Carrello segui traccia a guida ottica “O.S.CAR.” (Carrello sistema ottico)
1. Sintesi
I rifornimenti di merce nei negozi di genere alimentari, nei magazzini delle aziende di
produzione, sono momenti importanti del processo di lavoro, questi in genere sono fatti
manualmente con dei carrelli motorizzati a guida umana.
L’idea di proporre alla classe 4 A elettronica dell’ITIS Franchetti di Città di Castello una
soluzione automatizzata è venuta proprio per rendere il problema più agevole.
Il progetto che può essere adottato per realizzare tanti carrelli “O.S.CAR.” da chiunque abbia la
necessità, sarà adottato anche dall’ITIS Franchetti per la raccolta dei cestini della carta dalle
aule o per portare le circolari nelle classi. Pertanto si tratterebbe di una innovazione radicale
che consentirebbe l’automazione di vari e importanti servizi.
2. Prodotto/servizio
Il prodotto che si desidera realizzare, è un carrello motorizzato a movimentazione con sistemi
cablati il quale automaticamente dopo l’avvio che può avvenire con un pulsante, o un
telecomando segue una pista disegnata per terra (un nastro nero) a mo’ di una monorotaia
seguendone il percorso, eventuali correzioni possono essere fatte sempre attraverso il
telecomando. Il carrello in questione arresta la sua marcia quando incontra sulla pista un codice
a barre per consentire l’eventuale carico o scarico delle merce dal carrello; a questo arresto
deve seguire per una nuova partenza, un impulso con telecomando o pulsante. Durante la
marcia si ferma se incontra un ostacolo, ripartendo automaticamente appena si libera la pista. Il
carrello è alimentato da 2 batterie a 12 Volt (tipo autovettura) la cui carica viene monitorata,
segnalando la condizione di batteria scarica.
Questo progetto a logica cablata, prevede l’integrazione con sistemi programmabili che
consentono al carrello di decidere il percorso, le fermate da effettuare e la autoricarica in caso
di batterie scariche.
3. Innovatività
Di trovati simili non abbiamo conoscenza diretta, tuttavia sembra che esistano nelle aziende più
avanzate come FIAT e simili, certamente questi prodotti saranno la massima espressione di
tecnologia e di funzionalità, ma non avendo conoscenza diretta non possiamo esprimere un
parere tecnico sui presunti punti deboli che questi se ci sono, possano avere.
Il nostro carrello automatico segui traccia, non derivando da un’idea da noi già vista è
sicuramente per noi originale e pensiamo che non ha paragoni nel mercato.
Il carrello da noi ideato può automatizzare con sistemi automatici di carico e scarico il
rifornimento di magazzini, infatti è in grado di percorrere i corridoi dei magazzini fermandosi
difronte agli appositi scaffali merce per rifornirli della merce esaurita in quel settore. Un
elevazione eventuale del piano può consentire verticalmente, rifornimenti anche a piani diversi
nel settore del corridoio considerato. Oltre a rifornire il magazzino può essere utilmente
utilizzato per rifornire i vari reparti della merce occorrente presente nel magazzino. Il sistema
da noi realizzato nel presente anno scolastico, è semiautomatico in quanto utilizza solo
tecnologia cablata, tuttavia inserendo codici a barre luminosi nelle varie stazioni, si può
programmare le stazioni di fermata nei corridoi secondo le esigenze del magazzino e dei
reparti, l’alimentazione è a batterie tipo autovettura e lo stato di carica monitorato. Prevedendo
nel prossimo anno lo sviluppo del sistema di controllo a microprocessore il carrello in
questione sarà dotato di una memoria con tutti codici merce e gli indirizzi degli scaffali dove la
merce è posizionata. Lo stato di carica delle batterie utilizzate alla movimentazione oltre ad
1
essere monitorata, consente al carrello ad una determinata ora di spostarsi presso una stazione
di ricarica per essere ricaricato automaticamente.
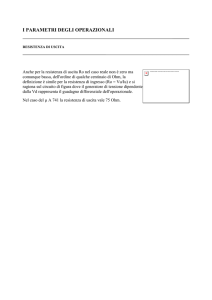
La versione progettata nel corso di quest’anno consta di quattro circuiti fondamentali inseriti in
due circuiti stampati o board.
Primo circuito stampato per comando locomozione
1) circuito di marcia / arresto (locomozione carrello) mediante pulsanti e telecomando ed
arresto per ostacolo sul percorso (tavola 1)
2) circuito per il rilevamento tramite codice a barre della stazione di fermata (tavola 2)
Secondo circuito stampato per controllo direzione (sterzo) + controllo carica batterie
3) circuito differenziale per seguire la traccia (nastro adesivo nero) sul pavimento (tavola 3)
4) circuito per la monitorizzazione della carica delle batterie. (tavola 4)
2
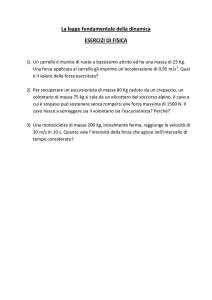
La tavola 1 è il circuito utilizzato per la locomozione del carrello, utilizza un classico schema di
flip-flop tipo SET – RESET con logica Nand i cui azionamenti provengono da due pulsanti oppure
dalla saturazione di due transistor la cui base raccoglie impulsi di un radio comando. L’uscita del
suddetto flip – flop pilota un transistor che tramite un relè a due scambi da corrente al motore di
trazione del carrello. Una fotocellula ricetrasmittente controlla il percorso verificando alla distanza
di 50 cm. la presenza di eventuali ostacoli, nel caso si verifichi l’ingombro del percorso il carrello si
ferma istantaneamente riprendendo movimento solo dopo essersi liberato il percorso.
La tavola 2 è il circuito che riconosce il codice a barre che nel nostro caso è composto da tre segni
bianchi sul nastro isolante nero che indica il percorso posti a circa 1 cm l’uno dall’altro.
Il riconoscimento del codice a barre per le fermate è fatto tramite un fototransistor che al passaggio
sopra la barra bianca attiva un contatore modulo 3 contemporaneamente ad un tymer di 10 secondi,
l’uscita del tymer e del contatore attivano tramite una porta AND un transistor che resetta il flip –
flop fermando la marcia del carrello se lungo il percorso, accidentalmente ci fossero più macchie
bianche il contatore ed il tymer si attivano ma solo se le macchie sono tre ed in rapida successione il
circuito riconosce la stazione e resetta il circuito altrimenti qualsiasi sporcizia che potrà incontrare
sarà ignorata.
La tavola 3 è il circuito che riconosce il tracciato realizzato dal nastro isolante nero sul pavimento a
mo’ di monorotaia. Due fotodiodi posti ai lati destro e sinistro della ruota anteriore motrice rileva le
curve sul pavimento del nastro che indica al carrello lo sterzo da muovere.
98
I fotodiodi polarizzati inversamente attraverso le rispettive resistenze abbassano la loro soglia di
conduzione quando illuminati, pertanto quando uno dei fotodiodi va sopra al nastro nero della pista,
perché c’è una curva, la tensione ai suoi capi si abbassa mentre l’altro fotodiodo mantiene alta la
sua soglia e quindi la sua tensione. Le due tensioni, rilevate ai capi dei fotodiodi quindi
rappresentano un differenziale di tensione in analogia al differenziale di luce che si può creare
durante il percorso quando si incontrano curve. Le due tensioni ai capi dei due fotodiodi vengono
messi all’ingresso di un amplificatore differenziale, nella cui uscita si avrà la differenza amplificata
dei segnali posti in ingresso potremmo così avere una tensione di uscita uguale a 0 Volt quando i
fotodiodi sono perfettamente a cavallo della pista (nastro nero) avendo entrambi la stessa
luminosità. Quando si incontra una curva a destra avremo un differenziale di luce e quindi di
tensione l’uscita avrà un valore di saturazione + o - ad esempio + 15 volt, in questa situazione visto
che l’uscita dell’amplificatore differenziale collega l’ingresso di un amplificatore tipo PUSH-PULL
simmetria complementare il transistor BDX 33 NPN va in conduzione facendo circolare una
3
corrente tale da far ruotare lo sterzo del motore verso destra, arrestandosi quando termina il
differenziale di luce che evidentemente sarà quando i fotodiodi sono tornati a cavallo della
monorotaia (nastro adesivo nero) Quando si incontra una curva a sinistra avremo un differenziale
di luce e quindi di tensione l’uscita avrà un valore di saturazione in questo caso -15 volt, in questa
situazione visto che l’uscita dell’amplificatore differenziale collega l’ingresso dello stesso
amplificatore tipo PUSH-PULL simmetria complementare questa volta il transistor BDX 34 PNP
va in conduzione facendo circolare una corrente contraria a quella descritta prima, tale da far
ruotare lo sterzo del motore verso sinistra, arrestandosi quando termina il differenziale di luce che
evidentemente sarà quando i fotodiodi sono tornati a cavallo della monorotaia (nastro adesivo nero)
in realtà se le curve non sono nette 90 gradi o più i due fotodiodi rimarranno sempre più o meno a
cavallo della “monorotaia”.
La tavola 4 è il circuito che monitorizza lo stato di carica delle due batterie la tensione delle batterie
è controllata tramite un partitore di tensione la cui tensione varia a seconda della carica delle
batterie questa viene comparata ad un riferimento di tensione (zener) mediante il comparatore
LM311 , appena la tensione scende , il comparatore manda la sua uscita bassa, accendendo il diodo
led (segnalazione batteria scarica) e preparando un segnale pulito (optoisolato) su un morsetto
libero che sarà utilizzato con logica programmabile per potersi andare a ricaricare autonomamente
ed automaticamente.
4