nota teorica:
Consideriamo il seguente circuito magnetico:
h1
N
i
h2
La relazione tra forza magnetomotrice, flusso e riluttanza è la
seguente:
fmm = Ni = flusso x riluttanza= Φ x R [A-spire]
Ni
Φ=
R
[Weber]
2
I sensori a variazione di riluttanza e/o
induttanza
h1
N
i
L’induttanza è legata
alla variazione del flusso
indotto φ e al numero di
spire N, secondo la
relazione:
h2
dφ
L=N
di
N2
L=
R
La Riluttanza R è funzione dei parametri
geometrici e magnetici dei materiali
utilizzati:
l
R=
µ 0µ r A
l:
A:
lunghezza del cammino percorso dal flusso
area della sezione trasversale del “tubo di flusso”
µ0 : permeabilità relativa dello “spazio libero”
µ0 = 4π x 10-7 Hm-1
µr : permeabilità relativa del materiale
3
I sensori a variazione di riluttanza e/o
induttanza
•In linea di principio, ogni variazione in N, µ, o
nella geometria può essere usata per una
trasduzione “induttiva”
•I sensori più usati adottano, comunque, la
variazione di l0 (cammino delle linee di campo
nel traferro) oppure di µ ottenendo una
variazione di L
•Questi sensori devono essere schermati per
evitare l’influenza di campi magnetici esterni,
ma non sono influenzati dall’umidità (al
contrario dei sensori capacitivi)
µ
4
I sensori a variazione di riluttanza
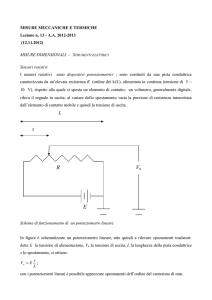
Un esempio di sensore per la misura di spostamento è
rappresentato nella schematizzazione seguente:
d
air gap
h1
N
i
h’2
h’’2
h2=h’2+h’’2
Se si impone uno spostamento d alla parte mobile del “core”
si ottiene una variazione di L.
1 l0
1 l
2h1
2h2
2d
+∑
=
+
+
R=∑
µ A0
µ0 A µrµ0 A µrµ0 A µ0 A
Il termine Rv=lv/µ0Av , relativo al flusso disperso, è trascurabile
ipotizzando Av>>lv
5
I sensori a variazione di riluttanza
d
air gap
h1
N
i
h’’2
Si ricava allora per la riluttanza
R = R 0 + kd
2h1 + 2h2
R0 =
,
µ r µ0 A
ed infine per l’induttanza ... ...
2
2
N
N
L=
=
R
R0 + k d
2
k=
µ0 A
L=
L0
(1 + x )
N2
L0 =
,
R0
Comportamento non lineare con d !!
kd
x=
R0
6
I sensori a variazione di riluttanza
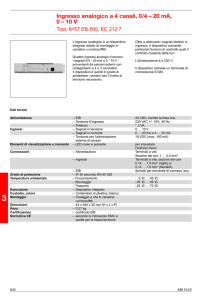
Sensore differenziale a riluttanza variabile
7
I sensori ad accoppiamento variabile
Linear Variable Transducer
Il movimento del core produce una
variazione
dell’induttanza
che
viene
misurata mediante opportuni circuiti di
condizionamento (ponti).
8
I sensori di spostamento induttivi
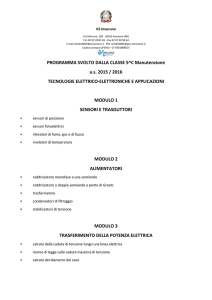
I trasformatori differenziali: Linear
Variable Differential Transformers (LVDT)
I trasformatori differenziali (LVDT) sono
costituiti da un avvolgimento primario e
due avvolgimenti secondari.
Direzione di
spostamento del
nucleo
ferromagnetico
Il funzionamento è basato sulla variazione
della mutua induttanza, in funzione della
posizione del nucleo ferromagnetico!!!
9
I sensori di spostamento induttivi
LVDT
Il grado di accoppiamento magnetico tra il
primario e ciascuno dei secondari è funzione
della posizione del nucleo.
Collegando i secondari in opposizione di fase (modalità
differenziale) è possibile determinare una “posizione di
zero” per il nucleo.
10
I sensori di spostamento induttivi
LVDT
11
I sensori di spostamento induttivi
LVDT
eex
eex
eo
1
x
eo1
eo2
i
eo
2
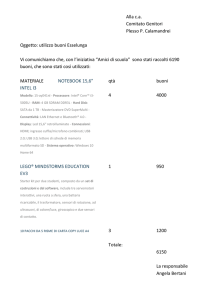
•Il primario è eccitato con una tensione di
tipo
sinusoidale
(Vmax=[3,15]V),
con
frequenza variabile tra 60 e 20.000 Hz
(Vedremo che tale frequenza limita la
massima frequenza del segnale in ingresso).
• Sui secondari vengono indotte due tensioni
isofrequenziali con la tensione che eccita il
primario e di ampiezza variabile con la
posizione del nucleo.
12
I sensori di spostamento induttivi
LVDT
Ampiezza del segnale
d’uscita fotografato in
corrispondenza di un
determinato stato
dell’ingresso (ad
esempio quando
l’ingresso è max)
L’ampiezza del segnale d’uscita diventa
una funzione della posizione del nucleo!
13
I sensori di spostamento induttivi
LVDT
Modellizzazione analitica,tenendo conto della corrente al
secondario:
M1
Ls/2
Rs/2
is
ip
eex
M3
Rp
eo
Rm
es1
Rs/2
Lp
Ls/2
M2
es2
eex = i p ( R p + sL p ) + is ( sM 2 − sM 1 )
eo = Rmis
Rs
Ls
Rs
Ls
0 = + Rm + is + s + s − sM 3 is + ( sM 2 − sM 1 ) i p
2
2
2
2
0 = ( Rs + Rm ) is + s ( Ls − M 3 ) is + s ( M 2 − M 1 ) i p
14
I sensori di spostamento induttivi
LVDT
M1
Ls/2
Rs/2
is
ip
eex
M3
Rp
eo
es1
Rm
Rs/2
Lp
Ls/2
M2
es2
Supponendo che Ls-M3 non vari
con la posizione del nucleo
ferromagnetico, poniamo:
L2=Ls-M3
s ( M 2 − M 1 ) Rm
eo
=
eex s 2 ( M 2 − M 1 )2 − L2 Lp − s ( L2 R p + Lp Rs + Lp Rm ) − R p ( Rs + Rm )
Supponendo L2 L p >> ( M 2 − M 1 )
2
s ( M 2 − M 1 ) Rm
eo
= 2
eex -s L2 L p − s ( L2 R p + L p Rs + L p Rm ) − R p ( Rs + Rm )
15
I sensori di spostamento induttivi
LVDT
s ( M 2 − M 1 ) Rm
eo
= 2
eex - s L2 L p − s ( L2 R p + L p Rs + L p Rm ) − R p ( Rs + Rm )
Considerazioni:
Se Rm → ∞ ⇒
e0 s ( M 1 − M 2 )
=
eex
sL p + R p
quindi e0 è
proporzionale a M1-M2
Se M1-M2=kx si ha:
eo=eexk’x
Per valori finiti di Rm
Poichè la fase assume valori compresi tra +90° e -90°, si
deduce che deve esistere un valore per la frequenza di
eccitazione per cui lo sfasamento tra ingresso ed uscita
è nullo:
1
1 R p ( Rs + Rm ) 2
fc =
2π
L2 L p
In questo caso:
e0
Rm ( M 1 − M 2 )
=
eex ( Rs + Rm )L p + R p L2
Se M1-M2=kx si ha:
eo=eexk’’x
e si può dimostrare che siamo in condiioni di massima sensibilità!
16
I sensori di spostamento induttivi
LVDT
•Ricordando che il primario è eccitato con una
tensione di tipo sinusoidale, appare evidente che:
l’uscita del sensore è una sinusoide modulata in
ampiezza.
•Per ricavare l’informazione in uscita
si può: utilizzare un voltmetro per AC e
perdere l’informazione sul verso e sulla
posizione assoluta:
17
I sensori di spostamento induttivi
LVDT
Ricordando che il primario è eccitato con una
tensione di tipo sinusoidale, appare evidente che:
l’uscita del sensore è una sinusoide modulata
in ampiezza.
Dal modulo di eo NON è possibile risalire al
verso dello spostamento o alla posizione.
|e0|
18
I sensori di spostamento induttivi
•…….oppure
LVDT
demodulare il segnale e utilizzare un
voltmetro in DC, o un oscilloscopio
(insieme ad eventuali filtri passabasso).
Il valore medio di e0 contiene informazioni sulla
posizione assoluta (below null o above null).
19
I sensori di spostamento induttivi
LVDT
•Una volta generato un segnale che ha lo stesso
andamento della forzante xi è necessario filtrare.
•Se la frequenza della portante è grande rispetto alla
massima frequenza del segnale (valore tipico è il
rapporto 10:1) possono bastare dei filtri RC, semplici
o multipli.
20
I sensori di spostamento induttivi
LVDT
Si supponga di voler misurare uno
spostamento il cui contenuto in frequenza
risulta trascurabile a frequenze superiori a
1000 Hz, utilizzando un LVDT con tensione
di eccitazione a frequenza di 10.000 Hz. Il
processo di modulazione e successiva
demodulazione produrrà dei segnali a
frequenze
nell’intervallo
[19.000
Hz,
21.000Hz].
Si vuole che il ripple residuo alla frequenza
di 19.000 Hz sia minore del 5%. Deve allora
essere:
0.05 =
1
[19000 ⋅ 6.28 ⋅ τ ] + 1
2
τ f = 0,00017 s
f
21
I sensori di spostamento induttivi
LVDT
Alla frequenza di 1000 Hz tale filtro produce
un’attenuazione pari a 0,68 e uno
sfasamento pari a -47°. Si ha quindi una
distorsione eccessiva del segnale.
Si possono migliorare le prestazioni del filtro
utilizzando una cella RC doppia:
1
0.05 =
2
[19000 ⋅ 6.28 ⋅ τ f ] + 1
τ f = 0,000037 s
In questo caso alla frequenza di 1000 Hz si
ha un’attenuazione di 0,94 e uno
sfasamento di -26°. In tali condizioni si
ottiene in uscita un segnale che è una copia
fedele e ritardata del segnale in ingresso (cfr
condizioni di non distorsione):
ϕ ⋅ ( π / 180 )
26
tr =
=
= 72 µs
2πf
180 ⋅ 2 ⋅ 1000
22
I sensori di spostamento induttivi
LVDT
I trasformatori differenziali presentano un numero
elevato di vantaggi:
•Risoluzione infinitesima;
•Assenza di frizione meccanica;
•Vita media teoricamente infinita (alcumi
modelli dichiarano un MTBF =2x106 h=228 anni);
•Isolamento elettrico tra primario e secondario;
•Alta linearità e sensibilità;
•Buona risposta dinamica.
Intervallo di misura
±100µm;
±25cm.
Tensione di
alimentazione
1V, 24V;
50Hz, 20kHz.
Sensibilità (per volt
di alimentazione)
0.1V/cm;
40V/ µm.
Risoluzione
Fino a 0.1 µm
23
I sensori di spostamento induttivi
LVDT
24
I sensori di spostamento induttivi
LVDT
25
I sensori di spostamento induttivi
Inductosin
•L’ampiezza dellla tensione indotta dal primario sul
secondario (parte mobile) dipende dalla posizione relativa
dei due avvolgimenti.
•Con riferimento alla figura:
-la posizione attuale induce una tensione massima
positiva sul secondario (parte mobile);
-uno slittamento pari a s comporta una tensione
massima negativa sul secondario;
-uno slittamento pari a s/2 e 3/2s comporta una tensione
minima (nulla) sul secondario;
-uno slittamento pari a 2s comporta nuovamente una
tensione massima positiva sul secondario.
•Un secondo avvolgimento sul secondario traslato di s/2 consente
di stiamare anche il verso di percorrenza.
26
I sensori di spostamento induttivi
Potenziometro ad induzione
M = N2
dφ
di1
Ni
φ = B • S = BS cos ϑ = µ 1 1 S cos ϑ
l
N
M = N 2µ 1 S cos ϑ = K' cos ϑ
l
di
e0 = M 1 = KI1 sin( ωex t ) cos ϑ
dt
Vantaggi:
•Bassi effetti di carico
•Bassa dipendenza dalle
grandezze ambientali
•Isolamento elettriico tra
primario e secondario
La tensione indotta sul secondario dipende dall’angolo ϑ.
27
I sensori di spostamento induttivi
Sincro
•I Sincro sono dei sistemi che
implementano un servomeccanismo in
grado di trasferire un movimento da un
primario ad un secondario (transformer).
28
I sensori di spostamento induttivi
Sincro
Note:
•Sul rotore, che svolge il ruolo di primario, si forza una
corrente sinusoidale;
•Sugli avvolgimenti dello statore verranno indotte delle
f.e.m. le cui ampiezze dipendeno dalla posizione del
rotore.
29
I sensori di spostamento induttivi
Sincro
•Tale terna di tensioni applicata al “transformer”
definisce una forza magnetomotrice allineata a quella
del rotore del “transmitter”.
•Il rotore del transformer agisce come un “search
coil” della direzione del campo generato dallo statore:
• Se il rotore si trova allineato a tale campo su
esso viene indotta la massima f.e.m..
•Al contrario se il rotore è perpendicolare al
campo allora viene indotta una f.e.m. nulla.
•La f.e.m. indotta sul rotore viene usata per azionare
un servomeccanismo che agisce sul carico e al
contempo riporta il rotore nella posizione di equilibrio
(f.e.m. nulla)
30
I sensori di spostamento
Eddy current noncontacting
transducers
•I sensori a correnti parassite, sfruttano il fenomeno
dell’induzione di correnti parassite su un opportuno
target, che a loro volta cambiano l’impedenza
dell’”active core” e quindi provocano uno
sbilanciamento del ponte.
•Il “balance coil” serve per compensare gli eventuali
effetti termici.
•Intervallo di misura: 0.25, 30 mm;
•Non linearità migliore di 0.5%;
•Frequenza di eccitazione 1MHz;
•Risoluzione 0.0001 mm.
31