Capitolo 1
Generalità sui Sistemi di
Comunicazione
1.1
Concetti introduttivi
Un sistema di comunicazione ha lo scopo di consegnare alla destinazione l’informazione
emessa dalla sorgente.
La sorgente può essere di tipo analogico o numerico: una sorgente analogica (ad esempio
un essere umano impegnato in una conversazione telefonica) produce un segnale a tempo
ed ampiezza continua (nel caso in esame è il segnale vocale, rappresentativo del modo di
variare nel tempo di una pressione acustica), mentre una sorgente numerica (come, ad
esempio, la tastiera di un PC) produce un segnale numerico ovvero a tempo discreto e con
codominio un insieme finito (nel caso della tastiera, una stringa di caratteri). Inoltre, il
segnale emesso dalla sorgente è non noto al destinatario: per questo motivo è necessario
modellarlo come una realizzazione di un segnale stocastico (processo aleatorio). Di conseguenza, sia per sorgenti analogiche che per sorgenti numeriche, l’uscita va intesa come
realizzazione di un processo aleatorio m(t), denominato nel seguito segnale di informazione. È importante altresı̀ evidenziare che la maggior parte delle sorgenti di informazione
non produce segnali elettrici e sono, quindi, necessari opportuni trasduttori in ingresso
(a valle della sorgente) ed in uscita (a monte della destinazione) per passare dal segnale
di informazione (in senso stretto) ad un segnale elettrico (ad esempio, un microfono che
trasforma la pressione acustica in un segnale elettrico) e viceversa.
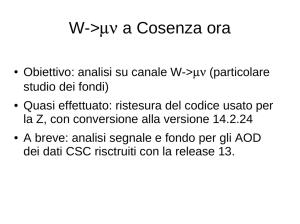
Un sistema di comunicazione si compone di tre elementi essenziali: il trasmettitore, il
canale fisico ed il ricevitore come illustrato dallo schema a blocchi descritto in Figura 1.1.
In realtà la Figura 1.1 si riferisce al caso di trasmissione in un solo verso (simplex) e
11
12
Capitolo 1. Generalità sui Sistemi di Comunicazione
m(t)
-
u(t)
Trasmettitore
(t)
m
r(t)
-
Canale
-
Ricevitore
-
Figura 1.1: Elementi di un sistema di comunicazione.
ad una sorgente analogica; trasmissioni nei due versi (duplex) richiedono la presenza di
un trasmettitore e di un ricevitore a ciascuna delle due estremità del canale. Un sistema
si dice full duplex (FDX) se il canale consente la trasmissione simultanea in entrambe le
direzioni. Viceversa, un sistema si dice half duplex (HDX) se la trasmissione nelle due
direzioni non avviene contemporaneamente.
Il trasmettitore elabora il segnale proveniente dalla sorgente per adattarlo alle caratteristiche del canale fisico o canale trasmissivo. Quasi sempre tale elaborazione include la
modulazione e, spesso, per sistemi di comunicazione numerici, la codifica; l’operazione di
modulazione sarà l’oggetto dei Capitoli 2 e 4 mentre per la codifica si rimanda a [1, 2].
Il canale trasmissivo è il mezzo fisico che realizza la connessione tra la sorgente e la
destinazione. Può trattarsi di un canale wireline (come la linea bifilare o intrecciata, il
cavo coassiale, la guida d’onda), di una fibra ottica, di un canale wireless (atmosfera o
spazio libero). Nel caso del canale wireless il segnale elettrico viene trasdotto in un’onda
elettromagnetica da un’antenna in trasmissione ed un’altra antenna in ricezione esegue
l’operazione inversa. Le due antenne sono usualmente considerate parte integrante del
canale trasmissivo. La maggior parte dei canali trasmissivi sono di tipo passabanda e
sono utilizzabili in preassegnati intervalli di frequenze. In Tabella 1.1 sono riportati alcuni
esempi di canali che realizzano la propagazione guidata delle onde elettromagnetiche e le
frequenze a cui essi sono comunemente utilizzati. Si noti che, per le fibre ottiche, si è soliti
far riferimento alle lunghezze d’onda piuttosto che alle frequenze (nello spazio libero una
lunghezza d’onda di 3µm corrisponde ad una frequenza di 100 THz = 1014 Hz).
Mezzo trasmissivo
linee bifilari
cavi coassiali
guide d’onda
fibre ottiche
fibre ottiche
fibre ottiche
Intervalli di frequenze o di lunghezze d’onda
1-300 kHz
300 kHz - 1 GHz
1 GHz - 300 GHz
0.8-0.9 µm (I finestra)
1.25-1.35 µm (II finestra)
1.5-1.55 µm (III finestra)
Tabella 1.1: Mezzi trasmissivi che realizzano la propagazione guidata delle onde elettromagnetiche e intervalli di frequenze (o di lunghezze d’onda) in cui è possibile utilizzarli
(valori indicativi).
La propagazione delle onde elettromagnetiche nell’atmosfera può avvenire secondo (almeno) tre diversi meccanismi; quello dominante dipende dalle caratteristiche frequenziali
1.1. Concetti introduttivi
13
del segnale consegnato ai morsetti di antenna; si parla, a seconda dei casi, di propagazione
per onde di superficie, per riflessione ionosferica e di collegamento in visibilità (dall’inglese,
rispettivamente, “ground-wave, sky-wave e line of sight propagation”). La propagazione
in banda MF (dall’inglese “Medium Frequency”, 0.3-3 MHz) avviene (prevalentemente)
per onde di superficie: la rifrazione tende a curvare l’onda che segue il profilo della superficie terrestre (oltre l’orizzonte visivo); questa è la banda di frequenze adoperata per la
radiodiffusione di segnali ottenuti ricorrendo alla modulazione DSB AM convenzionale (o
semplicemente AM). La propagazione ionosferica sfrutta la riflessione (in realtà si tratta
di un fenomeno di rifrazione: le onde sono curvate dalla rifrazione e descrivono una “U
rovesciata”) dell’onda stessa da parte della ionosfera, che è formata da diversi strati di
particelle ionizzate posizionati ad altezze comprese tra i 70 e i 400 chilometri (km) sopra
la superficie terrestre. Durante il giorno, lo strato più basso della ionosfera, tra i 70 e i 90
km (denominato strato D) è particolarmente intenso a causa dell’azione dei raggi cosmici
e delle radiazioni ultraviolette. Tale strato attenua le onde radio con frequenze al di sotto
dei 2 MHz (ma maggiori di 300 kHz), limitando la propagazione attraverso le sky-wave
dei segnali AM. Dopo il tramonto, invece, la densità elettronica nello strato D si riduce
drasticamente e, come conseguenza, l’attenuazione associata a tale strato; di conseguenza,
i segnali AM possono propagarsi (su distanze notevoli) sfruttando la riflessione ionosferica
nello strato F (posizionato ad un’altezza tra 140 e 400 km). La propagazione ionosferica
che rappresenta il modo dominante delle onde radio HF (dall’inglese “High Frequency”,
3-30 MHz), diviene trascurabile al di sopra dei 30 MHz (anche se sono possibili forme di
diffusione ionosferica e troposferica, rispettivamente, nelle bande di frequenze 30-60 MHz
e 40-300 MHz). Al di sopra dei 30 MHz, comunque, i segnali radio non subiscono significative attenuazioni nel passaggio attraverso la ionosfera e questo rende possibile realizzare, a
partire dalle frequenze in banda VHF (dall’inglese “Very High Frequency”, 30-300 MHz),
collegamenti tra trasmettitori/ricevitori terrestri e satellitari o extraterrestri. A partire
dalla banda delle VHF la forma di propagazione predominante delle onde elettromagnetiche è quella in visibilità (LOS, dall’inglese “Line of Sight”). La propagazione in visibilità è
limitata dalla curvatura terrestre: se l’antenna trasmittente è montata ad un’altezza h in
metri (m) sulla superficie terrestre, la distanza dell’orizzonte radio, in assenza
√ di ostruzioni fisiche, montagne, edifici, etc., è approssimativamente pari a d = 4.122 h km (si veda
l’Appendice A per ulteriori dettagli su tale risultato).
Quindi, nei sistemi di comunicazione che utilizzano come canale fisico l’atmosfera o
lo spazio libero la forma di propagazione predominante è quella in visibilità, anche se va
ricordato che la modulazione AM fa uso della propagazione per onde di superficie e, sotto
particolari condizioni, del canale ionosferico.
Ogni canale introduce una certa quantità di attenuazione con ciò intendendo che la
potenza del segnale si riduce al crescere della distanza dal trasmettitore. Nel seguito descriveremo il canale trasmissivo attraverso un sistema. Se si denotano con u(t) e v(t) i
segnali, rispettivamente, in ingresso e in uscita al sistema e con Pu e Pv le corrispondenti potenze, espresse tipicamente in Watt (W) o in milliWatt (mW), è possibile definire
l’attenuazione o perdita in trasmissione (in potenza) subita dal segnale nella trasmissione
dalla sorgente alla destinazione (e in ipotesi di adattamento per il massimo trasferimento
14
Capitolo 1. Generalità sui Sistemi di Comunicazione
di potenza dall’ingresso all’uscita) come
L,
Pu
.
Pv
L’attenuazione è il reciproco del guadagno G del sistema (G = 1/L) ed entrambe sono usualmente espresse in decibel (dB); ad esempio, il valore dell’attenuazione in unità
logaritmiche1 è
Pu
L (dB) , 10 log10 .
Pv
A seconda del tipo di canale l’attenuazione può dipendere dalla distanza tra la sorgente
e la destinazione con legge esponenziale (come accade nei mezzi che realizzano la propagazione guidata come, ad esempio, le linee bifilari, il cavo coassiale, la guida d’onda, la
fibra ottica) oppure quadratica, come accade per la perdita dovuta alla propagazione nello
spazio libero (quando non siano presenti perdite aggiuntive di tipo dissipativo). Nel caso
di dipendenza esponenziale dell’attenuazione dalla distanza è consuetudine far riferimento
all’attenuazione chilometrica; in altri termini, l’attenuazione L può essere espressa nella
forma
α·d
L = 10 10
dove d è la lunghezza del collegamento ed α è l’attenuazione introdotta dal mezzo trasmissivo per coprire una distanza di un chilometro (attenuazione chilometrica). Evidentemente
L (dB) = α · d.
In Tabella 1.2 sono riportati i valori indicativi di α per alcuni mezzi trasmissivi. La
AWG (dall’inglese American Wire Gauge) o semplicemente Gauge, riportata con riferimento alla linea bifilare, è indicativa dello spessore dei conduttori di rame: 16 Gauge
corrisponde, ad esempio, ad un diametro di 1.291 millimetri; inoltre, al crescere del valore
numerico il diametro dei conduttori di rame si riduce e, tipicamente, aumenta l’attenuazione chilometrica. Dalla tabella si evince che ciascuno dei mezzi trasmissivi è “utilizzabile”
in un certo intervallo di frequenze: ad esempio, il cavo coassiale è utilizzabile dai 100 kHz
a qualche GHz. Al di fuori di questo intervallo di frequenze è più conveniente ricorrere ad
altri mezzi trasmissivi; ad esempio, al di sopra di 1 GHz diventa problematico (e quindi
costoso) realizzare cavi coassiali con attenuazione chilometrica dell’ordine di qualche dB
ed è preferibile ricorrere alle guide d’onda. Si veda l’appendice A per ulteriori informazioni
sul calcolo della potenza ricevuta, in funzione di quella trasmessa, nello spazio libero.
Il ricevitore opera sul segnale in uscita al canale amplificandolo, in modo da compensare
l’attenuazione introdotta dal canale, e filtrandolo (l’opportunità di filtrare il segnale in
uscita al canale sarà chiara tra breve). Il ricevitore ha lo scopo di recuperare una “replica
(t) del segnale trasmesso2 .
fedele” m
1
I valori in dB si riferiscono necessariamente a rapporti di potenze; tuttavia, si può esprimere la potenza
P di un segnale in dB dividendola per una potenza di riferimento P0 ; a seconda che si utilizzi P0 = 1 W
o P0 = 1 mW come valore di riferimento si ottiene il valore di P in dBW o in dBm.
2
Si tornerà nei prossimi capitoli su tale concetto distinguendo tra sorgenti d’informazione analogiche e
numeriche.
15
1.1. Concetti introduttivi
Mezzo trasmissivo
Frequenza
linea bifilari (0.3 cm di diametro)
1 kHz
linea bifilare intrecciata (16 Gauge)
10 kHz
linea bifilare intrecciata (16 Gauge)
100 kHz
linea bifilare intrecciata (16 Gauge)
300 kHz
cavo coassiale (1 cm di diametro)
100 kHz
cavo coassiale (1 cm di diametro)
1 MHz
cavo coassiale (1 cm di diametro)
3 MHz
cavo coassiale (15 cm di diametro)
100 MHz
guida d’onda (5 × 2.5 cm)
10 GHz
fibra ottica
0.82 µm
fibra ottica
1.55 µm
α (dB/km)
0.05
2
3
6
1
2
4
1.5
5
3.5
0.25
Tabella 1.2: Valori indicativi dell’attenuazione chilometrica per alcuni mezzi trasmissivi.
Nella trasmissione del segnale di informazione si manifestano, in aggiunta all’attenuazione, diversi effetti indesiderati. Il segnale viene, infatti, distorto e corrotto dalla presenza
di interferenza e rumore che producono nell’insieme un’alterazione della forma del segnale.
Nonostante tali alterazioni possano manifestarsi in ogni punto del sistema, è opportuno
associarle al canale trasmissivo modellando il trasmettitore ed il ricevitore come dispositivi ideali (il rumore generato nei primi stadi del ricevitore può essere infatti riportato in
ingresso al ricevitore stesso ovvero in uscita al canale).
La distorsione è il risultato di una imperfetta risposta del sistema al segnale desiderato.
Infatti, la rapidità di variazione nel tempo del segnale in ingresso dipende dalla sua banda
(ad esempio, l’estensione dell’intervallo di frequenze che contiene il 98% della potenza
del segnale). D’altro canto la capacità del sistema di seguire le variazioni del segnale in
ingresso (senza distorcerlo) dipende dalla sua larghezza di banda. I canali fisici hanno una
banda finita che limita il tasso di variazione (la larghezza di banda) dell’eventuale segnale
analogico o il numero di bit per unità di tempo (bit rate) del segnale numerico che, come
vedremo, è direttamente legata alla larghezza di banda del segnale a tempo continuo ad
esso associato. Ad esempio, la larghezza di banda (chilometrica) dei mezzi trasmissivi che
realizzano la propagazione guidata delle onde elettromagnetiche varia dalle centinaia di
kHz della linea bifilare ai MHz dei cavi coassiali, per arrivare ai GHz delle fibre ottiche.
Da un punto di vista più strettamente matematico (e più generale), indicato con u(t) il
segnale in ingresso al sistema, diremo che l’uscita v(t) è una versione indistorta del segnale
d’ingresso se
v(t) = Au(t − td ), A ∈ R, td ∈ R+ .
dove (il valore assoluto di) A è il fattore di attenuazione e td il ritardo di propagazione.
Quindi, un sistema è non distorcente, indipendentemente dal segnale in ingresso, se esso è
LTI con risposta in frequenza
H(f ) = A e−j2πf td ,
f ∈ R.
16
Capitolo 1. Generalità sui Sistemi di Comunicazione
La precedente caratterizzazione può essere riscritta come
(
A(f ) , |H(f )|
= |A|,
ϕ(f ) , arg(H(f )) = −2πf td + kπ,
k ∈ Z,
f ∈ R,
(1.1)
ed equivale ad imporre che la risposta in ampiezza del sistema sia costante e la risposta in
fase sia lineare (a meno del fattore kπ, k ∈ Z). Se si definisce il ritardo di gruppo, tg (f ),
come
1 dϕ(f )
tg (f ) , −
,
2π df
la seconda delle due condizioni implica che tg (f ) = td . In altri termini un sistema non
distorcente introduce un ritardo di gruppo costante.
Va, tuttavia, evidenziato che la precedente definizione di sistema non distorcente è in
realtà molto restrittiva e per questo motivo di scarso interesse nella pratica. È possibile
pervenire a caratterizzazioni del sistema di maggior interesse se si restringe la classe dei
segnali in ingresso. Se, ad esempio, ci si limita a considerare la classe dei segnali (in
ingresso) di tipo passabasso, limitati nella banda (−B, B), il comportamento del sistema
è non distorcente, se esso è LTI e le precedenti condizioni sull’andamento della risposta in
ampiezza e in fase sono soddisfatte con riferimento alla banda (−B, B).
Un sistema LTI che non soddisfi le precedenti condizioni distorce il segnale: si parla in
tal caso di distorsione lineare (di ampiezza e/o di fase). In realtà la distorsione può risultare
più o meno dannosa in relazione al tipo di applicazione che si considera. Ad esempio,
l’orecchio umano è sensibile alla distorsione di ampiezza, ma poco sensibile alla distorsione
di fase; per questo motivo nei sistemi telefonici ci si deve preoccupare soprattutto degli
effetti della (eventuale) distorsione di ampiezza. Nella trasmissione dei segnali video,
invece, la distorsione di fase può diventare intollerabile: infatti, la distorsione di fase
implica una non perfetta messa a fuoco dei dettagli a cui l’occhio umano è sensibile. Nella
trasmissione dati la distorsione di fase può dar luogo ad interferenza intersimbolica; infatti,
è facile rendersi conto che il segnale può risultare profondamente distorto, anche in assenza
di distorsione di ampiezza, se le componenti spettrali in uscita al sistema non sono nella
corretta relazione di fase.
Se, invece, il canale è descritto da un modello non lineare oppure, pur essendo lineare,
è temporalmente variante, allora l’uscita del sistema sarà ancora una volta una versione
distorta dell’ingresso. In questo caso la distorsione è legata alla presenza nel segnale di
uscita di componenti frequenziali non presenti nel segnale d’ingresso. Si parla in tal caso
di distorsione non lineare. Esempi di canali tempo varianti sono il canale radiomobile
ed anche il canale ionosferico (utilizzato per la trasmissione a lunga distanza nella banda HF). Con riferimento a questi canali il segnale arriva al ricevitore attraverso cammini
multipli caratterizzati da differenti valori del ritardo di propagazione (in inglese si parla
di “signal multipath”). In un sistema di comunicazione numerico il multipath dà luogo
all’interferenza intersimbolica concetto su cui ci si soffermerà nel Capitolo 4; inoltre, poiché i differenti contributi arrivano al ricevitore con ritardi diversi (e variabili nel tempo)
essi possono sommarsi in modo costruttivo o distruttivo dando luogo ad un’attenuazione
aleatoria e variabile nel tempo ovvero al cosiddetto fenomeno del “fading”. In questi casi
il canale radio deve essere modellato tramite un sistema lineare, ma tempo variante, con
1.1. Concetti introduttivi
17
risposta impulsiva aleatoria (tuttavia la modellizzazione del canale radio esula dagli scopi
di questo testo; il lettore interessato può consultare [7]).
L’interferenza è legata alla presenza di altre sorgenti di segnale come accade, ad esempio, nei casi di utilizzo simultaneo di un canale (wireless o wireline) da parte di più utenti
(in realtà sarebbe necessario precisare il concetto di simultaneità che può assumere sfumature diverse). Il filtraggio del segnale in uscita dal canale consente di sopprimere l’interferenza e i disturbi allocati in bande di frequenze diverse da quelle occupate dal segnale
utile (cioè utilizzato per trasmettere il segnale di informazione).
Il rumore può essere sia interno che esterno al sistema: nella maggior parte dei sistemi
di comunicazione è presente un rumore additivo di natura termica, prodotto dal moto di
agitazione termica dei portatori di carica nei dispositivi resistivi o a stato solido relativi
ai primi stadi del ricevitore (che realizzano come già detto le funzioni di amplificazione
e filtraggio del segnale in uscita dal canale). Tale rumore può essere modellato come
un processo gaussiano e bianco (per maggiori dettagli si rimanda all’appendice B). Nei
sistemi senza fili possono essere presenti altre sorgenti di rumore quali il rumore cosmico,
soprattutto in banda VHF e UHF (dall’inglese “Ultra High Frequency, 0.3-3 GHz), quello
atmosferico, nelle bande VLF, LF (dall’inglese, rispettivamente, “Very Low Frequency”, 330 kHz, e “Low Frequency”, 30-300 kHz) e MF, e il rumore di origine artificiale (in banda
MF) come, ad esempio, quello prodotto dai dispositivi di iniezione delle automobili. Il
rumore cosmico, quello atmosferico e quello di origine artificiale sono raccolti dall’antenna
del ricevitore. Un esempio di rumore atmosferico è quello che ha origine dalle scariche
elettriche associate ai forti temporali che si verificano (soprattutto) nelle zone equatoriali.
L’operazione di filtraggio consente di eliminare solo parte dei disturbi presenti.
Il progetto e l’analisi di un sistema di comunicazione richiedono di rappresentare il
canale fisico attraverso un modello matematico. Dalle precedenti considerazioni si evince
che la definizione del modello non è indipendente dal particolare canale fisico utilizzato.
Tuttavia, in molti casi un attento progetto preliminare dei segnali in gioco consente di
ipotizzare che il canale sia non distorcente; se, in aggiunta, il rumore presente è quello
termico esso può essere modellato come gaussiano bianco ed additivo e si parla di canale
AWGN (dall’inglese “Additive White Gaussian Noise”). Da un punto di vista matematico
il canale AWGN è descritto dal seguente legame ingresso/uscita:
r(t) = Au(t − td ) + w(t),
dove u(t) ed r(t) denotano, rispettivamente, il segnale in ingresso e quello in uscita al
canale fisico, A è un fattore di attenuazione, td è il ritardo di propagazione, ed w(t) è un
processo aleatorio gaussiano bianco con Densità Spettrale di Potenza (PSD) (costante) e
pari a N0 /2.
Il modello AWGN descrive accuratamente un’ampia classe di canali trasmissivi. Infatti,
come si è già evidenziato, tale modello è valido se è lecito trascurare la distorsione del
segnale in ingresso al canale e se la principale sorgente di disturbo è il rumore termico.
Inoltre, il modello AWGN è analiticamente trattabile; di conseguenza, si farà largo uso di
tale modello per il progetto e l’analisi delle prestazioni dei sistemi di comunicazione.
18
Capitolo 1. Generalità sui Sistemi di Comunicazione
1.2
Scopi della modulazione
Molto spesso il segnale di informazione non può essere direttamente trasmesso sul canale
fisico senza subire significative distorsioni. Nel caso di un segnale analogico la sua PSD
potrebbe non essere compatibile con le caratteristiche del canale trasmissivo (perché, ad
esempio, il segnale di informazione è di tipo passabasso mentre il canale è un filtro LTI di
tipo passabanda). Con riferimento, invece, al segnale emesso da una sorgente discreta è
necessario tener presente che esso è a tempo discreto mentre il canale fisico è sempre un
sistema a tempo continuo.
Per questo motivo è necessario interporre tra la sorgente ed il canale un dispositivo o
sistema che realizzi l’adattamento. La trasformazione operata da tale sistema, detto modulatore, è la modulazione: il segnale m(t) in ingresso al sistema, detto segnale modulante,
viene opportunamente trasformato al fine di ottenere il segnale modulato (u(t)) (l’uscita del sistema); spesso tale operazione si realizza modificando i parametri di un segnale
sinusoidale, detto segnale portante.
Le modulazioni si possono classificare in modulazioni analogiche e numeriche. Le modulazioni analogiche realizzano la trasformazione di un segnale modulante analogico (m(t))
mentre quelle numeriche operano a partire da segnali numerici (m(k)). Le modulazioni
numeriche possono essere utilizzate anche per trasmettere segnali analogici a valle di una
conversione analogico/numerica (conversione A/D). Tra le modulazioni analogiche hanno particolare interesse quelle ad onda continua caratterizzate dal fatto che il segnale
modulante modifica l’ampiezza o la fase (o entrambe) di un segnale di tipo sinusoidale
(la portante). Nelle modulazioni analogiche ad impulsi, invece, la portante è un segnale
periodico ottenuto dalla replicazione di un impulso. Nei prossimi capitoli si descriverarro le modulazioni analogiche ad onda continua (capitolo 2) e le principali modulazioni
numeriche (capitolo 4).
Numerosi sono i motivi che rendono opportuna o necessaria la modulazione. Nel seguito
si elencano quelli principali:
• Per irradiare i segnali di informazione in modo efficiente è necessario che le antenne
abbiano dimensioni almeno dell’ordine di un decimo della lunghezza d’onda da trasmettere; quindi per segnali di tipo passabasso (ad esempio il segnale vocale la cui
banda va dai 300 Hz ai 3400 Hz), occorrerebbero antenne di dimensioni proibitive.
Con la modulazione, invece, lo spettro del segnale di informazione viene traslato in
un intorno della frequenza, opportunamente elevata, della portante; l’operazione di
modulazione consente, quindi, di ridurre notevolmente le dimensioni delle antenne.
• La banda passante W ′ dei dispositivi LTI utilizzati in un sistema di comunicazione
(amplificatori, filtri, canale di comunicazione, etc.) deve contenere la banda W del
segnale da elaborare per evitare che esso venga distorto. D’altro canto la pratica
realizzazione di un sistema LTI di tipo passabanda necessita di imporre che esso
sia a banda stretta ovvero, denotata con fc la frequenza di centro banda, la banda
relativa W ′ /fc deve essere sufficientemente piccola3 . Quindi, per aumentare W ′ senza
3
È ragionevole assumere che:
0.01 ≤
W′
≤ 0.1.
fc
1.2. Scopi della modulazione
19
violare l’ipotesi di banda stretta del sistema (e, quindi, del segnale, tenuto conto del
fatto che W < W ′ ) è necessario ricorrere alla modulazione e scegliere la frequenza
della portante fc sufficientemente elevata.
• In linea di principio si può pensare di combattere l’effetto dei disturbi additivi aumentando la potenza del segnale trasmesso sul canale; tuttavia, questa strada è costosa
e, in aggiunta, non tiene conto dei limiti fisici dei dispositivi utilizzati. D’altro canto,
alcune modulazioni (sia analogiche che numeriche) consentono di sopprimere in modo più efficace di altre l’interferenza ed il rumore; in questi casi, per combattere la
presenza dell’interferenza e del rumore, si deve trasmettere un segnale modulato con
una banda sufficientemente maggiore di quella del segnale modulante. Più in generale, è possibile barattare la banda impegnata dal segnale con la potenza trasmessa
a parità di qualità della trasmissione.
• La modulazione consente la condivisione del canale tra più utenti; stazioni radio differenti possono, ad esempio, coprire la stessa area geografica se trasmettono utilizzando
porzioni diverse dello spettro elettromagnetico; i segnali possono essere separati in
ricezione con l’ausilio di appositi filtri. Più in generale, le modulazioni analogiche
e quelle numeriche consentono di trasmettere sullo stesso canale (ed eventualmente
con lo stesso trasmettitore) più segnali “contemporaneamente” (nel caso si utilizzi
lo stesso trasmettitore si costruisce un segnale multiplex).