APPROSSIMAZIONE
DI FUNZIONI
AF - 1
• La regressione e la classificazione sono due aspetti particolari dell’
APPROSSIMAZIONE DI FUNZIONE
• Le MLP possono essere viste come particolari
REGRESSORI NON LINEARI
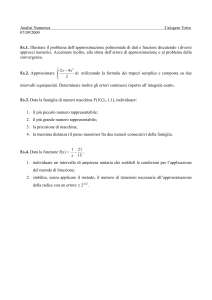
PROBLEMA
Sia: x input
d = f ( x ) funzione incognita
x
Obiettivo : trovare f (.) assegnato un
numero finito di coppie ( x , w )
f (.)
incognita
d
fˆ x, w
y
risposta
desiderata
+
e
• y fˆ x, w dipende dalla scelta di w che può essere modificato per
minimizzare la discrepanza tra y e d
• quando y approssima d, il sistema adattativo sta approssimando f x con la
sua mappa input-output y fˆ x, w
AF - 2
• La natura di f (.) e il criterio di errore definiscono il problema di learning
– Se f (.) lineare e criterio di errore MSE REGRESSIONE LINEARE
– Se f (.) produce valori 1/0 ( -1/ 1 ) classificazione.
In tale caso la funzione è chiamata FUNZIONE INDICATORE
– Anche il problema della generalizzazione può essere trattato
matematicamente nell’ottica dell’approssimazione di funzioni
UTILITA’ DELLE RNA NELL’APPROSSIMAZIONE DI FUNZIONE
– SONO APPROSSIMATORI UNIVERSALI
– SONO APPROSSIMATORI EFFICIENTI
– POSSONO ESSERE IMPLEMENTATE COME SISTEMI ADATTATIVI
OBIETTIVO DELLA AF
AF - 3
Descrivere il comportamento di funzioni altamente complesse utilizzando insiemi di
funzioni più semplici
Es:
- Legendre e Gauss uso di polinomi
- Sviluppo in serie di Taylor approssimazione nell’intorno di un punto
- Serie di Fourier uso dei polinomi trigonometrici
Generalizzazione
Hp:
f ( x) reale x x1,, xD T reale
f (x) quadratica mente integrabil e
TEOREMA DELLA PROIEZIONE LINEARE
Si può descrivere f(x), in una area compatta S dello spazio degli ingressi attraverso
una combinazione di funzioni semplici jix), cioè:
N
Con e arbitrariamente piccolo
i 1
fˆ ( x, w) approssima nte di f ( x)
fˆ ( x, w) wiji ( x)
con w w1,, wN tale che : f ( x) fˆ ( x, w) e
ji funzioni elementari
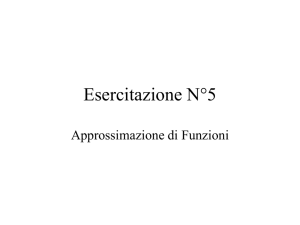
REALIZZAZIONE
AF - 4
j1
j2
x1
x2
w2
jk wk
xd
w1
S
f (x,w)
wN
jN
Quando si determinano i coefficienti wi che rendono e arbitrariemente piccolo per
qualunque f (.) nel dominio d’interesse si dice che l’insieme {ji (.)} ha la proprietà di
approssimatore universale sulla classe f (.), o anche che l’insieme è completo
PROBLEMI
1. SCEGLIERE LE FUNZIONI ELEMENTARI
ji (.)
2. CALCOLARE I PESI wi
3. SELEZIONARE IL NUMERO N DI FUNZIONI ELEMENTARI
1. AMPIA SCELTA (TRIGONOMETRICHE, SINC, WAVELET, etc.)
Nota: I neuroni nascosti di una MLP con 1 strato nascosto implementano una possibile
scelta delle funzioni elementari ji (.)
2. La scelta dei wi dipende dal criterio usato per calcolare la discrepanza tra f (x ) e fˆ ( x, w)
Es: criterio LS
i wi possono essere calcolati analiticamente
AF - 5
Se N è pari al numero di pattern d’ingresso xi: si può scrivere:
j1 ( x1 ) j N ( x1 ) w1 f ( x1 )
w 1 f
j1 ( xN ) j N ( xN ) wN f ( xN )
f è un vettore dei valori della funzione negli N punti
CRITERI PER LA SCELTA DELLE {ji(.)}
• Devono essere approssimatori universali per la classe di funzioni f(.)
• Devono essere facilmente trattabili matematicamente
• Deve esistere 1 ( x) verificato se le ji costituiscono una base, cioè sono linearmente
indipendenti w1j1( x) wNj N ( x) 0 se e solo se (w1,, wN ) 0
SPESSO SI ASSUME CHE LE {ji(.)} SIANO UNA BASE ORTONORMALE
TEOREMA DEL CAMPIONAMENTO
AF - 6
Si può approssimare qualunque segnale reale che sia smooth in un intervallo
conoscendo i valori del segnale in un insieme finito di punti equispaziati (detti
campioni) nell’intervallo
a) Funzioni sinc
ji ( x) sinc( x xi )
sin( x xi )
x xi
Si può dimostrare che i pesi sono i valori del segnale nei punti di campionamento
b) Serie di Fourier
AF - 7
c) Wavelet
• Nella trasformata di Fourier le funzioni elementari hanno estensione infinita
nel tempo
• In molte applicazioni i segnali hanno durata temporale finita (es. transitori)
• L’idea alla base dell’analisi wavelet è di scegliere una forma d’onda adatta a
rappresentare il segnale e poi creare molte versioni traslate e scalate dell’onda
“madre”
• La decomposizione wavelet ha due parametri:
fˆ ( x, w) wijj ij ( x)
i
j
j ij ( x) 2 j / 2 j (2 j x i )
Traslazione e scalatura di
una wavelet
• Usando sistemi adattativi i pesi possono essere trovati attraverso il learning
piuttosto che analiticamente
AF - 8
• Le basi sono dipendenti dai dati
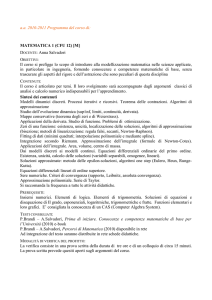
Basi per l’approssimazione di funzioni non lineari con le MLP
• Funzioni elementari locali: rispondono primariamente ad un’area limitata
dello spazio degli ingressi
• Funzioni elementari globali: rispondono all’intero spazio degli ingressi
+1
X1
X2
XD
b1
j1
a11
ji
w1
w1
S
y
ji ( x) aik xk bi
k
y wiji
i
La MLP realizza l’approssimazione di funzione usando come basi esattamente le
uscite dei neuroni nascosti
Approssimazione con funzioni logistiche
AF - 9
Nota: i neuroni sigmoidali realizzano funzioni elementari globali
Interpretazione: la MLP sta realizzando una approssimazione di funzione con un
set di BASI ADATTATIVE che vengono realizzate dai dati di input-output
Esse dipendono dai pesi del primo strato e dagli ingressi
RADIAL BASIS FUNCTION (RBF)
AF - 10
ji ( x) ( x xi )
• di norma è una gaussiana:
x2
mono - dimensiona le
G ( x ) exp
2
2
x T 1 x
multi - dimensiona le
G ( x ) exp
2
2 : varianza
2 I : matrice di covarianza
• La gaussiana è centrata in x i con varianza 2 : ha il massimo della risposta
nell’intorno dell’ingresso x i e decade esponenzialmente col quadrato della distanza
• Sono funzioni elementari locali
N
• Dalla: ˆ
f ( x, w) wij i( x)
i 1
fˆ ( x, w) wiG x xi
i
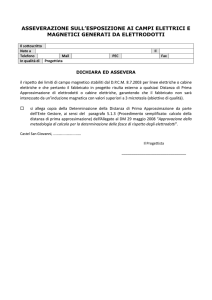
APPROSSIMAZIONE CON RBF monodimensionale
L’APPROSSIMAZIONE CON RBF RICHIEDE:
AF - 11
• Il posizionamento delle Gaussiane per coprire lo spazio degli ingressi
• Il controllo dell’ampiezza di ciascuna Gaussiana
• Il controllo della larghezza di ciascuna Gaussiana
DIFFERENZE TRA MLP E RBF
RBF:
- basi locali modificandone una non si influenza l’approssimazione nelle altre
zone dello spazio
- il numero di RBF cresce esponenzialmente con le dimensioni dello spazio da
coprire
- Allenamento efficiente una volta determinati i centri delle funzioni infatti
l’errore è lineare coi pesi
- Convergenza al minimo globale purché i pesi siano posizionati in modo ottimo
LE RBF SONO MOLTO ADATTE PER L’IDENTIFICAZIONE DI SISTEMI
Scelta del numero di basi
AF - 12
Una scelta ottimale discende da un compromesso tra l’errore sul modello e la sua
varianza
Analogia col fitting polinomiale
Alto bias (errore)
Alta varianza non generalizza
• I fiducial sono gli esempi del trainig set
• Il dominio completo è costituito da tutti i dati possibili d’ingresso
• Il polinomio corrisponde alla mappa input/output creata dalla rete
• I coefficienti del polinomio equivalgono ai pesi delle connessioni
• Il grado del polinomio corrisponde al numero di pesi