RICOSTRUZIONE DELL’IMMAGINE
SISTEMA OTTICO A DUE LENTI
Si è visto che con una lente è possibile fare la trasformata di Fourier di una immagine posta sul
piano focale anteriore. L’idea più ovvia per costruire un sistema completo per l’elaborazione di
immagini è quella di utilizzare una seconda lente in modo tale da ricostruire l’immagine di partenza
(per farne l’antitrasformata).
Si consideri il seguente sistema:
PT
PI
f1
PIR
f1
f2
f2
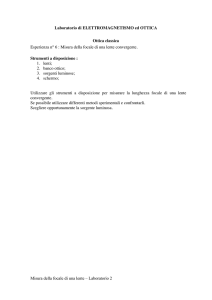
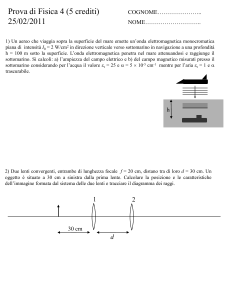
Fig. 18 – Sistema a due lenti
Sia f ( x, y ) l’immagine presente all’ingresso del sistema (piano PI). A causa della prima lente, sul
piano PT è presente la trasformata di f ( x, y ) :
F (, ) f ( x, y )e
j
2
( x y )
f1
dxdy
Anche la seconda lente fa la trasformata dell’immagine che trova sul suo piano focale anteriore.
Poiché questo coincide con il piano PT, l’immagine che la seconda lente vede in ingresso è proprio
F (, ) . Sul piano focale posteriore della seconda lente (piano PIR) ritroviamo dunque la
trasformata della trasformata di f ( x, y ) :
f ( x' , y ' ) F (, )e
*
j
2
( x 'y ')
f 2
dd
(x’ e y’ sono le coordinate del piano PIR)
definendo due nuove variabili:
x' ' x'
y' ' y
127
si ottiene:
f ( x' ' , y' ' ) F (, )e
*
j
2
(x ''y '')
f 2
dd F (, )e
j
2 f1
(x ''y '')
f1 f 2
dd
con un ulteriore cambio di variabili:
x
y
f1
x' '
f2
f1
y' '
f2
si trova il risultato:
f ( x, y ) F (, )e
*
j
2
( x y )
f 1
d d
Ma questa è proprio l’espressione dell’antitrasformata di Fourier di F (, ) : si è così dimostrato
f
f
f * x, y f * ( 1 x ' , 1 y ' )
f2
f2
che
coincide con f ( x, y ) .
*
L’immagine ricostruita dal sistema sul piano PIR, f ( x' , y ' ) , corrisponde dunque all’immagine
presente in ingresso, capovolta ed ingrandita del rapporto f2/f1. Questo risultato è comprovato
dall’ottica geometrica:
f2
y1
f1
f1
f2
y2
Fig. 19 – Sistema di elaborazione a due lenti interpretato secondo d’ottica geometrica
128
SISTEMA A LENTE SINGOLA A IMMAGINE REALE
ED A IMMAGINE VIRTUALE
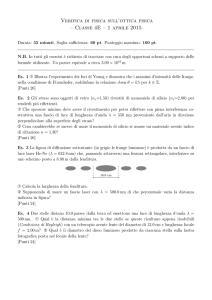
Si consideri il sistema di figura 20, in cui l’immagine illuminata dal fascio collimato è su uno dei
piani anteriori di una lente convergente
PI
PT
s
f
l
PIR
PIR
f2/s
f
PI
s
d
PT
l
f
f
2
f /s
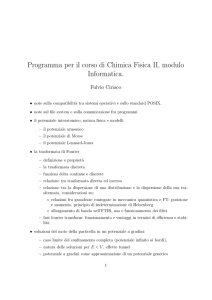
Fig. 20 – Sistemi a lente singola
L’immagine sul piano PI viene ricostruita secondo la legge dei punti coniugati che lega l (la
distanza fra l’immagine originale e la lente), d (la distanza fra l’immagine ricostruita e la lente
stessa) e f (la distanza focale) nella seguente relazione:
1 1 1
l d
f
Ponendo l f s la relazione in questione assume la forma
d f
f2
s
Se s >0 l’immagine riprodotta è reale (viene proiettata). In particolare:
se s<f si ha un ingrandimento dell’immagine
se s = f la riproduzione avviene in scala 1:1.
se s<0 l’immagine riprodotta è virtuale.
Nel caso s = 0 (immagine posta sul piano focale anteriore della lente), ci si riconduce alla situazione
del caso precedentemente analizzato: sul piano focale posteriore abbiamo la trasformata di Fourier,
e bisogna utilizzare una seconda lente per ricostruire l’immagine.
Ci si chiede se anche nel caso s 0 , sul piano focale posteriore della lente si ritrovi la trasformata
di Fourier. Se così fosse, si potrebbe trasformare un’immagine e ricostruirla con l’ausilio di una sola
lente.
129
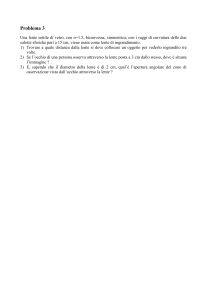
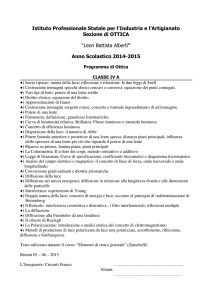
In effetti sul piano posteriore si produce ancora la trasformata di Fourier, ma affetta da errore.
Confrontando le figure 21 e 22 ci si rende conto della differenza. Nel caso s = 0 il piano focale
posteriore è attraversato da onde piane, mentre nel caso s 0 viene attraversato da onde sferiche:
ciò porta ad avere una fase che, invece di essere costante, varia con il quadrato della distanza
dall’asse ottico. Questa situazione è quindi caratterizzata da un errore di fase quadratico (EFQ) e
costituirà l’argomento di un capitolo successivo.
Figure 21 e 22 – Spiegazione intuitiva dell’errore di fase quadratico
Se l’immagine ricostruita è reale può venire proiettata sulla pellicola contenuta in una macchina
fotografica priva di obbiettivo, sulla superficie sensibile di un vidicon, ecc.
Se è virtuale, la si può fotografare con una macchina fotografica munita di un obbiettivo messo a
fuoco alla distanza corretta, ricavabile dalla
df
f2
s
SISTEMI A FASCIO COLLIMATO
I sistemi finora analizzati vengono detti “sistemi a fascio collimato”: in essi, l’immagine viene
illuminata da un’onda piana uniforme. È tuttavia possibile svincolarsi da questa ipotesi e lavorare
nella condizione più generale in cui l’onda incidente sia sfericaP.T.
(divergente o convergente).
Per capire come sia possibile tale generalizzazione bisogna considerare un sistema a fascio
collimato in cui non ci sia alcuna immagine in ingresso: in questo caso l’onda piana incidente non
porta con sé alcuna informazione.
P.T.
Figura 23 – Piano della trasformata in
sistemi a fascio collimato
immagine fittizia
S
Fig. 23 – Piano della trasformata in sistemi a fascio collimato
130
P.T.
P.T.
Figura 23 – Piano della trasformata in
sistemi a fascio collimato
S
Fig. 24 – piano della trasformata in sistemi a fascio non collimato
immagine fittizia
Non essendoci alcun contenuto informativo (solo la continua), la trasformata è un impulso a
frequenza spaziale nulla. Da ciò si deduce che il piano della trasformata (coincidente in questo caso
con il piano focale posteriore) viene individuato dal punto coniugato della sorgente (che in questo
caso essendo il fascio collimato, è all’infinito)
Nel caso di sistemi a fascio non collimato il discorso rimane corretto: si trova sempre un punto che
individua il piano della trasformata (non più coincidente in questo caso, però, con il piano focale
posteriore). Per individuare tale punto, nei sistemi ad onda sferica divergente, si usa un artificio: si
mette un’immagine fittizia al posto del punto sorgente dell’onda sferica incidente e si trova
l’immagine coniugata. Si è così automaticamente trovato anche il punto immagine della sorgente
puntiforme.
Ci sono dei limiti nell’utilizzo di questi sistemi. Infatti l’immagine da elaborare deve stare
all’interno del cono di luce della sorgente ma non conviene che superi il fuoco della lente per
evitare complicazioni con immagini virtuali: esistono dunque un limite inferiore ed uno superiore
per la posizione dell’immagine.
Il sistema ottico di figura 25 usa una sorgente di tipo puntiforme: l’onda sferica generata viene
focalizzata sul piano coniugato del piano sorgente (piano della trasformata) e l’immagine viene
ricostruita sul piano coniugato dell’immagine.
PS
PI
PT
f
PIR
f
Fig. 25 - Sistema ottico ad una lente con sorgente puntiforme su PS e immagine ricostruita reale su PIR.
Il sistema rappresentato in figura 26 prevede di illuminare l’immagine da trasformare mediante un
fascio laser convergente a distanza f. La trasformata di Fourier dell’immagine si ottiene in questo
caso direttamente sul piano di convergenza. Le relazioni tra coordinate e pulsazioni spaziali
diventano:
131
q
2
f l
p
2
f l
PT
PI
f
PIR
f2
D
l
Fig. 16 - Sistema ottico a fascio convergente. Si può dimostrare che la lente ricostruisce l'immagine a
distanza tale da correggere l'errore di fase sulla trasformata prodotto dalla lente di trasformazione: D =
f2(1+f2(f-l)).
Si può osservare che:
f può essere molto grande e quindi è possibile ottenere una trasformata estesa anche di immagini
di scarsa definizione, cioè a basso contenuto spettrale. Il fascio convergente può essere ottenuto
mediante lo stesso telescopio espanditore usato per generare l’onda piana uniforme nei sistemi
ottici illustrati precedentemente.
Per variare (f-l) basta far scorrere l’immagine lungo l’asse ottico. Una variazione di (f-l) implica
una variazione del fattore di scala della trasformata: a parità di frequenze spaziali p e q variano
le distanze e misurate sul piano della trasformata. Se sul piano della trasformata è posto un
filtro una variazione del fattore di scala della trasformata consente di ottenere gli stessi risultati
che si avrebbero variando il fattore di scala della maschera del filtro. Poiché nell’elaborazione
ottica i filtri sono spesso di costruzione laboriosa e non sempre è facile individuare con
esattezza la banda passante del filtro, il sistema a fascio convergente può consentire notevoli
elasticità e risparmio di tempo.
La trasformata è affetta da un errore di fase di tipo quadratico che può essere corretto nella
ricostruzione.
Poiché il rapporto fra le dimensioni lineari dell’immagine ricostruita e quelle dell’immagine di
partenza è direttamente proporzionale a f2/(f-l) dove f2 è la distanza focale della lente di
ricostruzione dell’immagine, è chiaro che a meno di non usare anche per la ricostruzione una
lente di lunga focale l’immagine ricostruita è molto piccola, tanto che spesso è necessario
proiettarla con un obiettivo a forte ingrandimento.
ERRORE DI FASE QUADRATICO
L’errore di fase quadratico sulla trasformata si origina quando le onde sferiche (sorgenti puntiformi)
di cui si può considerare formata l’immagine non si trasformano, sul piano della trasformata, in
onde piane, ma in onde sferiche convergenti o divergenti.
132
Abbiamo già messo in evidenza questo problema affrontando il tema dei sistemi a lente singola, nel
caso in cui l’immagine d’ingresso si trovi a distanza s0 dal piano focale anteriore della lente: si
vuole ora quantificare questo errore di fase.
Per fare ciò conviene riprendere il sistema di figura 20:
PI
PT
PIR
d
S’
O
S
l
f
f
d
fc
Fig. 27 - sistema ottico ad una lente che mette in evidenza il fronte d'onda sferico che riproduce una
sorgente puntiforme sull'immagine ricostruita a partire dalla sorgente coniugata, sul piano immagine.
Una sorgente puntiforme S sul piano immagine va a fuoco in S’ sul piano (coniugato)
dell’immagine ricostruita. Il campo corrispondente sul piano della trasformata (che dovrebbe essere
un’onda piana per poter descrivere l’immagine in termini di trasformata di Fourier) si può quindi
calcolare come risultante dal campo sferico che converge in S’.
Con gli stessi passaggi fatti per determinare la trasformazione di fase delle lenti sottili, si calcola
come varia sul piano (O,) della trasformata la fase del campo sferico con centro in S’:
k 2
2 fc
Il campo sul piano (O,) prodotto dalla sorgente puntiforme su PI si scrive dunque come:
j
e
2
2 fc
k
Poiché dalla legge dei punti coniugati si ha:
d
lf
f l
e
fc = d-f
si ottiene
133
f2
fc
l f
e l’espressione dell’errore di fase quadratico diventa:
j
e
1
2f
l
k 1
f
2
L’EFQ rappresenta una rotazione di fase proporzionale al quadrato della distanza misurata sul piano
della trasformata. Se l = f (s = 0) l’errore si annulla (il fattore moltiplicativo assume il valore 1).
CORREZIONE DELL’ERRORE DI FASE QUADRATICO
Si vede dalla figura 27 che è possibile correggere l’errore di fase quadratico inserendo sul piano PT
una lente di correzione in grado di rendere piane le onde sferiche convergenti o divergenti con
centro in S’. La distanza fc assume allora il significato di distanza focale della lente di correzione. Si
vede che per la correzione dell’errore dovrà essere:
se l<f lente convergente con f c
se l>f lente divergente con f c
f
2
f l
f2
.
l f
PI
PT
PIR
Lente di
correzione
f1
f1
fc
f2
f2
Fig. 28 - sistema a due lenti più una di correzione dell'errore di fase quadratico in sistema a fascio parallelo.
Consideriamo ora, figura 28, un sistema a due lenti in cui l’immagine non sia posta sul piano focale
anteriore della prima lente. Una terza lente di focale fc può correggere l’errore di fase quadratico.
A questo punto la seconda lente di focale f2 ricostruisce l’immagine a partire dalla trasformata
corretta.
Si noti che il procedimento illustrato è un caso particolare di filtraggio di fase: uno dei metodi per
operare filtraggi di fase consiste appunto nell’introdurre sul piano della trasformata un materiale ad
indice di rifrazione diverso da quello dell’aria, il cui spessore deve variare in base alle specifiche
134
del filtro. Si noti anche come il sistema ottico di figura possa venire impiegato per produrre ad arte
un errore di fase quadratico onde osservarne le conseguenze su un’immagine e/o per correggerlo,
totalmente o parzialmente.
Riportiamo qui di seguito alcuni possibili esempi di sistemi di elaborazione ottica in cui l’errore di
fase quadratico è stato corretto mediante una lente di correzione.
PT
PI
fc
PIR
f
f
Fig. 29 - Correzione dell'errore di fase quadratico in un sistema ottico a fascio convergente mediante lente di
correzione.
PI
PT
f
f
PIR
fc
Fig. 30 - Correzione dell'errore di fase quadratico in un sistema a lente singola e immagine ricostruita reale.
PIR
PI
PT
l
d
f
f
fc
Fig. 31 - Correzione dell'errore di fase quadratico in un sistema a singola lente con immagine ricostruita
virtuale.
135
ESPERIMENTO DI LABORATORIO
PI
PT
s
PIR
l
f
f
f
f
f2 /s
Fig. 32 - Sistema ottico a due lenti più una di correzione con sorgente a fascio parallelo utilizzato per
acquisire le immagini affette da errore di fase quadratico.
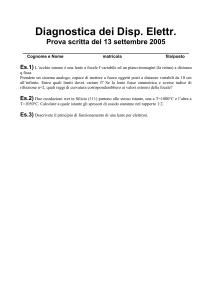
Le figure seguenti mostrano (figura 33) un’immagine di prova, la stessa immagine riprodotta nel
sistema di figura 32 a partire da una trasformata affetta da errore di fase quadratico (figura 34) (f =
381mm l = 266mm) e, figura 35, la stessa immagine con errore parzialmente corretto (f = 381mm l
= 280 fc = 1268).
136
Fig. 33 – Immagine senza errore di fase
Fig. 34 - Immagine ricostruita con errore di fase quadratico.
137
Fig. 35 - Immagine ricostruita con errore di fase quadratico parzialmente corretto.
Paragrafo successivo
Paragrafo precedente
Indice del capitolo
Indice generale
138