Esercizi svolti di Statica e Dinamica
1.
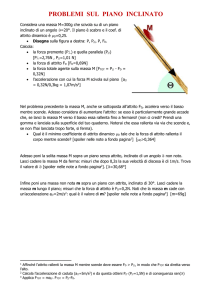
La massa m è sospesa come in figura. Nota la costante elastica k della
molla, determinarne l’allungamento ∆x in condizioni di equilibrio.
θ
m = 1.6 Kg ; θ = 30° ; k = 2 × 102 Nm-1
m
Il diagramma di corpo libero del punto di intersezione delle funi è mostrato
in figura. Applicando la condizione di statica del punto materiale si ha:
r
r
r
T1 + T2 + P = 0
T1 sen θ − T2 sen θ = 0
T1 cos θ + T2 cos θ − P = 0
da cui si ricava:
P
T1 = T2 =
2 cos θ
Per le proprietà delle funi ideali, la tensione sulla molla è pari in modulo a
T1. L’allungamento della molla è dato perciò dalla legge di Hook:
mg
= 4.5 cm
T1 = k ∆x ; ∆x =
2 cos θ k
y
r
T1
r
T2
r
P
x
2.
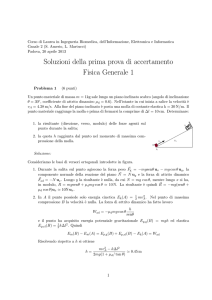
Una macchina di Atwood è realizzata collegando le masse m1, m2, m3
come mostrato in figura. La massa della carrucola è trascurabile; è
trascurabile anche l’attrito.
Nella condizione iniziale, le masse m1, m2 salgono, e la massa m3
scende, con velocità costante. Ad un certo punto la massa m2 si sgancia.
Determinare l’accelerazione delle rimanenti masse.
y
1
m1 = 2 Kg ; m2 = 1 Kg
2
Nella condizione iniziale le accelerazioni sono nulle. Quindi, con
riferimento ai diagrammi di corpo libero in figura, e tenendo conto delle
proprietà della fune supposta ideale:
T1 − (P1 + P2 ) = 0
T2 − P3 = 0
T1 = T2 = T
e quindi P3 = P1 + P2 , da cui:
m3 = m1 + m2 = 3 Kg
Nella condizione finale, le equazioni diventano, tenendo conto del vincolo
cinematico:
T1 − P1 = m1 a 1y
T2 − P3 = m 3 a 3 y
T1 = T2 = T
a 1y = − a 3 y = a
da cui si ricava:
m − m1
a= 3
g = 2 m s-2
m 3 + m1
3
r
T1
r
T2
r
r
P1 + P2
r
P3
3.
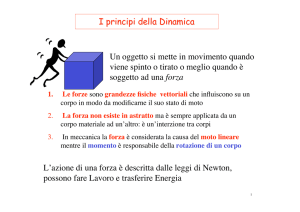
Una boccola di massa M scivola su un asse verticale in presenza di
attrito, descritto dal coefficiente di attrito cinematica µd. La forza
premente F può essere regolata agendo sulla vite laterale.
Determinare il valore di F, affinché la boccola scivoli a velocità
costante.
M = 2.2 Kg ; µd = 0.10
y
x
A velocità costante l’accelerazione è nulla, e l’equazione di Newton
diventa:
r
r r r
Fa + P + F + R = 0
R −F=0
Fa − P = 0
Fa = µ d R
da cui:
mg
P
F=
=
= 216 N
µd
µd
r
Fa
r
F
r
R
r
P
4.
Un corpo di massa m scivola su un piano orizzontale in presenza di attrito. Siano µs e µd i coefficienti di attrito
statico e dinamico rispettivamente.
a) Se il corpo si muove inizialmente alla velocità vo, determinare il tempo t che occorre perché esso si fermi.
b) Determinare la forza F che è necessario applicare per rimettere il corpo in movimento.
m = 1.4 Kg ; µs = 0.3 ; µd = 0.2 ; vo = 22 m s-1
La II equazione di Newton è nella fase iniziale:
r
r r
Fa + P + R = 0
− Fa = m a
R−P=0
Fa = µ d R
da cui:
µ P
a = − d = − 2 m s −2
m
La legge del moto uniformemente accelerato dà quindi:
v = vo + a t
da cui, imponendo v = 0 , si ricava:
v
t = − o = 11 s
a
Per rimettere in movimento il corpo è necessario vincere l’attrito di stacco,
ed applicare quindi una forza F = µs P = 4 N
r
R
r
Fa
r
P
5.
Un corpo di massa m scivola su un piano in presenza di attrito. Siano µs e µd i coefficienti di attrito statico e
dinamico rispettivamente.
a) Se il corpo è inizialmente fermo, si determini la minima forza F che permette di metterlo in movimento;
b) supponendo che tale forza continui a spingere il corpo, determinare la velocità v che esso acquisisce dopo un
tempo t.
m = 1.9 Kg ; µs = 0.30 ; µd = 0.15 ; t = 2.4 s
Un istante prima dello stacco, la II equazione di Newton è:
r r
r r
F + Fa + P + R = 0
F − Fa = 0
R−P=0
Fa = µ s R
da cui:
F = µ s P = 5.6 N
Immediatamente dopo lo stacco, invece:
r r
r r
r
F + Fa + P + R = m a
F − Fa = m a
R −P=0
Fa = µ d R
da cui si ricava:
F − µd P
= 1 .5 m s − 2
a=
m
La legge del moto uniformemente accelerato dà quindi:
v = a t = 3.5 m s-1
r
R
r
F
r
Fa
r
P
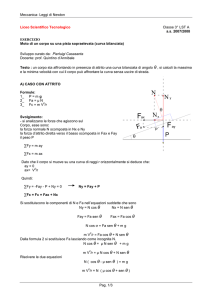
6. Una massa m1 è trascinata lungo un piano inclinato liscio da una
fune legata alla massa m2, come in figura. Determinare la tensione
della fune.
m1
m1 = 2.5 Kg ; m2 = 5 Kg ; θ = 30°
m2
θ
Conviene usare due sistemi di riferimento diversi per descrivere i due
punti materiali. Il riferimento indicato in figura è usato per la massa
m1; per la massa m2 si usa un asse y verticale. Le equazioni della
dinamica per i due punti materiali:
r
r
r
r
R 1 + T1 + P1 = m 1 a 1
r
r
r
T2 + P2 = m 2 a 2
si proiettano dando:
T1 − P1 senθ = m 1 a 1x
T2 − P2 = m 2 a 2 y
con i vincoli:
T1 = T2 = T
a 1x = − a 2 y = a
Risolvendo si ha:
m 2 − m 1senθ
g = 4.9 ms − 2
a = m + m
1
2
T = m 1 m 2 g (1 + senθ ) = 24.5 N
m1 + m 2
x
y
r
R1
r
T1
r
P1
r
T2
r
P2
7. Una massa m1 è trascinata lungo un piano inclinato liscio da una
fune legata alla massa m2, come in figura. Determinare
l’accelerazione delle masse.
m1
θ
m1 = 6 Kg ; m2 = 3 Kg ; θ = 30°
m2
Conviene usare due sistemi di riferimento diversi per descrivere i due
punti materiali. Il riferimento indicato in figura è usato per la massa
m1; per la massa m2 si usa un asse y verticale. Le equazioni della
dinamica per i due punti materiali:
r
r
r
r
R 1 + T1 + P1 = m 1 a 1
r
r
r
T2 + P2 = m 2 a 2
si proiettano dando:
T1 + P1 senθ = m1 a 1x
T2 − P2 = m 2 a 2 y
con i vincoli:
T1 = T2 = T
a 1x = − a 2 y = a
Risolvendo si ha:
m 2 + m 1senθ
a
g = 6.5 ms − 2
=
m1 + m 2
T = m1 m 2 g (1 − senθ ) = 9.8 N
m1 + m 2
y
x
r
R1
r
T1
r
P1
r
T2
r
P2
8.
Una sferetta di massa m ruota con velocità angolare costante ω. La
sferetta è trattenuta sulla traiettoria circolare da una molla che ha una
lunghezza a riposo l , e un coefficiente elastico k. Determinare il
raggio della circonferenza.
m = 120 g ; ω = 3.4 s-1 ; l = 12 cm ; k = 15 Nm-1
La II equazione della dinamica, proiettata in direzione centripeta, è in questo caso:
k ∆l = m a c = m ω 2 (l + ∆l )
da cui si ricava:
∆l =
m ω2
k − m ω2
l = 1.2 cm
9.
Una sferetta di massa m ruota con velocità angolare costante ω su una
circonferenza di raggio r. La sferetta è trattenuta sulla traiettoria
circolare da una molla che ha una lunghezza a riposo l . Determinare il
coefficiente elastico k della molla.
m = 230 g ; ω = 11 s-1 ; r = 8 cm ; l = 7 cm
La II equazione della dinamica, proiettata in direzione centripeta, è in questo caso:
k ∆l = m a c = m ω 2 r
con ∆l = r − l = 1 cm
da cui si ricava:
k=
m ω2 r
= 220 N m-1
∆l
10. Un pendolo conico ha massa m e lunghezza l . Nell’ipotesi che
esso ruoti a una velocità angolare ω, si determini:
a. la tensione T della fune;
b. l’angolo θ.
r
ω
θ
m = 100 g ; l = 1 m ; ω = 5 rad/s
m
r r
r r
r
Il pendolo è soggetto alle forze T , P . L’equazione del moto è T + P = ma . Proiettando su un asse
x orizzontale centripeto e y verticale, si ha:
T senθ = m ac = m ω2 r = m ω2 l senθ
T cosθ – P = 0
da cui:
T = m ω2 l = 2.5 N
P
= 0.39 ; θ = 67°
cosθ =
T
11. Un pendolo conico ha massa m e lunghezza l . Dato l’angolo θ, si
determini:
a. la tensione T della fune;
b. la velocità angolare ω.
r
ω
θ
m = 50 g ; l = 10cm ; θ = 10°
m
r r
r r
r
Il pendolo è soggetto alle forze T , P . L’equazione del moto è T + P = ma . Proiettando su un asse
x orizzontale centripeto e y verticale, si ha:
T senθ = m ac = m ω2 r = m ω2 l senθ
T cosθ – P = 0
da cui:
T
P
= 10 s-1
= 0.5 N ; ω =
T=
ml
cos θ
12. Un oggetto di massa m si trova nella regione di spazio prossima a
una stella doppia, sicché risente dell’azione combinata della
gravità dovuta alle masse M1 ed M2 . Determinare modulo,
r
direzione e verso del vettore forza Ftot sulla massa m.
M1 = 1030 Kg ; M2 = 1030 Kg ; m = 1019 Kg ;
G = 6,67 × 10-11 N m2 kg-2
y
m
M1
M2
x
Coordinate:
x1 = -108 Km
x2 = 108 Km
x=0
M1
M2
m
y1 = 0
y2 = 0
y = 108 Km
r
r
I moduli delle forze F1 e F2 valgono rispettivamente:
F1 = G
F2 = G
M1 m
r12
M2 m
= 3.3× 1022 N
( r1 = 1.4 × 108 Km )
= 3.3× 1022 N
( r2 = 1.4 × 108 Km )
r22
Per sommare le due forze si deve tenere conto delle differenti
r
r
direzioni di F1 e F2 . Conviene sommare i vettori per componenti:
π
F1x = -F1 cosθ = -3.3 × 1022 cos =
4
22
-2.4 × 10 N
π
F2x = F2 cosθ = 3.3 × 1022 cos =
4
22
2.4 × 10 N
Ftot x = 0
Infine, Ftot =
22
2
2
Ftot
x + Ftot y = 4.8 × 10 N
y
m
θ
M1
π
F1y = -F1 senθ = -3.3 × 1022 cos =
4
22
-2.4 × 10 N
π
F2y = -F2 senθ = -3.3 × 1022 cos =
4
22
-2.4 × 10 N
Ftot y = F1y + F2y = -4.8 × 1022 N
M2
x
13. Un oggetto di massa m si trova nella regione di spazio prossima a
una stella doppia, sicché risente dell’azione combinata della
gravità dovuta alle masse M1 ed M2 . Determinare il modulo del
r
vettore forza Ftot sulla massa m.
M1 = 1031 Kg ; M2 = 1030 Kg ; m = 1020 Kg ;
G = 6,67 × 10-11 N m2 kg-2
Coordinate:
M1
M2
m
x1 = -108 Km
x2 = 0
x = 108 Km
y
M2
F1 = G
F2 = G
r12
M2 m
y
M2
24
= 1.7 × 10 N
8
( r1 = 2 × 10 Km )
θ
23
8
= 3.3× 10 N ( r2 = 1.4 × 10 Km )
r22
Per sommare le due forze si deve tenere conto delle differenti
r
r
direzioni di F1 e F2 . Conviene sommare i vettori per componenti:
M1
F1x = -F1 = -1.7 × 1024 N
F1y = 0
π
F2x = -F2 cosθ = -3.3 × 1023 cos =
4
23
= -2.4 × 10 N
Ftot x = F1x + F2x = -1.9 × 1024 N
π
F2y = F2 senθ = 3.3 × 1023 cos =
4
23
= 2.4 × 10 N
Ftot y = F1y + F2y = 2.4 × 1023 N
Infine, Ftot =
x
y1 = 0
y2 = 108 Km
y= 0
r
r
I moduli delle forze F1 e F2 valgono rispettivamente:
M1 m
m
M1
24
2
2
Ftot
x + Ftot y = 1.9 × 10 N
m
x
14. Un’auto percorre una curva di raggio r a velocità v. Noto il coefficiente di attrito statico tra
ruote e l’asfalto µs, si determini il massimo valore possibile di decelerazione, prima che l’auto
sbandi.
m = 1000 Kg ; r = 50 m ; v = 15 m s-1 ; µs = 0.5
In questo problema l’unica forza che agisce sull’auto è la
forza di attrito statico col suolo. La seconda legge della
dinamica si scrive quindi:
r
r
Fa = m a
r
Come il vettore accelerazione, anche il vettore Fa ha sia una componente centripeta, che una
tangenziale. Proiettando l’equazione sugli assi del sistema tangente si trova quindi:
Ft = m a t
v2
Fc = m
r
Dalla seconda equazione si ricava il valore Fc = 4.5 × 103 N . D’altro canto, la massima forza di
attrito che l’asfalto può applicare vale:
Fmax = µs m g = 5 × 103 N
Il massimo valore che Ft può assumere è limitato dalla condizione che il modulo della forza di
attrito sia proprio uguale a Fmax. Quindi.
2
Ft2 + Fc2 = Fmax
Ft =
2
Fmax
− Fc2 = 2.2 × 103 N
da cui, infine:
F
a t = t = 2.2 m s −1
m
Si noti che: a) at è il modulo dell’accelerazione tangenziale; la componente tangenziale
dell’accelerazione è negativa; b) questo valore è molto minore di quello possibile in rettilineo, dato
F
da max = 5 m s −1
m