La reazione Vincolare
Il corpo è fermo su di un tavolo cioè in equilibrio:
N
a 0
mg
II legge di Newton: la forza complessiva agente sul corpo deve
essere nulla.
N mg 0 N mg
Il tavolo esercita una forza N uguale e contraria alla forza peso, in
modo tale che la forza risultante che agisce sul corpo sia nulla.
Le reazioni vincolari si manifestano ogni qual volta c’è un vincolo
ossia un impedimento al moto del corpo. Può avere una componente
normale o parallela al vincolo
1
Tensione dei fili
Corda inestensibile di massa trascurabile
F
Corpo m
T
II legge di Newton il corpo m tira la fune con
una forza uguale ed opposta alla tensione T
Fune
T
F
fune F T m funea x 0 F T
La fune tira il corpo m con
una tensione T
corpo : T max 0 ax T / m F / m
La fune ideale trasmette la forza da una estremità all’altra: la forza
applicata alla fune è uguale a quella che la fune applica al corpo m
2
Tensione dei fili
i -1
+T
i
-T
i+1
+T
-T
Se si taglia la corda in un punto
qualsiasi la parte a destra del taglio
eserciterà su quella a sinistra una
forza di modulo pari alla tensione e
viceversa.
La tensione può essere messa in
evidenza inserendo una molla nel
taglio e osservando il suo
allungamento
Carrucole ideali (piccolo raggio e
piccola massa, senza attriti)
cambiano la direzione della tensione
ma non l’intensità.
3
Tensione dei fili
FA ed FB forze applicate nei due
estremi per tendere il filo
|FB | = | T|
|FA |= |T|
FA
T
-T
FB
|FB|= | F A|= |F|
T forza esercitata agli estremi dal filo teso
Caso filo teso in moto:
INESTENDIBILE tutti i punti
si muovono con la stessa
accelerazione
Filo privo di massa m = 0
ma = 0 T è ancora la stessa in
ogni punto, come nel caso statico!
4
Applicazione
Diagramma di corpo libero
a2
x1
y2
T
y1
a1
N
T
m2 g
m1 g
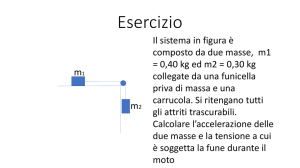
m1=10kg e m2=20kg.
m2 g T m2 a2 m2 g T m2 a2
T m1 gsen m1a1
T m1 g N m1a1
m1 g cos N
T m2 g m2 a
m2 m1sen g (m1 m2 )a
a
T
m2 m1sen g
(m1 m2 )
m1m2
(1 sen ) g
(m1 m2 )
5
Forza di attrito radente (attrito statico)
La Forza di attrito è la componente parallela al vincolo della Reazione
Vincolare. Si parla di attrito statico se non c’è scorrimento tra il corpo e la
superficie su cui il corpo è poggiato.
Proviamo a mettere in moto il corpo m esercitando
una forza Fa
m muove solo se
FA s N
coeff. d’attrito statico
s Dipende dalla superficie
N
Dipende dalla massa del corpo e dalle
condizioni di vincolo
a0
a0
FA s N
FA s N
6
Forza di attrito radente (attrito dinamico)
Se il corpo è già in moto
Fatt d N
d coefficiente di attrito dinamico
x:
FA Fatt ma
FA d N ma
d s
Sempre!!
e s 1
d ......
7
Applicazione
Diagramma di corpo libero
a2
x1
y2
T
y1
a1
N
T
m2 g
m1 g
m1=10kg e m2=20kg.
m2 g T m2 a2 m2 g T m2 a2
T m1 gsen m1a1
T m1 g N m1a1
m1 g cos N
T m2 g m2 a
m2 m1sen g (m1 m2 )a
a
T
m2 m1sen g
(m1 m2 )
m1m2
(1 sen ) g
(m1 m2 )
8
Applicazioni dei principi della dinamica..
at
p
moto vario
a
an
F m a
F m at m an
dv
v2
F m ut m u n
dt
R
Fn determina la variazione
della direzione della velocità
Ft determina la variazione
del modulo della velocità
Fn si chiama forza centripeta
9
Applicazioni….
Curva sopraelevata
10
Moto relativo: sistemi di riferimento inerziali
Sistemi di riferimento inerziali: la descrizione del moto (accelerazione
ed applicazione delle leggi di Newton) è la stessa.
y'
P
y
rP
rP rP rOO
rP
O'
rOO
O
v P vP vOO
x'
drP drP drOO
dt
dt
dt
x
Trasformazione galileiana delle velocità
Costante in modulo direzione e verso
Possono essere non costanti e differenti tra loro
11
Moto relativo: sistemi di riferimento inerziali
dv P dvP dv OO
dv P dvP
dt
dt
dt
dt
dt
aP aP
F ma P
Le leggi di Netwon possono quindi essere applicate a
qualunque osservatore in qualunque sistema di riferimento
inerziale.
12
Sistemi di riferimento NON inerziali
13