Fondamenti
sui Sensori applicati nella
Robotica
(Seconda Parte)
Ph.D Ing. Folgheraiter Michele
Corso di Robotica
Prof.ssa Gini Giuseppina
2006/2007
31
Sensori termo-resistivi (Temperatura)
(Metalli)
• In un range di temperatura relativamente ristretto
ρ = ρ 0 [1 + α (T − T0 )]
• dove α = coefficiente di temperatura resistivo (TCR)
• ρ0=resistività alla temperatura di riferimento T0
(es. 0°C o 25°C)
• Per intervalli di temperatura più complessi si
ricorre a polinomi, esempio per il tungsteno
ρ = 4.45 + 0.0269 T + 1.914 10-6 T2
(con T in °C)
32
1
• Metalli Ö PTC ( ↑ T ⇔↑ R )
• Il coefficiente α (TCR) deve essere basso per resistori
utilizzati in circuiti elettronici
• Al contrario, α deve essere il più alto possibile per
realizzare sensori di temperatura (termistore)
• Esempio: Platino (sensore Pt100) opera in un range
tra -200°C e 600°C (PTC)
R = R0 (1.0036 + 36.79 ⋅10 −4 T )
33
Sensori termo-resistivi a Semiconduttore
• Molti semiconduttori e ossidi possiedono una caratteristica resistenzatemperatura non lineare, NTC ( ↑ T ⇔↓ R ) .
RT = R0
⎛1 1 ⎞
⎟
β ⎜⎜ −
T T0 ⎟⎠
e ⎝
β è la temperatura caratteristica del materiale in Kelvin
(3000-5000 K). [0°K=-273,15°C]
OSS: Quando sono richieste accuratezze spinte si ricorre ad
34
approssimazioni polinomiali.
2
Sensori piezoelettrici (Curie1880)
(Forza)
• Fenomeno presente in cristalli naturali (quarzo)
• Consiste nella generazione di carica elettrica da parte di
un materiale cristallino sottoposto ad una sollecitazione
meccanica
• E’ un effetto reversibile:
energia meccanica
energia elettrica
eu = kF
eu = f .e.m. ai morsetti A e B
F = Forza applicata
35
Sensori piezoresistivi (Strain-gauge)
(Forza)
E’ l’effetto di variazione della resistività di un opportuno
materiale quando è soggetto ad una deformazione dovuta ad
uno sforzo ad esso applicato (ridotto nei materiali metallici, più
consistente nei semiconduttori).
Materiale PiezoResistivo
ΔR
ΔL
=S
R0
L0
Materiale di Supporto
Sforzo:
•
•
•
•
σ=
F
ΔL
=E
a
L0
E = modulo di Young del materiale [N/m2]
F = forza applicata [N]
a = sezione interessata [m2]
S= gauge Factor
F=
a⋅E
ΔR
S ⋅ R0
36
3
• Il resistore è saldato su un substrato portante elastico,
che viene fissato sull’ oggetto che si deforma
• Il resistore è quindi isolato elettricamente dall’ oggetto
• Il coefficiente di espansione termica del substrato deve
essere coincidente con quello del materiale di cui è fatto
il resistore
• Per avere una buona sensibilità il sensore deve avere
lunghi segmenti longitudinali e corti segmenti
trasversali, così la sensibilità trasversale è molto minore
rispetto a quella longitudinale
37
• La pista di materiale
piezoresistivo può essere
considerata come un
cilindrico che subisce una
elongazione (il volume V rimane costante), esso possiede
una resistenza pari a:
R=ρ
V = al
l
a
da cui si ricava la sensibilità:
dR ρ
=
dl a
che è tanto migliore quanto più stretto è il cilindro e
quanto maggiore è la resistività del materiale.
S=
dR
dl
S = Sensibilità (“gauge factor”)
[2-6 per metalli, 40-200 per semiconduttori]
38
4
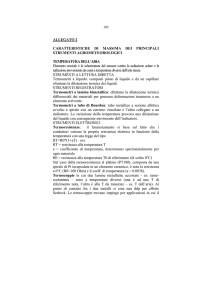
Esempio di sensore di Forza/Momento per Manipolatore
E’ montato tra la fine del braccio e
il polso.
Vi sono solitamente 8 strain gauge
disposti sulle 4 lamine deformabili.
39
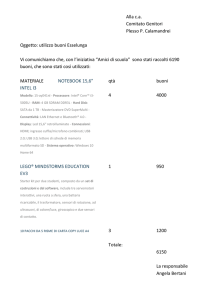
A noi interessa passare dalle 8 misurazioni, effettuate con i sensori di forza, ai 3
momenti e le 3 forze secondo i tre assi cartesiani. Quindi è necessario
determinare la matrice RF .
Attraverso una fase di calibrazione si forniscono delle forze e dei momenti
noti, si misurano i valori delle resistenze dei sensori, quindi si calcolano i
parametri della matrice M (che devono soddisfare la seguente equazione).
w1x
w1 y
w2 y
w2 z
=M⋅
w3 z
w3 x
w4 y
w4 z
Rx
Ry
Rz
Mx
RF = M −1
My
Mz
40
5
z
Sensori ad Effetto
Hall (Prossimità)
y
(E.Hall 1879)
x
• In un materiale conduttore sottoposto ad un campo
magnetico Bz normale al flusso di una corrente elettrica di
intensità Ix, si manifesta una d.d.p. Vy in direzione
perpendicolare alle direzioni sia di Bz sia di Ix.
• Il fenomeno è dovuto al fatto che le cariche elettriche
(forza di Lorentz), in movimento per la presenza della
corrente, si accumulano su di una faccia del materiale per
effetto del campo magnetico, finché non si determina un
campo elettrico agente sugli elettroni tale da opporsi e
compensare la forza dovuta al campo magnetico.
• Sensori Hall sono usati per rilevare campi magnetici,
posizione e spostamento di oggetti
41
•
La tensione di Hall può essere
prelevata con opportuni elettrodi.
E’ bassa nei conduttori e negli
isolanti, alta nei semiconduttori)
•
Non sono molto lineari rispetto all’
intensità del campo B e quindi
richiedono una calibrazione per
misure di precisione
•
ES: un dispositivo commerciale
(arseniuro di indio) con una
corrente di controllo di 0.1A,
presenta una tensione di Hall pari
a
0.15V per un campo di
induzione
magnetica
pari
a
1Wb/m2.
Nb: q<0
Usato come sensore angolare
42
6
Sensori ad effetto
fotoconduttivo
(Sensori passivi)
(Intensità Luminosa)
• Variazione di resistività in materiali investiti da radiazioni di
varie lunghezza d’onda.
• Si utilizzano materiali semiconduttori.
• La radiazione incidente consente il passaggio di elettroni da
uno stato di legame ad uno libero, questi non hanno energia
sufficiente per uscire dal materiale (fotoemissione), ma
contribuiscono alla conduzione facendo diminuire la resistività.
• E’ necessario collegare il sensore ad un generatore di tensione
per ottenere un flusso di corrente elettrica misurabile e
dipendente dall’intensità della radiazione incidente.
43
Sensori ad Effetto
Fotovoltaico
p
n
(Sensori attivi)
(Intensità Luminosa)
• Permette la conversione di energia elettromagnetica in energia
elettrica (celle solari).
• Si presenta nelle giunzioni p-n dei semiconduttori, sottoposte a
radiazioni danno luogo alla comparsa di una f.e.m.
• Illuminando la giunzione si producono coppie elettroni-lacune
(combinazioni tipiche sono selenio-ferro e rame-ossidoDiRame)
• Fototransitor sono elementi fotovoltaici usati come interruttori
nei quali piccole quantità di luce sono in grado di produrre la
commutazione del circuito dalla condizione di minima corrente
44
a quella di corrente elevata
7
Sensori ad ultrasuoni
(velocità di un fluido)
(Effetto Doppler, 1842)
• Consiste nella variazione di frequenza delle onde acustiche,
ottiche , radio dovuta al moto relativo tra sorgente dell’onda
riflessa e ricevitore.
f1 − f 2 = k v
f1 = Frequenza dell’onda incidente
f2 = Frequenza dell’onda riflessa
v = Velocità media del fluido
f = 200 KHz
45
Encoder Ottici
Permettono di misurare la posizione del giunto:
Encoder Assoluto
In questo caso la posizione è
determinata in modo assoluto,
sono formati da un disco di
materiale trasparente su cui sono
applicate delle zone oscurate .
Encoder commerciali hanno 12
tracce, le quali consentono una
risoluzione pari a :
⎡ 360° ⎤
⎢⎣ 212 ⎥⎦ = 0,08°
46
8
Encoder Incrementale
In questo caso la posizione è determinata in modo
relativo; sul disco sono presenti due tracce in cui i
settori (trasparenti/opachi) sono in quadratura tra di
loro. Molte volte è presente una terza traccia con un
unico settore oscurato che permette di definire il
riferimento iniziale.
Rispetto gli encoder assoluti, dove la posizione è
codificata direttamente sul disco, questo tipo di
encoder necessita di un circuito elettronico in grado
di ricostruire la posizione dal tipo di impulsi
generati durante la rotazione.
Sono più economici rispetto agli encoder assoluti
perché di più facile realizzazione, quindi sono i più
utilizzati.
47
Sistemi Per Rilevare
la DISTANZA
48
9
Metodo di Triangolazione
Il movimento di scansione
avviene sul piano definito
dalla
linea
che
va
dall'oggetto al rivelatore e
dalla linea che va dal
rivelatore alla sorgente.
Si orienta l’emettitore
fintantoché
il rilevatore
misura la massima intensità
di luce riflessa.
d = x ⋅ sen(90 − α ) = x ⋅ cos(α )
s = x ⋅ cos(90 − α ) = x ⋅ sen(α )
Conoscendo la posizione
del rilevatore è possibile
ricostruire le coordinate 3D
dell’oggetto.
Telemetro a sfasamento
d=
s
tgα
49
(distanza)
Si separa la luce emessa in due parti: una
viene fatta rimbalzare sull’oggetto, l'altra su
degli specchi posti ad una distanza nota.
Si hanno così due cammini ottici che
provocano uno sfasamento tra i due segnali.
Calcolando la differenza delle due onde
ho un segnale con ampiezza risultante
dipendente dallo sfasamento (ampiezza
minima se le onde sono in fase e ampiezza
massima se sono in contro-fase).
Dmax< λ/2
E/R
λ
50
10
La lunghezza d'onda λ della luce laser λluce utilizzata per questi
sensori è dell'ordine dei micrometri (per esempio 632.8 nm per un
laser a elio-neon) ma in robotica si misurano distanze degli ordini
del metro, quindi occorre una λ dell'ordine di qualche metro.
Si riesce a superare il problema modulando il laser con una
portante a frequenza più bassa: f = 10 MHz (lunghezza d'onda di
30 m ).
λ=
c
[ m]
f
c = 300000 Km / s
51
Telemetro a Tempo di volo
(distanza)
Funziona misurando le distanze attraverso il tempo di volo
di un segnale da sensore a oggetto ed ancora a sensore.
Trasmettitore e ricevitore sono solitamente sensori
piezoelettrici che funzionano ad impulso o ad onda
continua.
Lo spazio percorso è 2d mentre il tempo di percorrenza è 2d/c=ΔT
(c=velocità dell’onda)
52
11
Tuttavia la velocità della luce è troppo elevata 300.000 Km/s, va
bene per distanze molto elevate, in Robotica si preferisce usare
onde sonore : ν = 340m / s
Anche se le onde acustiche hanno una scarsa direzionalità ,
solitamente il cono di apertura è 20-40° contro 0.1° del laser.
Si verificano così i seguenti problemi:
1. Misurazione imprecisa del fronte di
salita
2. Radiazione riflessa attenuata (basso
rapporto segnale/rumore).
3. Non è possibile determinare la forma
degli oggetti, ma solo la distanza.
53
Applicazioni in Robotica Mobile:
Nei Robot mobili si utilizzano sensori a ultrasuoni che si
basano sul tempo di volo, vengono spesso usati come sensori di
prossimità in modo da evitare gli ostacoli. Grazie al basso
costo si costruiscono array di sensori che vengono poi disposti
lungo il perimetro del carrello.
54
12
Sensori di Contatto
( Mani Artificiali)
(Pressioni di contatto)
La capacità umana di manipolare
fortemente dal senso del tatto.
oggetti
dipende
Mediante il tatto, il nostro cervello è in grado di
raccogliere una miriade di informazioni dell’oggetto
manipolato:
• Temperatura
• Rugosità
• Forma
• Consistenza
Questo soprattutto grazie alla presenza, nella cute, di
diversi tipi di recettori (sensori) in grado di convertire
gli stimoli fisici in un segnale elettrico (impulsivo), che
grazie al sistema nervoso periferico viene trasmesso fino
al cervello.
55
Meccanocettori:
Corpuscoli di Pacini: Sensibili
a rapide vibrazioni (10-500Hz).
Corpuscoli
di
Vibrazioni (15-400Hz).
Ruffini:
Corpuscoli di Merkel: Sensibili
alla pressione (0-3Hz).
Corpuscoli
di
Meissner:
Sensibili a basse pressioni (340Hz).
Attualmente molti sistemi robotici presentano un
EndEffector equipaggiato di sensori di forza e momento.
In alcuni sistemi sperimentali sono presenti anche matrici
di sensori di contatto.
56
13
Array di elementi Resistivi
Permettono di rilevare una mappa 2D delle forze di
contatto tra l’EndEffector e l’oggetto manipolato.
La matrice sensitiva si forma grazie alla disposizione
ortogonale di due serie di elettrodi filiformi, separate da
uno strato di materiale piezoresistivo (trasduttore da forza).
Es) 32 (16*16) conduttori per una matrice di 256 elementi.
57
Caratteristiche richieste al materiale trasduttore:
•Un’ alta variazione di resistenza rispetto la
variazione di pressione (alta sensibilità), questo per
arrivare ad una elevata risoluzione.
•Valore di resistenza a vuoto dell’ordine dei 100 ohm,
in modo da poter lavorare con segnali di almeno
1Volt (I=10 mA) e quindi meno sensibili al rumore.
•Flessibilità, per adattarsi all’oggetto ispezionato.
•Alta capacità di carico 0-600.000Pa su singolo
2
10mm 2 ⎯
⎯→ 60 N
elemento ( 1mm 0,6 N)
•Buona ripetibilità
•Bassa isteresi
N
58
14
Possibile scelta per il materiale trasduttore:
Gomma caricata Carbonio: Il materiale viene preparato
da una miscela di gomma-siliconica e polvere di
carbonio.
•Basso costo di realizzazione
+
•Alto Stress a fatica del materiale, che viene danneggiato
dalle micro-particelle •Elevata isteresi
-
• Difficoltà ad ottenere un materiale omogeneo (resistività
non costante spazialmente) Tuttavia per particolari applicazioni le caratteristiche
meccaniche ed elettriche possono essere alterate secondo
le esigenze.
59
1bar ≡ 1 ⋅10 5 Pa
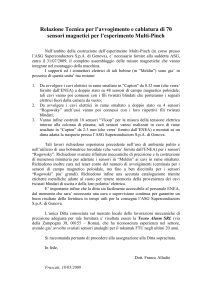
Costruzione del sensore
Su una piastrina di materiale plastico vengono depositate
delle piste di materiale conduttore.
Due file di conduttori vengono disposti ortogonalmente sulle
due facce opposte del materiale piezo-resitivo.
60
15
Per poter estrarre informazioni da ogni singolo elemento
dell’array è necessario esaminare un elemento per volta.
Questo è possibile grazie ad un multiplexer analogico
(serie di interruttori che mettono ad alta impedenza le
linee che non sono utilizzate).
E’ possibile leggere il valore trasdotto da ogni elemento
sensibile con una frequenza di 1MHz.
61
R1
R2
62
16
63
17