CINEMATICA
1. INTRODUZIONE ............................................................................................ 2
2. TRAIETTORIA E LEGGE ORARIA ........................................................... 3
3. ESEMPIO DI CALCOLO DELLA LEGGE ORARIA IN FORMA
PARAMETRICA ................................................................................................. 7
4. VARI TIPI DI MOTO ..................................................................................... 9
5. IL MOTO DI UN GRAVE ............................................................................ 10
6. IL MOTO CIRCOLARE .............................................................................. 11
7. IL MOTO ARMONICO................................................................................ 14
8. MOTI OSCILLATORI SMORZATI........................................................... 17
9. COMPOSIZIONE DEI MOVIMENTI ........................................................ 18
10. RELATIVITA’ GALILEIANA .................................................................. 23
11. ACCELERAZIONE APPARENTE DI CORIOLIS ................................. 24
12. LE TRE LEGGI DI KEPLERO ................................................................. 25
13. IL DIFFERENZIALE DI UNA FUNZIONE DI UNA SOLA
VARIABILE ....................................................................................................... 27
14. DERIVATE IMPORTANTI E REGOLE DI DERIVAZIONE .............. 28
15. DERIVATE PARZIALI .............................................................................. 29
16. GLI INTEGRALI PRINCIPALI ................................................................ 30
17. LE EQUAZIONI DIFFERENZIALI ALLE DERIVATE ORDINARIE 31
18. LE EQUAZIONI DIFFERENZIALI LINEARI ....................................... 32
19. EQUAZIONI DIFFERENZIALI SEPARABILI ...................................... 34
20. APPLICAZIONI DELLE EQUAZIONI DIFFERENZIALI ................... 34
1.INTRODUZIONE
La cinematica consiste nello studio dei movimenti dal punto di
vista dei soli effetti misurabili, senza tenere in alcun conto le cause che
tali effetti determinano. Quest’ultimo è il compito della dinamica. Noi
considereremo essenzialmente il moto di un punto materiale, cioè di
un punto matematico che è libero di cambiare la sua posizione in
funzione del tempo. Le due grandezze fisiche basilari della cinematica
sono dunque la posizione ed il tempo. Con queste due grandezze è
possibile costruire un certo numero di altre grandezze, dette
grandezze derivate, come ad esempio la velocità, l’accelerazione ecc.
Mentre la posizione e’ ovviamente un vettore, il tempo invece è uno
scalare. Infatti per determinare completamente la posizione di un
punto nello spazio sono necessarie tre misure (ad esempio tre
lunghezze cioè le tre coordinate cartesiane), mentre per determinare
completamente l’istante di tempo in cui si verifica un fenomeno è
necessaria una sola misura (ad esempio con un cronometro).
In generale tutte le grandezze fisiche possono essere rappresentate
da un ente matematico del tipo seguente:
a) un numero (scalare)
b) un vettore (n componenti che dipendono da un solo indice)
1. v v i v1,v 2, ,v n
c) una matrice (piu’ componenti che dipendono da almeno due
indici
a11 a12 ... a1n
2.
a21 a22 ... a2n
M
aij
am1 am2 ... am n
i 1,..., m
,
j 1,..., n
Più in generale si possono introdurre i tensori o gli spinori (questi
ultimi nella fisica microscopica).
Lo studio
del moto di un corpo complesso (sia esso solido o
fluido) può sempre essere effettuato considerando il moto di un certo
numero di punti materiali che caratterizzano varie porzioni anche
piccolissime del corpo stesso.
2
2.TRAIETTORIA E LEGGE ORARIA
Studiamo il moto di un punto P nello spazio. Assumiamo che la
geometria sia quella euclidea (cioè valga il teorema di Pitagora per
esprimere la distanza) e che lo spazio sia una funzione continua del
tempo. Allora possiamo parlare di traiettoria del punto nello spazio
usuale a tre dimensioni.
Sia la traiettoria di un punto materiale, allora è possibile
scrivere
3. P f t
la legge oraria in forma vettoriale. La (3) può essere espressa in
forma cartesiana,
x f x t
4. y f y t
z f t
z
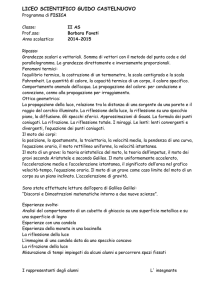
dove il parametro libero è il tempo t. Consideriamo per semplicità
un moto piano
Y
P0
ds
dy
dx
P
X
O
fig.1
Figure 1
allora se ds è il vettore spostamento infinitesimo lungo la
traiettoria del punto mobile (vettore tangente alla traiettoria
ds dx,dy
3
il suo modulo è
ds
dx
cos
dove è l'angolo tra la tangente alla traiettoria nel punto P e
l'asse x. L'equazione della traiettoria nel piano si riduce alla
seguente equazione cartesiana, dopo aver eliminato il parametro
tempo t, y = f(x); derivando si ottiene:
quadrando si ottiene:
df
1 cos2
tg
dx
cos
2
df
cos2 1 cos 2
dx
cos 2
1
2
df
1
dx
cioè
df 2
5. ds 1
dx
dx
L'integrale della formula (5) permette di ottenere la legge oraria in
forma parametrica:
6. s st
quando sia nota l'equazione della traiettoria; s è detta anche
coordinata curvilinea e rappresenta la distanza misurata lungo la
traiettoria del punto P dall'origine P0.
Z
P0
P
s
O
Y
X
fig.2
4
Figure 2
Nella fig.2 s è il versore tangente alla traiettoria nel punto P
s
P s ds Ps dP
ds
ds
ed essendo s s 1 , allora derivando
ds s
ds
2s
0
ds
ds
ds
è perpendicolare al versore s cioè
ds
perpendicolare alla traiettoria . Possiamo allora costruire il versore
normale alla traiettoria
e dunque il vettore
y
s
s
P
r
O
fig. 2a
Figure 3
5
x
Si può dimostrare che in un moto circolare di raggio ( fig. 3) si
ha:
7.
ds
1
ds
Infatti:
x cos
y sen
inoltre
s sen, cos
e ricordandoche
dx
cos
si ottiene
ds
ds
dove
2
dx
sen
ma
dx send
dunque
d
d
sen
dunque derivandoilversores rispettoal suo mod ulosi ottiene
ds sen
ds
1 ds
ds
d
edessendo
ds d sen dcos
1
,
cos ,sen r
d d
d
è cioè un versoredirettoinsenso oppostoal versoredirettocome r.
In conclusioneabbiamodim ostratoche
ds 1
r
ds
6
da cui deriva l'equazione (7).
traiettoria è dunque
Il versore perpendicolare alla
ds
ds
dove è il raggio di curvatura della traiettoria nel punto P .
3.ESEMPIO DI CALCOLO DELLA LEGGE ORARIA IN
FORMA PARAMETRICA
Consideriamo la legge oraria in forma cartesiana del moto rettilineo
ed uniforme:
x k t
y h t
Eliminando il parametro tempo t si ottiene
y
h
x
k
che è l'equazione di una retta con coefficiente angolare
h
tg
k
cioè
h A sen
k A cos
7
Y
P
y
s
O
x
X
fig.2b
Figura 4
In questo caso assai semplice si ricava dalla fig. 4
2
2
2
2
2
2
2 2
s x y h k t A t
cioè la legge oraria in forma parametrica
s At
Si può però applicare l' equazione (5) sostituendo in essa:
dy h
dx k
ottenendo cioè
h 2
ds 1
dx
k
ed integrando
s
h 2 k2
x B
k
essendo B una costante di integrazione, da cui
A
xB
k
s A t B
s
8
4.VARI TIPI DI MOTO
Velocità istantanea
v
dP dP ds ds
1
s v0 s , LT
dt
ds dt dt
da cui si deduce che v è sempre tangente alla traiettoria ed inoltre
si è definita la
Velocità oraria
v0
ds
1
, LT
dt
d
1
, T
dt
Velocità angolare
Accelerazione
a
dv d2 P
2
2 , LT
dt
dt
Accelerazione tangenziale
dv 0
2
, LT
dt
Accelerazione centripeta (normale)
v 2
a c 0 , LT 2
aT
Accelerazione angolare
d d 2
2
2 , T
dt
dt
Odografo
è la descrizione del moto nello spazio v x, vy ,v z delle velocità.
Moto Rettilineo Uniforme
v Cos tante
Moto Accelerato Uniforme
a Costan te
Moto su di un piano
v P Costan te
9
5.IL MOTO DI UN GRAVE
Come applicazione della legge di Newton, che vedremo nel capitolo
seguente, studiamo il moto di un grave, cioè di un corpo che si muove
con accelerazione costante g .
Y
y'
v0
r x,y
V
YV
y
r
O
x
g
Figura 5
v 0 v0x ,v0y
a g 0,g
XV
tg
v0y
v 0x
x'
XG
X
angolodi alzo
l'accelerazione diventa:
d2 x
dx
v 0x
x v0xt
2 0
2
dt
dt
d r
,
, dy
,
2 g cioè 2
dt
g t v0y
d Figura
dy 5
d y
d dy g dt
dt
g
dt
dt 2 dt dt
x v 0xt
1
y g t2 v0y t
2
moto a velocitàcos tante
moto ad accelerazione cos tan te
Eliminando il parametro t si ottiene l'equazione cartesiana della
traiettoria:
v 0y
g
2
y
x
x
2 v20x
v0x
che rappresenta una parabola rivolta verso il basso. Si calcola
facilmente la gittata XG, come intercetta con l'asse x:
2 v0xv0y
XG
g
Si può calcolare anche l'angolo di alzo corrispondente alla massima
gittata, infatti si ha:
10
XG
2 v0x v0y
g
v 2 sen cos cos sen v 2
sen2
g
g
v 0x v0y v 0x v0y
g
che è massima per /4.
Si calcolano facilmente anche le coordinate del vertica V:
v0xv 0y
x V
g
v 20
yV
sen2
2g
da cui si ricava che la massima altezza si raggiunge per un angolo di
alzo /2.
Si può ancora operare una traslazione di coordinate nel vertice V:
x x x V
y y y V
allora l'equazione della traiettoria diventa
g
2
y
2 x
2v0x
6.IL MOTO CIRCOLARE
Il moto circolare è un moto piano in cui la traiettoria è una
circonferenza di raggio R, P R .
y
v
P(x,y )
y
-R
O
fig.3
11
x
R
x
Figure 6
L'equazione oraria nella rappresentazione cartesiana è
x R cos t
8.
y R sen t
derivando rispetto al tempo si ottiene la velocità puntuale
d
v x Rsen t dt
d
v y Rcos t
dt
cioè
v x R sen t
9.
v y R cos t
Nel primo quadrante l'equazione della traiettoria in forma
cartesiana è y R 2 x 2 , l'equazione (5) diventa allora
2
2x
ds 1
dx
2
2
2 R x
x2
1 2
dx
R x2
R2
dx
R2 x2
1
dx
2
x
1
R
1
dx
1 cos 2 t
dx
sen t
il segno meno deriva dal fatto che in figura ad un incremento di s
corrisponde un decremento di x. Si calcola il modulo della velocità
istantanea
12
v
vx
ds
1
dx
dt
sen t dt
sen t
sostituendo vx dalla prima equazione (1.5) si ottiene
10. v R
Verifichiamo ora che il vettore posizione P èsempre ortogonale al
vettore velocità v . Calcoliamo a questo scopo il prodotto scalare
P v xv x yv y R 2 cos sen R 2 sen cos 0
Derivando la velocità (eq. 9) rispetto al tempo si ottiene
l'accelerazione
d
d
sen R cos
a x R
dt
dt
d
d
11. a y R cos Rsen
dt
dt
d
a x R sen 2 cos
dt
d
2
a R
cos sen
y
dt
Si calcola il modulo dell'accelerazione
d
a ax 2 a y2 R
4
dt
2
d
0
Nota 1 : se il moto è uniforme dt
, allora
R 2
cioè a v
Nota 2 : dall’eq. (11) si può decomporre l'accelerazione secondo
due componenti
a acentripeta a tan genziale
essendo
a x centripeta 2 R cos
12. centripeta
2 Rsen
a y
d
tan genziale
R sen
a x
dt
13.
d
R cos
a y tangenziale
dt
da cui si calcolano i moduli
13
a centripeta R 2
tan genziale
d
R
a
dt
Dimostriamo che l'accelerazione centripeta così definita è sempre
perpendicolare alla velocità , cioè è sempre diretta verso il centro
della circonferenza
v a centripeta R sen 2 R cos R cos 2 R sen 0
Dimostriamo che l'accelerazione tangenziale così definita è sempre
perpendicolare alla posizione P , cioè è sempre tangente alla
traiettoria
d
d
P a R cos R
sen R sen R
cos 0
dt
dt
d
Nota 3 : nel caso di un moto circolare uniforme
dt 0
sopravvive soltanto l'accelerazione centripeta .
7.IL MOTO ARMONICO
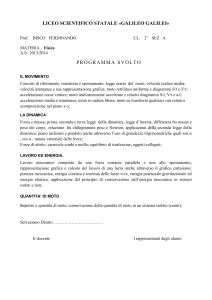
Una applicazione del moto circolare uniforme e’ il moto armonico.
Il moto armonico e’ un moto oscillante attorno ad un centro lungo
una determinata direzione.
Figure 7
Esso è rappresentato dal moto del punto H lungo il diametro
quando il punto P si muove lungo la circonferenza di raggio R con
moto circolare uniforme t + 0. L’equazione del moto armonico
e’ dunque:
14
x = R cos( t + 0).
0 e’ la costante di fase e rappresenta l’angolo a cui si trova il
punto P al tempo t=0, R si chiama ampiezza delle oscillazioni
armoniche e rappresenta il massimo valore di x; la velocità angolare
del punto P è detta pulsazione o frequenza angolare. Si chiama
periodo la durata di un'oscillazione completa; esso si indica con T e si
misura ad esempio in secondi. Si chiama frequenza il numero di
oscillazioni compiuti nell'unità di tempo; essa si indica generalmente
con il simbolo e si misura in hertz (Hz = numero di oscillazioni al
secondo).
= 1 / T =
Il valore
elongazione.
istantaneo
della
posizione
(x),
viene
chiamato
Calcoliamo il tempo T (periodo) al quale il punto H ritorna nella
stessa posizione dopo un giro completo del punto P.
cos( (t+T) + 0)=cos( t + 0+2)
da cui,
T = 2 / .
15
Figura 8
L’importanza dei moti oscillanti è evidente quando si consideri la
loro diffusione nei fenomeni naturali: il pendolo, il trasporto del
calore nei mezzi materiali, il moto sotto l’effetto di una molla, la
propagazione delle onde elettromagnetiche ecc.
Figura 9
Nel paragrafo successivo vedremo che un moto circolare si puo’
considerare anche come la composizione di due moti armonici.
Calcoliamo l’accelerazione nel moto armonico:
x R sen t
x 2 R cost
x 2 x
L’accelerazione è dunque proporzionale all’elongazione.
L’importanza di tale relazione sarà evidente quando si introdurrà la
seconda legge di Newton, che dice che la forza è proporzionale
all’accelerazione. L’ultima delle equazioni precedenti è chiamata
equazione armonica.
16
8.MOTI OSCILLATORI SMORZATI
La formula dei moti oscillatori smorzati è:
x = R cos( t + 0) exp(-t/t0)
questi moti sono l’equivalente del moto armonico quando però il
raggio R diminuisce nel tempo con legge ad esempio esponenziale.
Tali moti si presentano ad esempio nelle oscillazioni in un mezzo
materiale reale cioè viscoso. Nei mezzi materiali si manifestano delle
forze di attrito che si oppongono al moto. Il pendolo reale si comporta
come un oscillatore smorzato per via dell’attrito con l’aria che ne
riduce l’ampiezza di oscillazione al passare del tempo.
Figure 10
Calcoliamo l’accelerazione nel moto oscillatorio smorzato.
x R cost et
x R sen(t) cost et
da cui si ricava
R sent et x x
derivando ancora si ottiene
x R 2 sen t 2 2 cost
in conclusione :
x 2 2 x 2 x
Il primo termine del secondo membro rappresenta l’oscillazione
armonica con pulsazione ’ = sqrt(2+2), mentre il secondo termine
rappresenta lo smorzamento proporzionale alla velocità.
17
9.COMPOSIZIONE DEI MOVIMENTI
Il problema della composizione dei movimenti è così
schematizzabile : noti il moto di un punto P e di un osservatore O’
rispetto ad un osservatore O considerato fisso, determinare la
traiettoria del punto P rispetto all'osservatore mobile O’ ( vedasi
fig.11).
z'
P
r
z
y'
r'
V
o'
R
O
y
x'
x
fig.4
Figura 11
Sia
r f t
l'equazione oraria del punto P rispetto ad O , sia inoltre
R F t
l'equazione oraria dell'osservatore O’ rispetto ad O. Allora per la
composizione galileiana (vettoriale) dei moti , l'equazione del moto di
P rispetto ad O’ è
r ' r R f t Ft
cioè proiettando sugli assi cartesiani ( per semplicità su di un
piano)
x' f x t Fx t
y' f y t F y t
ed eliminando il parametro tempo t si ottiene
y' Y x'
che rappresenta l'equazione della traiettoria di P rispetto
all'osservatore O’.
18
1° Esercizio Il punto P sia in quiete rispetto ad O
x R
y 0
y
y'
O'
O
-R
P
R
x'
x
fig.5
Figura 12
L'osservatore O' si muova rispetto ad O di moto circolare ed
uniforme con velocità angolare = costante , dunque
Fx R cos t
Fy Rsen t
L'equazione del moto di P rispetto ad Ò è dunque
x' f x Fx R1 cos t
y' f y F y Rsen t
che rappresnta la traiettoria di fig.13 , cioè la circonferenza di
partenza traslata lungo l'asse x di un tratto pari al raggio R.
19
y'
O
R
2R
x'
fig.6
Figure 13
L’osservatore O’ dunque vede il punto P muoversi di moto
circolare con traiettoria che passa per l’origine e con la stessa velocità
angolare.
2° Esercizio
Studiamo la composizione di due moti armonici
con la stessa frequenza. Il punto P si muova di moto armonico lungo
y rispetto ad O
y
P
O
y'
O'
fig.7
Figure 14
20
x'
x
f 0
x
f R y cos t y
y
con ampiezza R , pulsazione e costante di fase y. L'osservatore
O’ si muova rispetto ad O di moto armonico lungo l'asse x
Fx R x cos t x
F y 0
con ampiezza Rx , la stessa pulsazione e costante di fase x.
L'equazione del moto di P rispetto ad O’ è dunque
x ' f x F x R x cos t x
y' f y F y R y cos t y
Nota 1 :
Se la differenza di fase è nulla x = y, allora la
traiettoria si riduce ad una retta di equazione
R
y' y x'
Rx
con coefficiente angolare pari al rapporto tra le ampiezze di
oscillazione di P e di Ò rispetto ad O .
Nota 2 : Se la differenza di fase è
traiettoria diventa
cioè x = y allora la
2
2
x' Rx cos t
y' Rx sen t
(dove per semplicità si è posto x = 0 ) una ellisse con semiassi
rispettivamente Rx e Ry . La traiettoria poi si riduce ad una
circonferenza se i due moti armonici hanno la stessa ampiezza.
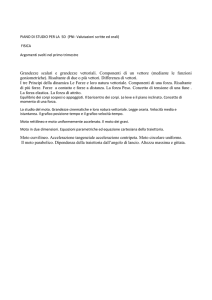
Nota 3 : Nel caso più generale in cui siano diverse sia le costanti
di fase che le ampiezze , si ottengono le classiche Figure di Lissajous
mostrate in fig.15.
21
X
O
X
Y
X
O
O
Y
X
Y
X
O
X
Y
X
O
Y
X
Y
O
O
Y
X
O
Y
fig.8
Figure 15
22
O
Y
10.RELATIVITA’ GALILEIANA
Galileo per primo scoperse un fenomeno che è intrinseco a tutti i
movimenti e che prende il nome di RELATIVITÀ dei moti. Galileo
scoperse che alcune caratteristiche del moto dipendono strettamente
dall’osservatore. In primo luogo la traiettoria di un punto mobile
cambia a secanda dell’osservatore. Galileo, nel Dialogo sopra i due
massimi sistemi del mondo, discute il famosissimo esperimento della
nave:
Rinserratevi con qualche amico nella maggior stanza che sia sotto coverta
di alcun gran navilio, e quivi fate d'aver mosche, farfalle e simili animaletti
volanti; siavi anche un gran vaso d'acqua e dentrovi de' pescetti; sospendasi
anche in alto qualche secchiello, che a goccia a goccia vada versando
dell'acqua in un altro vaso di angusta bocca, che sia posto a basso: e stando
ferma la nave, osservate diligentemente come quelli animaletti volanti con
pari velocità vanno verso tutte le parti della stanza: i pesci si vedranno andar
notando indifferentemente per tutti i versi; le stille cadenti entreranno tutte
nel vaso sottoposto. [...] Osservate che avrete diligentemente tutte queste
cose, perché niun dubbio ci sia che mentre il vascello sta fermo non debban
succeder così, fate muovere la nave con quanta si voglia velocità; che (pur che
il moto sia uniforme e non fluttuante in qua e in là) voi non riconoscerete
una minima mutazione in tutti li nominati effetti, né da alcuno di quelli
potrete comprendere se la nave cammina o pure sta ferma [...] le gocciole
cadranno come prima nel vaso inferiore, senza caderne pur una verso poppa,
benché mentre la gocciola è per aria, la nave scorra molti palmi; i pesci nella
lor acqua non con più fatica noteranno verso la precedente che verso la
susseguente parte del vaso [...] e finalmente le farfalle e le mosche
continueranno i loro voli indifferentemente verso tutte le parti . . .
Qui è messo in evidenza il fatto che un osservatore sulla nave in
moto vede i movimenti degli oggetti in modo diverso da un
osservatore sulla terra (vedasi figura).
23
Siano O ed O' due osservatori con gli stessi orologi e sia P il punto
materiale di cui essi studiano il moto. Sia V la velocità con cui
l'osservatore O' si muove rispetto ad O, allora
dR
V
dt
Poichè vale la relazione di somma dei vettori (riferendosi alla fig.
11)
1. R r ' r 0
si ottiene la relazione notevole, derivando membro a membro
rispetto al tempo:
dr ' dr dR
dt
dt dt
cioè
2. v ' v V
dove
v = velocità del punto P misurata dall'osservatore O
v ' = velocità del punto P misurata dall'osservatore O'.
Nel caso in cui il sistema di riferimento O' si muova di moto
rettilineo ed uniforme V = costante, allora l'equazione (1) diventa :
3. r ' r t V
L'equazione (2) è la legge di composizione delle velocità di
Galileo, mentre l'equazione (3) è la legge di trasformazione di Galileo.
Derivando rispetto al tempo l'equazione (2) si ottiene la legge di
composizione delle accelerazioni :
4. a ' a A
dV
dove A
è l'accelerazione con cui O' si muove rispetto ad O e
dt
si chiama accelerazione apparente.
11.ACCELERAZIONE APPARENTE DI CORIOLIS
Consideriamo due osservatori: O (x,y,z) fermo ed O’(x’,y’,z’) che
ruota rispetto ad O attorno all’asse z’=z con velocita’ angolare
costante . Sia P un punto che si muova con velocita’ radiale costante
rispetto ad O. Vogliamo dimostrare che rispetto all’osservatore
ruotante O’ il punto P si muove di moto accelerato. Tale
accelerazione, che e’ apparente perchè indotta soltanto dal moto
dell’osservatore O’, si chiama accelerazione di Coriolis ed è
24
proporzionale alla velocità con cui P si muove rispetto ad O ed alla
velocità angolare con cui O’ si muove sempre rispetto ad O. Questa
accelerazione apparente si verifica ad esempio sulla Terra che e’ in
moto rotatorio attorno al suo asse polare.
Risulta dunque che il punto P, che si muove di moto rettilineo
uniforme rispetto all’osservatore O, si muove di moto accelerato
rispetto ad O’, con accelerazione proporzionale alla sua velocità ed
alla velocità angolare con cui O’ ruota. Il doppio di aO’ si chiama
accelerazione di Coriolis. Si dimostra facilmente che l’accelerazione di
Coriolis è perpendicolare al vettore velocità v’ misurato da O’, oltre
che al vettore velocità angolare. Infatti:
v x cos v y sen
v ' R( )v
v sen v cos
y
x
ed e' facile dim ostrare che:
ao' v ' 0
Possiamo dunque concludere che:
ao. v '
12.LE TRE LEGGI DI KEPLERO
Le tre leggi sperimentali che regolano il moto planetario sono
state enunciate all’inizio del XVII secolo dall’astronomo tedesco
Giovanni Keplero.
Le leggi furono formulate su base empirica a partire dai dati
raccolti dall’astronomo danese Tycho Brahe, e solo con la teoria della
gravitazione universale di Isaac Newton trovarono una soddisfacente
spiegazione teorica. Negando l’antichissimo principio secondo cui i
pianeti si muovevano attorno al Sole su orbite circolari.
La prima legge di Keplero afferma che essi orbitano attorno al Sole
percorrendo traiettorie ellittiche delle quali il Sole occupa uno dei
fuochi.
La seconda legge stabilisce che la retta (il raggio vettore) che
congiunge un pianeta al Sole descrive aree uguali in tempi uguali; ciò
significa che ogni pianeta percorre più rapidamente i tratti di orbita
più vicini al Sole.
25
Infine, la terza legge afferma che il rapporto tra il cubo della
distanza media, d, di un pianeta dal Sole e il quadrato del suo periodo
di rivoluzione è costante; cioè il rapporto d3/t2 è lo stesso per tutti i
pianeti.
Assumiamo in prima approssimazione che la traiettoria di un
pianeta sia circolare col sole nel centro e raggio R.
Verifichiamo la seconda e la terza legge dalle proprietà del moto
circolare.
Seconda Legge.
Poiche’ l’area descritta dal raggio vettore dopo un angolo e’:
A R2
1 2
R
2 2
e poiché il moto e’ circolare uniforme:
t
con velocità angolare costante, allora:
A
R 2
t,
2
quindi il raggio vettore del pianeta percorre aree uguali in tempi
uguali.
Terza Legge.
Poichè nell’approssimazione del moto circolare
accelerazione che agisce sul pianeta è quella centripeta ac :
l’unica
ac = R w2,
Per la legge di Newton il l’accelerazione e’ proporzionale alla
forza (in questo caso la forza di gravità) e dunque è inversamente
proporzionale al quadrato del raggio:
ac
si ricava dunque:
26
1
R2
1
R 2 2 ,
R
1
R3 2 T 2
essendo inversamente proporzionale al periodo.
E’ importante notare che in realtà Newton ricavò la sua legge
proprio partendo dalle leggi di Keplero, ipotizzando l’esistenza di
una forza gravitazionale che doveva essere inversamente
proporzionale al quadrato della distanza.
13.IL DIFFERENZIALE DI UNA FUNZIONE DI UNA SOLA
VARIABILE
Figure 16
Consideriamo una funzione y = f(x) rappresentata nel piano (x,y).
Si ottiene:
f tg x
dunque passando al limite per x0 si ottiene:
f df
x dx
tg f '
essendo f ‘ la derivata della funzione f nel punto x. Dunque:
df f ' dx
27
df prende il nome di differenziale della funzione f nel punto x e
rappresenta di quanto varia f al variare di una quantità infinitesima
della variabile x.
14.DERIVATE IMPORTANTI E REGOLE DI
DERIVAZIONE
formula notevole del differenziale:
d(f g) = f dg + g df
f’(x) > 0
f’(x) < 0
funzione crescente
funzione decrescente
Formula di integrazione per parti.
Dalla formula di derivazione del prodotto di due funzioni f e g
(fg)'=f'g+fg'
si ottiene
da cui
28
15.DERIVATE PARZIALI
Consideriamo una funzione di due variabili
f(x,y)
Se fissiamo il valore di una delle due variabili, ad esempio x=xo,
la funzione viene a dipendere dalla sola variabile y e dunque ha senso
calcolarne la derivata ordinaria rispetto a y:
f x, y
df x0 , y
dy
y xxo
il primo membro si chiama derivata parziale di f rispetto a y nel
punto x0.
29
Figure 17
Si può allora definire il differenziale di una funzione di due variabili
nel modo seguente:
df
f
f
dx dy
x
y
e più in generale:
df x1, x2 ,..., xn i1,n
f
dx
xi i
16.GLI INTEGRALI PRINCIPALI
a dx a x
a f x dx a f x dx
u v dx u dx v dx
1
x
dx ln x
x n dx
x n1
, n 1
n 1
30
e x dx e x
1
a
eax dx eax
b ax dx
1
b ax ,b 0
a ln b
1
a
senax dx cosax
1
a
tan ax dx ln cosax
cosax dx senax
ax 1 ax
e
a2
2
2
1
x ex dx ex
2
x eax dx
DIFFERENZIALI ALLE DERIVATE
17.LE EQUAZIONI
ORDINARIE
Un’equazione differenziale ordinaria è sempre rappresentabile
nella forma:
F(x,y,y’,…,y(n)) = 0,
dove y(x) è una funzione incognita della variabile indipendente x
ed y(i) e’ la derivata ordinaria di ordine i-esimo.
Un teorema fondamentale afferma che esiste una funzione
y(c1,…,cn;x) che dipende da n costanti arbitrarie ci (i=1,…,n) detta
integrale-generale, che verifica identicamente l’uguaglianza precedente.
Se si assume una n-pla di valori ben definiti per ci, allora
l’integrale generale si chiama più propriamente integrale particolare
dell’equazione differenziale. Un modo per determinare le n costanti
arbitrarie, cioè per passare dall’integrale generale all’integrale
particolare, consiste nel definire n equazioni di vincolo, cioè n
condizioni iniziali:
31
y' x0 y1
.
.
y(n) x y
0 n
dove x0 è detto valore iniziale della variabile indipendente ed yi
sono n parametri noti. Le condizioni iniziali permettono di
determinare i valoridelle costanti arbitrarie.
18.LE EQUAZIONI DIFFERENZIALI LINEARI
Le equazioni lineari del tipo:
an(x)y(n)(x)+an-1(x) y (n-1)(x)+ . . . +a1(x)y’(x)+a0(x)y(x) = Q(x)
sono dette equazioni differenziali lineari. Dove ai(x) e Q(x) sono
funzioni note.
Se tutte le funzioni ai sono costanti, allora si ottiene la seguente
equazione differenziale lineare a coefficienti costanti:
any(n)(x)+an-1y (n-1)(x)+ . . . +a1y’(x)+a0y(x) = Q(x)
Esiste un teorema che afferma che l’integrale generale di tale
equazione si può ottenere risolvendo l’equazione algebrica
caratteristica, che si ottiene sostituendo alle derivate le potenze di una
variabile complessa z con la convenzione che la funzione y sia la
derivata di ordine zero della funzione stessa:
anzn+an-1z n-1+ . . . +a1z+a0 = 0.
L’equazione caratteristica ammette sempre n soluzioni (zeri) nel
campo complesso zi (i=1,…,n), per il teorema fondamentale
dell’algebra. Allora l’integrale generale dell’equazione differenziale
lineare omogenea (Q=0) è:
yO(c1,…,cn;x) = c1 exp(z1x) + c2 exp(z2x) + . . . + cn exp(znx).
Essendo ci (i=1,…,n) le n costanti arbitrarie.
32
L’integrale generale dell’equazione non omogenea (Q(x) 0) è
allora
yG(x) = y(c1,…,cn;x) + f0(x),
essendo f0(x) un qualsiasi integrale particolare dell’equazione
lineare a coefficienti costanti non omogenea.
Esempio:
Consideriamo l’equazione differenziale lineare a coefficienti
costanti omogenea:
y”+y = 0
L’equazione caratteristica e’:
z2+1 = 0
e gli zeri sono:
z 1,2 = i
dunque l’integrale generale e’:
y = c1 eix + c2 e-ix
E’ facile verificare che l’equazione di partenza ammette anche i
seguenti integrali particolari:
y = cos x
y = sen x
Ricordando che dalla formula di Eulero si ha la seguente
rappresentazione complessa delle funzioni seno e coseno:
cos x
eix eix
2
eix eix
2i
Si ottiene che il coseno è l’integrale particolare che corrisponde
alle seguenti costanti
c1=c2=1/2
ed il seno corrisponde invece alle seguenti costanti
c1 = i/2 ; c2 = - i/2
senx
33
19.EQUAZIONI DIFFERENZIALI SEPARABILI
Le equazioni differenziali del tipo:
dy/dx = h(x)g(y)
si chiamano separabili (perchè si possono portare al primo
membro tutti i termini che dipendono solamente dalla variabile
dipendente y ed al secondo membro tutti i termini che dipendono
soltanto dalla variabile indipendente x) e sono facilmente integrabili
perchè diventano:
g(y) = 0, che fornisce la soluzione costante e
(1/g(y)) dy = h(x) dx
in cui i due membri possono essere integrati separatamente.
Esempio:
y’ - xy = 0
La soluzione y=0 e’ la soluzione costante e separando le variabili
si ha:
1
y
dy x dx
ln y
1 2
x ln y0
2
1 2
x
y y0 e 2
20.APPLICAZIONI
DELLE EQUAZIONI DIFFERENZIALI
1. Il decadimento degli atomi radioattivi.
a. I nuclei degli atomi dei materiali radioattivi decadono,
cioe’ si trasformano in altri nuclei, ad una frequenza che
e’ proporzionale al numero totale di atomi di tale
sostanza, cioe’ (essendo k una costante di decadimento
positiva):
dN(t)/dt = -k N(t)
b. Tale equazione differenziale si può integrare mediante
la separazione delle variabili,
c. dN/N = -k dt
34
d. dunque: ln N = -kt +lnN0 essendo N0 il numero costante
di atomi presenti al tempo t=0.
e. In definitiva: N=N0 exp(-kt)
35