Corso di
Progettazione dei Sistemi di
Trasporto
I modelli di offerta
per i sistemi di trasporto
Prof. B. Montella
a. a. 2015/16
q
M = M(q)
σmax σamm
2
I modelli di offerta di trasporto
Sono modelli matematici che simulano gli aspetti rilevanti del funzionamento
di un sistema di offerta, costituito dalle componenti fisiche ed organizzative
finalizzate alla produzione dei servizi di trasporto di una determinata area.
Tali modelli utilizzano:
La teoria dei grafi e delle reti per la struttura topologica e funzionale del sistema;
I risultati di diverse discipline dell’ingegneria per descrivere le prestazioni e le
interazioni degli elementi che lo compongono.
3
4
5
6
Individuazione del sistema di trasporto
La delimitazione dell’area di studio;
La suddivisione dell’area in zone di traffico (zonizzazione);
La selezione (estrazione) delle infrastrutture e/o dei servizi di trasporto
rilevanti per il problema in esame (schema di base);
La costruzione del modello matematico dell’offerta di trasporto (rete);
La definizione delle componenti della domanda di mobilità rilevanti;
La definizione del modello di interazione domanda/offerta (assegnazione);
Il calcolo delle prestazioni del sistema e la rappresentazione dei risultati
della simulazione.
7
8
Definizione di rete di trasporto
Si
definisce rete un grafo ai cui archi è associata una
caratteristica quantitativa.
Si definisce grafo una coppia ordinata di due insiemi:
insieme N detto nodi;
insieme L di archi che rappresentano coppie di nodi appartenenti a N.
Si definiscono percorsi una sequenza ordinata di archi.
Ad archi e percorsi si associano due tipi di variabili: i costi e i flussi.
9
Costo generalizzato
Il costo generalizzato è una variabile che sintetizza il valore
medio delle diverse voci di costo sopportate dagli utenti così
come dal loro percepite nella effettuazione delle scelte di
trasporto.
cl tempo tl cos to cml comfort coml sicurezza sicl
CkADD cl al ,k cl
lk
C ADD AT c
l
C AT c C NA
10
Modello di offerta
cl f cl0 cv f
C AT c C NA
Funzione di costo
separabile
cl f cl f l
C F AT c AF C NA
f AF
11
Classificazioni delle reti e dei relativi elementi
Reti sincroniche e reti diacroniche;
Nodi reali, nodi fittizi e nodi centroidi;
Archi reali, archi fittizi e archi connettori;
Servizi continui e simultanei vs servizi
discontinui e non contemporanei
12
13
E
O
S
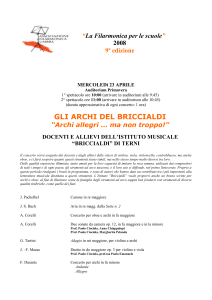
Grafi rappresentativi di una intersezione stradale a 4 braccia
Rappresentazione con un nodo
Rappresentazione d
1
N
1
2
2
3
5
S
4
Rappresentazione con un nodo
O
1
E
2
4
Rappresentazione dettagliata
1
3
2
3
5
S
Fonte: Cascetta (2006)
4
4
14
Archi pedonali
Ll
c P
V
P
l
15
Il costo di trasporto di un arco stradale
cl f running trl f waiting twl f costo cml f ...
?
?
16
Archi autostradali
Ll Ll f l
Ll
trl f l
Vo
Vc Vo Capl
Vo = 110 km/h
Vc = 60 km/h
Capu = 1800 veic/h
=3
=1
Capl Ncorl Capu
3,0
4
L=1 km;
V 0 =110 km/h;
Vc=60km/h
2,5
3
2,0
t (min).
Valori di esempio
1,5
2
1,0
0,5
0,0
0,1
0,3
0,5
0,7
f/Cap
0,9
1,1
1,3
1,5
17
Archi extraurbani
Doppia Carreggiata
Ll Ll f l
Ll
trl f l
Vo
V
V
Cap
c
o
l
Carreggiata Unica
Ll Ll f l f l*
Ll
trl ( f l , f l* )
Vo
Vc Vo Capll*
Vo (km/h) 56,6 3,2 Lu 4,5 Lo 2,4 P 9,6 T 5,4 D
Valori di esempio
Valori di esempio
Vc = 50 km/h
Vc = 40-45 km/h
Cap = 3000 veic/h
Capll* = 2000-2600 veic/h
=3
=3
=1
=1
18
Archi per barriere di pedaggio
Ritardo deterministico
f l Capl T
fl
T
Ts
tw l Ts
1
Capl 2
Capl 2
d
Veicoli
Cumulata
degli arrivi
Coda al
tempo T
f
Cap
Cumulata
delle partenze
0
T
tempo
19
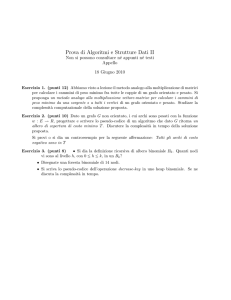
Archi per barriere di pedaggio
Ritardo stocastico
f
1
twul ( f l ) Ts (Ts2 s2 ) l
per f l α Capl
2 1 f l /Capl
twl f l twl α Capl
d
twl f f αCap f l α Capl
l
df
per f l α Capl
250
Ts=6s
Cap=0.15 v/s
Capl N cas Ts
Tempo di attesa (s)
200
s 2 =36s
150
100
s 2 =6s
50
0
0
0.02
0.04
0.06
0.08
Flusso (v/s)
0.1
0.12
0.14
0.16
20
Fonte: Cascetta (1998)
Archi per barriere di pedaggio
Ritardo combinato deterministico/stocastico
1/ 2
2
f
f
f
4
f
/
Cap
T
l
l
twl f l Ts Ts2 2 l l 1 l 1
2 4 Capl
Capl T
Cap
twd(f)
tw
tw(f)
twu(f)
Ts = ritardo
deterministico di
sottosaturazione
0
Cap
f
21
Archi stradali urbani
Tempo di running
Ll
trl ( f l )
Vl ( f l )
Vl ( f l ) 31,1 2,8 Lul 1,2 Pl 12,8 Tl 2 10,4 Dl 1,4 INT
fl
0,000053 0,000123 X
Lul
2
22
Archi stradali urbani
Tempo di waiting – intersezioni semaforizzate (1/3)
veic/s
Flusso di saturazione S
S
tempo
Verde
Tempo perso
in avvio
Verde efficace
Giallo
Rosso
Tempo perso
in frenatura
Rosso efficace
Cap S
G Tc
23
Archi stradali urbani
Tempo di waiting – intersezioni semaforizzate (2/3)
Doherty
fl
1
0,55
2
twl f l Tc 1 l
2
l Sl l Sl f l
twl f l twl l S l
d
twl f
df
f S
f l l S l
f l l S l
f l l S
Akcelik
0,5Tc 1 l
twl ( f l )
1 l xl
twl ( f l )
0,5Tc 1 l
1 l xl
2
xl 0,50
2
1/ 2
8 xl 0,5
2
900 T xl 1 xl 1
0,50 xl 1
l SlT
1/ 2
8 xl 0,5
2
twl ( f l ) 0,5Tc 1 l 900 T xl 1 xl 1
S
T
l l
xl 1
24
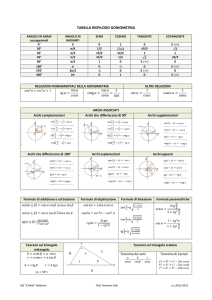
Archi stradali urbani
Tempo di waiting – intersezioni semaforizzate (3/3)
350
G = 60”
T c = 120”
S = 3600 veic/h = 1 veic/sec
G/T c = 0.5
= 0.95
Cap = 1800 veic/h = 0.5 veic/sec
Tempo (sec) f
300
250
200
Doherty
Akcelik
150
100
Doherty
approssimazione
lineare
50
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
Flusso/Cap
S 525 Lu K1 K 2 K n
25
W
11
6
12
5
E
4
Archi stradali urbani
321
Tempo di waiting – intersezioni non semaforizzate
S
N
Manovre
Direzione Sud-Nord, svolta a destra
Direzione Sud-Nord, attraversamento
Direzione Sud-Nord, svolta a sinistra
789
W
10
11
12
6
5
1
2
3
Flussi che influenzano il ritardo
1,2,3,5,9
2,3,5,6,9,10,11,12,1
3,5,6,7,8,11,12,1,2
E
4
Manovre
e Sud-Nord, svolta a destra
e Sud-Nord, attraversamento
e Sud-Nord, svolta a sinistra
321
S
1
2
3
twl f exp 0,2664 0,3967 ln f conf 3,959 A ln f conf 6,92
f conf f i
flusso totale in conflitto
Flussi che influenzano
il ritardo
i
1,2,3,5,9
2,3,5,6,9,10,11,12,1
1 se f conf 1062 veic/h
3,5,6,7,8,11,12,1,2
A
0 se f conf 1062 veic/h
26
Trasporto collettivo
27
I grafi dei servizi
• continui e simultanei (trasp. Privato e rete
pedonale)
• discontinui e non contemporanei (trasp.
Collettivo).
28
I servizi discontinui e non simultanei
Sono accessibili solo in alcuni punti e sono disponibili solo in alcuni
istanti.
Esempi di questo tipo sono i servizi di linea (autobus, treni, aerei,
navi) che possono essere utilizzati solo fra terminali (fermate,
stazioni, aeroporti, porti) e sono disponibili solo ad alcuni istanti
(orari di partenza).
I servizi di linea possono essere rappresentati con dei grafi di tipo
diverso a secondo delle caratteristiche del servizio offerto e delle
ipotesi che si fanno sui comportamenti di scelta del percorso.
29
Servizi (offerti) di trasporto collettivo
Servizi a frequenza elevata (ad esempio con
passaggi ogni 5-15 minuti) e bassa regolarità
Grafo delle linee
Servizi a bassa frequenza ed elevata regolarità
Grafo delle corse (o diacronico)
30
Grafo delle linee (1/2)
Linea trasporto collettivo
Salita
Discesa
Attesa
Rete Pedonale
31
Grafo delle linee (2/2)
Linea 1
Linea 2
Salita
Discesa
Attesa
Rete Pedonale
32
Grafo delle corse (1/2)
domanda
Segmentazione temporale della domanda
t D1
t D3
t Dn
intervalli temporali
ampiezza intervallo
Centroide temporale
33
Grafo delle corse (2/3)
Corse
Istanti di
partenza
Centroidi
temporali
34
Grafo delle corse (3/3)
centroide
centroide
Centroidi temporali
Centroidi temporali
tempo
spazio
Istante di partenza
Istante di arrivo alla
fermata
accesso/egresso
Istante di arrivo
Arco di accesso/egresso
Arco di salita/discesa
Arco di corsa/attesa
35
Funzioni di costo
Tempo a bordo (Linee+Corse)
Ll
tb
vl bus, auto
36
Funzioni di costo
Tempo di attesa (Linee)
LINEA CON ARRIVI REGOLARI
twi
Singola Linea
tw
t
7:00
Insieme di linee
tw
7:10
E[twi]= tw=10’/2=5’
7:20
1/=10’
LINEA CON ARRIVI CASUALI
i
i
t
7:00
7:03
E[twi]= tw=10’
Singola Linea
con coda
fb f w
t w
Cap
7:20
1/=10’
Istante di arrivo di un autobus alla fermata
Istante di arrivo di un utente alla fermata
Fonte: Cascetta (2006)
37
Funzioni di costo
Tempo di accesso/egresso (Linee+Corse)
ta / e
Ll
vl
38
Funzioni di costo
Tempo di sosta alla fermata (Linee+Corse)
f saliti f discesi
t sosta 1 2
Cap
39
Modelli di scelta del percorso
• Servizi a frequenza elevata e bassa regolarità
Approccio a linee Ipercammini
• Servizi a bassa frequenza ed elevata
regolarità
Approccio a corse Percorsi
40
Modello di scelta del percorso/assegnazione
Modello di offerta
Modello di domanda
Modello di assegnazione
C F AT c AF C NA
F P C d
F * P AT c AF * C NA d
f * AF *
41
Modello di domanda
(Scelta del percorso)
U i Vi i
Pk PrU k U h
Vi Ci
h k
Pk PrVk k Vh h
PrVk Vh h k
h k
h k
42
Definizione dei costi
Approccio a linee
In questo caso non è possibile definire i percorsi
ma solo una strategia di viaggio (ipercammino)
Comportamento preventivo/adattivo
43
Probabilità di diversione
In ipotesi di arrivo degli utenti e dei veicoli alle
fermate completamente casuale (processi di
Poisson con probabilità uniforme di arrivare in
qualunque istante), la probabilità di salire sulla
linea i appartenente all’insieme delle linee
attrattive è pari a:
i
Pr i
j
j
44
Rete di linee di trasporto collettivo
(esempio di ipercammini)
A
linea 1 =5/h
D
C
B
linea 2 =10/h
E
G
linea 3 =6/h
linea 4 =12/h
linea 5 =4/h
H
F
linea 6 =6/h
Fonte: Cascetta (1998)
45
5 IPERCAMMINI SEMPLICI
a, b, c, d, e;
4 IPERCAMMINI COMPOSTI
a+b, a+c, b+c, a+b+c;
probabilità di diversione
w tempo di attesa all’ arco di salita
W tempo di attesa totale
qk probabilità di scelta del percorso k
ipercammino semplice b (2)
Fonte: Cascetta (1998)
ipercammino semplice a (1)
W=10,0
w=10,0
ipercammino semplice c (3)
W=20,0
w=5,0
W=15,0
w=5,0
w=15,0
w=12,0
w=10,0
w=6,0
W=18,0
ipercammino semplice d (4)
w=12,0
w=6,0
W=18,0
ipercammino semplice e (5)
46
Fonte: Cascetta (1998)
ipercammino composto a+b (6)
qa = 0,33
qb = 0,67
w=3,3
W=13,3
qa = 0,33
qc = 0,67
w=3,3
W=10,0
=0,33
=0,33
=0,67
ipercammino composto a+c (7)
=0,67
w=15,0
=1,0
w=10,0
ipercammino composto b+c (8)
qb = 0,40
qc = 0,60
w=5,0
=1,00
w=6,0
=1,0
r
s
ipercammino composto a+b+c (9)
qa = 0,33
qb = 0,27
qc = 0,40
W=11,0
w=3,3
W= 7,3
=0,33
=0,4
=0,67
=0,4
r
=0,6
w=6,0
=0,6
s
47
Probabilità di diversione 2
Ad ogni nodo i posso attribuire una probabilità
di diversione pari a:
l ,h
l
j
j
1
0
se l h ed è di salita
se l h e non è di salita
se l h
48
Probabilità varie
La probabilità di seguire un percorso k all’interno dell’ipercammino
h è:
qk ,h 0
qk ,h l ,h
se k h
qh ,h 1
lk
La probabilità di attraversare un arco l dell’ipercammino h è pari
alla somma delle probabilità di seguire uno dei percorsi k
appartenenti all’ipercammino h, ossia:
bl ,h
k :lk
qk ,h al ,k qk ,h
k
49
Costi di ipercammino
Gh GhADD GhNA
GhADD bordo Tbordo salita Tsalita discesa Tdiscesa piedi Tpiedi
GhNA attesa Tattesa trasbordi N trasbordi
GhADD qk ,h CkADD bl ,h cl
k
l
Tattesa qk ,h wl ,h bl ,h wl ,h
kh
lk
l
j
jh
wl ,h
0
se l è arco di diversione
altrimenti
50
Probabilità di scelta dell’ipercammino
PH h PrU h U h'
h' h
Pr Gh h Gh' h'
h' h
La probabilità di scelta di un determinato percorso allora è:
pk / osdm qk ,h PH h
h
51
Approccio diacronico
Nell’approccio diacronico la probabilità di
scelta del percorso si calcola in maniera
tradizionale. In questo caso è necessario
introdurre una penalità relativa all’anticipo o al
ritardo della partenza.
52