Università di Napoli Federico II – Facoltà di Ingegneria
Corso di Laurea in Ingegneria Meccanica (II anno – I semestre- M-Z)- 9 CFU- prof. G. Lupò
Elettrotecnica e Complementi
Appendice A1 -LE UNITÀ DI MISURA DEL SISTEMA
INTERNAZIONALE (2007)
§A1.1 Le unità di misura fondamentali
Quantità fisica
Simbolo della quantità
fisica
Nome dell'unità
SI
Simbolo dell'unità
SI
lunghezza
massa
tempo
corrente elettrica
temperatura
termodinamica
quantità di sostanza
intensità luminosa
l
m
t
I, i
T
metro
chilogrammo
secondo
ampere
kelvin
m
kg
s
A
K
n
IV
mole
candela
mol
cd
- Il metro è definito1 come la distanza percorsa dalla luce nel vuoto in un intervallo di
tempo pari a 1/299 792 458 di secondo (1983).
- Il chilogrammo è la massa di un particolare cilindro di altezza e diametro pari a 0,039 m
di una lega di platino-iridio depositato presso l'Ufficio internazionale dei pesi e delle
misure a Sèvres, in Francia. (1875)
- Il secondo è definito come la durata di 9 192 631 770 periodi della radiazione
corrispondente alla transizione tra due livelli iperfini, da (F=4, MF=0) a (F=3, MF=0), dello
stato fondamentale dell'atomo di cesio-133 (1967).
- L’ ampere è l'intensità di corrente elettrica che, se mantenuta in due conduttori lineari
paralleli, di lunghezza infinita e sezione trasversale trascurabile, posti a un metro di
distanza l'uno dall'altro nel vuoto, produce tra questi una forza pari a 2 • 10 -7 newton per
metro di lunghezza. (1946)
- Il kelvin è definito come 1/273,16 della temperatura termodinamica del punto triplo
dell'acqua. (1862)
- La mole viene definita come la quantità di sostanza di un sistema che contiene un
numero di entità elementari pari al numero di atomi presenti in 12 grammi di carbonio-12
(numero di Avogadro: 6,022 • 1023) . (1971)
- La candela è pari all'intensità luminosa, in una data direzione, di una sorgente emettente
una radiazione monocromatica di frequenza pari a 540 • 1012 hertz e di intensità radiante
in quella direzione di 1/683 di watt per steradiante (1982).
Si riportano le definizioni ufficiali. Ovviamente esistono campioni di riferimento “storici” (vedi museo di Sèvres) di
interesse praticamente immutato dal punto di vista “ingegneristico”.
1
§A1.2 Le unità di misura derivate (di interesse elettrotecnico)
La maggior parte delle grandezze derivate provengono da una moltiplicazione o una
divisione di grandezze di base. Alcune di esse hanno nomi particolari. In questo modo,
non solo si vede immediatamente la relazione che intercorre tra due grandezze, ma, con
un controllo dimensionale, lo studente ha una prima possibilità di verificare la possibile
correttezza del proprio lavoro.
Quantità fisica
Simbolo
Nome dell'unità SI Simbolo dell'unità SI
frequenza
f, ν
hertz
Hz
s−1
forza
F
newton
N
kg · m · s−2
pressione, sollecitazione
p
pascal
Pa
N · m−2
energia, lavoro
E
joule
J
N·m
potenza, flusso radiante
P, W
watt
W
J · s−1
carica elettrica
q
coulomb
C
A·s
tensione elettrica, potenziale
v
Volt
V
J · C−1
resistenza elettrica
R
Ohm
Ω
V · A−1
conduttanza elettrica
G
Siemens
S
A · V−1
capacità elettrica
C
Farad
F
C · V−1
induzione magnetica
B
Tesla
T
V · s · m−2
flusso magnetico
Φ(B)
weber
Wb
V·s
induttanza
L
henry
H
V · s · A−1
temperatura
T
kelvin
°C
K
angolo piano
φ, θ
radiante
rad
1
angolo solido
Ω
steradiante
sr
1
flusso luminoso
lumen
lm
cd · sr
illuminamento
lux
lx
cd · sr · m−2
diottria
D
m−1
attività di un radionuclide
becquerel
Bq
s−1
dose assorbita
gray
Gy
J · kg−1
dose equivalente
sievert
Sv
J · kg−1
rifrazione
D
A.1.3 Prefissi
Le unità SI possono avere prefissi per rendere più comodamente utilizzabili grandi e
piccole misurazioni. Si noti l'importanza di utilizzare correttamente i simboli maiuscoli e
minuscoli per evitare ambiguità..
Prefisso Simbolo Nome
Equivalente decimale
1024 yotta
Y
Quadrilione
1 000 000 000 000 000 000 000 000
1021 zetta
Z
Triliardo
1 000 000 000 000 000 000 000
1018 exa
E
Trilione
1 000 000 000 000 000 000
1015 peta
P
Biliardo
1 000 000 000 000 000
1012 tera
T
Bilione
1 000 000 000 000
109
giga
G
Miliardo
1 000 000 000
106
mega
M
Milione
1 000 000
103
kilo o chilo k
Mille
1 000
102
etto
h
Cento
100
10
deca
da
Dieci
10
10−1 deci
d
Decimo
0,1
10−2 centi
c
Centesimo
0,01
10−3 milli
m
Millesimo
0,001
10−6 micro
µ
Milionesimo
0,000 001
10−9 nano
n
Miliardesimo
0,000 000 001
10−12 pico
p
Bilionesimo
0,000 000 000 001
10−15 femto
f
Biliardesimo
0,000 000 000 000 001
10−18 atto
a
Trilionesimo
0,000 000 000 000 000 001
10−21 zepto
z
Triliardesimo
0,000 000 000 000 000 000 001
10−24 yocto
y
Quadrilionesimo 0,000 000 000 000 000 000 000 001
§A1.4 Unità di misura tollerate nel SI
Le seguenti unità di misura non fanno parte del Sistema Internazionale, ma il loro uso
viene tollerato, anche in ambienti ufficiali.
Nome
Simbolo Equivalenza in termini di unità fondamentali SI
minuto
min
1 min = 60 s
ora
h
1 h = 60 min = 3 600 s
giorno
d
1 d = 24 h = 86 400 s
grado
°
1° = (π/180) rad
minuto primo ′
1′ = (1/60)° = (π/10 800) rad
secondo
″
1″ = (1/60)′ = (π/648 000) rad
litro
l, L
1 L = 1 dm3 = 10-3 m3
tonnellata
t
1 t = 103 kg
neper
Np
1 Np = 1
bel
B
1 B = (1/2) ln 10 (Np)
Il neper e il bel esprimono il logaritmo in base e o in base 10 di una grandezza presa
rispetto ad un riferimento. Il logaritmo in base 10 dà l’ordine di grandezza in più o in
meno rispetto al riferimento ed è quindi usato in Ingegneria molto più spesso di quanto si
pensi, spesso involontariamente: se ad esempio pensiamo ad un oggetto un milione di
volte più grande di un altro, diciamo che tra i due ci sono 6 ordini di grandezza, cioè 6 bel.
La misura logaritmica serve anche a meglio leggere fenomeni a scala fortemente non
lineare ed il decibel (dB) serve appunto in molte discipline quali acustica, elettronica,
chimica a valutare la crescita (guadagno) o l’attenuazione di una grandezza.
§A1.5 Unità (non apparteneti al SI) accettate perché più precise.
Nome
Simbolo Equivalenza in termini di unità fondamentali SI
elettronvolt
eV
1 eV = 1,602 177 33(49) · 10–19 J
unità di massa atomica u
1 u = 1,660 540 2(10) · 10–27 kg
unità astronomica
1 ua = 1,495 978 70(30) · 1011 m
ua
Un elettronvolt (simbolo eV) è l'energia acquistata da un elettrone libero nel suo
spostamento tra due punto a potenziale differente per un volt.Un elettronvolt è un
quantitativo molto piccolo di energia: 1 eV = 1,602 176 46 × 10-19 J.
L’Unità Astronomica (U.A., o semplicemente UA) è un'unità di misura circa pari alla
distanza media tra il pianeta Terra e il Sole
L'unità di massa atomica unificata (u) detta anche dalton (Da) è una unità di misura
utilizzata solitamente per esprimere la massa di atomi (massa atomica) e molecole
(massa molecolare). Essa è definita come la dodicesima parte della massa di un atomo
di carbonio-12 (12C).
A.1.6 Altre unità non SI accettate in ambiti commerciali, legali, e nella navigazione.
Queste unità dovrebbero essere definite in relazione al SI in ogni documento in cui
vengono usate. Il loro uso è scoraggiato.
Nome
Simbolo Equivalenza in termini di unità fondamentali SI
miglio nautico nm
1 miglio nautico =1 852 m
nodo
kn
1 nodo = 1 miglio nautico all'ora = (1 852/3 600) m/s
ara
a
1 a = 1 dam2 = 102 m2
ettaro
ha
1 ha = 1 hm2 = 104 m2
bar
bar
1 bar = 0,1 MPa = 100 kPa = 1 000 hPa = 105 Pa
angstrom
Å
1 Å = 0,1 nm = 10-10 m
barn
b
1 b = 100 fm2 = 10-28 m2
Appendice A2
RICHIAMI SUGLI OPERATORI VETTORIALI
La divergenza di un campo vettoriale A in un punto P è una quantità scalare e può essere
definita (cfr. il teorema della divergenza) con un processo al limite a partire dal flusso del
vettore attraverso una superficie chiusa racchiudente P, rapportato al volume definito
dalla superficie stessa e facendo implodere la superficie chiusa intorno al punto P.
L’operatore di divergenza si indica con o con div. Un campo a divergenza nulla è
indivergente o solenoidale.
Considerando il vettore r (raggio vettore in geometria sferica) si avrà
r 4r 2
r lim 0
lim 0
3
4 3
r
3
Il rotore di un campo vettoriale A in un punto P è un vettore che può essere definito (cfr. il
teorema di Stokes) considerando una superficie elementare orientata S (es. un cerchio)
contenente il punto P ; il modulo del rotore è pari al massimo valore – al variare della
giacitura della superficie – della circuitazione C lungo l’orlo della superficie stessa,
rapportata alla suddetta superficie; la direzione ed il verso del rotore sono definiti dalla
normale alla superficie nella posizione in cui la circuitazione è massima. L’operatore di
rotore si indica con o con rot o curl. Un campo a rotore nullo è irrotazionale.
Considerando il vettore r (raggio vettore in geometria sferica) si avrà
C
xr lim S 0
0
S
Un ulteriore operatore differenziale (spaziale) è il gradiente . Esso opera su un campo
scalare f(P): il suo modulo è individuato dalla massima derivata direzionale condotta su
ogni retta orientata passante per il punto P, la direzione ed il verso sono dettati dalla retta
orientata per cui si ha la massima derivata. Le componenti (ad es. cartesiane) possono
generare una forma differenziale esatta (la circuitazione del gradiente lungo una qualsiasi
linea chiusa. Nel caso elettrostatico la funzione f(P) è il potenziale (elettrostatico) ed il suo
gradiente è (a parte il segno) pari al campo (elettrostatico).
Considerando il vettore r (raggio vettore in geometria sferica) si avrà
r
r
r
1
r
3
r
r
Considerato due campi scalari f(P) e (P) valgono le relazioni
f f f
A A A
A A A
Si riconosce che la divergenza del rotore è nulla e quindi anche il flusso del rotore
attraverso una superficie chiusa è nullo. Il gradiente della divergenza è detto laplaciano
(scalare) 2 .
Si definisce anche il laplaciano di un campo vettoriale come
2 A A ( A)
Un campo ovunque solenoidale è conservativo per il flusso e può essere descritto come il
rotore di un altro campo vettoriale detto potenziale vettore (esempio il potenziale vettore
magnetico)
La circuitazione di un campo ovunque irrotazionale è sempre nulla; il campo si dice
conservativo per il lavoro (es campo elettrostatico). Ne consegue che il rotore di un
gradiente è sempre nullo.
Tali proprietà possono essere opportunamente valutate anche in domini limitati.
Appendice A3
LE EQUAZIONI DI MAXWELL IN FORMA LOCALE
Laddove le grandezze (scalari e vettoriali) presenti nelle (0.1)-(0.4) siano continue e
derivabili, il campo elettromagnetico può essere descritto in tutti i punti dello spazio
attraverso gli operatori differenziali spaziali e temporali divergenza e rotore
B
(A3.1)
E
t
E
(A3.2)
0
B 0 (A3.3)
E
(A3.4)
B 0 J 0
t
Per integrare queste equazioni nello spazio occorre conoscere le “condizioni al contorno”
(nello spazio, all’infinito o al finito) e le “condizioni iniziali” (nel tempo).
Le equazioni di Maxwell in forma locale ci evidenziano le sorgenti del campo
elettromagnetico, in termini di divergenza (“fontane o pozzi”) o in termine di rotore
(“vortici”).
Le sorgenti possono dipendere direttamente dai campi (“sorgenti interne”, in rosso) o
meno (“sorgenti esterne”, in blu; in realtà, anche le sorgenti “esterne” possono essere
“prodotte” dai campi.
B
E
(A3.1’)
t
(2”) E
(A3.2’)
0
(A3.3’)
B 0
E
(4”) B 0 J 0
(A3.4’)
t
(3”)
Come si nota, le uniche sorgenti esterne previste nelle equazioni locali di Maxwell sono le
densità volumetriche di carica e le densità di corrente. Altri tipi di sorgenti (cariche
puntiformi, lineari o superficiali, ovvero correnti laminari ecc.) determinano singolarità
nelle relazioni differenziali; se ne può tener conto nelle relazioni integrali, che danno
luogo a condizioni di raccordo alla frontiera dei sottodomini all’interno dei quali i campi
sono continui e derivabili (vedi oltre).
Nel caso di moto stazionario di cariche in migrazione ( ad es. in un conduttore
filiforme), non vi è variazione media della carica in moto in ogni volume; in ogni punto è
costante la velocità v di migrazione (non considerando il moto di agitazione termica e il
moto vario nell’intervallo tra due interazioni2. Si può quindi ritenere che sia nulla, in
media, la risultante delle forze che agiscono sulla carica q in movimento, nel nostro caso la
2
per il rame tale tempo è dell’ordine di 10 -14 s
forza qE nel senso del moto ed una “forza d’attrito equivalente” –kv diretta in senso
opposto alla prima. In un circuito semplice (ad esempio una regione di spazio di forma
anulare), il campo velocità di migrazione delle cariche ha linee di flusso anulari e tutte
orientate in senso orario o antiorario. Quindi la circuitazione del campo di velocità v e del
campo di corrente J=v non può essere nulla, ossia il campo di corrente stazionaria non
può essere conservativo. Poiché il moto di migrazione è non è vario e il campo
equivalente d'attrito è sempre opposto al senso del moto, il campo di forze sulle cariche ed il
relativo campo elettrico complessivo (che, si ricorda, è la forza applicata alla particella riferita
alla carica della particella) non possono essere conservativi3.
Il sistema di equazioni differenziali di Maxwell si presta a soluzioni analitiche dirette solo
in alcuni casi (ad es. propagazione di onde piane).
Dal punto di vista generale occorrerà considerare che le equazioni di Maxwell sono
differenziali nello spazio e nel tempo e quindi occorrerà conoscere (vedi oltre) le
condizioni al contorno del dominio di indagine (o le condizioni all’infinito, nel caso di
domini illimitati) e le condizioni iniziali.
3
Poiché il campo elettrico derivante da una distribuzione di cariche elettriche è conservativo, ne discende
che un moto stazionario di cariche non può essere generato da una distribuzione (fissa) di cariche. Occorrerà
quindi considerare una sorgente di campo elettrico non di tipo elettrostatico, chiamato campo elettromotore. Il
campo elettromotore è quindi un campo di forza specifica, di natura meccanica, chimica, elettrica …. ma non
elettrostatica (trattandosi di campo non conservativo), che agisce sulle cariche tenendole separate in un
mezzo conduttore e consentendo per esse un moto stazionario (o anche non stazionario). In un circuito
semplice interessato da corrente stazionaria, ci deve essere almeno una parte (tratto generatore) in cui il
campo elettromotore è diverso da zero; l'eventuale parte complementare, in cui il campo elettromotore è
nullo, prende il nome di tratto utilizzatore. Nel tratto utilizzatore la forza specifica sulle cariche è quella
derivante dalla distribuzione di cariche (causata a sua volta dal campo elettromotore) ed è quindi un campo
a potenziale: nel tratto utilizzatore la tensione elettrica (integrale del campo elettrico) valutata tra due punti
non dipende dalla curva di integrazione ma solo dagli estremi di integrazione (all'interno del tratto
generatore, viceversa, la tensione dipende dalla curva scelta). Se quindi il campo elettromotore è diverso da
zero solo in una parte del circuito semplice, di sezioni estreme A e B, la tensione V AB sarà indipendente dalla
curva scelta solo a patto di non "entrare" nel tratto generatore. Le sezione A e B individuano quindi i confini
tra un "bipolo generatore" - identificabile attraverso una caratteristica V-I valutata all'esterno del tratto
generatore - ed un "bipolo utilizzatore" in cui non vi sono vincoli per la valutazione della tensione.
Appendice A4
CENNI SULL’APPROSSIMAZIONE QUASI STAZIONARIA
In generale, la tensione fra due punti A e B è definita in funzione della linea prescelta per
l’integrazione del campo.
La differenza tra due tensioni valutate tra A e B lungo due linee diverse γ’ e γ” è pari alla
circuitazione del campo elettrico lungo la linea chiusa γ unione di γ’ e di (-γ”), quindi
all’opposto della variazione del flusso del campo magnetico concatenato con la linea γ,
orientata congruentemente a γ’.
(A4.1)
'
"
VAB
VAB
E t dl
d
B n dS
dt
S
Abbiamo definito il campo quasi-stazionario nel caso che tale differenza sia trascurabile per
le applicazioni che interessano , es. sia inferiore al 5% rispetto al valore della tensione4. Se
ad esempio, spostando la linea di integrazione nello spazio di nostro interesse , si ha come
'
"
VAB 96V
casi estremi, VAB 100V
possiamo dire che, per le tolleranze adottate, le due tensioni hanno differenza trascurabile
e quindi si può considerare un solo valore della tensione (con l’approssimazione del 5%).
Dalla (A1.1) ricaviamo anche le condizioni in cui la differenza tra le tensioni è trascurabile;
facendo riferimento al regime sinusoidale; infatti, posto e considerato che
B(t ) BM sin 2ft B
(A4.2)
'
"
VAB
(t ) VAB
(t )
*
VAB
max
max
2fBM S
fBM S
dove γ* è una qualsiasi linea tra A e B “compresa” tra γ’ e γ” e S γ è una superficie
“ragionevole” definita da γ* e γ’ (o γ”), la condizione di quasi stazionarietà si raggiunge
sicuramente se è verificata almeno una di queste condizioni:
a)
la variazione del campo magnetico (la frequenza, ovvero la massima frequenza
ipotizzabile in una scomposizione temporale) è sufficientemente bassa;
b)
il campo magnetico è sufficientemente modesto;
c)
la regione di interesse è sufficientemente ristretta.
Analogamente , se consideriamo le sezioni terminali S A ed SB di un tratto di materiale
conduttore immerso in un isolante, in condizioni di corrente quasi-stazionaria avremo per
ogni intervallo temporale una variazione “trascurabile” di carica nel volume di conduttore
considerato, ossia una intensità di corrente di uguale valore (assoluto) attraverso le due
sezioni terminali. Facendo ancora riferimento ad un caso di regime sinusoidale, si potrà
dire dalla (A1.4)
4
Questa approssimazione viene denominata quasi-stazionaria elettrica.
E (t ) EM sin 2ft E
I A t I B (t ) max
(A4.3)
J n d
max
B
2
f
E
sin
2
ft
0 0 2fEM
n d
0
0
M
E
2
max
I max fEM
La condizione di quasi stazionarietà si raggiunge sicuramente se è verificata almeno una
di queste condizioni5:
d)
la variazione del campo elettrico (la frequenza f, ovvero la massima frequenza
ipotizzabile in una scomposizione temporale) è sufficientemente bassa;
e)
il campo elettrico è sufficientemente modesto;
f)
la regione di interesse, di superficie laterale Σ, è sufficientemente piccola, ovvero le
due sezioni sono abbastanza ravvicinate.
Le condizioni espresse dalle (A3.2) ed (A3.3) possono essere riscritte come:
*
VAB
*
B
max
E t dl
A
I max
E *d *AB fBM S
max
B
B*
t dl 2 r* fEM
0
0
da cui, introducendo la lunghezza d’onda associata al campo variabile6, la “dimensione” Δ
della regione di interesse, si ricava
d *AB
I max
fBM S
E
*
; S d *AB , f
c
cB
1 M * k '
E
B
B*
t dl 2 r* fEM ; r2
0
0
B*
c
2 r* EM r2 r* k "
0
Si nota una condizione comune ai due casi: la regione di interesse deve essere piccola
rispetto alla minima lunghezza d’onda associabile con i campi variabili. Ad esempio, alla
frequenza f=50 Hz, la lunghezza d’onda è di (3 108/50) metri, ossia 6000 km: è ragionevole
pensare che la condizione di quasi stazionarietà è rispettata se consideriamo l’intera rete
di distribuzione dell’energia elettrica in Italia.
Tuttavia le quantità k’ e k” sembrano giocare ruoli contrapposti.
5
6
In questo caso l’approssimazione viene denominata quasi-stazionaria magnetica.
Si ricorda che il prodotto tra la frequenza e la lunghezza d’onda è pari alla velocità di propagazione (della
luce corrispondente) nel mezzo.
Per un approccio più ingegneristico, inquadrabile nella Teoria Generale dei Modelli, al
modello quasi-stazionario elettrico (QSE), quasi stazionario magnetico (QSM), quasi
stazionario di corrente (QSC) – laddove le due relazioni siano contemporaneamente
verificate in modo “abbastanza” soddisfacente, vedasi
L. DE MENNA: Elettrotecnica - ed. Pironti, Napoli 1998
dove si perviene in ultima analisi alla definizione “quasi-stazionaria” del condensatore
(QSE), dell’induttore (QSM), del resistore (QSC).
Appendice A5
MODELLI DI CONDUZIONE NEI SOLIDI E NEI LIQUIDI
La conduzione elettrica nella materia (ossia il moto medio di portatori di carica, rispetto
ad un riferimento di laboratorio, esprimibile in termini di densità di corrente o di intensità
di corrente) è descrivibile in termini di:
a)
tipi di portatori di carica:
b)
proprietà chimico-fisiche del “materiale” (o dei materiali) sede del fenomeno di
conduzione;
c)
caratteristiche spazio-temporali della sollecitazione “macroscopica” sui portatori
di carica (consideriamo in questa sede principalmente la sollecitazione di tipo “elettrica” 7).
Per quanto riguarda i portatori, è tradizionale il riferimento agli elettroni, agli ioni, alle
“lacune”.
Occorre tuttavia associare a tale riferimento qualche riflessione di base. Ad esempio, per
l’elettrone potremmo assumere uno dei seguenti modelli:
1)
l’elettrone è considerabile come una sfera carica8 obbedente alle leggi della
meccanica classica (modello di Drude o modello a “palla di biliardo”);
2)
l’elettrone è un oggetto quantico libero, senza interazione con il mezzo in cui si
muove, salvo alla sua frontiera (modello di Sommerfeld o modello dell’elettrone libero in
un pozzo di potenziale);
3)
l’elettrone è un oggetto quantico sottoposto all’azione del mezzo in cui si muove,
che però ha solo un ruolo passivo (modello energetico a bande);
4)
l’elettrone è un oggetto quantico sottoposto all’azione del mezzo in cui si muove
con cui interagisce (modello di Bardeen, Cooper e Schrieffer).
E’ palese che non esiste una separazione netta tra i diversi modelli; di essi si dà un breve
cenno nel seguito, rinviando per un’approfondita analisi dei suddetti modelli alla amplia
bibliografia in merito.
Considerando per semplicità lo spazio (occupato da un mezzo qualsiasi omogeneo)
tra due elettrodi piani e paralleli A e B a distanza L, sottoposti alla tensione V AB. Tale
spazio è interessato da un campo elettrico di intensità E= VAB /L. Un elettrone viene quindi
sottoposto all’accelerazione nella direzione del campo
e
a E
(1)
m
7
Non trascurabili, tra gli altri, i casi di moto medio di portatori soggetti principalmente a fenomeni di trasporto
meccanico (le correnti di convezione, legate ad esempio alle cariche statiche accumulate in dispositivi rotanti oppure ai
moti vorticosi di aggregati carichi durante i temporali ).
8
massa a riposo me=9,109 10-31 kg; carica e=-1,602 10-19C
L’interazione con il mezzo materiale viene schematizzata con il termine “urto” (elastico o
anelastico). Se consideriamo il tempo medio tra due urti successivi (tempo di volo),
potremo valutare la velocità media di migrazione (velocità di drift) degli elettroni con una
espressione del tipo9
1
e
a
E E
(2)
2
2m
ove rappresenta la mobilità degli elettroni.
Per ottenere la velocità effettiva dell’elettrone occorrerebbe considerare la velocità u
legata all’agitazione termica, di valore estremamente più elevato rispetto alla velocità di
drift10; il libero cammino medio λ tra due urti successivi dipenderà praticamente solo dalla
velocità di agitazione termica
v D u u (3)
vD
Considerando un fascio collimato (equivalente) di elettroni di densità Ne caratterizzato da
una velocità di drift vD, potremo considerare il rapporto la carica elettrica (riferita al
tempo t di osservazione) attraversante una sezione elementare ortogonale al fascio e
l’area della sezione stessa; otteniamo in tal modo la densità di corrente elettrica e la
cosiddetta “legge di Ohm alla grandezze specifiche”:
N e2
N e2
J N e e vD e
E e
E E (4)
2me
2 me u
dove è la conducibilità del mezzo in esame:
e ( N e e)
(5)
La conducibilità risulta quindi legata al prodotto di due fattori (mobilità e densità). Nel
caso dei conduttori metallici prevale la densità, nel caso dei semiconduttori prevale la
mobilità.
Considerando la classica espressione dell’energia cinetica per l’elettrone
1
3
We me u 2 k B T (6)
2
2
(dove T è la temperatura assoluta e kB=1.28 10-23 J/K la costante di Boltzmann), si ricava il
valore della velocità u e della conducibilità
3k B T
(7)
u
me
si considera la media tra la velocità finale (prima del nuovo “urto”) e la velocità iniziale subito dopo l’urto precedente
(velocità che si suppone trascurabile rispetto a quella finale)
10
in un conduttore di rame di un ordinario impianto elettrico industriale, la velocità di drift dell’elettrone è tipicamente
di 5 10-3 m/s per un campo di 1 V/m, mentre la velocità di agitazione termina è dell’ordine dei chilometri al secondo.
9
Nee2
2 3k B mT
(8)11
In generale il moto degli elettroni in un mezzo può essere valutato considerando
quest’ultimo come un fluido “viscoso”
dv
m v e E (9)
dt
Nel caso di “viscosità dominante” il termine dv/dt è trascurabile e ritroviamo la (2) con il
parametro di viscosità pari ad 1/.
§A5.1 Conduttori metallici
Il modello a palla di biliardo fu introdotto per i metalli da Drude (1902)12. Esso è un
modello rozzo ma efficace per ritrovare alcune leggi fondamentali quali la legge di Ohm e
la legge di Joule. In esso, si considerano due tipi di interazione:
a)
l’interazione elettrone-materia descritta da una “sezione d’urto” equivalente
all’interazione di palle di biliardo di diversa dimensione;
b)
l’interazione elettrone- campo elettrico13 che determina il libero cammino medio, il
tempo di volo dell’elettrone e gli scambi energetici.
Nel modello dell’elettrone libero in una buca di potenziale, introdotto da Sommerfeld nel
1928, l’elettrone si muove in una regione a potenziale costante delimitata da frontiere che
non permettono all’elettrone di allontanarsi (barriere di potenziale, dello spessore di
qualche Å). Non è prevista l’interazione tra elettroni.
Notevolmente complessa è d’altra parte l’analisi su base quantistica delle interazioni tra
elettroni liberi e nuclei di un reticolo cristallino (es nel rame e nell’alluminio). Constatata
la dipendenza della resistività dalla temperatura (vedi oltre) e considerata la scarsa
incidenza sulla temperatura dello stato energetico degli elettroni, si ritiene determinante
lo stato energetico (vibrazionale) dei nuclei del reticolo, cioè la loro “temperatura”; la
probabilità di interazione con gli elettroni (e quindi il “tempo di volo” di un elettrone tra
due successive interazioni) cresce con l’ampiezza delle vibrazioni e quindi con la
temperatura del reticolo. Tale tesi può non trovare più riscontre a temperature molto
basse, laddove impurità e imperfezioni del reticolo potranno giocare un ruolo importante
ai fini della conduzione elettronica.
In realtà la dislocazione dei nuclei del reticolo determina una distribuzione periodica del
potenziale (che non potrà quindi avere un’unica “buca”); possono essere considerate, nel
11
Se invece della velocità di migrazione media aritmetica avessimo considerato la velocità media statistica, il fattore ½
nella (8) sarebbe diventato 8/(3π). La (8) fornisce valori della resistività a temperatura ambiente ragionevolmente
confrontabili con i dati sperimentali.
12
Si formulò l’ipotesi di un “gas perfetto” di elettroni (H.A. Lorentz,1909), con distribuzione di velocità di MaxwellBoltzmann, che non trova che pochi riscontri nel modello classico: non si ritrova né nella ripartizione di energia né nella
valutazione del tempo di volo. Occorre un approccio quantistico (Fermi,1926).
13
in realtà occorre considerare anche l’azione del campo magnetico B sulla “corrente” elettronica di densità J. Gli
elettroni saranno deviati e si potrà rilevare un accumulo sulla frontiera; sui due lembi di una striscia interessata dal
campo di corrente si viene a determinare un campo elettrico trasversale EH=RH(JxB) (effetto HALL, con RH costante di
Hall, dipendente dal materiale)
rispetto del principio di esclusione di Pauli, “bande” di energia degli elettroni utili per la
conduzione (bande di conduzione), in cui la densità degli stati ammissibile è diversa da
zero, intervallate da bande “proibite” (bande di valenza), in cui la densità degli stati
ammissibili è zero. La posizione della energia di Fermi determina la proprietà di
conduzione. A temperatura diversa dallo zero assoluto, l’ampiezza 4kT determina la
probabilità di avere elettroni disponibili per la conduzione, anche se l’energia di Fermi
ricade in una banda proibita. Quando alcuni elettroni delle bande di valenze “migrano”
nella banda di conduzione, possono lasciare l’atomo creando una “lacuna”, cioè
l’equivalente di una carica positiva pare a quella dell’elettrone. La lacuna può essere
colmata da un elettrone di un atomo vicino; si ha quindi uno spostamento di lacuna e cioè
un’equivalente moto di carica positiva.
§A.5.2 Resistività
Nel caso di un tratto A-B di conduttore filiforme omogeneo a sezione costante S di
lunghezza lAB e a temperatura costante ed uniforme, si valuta che la resistenza R del tratto,
è proporzionale alla lunghezza lAB ed inversamente proporzionale alla sezione S. Il
coefficiente di proporzionalità costituisce la resistività (si indica con la lettera greca eta- oppure -rho- e si misura in ohm per metro [m]); il suo inverso viene chiamato
conducibilità (si indica con la lettera greca -gamma- oppure -sigma- e si misura in
siemens/metro[S/m])
La resistenza di un resistore può essere in generale vista come il prodotto di un
termine “geometrico” e di un termine “fisico” ossia legato alle proprietà fisico-chimiche
del materiale ed alle sue condizioni di impiego
La resistività dei materiali può variare di numerosi ordini di grandezza, portando
alla distinzione “convenzionale” (spesso impropria) tra materiali conduttori,
semiconduttori ed isolanti
Le caratteristiche di conduzione di un materiale omogeneo ed isotropo sono in genere
sintetizzate nella relazione costitutiva tra campo elettrico E e densità di corrente J:
E=J
Il coefficiente prende il nome di resistività elettrica, il suo inverso prende il nome di
conducibilità elettrica.14 Tali coefficienti possono essere costanti al variare delle grandezze
di campo: in tale caso si parlerà di materiali conduttori lineari. Ovviamente possono
esserci, oltre al caso di comportamento non lineare, anche il caso di caratteristiche
isteretiche in cui la conduzione dipende anche dalla storia subita dallo stesso materiale. Le
dimensioni di tali coefficienti sono
Spesso vengono usati i simboli e rispettivamente per la resistività e la conducibilità. E’ opportuno ricordare (ed
evitare confusioni) che tali simboli vengono anche utilizzati per una distribuzione volumetrica e superficiale di carica.
14
E
V /m
m ( ohm metro)
J
A / m2
1
1 / m S / m ( siemens / metro)
Per i materiali metallici, la resistività è valutata in base a parametri congrui con
applicazioni ordinarie, come le linee di alimentazione. Va fissata ad esempio una
temperatura di riferimento o (in genere 293 K ossia 20°C), in quanto la resistività varia
con la temperatura del conduttore, il cui valore a regime è dipendente a sua volta sia
dalla temperatura ambiente che dalla intensità di corrente che interessa il conduttore
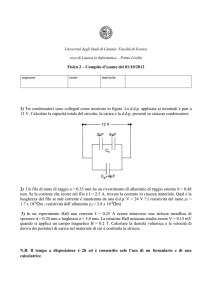
(effetto Joule). Per i conduttori metallici la resistività aumenta linearmente con la
temperatura in un ampio intervallo di valori della stessa (fig.1)
o 1 o
o
fig.1
Il coefficiente di temperatura rappresenta quindi la variazione relativa di resistività per
salto unitario di temperatura. Anche dipende da o.
In tab.I vengono riportati i valori della resistività e del coefficiente di temperatura alla
temperatura di 293 K per i materiali di più comune impiego. I valori sono riportati in
modo da indicare anche la resistenza per unità di lunghezza di un conduttore rettilineo
della sezione di 1 mm2:
Il valore 1 cui corrisponderebbe un valore nullo di resistività vale
1 0
1
o
Per il rame 1 assume il valore di circa 43K. A tale temperatura, in realtà, il rame
presenta una resistività significativa: siamo oltre l'intervallo di linearità.
A temperature molto basse, inferiori in genere a 10 K, possono manifestarsi, per
alcuni metalli in particolari condizioni di funzionamento, fenomeni di superconduttività, in
cui la resistività scende al valore "nullo", al disotto dei valori correntemente misurabili.
Per alcuni materiali si manifesta anche un crollo dei valori resistività anche a temperature
prossime alla liquefazione dell'azoto (77K). Tale fenomeno (superconduttività ad alta
temperatura) è attualmente oggetto di intensi studi, in vista di interessanti applicazioni nel
settore elettrotecnico.
Resistività -o=293 K
MATERIALI
[ mm2 /m ][ m]
Conduttori
metallici
argento
rame puro
rame industriale
oro
piombo
alluminio puro
0.016
0.017241
0.0178
0.024
0.022
0.028264
0.03
0.055
0.063
0.1
alluminio commerciale
tungsteno
Zinco
ferro
Leghe
Ottone
Manganina
Costantana
Nichel-Cromo
Ferro-silicio
lamierini
0.07
0.45
0.5
1.1
per 0.3
coefficiente
temperatura
(o)[ K ]
-1
di
Conducibilità
-o=293 K [MS/m]
3.8 10-3
3.9 10-3
3.9 10-3
3.4 10-3
3.9 10-3
3.7 10-3
3.7 10-3
4.5 10-3
3.7 10-3
4.5 10-3
62
58
1.5 10-3
1.5 10-5
2 10-5
1 10-4
4 10-3
12
-0.5 10-3
-0.5 10-3
0.1
0.02
36
16
8
0.9
Conduttori non metallici
Elettrografite
Carbone (lampade
arco)
Elettroliti
Acqua di mare
Terreni
umidi
sabbiosi
rocciosi
Semiconduttori
germanio
silicio
Isolanti
Acqua distillata
Porcellana
Vetro
10
ad70
3 105
106-107 (≡1-10Ωm)
108
(≡100Ωm)
>109
(≡1 kΩm)
107
108
(≡10Ωm)
(≡100Ωm)
1010
1010
1016
(≡10 kΩm)
(≡10 kΩm)
(≡10 GΩm)
§ A5.3 Resistività superficiale
La resistività superficiale viene definita per elementi di copertura di piccolo spessore
(es. vernici) considerando il rapporto tra la resistività (ordinaria, di volume) e lo
l
l
spessore del provino; dalla relazione R
si ricava che la resistività
s
b
b
superficiale può essere letta come la resistenza di un resistore “a piastrella quadrata”
di spessore δ. La resistività superficiale si misura quindi in [] o meglio in []/
(ohm su quadratino). La misura di resistività superficiale può dare ad esempio
direttamente la misura dello spessore del rivestimento (coating), conoscendo le
caratteristiche di volume del rivestimento. Ad esempio un “velo” di alluminio di 0.1
mm di spessore determina una resistività superficiale di circa 2,5 μΩ, un velo di
grafite dello stesso spessore presenta una resistività superficiale di 1 mΩ. La
conducibilità superficiale è il suo inverso [S].
Per componenti in materiale omogeneo di notevole spessore, ma con “velo”
superficiale naturale ovvero formatosi per idrolisi od altro processo dovuto al
contatto con altro materiale, si può procedere alla misura di resistenza tra due
elettrodi a coltello di larghezza 1 cm, posti sulla superficie alla distanza di un
centimetro. Dal confronto tra il valore di resistenza così trovato ed il valore
calcolabile con la resistività di volume del materiale, si può avere una stima del crollo
di resistività (media di volume) del “velo” superficiale.
Si riporta il confronto, per materiali tipicamente considerati isolanti, tra la resistività
di volume e la resistività superficiale (detta anche resistenza specifica di isolamento
superficiale)
Materiale
Resistività di volume
Resistività superficiale
[Ωm]
[Ω/ ]
Vetro
1011-1014
106-1012
Porcellana
1012-1013
109-1012
Ebanite
1013-1016
109-1015
Mica
1011-1013
109-1012
Quarzo
1017
108-1012
§A5.4 Prove meccaniche e tecnologiche
Prova a trazione
In tali prove vengono determinati i limiti di elasticità, snervamento e rottura, in particolare
il modulo di elasticità, l’allungamento a rottura e lo strozzamento.
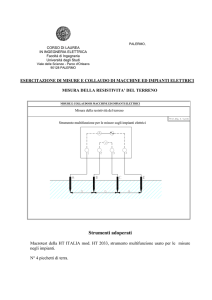
Il provino ha la forma standard indicata in fig.1
Ao
Ao
do
Ao
Lo
Si equiparano le prove a sezione diversa con quelle del provino di diametro
d 0 1.13 A0
Il provino si classifica corto se l0 5d 0 oppure lungo se l 0 10 d 0
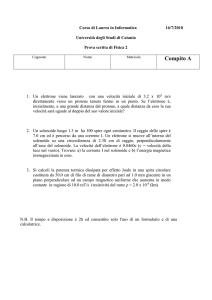
In fig.2 si riporta il risultato di una tipica prova di trazione. Sull’ascissa è riportato
l
l’allungamento percentuale % 100 , sulle ordinate la tensione media di trazione
l0
F kp
A0 mm2
F kp
A0 mm2
S
B
E
P
A
%
δ
l
100
l0
Il tratto A costituisce la zona di elasticità, il punto P il limite di proporzionalità; in tale
regione la deformazione è proporzionale allo sforzo
1
Y
Y rappresenta il modulo di elasticità e corrisponderebbe alla tensione necessaria (in regime
elastico) ad avere un raddoppio della lunghezza (=1).
Il punto S rappresenta il limite di snervamento,oltre il quale si verifica un marcato
allungamento del provino, anche con (piccola) riduzione della tensione.
La zona tra P ed S è ancora di elasticità, ma non di proporzionalità, per cui si definiscono
anche dei punti caratteristici; ad esempio σ0.2 rappresenta la tensione per cui si ha un
allungamento “extra” del 2%, in assenza di snervamento
Il punto B definisce il limite di stabilità; non può essere applicata al provino una tensione
maggiore di
σB; un qualsiasi allungamento porta inevitabilmente al collasso, che si
verifica ad un allungamento δ (lunghezza relativa di rottura), con una corrispondente
valore residuo della tensione; alla rottura si indica la sezione attraverso il coefficiente di
strozzamento.
I valori massimi della tensione in zona elastica vanno da 100 kp/mm2 per l’acciaio indurito
in olio, a 20 kp/mm2 per la ghisa, a 15 kp/mm2 per il rame tenero, a 12 kp/mm2 per
l’alluminio laminato a caldo. Gli allungament a raootura vanno da circa il 10% per l’acciaio
al 50% per il rame tenero.
La validità dei valori riportati dpendono dalla ripetività delle prove, dal controllo della
temperatura (all’aumentare della temperatura mediamente diminuisce la tensione a
rottura ed aumenta l’allungamento a rottura) e dal tempo di esecuzione della prova.
Le prove di durezza consistono nel valutare la deformazione ottenute premendo con una
forza F il provino con un altro corpo (sfera d’acciaio, metodo Brinnel; punta di diamante a
cono, metodo Rockwell; punta di diamante sfacciata con angolo diedro, metodo Vickers).
La prova del colpo di taglio consiste nell’applicare una forza in corrispondenza della
sezione ridotta opportunamente ricavata in un provino.
Le prove metallografiche consistono nell’esame macroscopiche e microscopiche di
materiali soggetti ad attacchi corrosivi.
Alcune prove non distruttive consentono l’esame di proprietà e difetti di materiali senza
comprometterne l’integrità:
- esperienze ed osservazioni con raggi X ed raggi γ;
- prove con ultrasuoni;
- prove elettriche e magnetiche ( correnti parassite indotte e scariche parziali).
§A5.5 Classificazione dei materiali per siderurgia
Materiali ferrosi :
- ferro
- acciai legati (speciali proprietà, magneti permanenti, ferro
dolce)
-acciai non legati (per costruzioni, acciai compensati)
- ghise
Materiali non ferrosi:
- materiali d’uso:
- materiali pesanti (rame, piombo, nichelio, zinco, stagno)
- materiali leggeri (Alluminio, magnesio, titanio)
- materiali nobili (mercurio, oro, argento, platino)
- arricchitori d’acciaio (manganese, wolframio, molibdeno,
cobalto, cromo, vanadio);
-materiali per leghe (cadmio, antimonio, arsenico, berillio)
Caratteristiche dei non metalli: buona conducibilità termica ed elettrica; buona resistenza
alla corrosione, buona lavorabiltà; prezzo elevato (per estrazione e trasporto).
Scelta dei materiali per linee di alimentazione
Requisiti elettrici: bassa resistività , basso coefficiente di temperatura , possibilità di isolamento del
conduttore.
Requisiti meccanici: elevata resistenza alla trazione, comportamento "elastico", resistenza alla torsione
ed al piegamento, durezza (per i contatti), resilienza.
Requisiti termici: conducibilità termica elevata, coefficiente di dilatazione termica bassa; alta
temperatura di fusione, saldabilità
Requisiti tecnologici: malleabilità, duttilità
Requisiti chimici: assenza di reazioni con altri metalli, non corrodibilità
I materiali più comunemente impiegati per linee aeree sono il rame e l'alluminio (e sue leghe). Il
rapporto di impiego rame/alluminio si va attualmente abbassando. La produzione dell'alluminio si
aggira intorno a 3 106 t/anno.
L'ALLUMINIO
Grado di purezza
Alluminio
Alluminio ricotto
Alluminio puro
puro
da fonderia
elettrolitico
99.99%
99.95 %
99.5%
Resistività -o=293 K
[ mm2 /m ][ m]
Conducibilità
0.0278
0.028264
36.0
35.4
-o=293 K
[MS/m]
Le prestazioni meccaniche sono piuttosto modeste, inferiori anche a quelle del rame.
Le caratteristiche chimiche sono abbastanza buone: si forma uno strato superficiale di ossido autoprotettivo
isolante. In presenza di metalli nobili e di umidità si decompone.
Caratteristiche tecnologiche
cristallo
densità
cubico a facce centrate
2700
punto di fusione
conducibilità termica
conducibilità elettrica
coeff di temperatura della resistività
660
0.5
36
0.0041
resistenza a trazione
2-4
max allungamento %
modulo di elasticità
30-35
7250
3
kg/m
°C
Cal/cm s K
MS/m
-1
K
kg/mm2
%
kg/mm2
L’alluminio
- non si presta ad essere formato per fusione a causa della facilità ad assorbire ossigeno;
- si presta ad essere lavorato in diversi modi sia a freddo che a caldo; si può ridurre a fili sottili o a fogli fino
a 0.004 mm di spessore (armature per condensatori)
La temperatura di riformazione è circa 500°C, quella di ricristallizazione circa 300°C.
- La saldatura è notevolmente difficile a causa della presenza dell’ossido superficiale che fonde a
temperature elevate.
LEGHE DI ALLUMINIO
L'alluminio viene anche formato con i seguenti elementi (si riduce sempre la conducibilità
appresso indicati in percentuale rispetta alla conducibilità del rame campione)
Aldrey
Al+(Si,Mg)
Anticorodal
(anticorrosiva)
Al+Si(1%)+Mg(0.6%)+Mn(
0.3%)
=87%;
ai valori
=30-35 kg/ mm2
Svantaggi dell'alluminio:
1) solidità meccanica più bassa
2) collegamenti più difficili
3) più alta propensione alla corrosione
4) a parità di resistenza, diametro maggiore
In tab 2 è riportato il confronto tra le caratteristiche di conduttori di pari resistenza e diversa natura
Tab.2
Sezione
diametro
peso
Rame
100
100
100
Alluminio
160
127
50
Aldrey
180
135
55
Zinco
340
184
265
Ferro
800
284
700
IL RAME
Il reticolo del rame è cubico a facce centrate. Dimensione del nucleo 0,01 pm, distanza tra i nuclei 300 pm
Le prestazioni meccaniche sono piuttosto modeste rispetto a quelle dell’acciaio; il limite di snervamento si
attesta intorno ai valori di = 2224 kg/mm2; il carico di rottura non supera comunque i 38 kg/ mm2. Tali
valori decrescono con la temperatura.
Le caratteristiche chimiche sono abbastanza buone: si forma uno strato superficiale di ossido autoprotettivo
o di carbonato Cu2(OH) 2C03 autoprotettivo.
Caratteristiche tecnologiche del rame. Le caratteristiche meccaniche dipendono dal tipo di lavorazione
subito dal materiale.
cristallo
densità
cubico a facce centrate
8890
punto di fusione
conducibilità termica
conducibilità elettrica
coeff di temperatura della resistività
1083
0.0934
58
0.00428
resistenza a trazione
6
max allungamento %
modulo di elasticità
45
12750
3
kg/m
°C
Cal/cm s K
MS/m
-1
K
kg/mm2
%
kg/mm2
Il rame
- non si presta ad essere formato per fusione, in quanto ad alta viscosità;
- è altamente duttile e quindi si presta ad essere lavorato per stampaggio sia a freddo che a caldo; per
lavorazioni a freddo si possono avere variazioni della sezione del 90%.
- la saldatura con piombo e stagno è ottima; non è saldabile con l’alluminio.
Va ricordato l’impiego del rame, oltre che nelle condutture elettriche (in ragione dell’alto valore della
conducibilità, della resistenza alle intemperie ed alla corrosione), nelle apparecchiature chimiche (per le
caratteristiche di stabilità chimica e di formabilità) e nella galvanotecnica (in ragione della posizione nella
scala di elettronegatività) .
Il rame ad alta purezza può essere ottenuto in presenza di ossigeno (rame elettrolitico 99.9% - rame raffinato
99.5%) o in assenza di ossigeno (elettrolitico 99.92%, raffinato 99.75%).
La presenza di ossigeno permette maggiore lavorabilità a caldo; dalle impurezze si formano ossidi insolubili
e non viene pregiudicata la conducibilità e la plasticità.
La presenza di ossigeno, tuttavia, durante la lavorazione a caldo in presenza di idrogeno, può portare a
formazione di vapor d’acqua ad elevata pressione con conseguente infragilimento del metallo.
Le norme CEI riportano i valori della resistività del rame a seconda del grado di purezza
Grado di purezza
(grado% :IACS)
(int.anneal. cupper sample)
103.5 (valore limite teorico)
100 (rame tecnico, ricotto,
internazionale)
98
97 (rame crudo)
“tipo 50”
“tipo 60”
Resistività o=293 K
[ mm2 /m ][ m]
0.0166
campione 0.017241
0.01759
0.01787
0.0195
0.0210
Conducibilità
o=293 K
-
[MS/m]
60.0
58.0
56.8
56.0
51.3
47.6
Per le condutture ordinarie si adopera il rame crudo; il rame ricotto si impiega solo per accessori (es.
giunzioni).
LEGHE DI RAME
Il rame viene anche formato con i seguenti elementi (si riduce sempre la conducibilità
indicati in percentuale rispetto alla conducibilità del rame campione)
Zinco (Zn)
Stagno (Sn)
Zn + Sn
Al/P/Mn/Be
Ni/Zn
Sn/Mg/Zn/Cd/Te/Zr
ai valori appresso
(ottoni)
(bronzo fosforoso)
(bronzi speciali)
A seconda del contenuto dei suddetti elementi distinguiamo:
- rame bassolegato (elementi presenti in misura inferiore all’1%):
a) rame all’argento: può lavorare a temperature elevate; impieghi: lamelle per collettori.
b) rame al cadmio-stagno: elevata resistenza all’usura ad arco; impieghi: lamelle per collettori.
- rame a titolo elevato (elementi presenti nella misura tra l’1% e il 5%):
a) Cu+Si(3%)+Mn(0.7-1.5%) : elevata resistenza meccanica, elevata resistenza alla corrosione, elevata
resistività.
b) Cu+Be(1.6-2.1%) : elevato carico di rottura (140 kg/ mm2); =24%;
c) Cu+Ni(1-4.5%)+Si : elevato carico di rottura (65 kg/ mm2)
- leghe di rame (elementi presenti in misura superiore al 5%):
- Ottone [Cu+Zn(10-35%)]: = 3767 kg/mm2 ; =44-27%;
- Bronzi fosforosi [Cu+Sn(2-10%)] = 3990 kg/mm2 ; =48-11%; una certa quantità viene aggiunta
per eliminare l’ossigeno presente.
- Cupronichel (Cu+Ni+Zn)+Mn(10-25%)
- Cu+Mn(12%)+Ni(4%) per resistori di precisione.
IL PIOMBO
Grado di purezza
Piombo
puro
da fonderia
da rifusione
99.985%
99.9 %
99.85%
Caratteristiche tecnologiche
cristallo
densità
cubico a facce centrate
11330
punto di fusione
conducibilità termica
conducibilità elettrica
coeff di temperatura della resistività
327
0.084
48
0.0042
resistenza a trazione
12
max allungamento %
modulo di elasticità
30
1750
Impieghi:
3
kg/m
°C
Cal/cm s K
MS/m
-1
K
kg/mm2
%
kg/mm2
placche accumulatori
mantello per cavi (per le proprietà di resistenza alla corrosione)
IL MERCURIO
Grado di purezza
Mercurio
puro
amalgama
(distillato sotto vuoto)
Metallo nobile (resistente alla corrosione)
Elevata tensione superficiale
Proprietà catalitiche
Caratteristiche tecnologiche
densità
13550
3
kg/m
punto di fusione
punto di ebollizione
conducibilità termica
conducibilità elettrica
coeff di temperatura della resistività
Impieghi:
-38.9
357
0.025
10
0.009
°C
°C
Cal/cm s K
MS/m
-1
K
contatti
MATERIALI PER RESISTORI
Per ottenere valori di resistività relativamente elevati con materiali metallici o comunque ad elevate
prestazioni, si devono considerare significative impurità e/o deformazioni del reticolo cristallino. Possiamo
distinguere due casi:
a) mescola di più cristalli di atomi diversi;
b) cristalli formati con atomi diversi (leghe).
Nel caso a), detta 1 la resistività del metallo base e 2 la resistività del metallo “intruso” di concentrazione
cz, la resistività “equivalente” può essere scritta come:
eq 11 cz 2cz 1 2 1 cz
Come si nota, la resistività è proporzionale alla concentrazione di impurità.
Nel caso b), si hanno notevoli variazioni dei valori di resistività. Nel caso di leghe a due componenti, i più
alti valori di resistività si hanno per proporzioni quasi uguali delle due componenti. Tuttavia occorre tener
conto dei legami intermetallici che modificano la struttura del reticolo.
Per le leghe risulta verificata la seguente regola di MATTHIESEN:
metallo metallo lega lega
ossia risulta costante, al variare della concentrazione, il prodotto della resistività per il coefficiente di
temperatura, per cui le leghe presentano resistività assai meno sensibile alla temperatura rispetto al metallo
puro.
A5.6 Conduttori non metallici: il carbonio
Il Carbonio si trova in due forme. La forma cristallina include il diamante e la
grafite, la forma amorfa include il carbon-black e il coke.
La maggior parte del carbonio per applicazioni elettriche è ottenuto da una miscela
di carbone in polvere o grafite e leganti (pece o resine) che vengono mescolati, estrusi e
quindi cotti a 900°C rimuovendo l’aria e i residui volatili. Il prodotto può essere convertito
in elettrografite in forni in assenza di ossigeno, a temperature superiori a 2200°C.
La resistività del carbonio ha un coefficiente di temperatura negativo (la grafite ha
un comportamento più complesso).
Il Carbonio ha molte applicazioni nei contatti striscianti:
a) deve consentire una connessione strisciante valida (dal punto di vista elettrico e
della durata);
b) deve consentire gli opportuni fenomeni di conduzione tra le superfici in contatto;
c) per impedire formazione di scariche, il contatto deve presentare una significativa
resistenza.15
Il carbonio è anche usato nelle lampade ad arco. Gli elettrodi di carbonio contengono
diversi sali metallici (calcio, cobalto,…) per variare il colore della luce dell’arco
(dall’ultravioletto all’infrarosso).
15
Si ricorda che la resistenza di contatto varia notevolmente con la pressione fra le parti
§A5.7 SOLUZIONI ELETTROLITICHE
Mentre nei metalli i fenomeni di conduzione non comportano modificazioni dello stato
chimico, ciò avviene per le soluzioni elettrolitiche.
Nel caso di presenza in un circuito di tratti costituiti soluzioni elettrolitiche siamo di fronte
a meccanismi di conduzioni differenti: prevalentemente ionica nella soluzione, elettronica
negli altri tratti.
Le differenti mobilità delle specie influenzano il comportamento delle soluzioni in regime
dinamico. I consistenti fenomeni di polarizzazione e le reazioni chimiche agli elettrodi
influenzano anche il comportamento in regime stazionario.
La conducibilità di un elettrolita è legata alla concentrazione ed alla mobilità degli ioni
positivi e negativi:
n e n e
La conducibilità di un elettrolita va misurata a frequenza abbastanza elevata (1000 Hz) per
poter trascurare l’influenza delle reazioni chimiche agli elettrodi (un resistore elettrolitico
è generalmente rappresentabile con una resistenza in serie a due capacità di valore
elevato, ad es 100 F.
All’interfaccia elettrodo-soluzione si ha quindi un trasferimento di carica, ossia una
trasformazione chimico-fisica nel corso della quale le specie presenti nell’elettrolita
accettano o cedono elettroni scambiati con il metallo. Per la conservazione della carica,
sarà dunque da considerare il processo anodico ed il processo catodico.
Ad esempio, in un processo di trasporto che veda impegnati ioni positivi sia di idrogeno
che di rame, al catodo è più agevole la cattura degli ioni rame rispetto agli ioni idrogeno
Gli elettroliti si distinguono in:
a) elettroliti forti (acidi forti e basi forti, sali in generale) (conducibilità dell’ordine di
10 S/m, sensibilmente proporzionale alla concentrazione di soluto). La deviazione
dalla legge lineare è generalmente ascrivibile alle interazioni ioniche;
b) elettroliti deboli (acidi deboli e basi deboli), con conducibilità dell’ordine di 0,01
S/m, poco variabile con la concentrazione in quanto le molecole in soluzione sono
dissociato solo in una frazione del numero totale.
Spesso viene introdotta la conducibilità equivalente , riferendo la conducibilità alla
concentrazione c. Negli elettroliti forti, per concentrazioni non basse, assume il valore
limite o, corrispondenti alla mobilità limite delle specie ioniche, mentre per
concentrazioni basse, il valore della conducibilità equivalente diminuisce per l’interazione
(di attrazione) tra le specie di segno opposto. Per elettroliti deboli, le mobilità delle specie
ioniche variano molto poco con la concentrazione, per il basso grado di dissociazione.
Anzi la misura dell conducibilità permette di valutare anche il grado di dissociazione
=/o (essendo o la conducibilità equivalente a diluizione infinita)
§A5.8 La conduzione elettrica nei semiconduttori
I materiali semiconduttori (solfuro di piombo, silicio, selenio, germanio,…) hanno
conducibilità notevolmente più bassa dei metalli. Trattasi in genere di materiali
tetravalenti con legami di valenza stabili che diventano labili all’aumentare della
temperatura, rendendo disponibili elettroni alla alla migrazione (conduzione tipo n). La
lacuna lasciata dall’elettrone può quindi spostarsi ed è equivalente al moto di cariche
positive (conduzione tipo p). La conducibilità intrinseca vale
n p e p nn e n
Aggiungendo ad un semiconduttore base (es. germanio) un elemento pentavalente (es.
arsenico, fosforo, antimonio), si ha un eccesso di elettroni disponibili per la conduzione
(portatori maggioritari), con un aumento di diversi ordini di grandezza della conducibilità
(drogaggio e conduzione tipo n); le lacune (portatori minoritari ) hanno concentrazione
molto più bassa.
L’opposto accade in caso di drogaggio con atomi trivalenti (es. boro); in questo caso la
conduzione di tipo p è prevalente (le lacune sono i portatori maggioritari).
Le giunzioni di materiali con drogaggio p ed n presentano caratteristiche di conduzione
fortemente asimmetriche e possono essere usate per la realizzazione di componenti
raddrizzatori con eventuale possibilità di controllo.
§A5.9 Materiali per isolamenti
Nelle strutture di isolamento (isolamenti solidi) si riscontrano i seguenti materiali:
-
isolanti “reali”, con caratteristiche di conduzione non desiderata, legata in genere ad
effetti termici, di campo o ad impurezze;
conduttori deboli o semiconduttori, volutamente adoperati per modificare o controllare
la distribuzione della sollecitazione elettrica (esempio negli isolatori passanti o sulle
terminazioni di cavo).
Gli isolanti presentano bande di valenze piene, separate marcatamente (W>>kT) da
bande di conduzione.
I legami fondamentali sono i seguenti:
- legame ionico, dovuto alla forte attrazione di ioni di segno opposto (es Na+ Cl- nel
cloruro di sodio;
- legame covalente, quando gli atomi hanno gli orbitali interni completi e quattro o più
elettroni sull’orbitale esterno e possono condividere questi elettroni in coppia con
altri atomi
La conduzione elettrica nei cristalli ionici può derivare dal movimento degli ioni nel
reticolo (conduzione intrinseca, che diviene importante ad alta temperatura), o anche dalla
presenza di impurità (conduzione estrinseca, che può essere significativa anche a bassa
temperatura). In un cristallo ionico “perfetto” occorrerebbero campi dell’ordine di 1-100
MV/cm per avere spostamenti degli ioni. Negli isolanti reali, movimenti ionici possono
avvenire anche con campi elettrici di intensità notevolmente inferiore: la presenza di
imperfezioni nel reticolo può agevolare il movimento degli ioni.
§A5.10 Conduzione intrinseca (negli isolanti cristallini e polimerici)
Si interpreta quindi la conduzione ionica intrinseca come dovuta a difetti di
reticolazione. I più noti difetti sono quelli di Frenkel (fig.7.1a) e di Schottky (fig.7.1b):
nel primo caso si crea una occupazione interstiziale ed una lacuna, nel secondo casomolto più frequente- si ha una migrazione ionica verso la superficie (simmetrica).
Anche in questi casi il movimento degli ioni è interpretabile come movimento di
lacune (di senso opposto alla migrazione degli ioni).
Per ricavare un’espressione per la conducibilità intrinseca, consideriamo che la
probabilità che uno ione o una lacuna migri è legata ad una “energia di attivazione” W a
sia del tipo
W
p * A exp a
kT
In presenza di un debole campo E la probabilità di uno scorrimento a (passo del
reticolo) dello ione nella direzione del campo vale, in prima approssimazione
pt* p * ( Eea / kT )
la densità di corrente, la conducibilità e la mobilità possono essere ricavate di
conseguenza
Ee2 a 2
W
*
exp a
J npt ea nA
kT
kT
e2a 2
J
W
exp a
nA
E
kT
kT
e a2
W
exp a
A
ne
kT
kT
Se la migrazione di cariche è dovuta differenti meccanismi (anche diversi da quelli
descritti), l’espressione della conducibilità tiene conto dei diversi contributi.
W
Ci exp i
kT
La conducibilità può avere diversi andamenti in funzione della temperatura. Ad esempio,
all’aumentare della temperatura, gli ioni d’impurità possono migrare più facilmente negli interstizi
e quindi aumenta in misura più marcata la conducibilita. Viceversa può accadere che le impurità
vadano a bloccare ad alta temperatura le lacune e quindi la conducibità aumenta di meno al crescere
della temperatura..
§A5.11 Conduzione estrinseca (negli isolanti cristallini e polimerici)
Tale tipo di conduzione può aver luogo per la presenza di ioni di impurità o di molecole
facilmente ionizzabili. Si può valutare che il contributo di conducibilità “estrinseca”
appare come
a 2e2
F
exp
kT
kT
d nd
dove nd è il numero di vacanze indotte dalla presenza di impurità.
Alcuni tipi di cristalli presentano conducibilità molto maggiore di quella prevista, a causa
della loro struttura complessa (es. strutture planari a diversa densità). Ad esempio nella allumina Na2 O 11Al2 O3 v’è un eccesso di NaO; gli ioni sodio occupano i piani meno
densamente disposti, mentre gli ioni O in quelli più addensati. Questa disposizione porta
ad una conducibilità molto maggiore della soluzione di NaCl. Altri cristalli che mostrano
queste proprietà sono compositi tipo RbAg4I5 e LixTiS2, utilizzati negli accumulatori (gli
ioni Litio presentano una notevole mobilità). In molti di questi casi si manifestano
evidentemente marcate anisotropie (la conducibilità non può essere rappresentata da uno
scalare).
Per esaltare la conduzione estrinseca sono da ricordare:
a)
l’impiego di sistemi multifase (vengono inclusi polveri conduttivi, grani, fibre,..);
b)
l’uso di droganti come per i semiconduttori (ad esempio il poliacetilene drogato con
ioni clorato e iodo).
Appendice A6
CENNI SUI GENERATORI DI TENSIONE STAZIONARIA16
I generatori di forza elettromotrice stazionaria si possono suddividere in:
a) generatori primari di f.e.m
b) generatori secondari.
c) sistemi con raddrizzatori (convertitori a.c./d.c. )
I generatori primari e secondari vengono detti rispettivamente pile ed accumulatori (o
pile reversibili). Il principio di funzionamento si basa sulla creazione di un campo
impresso in catene di conduttori di prima classe (elettrodi di materiali solidi diversi)
e conduttori di seconda classe (elettroliti). I simboli corrispondenti sono riportati in
fig.1 a), b).
I sistemi di raddrizzamento prevedono l'uso di elementi non lineari (diodi, diodi
controllati o tiristori), per ottenere una tensione praticamente continua a partire da
una tensione sinusoidale (fig.1,c). Essi sono largamente impiegati in ambito
industriale ( Elettronica di potenza ) e in buona parte delle utilizzazioni domestiche per
cui sia prevista la regolazione delle prestazioni. Non saranno trattati in questa nota.
+
d.c.
a.c.
E
a)
c)
b)
fig.1
I generatori primari principali sono:
- la pila Leclanchè, comunemente impiegate in commercio, f.e.m. di circa 1,5 V,
elettrodi di zinco e grafite, impiegante una gelatina di cloruro d'ammonio (NH 4CL)
come elettrolita e il biossido di manganese (MnO2) come depolarizzante;
- la pila Daniell (1836), elettrodi in rame e zinco, soluzioni di solfato di rame e
solfatp di zinco separate da setto poroso, f.e.m. pari a circa 1,09 V
- la pila Weston (1893, pila campione 1.0186 V, elettrolita CdSO4).
I generatori secondari più diffusi in commercio sono:
- accumulatori al piombo-acido
16
per maggiore approfondimento vedasi : [7] F. BAROZZI, F. GASPARINI, Fondamenti di Elettrotecnica Elettromagnetismo, ed. UTET, Torino, 1989, §III-4
- accumulatori al ferro-nichel
- accumulatori al nichel-cadmio
Altri tipi di accumulatori a prestazioni molto più elevate sono stati sviluppati per usi
spaziali, ma il loro costo resta proibitivoIn fig.1.2 è rappresentata la cella elementare con gli elettrodi, l'elettrolita, i morsetti
+
-
PbO
2
Pb
soluz. acquosa di acido solforico
fig.1.2
La f.e.m. E (uguale alla tensione a vuoto teorica ai morsetti) varia con la temperatura
e la densità dell'elettrolita (per le celle al piombo-acido di circa 100###V/K e di 100
mV per ogni 10% di variazione della densità relativa).
Ai morsetti la tensione a vuoto sarà in genere pari a E-Ep, dove la forza
controelettromotrice Ep è originata in fase di scarica da rivestimenti isolanti (PbSO4)
formati sugli elettrodi, dalla diminuzione di concentrazioni ioniche, dalla formazione
di gas liberi (H2). La f.c.e.m. dipende anche dalla intensità di corrente erogata e può
essere limitata (nei generatori primari) con particolari pre-trattamenti superficiali
degli elettrodi. Negli accumulatori i fenomeni di polarizzazione e depolarizzazione
sono connessi in modo essenziale alle fasi di scarica e ricarica.
Gli accumulatori sono oggetto di normativa del CEI 21-3 fasc 1258 (1989)
Accumulatori al piombo-acido
Gli elementi dell'accumulatore sono:
a) piastre, di spessore variabile da 1.25 mm a 20 mm circa, di piombo spugnoso
(elettrodo negativo) o di ossido di piombo (elettrodo positivo); esse sono del tipo:
- formate (Plantè) : la piastra originaria è di piombo puro, che poi viene attaccata
chimicamente per formare uno strato superficiale sottile di biossido di piombo
- impastate (Faure): su una griglia di sostegno (lega di piombo con il 4-12% di
antimonio) viene assestata una pasta di polvere di piombo con acido solforico diluito
(piastra positiva); un altro tipo di pasta viene usata per la piastra negativa; per il
funzionamento effettivo, le due piastre vengono immerse in una soluzione di acido
solforico e sottoposte a passaggio di corrente: in tal modo si avrà la piastra all'ossido
di piombo (+) e piombo spugnoso(-).
Ogni elemento (coppia di piastre) genera una f.e.m. di circa 2 V.
b) sbarre di connessione e morsetti (fig.3), realizzate in genere in lega di piombo ed
antimonio
+
fig.3
c) separatori, inseriti tra le piastre positive e negative adiacenti per evitare
cortocircuiti
d) elettrolita: soluzione acquosa di acido solforico, densità 1.2-1.3
e) contenitori in vetro, in plastica, in ebanite
Il modello di funzionamento elettro-chimico di accumulatori al piombo non è
definitivamente assestato; le diverse interpretazioni risalgono al secolo scorso e non
si sono avute negli ultimi decenni significativi progressi in materia.
Si può tuttavia ritenere che agli elettrodi avvengano globalmente le seguenti reazioni:
scarica
anodo PbO2 4 H SO4 2e
PbSO4 2 H 2 O
carica
scarica
4
catodo Pb SO
carica
PbSO4 2 e
Caratterizzazione elettrica di un accumulatore
Fase di carica:
I
r
+
V
accumulatore
caricabatteria
fig.4
La tensione ai morsetti vale
V= E + r I
e varia tra 2.1 V (accumulatore scarico) e 2.8 V (accumulatore carico), come si ricava
dalla caratteristica di carica a corrente costante (fig.5)
fig.5 Carica di un accumulatore
Fase di scarica:
r
I
R
+
V
E
accumulatore
fig.4
La tensione ai morsetti vale
V= E - r I
e varia tra 1.7 V (accumulatore scarico) e 2.0 V (accumulatore carico), come si ricava
dalla caratteristica di scarica a corrente costante (fig.5)
fig.6 Scarica di un accumulatore
Occorre precisare che l'accumulatore può danneggiarsi irreparabilmente se la
tensione scende al disotto di circa 1.7 V per elementoPer correnti più elevate, la scarica avviene in tempi decisamente più brevi.
Si definisce capacità di un accumulatore la quantità di carica elettrica (normalmente
espressa in Ah) che un accumulatore è in grado di erogare prima di portarsi al livello
minimo di tensione; la capacità nominale viene riferita ad una scarica ad un
determinato valore di corrente di scarica costante (es. 1 A). La capacità diminuisce
sensibilmente con il valore della corrente di scarica (fig.7)
fig.7 Capacità di un accumulatore in funzione della corrente di scarica
La tensione nominale di batteria dipende dal numero di elementi collegati in serie.
Così per 3,6,12,24 elementi avremo le comuni batterie da 6,12,24,48 V. Date le vicende
singole subite dai diversi componenti, che determinano valori di f.e.m. leggermente
diverse tra i vari elementi, non è opportuno collegare in parallelo gli accumulatori.
La resistenza interna di un accumulatore va definita con una certa cautela. Per una
prima valutazione, si possono indicare valori di 0,1 per accumulatori nuovi di
piccole dimensioni e valori di 0,0001 per accumulatori di grandi dimensioni.
Il rendimento di un accumulatore viene definito:
in quantità di elettricità:
ts
q
e s
qc
i dt
s
0
tc
i dt
0,90 0,95
c
0
in energia:
ts
w
w s
wc
v i dt
s s
0
tc
v i dt
0,75 0,80
c c
0
Classificazione degli accumulatori:
a) Stazionari : 900-9000 Ah
b) Trazione pesante : 100 - 500 Ah
c) trazione leggera : 50-800 Ah
d) sommergibili: fino a 12000 Ah
Manutenzione degli accumulatori:
a) la vita dell'accumulatore dipende dalla purezza dell'elettrolita; occorre quindi
evitare che venga a contatto con impurità:
b) la densità dell'elettrolita deve essere mantenuta tra 1.2 e 1.3
c) occorre evitare temperature troppo elevate (>45°C) o troppo basse (anche se
possono essere adoperati additivi per abbassare la temperatura di solidificazione)
d) evitare, durante la carica, che l'accumulatore "bolla" a lungo (ossia liberi
idrogeno, tra l'altro pericoloso)
e) evitare intense correnti di carica e scarica
f) mantenere puliti morsetti e contenitore.
Appendice A7
Magnetismo – Materiali magnetici
A10.1 - Azione tra conduttori percorsi da corrente. Introduzione “sperimentale” di B
Consideriamo, nel vuoto, due conduttori rettilinei indefiniti (fig.1) o di grande lunghezza
L, tra di loro paralleli ed a distanza d ed ambedue interessati da corrente elettrica della
stessa intensità I; tra di essi si esercita una forza (detta ponderomotrice) che, per unità di
lunghezza, vale in modulo
2
F
N
7 I
f
2 10
L
d m
(A.15.1-1)
se I è valutata in due riferimenti antiparalleli o “discordi”, come in fig.1, la forza è di
repulsione, se “concordi”, di attrazione.
La (A.15.1-1) viene utilizzata per la definizione dell’unità di misura dell’intensità della
corrente elettrica [A].
In generale, la forza ponderomotrice dF agente su elemento tds di un conduttore
interessato da corrente di intensità I nello stesso riferimento t, può essere letta come
dF I tds B
(A.15.1-2)
dove B è il campo (di induzione) magnetico, che quindi viene ricondotto all’azione
(elementare) di una corrente “elementare” (anche su scala microscopica fisica), ortogonale
sia al conduttore che alla forza; se consideriamo ancora la configurazione fig.1, vista su un
piano ortogonale al foglio, lungo una circonferenza centrata sul primo conduttore, sulla
quale si immagina disposto il secondo conduttore parallelo, B sarà sempre tangente e di
pari modulo (fig.2). Poiché un conduttore rettilineo interessato da corrente non è soggetto,
per simmetria, a forze a causa del campo proprio, si deduce, integrando la (A.15.2) su un
tratto unitario del secondo conduttore e confrontando la forza risultante con la (A.15.1-1),
B 2 10 7
I N
T (A15.1-3)
d A m
dove si è evidenziata l’unità tecnica tesla [T] a partire dalle unità fondamentali.
P
I
I
F
I
B(P)
F
d
Q
Fig. 1
Fig.2
B(Q)
Con riferimento alla circonferenza di fig 2, di raggio r=d, si otterrà che
7
B t ds 2rB 2r 2 10
I2 1
I
4 10 7 I B 4 10 7
(legge di Biot Savart)
r I
2r
B t ds I
0
Si definisce quindi la costante
0 4 10
7
2
Tm Tm / A Wb / A H
A m m m;
si può introdurre l’ intensità di campo magnetico H
H t ds
B
0
t ds I H J (17)
Per definire univocamente i campi occorre fissare la divergenza. La posizione
B 0 consente di introdurre un potenziale vettore A tale che A B .
Dalla (A15.1-2) si può ricavare la forza specifica (per unità di volume)
dF
JB
d
Conoscendo la distribuzione delle correnti nello spazio, si può risolvere l’equazione di
Poisson al potenziale vettore nello spazio vuoto (o omogeneo) ed ottenere
17
Nel caso non stazionario i campi magnetici dipenderanno anche dalle densità di corrente di spostamento.
0
4
r
H( P)
1
4
1
J Q 1
J
P
Q
r
PQ
rPQ
H( P)
1
4
rPQ
J
d Q
Q
3
r
PQ
A( P)
JQ
d Q H ( P)
PQ
1
0
A
1
4
J
P Q
rPQ
d Q 1
4
d Q
1
J
Q
r
PQ
d Q
Nel caso di circuito filiforme, interessato da corrente di intensità I, si ricava
H( P)
I
4
rPQ
t
Q rPQ3 dsQ
SPIRA CIRCOLARE
Da questa espressione si può calcolare ad esempio il campo sull’asse di una spira in aria.
Q
dsQ
rPQ
I
dH
a
α
O
dH’
P(x,0)
Fig.3
π
π
rPQ
I Q’
I
2
I
2 a
I
H ( P)
t
ds
a
sin
d
a
d
Q
Q
3
2
2
4
4 0 r
4 0 rPQ rPQ
2
rPQ
x
a2
2
a2
3
avendo considerato coppie di elementi circuitali diametralmente opposti, il campo risultante
è diretto lungo l’asse della spira (fig.3)
Al centro della spira si ha
H (0)
I
. Per una spira di raggio 1 cm, interessata da
2a
intensità di corrente di 1 A, l’intensità di campo magnetico al centro della spira vale 50 A/m e
l’induzione magnetica circa 60 T.
SOLENOIDE CORTO E LUNGO
Con le stesse considerazioni può essere calcolato il campo sull’asse di un solenoide “corto” di
raggio a (fig.4)
l
NIdx a sen NIdx a sen
dH
2
2
2r
2r
r d
1
0
a
Considerato che r=a/sen, che x=a/tg,
dx=-(a/sen2) d, si ha
2
x
P(x,0)
dx
2
3
NIad a sen NI sen
NI sen
dH
d H
d
2
2
2
sen 2a
2
1
H ( P)
2
1
NI
NI sen
cos 1 cos 2
d
2
2
Se il solenoide è lungo il campo diventa uniforme e si ha
H ( P)
NI
nI
dove n è il numero di spire per unità di lunghezza.
Indicando con S la sezione del solenoide, il flusso concatenato con una spira vale
1
NI
4a 2 nI S
Il flusso concatenato con l’intero solenoide vale
N N1
N 2I
4a 2 n 2 I
ed il coefficiente di autoinduzione del solenoide lungo vale
L
N
N2
S n 2 S
I 1
Se ad esempio la lughezza del solenoide in aria con N=300 spire è 30 cm, il diametro 5 cm, si
ha L=738 μH.
Dalla (A15.1-2) è possibile ricavare la sollecitazione meccanica su un solenoide lungo.
Considerando che il campo all’interno è uniforme e all’esterno è nullo, si può considerare
che nella zona del conduttore vi sia un campo intermedio. Quindi
dF I tds B
I 2 0 N
dF
ds
2
I 2 0 N
Fspira
a
La forza su ogn elemento della spira è diretta verso l’esterno; le spire per unità di lunghezza
sono N/L; quindi la forza esercitata sugli avvolgimenti del solenoide, per unità di lunghezza
vale
F I 2 0 N 2
a
2
con una pressione
2
F 1
I 2 0 N 2 a
I 2 0 N 2
1
2 I
p
0 n
0 H 2
2
2
S
2a 1
2 2
2
pari cuiè all’energia magnetica per unità di volume (interno).
SOLENOIDE LUNGO NON FILIFORME
Sionsideri un solenoide di lunghezza l costituito da N spire massicce di spessore δ (oppure
un gruppo equivalente di avvolgimenti stratificati in parallelo) (fig…)
l
a
0
x
δ
Il campo magnetico è costante all’interno del solenoide eè linearmente decrescente dal bordo
interno al bordo esterno dell’avvolgimento. Pertanto,
NI
0ra
l
NI a r
H"
a r a
l
H '
Il coefficiente di autoinduzione può essere calcolato valutando l’energia magnetica associata
al sistema
2
N 2a 2
N 2a 2 1
N 2 a r
2
2
L L' L" 0
2 H " 2rdr 0
2
rdr
l
l
l
I
"
"
2
N 2 2 2a
0
a
l
2
N 2
0
l
a
rdr
a
4a
2
a
r dr
2
a
2
2
a
3
r
dr
a
2 a 2
a 2 a 2 4a 2 a 3 a 3 1 2 a 4 a 4
a
2
3
2
N
2
2
2
6a 2 62a a 8a a aa a 2 3 2a a a 2
6l
N 2
0
6a 2 4a
6l
0
2
COEFFICIENTE DI MUTUA TRA SOLENOIDI SPESSI
l
R1 R1e
x
0
dr
Poiché risulta M12=M21, conviene valutare il flusso prodotto dal solenoide esterno (2),
concatenato con il solenoide interno (1). Esso viene valutato considerando pesando i flussi
conatenati con gusci elementari di spressore dr.
1e
1e
0 N1
0 N 1 N 2 1e 2
21
N2I2 2
1
M
21 (r )dr
r dr
r dr
I2
I 2 R1e R1 R1
I 2 R1e R1 R1 l
l R1e R1 R1
R
R
0 N 1 N 2 R13e R13
l R1e R1
M
3
0 N1 N 2
l
R
Req
Req
R12e R12 R1 R1e
3
Ai fini del calcolo del coefficiente di mutua induzione, il solenoide “spesso” si comporta
quindi come un solenoide sottile di opportuno raggio. Ad esempio se il raggio minimo
dell’avvolgimento interno è 4 cm e quello massimo è 10 cm, il “raggio equivalente”
dell’avvolgimento interno è di 7,2 cm.
SPIRE DI HELMHOLTZ
Si considerino due spire piane parallele in asse, a distanza 2b, interessate da intensità di
corrente I1= I2 (riferimenti congrui). Il campo magnetico risultante sull’asse z è dato dalla
somma vettoriale dei campi prodotti dalle singole spire: Il modulo del campo vale:
I
H ( z) 1
2
a2
x b
2
a2
3
I
2
2
a2
x b
2
a2
3
Al centro tra le due spire (z=0) il campo vale
I
H (0) 1
2
b
a2
2
a
2 3
I
2
2
a2
b
2
a
2 3
I1
b
a2
2
a2
3
Come si può notare nella fig…., per bassi valori del rapporto raggio/distanza delle spire,
ossia spire piccole e distanti, il campo è fortemente disuniforme; avvicinandosi le spire, il
campo sull’interasse tende a diventare sempre più uniforme.
Dalla fig… si può notare che per a/2b=1 (raggio delle spire pari alla loro distanza) il campo
non varia più del 5% nello spazio tra i due centri spira.
si può verificare agevolmente che il campo, per z=0, ha derivata prima e seconda verso z pari
a zero, quindi nell’intorno del punto z=0 lo sviluppo in serie (per la simmetria mancano i
termini dispari) vale
1 d 4H
H ( z ) H (0)
4! dz 4
z 4 ..... I
z 0
a2
2b
2
a2
3
3
2
2
I 25344 4a 2 2b 4
5
z ....
4
a 625 5
Ponendo a=b/2=1, si ottiene
H ( z ) H (0) 5
H 0
4
3
2
25344 4
z 25 z 4
625 5
a distanza di10 cm l’errore su un campo uniforme è dello 0,25%
AVVOLGIMENTO TOROIDALE
Consideriamo un avvolgimento di N spire “compatte e serrate” distribuite uniformemente su
un supporto (anche ideale) a forma di anello (toro).
Applicando il teorema della circuitazione si verifica subito che il campo ha struttura circolare
ed è nullo all’esterno dell’avvolgimento, mentre all’interno vale
H (r ) r r r
1
2
NI
2r
se il toro è sottile, possiamo considerare il campo praticamente uniforme all’interno e pari al
campo sull’asse
H ( r ) r r r
1
2
NI
NI
2r0 0
r1
r0
A
r2
B
Il flusso concatenato con le N spire vale
N 2 I S
N 2 S
N 0
L 0
2r0
2r0
Volendo valutare il flusso concatenato con l’intero avvolgimento e l’induttanza vista dai
morsetti A-B (comunque molto vicini tra di loro ed al toro), occorre tener conto anche della
spira “grande” costituita dall’elica toroidale
toro N ' LAB
N 2 S
r0
L L' 0
0 ln
2r0
2r2 r1 =
per evitare questa correzione, non sempre trascurabile, occorrerebbe “compensare” la spira
“grande” con una “controspira” come in figura. In tal caso la configurazione di campo risulta
molto più complessa.
r1
r0
r2
A
B
Se in un avvolgimento toroidale si volesse tener conto della variazione del campo con il
raggio, il coefficiente di autoinduzione potrebbe essere calcolato nel modo seguente:
b
N1 0 N
L
I
I
0 N bNI
0bN 2 r2
S HdS I r 2r dr 2 ln r1
r2
1
LINEA BIFILARE
J’
dy’
R
r’
P(x1)
0
x
r”
R
dy”
J”
d
Si consideri un tratto di lunghezza unitaria di una linea costituita da due conduttori paralleli
a distanza d, a sezione circolare di raggio R, interessati da una intensità di corrente I e quindi
da una densità di corrente
J
I
R 2
diretta come in fig.
Il potenziale vettore A può essere valutato come
A( P)
0
4
JQ
r
d Q
PQ
Poiché tutti gli elementi di corrente sono diretti secondo un solo asse (y), anche il potenziale
vettore sarà diretto lungo l’asse y
0 J'
d ' J"d "
4 r '
r"
I dy ' dy" I dy ' dy"
0
0
4 r ' r ' 4 r ' r"
I
dy '
dy"
0
2
2
4
d
d
y 2 x1
y 2 x1
2
2
A( P ) y A' ( P ) A" ( P)
y
y
d
d
d
d
I
x1
x1
2
2
0
2
2
4
y
y
1
1
x d
x d
1
1
2
2
Ponendo
A( P) y
y
x1
d
2
y
, '
, si ha
d
x1
2
d '
0 I d
4 1 2 1 ' 2
1 2
0 I
2 ln
2
4
' 1 '
0
1
1 1 2
0 I
2 ln
4
'
1 1 1
'2
0
definitiva
I
0 2 ln 1 2 2ln ' 1 ' 2
0
0
4
1
1 1 2
I
0 2 ln
'
4
1 1 1
'2
d
x1
I
0 2 ln 2
4
d x
1
2
0
In
I
A( P ) y
0
2
ln
d 2 x1
d 2 x1
sull’asse centrale è x1=0, quindi il potenziale vettore si annulla.
Dalla circuitazione del potenziale vettore magnetico lungo una linea è possibile valutare il
flusso concatenato con tale linea, ossia il flusso attraverso una qualsiasi superficie orlata da
tale linea. Si consideri ad esempio (fig…) una linea rettangolare che si appoggia alle due linee
d
( x1 R ) per un tratto di lunghezza l. Si ottiene
2
I
x
I
d
A( P) tds
0 I 2d 2R
d R
2 R 0 I
l ln
l ln
ln
2 2R
R
2d 2 R
Se ne ricava il valore dell’induttanza “interna” della linea bifilare per unità di lunghezza
0
dR
L'
ln
Il
R
Nel caso di linea sottile (R<<d) si ha
L'
0 d
ln
r
[H/m]
ad es. per R=2mm, d=30 cm l’induttanza per kilometro di linea (induttanza di servizio)
vale L’=2.0 mH/km.
Per composizione si può calcolare la distibuzione del campo risultante, in particolare
lungo x (fig…)
H
Hmin
I
x
I
d
Il campo lungo x mantiene lo stesso senso nell’intervallo (-d/2+R,d/2-R) e vale
I 1
1
I
d
H ( x)
d
2 d
2 d 2
x
x2
x
2
2
4
Il campo ha un minimo al centro ed è massimo in prossimità della linea (dove è
leggermente aumentato rispetto al caso del conduttore singolo)
2I
H min H (0)
d
I
d
I
1
I
d
H max H R
2R R d
2
2 R (d R ) 2 R (1 R )
d
All’interno del conduttore occorre considerare la somma del contributo dello stesso
(lineare con la distanza dal proprio asse) e dell’altro conduttore (iperbolico)
d2
d
x
x2 R
I 2
1
I 4
H ( x) x d R , d R
d
d
2
R
2
2
2
x
x R
2
2
che si annulla per x
d
4R
1 2 ossia poco oltre l’asse del conduttore (assi magnetici della
2
d
linea bifilare).
Volendo calcolare l’induttanza della linea bifilare, considerando anche la distribuzione di
campo magnetico anche all’interno dei conduttori, occorrerebbe suddividere il conduttore
in tanti “filetti” elementari di corrente dI e valutare il flusso del campo magnetico
concatenato il singolo filetto elementare identificato con il loro asse; si considera quindi la
media pesata (sulle correnti elementari) dei flussi così ottenuti
I
1 i i i
1
L
2 dI
I
I I i
I I
i
Risulta in genere più agevole, conoscendo la distribuzione del campo magnetico (nel caso
del vuoto o di mezzo lineare), valutare il coefficiente di autoinduzione L attraverso
l’energia magnetica
Wm
2W
1 2 1
1
LI H 2 d L 2m 2 H 2 d
2
2
I
I
Nel nostro caso, in prima approssimazione, per linee bifilari non sottili,
l d 2
1
L 2 H 2 d H 2 d 0 ln 20 H 2 d
r
I aria
I conduttore
conduttori
0 l d 2 0 R I
0l d 0l R 3
ln 2
2
l
d
ln 4 d
r
r R o
I o 2R 2
0l d 0l 0l d 1
ln
ln
r 4
r 4
2
Se ne deduce una espressione (di largo impiego tecnico) per l’induttanza per unità di
lunghezza di una linea bifilare (es. per un cavo costituito da due conduttori paralleli nella
stessa guaina)
L'
0 d 1
ln
r 4
ALCUNE CONSIDERAZIONI ENERGETICHE
Si consideria una spira interessata da corrente di intensità i1(t) erogata da un generatore di
tensione indipendente e1(t), supposto puntiforme o comunque “localizzato. In generale
nella spira nasce una forza elettromotrice indotta; considerata la “resistenza” equivalente
della spira, si postrà scrivere
E t ds1 e1
1
d1
S
J1
t ds1 i1
ds1 R1i1
dt 1
S
S
1
Moltiplicando per i1(t) per un intervallo elementare di osservazione dt si potrà mettere in
evidenza l’energia erogata dal generatore “concentrato” nell’intervallo di tempo
elementare
e1dt R1i12 dt i1d1
Anche se si considerano altre spire similari si potranno considerare bilanci analoghi e
pervenire ad una formulazione del tipo
e dt R i dt i d
2
k k
k
k
k
k
k
k
dWg dWJ dW *
dove l’energia dei generatori è bilanciata dalla dissipazione per effetto Joule nei conduttori
e dalla variazione di “energia magnetica”.
Il campo B è solenoidale, ed anche la sua variazione temporale dB* è solenoidale, per cui si
potrebbero individuare linee chiuse γ* di dB (la circuitazione di H lungo queste linee deve
dar luogo alla corrente concatenata) e suddividere lo spazio in tubi di flusso di dB.
Ad ognuno di questi tubi di flusso elementare di sezione ΔS* si potrebbe associare un
valore
d *
dB * n dS *
S *
e costruire l’integrale
H dB d *
*
esteso al volume definito dal tubo di flusso elementare dφ* di dB. Procedendo lungo γ* il
flusso si mantiene costante e si avrà
H dB d * H dB dS dl d * H t dl d * n i
k k
*
*
k
dove si sono messi in evidenza gli eventuali concatenamenti multipli n k.
Per un processo finito che porta alla formazione di un campo B in tutto lo spazio, potremo
valutare l’energia magnetica per unità di volume
B
wm H dB
0
Nel caso di mezzi lineari (identificati da una permeabilità magnetica μ costante, l’energia
magnetica spefifica è pari a
B
wm H dB
0
1
1
1 2
H B H 2
B
2
2
2
Nel caso di due spire, l’energia magnetica associata (in tutto lo spazio) vale
Wm
1
B Hd 1 i11 1 i22
2
2
2
Nel caso di mezzi lineari
1
1
1
1
Wm i11 i2 2 i1 L1ii Mi2 i2 L2i2 Mi1
2
2
2
2
1
1
L1i12 L2i22 Mi1i2
2
2
Per il suo significato energetico, tale forma quadratica dev’essere non negativa; ciò implica
che il coefficiente di accoppiamento
k
M
L1L2
dev’essere in valore assoluto non maggiore di 1.
La condizione k2=1 (k=1 se M>0, k=-1 se M<0) vien detta di accoppiamento magnetico perfetto:
in queste condizioni l’energia magnetica è un quadrato perfetto
L
1
1
L
Wm L1i12 L2i22 Mi1i2 1 i1 k 2 i2
2
2
2
2
2
in tal caso, per infinite coppie di valori delle intensità di corrente non nulle
i1 k L2 i2
L1
l’energia magnetica totale risulta nulla, ossia il campo magnetico è nullo in tutto lo spazio;
tale condizione può essere praticamente realizzati con due solenoidi lunghi e sottili,
separati da un sottile strato di isolante.
Per meglio valutare la condizione di accoppiamento magnetico nel caso ad esempio di
trasformatori reali, costituiti ad esempio da due avvolgimenti, si introduce il flusso medio
di auto e mutua induzione per spire
11m
1
N1 i 0
2
21m
1
N1 i 0
2
L1i1
22m 2
N1
N2
i1 0
M i1
12m 2
N2
N2
L2i2
N2
i1 0
M i2
N1
il coefficiente di dispersione magnetica
1d
2d
11m 21m
11m
L1i1 M i1
M N1
N1
N2
1
L1i1
L1 N 2
N1
22m 12m
22m
L2i2 M i2
M N2
N2
N1
1
L2i2
L2 N1
N2
e le induttanza di dispersione
M N1
L1d 1d L1 L1
N2
L2 d 2 d L2 L2
M N2
N1
Si ricava anche che
M2
1 1d 1 2d
k2
L1L2
La condizione di accoppiamento perfetto si realizza quando i due coefficienti di
dispersione sono, oppure quando sono di segno opposto e di valore opportuno (ad
esempio se il primo avvolgimento ha una spira, la seconda ha due spire di cui una copre la
meà della spira del primo avvolfimento: i coefficienti di dispersione valgono 0,5 e -1).
A7.2 – Comportamento dei materiali ferromagnetici
Nel caso dei materiali ferromagnetici assumone rilevanza il comportamento collettivo degli
atomi di materiali in regioni significative (detti domini di Weiss, delle dimensioni anche
superiori al decimo di millimetro).
Si consideri propedeuticamente un anello di materiale ferromagnetico su cui è predisposto
un avvolgimento di N spire (18). Il campo H vale
H ( r ) r r r
1
2
NI
NI
2r0 0
r1
r0
A
18
r2
B
Se il materiale presenta permeabilità molto elevate, la distribuzione di campo magnetico nel ferro non varia quasi per
niente se le N spire sono concentrato in un tratto limitato della periferia dell’anello.
Alimentando l’avvolgimento con intensità di corrente I, ad una variazione di corrente in
un certo intervallo di tempo corrisponderà una variazione del flusso di B e quindi una
tensione valutabile ai morsetti A-B.
Integrando nel tempo per valori di I crescenti fino ad un valore I max si può ricavare una
relazione tra B ed H del tipo in fig……
B
H=NI
/l
Nella figura seguente è riportata la curva di magnetizzazione di una lega al ferro silicio a
grani orientati
Il campo di induzione può essere letto come
B o
NI
J
l
con J intensità di magnetizzazione crescente fino al valore Js di saturazione.
La circuitazione del campo lungo l’asse del toro (nel ferro) risulta
B
t dl NI
o
J
Il termine
0
l
J
0
l
assume il significato di totale corrente molecolare concatenata con la linea
. Con tale linea saranno concatenate le correnti elementari determinate dalle particelle (di
raggio medio r0) poste a distanza non superiore ad r0 dalla linea . Se la densità di
particelle è n, il numero totale di particelle coinvolte è (n r02l); detta im l’intensità di
corrente elementare, la totale corrente molecolare concatenata vale
J
0
l nr02l im n m l Ml
dove m è il momento elementare ed M il momento magnetico risultante per unità di
volume (detto anche intensità di magnetizzazione).
I valori di saturazione sono riportati nella seguente tabella
Materiale
Intensità di Magnetizzazione Ms
[A/m]
Ferro
1.7 106
Ferro-cobalto
1.9 106
Acciaio temprato
1.4 106
Cobalto
1.4 106
Nickel
0.48 106
Magnetite
0.50 106
μ 0Ms [T]
2.1
2.4
1.7
1.7
0.6
0.6
L’induzione magnetica può essere quindi riscritta come
NI
B o
M B o H M
l
Se vi è linearità tra M e B , si può scrivere
B o H B B
o
H r 0 H
1
con permeabilità magnetica relativa
La permeabilità relativa più adoperata è quella differenziale, che si ottiene considerando il
dB/dH nella curva di fig …. La permeabilità iniziale è intprno a 250, poi raggiunge un
massimo (vedi tab. ….) per poi diminuire gradatamente tendendo ad 1.
Materiale
Ferro elettrolitico
Permalloy
(21.8%
Fe-78,2% Ni)
Acciaio (1%C)
Acciaio temprato
Mu-metal
μr
100000
90000
H [A/M]
B [T]
4,8
0,54
350
98
30000
1600
8000
0,7
1
62