Misure di Moto Relativo
Sistemi laser (già visti)
Potenziometri (già visti)
Encoders ottici e magnetici (già visti)
Trasformatore differenziale (LVDT, RVDT)
Trasduttori capacitivi
Sensori presenza oggetti
Sensori capacitivi e induttivi
Sensori fotoelettrici
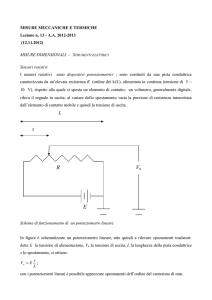
Il trasformatore differenziale
Linear Variable Differential Transformer (LVDT)
E’ utilizzato per misure di spostamento lineari e di rotazione.
Alimentazione:
tensione sinusoidale
Ampiezza: 3 -15 V
frequenza: 60 - 20000 Hz
Ingresso
Uscita
Tipologie costruttive di trasformatori differenziali
Alimentazione
Camma ferrosa
Lineare per limitate
rotazioni
-40°< θ < 40°
Negli LVDT il segnale all’uscita è presente solo se il
trasduttore è alimentato (quindi è un trasduttore passivo)
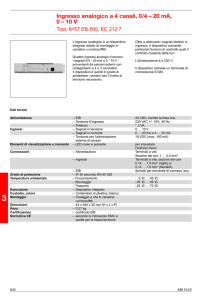
Principio di funzionamento
I due avvolgimenti secondari identici sono sede di tensioni
sinusoidali indotte alla stessa frequenza dell’alimentazione,
l’ampiezza varia pero’ a seconda della posizione del nucleo
ferromagnetico
Se il nucleo è posto
in posizione centrale
e i due secondari
sono fra loro non
collegati, l'ampiezza
della tensione indotta
nei due secondari è
uguale
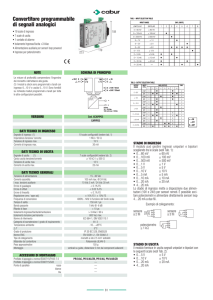
Tipologie di collegamento del secondario
Collegando opportunamente i due avvolgimenti secondari in controserie
si ottiene una posizione di zero ( xi=0) nella quale l’uscita globale di
tensione è praticamente nulla
Secondari collegati in opposizione (controserie)
Se i due secondari
vengono collegati in
opposizione, è
riportato l’andamento
della ampiezza della
tensione d’uscita per
diverse posizioni del
nucleo
L'uscita di un LVDT è quindi generalmente un segnale sinusoidale con
frequenza compresa fra 60 e 20000 Hz, che solitamente viene filtrata
per permettere la comprensione del modulo dello spostamento mediante
semplici sistemi di acquisizione di livelli analogici (altrimenti sarebbe
necessario un oscilloscopio)
Uscita LVDT
prima del filtraggio
Uscita LVDT dopo
il filtraggio
Il filtraggio si può realizzare per mezzo di reti elettriche
costituite da resistenze e capacità opportunamente collegate.
C'e' ottima linearità, la fase “salta” passando per lo zero.....
L’ampiezza del segnale di uscita
è proporzionale allo spostamento
del nucleo, ma nel passaggio per
lo zero si ha uno sfasamento di
180° del segnale
Ampiezza:
trasduzione del
modulo dello
spostamento
Fase: informazione
sulla direzione
dello spostamento
Elaborazione segnale uscita LVDT
Per poter ricostruire correttamente il segnale d’ingresso è quindi
necessario considerare anche l’informazione della fase oltre che
dell’ampiezza della tensione d’uscita.
Senza la demodulazione sensibile alla
fase due segnali di ingresso di forma
diversa appaiono all’uscita come uguali
E’ possibile ottenere una caratteristica pressoché lineare dell’uscita con
l’ingresso per un ampio campo di spostamenti dallo zero
Guardanto il
data sheet di un
LVDT che
potete
comprare da un
costruttore
Errore di zero
sull'ampiezza
Errore di zero
sulla fase
Generalmente la fase non assume i due valori: 0° e 180° ma esiste uno
sfasamento di “partenza”fra segnale di alimentazione e uscita
S0 vettore rappresentativo tensione al secondario
per nucleo in posizione centrale
Eal
S1 vettore rappresentativo tensione al secondario
per nucleo in posizione superiore
S2 vettore rappresentativo tensione al secondario
per nucleo in posizione inferiore
Si può vedere che generalmente si ha uno sfasamento anche fra la tensione di
alimentazione e la tensione S0 nella posizione centrale
come già detto lo sfasamento presenta una variazione di 180° in corrispondenza
del passaggio del nucleo per la posizione centrale del LVDT
Esiste però una frequenza di alimentazione per cui questo
sfasamento dello zero è nullo
Esempio di sfasamento
tra tensione in ingresso
ed in uscita al variare
della frequenza di
alimentazione
La frequenza di alimentazione per la quale lo sfasamento è nullo
è fornita dal costruttore
Qualora non si possa utilizzare una frequenza di
alimentazione che riduce lo sfasamaneto si possono usare
reti elettriche per la compensazione dello sfasamento fra
tensione di alimentazione e di uscita
Reti per la
compensazione
dell’anticipo di
fase
Reti per la
compensazione
del ritardo di fase
Influenza del carico sulla sensibilità
Si può vedere che per un determinato voltaggio di alimentazione con
frequenza f, l'ampiezza del voltaggio di uscita dipende dal valore della
resistenza dell'utilizzatore e dalla frequenza.
Influenza del carico sulla sensibilità
40
Si può notare che se la resistenza
dell'utilizzatore è piccola può
essere utile inserire alcuni stadi di
amplificazione del segnale.
0H
z
L’impedenza del carico genera
insieme della frequenza di
alimentazione una influenza sulla
sensibilità del LVDT.
0
40
Hz
z
0H
0
25 Hz
0
250
Parlando di errori di inserzione.... influenza della massa del nucleo e
dell'asta sulla misura di spostamento di un corpo di massa m
Indicata con m la massa di un corpo che si muova con legge
sinusoidale, è necessario valutare l’effetto dell’inserzione delle masse
interne del sensore nella catena di misura.
m = 0.1 g
Si=Si0sin(ωit) cui corrisponde una accelerazione ai=-Si0 ωi2sin(ωit)
Massa nucleo e asta rigida
mn+a=4g
Nell’ipotesi che l’ampiezza del moto della massa m sia S i=0.1 mm e fi=1000 Hz si
ha
ωi=2π1000=6283 rad/s
l’ampiezza della forza agente sulla massa (senza LVDT) è:
Fm=0.1e-3⋅0.1e-3 ⋅62832=0.395 N
Se si collega l'LVDT al sistema, la forza sul nucleo, nell’ipotesi che il sistema
riesca a mantenere le stesse caratteristiche del moto, risulta:
Fnucleo= 4e-3⋅0.1e-3 ⋅62832=15.8 N
Si ha quindi che per l'inserimento del misuratore il sistema che forinisce lo
spostamento alla massa m deve applicare una forzante sinusoidale molto più
grande (16.2 N invece di 0.4 N) per garantire lo stesso moto.
Qualora ne sia sempre capace non c'e' errore di inserzione
Qualora non ne sia capace questo andrà a limitare il valore dell'ampiezza
dello spostamento e si avrà un errore di inserzione nella misura dello
spostamento
Caratteristiche metrologiche LVDT commercialmente disponibili
Corsa
da ±0.125 mm a circa ±100 mm
Non linearità
0.5% è possibile giungere sino allo 0.1%
Sensibilità
con alimentazione 3÷6 V si ha 0.02 ÷1 V/mm a seconda
frequenza tensione alimentazione e della corsa
Risoluzione
nominalmente infinita, non vi è contatto fra le parti mobili,
l’attrito può essere considerato nullo, vi sono forze
magnetiche radiali e longitudinali (sull’ordine dei 10÷30
mN)
Masse mobili
da 0.1g a 5 g
Sensibilità a spostamenti radiali o trasversali
<1% sensibilità longitudinale
Banda passante 0÷2000 Hz (max frequenza per alimentazione 20000 Hz)
Caratteristiche metrologiche trasformatori differenziali rotazionali
(Rotational Variable Differential Transformer (RVDT))
Corsa
fino a ±60 °
Non linearità
±1% per corse di ±40°, ±3% per corse di ±60°
Sensibilità
10 ÷20 mV/grado a seconda frequenza tensione
alimentazione e della corsa
Risoluzione
nominalmente infinita, non vi è contatto fra le parti mobili,
l’attrito può essere considerato nullo, vi sono forze
magnetiche radiali e longitudinali (sull’ordine dei 10÷30
mN)
Banda passante 0÷2000 Hz (max frequenza per alimentazione 20000 Hz)
Altri sensori a variazione di induttanza
Circuito secondario
Circuito primario
In conseguenza alla rotazione del nucleo centrale si ha una variazione di riluttanza con una
proporzionale variazione dell’induttanza di ciascun avvolgimento e di conseguenza una
variazione della tensione di uscita. Considerando lo sfasamento fra tensione di uscita e di
ingresso è possibile individuare il verso di rotazione del nucleo centrale.
Sullo stesso principio di funzionamento si possono realizzare misure di spostamenti
longitudinali o realizzare degli accelerometri
Caratteristiche metrologiche
Trasduttori lineari a variazione di induttanza
Corsa
da 1 mm a 2000 mm
Non linearità
1% fs fino allo 0,02% fs per i modelli più accurati
Sensibilità
0.2 V/mm fino a 2V/mm
Risoluzione
nominalmente infinita, non vi è contatto fra le parti mobili,
l’attrito può essere considerato nullo, vi sono forze
magnetiche radiali e longitudinali di modesta entità
Trasduttori di spostamento angolari
Campo misura
±45°
Non linearità
0.5÷1% del fs
Sensibilità
0.1 V/grado
I sistemi senza contatto non provocano in generale errore di inserzione
nella misura, in quanto non interferiscono non moto dell'oggetto!
Sia in misure statiche...
spostamento,
dilatazione
centraggio,
posizionamento
corsa di pistoni
Che in misure dinamiche...
vibrazioni di alberi,
eccentricità
vibrazione di organi
di macchine
vibrazioni assiali,
usura e deformazione
pale rotori
O nel controllo in posizione di attuatori di macchine di prova
trasduttore di spostamento
M
controllo azione
Trasduttori di spostamento di tipo capacitivo
Alcuni richiami sui condensatori...
Un semplice condensatore con due armature di area A poste a
distanza d ha una capacità C
C =
A
A
=0 r
d
d
Se si applica alle armature una differenza di potenziale E si genera nel
mezzo dielettrico un campo elettrico di intensità K
E
d
Il campo K “carica” le armature di una quantità di carica Q
K=
Q=C E
Tra le armature si genera una forza che tende ad attrarle pari a
1 A 2
F= 2 E
2 d
Condensatori variabili
La variazione di uno dei tre coefficienti (A,d, ε) implica quindi una
variazione della capacità del condensatore
x
b
Variazione di area A
Si consideri ad esempio di variare l'area delle armature di condensatori con
superfici rettangolari o circolari
C x=
bx
=K1 x
d
2
2
R −r
C =
=K 2
d
sensibilità=
dC
b
= = K 1
dx
d
2
2
dC
R −r
sensibilità= =
=K 2
d
d
Si hanno quindi caratteristiche in prima approssimazione lineari
Variazione di distanza d
Si consideri ad esempio di variare la distanza delle armature di
un condensatore con superfici rettangolari
A
C x=
x
dC
A
C
sensibilità=
=− 2 =−
dx
x
x
Si ha quindi una caratteristica in prima approssimazione iperbolica
Quindi la sensibiltà non è costante e aumenta al diminuire della distanza x;
c'e' però un limite fisico a questa distanza determinato dalla rigidità dielettrica
del mezzo interposto fra le armature; sottouna certa distanza si generano
scariche fra le armature.
Dalla formula precedente si ha anche:
dC
dx
=−
C
x
Quindi le variazioni relative di capacità e spostamento uguali
x
Si ha quindi una caratteristica approssimabile con quella linere solo per
piccoli intervalli di variazione della misura..
x
Variazione della costante dielettrica
ε0
ε
L
Si consideri ad esempio di variare la costante dielettrica tra le le armature di
un condensatore con superfici rettangolari ( di lato L=L1+L2 e b)
L1 b
L2 b
b
C =o
o r
=o L1r L 2
d
d
d
C x= o
L− xb
xb
b
b
b
o r
= o L− x r x=o L o −x r x
d
d
d
d
d
b
C x=C 0 o x −1 r
d
dC
b
sensibilità=
=o −1 r
dx
d
Si ha quindi una caratteristica in prima approssimazione lineare
Trasduttore capacitivo a singola armatura
E' uno dei trasduttori più utilizzati e si basa sulla variazione della capacità del
condensatore con la variazione della distanza fra le armature.
Il nome deriva dal fatto che generalmente la seconda armatura del condensatore è
costituita da una delle superficie dell'oggetto da misurare, utilizzandola come
elettrodo a terra.
Qualora la superficie scelta non sia metallica ma di materiale isolante essa è resa
conduttrice usando vernice metallica o spalmandola di grafite e mettendola
seguentemente a terra.
I condensatori variabili “reali”
I casi visti in precedenza si riferiscono a condensatori “ideali”,nel considerare il
comportamento reale quindi bisogna tenere conto di due fattori principali che
determinano lo scostamento della caratteristica di taratura da quella nominale
( causando ad esempio scostamento dalla linearità per i condensatori lineari)
Effetto di bordo del campo elettrico
Circuito elettrico di misura associato al trasduttore ( chi è interessato li
legga sul libro)
L'effetto di bordo viene solitamente ridotto mediante l'utilizzo di una piastra
metallica che contorna l'armatura del trasduttore e posta al suo stesso
potenziale elettrico.
Caratteristiche di taratura di trasduttori di spostamento capacitivi
Temperatura di utilizzo:
sono disponibili isolanti in allumina che permettono un funzionamento efficace fino a
1000°C
Campo di misura:
possono essere utilizzati per campi di misura estremamente piccoli , dell'ordine delle
dimensioni molecolari sia per distanze elevate ( 30 km) come negli altimetri degli
aereoplani (sensori assoluti di pressione ad es. BAROCAP) . Generalmente per
misure di distanze micrometriche e distanze elevate gli strumenti più accurati sono
quelli a variazione di distanza, mentre per misure fra 1 e 10 cm sono più accurati
quelli a variazione di area.
Sensori presenza oggetti
Sensori capacitivi e induttivi
Sensori fotoelettrici
Spesso vengono chiamati anche sensori di prossimita':
I sensori di prossimità si prestano a numerose funzioni di controllo ed in
particolare possono operare anche in condizioni troppo severe per
qualsiasi tipo di interruttore meccanico.Le applicazioni più frequenti sono:
• Fine corsa senza contatto
• Rilevazione presenza pezzi in lavorazione
• Rilevatori di sequenza
• Rilevazione velocità di rotazione o scorrimento
• Funzione encoder incrementale
Sensori induttivi
Un campo elettromagnetico oscillante viene generato nell’area sensibile.
Quando un oggetto metallico entra nel campo di sensibilità, tende a ridurre
l'ampiezza dell’oscillazione, dando luogo ad una commutazione nello stadio di
uscita.
Nella gamma dei sensori induttivi sono presenti versioni con uscita lineare in
corrente o in tensione.
In questo caso la presenza di oggetti metallici viene rilevata e trasformata in
un segnale proporzionale allo smorzamento dell’oscillatore, che dipende dalla
distanza e dalla composizione metallica dell’oggetto rilevato.
Il sensore puo' essere scelto a contatto normalmente aperto ( N.O.) o normalmente chiuso (N.C.) quindi fornire
segnale nel caso l'oggetto sia (N.O.) o non sia (N.C.) nel range di lavoro del sensore
Quando il contatto è chiuso il sensore fornisce una uscita: Un'uscita NPN, quando è attiva, ha una tensione di 0V (il
negativo dell'alimentazione dell'apparecchiatura), mentre quella PNP ha una tensione +V (il positivo
dell'alimentazione)
Sensori fotoelettrici
Le fotocellule, o sensori fotoelettrici sono impiegati nei più svariati settori dell'automazione
industriale per la rivelazione e conteggio di oggetti, lettura di contrasti, misure, rilevano la
presenza di materiali non conduttori come il legno, la plastica, il vetro, ecc. e di metalli
ferrosi e non ferrosi. In generale un sensore fotoelettrico, consiste di una sorgente luminosa.
o emettitore, un ricevitore, un amplificatore/demodulatore e uno stadio di uscita. Quando il
fascio luminoso generato dai fotoelementi viene interrotto, lo stadio di uscita della
fotocellula cambia il proprio stato logico
I tipi di sensori più usati sono i seguenti
Proiettore/ricevitore
●Sbarramento a riflessione
●Sbarramento a riflessione polarizzato
●Tasteggio o reflex
●
Sensori fotoelettrici: proiettore ricevitore (through beam)
In queste fotocellule, il proiettore e il ricevitore
costituiscono due dispositvi separati, tipicamente
montati l'uno di fronte all'altro. Ogni oggetto interposto
tra i due dispositivi interrompe il raggio di luce e viene
rilevato. E' utilizzato per applicazioni con distanze di
lavoro elevate o in ambienti “sporchi”.
Si trova spesso nella configurazione a forcella
Sensori fotoelettrici: Sbarramento a riflessione (retro reflective)
Questi tipi di fotocellule sono dispositivi nei quali i fotoelementi di emissione e ricezione sono
contenuti nello stesso corpo meccanico. Il fascio di luce emesso è riflesso da un riflettore prismatico
(catarifrangente) che lo ritorna al ricevitore. Quando un oggetto attraversa il percorso del raggio di
luce, esso viene rilevato. Questo tipo di sensore è molto diffuso, in quanto a buone distanze
operative aggiungono semplicità di allineamento sensore/riflettore e facilità d'installazione anche in
spazi ristretti. Ha problemi nel riconoscere oggetti brillanti che si possano “confondere” con il
riflettore
Sensori fotoelettrici: Sbarramento a riflessione polarizzata
Il suo funzionamento è simile allo sbarramento a
riflessione, questo tipo utilizza un filtro polarizzato per
risolvere il problema di rilevamento di oggetti lucidi o
altamente riflettenti. Infatti il filtro polarizzato posto di
fronte all'emettitore fa sì che il raggio di luce venga
convogliato su un piano, che colpendo il riflettore viene
ruotato di 90° diventando così visibile all'emettitore
attraverso un ulteriore filtro, posto davanti ad esso
chiamato analizzatore. La presenza di un oggetto
altamente riflettente, tra fotocellula e riflettore invece
ritorna al ricevitore luce sullo stesso piano di quello con
cui è stato raggiunto e quindi rilevato
Sensori fotoelettrici: tasteggio
Si basano in genere sulla riflessione diffusa di un fascio di luce ( in genere IR) da parte
del target. L'emettitore e il ricevitore sono nello stesso contenitore. La distanza operativa
è limitata e legata al colore e al tipo di superficie dell'oggetto da rilevare. La distanza di
lavoro diminuisce con superfici meno riflettenti o di colori più scuri. Questo tipo di
fotocellule vengono utilizzate per il rilevamento diretto dell'oggetto, per rilevamenti
precisi e determinati di piccoli oggetti e per rilevamenti con esclusione di superfici di
sfondo. Esistono vari tipi di tasteggio, in relazione all'applicazione, come tasteggio
diffuso e tasteggio focalizzato che sono usati in presenza per il rilevamento di piccoli
oggetti, e tasteggio con soppressione di sfondo che sono in grado di discriminare oggetti
di piccole dimensioni indipendentemente dallo sfondo a loro adiacente