Consigli per la risoluzione dei problemi
• Individuare il punto o i punti materiali di cui si vuole studiare il moto
• Introdurre un sistema di riferimento inerziale
• Individuare tutte le forze agenti sul punto materiale o sui punti materiali
– Ricercare i corpi dell’ambiente circostante che possono esercitare
forze
• Tener presente che alcune forze agiscono a distanza
• Altre agiscono per contatto
– Attenzione ai corpi a contatto
• Costruirsi il diagramma del corpo libero
• Scrivere la seconda legge in forma vettoriale
• Ottenere le tre equazioni scalari corrispondenti
– Attenzione alla scelta delle direzioni su cui proiettare
G.M. - Informatica B-Automazione 2002/03
Consigli per la risoluzione dei problemi
• Utilizzare tutte le ulteriori condizioni presenti nel problema
se due corpi sono connessi da una corda ideale, di lunghezza costante,
è possibile scrivere delle relazioni tra i loro spostamenti e quindi tra le
loro velocità e le loro accelerazioni.
Se un corpo è fermo (x,y e z costanti), tutte e tre le componenti
dell’accelerazione sono nulle.
In alcuni casi solo alcune delle coordinate del punto materiale sono
costanti, ne deriva le corrispondenti componenti dell’accelerazione
sono nulle.
• Se la traiettoria percorsa è curva, cioè non rettilinea, allora la
componente normale dell’accelerazione vale
(v=modulo della
velocità, r raggio di curvatura della traiettoria).
Alcune delle forze possono avere lo stesso modulo:
v2
an
r
– .Coppia di forze di azione e reazione, in base alla terza legge.
– .Forze esercitate su oggetti diversi dallo stesso tratto di corda.
Etc.
G.M. - Informatica B-Automazione 2002/03
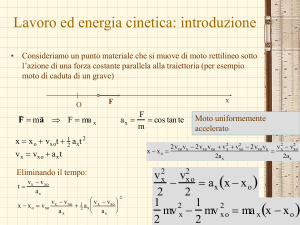
Consigli per la risoluzione dei problemi
• Determinare le componenti dell’accelerazione
• Dedurre dall’accelerazione trovata il moto del punto materiale.
– Accelerazione costante: moto uniformemente accelerato
– Proporzionale all’opposto della velocità: moto smorzato
– Proporzionale all’opposto della posizione:moto armonico
• Scrivere le leggi orarie tenendo conto delle condizioni iniziali
• Determinare le eventuali forze mancanti.
G.M. - Informatica B-Automazione 2002/03
Si consideri un corpo di massa m appoggiato su un piano inclinato rispetto
al piano orizzontale con inclinazione variabile con continuità da zero a 90°.
Sperimentalmente si osserva che quando l'angolo raggiunge il valore
qs=30° il corpo inizia a muoversi.
Se, una volta che il corpo di massa m si è messo in moto, si mantiene
costante l'angolo al valore qs=30°, si osserva che il corpo si muove di moto
rettilineo uniformemente accelerato.
Se, invece, subito dopo aver messo in moto il corpo, l'inclinazione viene
rapidamente diminuita e portata al valore qd=25°, il moto risulta essere
rettilineo uniforme.
Determinare i valori dei coefficienti di attrito statico e dinamico ms e md tra
il piano inclinato e il corpo di massa m e l’accelerazione nel caso in cui
l’inclinazione del piano viene mantenuta uguale a qs=30°.
Applica
zione
m
q
G.M. - Informatica B-Automazione 2002/03
Innanzitutto introduciamo un sistema di riferimento inerziale.
Conviene prendere l’asse y perpendicolare al piano inclinato e l’asse x
parallelo al piano in modo che il piano xy sia verticale
Fissiamo l’origine nella posizione iniziale del punto materiale.
y
Determiniamo le forze agenti
• La forza peso
• La reazione vincolare esercitata dal piano
inclinato
• Componente Normale
• Forza di attrito
Applica
zione
N
Fa
s
P
Possiamo anche predire la direzione e il verso
della forza di attrito:
• È opposta alla componente della forza
peso parallela al piano
x
y
N
Costruiamo il diagramma del corpo libero
Fa
P
Scriviamo la seconda legge di Newton
P N Fa ma
x
G.M. - Informatica B-Automazione 2002/03
P N Fas ma
Scriviamo la seconda legge di Newton
Applica
zione
Troviamo le equazioni scalari proiettando
sugli assi coordinati.
x
mg sen q Fa ma x
y
N mg cosq ma y
z
0 ma z
y
Fa
s
ax 0
Per q < qs il corpo rimane fermo:
q qs
Si ottiene:
ax 0
Fa Fsmax
max
Fa
N
max
Fs
mg senqs
ay 0
P
q
x
m sN
N mg cosqs
Fa
mg senq s sen qs
ms
tan qs
N
mg cos q s cos qs
max
G.M. - Informatica B-Automazione 2002/03
Se l’angolo viene mantenuto a qs
P N Fad ma
Troviamo le equazioni scalari proiettando
sugli assi coordinati.
x
mg sen q Fad ma x
y
N mg cos q ma y
z
0 ma z
Durante il moto il corpo rimane sempre
appoggiato al piano inclinato
y(t) 0
vy a y 0
y
Fad m d N
Applica
zione
N
Fa
s
Si ottiene:
P
N mg cosqs
Fad md N md mg cosqs
q
mg senqs Fad mg senq s m c mg cos qs
ax
gsenq s m c cos qs
m
m
L’accelerazione è costante: il moto sarà uniformemente accelerato
1
1
2
x(t) x o vxo t a xt 2
x(t) g(senq md cos q)t
2
2
xo 0
v xo 0
a x gsenq
Se il piano è liscio, m =0
d
x
1
2
x(t) gsen qt
G.M. - Informatica B-Automazione
2 2002/03
Se l’angolo viene ridotto a qc
P N Fad ma
Applica
zione
Troviamo le equazioni scalari proiettando
sugli assi coordinati.
x
mg sen q Fad ma x
y
N mg cos q ma y
z
0 ma z
Per q = qc il corpo si muove lungo a 0
x
l’asse x a velocità costante
ax 0
Fad m d N
q qc
Fa Fad
Si ottiene:
Fad mg senqc
y
N
Fad
ay 0
P
q
x
N mg cosqc
Fad mg senqc sen qc
md
tan q c
N mg cos qc cos qc
G.M. - Informatica B-Automazione 2002/03
Un punto materiale di massa m=1 kg può muoversi lungo una guida
orizzontale rettilinea priva di attrito. Il corpo è attaccato ad una molla di
costante elastica k=400 N/m, il secondo estremo della molla è connesso ad
una parete verticale, come mostrato in figura.
Inizialmente il corpo viene spostato in maniera da allungare la molla di un
tratto di 10 cm e lasciato da questa posizione con velocità nulla.
Determinare la legge oraria, mostrare che il moto è periodico e
determinarne il periodo.
Innanzitutto introduciamo un sistema di riferimento inerziale.
• Conviene prendere l’asse y verticale e l’asse x
orizzontale coincidente con l’asse della molla
• Scegliamo l’origine nella posizione in cui si trova il
punto materiale quando la molla non è deformata
• Questo semplifica l’espressione della forza
elastica
Felx kx
Determiniamo le forze agenti
• La forza peso
• La forza elastica
• La reazione vincolare esercitata dal piano inclinato
• solo la Componente Normale
Applica
zione
Fel
asse y
Fel
O x
N
N
asse x
P
G.M. - Informatica B-Automazione 2002/03
Scriviamo la seconda legge di Newton
P N Fel ma
Applica
zione
Troviamo le equazioni scalari proiettando
sugli assi coordinati.
x
Felx ma x
y
N mg ma y
z
0 ma z
Fel
Durante il moto il corpo rimane sempre
appoggiato al piano orizzontale
L’accelerazione lungo l’asse x vale:
O x
y(t) 0
k
ax x
m
L’accelerazione è proporzionale all’opposto della
posizione: il moto è un moto armonico.
x A cos( pt )
p
asse y
Felx kx
k
m
N
N
asse x
P
vy a y 0
N mg
d 2x
k
x
2
dt
m
A e vanno determinate sulla base delle
condizioni iniziali.
G.M. - Informatica B-Automazione 2002/03
x A cos( pt )
p
v x A p sen( p t )
Le condizioni iniziali:
x o Acos o
0 A p seno
dalla seconda
k A e vanno determinate sulla
base delle condizioni iniziali.
m
x o 10cm 0.1m
v xo 0 m / s
o1 0
Applica
zione
asse y
Fel
o2
O x
N
N
asse x
P
La soluzione =0 è l’unica che da
un’ampiezza positiva, pari a A=0.1 m.
p
k
m
400
20s 1
1
Pulsazione angolare
x 0.1m cos(20t)
Legge oraria
G.M. - Informatica B-Automazione 2002/03
Un disco di massa m sta al di sopra di un tavolo orizzontale privo di attrito
ed è collegato con una massa M appesa ad una fune che passa attraverso un
foro al centro del tavolo, come illustrato in figura. Si determini la velocità
del disco lungo la circonferenza di raggio r in grado di mantenere fermo il
cilindro. Si assuma m=0.5 kg, M=0.3 kg, r=50 cm.
Applica
zione
Innanzitutto poniamoci nel sistema di riferimento del Laboratorio
(inerziale) per poter applicare le leggi di Newton.
Determiniamo le forze agenti su ciascuno dei
corpi
Corpo di massa m
• La forza peso
• La tensione della fune
• La reazione vincolare esercitata dal
piano
• solo la Componente Normale
Corpo di massa M
• La forza peso
• La tensione della fune
Il diagramma del corpo libero
v
r
T1
N
m
P1
T2
M
P2
G.M. - Informatica B-Automazione 2002/03
Scriviamo la seconda legge di Newton per i due corpi.
P1 N T1 ma1
Applica
zione
P2 T2 Ma2
Troviamo le tre equazioni scalari corrispondenti all’equazione
vettoriale.
Non siamo tenuti a scegliere gli assi coordinati: qualunque
direzione noi scegliamo, la relazione tra le componenti lungo la
direzione fissata deve essre simile all’equazione vettoriale.
Nel caso del corpo di massa m conviene utilizzare le seguenti
direzioni mutuamente perpendicolari:
2
v
r
T1
N
m
P1
ut
ut
v
T1 ma n m
r
0 ma t
j
N mg ma 1y
un
j
un
Per il corpo di massa M l’unica equazione non
banale è quella lungo l’asse verticale y:
y:
T2 Mg Ma2 y
v
M
gr
m
a2 y 0
T2 Mg
a1y 0
T2 T1
0.3kg
m
m
m
9.81 2 0.5m 2.93 1.71
0.5kg
s
s
s
N mg
v2
Mg m
r
G.M. - Informatica B-Automazione 2002/03
Un’automobile di massa m=1000 kg percorre una curva piana di raggio
costante r=80 m con una velocità costante di 60 km/h. Determinare il
minimo coefficiente di attrito statico tra asfalto e ruote dell’automobile
necessario perché l’automobile si mantenga la traiettoria curva.
Applica
zione
Poniamoci nel sistema di riferimento
del Laboratorio (inerziale) per poter
applicare le leggi di Newton.
Determiniamo le forze agenti
sull’automobile
• La forza peso
• La reazione vincolare esercitata
dalla strada
• La Componente Normale
• La forza di attrito (statico)
• La parte di ruota a
contatto con la strada è
ferma rispetto alla strada.
Il diagramma del corpo libero
G.M. - Informatica B-Automazione 2002/03
Scriviamo la seconda legge di Newton per l’automobile.
Applica
zione
P N Fs ma
Troviamo le tre equazioni scalari corrispondenti all’equazione vettoriale.
Come nel caso precedente utilizziamo le seguenti direzioni mutuamente
2
perpendicolari:
v
Fsn ma n m
un
v
r
N
u j
ut
Fst ma t
m
r
u
F
P
j
N mg ma y
t
n
s
at 0
Poiché il modulo della velocità è costante
Poiché l’automobile rimane attaccata alla strada a y 0
Fst 0
N mg
La forza di attrito statica necessaria a mantenere
v2
Fs Fsn ma n m
l’automobile in traiettoria è:
r
La forza di attrito statico è limitata
superiormente
Da cui ricaviamo
60 1000m 100 m
m
v
16.7
3600s
6 s
s
ms
2
Fs m sN
16.72 m
v2
m ms N m smg
r
2
v
s2
rg 80m 9.81 m
.35
s2
G.M. - Informatica B-Automazione 2002/03
Un’automobile di massa m=1000 kg percorre una curva di raggio costante
r=80 m con una velocità di 60 km/h. Determinare l’angolo di cui deve
essere sopraelevato l’esterno della curva rispetto all’interno perché
l’automobile si mantenga sulla traiettoria curva senza far ricorso alla forza
di attrito.
Applica
zione
V
Poniamoci nel sistema di riferimento del
Laboratorio (inerziale) per poter applicare le
leggi di Newton.
N
ut
j
un
q
Determiniamo le forze agenti
sull’automobile
• La forza peso
• La reazione vincolare esercitata
dalla strada
• Solo la Componente
Normale
P
Il diagramma del corpo libero
Scriviamo la seconda legge di Newton per
l’automobile.
P N ma
Troviamo le tre equazioni scalari corrispondenti all’equazione vettoriale. Come nei
casi precedenti utilizziamo le seguenti direzioni mutuamente perpendicolari:
2
un
ut
j
v
N sen q ma n v m
N r
0 ma t r Fs m
P
N cos q mg ma y
ut
j
un
G.M. - Informatica B-Automazione 2002/03
2
ut
v
N sen q ma n m
r
0 ma t
j
N cos q mg ma y
un
Applica
zione
Poiché l’automobile si muove su una traiettoria a y 0
mg
orizzontale
N cos q mg N
cos q
L’accelerazione tangenziale è nulla:
Il moto avviene con velocità di modulo costante
Dalla prima ottenaimo:
2
v
Nsen q m
R
2
mg
v
senq m
cos q
R
2
2
v
16.7
tan q
.35
gR 9.81*80
q ar cot an0.35 19.2
G.M. - Informatica B-Automazione 2002/03
Un corpo di massa m=1kg è appeso mediante una fune ideale di lunghezza
L=3 m al soffitto del Laboratorio. Determinare il periodo del pendolo
nell’ipotesi che esso venga abbandonato da fermo quando l’angolo formato
dalla fune con la verticale è di 5°. Si supponga che l’ampiezza delle
oscillazioni possa essere considerata piccola. Determinare inoltre il valore
della tensione nella fune quando passa per la posizione verticale.
Poniamoci nel sistema di riferimento del
Laboratorio (inerziale) per poter applicare le
leggi di Newton.
Determiniamo le forze agenti
sull’automobile
• La forza peso
• La Tensione della fune
La posizione del
pendolo può essere
individuata
specificando q
la seconda legge di Newton vale:
Applica
zione
q
T
P
Il diagramma del corpo libero
P T ma
v
Preliminarmente ricordiamo che in un moto circolare antiorario:
q
v r
dv dr d
at
r r
dt
dt
dt
G.M. - Informatica B-Automazione 2002/03
N.B.Per evitare complicazioni limitiamoci a considerare la parte di
moto antiorario del pendolo.
Applica
zione
Troviamo le tre equazioni scalari corrispondenti all’equazione
vettoriale. Utilizziamo le direzioni ut ed un mostrate in figura,
ed uz perpendicolare ai primi due.
un
T mg cos q ma n
ut
mg senq ma t
uz
0 ma z
q
Forza di richiamo,
opposta a q
un
T
P
Poiché az=0 è la velocità iniziale è nulla, possiamo
concludere che il moto del pendolo avviene nel piano della
figura.
dove è
Riscrivendo l’accelerazione tangenziale in a L
t
l' accelerazione angolare
termini di accelerazione angolare si ottiene:
mg senq ma q L gsen q
d 2q
dt
2
g
L
sen q
se q è piccolo
senq = q
ut
d2 q
2
dt
d 2q
g
q
2
dt
L
L’accelerazione è proporzionale all’opposto
della posizione: il moto è armonico!
G.M. - Informatica B-Automazione 2002/03
d 2q
g
Equazione differenziale del moto armonico con
q
pulsazione angolare p data da:
dt 2
L
p
g
L
La legge oraria è del tipo:
qt Acos p t
(t)
Applica
zione
T
dq
A p sen p t
dt
ut
P
In cui le costanti A e vanno determinati sulla base delle condizioni
inizali.
Miraccomando a non confondere la velocità angolare con cui si
muove il pendolo con la pulsazione angolare.
Pur avendo le stesse unità di misura sono completamente diverse:
•
•
un
q
La pulsazione angolare è una costante
p
La velocità angolare varia sinusoidalmente. Il pendolo si ferma, =0,
agli estremi dell’oscillazione ed è massima per q=0.
g
L
G.M. - Informatica B-Automazione 2002/03
Determiniamo le costanti A e :
Ricordiamo le condizioni iniziali:
qt 0s 5
(t 0s) 0
Quindi: 5 A cos
0 A p sen
Applica
zione
sen 0
0
La scelta =0, da una soluzione positiva dell’ampiezza:
La legge oraria diventa dunque:
g
9.81
5 *
qt
cos
t 0.087cos
t 0.087cos 1.81 t rad
180
L
3
q
un
T
ut
P
rad
(t) .157sen1.81 t
s
Abbiamo già verificato che la legge oraria del moto armonico è
periodica con periodo T=
T
2 2 3.14
3.47s
p
1.81
G.M. - Informatica B-Automazione 2002/03
Per il calcolo della Tensione riprendiamo l’equazione secondo un:
T mg cosq ma n
Dove an è uguale a:
Applica
zione
v2
an
2L
L
Per q = 0 la velocità angolare è massima: pari alla sua
ampiezza. Pertanto
T mg cosq m 2L
perq0
mg m 2p A2 L mg m
g 2
A L mg (1 A2 )
L
Confrontiamo questa tensione con quella che si ottiene
quando il pendolo è fermo in condizioni di equilibrio:
P T 0 T P
In condizioni di equilibrio T=mg ed è verticale: il filo si
dispone lungo la verticale (filo a piombo).
Per q=0 la tensione nel caso dinamico è più grande che in
quello statico perché essa oltre ad equilibrare il peso deve
fornire la forza centripeta necessaria per far percorrere al
pendolo una traiettoria circolare!!
q
un
T ut
P
G.M. - Informatica B-Automazione 2002/03
Una massa M è tenuta in equilibrio da una forza F applicata ad un sistema
di pulegge come mostrato in figura. Considerare le pulegge di massa
trascurabile e senza attrito trovare la tensione in ciascuna delle sezioni della
fune T1, T2,T3,T4,T5 e il modulo di F.
T4
T5
T5
F
M
I diagramma del corpo libero con le
forze agenti
T4
T2 T3
M
Mg
T1 T2 T3
Applica
zione
T5
T1
T2
T3
Per la proprietà delle corde ideali: T1 T2 T3 F
Usiamo il sistema di riferimento del Laboratorio (inerziale) per poter applicare le
leggi di Newton.
corpo di massa M
P T5 0
Carrucola piccola
T2 T3 T5 0
Carrucola grande
T5 Mg
T5 Mg 0
T1 T2 T3 T4 0
T2 T3 T5 0 2F T5
Mg
F
2
T1 T2 T3 T4 0
G.M. - Informatica B-Automazione 2002/03
T4
T5
M
Mg
T1 T2 T3
T5
F
M
I diagramma del corpo libero con le
forze agenti
T4
T2 T3
T1
T5
T3
Per la proprietà delle corde ideali: T1 T2 T3 F
corpo di massa M
P T5 0
Carrucola piccola
T2 T3 T5 0
T5 Mg
T5 Mg 0
T2 T3 T5 0
2F T5
Carrucola grande
T2
Applica
zione
T1 T2 T3 T4 0
F
Mg
2
T1 T2 T3 T4 0
T4 3F
T4
3Mg
2
G.M. - Informatica B-Automazione 2002/03
T4
T5
T1 T2 T3
M
Mg
I diagramma del corpo libero con le
forze agenti
T4
T2 T3
T5
T1
T2
Applica
zione
T3
T5
F
M
N.B.: Quando si ha a che fare con carrucole e corde, la tensione della
corda va pensata applicata alla carrucola nel punto di tangenza della corda
alla carrucola.
Infatti uno può pensare che la parte di corda a contatto della carrucola sia
un tutt’uno con la carrucola stessa (la corda non scorre sulla carrucola): ne
deriva che il punto di attacco della corda alla carrucola è proprio il punto
di tangenza.
G.M. - Informatica B-Automazione 2002/03
Due molle di costante elastica k1=104 N/m e k2=2x104 N/m,
rispettivamente, sono collegate come in figura. Una estremità di ciascuna
Applica
molla è fissato al soffitto mentre le altre sono vincolate ad un corpo di
zione
massa m=10kg. Si calcoli l’allungamento delle due molle quando il corpo è
in equilibrio.
y
Fel1
Fel2
m
O
P
m
G.M. - Informatica B-Automazione 2002/03
Due molle di costante elastica k1=104 N/m e k2=2x104 N/m,
rispettivamente, sono collegate come in figura. L’estremità superiore della
Applica
prima molla è fissato al soffitto mentre l’estremità inferiore è vincolata ad
zione
un corpo di massa m=10kg. Si calcoli l’allungamento di ciascuna molla e
quello complessivo quando il corpo è in equilibrio.
y
F1s
Molla 1
F21
Molla 2
F12
F2m
Fm2
Molla 1
P
Molla 2
m
m
F1s = forza sulla molla 1 dovuta al soffitto
F12 = forza sulla molla 1 dovuta alla molla 2 (il modulo F12=k2Dy2)
F21 = forza sulla molla 2 dovuta alla molla 1 (il modulo F21=k1Dy1)
F2m = forza sulla molla 2 dovuta al corpo di massa m
Fm2 = forza sul corpo di massa m dovuta alla molla 2
F12 =- F21
F2m =- Fm2
G.M. - Informatica B-Automazione 2002/03
Due parallelepipedi di masse m1 ed m2 sono posti uno sopra l’altro. Il
coefficiente di attrito tra m1 ed il piano è m1 mentre quello tra i due corpi è
Applica
m2. Studiare il moto del sistema quando ad m1 è applicata una forza
zione
orizzontale.
F
m2
m1
F
Fa12
N12
N
m1
P1
N21
m2
P2
Fa21
G.M. - Informatica B-Automazione 2002/03
Due blocchi (m=1.0 kg e M = 10 kg) e una molla (k=200 N/m) sono
sistemati come in figura su una superficie orizzontale priva di attrito. Il
coefficiente di attrito statico tra i due blocchi è 0.40. Qual è la massima
ampiezza del moto armonico semplice per evitare lo slittamento dei due
blocchi. Se l'ampiezza del moto è più piccola di quella massima quanto
vale il periodo?
Scrivere infine l'espressione (in funzione del tempo) della componente
verticale e di quella orizzontale della reazione vincolare esercitata dal
blocco di massa M su quello di massa m.
Applica
zione
Vedi il problema precedente: sostituire la forza F con
la forza elastica!
k
m
M
G.M. - Informatica B-Automazione 2002/03
Due masse, connesse da una corda ideale e priva di massa, passante su di
una carrucola assimilabile ad un disco, partono da ferme dalla posizione
illustrata in figura. Qual è la loro velocità relativa quando passano l’una di
fronte all’altra (stessa quota)?
Quanto tempo impiegano i due corpi per raggiungere questa
configurazione?
T1
Applica
zione
T2
P1
P2
T1= T2 =T
G.M. - Informatica B-Automazione 2002/03
Una lampada è sospesa ad un filo nella cabina di un ascensore. Si supponga
che la cabina stia salendo e, per fermarsi al piano, rallenta con una
accelerazione di modulo 2.4 m/s2. Se la tensione nel filo che sostiene la
lampada è di 89 N, qual è la massa della lampada?
Quale sarà la tensione nel filo quando l'ascensore riparte con una
accelerazione di pari modulo, 2.4 m/s2, per raggiungere un piano più in
alto?
T
P
Applica
zione
a
v
G.M. - Informatica B-Automazione 2002/03
Una palla viene lanciata contro un muro con la velocità iniziale di 25.0 m/s
a un angolo di 40° rispetto al suolo orizzontale come mostrato in figura. Il
muro si trova a 22 m dal punto di lancio.
Trascurando la resistenza dell’aria determinare:
• quanto tempo la palla rimane in aria prima di colpire la parete.
• quali sono le componenti orizzontale e verticale della velocità
all’istante in cui la palla colpisce la parete
• se nel momento in cui tocca la parete ha già superato il vertice della
traiettoria.
Applica
zione
G.M. - Informatica B-Automazione 2002/03
Un treno di massa 5x105 Kg sta viaggiando orizzontalmente a 60
km/h e sta effettuando una curva il cui raggio di curvatura è 1
km. Allo stesso tempo sta decelerando ed il tasso di decrescita
(accelerazione) del modulo della velocità è di 0.1 m/s2. La
lunghezza del treno è trascurabile confrontata con le dimensioni
della curva ed il treno può essere trattato come un punto. Che
forza totale esercitano i binari sul treno? (dare la risposta
all'inizio della curva, quando cioè la velocità può essere
considerata ancora uguale a 60 km/h).
Applica
zione
R=1 km
ut
un
G.M. - Informatica B-Automazione 2002/03
Due blocchi, di massa m1=2.3 kg e m2=1.2 kg, sono poggiati su un
piano orizzontale privo di attrito come mostrato in figura. Se al
corpo di massa m1 viene applicata una forza di intensità pari a
F=3.2 N, determinare l'accelerazione dei due blocchi e la forza di
contatto tra i due. Determinare le stesse quantità nel caso in cui
la forza F viene applicata al blocco di massa m2 e confrontarle con
quelle determinate precedentemente. Spiegare le eventuali
differenze.
m1
F
Applica
zione
m1
m2
m2
F
N1
F
m1
N12
P1
N2
N21 m2
P2
G.M. - Informatica B-Automazione 2002/03
Nella figura A e B sono due blocchi rispettivamente di 4.4 kg e
2.6 kg. I coefficienti di attrito statico e dinamico tra il blocco A e il
piano sono rispettivamente 0,18 e 0,15.
• Si determini la minima massa del corpo C che impedisce ad
A di scivolare.
• Improvvisamente il blocco C viene tolto da A. Valutare
l'accelerazione di A e la tensione nella corda.
NCA
C
N
A
NAC
C
A
C
PC
TA
Applica
zione
B
TB
B
PA
PB
G.M. - Informatica B-Automazione 2002/03
I due blocchi della figura, di massa m=16 kg e M=88 kg, non sono collegati
tra loro. Il coefficiente di attrito tra i blocchi è ms=0,38, mentre la superficie
Applica
su cui appoggia M è priva di attrito. Qual è l’intensità minima della forza
zione
orizzontale F necessaria per mantenere m contro M?
m
F
NmM FamM
F
Pm
M
NM
FamM
NMm
PM
G.M. - Informatica B-Automazione 2002/03